
Multimodal Light-Field Camera with External Optical Filters Based on
Unsupervised Learning
Takumi Shibata, Fumihiko Sakaue and Jun Sato
Nagoya Institute of Technology, Nagoya, Japan
Keywords:
Light Field Camera, Multi-Modal Imaging, External Optical Filters.
Abstract:
In this paper, we propose a method of capturing multimodal images in a single shot by attaching various
optical filters to the front of a light-field (LF) camera. However, when a filter is attached to the front of the
lens, the result of capturing images from each viewpoint will be a mixture of multiple modalities. Therefore,
the proposed method uses a neural network that does not require prior learning to analyze such a modal
mixture image to generate an image of all the modalities at all viewpoints. By using external filters as in
the proposed method, it is possible to easily switch filters and realize a flexible configuration of the shooting
system according to the purpose.
1 INTRODUCTION
In recent years, images that record various informa-
tion about a target object, such as multispectral im-
ages, polarization images, and high dynamic range
(HDR) images, have been in the spotlight. Since these
images contain information that is difficult to handle
in ordinary RGB images, they can be applied to vari-
ous applications by using them for different purposes.
If these information could be acquired and used si-
multaneously, it would be possible to construct an im-
age processing system with higher accuracy. How-
ever, these images often require a dedicated camera,
and it is difficult to simultaneously acquire this infor-
mation from the same viewpoint. Therefore, in this
paper, we investigate a method of acquiring multi-
modal images with a single shot from a single cam-
era. Several methods for acquiring multimodal im-
ages using a single camera have been studied in the
previous years (Horstmeyer et al., 2009), often us-
ing image sensors equipped with special filter arrays.
This makes it possible to acquire various information
depending on the filter, such as multispectral image
(Xie et al., 2019), HDR image, and polarization in-
formation image. However, the filter configuration
cannot be changed immediately with such a special
image sensor, and flexible operation such as changing
the modality according to the purpose is not possi-
ble. Therefore, we propose a method for acquiring
multimodal images using external filters that can be
replaced or combined with other filters.
In order to acquire various information simultane-
ously from a single viewpoint, we focus on a light
field (LF) camera, which is a camera that acquires
4D LF images. The camera can obtain images (sub-
aperture images) equivalent to those taken by multi-
ple cameras at the same time by taking a single shot.
In this study, we consider the simultaneous acquisi-
tion of images through different filters in a single shot
by attaching various filters to each area of the main
lens of the LF camera and taking a picture, as shown
in Fig.1. However, when the filters are mounted on
the front of the camera, the filter position is different
from the optical center, so the ideal group of images
as shown in Fig.1 cannot be obtained directly. Several
modalities are mixed in each subaperture image, and
mixed modal information is lacking. In this research,
we aim to analyze such mixed-modal images taken
from multiple viewpoints to capture multimodal im-
ages with no missing parts in a single shot by a single
camera.
2 MIXED-MODAL IMAGING
USING LFcamera
First, we describe the light field (LF) camera used
in this study, which directly records four-dimensional
information on light rays in a target scene. In this
study, we use a plenoptic camera (Ng et al., 2005)
that realizes LF capturing with a single camera by at-
Shibata, T., Sakaue, F. and Sato, J.
Multimodal Light-Field Camera with External Optical Filters Based on Unsupervised Learning.
DOI: 10.5220/0011801900003417
In Proceedings of the 18th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2023) - Volume 4: VISAPP, pages
483-490
ISBN: 978-989-758-634-7; ISSN: 2184-4321
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
483

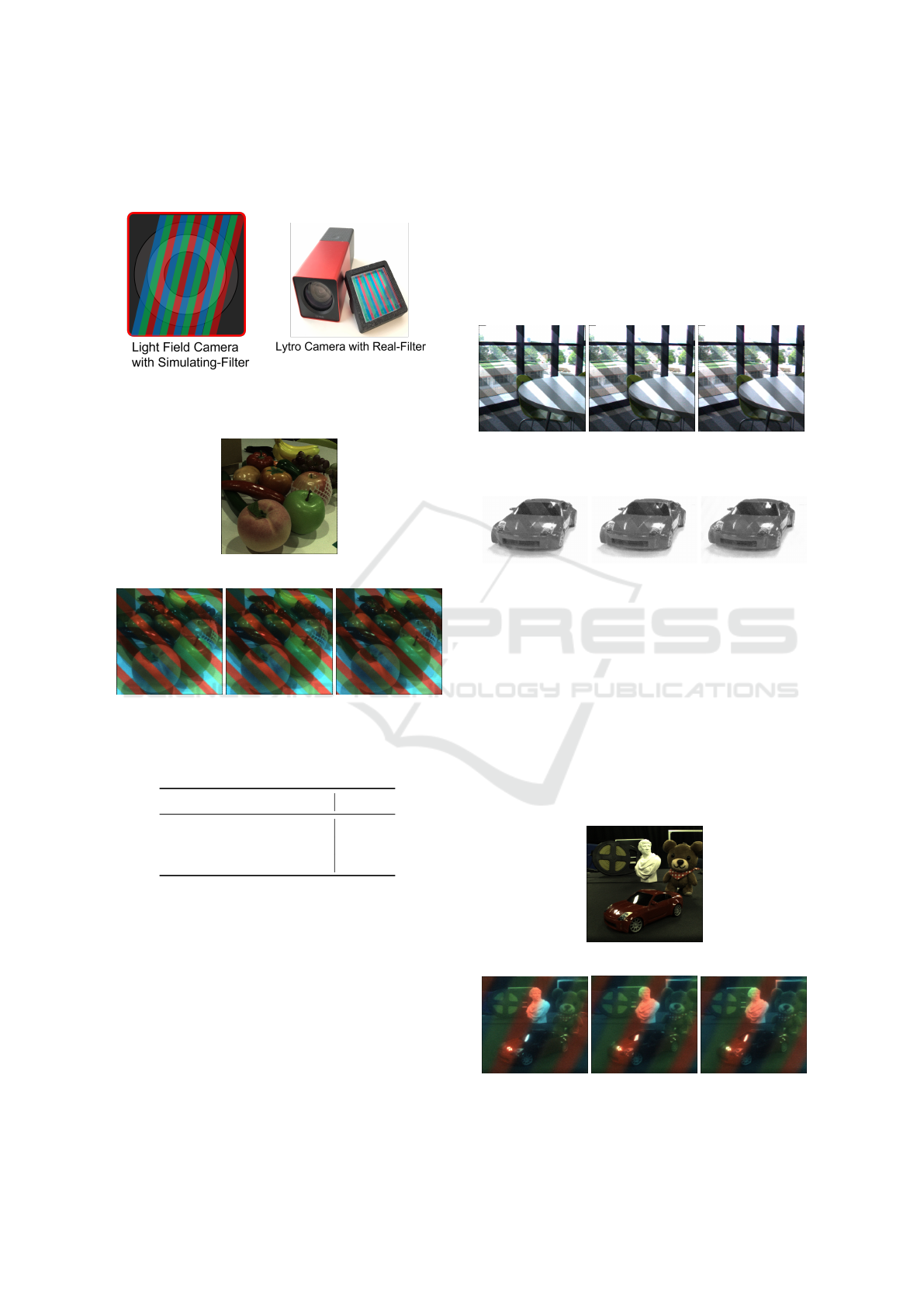
Figure 1: External multi-modal filters for light-field camera
and ideal sub-aperture images.
Figure 2: Image capturing with external multi-modal filters.
taching a microlens array to the image sensor. We
consider what kind of images can be obtained when
an external filter that allows light rays with different
characteristics to pass through each part of the cam-
era is attached to this plenoptic LF camera, as shown
in Fig.2. Now, let us focus on a certain region of
the main lens (subaperture) as shown in Fig.2, and
consider the subaperture image obtained by light rays
passing through this region. In this case, as shown
in the figure, the lens and filter plane are located at
different positions, so each light ray passes through
a different filter depending on the direction of inci-
dence and reaches the main lens. Therefore, even if
a subaperture image is generated from the acquired
LF, it is not possible to obtain a single modal image
corresponding to the filter in front of the subaperture,
and thus, various modalities are mixed in the image.
In this study, we call the image a mixed-modal im-
age. Since the rays passing through each subaperture
change according to the position of the subaperture,
the modal mixed image changes depending on the po-
sition of the subaperture, as shown in Fig.3. The pro-
posed method estimates all unmixed modal images at
all subapertures from the set of such modal mixed im-
ages.
(a) Left Viewpoint Image
(b) Right Viewpoint Image
Figure 3: Difference of mixed modal image according to
the viewpoint.
3 MULTI-MODAL IMAGE
ESTIMATION BY DEEP IMAGE
PRIOR
3.1 Deep Image Prior
In this study, we utilize Deep Image Prior(Ulyanov
et al., 2017) to estimate multi-modal images. Deep
Image Prior uses neural networks as prior knowledge
(Prior) in image generation to achieve natural image
generation. In Deep Image Prior, a noise image N is
input to a neural network with a U-Net structure, and
the output image x is obtained as follows:
x = P(θ, N) (1)
where, P(θ, N) is output from U-net when the noise
N is input to the network and θ is a set of parameters
in the network. Deep Image Prior can generate vari-
ous images by changing the parameter θ of the CNN.
For example, to make the output x closer to the target
image x
o
, the parameter θ is optimized by as follows:
θ
∗
= argmin
θ
||(P(θ, N) − x
o
)||
2
(2)
The reconstructed image P(θ
∗
, N) can be obtained
from the parameter θ
∗
obtained in this way. By chang-
ing this evaluation function according to the pur-
pose, various image processing such as image super-
resolution and inpainting can be realized without prior
learning(Ho et al., 2021)(Rasti et al., 2022).
3.2 Conditions for Image Generation
Next, we consider the constraints imposed on Deep
Image Prior to generate multi-modal images. In this
study, we focus on the fact that the modality infor-
mation that can be obtained from each pixel changes
for each viewpoint in generating each modal image.
Figure3 shows an example of a subaperture image ob-
tained by using a red and blue mixture filter, and it can
be seen that rays of light passing through different fil-
ters are obtained for each viewpoint, even when the
same object is captured. This is because the relative
positional relationship with the filter changes for each
subaperture. Therefore, if the image from each view-
point can be transformed into an image from a dif-
ferent viewpoint, it is possible to acquire information
on various modalities from all viewpoints. Therefore,
a viewpoint transformation network is constructed to
represent the change in image with viewpoint trans-
formation and used for image generation.
Assuming that there is a certain correlation be-
tween the modal images, it is possible to transform
one modal image to another using a neural network.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
484

Therefore, a modal transformation neural network
that transforms each modal image into another modal
image is also trained, and this is also used as a con-
dition for image generation. Furthermore, by sharing
some of these networks, a multi-task learning frame-
work is applied to estimate multimodal images with
high accuracy.
In the following, for the simplification of the dis-
cussion, we will consider the case where images with
different modals are captured using filters that trans-
mit light of red wavelength and blue wavelength, re-
spectively, as shown in Fig.3. Let I
i
be the modal
mixed image taken at viewpoint i. It is also assumed
that at each viewpoint, it is known which modal infor-
mation was acquired at which pixel, and that a mask
M
R
i
replacing the non-red region with 0 and a mask
M
B
i
replacing the non-blue region with 0 are obtained.
Under these conditions, the objective is to bring the
output
ˆ
I
R
i
= P(θ
R
i
, N) and
ˆ
I
B
i
= P(θ
B
i
, N) obtained by
Deep Image Prior to their respective modal images. In
this section, we consider, in particular, the constraints
available when focusing on
ˆ
I
R
i
.
3.3 Image Inpainting Constraint
First, consider the constraint that image inpainting is
used to generate an image from an image of the tar-
get modal contained in a modal mixture. In this case,
the error in the unmasked area becomes the evaluation
function for image generation, as follows:
ε
P
= ||M
R
i
ˆ
I
R
i
− M
R
i
I
i
||
2
(3)
Minimizing this evaluation function yields an image
that mimics the input for regions where red informa-
tion can be captured directly, and an interpolated im-
age based on the input for regions where it cannot be
obtained.
3.4 Constraint from Viewpoint
Transformation
Next, we consider using information from images
taken from different viewpoints by estimating the dis-
parity between the images. In this study, we extend
the method of Luo et al(Luo et al., 2018). to estimate
the disparity. In this method, multiple images are pre-
pared for the image to be viewpoint transformed that
have been shifted by k pixels in advance, and these
are called the shifted image set S
k
(I). A weight map
W
k
representing the weight of each pixel is estimated
for each image in this shifted image group, and the
weighted average of the weight maps is computed to
generate the viewpoint transformation image. The
weight map W
k
indicates from which shifted image
Figure 4: Overview of the Viewpoint Transformation Using
Shifted Image Set.
the pixel values are referenced for each pixel in the
viewpoint-transformed image, and by optimizing this
map, an image that is appropriately shifted according
to disparity can be generated.
In the method of Luo et al. as shown in Fig.4,
the viewpoint transformation is performed according
to the input by learning the relationship between the
input and W
k
in advance. In this study, the viewpoint
transformation is performed by generating this weight
map using Deep Image Prior. However, since the im-
ages handled in this study are modal mixed images,
the number of pixels that can be compared is limited
when directly comparing input images. Therefore, the
viewpoint-transformed image is estimated by com-
paring the generated image
ˆ
I
m
i
(m ∈ {R, B}) at view-
point i with the generated image
ˆ
I
m
j
at viewpoint j.
This optimizes the weight map W
k
j
, which represents
the k pixel shift, for the conversion of the viewpoint j
image to the viewpoint i image as follows:
ε
V
j→i
=
∑
m∈M
||
ˆ
I
m
i
−
∑
k
W
k
j
S
k
(
ˆ
I
m
j
)||
2
(4)
where M = {R, B}. When the generated image is
fixed, this function is an evaluation function for the
viewpoint transformation. On the other hand, if W is
fixed and the generated image is variable, it becomes
a constraint on image generation considering the re-
sult of viewpoint transformation. In this study, the
optimization of W and
ˆ
I is performed simultaneously
to simultaneously perform viewpoint transformation
and image generation.
3.5 Modality Transformation by Neural
Network
Next, consider how to use images from other view-
points and other modalities in image generation. As
shown in Fig.3, since each mixed-modal image is
taken from a different viewpoint (subaperture), the fil-
ter pass points are different. Therefore, there are over-
Multimodal Light-Field Camera with External Optical Filters Based on Unsupervised Learning
485

lapping regions between the modal regions. By learn-
ing the correspondence between each modal from
these overlapped regions, we can transform from one
modal to another.
Now, consider a modality transformation T
R
from
blue to red using the blue region M
B
i
I
i
from the i-th
viewpoint and the red region image M
R
j
I
j
from the j-
th viewpoint. In this case, the loss function ε
B→R
used
for learning is defined as follows:
ε
B→R
=
∑
j(̸=i)
||M
B
i
T
R
(M
B
i
I
i
) − M
B
i
V
j→i
(M
R
j
I
j
)||
2
(5)
where V
j→i
is the function that transforms the j view-
point image to the i viewpoint image by the viewpoint
transformation described earlier. The transformation
function T
R
obtained by optimizing this loss function
is used to transform a blue modal region into a red
modal region. This yields an image T
R
(M
B
i
I
i
) that pre-
dicts the red image from the blue image. Using this,
the following evaluation function is added to the Deep
Image Prior output
ˆ
I
R
i
.
ε
T
= ||M
B
i
ˆ
I
R
i
− M
B
i
T
R
(M
B
i
I
i
)||
2
(6)
By adding this loss function and optimizing
ˆ
I
R
i
, in-
formation from another modal image can be used for
image generation.
3.6 Multi-Modal Image Estimation
Simultaneous optimization of the above evaluation
functions produces the target single-modal image.
The aforementioned evaluation functions include var-
ious functions such as viewpoint transformation,
modal transformation, etc., all of which use the same
image as input. Therefore, by minimizing the sum
of all of these evaluation functions, it is possible to
generate an image that satisfies all conditions. There-
fore, the evaluation function ε
R
i
for estimating
ˆ
I
R
i
is
expressed as follows:
ε
R
i
= ε
P
+
∑
j(̸=i)
ε
V
j
+ ε
B→R
+ ε
T
(7)
In addition, this evaluation function includes the gen-
erated images other than the R-modal images from
the i viewpoints. Therefore, in actual optimization,
all viewpoints and all modal images are estimated si-
multaneously by minimizing ε shown as follows:
ε =
∑
i
∑
m∈M
ε
m
i
(8)
At last, we can estimation of multimodal images for
all viewpoints from any combination of multimodal
filters using only the information from the input im-
ages.
Figure 5: Modality transformation using neural networks.
4 RESULTS
4.1 Using Color Filters
Semi-simulation experiments were conducted to ob-
tain multimodal images using the proposed method.
In the proposed method, by combining as many fine-
grained filters as possible, the overlapped area of each
filter increases, and the estimation accuracy of the
multimodal image can be improved. However, since
it is difficult to create such fine-grained multimodal
filters, we first confirmed the effectiveness of the pro-
posed method in a semi-simulation experiment. In
this experiment, filters covering the entire surface of
the lens were mounted, and images were acquired
through each filter. The captured images were then
combined according to the assumed filter shapes to
obtain a mixed-modal image. in Fig.6(a) the shape
of the filters is shown, with the red, blue, and green
color filters arranged on a slant in front of the lens.
The subaperture images taken from the multimodal
filters arranged in this way are estimated as shown in
Fig.8. We evaluated the proposed method by compar-
ing the results obtained by the proposed method with
those of each of the modalities used to generate the
input images.
The estimated disparity image resulting from the
generation of the center viewpoint multimodal image
by the proposed method and the ground truth image
obtained are shown in Fig.13. The results confirm the
effectiveness of the proposed method, as the proposed
method estimates an image that is very similar to the
ground truth.
On the other hand, the details of the image are not
sufficiently restored, resulting in a slightly blurred im-
age overall. This may be due to the fact that the deep
image prior requires a large number of updates to rep-
resent high-frequency portions of the image, which
can be improved by adjusting the network structure
and the number of optimization cycles. The RMSE
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
486
per pixel of the true value image and the estimated im-
age is kept low at 5.4 on average, as shown in Tab.1,
confirming that the image is generated appropriately.
(a) Simulation
(b) Real Environment
Figure 6: Light field camera and simulated multimodal fil-
ters.
Figure 7: Target scene.
(a) Left image (b) Center image (c) Right image
Figure 8: Input image synthesized from ground truth im-
ages.
Table 1: Evaluation of the proposed method by RMSE.
Modality of the image RMSE
Red 5.122
Green 5.809
Blue 5.385
4.2 HDR Image Synthesis
Next, we show the results of generating HDR im-
ages using the proposed method. In this experiment,
images were captured assuming that three different
types of light-reducing filters with different degrees
of light-reduction were installed. As in the previous
experiment, each filter was placed on a tilt. Each im-
age was captured at three different brightness levels
by adjusting the exposure time.
The input image synthesized from these images
is shown in Fig.9. Based on this image, we esti-
mated different brightness images using the proposed
method. The brightness of each image is estimated
by the proposed method. The HDR image is obtained
by merging these images. The estimated image and
the true value image are shown in Fig.14. The re-
sults show that the HDR image generation was suc-
cessfully performed from a single-shot image, as the
areas where white skipping and blacking out occurred
were well represented in each image.
(a) Left image (b) Center image (c) Right image
Figure 9: Input images synthesized from ground truth im-
ages.
(a) Left image (b) Center image (c) Right image
Figure 10: Input images synthesized from ground truth im-
ages.
4.3 Polarization Image Estimation
Next, we show the results of generating polarization
images using the proposed method. In this experi-
ment, a multimodal filter with a diagonal combina-
tion of polarization filters in four directions (0
◦
, 45
◦
,
90
◦
, and 135
◦
) was attached to the front of the LF
camera, and a modal mixture of images obtained by
simulation was combined. We use this image as an
input image to estimate the four-directional polariza-
Figure 11: Target scene.
(a) Left image
(b) Center image
(c) Right image
Figure 12: Input images.
Multimodal Light-Field Camera with External Optical Filters Based on Unsupervised Learning
487

(a) Synthesized images
(b) Ground truth images
Figure 13: Synthesized images and ground truth.
(a) Synthesized images
(b) Ground truth images
Figure 14: Synthesized images and ground truth.
tion image. Furthermore, the polarization angle maps
were estimated using the polarization images in the
four directions and compared with the true values to
evaluate each of the polarization images generated.
The input images synthesized by the simulation
are shown in Fig.10, and the results of the estimation
using the proposed method and the true value images
using these images are shown in Fig.15. The results
show that the proposed method can generate images
that are close to the true value for each angle. In par-
ticular, focusing on the polarization image of 90
◦
, it
can be confirmed that, unlike the other polarization
images, the reflection of light is reduced and an image
close to the generated image and the true value image
can be generated. Comparing the polarization angle
maps, it can be confirmed that although the estimation
accuracy in the high-frequency region is lower, the
overall image is similar to the true value, indicating
that appropriate image estimation has been achieved.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
488
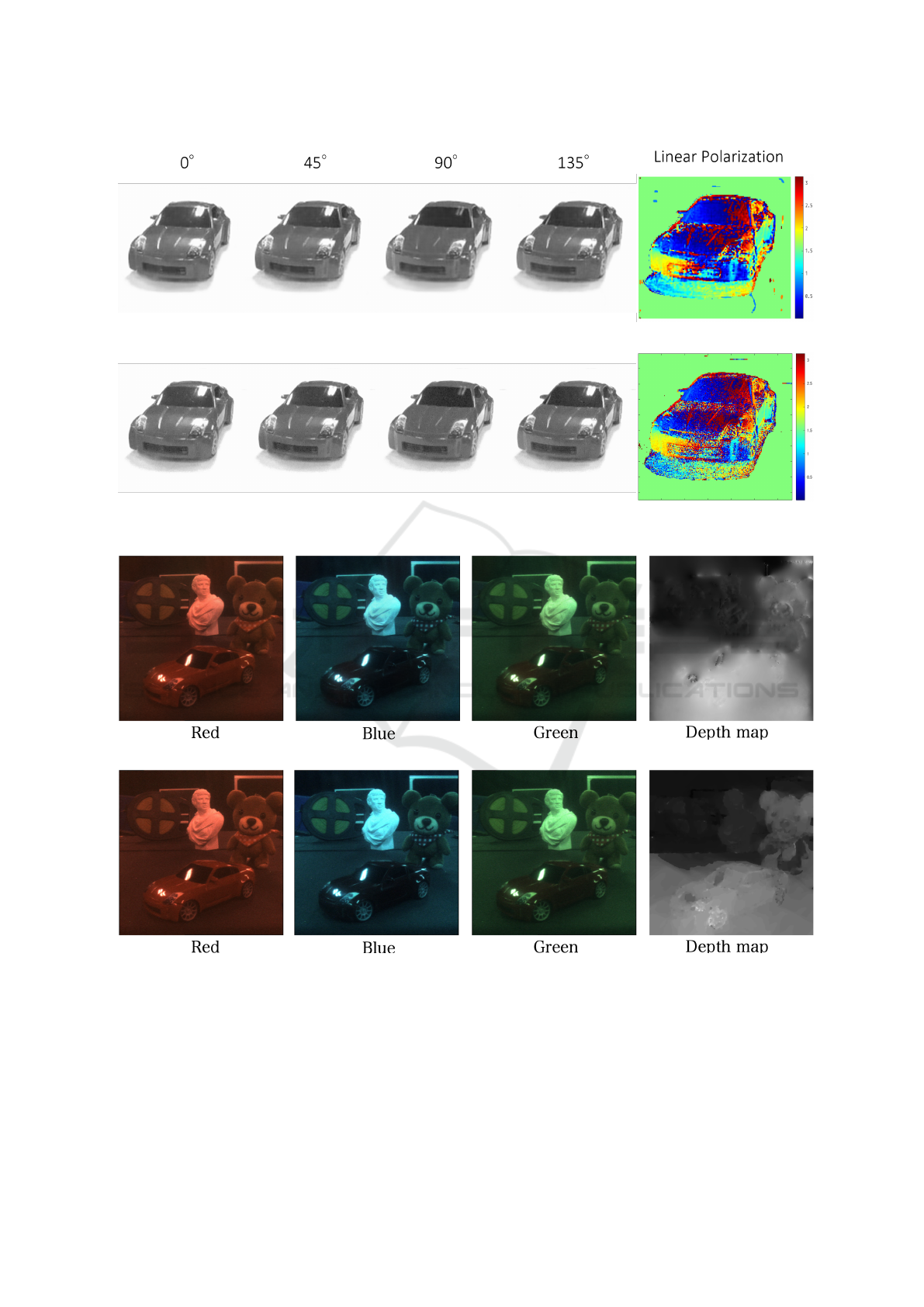
(a) Synthesized images
(b) Ground truth images
Figure 15: Synthesized images and ground truth.
(a) Synthesized images
(b) Ground truth images
Figure 16: Synthesized images and ground truth.
4.4 Real-World Experiments Using
Color Filters
Finally, we show the results of a real-world experi-
ment in which the color multimodal filters that we
actually created were attached. In this experiment,
a multimodal filter consisting of red, blue, and green
color filters cut into strips and arranged diagonally on
the front of the LF camera is attached to the camera
as shown in Fig.6(b). A portion of the modal mixture
of images obtained by this method is shown in Fig.12.
In this experiment, a group of images from 25 verti-
Multimodal Light-Field Camera with External Optical Filters Based on Unsupervised Learning
489
cal and horizontal viewpoints, including the images
in Fig.12, were used as input images to estimate the
images obtained by passing through each filter.
The multimodal and disparity images of the cen-
tral viewpoint generated by the proposed method and
their true-value images are shown in Fig.16. The re-
sults show that the proposed method is effective even
with the actual multimodal filter, since it can be con-
firmed that the images generated are close to the true-
value images.
The RMSE values averaged 9.6, confirming that
the estimation accuracy is lower than in the color fil-
ter simulation experiment. However, the estimation
accuracy in the real environment experiment is ex-
pected to improve by attaching a multimodal filter
with a more ideal shape.
Table 2: Evaluation of the proposed method by RMSE.
Modality of the image RMSE
Red 9.448
Green 10.015
Brue 9.752
5 CONCLUSION
In this paper, we propose a method for acquiring mul-
timodal images based on unsupervised learning using
an LF camera and exterior filters. This method is ex-
pected to have a wide range of applications because it
is easy to switch acquisition modalities according to
the purpose and does not require any training data.
REFERENCES
Ho, K., Gilbert, A., Jin, H., and Collomosse, J. (2021). Neu-
ral architecture search for deep image prior. Comput-
ers & Graphics, 98:188–196.
Horstmeyer, R., Euliss, G., Athale, R., and Levoy, M.
(2009). Flexible multimodal camera using a light field
architecture. 2009 IEEE International Conference on
Computational Photography, ICCP 09, pages 1 – 8.
Luo, Y., Ren, J. S. J., Lin, M., Pang, J., Sun, W., Li, H., and
Lin, L. (2018). Single view stereo matching. CoRR,
abs/1803.02612.
Ng, R., Levoy, M., Br
´
edif, M., Duval, G., Horowitz, M., and
Hanrahan, P. (2005). Light Field Photography with a
Hand-held Plenoptic Camera. Research Report CSTR
2005-02, Stanford university.
Rasti, B., Koirala, B., Scheunders, P., and Ghamisi, P.
(2022). Undip: Hyperspectral unmixing using deep
image prior. IEEE Transactions on Geoscience and
Remote Sensing, 60:1–15.
Ulyanov, D., Vedaldi, A., and Lempitsky, V. S. (2017).
Deep image prior. CoRR, abs/1711.10925.
Xie, Q., Zhou, M., Zhao, Q., Meng, D., Zuo, W., and Xu, Z.
(2019). Multispectral and hyperspectral image fusion
by MS/HS fusion net. CoRR, abs/1901.03281.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
490
