
Reflecting on the Status Quo of Nonverbal Human-Machine Interaction
F
´
abio Barros
1,2 a
, Ant
´
onio Teixeira
1,2,3
and Samuel Silva
1,2,3
1
DETI – Department of Electronics, Telecommunications and Informatics, University of Aveiro, Aveiro, Portugal
2
IEETA – Institute of Electronics Engineering and Informatics of Aveiro, University of Aveiro, Aveiro, Portugal
3
LASI – Intelligent Systems Associate Laboratory, Aveiro, Portugal
Keywords:
Nonverbal Communication, Human-Computer Interaction, Multimodal Interaction.
Abstract:
Among humans, speech plays a central role in providing a form of communication that is efficient and natural.
But communication goes beyond the verbal component harnessing a wide range of nonverbal aspects ranging
from how words are said to posture, gestures, and facial movements. These, can complement or reinforce the
message increasing the adaptiveness of our communication abilities to different contexts, a desirable charac-
teristic to also have in our interaction with machines. Nevertheless, nonverbal communication cues are still
scarcely considered for human-machine interaction not only motivated by the complexity of understanding
and tackling them, but also by difficulties in translating them into a broader range of scenarios. In this context,
this article examines the current state of research on nonverbal interaction and reflects on the challenges that
need to be addressed in a multidisciplinary effort to advance the field.
1 INTRODUCTION
Communication is a very important process among
humans, since it enables interaction to exchange ideas
and experiences. In this context, speech is our most
direct and natural channel of communication, but the
communication process is often enriched by a set of
nonverbal contributions. Body posture, face expres-
sion, voice intonation, appearance, touch, distance
and, time are some of nonverbal features that establish
multiple channels that humans also use to communi-
cate and interact with others (de Gelder et al., 2015).
It is this diversity of choices that makes human-
human communication so efficient, natural and adap-
tive, in a wide variety of contexts.
In a world where interaction between users and
machines is ubiquitous and continues to grow, at a
fast pace, it is necessary to respond with innovative
systems that can embrace the users’ needs as well as
new attractive methods of interaction that can reach
different audiences. In the past few years, speech has
been widely considered for interaction with smart en-
vironments, boosted by the advances in several sup-
porting technologies, with special attention to conver-
sational assistants, such as Google Assistant, Siri or
Alexa (Seaborn et al., 2021).
a
https://orcid.org/0000-0001-8392-6922
The adoption of conversational assistants poten-
tially provides addressing the complexity of the en-
vironment by transforming many of the interactions
with it in a conversation moving away from more
tangible or graphical interfaces, for some purposes.
This brings users closer to a context that resembles
human-human communication creating expectations
on how systems will understand them along the way.
Additionally, from the interactive system’s perspec-
tive, every additional information that can be gathered
to better establish the user’s intentions, disambiguate
content, or provide increased levels of adaptiveness is
important. In this regard, the consideration of non-
verbal communication channels can potentially fos-
ter a greater level of naturalness and efficiency and
move the interaction further towards an increasingly
human-centred perspective (Guzman, 2018).
The research on considering multiple forms of in-
teraction with machines has travelled a long way, but
while the literature already addresses, to different ex-
tents, some nonverbal cues (e.g., for gestures or fa-
cial cues), several challenges still remain concerning
not only the evolution of the base technology, but also
how to support their integration in novel systems. In
this regard, this article looks into the overall research
devoted to tackling interaction with a focus on sup-
porting nonverbal channels and reflects on the chal-
lenges it needs to address to make nonverbal aspects
344
Barros, F., Teixeira, A. and Silva, S.
Reflecting on the Status Quo of Nonverbal Human-Machine Interaction.
DOI: 10.5220/0011798200003414
In Proceedings of the 16th International Joint Conference on Biomedical Engineering Systems and Technologies (BIOSTEC 2023) - Volume 4: BIOSIGNALS, pages 344-350
ISBN: 978-989-758-631-6; ISSN: 2184-4305
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
a more pervasive feature considered during human-
machine interaction. These challenges highlight a
range of research opportunities that should mobi-
lize a multidisciplinary community including behav-
ioral sciences, human activity processing and analy-
sis, software engineering, and human-machine inter-
action. To this end, the remainder of this article is or-
ganized as follows: section 2 briefly reviews human-
human communication broadly identifying relevant
nonverbal channels; section 3 takes on the identi-
fied channels and overviews current trends regarding
nonverbal cues in interaction identifying major chal-
lenges for its wider consideration; section 4 takes on
the identified challenges and proposes a set of routes
to follow towards advancing the topic; finally, sec-
tion 5 presents the overall conclusions.
2 THE MULTIMODAL NATURE
OF HUMAN COMMUNICATION
Since birth, humans use their physical abilities and
behavior, such as sounds, movements, or expressions
to communicate with others and exchange ideas and
experiences. Communication becomes something
natural to perform but it is not a simple process given
that humans use a plethora of nonverbal contribu-
tions that play a pivotal role in conveying a message,
providing redundant or complementary information,
and, sometimes, being the message itself. Addition-
ally, nonverbal aspects can support backchannel cues,
keeping the communication channel open and provid-
ing a confirmation to the speaker that it is being lis-
tened (Mueller et al., 2015).
Verbal communication can be defined as a form
of interaction through the use of words, or messages
in linguistic form (oral, written communication and,
also, sign language) while the nonverbal communica-
tion is a process of generating meaning using behav-
ior other than words (Chandler and Munday, 2011;
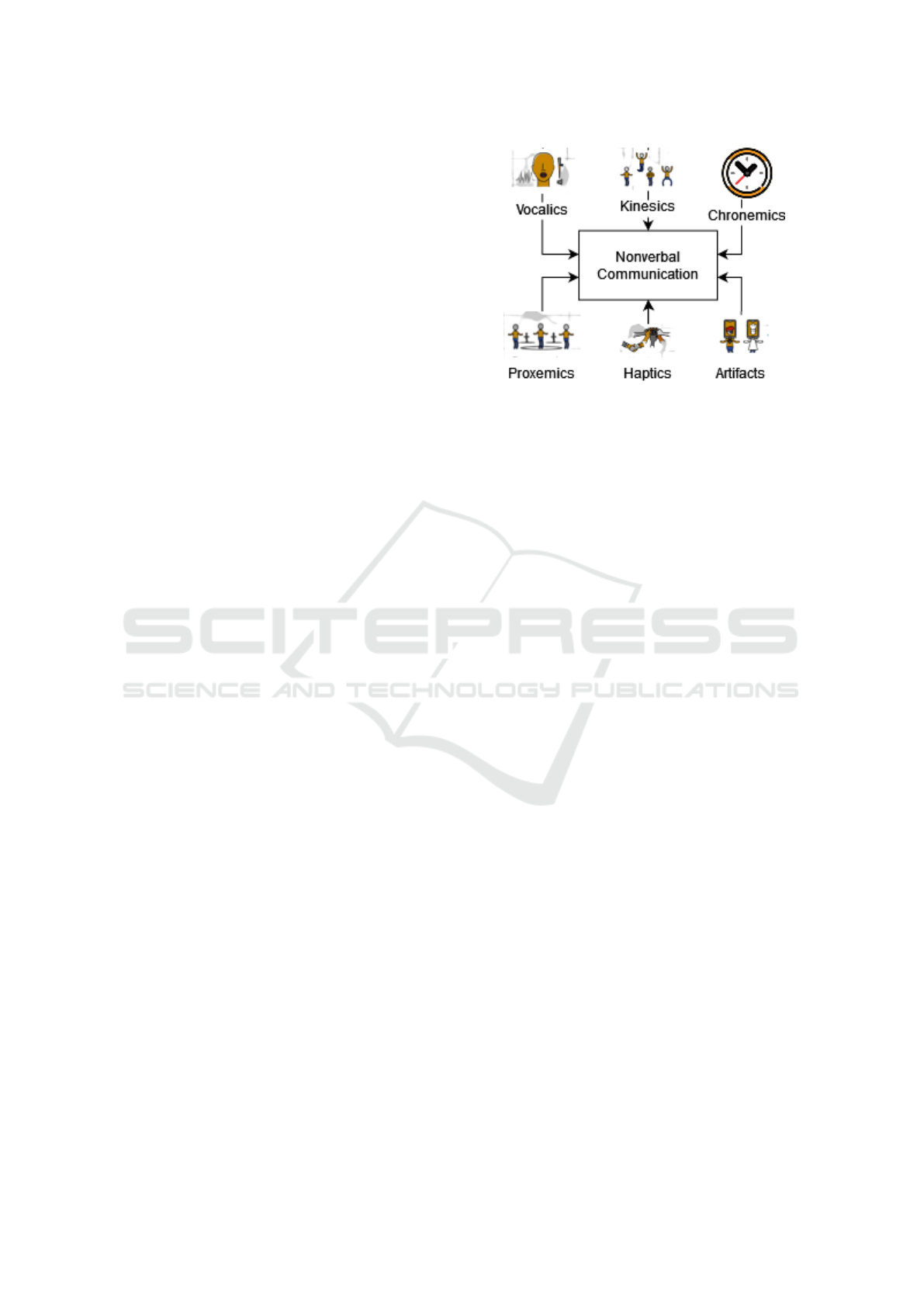
Andersen, 2008). Additionally, the literature adopts
a systematic way to define the different components
according to the communication channel distributing
them over a set of different groups of codes: Kinesics,
Vocalics, Proxemics and Haptics, Chronemics, and
Artifacts (Steinberg, 2007) (figure 1), standing for vi-
sual, auditory, contact, time, and place characteristics
respectively. These codes are explained, in more de-
tail, in what follows.
Kinesics — Kinesics concerns the interpretation of
body motion in communication through facial expres-
sions, gestures, eyes, body posture, i.e. pertaining the
behaviors that are related to movement of any part of
the body or the body as a whole (Key, 1975).
Figure 1: Multiple codes of nonverbal communication.
Vocalics – Vocalics or Paralanguage encompasses
nonverbal communication that is related to the vocal-
ized but nonverbal part of a message. This includes
several characteristics, such as speaking rate, pitch,
volume, tone of voice, and vocal quality (Rankin
et al., 2009). These aspects reinforce the meaning of
verbal communication, allow us to emphasize partic-
ular parts of a message or, in some cases, contradict
the verbal message (e.g., by giving an ironic tone to
what is said).
Haptics and Proxemics – Haptics refers to touch be-
haviors that convey meaning during interactions, i.e.,
how the strength, placement and duration of touch can
be used to communicate aspects such as empathy or
power. On the other hand, Proxemics refers to the use
of space and distance within communication. Prox-
emics also studies territoriality, or how people take
up and defend personal space during an interaction
between human and environments (Hans and Hans,
2015).
Chronemics – Chronemics refers to how time af-
fects communication and includes how different time
cycles affect our interaction with other human be-
ings (Pirjol and Ionesc, 2019). Naturally, time can
influence communication, for instance, deriving from
our daily schedules and availability, but what mostly
interests us, in this regard, is how time is a compo-
nent of communication and how it informs how the
message is interpreted. Interesting components, in
this regard, pertain, e.g., how much time people are
willing to listen, the time taken to respond, and the
amount of time someone speaks.
Artifacts – Artifacts are related to the environment
serving as scenario for the interaction. For example,
a comfortable chair can help facilitate interactions be-
tween a therapist and a patient or lighting and sound
can help set the tone of the communication. While
a person can have an active role in setting certain ar-
tifacts as context for the communication, it is often
Reflecting on the Status Quo of Nonverbal Human-Machine Interaction
345

something that does not result from explicit action, as
with the other codes. For instance, a darker room may
elicit a softer voice tone (Fatt, 1998).
3 NONVERBAL
HUMAN-COMPUTER
INTERACTION
The interaction between humans and machines is part
of our everyday life, creating a demand for more nat-
ural and efficient ways of interaction as well as more
user friendly systems (Bachmann et al., 2018) for
which nonverbal communication can play a key role.
The codes described in the previous section provide
a reference for what to look for when trying to ad-
dress nonverbal communication for interactive sys-
tems. In what follows we look into the literature to
understand the extent to which they are being consid-
ered for human-machine interaction and discuss the
challenges that are potentially hindering its advances.
3.1 Nonverbal Interaction
The literature gathered in this section does not aim
to be a comprehensive account of all works pertain-
ing nonverbal interaction. Considering the nature of
the proposed reflection, the goal is to provide recent
or otherwise notable references that enable an overall
idea about what nonverbal aspects are being covered,
to what extent, what are the overall approaches to do
it, and how they are being integrated in interactive
systems. In this regard, it is important to distinguish
two important stages of the research: 1) how the tech-
nology supports the core aspects, e.g., detecting ges-
tures; and 2) how it harnesses it to address nonverbal
communication. So, while the first is important to un-
derstand the overall capabilities of the existing tech-
nology, providing an important context, here, we are
mostly aiming for greater insight on the latter. Addi-
tionally, we are focusing on the machine perspective,
i.e., how they might be able to tackle the use of non-
verbal channels by humans and not how they might
use nonverbal communication to convey a message
(e.g., through an avatar).
Speech – Speech has gained prominence given the
massive emergence of conversational agents, social
robots and chatbots with the rich nature of speech
serving various contexts (e.g., smart homes (Seaborn
et al., 2021)). The nonverbal aspects of speech have
received a strong attention from the community in ap-
plication scenarios directly or indirectly related to in-
teraction, e.g., speech therapy (Cassano et al., 2022),
speech emotion recognition (Huang et al., 2019),
speaker verification/identification, and the detection
of language, age, and gender (Atmaja et al., 2022),
among others.
Gestures – Interaction with gestures is, perhaps,
along with speech, a communication channel that has
been strongly explored in human-machine interac-
tion. Although it is valuable to look at how litera-
ture approaches gesture recognition, in general, it is
important to note that most of the works (e.g., robot
control and interaction (Gao et al., 2021), interac-
tion with home devices (Kshirsagar et al., 2020)) are
based in pre-established gestures that are assigned a
meaning or action. For nonverbal interaction we are
mostly interested in gestures that are naturally associ-
ated with a meaning, e.g., assigned by culture or so-
cial contexts (e.g., making a gesture for ”no”), and
convey a message during communication. Addition-
ally, systems proposed for sign language, such as for
American Sign Language, belong to verbal commu-
nication (Islam et al., 2018).
Gaze and Head Posture – Two nonverbal contribu-
tions that are considered, regarding kinesics, are head-
pose and gaze. These two are closely related and
are usually jointly explored for recognizing the fo-
cus of attention of the users (something we do, e.g.,
to identify to whom we are speaking, in a group) and
also communicative acts such as interest or attentive-
ness. These aspects enable natural and ”hands-busy”
approaches and allow non-invasive interaction (Chen
et al., 2019; Brammi et al., 2020). The application ar-
eas for this form of nonverbal interaction include the
detection of drivers’ focus of attention (Naqvi et al.,
2018), studying natural interactions in multi-person
communication (M
¨
uller et al., 2018) and, even, in
healthcare scenarios (Luo et al., 2021).
Facial Expressions and Cues – The human face also
plays an important role in many aspects of verbal
and nonverbal interaction. In terms of interaction,
the human face does not only involve the expression
of facial emotions, a topic that is increasingly ex-
plored, but also human communicative acts such as
eye winking or eyebrow raising (Lyons and Bartneck,
2006). Nevertheless, the integration of this nonverbal
channel has not been much considered even though
its potential advantages are widely recognized (Wim-
mer et al., 2008). The involuntary nature of micro-
expressions, for instance, can inform a context for in-
ferring, e.g., the veracity of what is being said (Oh
et al., 2018; Xia et al., 2019). Additionally, there
are also works that focus their research on recognition
and detection of expressions using the FACS system
as rational (Baltrusaitis et al., 2018).
Environment Artifacts – The environment also af-
BIOSIGNALS 2023 - 16th International Conference on Bio-inspired Systems and Signal Processing
346

fects how our nonverbal communication unfolds
while it adapts to the communicative needs, e.g., cir-
cumventing communication barriers. For example, if
we are in a large or noisy room trying to interact with
a conversational agent which is far away from us, we
raise our tone of voice or go close to it. In this regard,
an understanding of these aspects may help as a con-
text for the communication. Notable examples might
be the adaptation to conversation distance (Weisser
et al., 2021) or the consideration of the very arrange-
ment of objects in a physical space as context to inter-
action systems if, for example, an artefact is an inter-
action partner (Stephanidis et al., 2019).
Multimodality and Nonverbal Cues – Between hu-
mans, communication is often multimodal and may
consider several nonverbal aspects (e.g., speech, ges-
tures, facial expressions) articulated during the inter-
action. This same concept has also emerged in in-
teraction with machines through the use of multiple
inputs, to provide more robust interaction (Rafael,
2021; Xie et al., 2021). In fact, interaction research
has profited from the adoption of multiple modali-
ties of interaction in order to make interaction be-
tween humans and systems more efficient and also
much more attractive by combining some nonverbal
cues, e.g., gaze and gestures (Kim et al., 2019), ges-
tures and speech (Yongda et al., 2018), gaze and
facial expressions (Su et al., 2021), focus and ges-
tures (Aftab et al., 2021), and speech, facial cues, and
gestures (Strazdas et al., 2022).
3.2 Discussion
By considering the panorama provided by the
overviewed literature there are a few aspects that can
be identified as challenges for a more pervasive pres-
ence of a wide range of nonverbal communication ca-
pabilities in human-computer interaction.
Limited Coverage of Nonverbal Channels – The di-
versity of communication channels, verbal and non-
verbal, is what makes human-human so efficient and
adaptive, in a wide variety of contexts and the body
of work for this topic shows contributions in adopting
a few forms of nonverbal communication towards a
potentially more natural interaction between humans
and machines. However, the literature still explores
only a small range of those features, mostly providing
works on nonverbal interaction considering gestures
or voice cues.
Tightly Coupled Solutions Hindering Reuse –
While these works make important contributions to
advance the technology and inform further research,
they typically target a specific purpose or application.
While having a well defined scenario can be important
to focus and evaluate the research, this often yields
tightly coupled approaches to the proposed methods
– i.e., with interaction developed as part of the core of
the applications – meaning that third parties that want
to apply them to other scenarios will have to mostly
implement them and master all the technologies in-
volved. Overall, this affects how these features can
reach a broader set of systems and how cumulative
improvement can occur.
Sparce Exploration of Nonverbal Synergies – Ad-
ditionally, what makes human-to-human communi-
cation so efficient, diverse, and even more complex
is the way nonverbal aspects are fused with verbal
and other nonverbal aspects during the interaction be-
tween humans. While the literature shows the adop-
tion of multiple channels in interaction scenarios us-
ing voice with gestures or gaze and gestures, for ex-
ample, this exploration is limited to just a few codes
and does not yet include some of the richness that
can arise from the redundancy or complementarity be-
tween the verbal and nonverbal aspects of commu-
nication. These limitations also stem from the fact
that their implementation across multiple channels is
somewhat complicated in itself and requires knowl-
edge of the implicit and explicit dynamics of these
aspects motivating approaches that often address lim-
ited tasks for specific contexts.
Scarcity of Datasets – Finally, the creation of so-
phisticated methods for interaction often relies on the
amount and quality of data available, e.g., to train
models to recognize particular actions. However, data
for nonverbal cues is scarce and most work relies on
limited sets of data that are costly to obtain, mostly
result from isolated efforts, and are not available to
the community. In addition, existing data-sets are of-
ten hard to expand due to difficulties in adding data
that is acquired in a manner that is coherent with the
data-set properties (e.g., environment lighting, point-
of-view). Furthermore, defining what data might in-
form the design and development of these methods
is not trivial and often requires complex acquisition
protocols entailing, for instance, methods and tasks to
elicit nonverbal cues, during communication.
4 EVOLVING NONVERBAL
INTERACTION
Interaction with verbal and non-verbal communica-
tion signals can foster increased naturalness and ef-
ficiency to our interaction with smart ecosystems.
However, their potential is still behind some chal-
lenges that need to be addressed. In this regard, this
section conceptualizes the different aspects that need
Reflecting on the Status Quo of Nonverbal Human-Machine Interaction
347

to be tackled moving from the challenges previously
identified into a roadmap for future research.
4.1 Vision
Nowadays, interactive systems are increasingly multi-
modal, so the approach to supporting nonverbal com-
munication cues would profit from embracing current
evolutions on this matter. Noteworthy, in this scope,
is the proposal of standards by the World Wide Web
Consortium (W3C) for multimodal interactive archi-
tectures (Dahl, 2013), as well as, frameworks and ar-
chitectures that implement them (e.g., (Almeida et al.,
2019)). These architectures approach multimodality
considering a decoupled design with each modality
existing independently from the applications. Such
characteristic should help move nonverbal interaction
research into easier reuse and refinement in a variety
of new scenarios. By not having to master the tech-
nologies and complexities for each of these modali-
ties, a range of new developers may integrate them,
in their works, as off-the-shelf modules. This is akin
to the concept of generic modalities, i.e., modalities
that are part of the framework supporting the mul-
timodal architecture over which applications can be
developed. For instance, considering a smart home,
nonverbal interaction features would not be integrated
in applications, but as part of the home infrastructure
dealing with interaction and to which the applications
would connect.
All these things considered, figure 2 depicts the
overall modules of an interactive system serving as
grounds to this vision. Nonverbal interaction modal-
ities connect to an interaction manager – the core of
the multimodal architecture (e.g., see (Almeida et al.,
2019)) – along with other modalities and applica-
tions. While this would already address a part of the
challenges identified earlier – regarding coupling and
reuse – , it mostly serves as the laying grounds for the
routes of action argued in what follows.
4.2 Roadmap
The evolution of nonverbal interaction provides a
plethora of research opportunities regarding not only
their integration as part of human-machine interac-
tion, but also the evolution of the underlying technolo-
gies for processing and analysing a set of multimodal
biological data for human behavior. In line with the
vision presented above, and in order to advance the
technologies and integration of nonverbal interaction
in smart ecosystems, several routes need to be taken:
• Expand the range of nonverbal cues that is
considered for interaction – This entails the de-
velopment and evolution of sensing, processing,
and analysis methods to detect nonverbal commu-
nicative actions from humans along with their de-
ployment as generic modalities encapsulating the
complexity of the methods and enabling the con-
sideration of verbal and nonverbal aspects for in-
teraction, off-the-shelf. For instance, regarding
vocalics, the research on the nonverbal aspects of
speech is very strong, but its consideration on in-
teractive systems has yet to fully harness it.
• Advance the exploration of synergies among
verbal and nonverbal communication – Along
with exploring more nonverbal communicative
cues, exploring how they work together, e.g., with
speech, would help unravel their full potential for
a more natural and adaptive interaction. The fu-
sion engine in figure 2 alludes to precisely this as-
pect, with a wide range of opportunities open to
explore different levels of fusion (e.g., feature or
semantic level) and unimodal/multimodal models
to optimize the outcomes based on the available
data, at each time. Additionally, aspects such as
proxemics might help build a context – hence the
reference to it, in the figure – for the interaction,
e.g., establishing the system as a focus of the mes-
sage.
• Create novel datasets for nonverbal interaction
– There is no denying that nonverbal communica-
tion can entail complex (or subtle) action or be-
havior. In this domain the exploration of the dif-
ferent communication channels would profit on
data that can provide, in a first instance, grounds
for a basic understanding of the communicative
role of different cues, and allow building and test-
ing methods to serve their detection. In this re-
gard, having a systematic approach to the data
collection that might allow multi-site acquisition
or later expansion (e.g., detailing a protocol and
acquisition conditions) would potentially allow
larger datasets. The datasets can also boost the
contributions by a wider range of researchers.
• Embrace a stronger drive for multidisci-
plinary approaches – The task of building novel
datasets and understanding nonverbal communi-
cation would strongly profit from a multidisci-
plinary approach to define what aspects are rele-
vant, how they can be elicited for collection, what
sensors are adequate, and what processing and
analysis is required for the different communica-
tion codes.
• Place emphasis on scenario-driven research –
A multidisciplinary setting should also contribute
to a better understanding of the communication
BIOSIGNALS 2023 - 16th International Conference on Bio-inspired Systems and Signal Processing
348
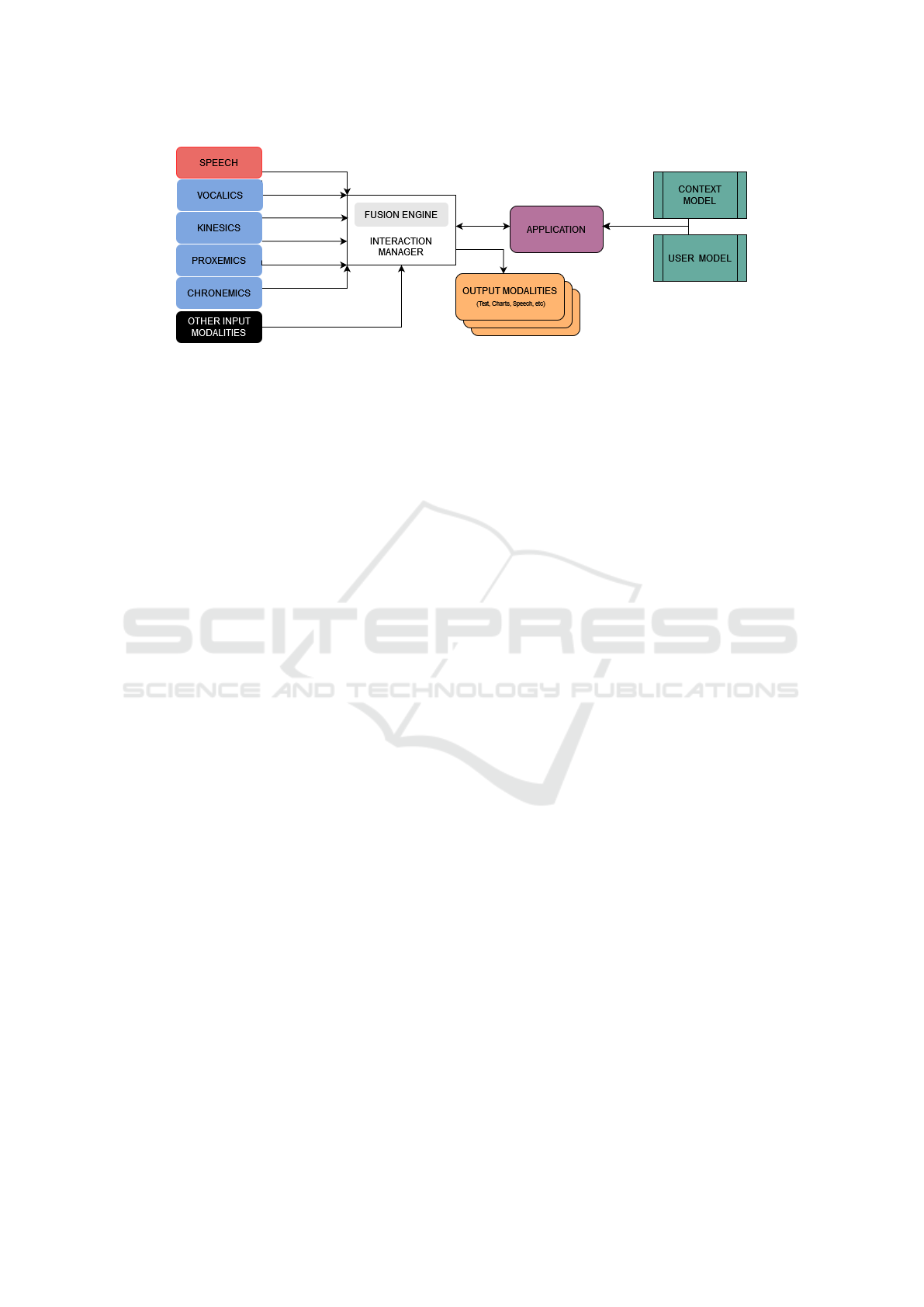
Figure 2: Diagram depicting the main modules of proposed vision for integration of nonverbal communication channels in
smart ecosystems.
phenomena in the definition of relevant and mean-
ingful scenarios, providing important clues to the
conceptualization of the solutions. And these
scenarios help to establish clear research objec-
tives informing the validation of the proposed ap-
proaches, potentially allowing the research out-
comes to be more focused and measurable. Fur-
thermore, the scenarios establish credible grounds
to define when and how to evaluate whether what
has been developed is useful, an overarching prin-
ciple that should not be forgotten.
5 CONCLUSIONS
The role of nonverbal communication cues in human-
human communication is indisputable and its consid-
eration for our interaction with machines could foster
an increasingly natural, efficient, and adaptive inter-
action. To this end, this article argues that several
challenges need to be tackled and proposes several
lines of action that, by also providing grounds for
discussion, may help raise awareness for the impor-
tance and range of multidisciplinary research oppor-
tunities that it entails. In this discussion we aimed for
how machines may profit from nonverbal communi-
cation cues, but the understanding of how humans do
it, to evolve these methods, can also be an important
route towards their use, as a communication channel,
by machines, e.g., through avatars in virtual environ-
ments (Aburumman et al., 2022).
REFERENCES
Aburumman, N., Gillies, M., Ward, J. A., and Hamilton,
A. F. d. C. (2022). Nonverbal communication in vir-
tual reality: Nodding as a social signal in virtual inter-
actions. International Journal of Human-Computer
Studies, 164:102819.
Aftab, A. R., von der Beeck, M., Rohrhirsch, S., Diotte, B.,
and Feld, M. (2021). Multimodal fusion using deep
learning applied to driver’s referencing of outside-
vehicle objects. arXiv preprint arXiv:2107.12167.
Almeida, N., Teixeira, A., Silva, S., and Ketsmur, M.
(2019). The am4i architecture and framework for mul-
timodal interaction and its application to smart envi-
ronments. Sensors, 19(11):2587.
Andersen, P. (2008). Nonverbal Communication: Forms
and Functions. Waveland Press Incorporated.
Atmaja, B. T., Sasou, A., and Akagi, M. (2022). Survey
on bimodal speech emotion recognition from acoustic
and linguistic information fusion. Speech Comm.
Bachmann, D., Weichert, F., and Rinkenauer, G. (2018).
Review of three-dimensional human-computer inter-
action with focus on the leap motion controller. Sen-
sors, 18(7):2194.
Baltrusaitis, T., Zadeh, A., Lim, Y. C., and Morency, L.-
P. (2018). Openface 2.0: Facial behavior analysis
toolkit. In 2018 13th IEEE international conference
on automatic face & gesture recognition (FG 2018),
pages 59–66. IEEE.
Brammi, J., Rb, D., Tb, P., and Rb, A. (2020). HCI based
input device for differently abled. Intelligent Systems
and Computer Technology, 37:304.
Cassano, F., Pagano, A., and Piccinno, A. (2022). Support-
ing speech therapies at (smart) home through voice
assistance. In International Symposium on Ambient
Intelligence, pages 105–113. Springer.
Chandler, D. and Munday, R. (2011). Verbal communica-
tion.
Chen, W., Cui, X., Zheng, J., Zhang, J., Chen, S., and
Yao, Y. (2019). Gaze gestures and their applications
in human-computer interaction with a head-mounted
display. arXiv preprint arXiv:1910.07428.
Dahl, D. A. (2013). The w3c multimodal architecture and
interfaces standard. Journal on Multimodal User In-
terfaces, 7(3):171–182.
de Gelder, B., De Borst, A., and Watson, R. (2015). The
perception of emotion in body expressions. Wiley In-
terdisc. Rev.: Cognitive Science, 6(2):149–158.
Fatt, J. P. T. (1998). Nonverbal communication and business
success. Management Research News.
Reflecting on the Status Quo of Nonverbal Human-Machine Interaction
349

Gao, Q., Chen, Y., Ju, Z., and Liang, Y. (2021). Dynamic
hand gesture recognition based on 3d hand pose esti-
mation for human-robot interaction. IEEE Sensors.
Guzman, A. L. (2018). Human-Machine Communication.
Peter Lang, Bern, Switzerland.
Hans, A. and Hans, E. (2015). Kinesics, haptics and prox-
emics: Aspects of non-verbal communication. IOSR
Journal of Humanities and Social Science (IOSR-
JHSS), 20(2):47–52.
Huang, K.-Y., Wu, C.-H., Hong, Q.-B., Su, M.-H., and
Chen, Y.-H. (2019). Speech emotion recognition us-
ing deep neural network considering verbal and non-
verbal speech sounds. In ICASSP 2019-2019 IEEE In-
ternational Conference on Acoustics, Speech and Sig-
nal Processing (ICASSP), pages 5866–5870. IEEE.
Islam, M. R., Mitu, U. K., Bhuiyan, R. A., and Shin, J.
(2018). Hand gesture feature extraction using deep
convolutional neural network for recognizing ameri-
can sign language. In 4th Int. Conf. on Frontiers of
Signal Processing (ICFSP), pages 115–119.
Key, M. R. (1975). Paralanguage and kinesics (nonverbal
communication).
Kim, J.-H., Choi, S.-J., and Jeong, J.-W. (2019). Watch
& do: A smart iot interaction system with object de-
tection and gaze estimation. IEEE Transactions on
Consumer Electronics, 65(2):195–204.
Kshirsagar, S., Sachdev, S., Singh, N., Tiwari, A., and Sahu,
S. (2020). Iot enabled gesture-controlled home au-
tomation for disabled and elderly. In 2020 Fourth In-
ternational Conference on Computing Methodologies
and Communication (ICCMC), pages 821–826. IEEE.
Luo, W., Cao, J., Ishikawa, K., and Ju, D. (2021). A
human-computer control system based on intelligent
recognition of eye movements and its application in
wheelchair driving. Multimodal Technologies and In-
teraction, 5(9):50.
Lyons, M. J. and Bartneck, C. (2006). HCI and the face.
In CHI’06 Extended Abstracts on Human Factors in
Computing Systems, pages 1671–1674.
Mueller, M., Leuschner, D., Briem, L., Schmidt, M., Kil-
gour, K., Stueker, S., and Waibel, A. (2015). Us-
ing neural networks for data-driven backchannel pre-
diction: A survey on input features and training
techniques. In International conference on human-
computer interaction, pages 329–340. Springer.
M
¨
uller, P., Huang, M. X., Zhang, X., and Bulling, A.
(2018). Robust eye contact detection in natural
multi-person interactions using gaze and speaking be-
haviour. In Proceedings of the 2018 ACM Symposium
on Eye Tracking Research & Applications, pages 1–
10.
Naqvi, R. A., Arsalan, M., Batchuluun, G., Yoon, H. S., and
Park, K. R. (2018). Deep learning-based gaze detec-
tion system for automobile drivers using a nir camera
sensor. Sensors, 18(2):456.
Oh, Y.-H., See, J., Le Ngo, A. C., Phan, R. C.-W., and
Baskaran, V. M. (2018). A survey of automatic fa-
cial micro-expression analysis: databases, methods,
and challenges. Frontiers in psychology, 9:1128.
Pirjol, F. and Ionesc, D.-E. (2019). Communication,
chronemics, silence.
Rafael, S. (2021). The contribution of early multimodal data
fusion for subjectivity in HCI. In 2021 16th Iberian
Conference on Information Systems and Technologies
(CISTI), pages 1–6. IEEE.
Rankin, K. P., Salazar, A., Gorno-Tempini, M. L., Soll-
berger, M., Wilson, S. M., Pavlic, D., Stanley, C. M.,
Glenn, S., Weiner, M. W., and Miller, B. L. (2009).
Detecting sarcasm from paralinguistic cues: anatomic
and cognitive correlates in neurodegenerative disease.
Neuroimage, 47(4):2005–2015.
Seaborn, K., Miyake, N. P., Pennefather, P., and Otake-
Matsuura, M. (2021). Voice in human–agent inter-
action: A survey. ACM Computing Surveys (CSUR),
54(4):1–43.
Steinberg, S. (2007). An introduction to communication
studies. Juta and Company Ltd.
Stephanidis, C., Salvendy, G., Antona, M., Chen, J. Y.,
Dong, J., Duffy, V. G., Fang, X., Fidopiastis, C.,
Fragomeni, G., Fu, L. P., et al. (2019). Seven HCI
grand challenges. International Journal of Human–
Computer Interaction, 35(14):1229–1269.
Strazdas, D., Hintz, J., Khalifa, A., Abdelrahman, A. A.,
Hempel, T., and Al-Hamadi, A. (2022). Robot sys-
tem assistant (RoSA): Towards intuitive multi-modal
and multi-device human-robot interaction. Sensors,
22(3):923.
Su, Z., Zhang, X., Kimura, N., and Rekimoto, J. (2021).
Gaze+ lip: Rapid, precise and expressive interactions
combining gaze input and silent speech commands for
hands-free smart tv control. In ACM Symposium on
Eye Tracking Research and Applications, pages 1–6.
Weisser, A., Miles, K., Richardson, M. J., and Buchholz,
J. M. (2021). Conversational distance adaptation in
noise and its effect on signal-to-noise ratio in realistic
listening environments. The Journal of the Acoustical
Society of America, 149(4):2896–2907.
Wimmer, M., MacDonald, B. A., Jayamuni, D., and Yadav,
A. (2008). Facial expression recognition for human-
robot interaction–a prototype. In International Work-
shop on Robot Vision, pages 139–152. Springer.
Xia, Z., Hong, X., Gao, X., Feng, X., and Zhao, G. (2019).
Spatiotemporal recurrent convolutional networks for
recognizing spontaneous micro-expressions. IEEE
Transactions on Multimedia, 22(3):626–640.
Xie, B., Sidulova, M., and Park, C. H. (2021). Robust
multimodal emotion recognition from conversation
with transformer-based crossmodality fusion. Sen-
sors, 21(14):4913.
Yongda, D., Fang, L., and Huang, X. (2018). Research on
multimodal human-robot interaction based on speech
and gesture. Computers & Electrical Engineering,
72:443–454.
BIOSIGNALS 2023 - 16th International Conference on Bio-inspired Systems and Signal Processing
350
