
Safety Education Method for Older Drivers to Correct
Overestimation of Their Own Driving
Akio Nishimoto
1
, Rinki Hirabayashi
1
, Hiroshi Yoshitake
1a
, Kenichi Yamasaki
2
, Genta Kurita
2
and Motoki Shino
1
1
Graduate School of Frontier Sciences, The University of Tokyo, 5-1-5 Kashiwanoha, Kashiwa, Chiba, Japan
2
Mitsubishi Precision, Co., Ltd., 345 Kamimachiya, Kamakura, Kanagawa, Japan
{kyamasaki, genta}@mpcnet.co.jp, motoki@k.u-tokyo.ac.jp
Keywords: Older Drivers, Safety Education, Overestimation, Optimism.
Abstract: Older drivers tend to overestimate their driving ability. This overestimation makes it difficult for them to drive
safely. We considered why older drivers formed their overestimation and proposed a safety education method
to correct it. The proposed method includes simulated experiences of collisions and near-miss events and
reflection on their driving at the events. The proposed method was found effective for older drivers to correct
their overestimation based on a participant experiment. However, compared to non-older drivers, the older
drivers corrected their overestimation less. To investigate the reasons for this result, we analysed the method’s
effectiveness on older drivers. Analysis results suggest that the optimistic interpretation of their own driving
discourages older drivers from correcting their overestimation.
1 INTRODUCTION
In many countries, the number of older licenced
drivers is rapidly increasing (Newnam et al., 2020).
Especially in Japan, the number of older licenced
drivers has increased ten times in the last ten years,
and the ratio of traffic accidents caused by them has
increased drastically (Japanese police department,
2019). Therefore, traffic accidents by older drivers
have become an urgent issue that must be solved.
Countermeasures to prevent traffic accidents by
older drivers include promoting the return of driver’s
licences, developing autonomous driving technology
or advanced driver-assistance systems, and driver
education. However, driving a car is essential to live
for some older people (Yanagihara 2019). Thus,
promoting the return of their licence greatly impacts
their quality of life. Moreover, even if autonomous
driving technology and driver-assistance system are
used, drivers still need to drive most of the time on
their own for now. Accordingly, improving the
effectiveness of safety education is important to
reduce traffic accidents by older drivers.
One of the important aspects of safe driving for
older drivers is self-assessment of their own driving.
a
https://orcid.org/0000-0001-6875-0957
Although the decline in driving ability may be
inevitable due to cognitive and physical decline with
age, if older drivers can correctly identify their driving,
older drivers can drive safely (Anstey et al., 2005).
Meanwhile, most older drivers are overconfident in
their driving ability (Ota et al., 2004). Therefore, safety
education, which lets older drivers estimate their real
driving ability and correct their overestimation, is
important for them to drive safely.
The overestimation of drivers is said to be formed
by their daily driving experience. Concretely, drivers
do not often encounter accidents or near-miss events,
even if they drive dangerously (Matsumura, 2011).
Moreover, if drivers experience collisions or near-
miss events, they often do not reflect them in their
driving by considering them exceptions or blaming
other traffic factors (Job, 1990). In other words,
drivers form their overestimation because they have
few opportunities to correct their overestimation in
their daily driving, and even if they face such events,
the events alone do not lead them to correct them.
Therefore, safety education considering this
formation process of overestimation is required.
This study proposes a safety education method
that is effective for older drivers to correct their
326
Nishimoto, A., Hirabayashi, R., Yoshitake, H., Yamasaki, K., Kurita, G. and Shino, M.
Safety Education Method for Older Drivers to Correct Overestimation of Their Own Driving.
DOI: 10.5220/0011804900003417
In Proceedings of the 18th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2023) - Volume 2: HUCAPP, pages
326-334
ISBN: 978-989-758-634-7; ISSN: 2184-4321
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

overestimation of their own driving. To achieve this
goal, we considered why drivers formed their
overestimation, developed methods to correct it, and
verified and discussed the method’s effectiveness for
older drivers.
This paper is organized as follows. Section 2
describes and proposes the education method which
aims for older drivers to correct their overestimation.
Section 3 describes the experimental method to verify
the effectiveness of the proposed method for older
drivers. Section 4 describes the experiment’s results
showing whether the proposed method was effective.
Section 5 discusses the effectiveness of the proposed
method. Lastly, Section 6 summarizes the findings of
this study.
2 EDUCATION METHOD
In this study, two points that form overestimation in
driving were focused on: lack of experiences of
collisions and near-miss events and difficulty in
reflecting such experiences in their own driving. Thus,
an education method was developed which meets the
following two requirements:
• Enable drivers to experience collisions and near-
miss events
• Enable drivers to reflect collisions or near-miss
events in their own driving
The following two sections (Sections 2.1 and 2.2)
describe the method that satisfies the requirements.
2.1 Experience Collisions or Near-Miss
Events
A driving simulator was used to have participants
experience collisions and near-miss events because
simulators can reproduce such events safely. The
scenario where drivers pass through a narrow street
with blind corners and pedestrians running out from
the corners was chosen as the simulation scenario
(Figure 1). This scenario was chosen because older
drivers are more likely to cause accidents in this
scenario.
When using simulators in education, it is
important to make the participants think that the
simulated experience is reasonable and can imagine
their problems (Nakamura, 2007). First, to make the
participants think that the simulated collisions or
near-miss events are reasonable, participants are
given the experience of collisions or near-miss events
based on their own driving by the following steps.
Figure 1: A sample scenario reproduced inside the driving
simulator that the participants experience.
1. Participants drive a simulator course without
pedestrians running out from the blind corners,
and their driving behaviour is recorded.
2. Participants watch the driving behaviour
recorded in the 1st step from the first-person’s
perspective using the simulator, and a pedestrian
runs out from a certain blind corner.
Pedestrians running out from the blind corners
were set to start moving 1.2 seconds before the
vehicle reached the pedestrian to reproduce a risky
situation. By having the participants experience the
events based on their own driving behavior, they were
likely to think that the collisions or near-miss events
could happen in their real driving.
Second, to enable the participants to imagine what
is problematic through the simulated experience, we
focused on what task is done during driving and to
simplify the driving task. When drivers sense danger
in the traffic environment, they first detect hazards
that may cause danger (Hazard perception) and
estimate the risk of the hazard (Risk perception)
(Shino et al., 2012). Thus, we created two types of
scenarios that focus on each of them respectively to
make the driving task simple. In the hazard-
perception scenario, an alarm rings before the
pedestrian runs out so that the participants can focus
on detecting hazards by estimating the risk of hazards
high compulsory. In the risk-perception scenario, a
red mark was placed above all hazards that may run
out so that the participants could focus on estimating
the risk of hazards by enabling compulsory detection
of hazards. In this way, when the participants
experienced collisions or near-miss events in the
simulated driving, they were promoted to consider the
cause of the events and reflect on the problem of their
driving behaviour. The method’s effectiveness in
giving participants experience of collisions and near-
miss events by dividing into these two scenarios has
already been validated in our previous work
(Nishimoto et al., 2021).
2.2 Reflect Collisions or Near-Miss
Events in Their Own Driving
In this study, the coaching method, which is
sometimes used in driving education, was adopted.
Safety Education Method for Older Drivers to Correct Overestimation of Their Own Driving
327

Unlike teaching, this method encourages students to
realize their driving problems voluntarily through a
dialogue about their driving between them and their
coaches. This method was proven effective in
correcting self-assessment (Renge et al., 2010). Thus,
we let the participants speak with the experimenter
about the experiences of collisions or near-miss
events in the simulator based on this method to
promote them to realize their driving problem. To
learn lessons that can be applied in real life from
simulated near-miss events, Nakamura (2007) points
out that the following three points are important:
(a) Whether the students recognize the simulated
experiences as a near-miss event
(b) Whether the students understand the cause of
the near-miss event
(c) Whether students acquire measures that can be
used in actual situations
Based on these points, in this study, we had the
participants answer the following three questions just
after the simulated experiences of collisions or near-
miss events to promote them to learn lessons from
experience:
(a) How did you recognize this situation with a
pedestrian running out from a blind corner?
(b) What do you think caused this collision or
near-miss event?
(c) Have you ever experienced a similar situation
in the past?
This coaching method lets the participants think
and answer these questions voluntarily. However, for
question (b), the experimenter sometimes assists them
in thinking about the cause of the experience (e.g.,
“Did you detect the pedestrian fast?” or “How was the
speed of the car?”). In addition, for question (c), the
experimenter encouraged the participants to recall
and answer concrete situations if they had a similar
experience in the past.
3 EXPERIMENT METHOD
A between-subjects design experiment was conducted
to verify the effectiveness of the education method for
older drivers proposed in the previous section. The
method’s effectiveness was evaluated regarding the
change in self-estimation (overestimation) and on-road
driving behaviour. The details are described in the
following sections. This experiment was conducted
with the approval of the Ethics Committee of the
University of Tokyo.
3.1 Participants
The participants were 20 older participants and 20
non-older participants for comparison. The older
participants were recruited from a human resource
centre that offers a temporary jobs to older residents
in Kashiwa, Chiba, Japan. All of them were 70 years
or older (mean age = 74.1, SD = 3.0), driving
routinely (mean number of days per week to drive =
5.5, SD = 1.9), and had no cognitive impairment. The
non-older participants who live or work near the
Kashiwa Campus of The University of Tokyo were
recruited. They aged between 26 to 46 years (mean
age = 41.5, SD = 6.0) and driving routinely (mean
number of days per week to drive = 5.3, SD = 2.3).
3.2 Equipment
Figure 2 shows the driving simulator used in this
study. The scenario inside the simulator was created
with the simulator software D3sim (Mitsubishi
Precision Co., Ltd.). During the simulator driving, the
eye movements of the participants were measured
with a glass-type eye-tracking device (Tobii Pro
Glasses 2, Tobii AB). This eye movement data is used
to identify when the participants detected the
pedestrian running out from the blind corners in the
simulator scenario.
An experimental vehicle equipped with a data
recorder was used to evaluate the on-road driving
behavior. The recorder recorded vehicle behaviour
(e.g., position, speed, acceleration), driver operation
(e.g., steering wheel angle, pedal status), and images
acquired from cameras equipped inside the vehicle
(e.g., vehicle front view, driver’s face).
3.3 Outcome Measures
To verify the effectiveness of the proposed method,
we evaluated the change in self-estimation and on-
road driving behaviour. Moreover, to examine
whether the proposed education method was effective
for the participants to correct their overestimation,
their reflection on the simulated experiences was also
evaluated. To assess these, we adopted the following
three outcome measures.
3.3.1 Self-Estimation
To evaluate the change in self-estimation, we made a
questionnaire with the following four items. Each
item was scored on a 7-point Likert scale.
1. Are you aware enough of hazards during
driving?
HUCAPP 2023 - 7th International Conference on Human Computer Interaction Theory and Applications
328

2. Are you capable of detecting hazards during
driving?
3. Are you able to sufficiently estimate risks of
hazards during driving?
4. Are you driving safely overall?
Figure 2: Appearance of driving simulator.
In addition, the participants were ordered to score
each item from absolute and relative perspectives
because drivers often overestimate themselves
compared with other drivers (Matsuura, 1999). An
average of the eight (four items * two perspectives)
scores was set as the self-estimation score. When the
participants scored, they were shown the video of
their on-road driving before the education (described
in the next section) and evaluated that driving to
clarify what driving to evaluate. During the on-road
driving before the education, a driving instructor sat
in the passenger seat and answered the same
questionnaire based on the driving of each participant.
Using the two scores, we set the overestimation score,
which is calculated for each participant by subtracting
the instructor’s score from the participant’s score to
evaluate the change in self-estimation.
3.3.2 On-Road Driving Behaviour
An on-road driving experiment was conducted before
and after the education to evaluate the changes in on-
road driving behaviour. The participants drove a
course set near the campus, which included narrow
streets and intersections with blind corners like the
simulator scenario.
As a target scenario inside the on-road driving to
evaluate the change in driving behaviour, we adopted
a scenario where the participants drive through a stop
intersection with a blind corner (Figure 3). At stop
intersections, it was found that older drivers tend to
drive faster near the stop line and confirm less
towards the left and right when passing the
intersection compared to middle-aged drivers
(Hashimoto et al., 2010). Thus, in this study, we set
the speed when passing the stop line and the ratio of
time spent to confirm towards the left and right when
passing the intersection (confirmation time ratio) as
measures to evaluate on-road driving behaviour.
Figure 3: Appearance of target scenario in on-road driving:
Stop intersection with blind corners.
Figure 4: Experimental procedure.
3.3.3 Reflection on the Simulated
Experiences
To evaluate whether the participants reflected the
simulated experiences in their driving, we adopted the
following three scores: Recognition, Understanding,
and Acquisition. Each was scored based on the
answers to the questions (a) – (c) asked just after
experiencing each simulated scenario mentioned in
Section 2.2.
Recognition score (Answer to question (a))
• 0.0: Recognize it as safe
• 0.5: Recognize it as a near-miss event
• 1.0: Recognize it as a collision
Understanding score (Answer to question (b))
• 0.0: Do not answer driving problems
• 0.5: Answer driving problems with assist
• 1.0: Answer driving problems voluntary
Acquisition score (Answer to question (c))
• 0.0: Do not answer past experiences
• 0.5: Only answer the presence of past
experiences.
• 1.0: Answer the concrete situation of past
experiences.
3.4 Procedure
The experiment was conducted over three days, and
each day was spaced for about one week (Figure 4).
On Day 1, the participants are explained about the
nature of the experiment, drive the simulator to create
customized risky scenarios for education, and drive
on roads. On Day 2, the participants experience the
proposed education method and drive on roads again
after the education. Finally, on Day 3, the participants
Safety Education Method for Older Drivers to Correct Overestimation of Their Own Driving
329
answered the self-estimation questionnaire, drove on
roads, and underwent some cognitive function tests,
which were conducted only on older drivers.
In the education, the participants answer the self-
estimation questionnaire and experience the scenarios
in the simulator. Each participant experienced four
scenarios (two hazard-perception scenarios and two
risk-perception scenarios). First, the participants
answer the self-estimation questionnaire before they
experience any scenarios. Second, they experience
two hazard-perception scenarios, and after each
scenario, they answer the questionnaire and review
their self-estimation score about detecting hazards.
Third, they experience two risk-perception scenarios,
answer the questionnaire, and review their self-
estimation score about estimating risk similarly.
Finally, after experiencing all four scenarios, answer
the questionnaire again and review their self-
estimation score about safety awareness and overall
safety of their driving behaviour.
4 RESULTS
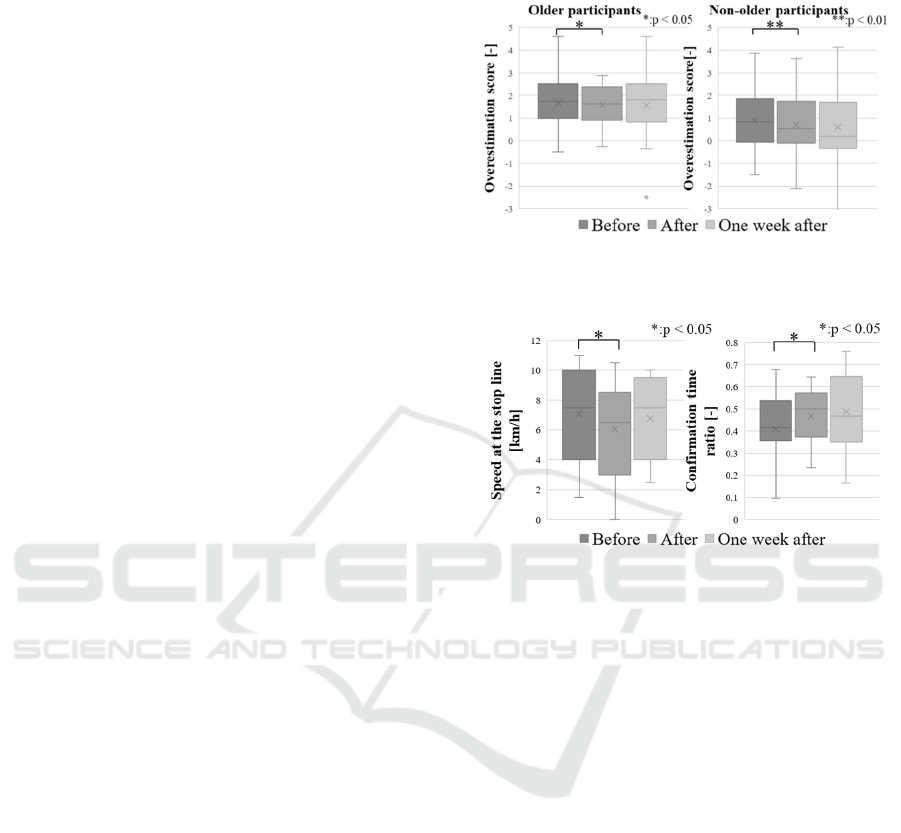
4.1 Self-Estimation
The overestimation score decreased significantly
after the education for both older and non-older
participants (Older: p < 0.05, non-older: p < 0.01)
(Figure 5). Moreover, the mean overestimation score
decreased after the education, and this effect
continued one week after the education. Therefore,
the effectiveness of the proposed education was
confirmed. However, compared to the non-older
participants, the decrease in mean overestimation
score of older participants between before and after
education was small (Older: 0.08, non-older: 0.22). In
addition, the number of older participants who did not
correct their overestimation score was more than the
non-older participants (Older: 6 participants, non-
older: 4 participants). Thus, we confirmed that the
proposed method was less effective for older than
non-older participants.
4.2 On-Road Driving Behaviour
The older participants improved both driving
measures, where the speed at the stop line decreased
and the confirmation time ratio increased after the
education. Moreover, the confirmation time ratio
improvement continued one week after the education,
although the improvement in speed did not (Figure 6).
Therefore, the proposed education was effective in
terms of on-road driving behaviour, reducing unsafe
behaviour at stop intersections.
Figure 5: Change in on-road driving behaviour of older
participants.
Figure 6: Change in overestimation score of older and non-
older participants.
4.3 Reflection on the Simulated
Experiences
The participants tended to correct their overestimation
if they recognized the simulated experience and
understood the cause of it. We plotted the answered
frequency of each combination of recognition and
understanding scores and classified them into two
groups according to whether the participants corrected
their overestimation score after they answered or not:
correcting and non-correcting (Figure 7). The
acquisition score was excluded from the plot because
it was found that the score had less to do with the
correction of overestimation. This plot showed that
recognizing the situation as near-miss events or
collisions and understanding the cause of the situation
was essential for the participants to correct their
overestimation. Therefore, it was shown that the aim of
the proposed method was appropriate, and if the older
participants behaved as expected, they were likely to
correct their overestimation. On the other hand, we
found that older participants did not recognize the
situation as near-miss events and collisions and did not
reflect such experiences in their own driving.
HUCAPP 2023 - 7th International Conference on Human Computer Interaction Theory and Applications
330
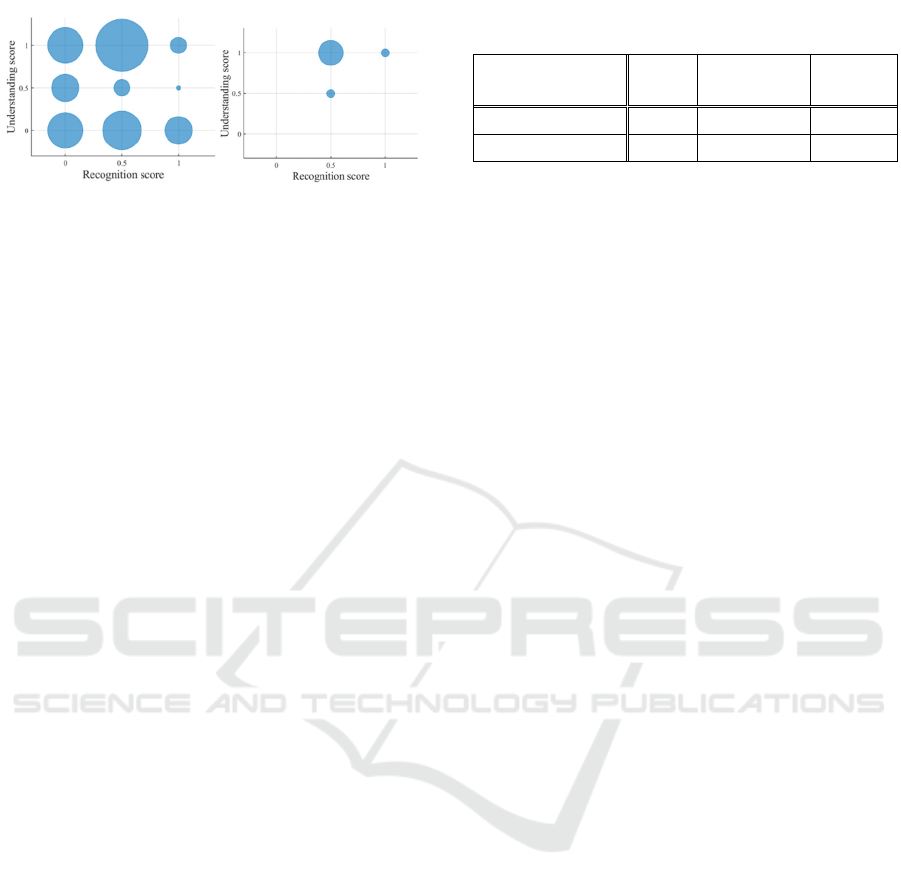
Figure 7: Answered frequency of the combinations of
recognition and understanding scores (Left: non-correcting
group, right: correcting group).
5 DISCUSSION
The results show that the proposed education method
effectively corrected the older participants’
overestimation. However, it was also found that the
older participants were less likely to correct their
overestimation and often did not reflect the simulated
experiences in their driving, contrary to our
expectations. Thus, to reveal why the proposed
method was ineffective for some of them and how the
effectiveness of the education could be improved, we
analysed the participants who did not correct their
overestimation and conducted an additional survey.
5.1 Analysis of Non-Correcting
Participants
To investigate why the non-correcting participants
did not correct their overestimation, we classified the
older participants into correcting and non-correcting
groups according to whether they corrected their
overestimation score and investigated the differences.
First, we analysed the difference of whether each
group recognized the situation as near-miss events
and collisions or not. By comparing the recognition
score in each group, the non-correcting group was
less likely to recognize the situation as a near-miss
event than the correcting group (Table 1). Thus, it was
found that the method to enable participants to
experience near-miss events and collisions did not
work as expected for the non-correcting group. We
further analysed the eye movement data to reveal the
reason for this. In the scenarios, pedestrians appeared
1.2 seconds before a collision uniformly. Thus, if the
participants can detect the pedestrian earlier, they can
easily avoid it. To measure this, we defined the
detecting time as an elapsed time after the appearance
of the pedestrian to when the fixation point
overlapped the pedestrian. We compared the
detecting time between the two groups and found that
the average detecting time of the two groups is alike
Table 1: Comparison of recognition score percentage
between correcting and non-correcting groups.
Group
Safe
(0.0)
Near-miss
(0.5)
Collision
(1.0)
Correcting 25% 58% 17%
Non-correcting 63% 25% 12%
(Correcting: 0.35 seconds, non-correcting: 0.34
seconds). In other words, detecting time did not
influence the recognition of the situation. To make
clear why the non-correcting group did not recognize
the situation as a near-miss event, we plotted the
detecting time corresponding to the “safe (0.0)” and
“near-miss event (0.5)” of both groups (Figure 8).
This figure showed that the non-correcting group
never answered “near-miss event” if the detecting
time was less than 0.3 seconds. Moreover, only the
non-correcting group answered “safe” if the detecting
time was more than 0.4 seconds. This result shows
that each group interpreted the simulated experiences
differently. The non-correcting group tended to feel
the experiences as safe, and the correcting group felt
as a near-miss event.
Second, we analysed whether the correcting and
non-correcting groups reflected the experiences
differently after the near-miss or collision
experiences. To investigate this, we analysed the
difference in understanding scores between the two
groups when the recognition score was 0.5 or 1. This
analysis revealed that the correcting group tended to
answer driving problems such as speed and gaze. In
contrast, the non-correcting group tended to answer
the problems of other factors like the simulator
without admitting their own driving problems (Table
2). Thus, the non-correcting group tended to be
reluctant to interpret their own driving problems,
although the correcting group interpreted them
relatively easily.
The analysis showed that even though the non-
correcting participants were given the opportunities
to have near-miss and collision experiences and to
reflect on their driving behaviour, they interpreted
them optimistically and did not correct their
overestimation. Older drivers are known to have the
characteristics to interpret the effects of their driving
optimistically (e.g., Ferring et al., 2015). Such
optimistic characteristics may have prevented the
older participants from correcting their
overestimation and considering it may be important
to improve the effectiveness of the education.
Therefore, it was suggested that it was required to
reveal the impacts of such an optimistic interpretation
on the older participants and correct overestimation.
Safety Education Method for Older Drivers to Correct Overestimation of Their Own Driving
331
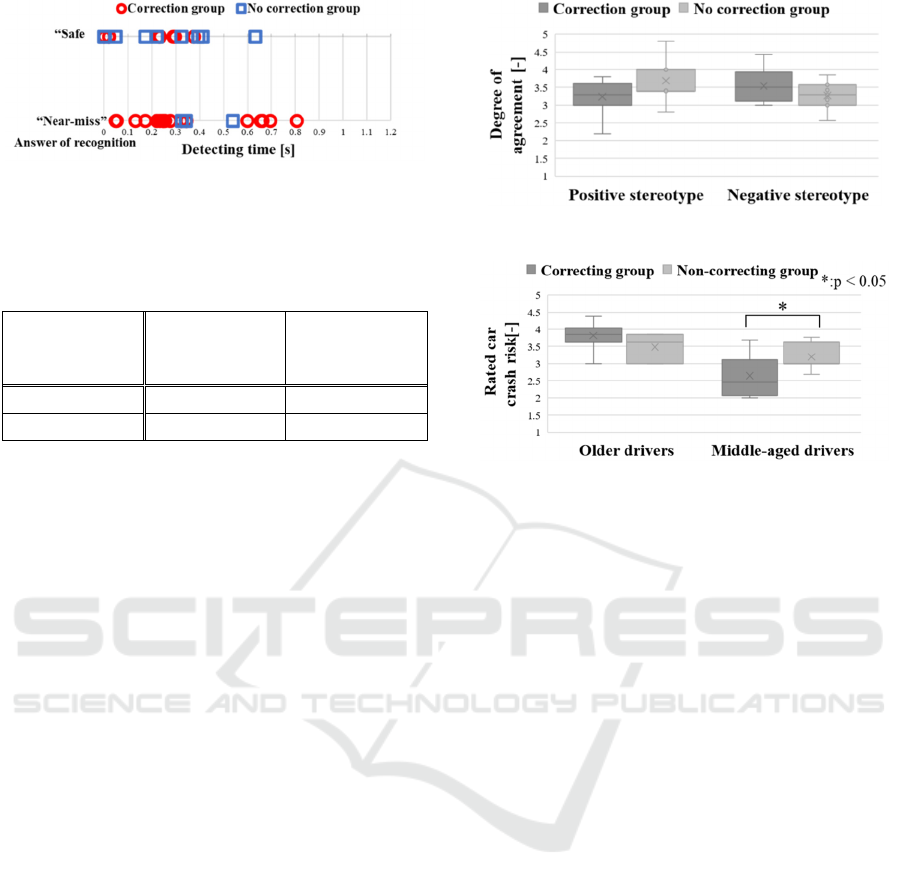
Figure 8: Detecting time corresponding to “safe (0.0)” or
“near-miss (0.5)” answers of correcting and non-correcting
groups.
Table 2: Comparison of understanding score percentage
between correcting and non-correcting groups.
Group
Not driving
problems
(0.0)
Driving
problems
(0.5, 1.0)
Correcting 50.0% 50.0%
Non-correcting 16.6% 83.3%
5.2 Additional Questionnaire Survey
The analysis of the non-correcting group suggested
that the optimistic interpretation impacted correcting
overestimation. We investigated the optimistic
characteristics of the older participants through an
additional questionnaire survey to consider how to
improve the effectiveness of education.
5.2.1 Method
An additional questionnaire survey was conducted on
the older participants to investigate whether the non-
correcting group has an optimistic view of their
driving behaviour. In accordance with the self-
estimation score, we adopted two questionaries that
ask optimistic views from an absolute and a relative
perspective. When they did not correct their
overestimation from an absolute perspective, they
may not have been able to admit their driving ability
declining with age. In a previous work (Ferring et al.,
2015), drivers were asked how much they agreed with
positive stereotypes (e.g., more experience, more
reasonable) and negative stereotypes (e.g., more
dangerous, more error-prone) about older drivers in a
five-point scale questionnaire. The more the drivers
were older, the more likely they were to agree with
positive stereotypes and disagree with negative
stereotypes. This indicates that older drivers tend to
interpret the decline of their driving ability
optimistically. Therefore, we adopted the
questionnaire used in this Ferring’s work and had the
participants answer it. We verified the optimistic
interpretation of their driving ability and considered
Figure 9: Results of the Ferring’s questionnaire.
Figure 10: Results of the Gosselin’s questionnaire.
whether such an interpretation affected the correction
of overestimation.
When the participants did not correct their
overestimation from a relative perspective, they may
not have been able to accept being poor in their
driving ability compared to others. A previous work
(Gosselin et al., 2010) revealed that when the older
drivers assessed the risk of a car crash in other older
and middle-aged drivers in a five-point scale
questionnaire, they answered that the risk is higher in
both drivers compared to themselves. This indicates
that older drivers are likelier to interpret their accident
risk than others optimistically. Therefore, we also
adopted Gosselin’s questionnaire and had the older
participants answer it.
5.2.2 Results and Discussion
As for the stereotypes about older drivers, the non-
correcting group tended to agree with the positive
stereotypes and disagree with the negative
stereotypes compared to the correcting group (Figure
9). As for the crash risk, the non-correcting group
assessed that the risk in middle-aged drivers was
higher compared to the correcting group (Figure 10).
These results showed that the non-correcting group
tended to interpret their driving and especially the
decline of it with age optimistically. This suggests
that their optimistic interpretation influenced
correcting their overestimation, and improving such
interpretation was the key to correcting their
overestimation.
HUCAPP 2023 - 7th International Conference on Human Computer Interaction Theory and Applications
332

In this study, the non-correcting group interpreted
the decline in their driving optimistically, which
meant they were not anxious about their driving
behaviour. This may have made them indifferent to
the education and did not motivate them to change
their belief. This indicates that enhancing participants’
motivation for education may effectively correct
overestimation. In educational technology, Keller’s
ARCS model is known as a measure to enhance
students’ motivation for educational material.
According to this model, improving attention and
relevance to the material is important for students to
be encouraged to try it (Keller, 1987). In this study,
the non-correcting group did not think their driving
needed improvement, which may have impeded them
from having attention and relevance to the education.
Therefore, enhancing attention and relevance to the
education may be the next step to improve the
effectiveness of our method.
5.3 Limitations
There are some limitations in this study. First, the
sample was not large and biased toward active and
healthy males. It is said that male and female older
drivers have different ways of thinking toward their
driving (Ferring et al., 2015). Thus, the effectiveness
of the proposed method for older female drivers may
differ. Second, we did not investigate the long-term
effects of the education, although we checked one
week after the education. We need to continue
investigating the education’s effectiveness because
long-term assessment is important in safety education.
Third, the target scenario in the simulator and on-road
driving was limited to narrow streets and intersections
with blind corners. Older drivers are also likely to
cause accidents in other scenarios. It may not be
obvious that the participants could reflect on their
driving behaviour.
6 CONCLUSIONS
This study proposed an education method to correct
the overestimation of older drivers. This method
enabled the participants to experience near-miss
events or collisions and reflect them in their own
driving. As a result, older people could correct their
overestimation with the method; however, their
correction was less compared to non-older people.
Further analysis and an additional questionnaire
survey revealed that people who did not correct their
overestimation with the method tended to interpret
the simulated experiences and their driving ability
optimistically. It is suggested that this optimistic
interpretation of their driving discouraged them from
correcting their overestimation.
Enhancing the motivation for education is
suggested to be the key to improving the effectiveness
of the education method. The method of enhancing
motivation is fully researched in educational
technology. Therefore, the next step to improve the
method’s effectiveness is to refer to works in
educational technology and consider ways to enhance
the motivation of older participants.
REFERENCES
Anstey, K.J., Wood, J., Lord, S., Walker, J. (2005)
Cognitive, sensory and physical factors enabling
driving safely in older adults: a randomised controlled
trial. Accident Analysis and Prevention. 115, 1-10.
Ferring, D., Tournier, I., Mancini, D. (2015) “The closer
you get…”: age, attitudes and self-serving evaluations
about older drivers. Eur J Ageing. 12, 229-238.
Gosselin, D., Gagnon, S., Stinchcombe, A., Joanisse, M.
(2010) Comparative optimism among drivers: An
intergenerational portrait. Accident Analysis and
Prevention. 42, 734-740.
Hashimoto H., Hosokawa T., Hiramatsu M., Nitta S.,
Yoshida S (2010) Field Survey of a Elderly Driver’s
Behavior at the intersection. Transactions of the Society
of Automotive Engineers of Japan. 41 (2), 527-532.
Japanese police department. (2019) About the
characteristics of the traffic fatal accidents over 30
years in Heisei era.
Job. R. (1990) The application of learning theory to driving
confidence: the effect of age and the impact of random
breath testing. Accident Analysis and Prevention. 22 (2),
97-107
Keller, J. M. (1987) Development and use of the ARCS
model of instructional design. Journal of instructional
development. 10 (2), 2-10.
Matsuura, T., (1999) Drivers’ overestimation of their own
skill. Society of Japanese Psychological Review. 42(4),
419-437.
Matsumura, Y., Tamida, K., Nihei, M., Shino, M., Kamata.,
M. (2011) Proposal of Education Method for Elderly
Drivers Based on the Analysis of their Real Driving
Behavior. The Japan Society of Mechanical Engineers.
20, 321-324.
Nakamura. T. (2007) Anzen kyo-iku ni okeru giziteki na
kiken taiken no kouka to kadai [Effectiveness and
problem of simulated experiences in safety educations].
Japan Society for Safety Engineering. 46(2), 82-88
Newnam, S., Koppel, S., Molnar, L. J., Zakrajsek, J.D, Eby,
D. W., Blower, D. (2020) Older truck drivers: How can
keep them in the workforce as long as safety possible?
Safety Science. 121, 589-593.
Nishimoto. A., Hirabayashi, M., Yoshitake, H., Yamazaki,
K., Kurita, K., Shino, M. (2021) Safety Education for
Safety Education Method for Older Drivers to Correct Overestimation of Their Own Driving
333

Elderly Drivers Based on Self-evaluation Formation
Process. Japan Society Automotive Engineers Autumn
Conference. 128 (21), 1-6.
Ota, H., Ishibashi, T., Oiri, M., Murai, M., Renge, K. (2004)
Self-evaluation Skill among Older Drivers. Japanese
Journal of Applied Psychology. 30 (1), 1-9.
Renge. K., Ota, H., Mukai M., Ogawa, K., (2010)
Effectiveness of Training for Elderly Drivers based on
Coaching Method. Japanese Journal of Traffic
Psychology. 26 (1), 1-13.
Shino, M., Kimura, K., Nihei, M, Kamata, M., (2012)
Analysis on Relation between the Unsafe Driving
Behavior in Actual Environment and the Cognitive
Characteristics of Elderly Drivers. Transactions of the
JSME. 78 (794), 3362-3373.
Yanagihara T. (2015) Koreisya no gaisyutsu hindo kara
mita nitizyouseikatu no-ryoku to idousyudan ni kansuru
kousatu. [Consideration of the effect of frequency of
going out of older people on the means of transportation
and the activities of daily life]. Journal of JSCE. 71 (5),
459-465.
HUCAPP 2023 - 7th International Conference on Human Computer Interaction Theory and Applications
334
