
On the Hardness and Necessity of Supervised Concept Drift Detection
∗
Fabian Hinder
a
, Valerie Vaquet
b
, Johannes Brinkrolf
c
, and Barbara Hammer
d
CITEC, Bielefeld University, Inspiration 1, Bielefeld, Germany
Keywords:
Concept Drift, Stream Learning, Drift Detection, No Free Lunch.
Abstract:
The notion of concept drift refers to the phenomenon that the distribution generating the observed data changes
over time. If drift is present, machine learning models can become inaccurate and need adjustment. Many
technologies for learning with drift rely on the interleaved test-train error to detect drift and trigger model
updates. This type of drift detection is also used for monitoring systems aiming to detect anomalies. In this
work, we analyze the relationship between concept drift and change of loss on a theoretical level. We focus
on the sensitivity, specificity, and localization of change points in drift detection, putting an emphasize on the
detection of real concept drift. With this focus, we compare the supervised and unsupervised setups which are
already studied in the literature. We show that, unlike the unsupervised case, there is no universal supervised
drift detector and that the assumed correlation between model loss and concept drift is invalid. We support our
theoretical findings with empirical evidence for a combination of different models and data sets. We find that
many state-of-the-art supervised drift detection methods suffer from insufficient sensitivity and specificity, and
that unsupervised drift detection methods are a promising addition to existing supervised approaches.
1 INTRODUCTION
The world that surrounds us is undergoing constant
change, which also affects the increasing amount of
data sources available. Those changes – referred to as
concept drift – frequently occur when data is collected
over time, e.g., in social media, sensor networks, IoT
devices, etc., and are induced by several causes such
as seasonal changes, changed demands of individual
costumers, aging, or failure of sensors, etc. Drift in
the data usually requires some actions being taken to
ensure that systems are running smoothly. These can
be either actions taken by a person or by the learning
algorithm (Ditzler et al., 2015).
Understanding the nature and underlying structure
of drift is important as it allows the user to make in-
formed decisions (Webb et al., 2017) and technical
systems to perform desirable corrections (Vaquet et al.,
2022). Depending on the context, different actions
have to be taken. There are two main problem se-
tups: Autonomously running systems need to robustly
a
https://orcid.org/0000-0002-1199-4085
b
https://orcid.org/0000-0001-7659-857X
c
https://orcid.org/0000-0002-0032-7623
d
https://orcid.org/0000-0002-0935-5591
∗
We gratefully acknowledge funding by the BMBF
TiM, grant number 05M20PBA.
solve a given task in the presence of drift. In this set-
ting, the learning algorithm of online learners needs
knowledge about the drift to update the model in a
reasonable way (Ditzler et al., 2015). In contrast, in
system monitoring, the drift itself is of interest as it
might indicate that certain actions have to be taken.
Examples of such settings are cyber-security, where
a drift indicates a potential attack, and the monitor-
ing of critical infrastructures such as electric grids or
water distribution networks, where drift indicates leak-
ages or other failures (Eliades and Polycarpou, 2010).
While system monitoring can minimize the damage
caused by a malfunctioning technical system, and re-
duce wastage of resources, applying adaptive online
learners can increase revenue in case of changing con-
sumer behaviors and is key to robot navigation and
autonomous driving (Losing et al., 2015).
Although both problem setups are very different,
the majority of approaches rely on (supervised) drift
detection, where the drift is detected by analyzing
changes in the loss of online models. This is an intu-
itive step in the setting of (supervised) online learning
as the goal is to minimize the interleaved test-train er-
ror by triggering model updates when drift is detected.
In the monitoring scenario, detecting drift by refer-
ring to a stream learning setup is a commonly used
surrogate for the actual problem.
164
Hinder, F., Vaquet, V., Brinkrolf, J. and Hammer, B.
On the Hardness and Necessity of Supervised Concept Drift Detection.
DOI: 10.5220/0011797500003411
In Proceedings of the 12th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2023), pages 164-175
ISBN: 978-989-758-626-2; ISSN: 2184-4313
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

Considering stream learning in the presence of con-
cept drift, technologies commonly rely on windowing
techniques and adapt the model based on the charac-
teristics of the data in an observed time window. Such
methods rely on non-parametric methods and ensem-
ble technologies for (mostly supervised) online models.
Active methods explicitly detect drift, usually referring
to change of loss, and trigger model adaptation this
way, while passive methods continuously adjust the
model (Ditzler et al., 2015), hybrid approaches (Raab
et al., 2019) combine both approaches by continuously
adjusting the model unless drift is detected and a new
model is trained.
For many problems the precise pinpointing of the
timepoint of the drift event is mandatory to ensure an
optimal usage of the provided data: Only if we know
which samples were collected after the drift happened,
we can perform retraining or analysis in a consistent
way with respect to the current distribution. In ad-
dition to a precise pinpointing in time, a distinction
between virtual and real drift, i.e., non-stationarity of
the marginal distribution only or also the posterior,
can help to understand the dynamics of the drift and
inform consecutive steps.
The detection of drift, especially real drift is gener-
ally considered to be a hard problem (Hu et al., 2020).
Although many attempts were made to tackle the prob-
lem of constructing a general purpose detector for real
drift, it is still considered to be widely unsolved. Re-
cently theoretical results regarding the solubility were
published (Hinder et al., 2020, 2022) validating a large
class of common drift detection schemes from a the-
oretical perspective. However, those results focus on
drift detection in an unsupervised scenario only. To
the best of our knowledge, comparable results do not
exist for drift detection in a supervised setup, i.e., for
the detection of real drift.
The purpose of this contribution is to deepen the un-
derstanding of drift detection from a theoretical point
of view by analyzing the interconnection between con-
cept drift and learning algorithms. More precisely, we
consider the commonly assumed necessity of concept
drift detection for the validity of stream learning algo-
rithms (Gonçalves Jr et al., 2014; Gama et al., 2004,
2014) and, conversely, the applicability of commonly
applied drift detection schemes from stream learning
to concept drift detection as a statistical problem (Eli-
ades and Polycarpou, 2010), as is common practice
for monitoring problems. In particular, we analyze the
implications of our results for monitoring setups and
stream learning tasks. This includes advice for practi-
cal applications and an impossibility result regarding
universal supervised drift detection.
As a result, we can answer the following questions
in the context of supervised drift detection, i.e., vir-
tual and real drift, which suggest several important
corollaries regarding the possibility and interconnec-
tion of supervised and unsupervised drift detection and
the connection between system monitoring and stream
learning:
1. Can we detect the drift (sensitivity)?
Only if we do not miss drifts we can ensure robust
monitoring and reliable model updates.
2. Can we be sure about the detection (specificity)?
False alarms can be costly in monitoring appli-
cations and trigger unwanted updates in online
learning which might be harmful for the model’s
performance.
3.
Can we determine the timepoint of the drift (local-
ization precision)?
Large detection delays pose risks in monitoring
tasks and delay the update of online learners.
This paper is organized as follows: First (Section 2)
we recall the basic notions of statistical learning the-
ory and concept drift followed by reviewing the ex-
isting literature, mainly focusing on drift detection.
We proceed with a theoretical analysis starting with
a precise mathematical formalization of the notions
of real and virtual drift and the analysis thereof (Sec-
tion 3.2), followed by an analysis of the suitability of
stream learners for drift detection (Section 3.3). After-
ward, we empirically quantify the theoretical findings
(Section 4) and conclude with a summary (Section 5).
2 PROBLEM SETUP, NOTATION,
AND RELATED WORK
We make use of the formal framework for concept drift
as introduced by Hinder et al. (2020, 2019) as well as
classical statistical learning theory, e.g., as presented
by Shalev-Shwartz and Ben-David (2014). In this
section, we recall the basic notions of both subjects
followed by a summary of the related work on concept
drift detection schemes focusing on a high-level point
of view.
2.1 Basic Notions of Statistical Learning
Theory
In classical learning theory, one considers a hypothesis
class
H
, e.g., a set of functions from
R
d
to
R
, together
with a non-negative loss function
ℓ : H × (X × Y ) →
R
≥0
that is used to evaluate how well a model
h
matches an observation
(x,y) ∈ X ×Y
by assigning an
error
ℓ(h,(x,y))
. We will refer to
X
as the data space
On the Hardness and Necessity of Supervised Concept Drift Detection
165

and
Y
as the label space. For a given distribution
D
on
X ×Y
we consider
X
- and
Y
-valued random variables
X
and
Y
,
(X,Y ) ∼ D
, and assign the loss
L
D
(h) =
E[ℓ(h,(X,Y ))]
to a model
h ∈ H
. Using a data sample
S ∈ ∪
N∈N
(X × Y )
N
consisting of i.i.d. random vari-
ables
S = ((X
1
,Y
1
),...,(X
n
,Y
n
))
distributed according
to
D
, we can approximate
L
D
(h)
using the empirical
loss
L
S
(h) =
1
n
∑
n
i=1
ℓ(h,(X
i
,Y
i
))
, which converges to
L
D
(h)
almost surely. Popular loss functions are the
mean squared error
ℓ(h,(x,y)) = (h(x) − y)
2
, cross-
entropy
ℓ(h,(x,y)) = −
∑
n
i=1
1
[y = i]log(h(i | x))
, or
the 0-1-loss ℓ(h,(x,y)) = 1[h(x) ̸= y].
In machine learning, training a model often refers
to minimizing the loss
L
D
(h)
using the empirical loss
L
S
(h)
as a proxy. A learning algorithm
A
, such as
gradient descent schemes, selects a model
h
given a
sample
S
, i.e.,
A : ∪
N
(X × Y )
N
→ H
. Classical learn-
ing theory investigates under which circumstances
A
is consistent, that is, it selects a good model with high
probability:
L
D
(A(S)) → inf
h
∗
∈H
L
D
(h
∗
)
as
|S| → ∞
in probability. Since the model
A(S)
is biased towards
the loss
L
S
due to training, classical approaches aim
for uniform bounds
sup
h∈H
|L
S
(h) − L
D
(h)| → 0
as
|S| → ∞ in probability.
2.2
A Statistical Framework for Concept
Drift
The classical setup of learning theory assumes a time-
invariant distribution
D
for all
(X
i
,Y
i
)
. This assump-
tion is violated in many real-world applications, in
particular, when learning on data streams. Therefore,
we incorporate time into our considerations by means
of an index set
T
, representing time, and a collection
of (possibly different) distributions
D
t
on
X × Y
, in-
dexed over
T
(Gama et al., 2014). In particular, the
model
h
and its loss also become time-dependent. It
is possible to extend this setup to a general statistical
interdependence of data and time via a distribution
D
on
T × (X × Y )
which decomposes into a distribu-
tion
P
T
on
T
and the conditional distributions
D
t
on
X × Y
, the tuple
(D
t
,P
T
)
is called a (supervised) drift
process (Hinder et al., 2020, 2019). Our main example
is binary classification on a time interval, i.e.,
X = R
d
,
Y = {0, 1}, and T = [0,1].
Drift refers to the fact that
D
t
varies for different
timepoints, i.e.,
{(t
0
,t
1
) ∈ T
2
: D
t
0
̸= D
t
1
}
has mea-
sure larger zero w.r.t
P
2
T
(Hinder et al., 2020). One fur-
ther distinguishes a change of the posterior
D
t
(Y | X)
,
referred to as real drift, and of the marginal
D
t
(X)
,
referred to as virtual drift. One of the key findings
of Hinder et al. (2020) is a unique characterization of
the presence of drift by the property of statistical de-
pendency of time
T
and data
(X,Y )
if a time-enriched
representation of the data
(T, X ,Y ) ∼ D
is considered.
The task of determining whether or not there is drift
during a time period is called drift detection. Fol-
lowing the terminology in learning tasks, we will re-
fer to the detection of real drift, i.e., of the posterior
D
t
(Y | X)
only, as supervised and (virtual) drift, i.e., in
the marginal
D
t
(X)
or the joint distribution
D
t
(X,Y )
(mathematically those are the same), as unsupervised
drift detection. We say that a drift detector is univer-
sal if it is capable of raising correct alarms with a
high probability independent of the distribution(s) in
the stream, assuming a sufficient amount of data is
provided.
In this work, we will consider data drawn from
a single drift process, thus we will make use of the
following short-hand notation
L
t
(h) := L
D
t
(h)
for a
timepoint
t ∈ T
and
L(h) := L
D(X ,Y )
(h)
is the loss on
the entire stream.
2.3 Related Work and Existing Methods
There is only little work on learning theory for drift
detection. What is known about learning theory in the
context of drift is concerned with learning guarantees
in stream learning, or learning of statistical processes
and time series analysis (Mohri and Muñoz Medina,
2012; Hanneke et al., 2015). To the best of our knowl-
edge, there is no other strain of work that deals with
the question at hand in comparable generality or setup.
In the following, we will give a survey of the lit-
erature on drift detection methods from a high-level
point of view. As pointed out by Lu et al. (2018);
Hinder et al. (2022), basically all drift detection meth-
ods, independent of whether they are applied in the
stream learning or monitoring setup, supervised or un-
supervised, are essentially based on comparing time
windows. The respective samples might be stored di-
rectly or implicitly in a descriptive statistic or machine
learning model (Hinder et al., 2022). Also, such steps
can be performed several times, e.g., ADWIN (Bifet
and Gavaldà, 2007) first stores a reference window in
a model which is then applied to the incoming data
resulting in a stream of losses which is then analyzed
using an auto-cut statistic on a sliding window. There
are also hierarchical and ensemble approaches, that
combine several drift detectors. This leads to a large
variety of methods, but it does not change principle crit-
icism, as such methods inherit the principle strengths
and weaknesses of the internally used methods.
Formally, one can consider drift detectors as a kind
of statistical test that aims to differentiate between the
null hypothesis “for all timepoints
t
and
s
we have
D
t
= D
s
” and the alternative “we may find timepoints
t
and
s
with
D
t
̸= D
s
”. It can be shown that it is suf-
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
166

ficient to consider the distribution before and after a
timepoint
t
, for any distribution and type of drift, as
is implicitly assumed by many drift detectors (Hinder
et al., 2019). In this sense, unsupervised drift detection
can be considered as a sequence of two sample tests
applied to a stream. This implies that we need very
strong statistics in order to deal with the multi-testing
problem. Supervised drift detection on the other hand
is similar to conditional independence testing, as we
will see in Theorem 1. This implies that every su-
pervised drift detector induces an unsupervised drift
detector, but not the other way around.
One way to obtain strong statistics for both scenar-
ios is to rely on machine learning models and their loss
as surrogates, as already mentioned above. The main
advantage of this approach is that we only need to
check for the change in the mean of a one-dimensional
random variable, i.e., the empirical loss. Furthermore,
we can apply such approaches in the supervised, e.g.,
by using the accuracy of a classifier (Page, 1954; Bifet
and Gavaldà, 2007; Gama et al., 2004; Frías-Blanco
et al., 2015; Baena-García et al., 2006; Gonçalves Jr
et al., 2014), and unsupervised setup, e.g., by using the
negative log-likelihood of a density estimator or virtual
classifiers (Gretton et al., 2006; Gözüaçık et al., 2019;
Bu et al., 2016). Thus, such methods can easily be
adjusted to the data by using model selection. Further-
more, if we are actually interested in using this model,
as is the case for active methods in stream learning,
the relevance of this approach becomes obvious.
3 A THEORETICAL ANALYSIS
We will now consider real drift and supervised drift
detection from a theoretical perspective. We will start
by recalling the already established knowledge of un-
supervised drift detection. Then, we provide a precise
formal definition of the notions of real and virtual drift.
We proceed by analyzing those to derive equal formu-
lations comparable to those presented by Hinder et al.
(2020). In particular, we analyze the interconnection of
real drift and drift of the joint distribution and thereby
supervised and unsupervised drift detection (Corol-
lary 1) which will allow us to answer Questions 3. We
then analyze the interconnection of drift and learning:
We show that the effect of drift heavily depends on
the precise setup including both the drift and the hy-
pothesis class – which also answers Question 1 and 2.
In particular, we will show that for many common
learning models, the connection between model loss,
optimal model, and type of drift is rather vague (Theo-
rem 3). This implies that many supervised drift detec-
tion algorithms that rely on model loss to detect drift
are only well suited if the hypothesis class and the drift
match. As a consequence, we can conclude that there
is no general purpose, i.e., universal, supervised drift
detector.
3.1 Unsupervised Drift Detection
Let us first recapitulate the main results from the un-
supervised drift detection scenario which has affirma-
tively been solved in the literature.
Definition 1. An unsupervised drift detector is a deci-
sion algorithm on data-time-pairs of any sample size
n
, i.e.,
A : ∪
N∈N
(T × X )
N
→ {0,1}
. A drift detector
A is valid on a set of drift processes D, iff
limsup
n→∞
sup
D
t
∈D
D
t
has no drift
P
S∼D
n
[A(S) = 1]
< inf
D
t
∈D
D
t
has drift
limsup
n→∞
P
S∼D
n
[A(S) = 1].
We say that A is universal if it is valid for all possible
streams, i.e., D is the set of all drift processes.
It was shown that unsupervised drift detection,
without a specification of a change point, is equivalent
to independence testing (Hinder et al., 2020) for which
well-known and good performing tests exist – this an-
swers Questions 1 and 2 positive in a general setup. If
we also want to know the change points, we can con-
sider the problem as a kind of bi-clustering problem
which is learnable in many cases (Hinder et al., 2022).
This approach is very general and one can turn nearly
every binary classifier into a drift detector that, as sam-
ple size goes to infinity, has arbitrary high sensitivity,
specificity, and precision regarding the change point
localization – also answering Question 3 positive in a
general setup. To summarize: There exists a universal
unsupervised drift detector and we can answer all three
research questions positive.
3.2 Supervised Concept Drift Detection
as a Statistical Problem
To consider the case of supervised drift detection we
first need a precise formalization of real and virtual
drift: The notion of virtual drift, a change of the dis-
tribution of
X
, is just drift of the marginal distribution
and thus can easily be adapted in the framework of
Hinder et al. (2020). To extend the notion of real drift,
i.e., the fact that the classification rule
x 7→ y
changes
over time, to the probabilistic setup, we have to be a
bit more careful as
D
t
(Y | X = x) ̸= D
s
(Y | X = x)
On the Hardness and Necessity of Supervised Concept Drift Detection
167

only implies real drift if we can actually observe
x
at
both timepoints
t
and
s
, i.e.,
D
t
(X = x), D
s
(X = x) > 0
,
otherwise this statement is meaningless. Furthermore,
it is not clear how to compare the two distributions,
as conditioning on a non-finite space requires heavy
mathematical machinery and will in general not result
in a probability measure, let alone a unique one. In-
stead, we will focus on derived statistics, i.e., bounded
functions
f : X × Y → R
, and whether they are af-
fected by the drift. One of the main examples of such
statistics that is of interest for us is the loss of a given,
fixed model, i.e.,
ℓ(h,·) : X × Y → R
, which essen-
tially considers the change of model loss if confronted
with drift. To obtain a quantitative measure of drift
from
f
, we proceed as follows: First, we consider
the conditional expectation given data and time but
no label which is a function of data and time, i.e., we
consider
E[ f (X,Y ) | X,T ] : X × T → R.
If the distribution of
Y | X
does not change with time
then this function is
T
invariant. The idea is now to
measure this invariance: This can be done by compar-
ing
E[ f (X,Y ) | X,T ]
to the best possible approxima-
tion of it that depends on
X
only. Using the
L
2
-norm
we obtain
inf
g∈L
2
(D(X ))
∥E[ f (X,Y ) | X,T ] − g(X )∥
L
2
(D(T,X))
,
which is known to be just the conditional expecta-
tion given
X
, i.e.,
g(X) = E[E[ f (X,Y ) | X,T ] | X ] =
E[ f (X,Y ) | X ]
. This allows us to express the last equa-
tion in terms of conditional variation:
E
X∼D(X)
[Var(E[ f (X,Y ) | X,T ] | X )].
This is zero if and only if we can estimate the statistic
without referring to
T
, i.e., if it is
T
invariant, and thus
leads to the following definition:
Definition 2. Let
(D
t
,P
T
)
be a supervised drift pro-
cess, i.e., a Markov kernel
D
t
from
T
to
X × Y
to-
gether with a probability measure
P
T
on
T
. We say
that
D
t
has virtual drift iff the marginal on
X
has drift
in the usual sense, i.e., if
(D
t
(X),P
T
)
has drift. We
say that
D
t
has real drift iff there is a time varying
statistic, i.e., i.e.,
∃ f : E[Var(E[ f (X,Y ) | X,T ] | X)] > 0.
We say that
D
t
has virtual/real drift only iff it has
virtual/real drift but no real/virtual drift.
The notions of supervised drift detector, validity,
and universality are analogous to the unsupervised
case except that we consider real drift in the definition
of validity.
Note that this is a slight variation from the usual
nomenclature where real/virtual drift refers to the sit-
uation we call real/virtual drift only. Indeed, if
D
t
has no virtual drift, then our definition coincides with
the usual definition (see Lu et al., 2018). However,
to analyze the change of the posterior
Y | X
and the
distribution of
X
at the same time, such a definition is
necessary.
As our definition of real drift is rather complicated,
we will continue by providing equivalent formalization
comparable to Hinder et al. (2020):
Theorem 1. Let
D
t
be a supervised drift process. The
following are equivalent
1. D
t
has no real drift
2.
For any statistic, points for which it
varies in time are not observed, i.e.,
sup
f
D
X
[Var(E[ f (X,Y ) | X, T ] | X) ̸= 0] = 0.
3.
Every statistic admits a time-invariant prediction,
i.e., for all bounded
f : X × Y → R
there exists a
g : X → R such that E[ f (X,Y ) | X, T ] = g(X).
4.
There is no (conditional) dependency drift (Hinder
et al., 2020): If
(X,Y,T ) ∼ D
then
T
and
Y
are
conditionally independent given
X
, i.e.,
Y ⊥⊥ T | X
.
Proof.
“1
⇒
4”: Let
A ⊂ Y
and consider
f (x,y) =
I
A
(y). Then we have
0 ≥ E[Var(E[ f (X,Y ) | X, T ] | X)]
= ∥P
Y |X,T
(A) − P
Y |X
(A)∥
2
L
2
(D(T,X))
.
This is the case for all A if and only if Y ⊥⊥ T | X.
“4
⇒
3”: If
Y ⊥⊥ T | X
then
E[ f (X,Y ) |
X,T ] = E[ f (X ,Y ) | X]
, so we may choose
g(X) = E[ f (X ,Y ) | X].
“3
⇒
1”: Since
E[ f (X,Y ) | X ]
is the (according
to
L
2
) best possible approximation of
E[ f (X,Y ) | X,T ]
that depends on
X
only and
E[ f (X,Y ) | X, T ] = g(X)
,
which depends on
X
only, we have
E[ f (X,Y ) | X ,T ] =
g(X) = E[ f (X ,Y ) | X] and therefore the variance is 0.
“2
⇔
1”: Consider
V
f
(x) = Var(E[ f (X,Y ) |
X,T ] | X = x)
which is a non-negative, measurable
function of
x
. Then it holds
P[V
f
(X) > 0] = 0 ⇔
E[V
f
(X)] = 0
and the supremum is 0 if and only if
all f result in 0.
Notice that the notion of virtual and real drift are
together equivalent to drift on the joint distribution of
(X,Y ). Formally we have:
Corollary 1. A supervised drift process
D
t
has drift if
and only if D
t
has virtual or real drift.
Proof.
We show that there is no drift if and only if
there is no virtual and no real drift. Using Theorem 1
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
168

and (Hinder et al., 2020, Theorem 3) it follows by
contraction that
Y ⊥⊥ T | X
| {z }
no real drift
and X ⊥⊥ T
| {z }
no virtual drift
⇒ X,Y ⊥⊥ T
| {z }
no (dependency) drift
.
For the other direction, by weak union and decomposi-
tion, it follows
X,Y ⊥⊥ T
| {z }
no (dependency) drift
⇒ Y ⊥⊥ T | X
| {z }
no real drift
and
X,Y ⊥⊥ T
| {z }
no (dependency) drift
⇒ X ⊥⊥ T
| {z }
no virtual drift
.
Which completes the proof.
This corollary is important as it answers our Ques-
tion 3, i.e., change point localization, by allowing us to
carry over the result from unsupervised drift detection
to the supervised setup by considering the joint distri-
bution. The main challenge is thus to assure specificity
in the supervised setup.
Practically, this means that we can always make
use of unsupervised drift detection to identify potential
change points and then double check using a suitable
test. It is therefore reasonable that we focus on the
case where T is finite.
Checking for real drift in such a setup can be done
by comparing the optimal model that respects the ad-
ditional temporal information, i.e., may change over
time, with the time-independent one. We will refer
to the types of drift that affect models as model drift.
This consideration leads to the following setup which
relates the loss of optimal models and drift:
Definition 3. Let
T
be finite,
D
t
a supervised drift
process, and
H
a hypothesis class with loss
ℓ
. We call
the following the detection equation:
E
inf
h
∗
∈H
L
T
(h
∗
)
≤ inf
h
∗
∈H
L(h
∗
).
Iff the inequality is strict, H has model drift.
The detection equation can be motivated by The-
orem 1.3 which implies that we can replace the time-
dependent model with a time-independent model if and
only if there is no real drift, assuming a sufficiently
large hypothesis class. It can be shown that there is
actually a deep connection between model drift and
real drift, as is shown by the following result:
Theorem 2. Let
Y = {0,1}
,
X = R
d
,
T
be fi-
nite, and
H
be universal, i.e.,
H
are measurable,
bounded functions
h : X → R
and for every continuous
f : X → R
with compact support and
ε > 0
, there exists
a
h
∗
∈ H
such that
sup
x∈X
|h
∗
(x) − f (x)| < ε
. Then
there is real drift if and only if
H
with MSE-loss has
model drift.
Proof.
Since the MSE decomposes into
E[(h(X) −
E[Y | X])
2
]
and
E[Var(Y | X)]
and the second part does
not depend on
h
, we can subtract it from both sides of
the detection equation, which then becomes
E
inf
h
∗
∈H
E[(h
∗
(X) − E[Y | X, T ])
2
| T ]
≤ inf
h
∗
∈H
E[(h
∗
(X) − E[Y | X, T ])
2
].
As
H
is dense in
L
2
the left-hand side is 0 and, using
Theorem 1.3, the right-hand side is 0 if and only if
there is no real drift.
This result is promising as it shows that, at least
in theory, supervised drift detection is possible. In
the next section, we will consider the problem from a
statistical point of view, i.e., in the case where we are
provided with a finite amount of data only.
3.3
On the Hardness of Supervised Drift
Detection
So far we have seen that many results from the unsuper-
vised statistical problem setup carry over to supervised
drift detection and model drift. In this section, we will
consider the mismatch between the setups, particularly,
the mismatch between model drift and supervised drift
detection. To do so, we consider an unspecified sta-
tistical test that probes for real drift by checking for
model drift as a proxy, i.e., it uses model loss as a pre-
processing. According to the two types of error of the
statistical test, we consider two types of mismatches:
Definition 4. Let
D
t
be a drift process,
H
be a hy-
pothesis class with a loss function ℓ.
•
Mismatch of the first kind:
D
t
has real drift, but no
model drift.
•
Mismatch of the second kind:
D
t
has no real drift,
but model drift.
Notice that this definition reflects our research
questions in a formal way: If the sensitivity is high
then a mismatch of the first kind is unlikely. If the
specificity is high then a mismatch of the second kind
is unlikely. As we have already answered the question
of localization of change points using Corollary 1 to re-
duce the supervised problem to the unsupervised (Hin-
der et al., 2022), we will now focus on considering the
occurrence of mismatches.
In Theorem 2, we required that
H
is a rather large
hypothesis class. However, we cannot omit such an
assumption due to the fact that if the hypothesis class
is “small” it is certain to fail:
Theorem 3 (No free lunch). Let
H
be a hypothe-
sis class of binary classifiers with 0-1-loss of VC-
dimension
d < ∞
. For any
S ⊂ X
of size larger than
On the Hardness and Necessity of Supervised Concept Drift Detection
169

4(d + 1)
there is a mismatch of the first kind and if
d < log
2
|H |
there is a
S ⊂ X
of size not lager than
d + 1
with mismatch of the second kind, i.e., for any
choice of
T
and
P
T
(that is not concentrated on a sin-
gle point) there exists a drift process
D
t
on
S
without
noise, i.e.,
D
t
(Y = 1 | X ) ∈ {0, 1}
and
D
t
(X ∈ S) = 1
,
for which the mismatch occurs.
Proof.
Mismatch of the First Kind: Let
S ⊂ X
be a set of size
m > d + 1
. By Sauer’s lemma we
have
|H
|S
| ≤ (em/d)
d
, here
H
|S
denotes the restriction
of
H
onto
S
. Furthermore, there exist
2
m
labelings
f : S → {0,1}
but the loss of any
h ∈ H
can take
on at most
m + 1
values, i.e.,
{
∑
x∈S
1
[h(x) ̸= f (x)] |
h ∈ H } ⊂ {0,1,... , m}
. Thus, there exist at most
(em/d)
d
(m + 1)
different combinations of model and
loss. Therefore, if we assign each labeling to those
model(s) with the respective smallest error we end
up with assigning two labelings
f
1
̸= f
2
to the same
model h having the same loss, as the number of label-
ings grows faster with respect to
m
than the number of
model-loss combinations. Furthermore,
h
is the best
possible choice for
f
1
and
f
2
among all other models.
By using
f
1
to label the first and
f
2
to label the second
part of the stream, we end up with a stream with real
drift but neither the optimal model nor its loss change.
Let us now compute
m
. In order to apply Sauer’s
lemma and the counting argument we need to have
2
m
em
d
d
(m + 1)
> 1 m > d + 1,
where the
> 1
is sufficient because counts can only
take integers, so at least one instance must take the
value 2. Since
m
has to grow at least linearly with
respect to
d
in order to fulfill the second condition,
we will first determine a factor
v
such that
m = vd
is sufficient to fulfill the second property in the limit
d → ∞
. Since the first criterion takes on non-negative
values only, we can take the logarithm on both sides
(vlog(2) − log(v) − 1) − log(1+ dv)/d
| {z }
d→∞
−−−→0
> 0.
Since
vlog(2)
grows faster than
log(v) + 1
, all
v > v
0
fulfill the conditions, where
v
0
is the solution of
v
0
log(2) = log(v
0
)+ 1
with
v
0
> 1
(a numeric approx-
imation is
v
0
≈ 3.053
). To assure the first condition is
also fulfilled for finite
d
, we have to add a small factor
w
which depends on
v
and
d
. However, for a fixed
choice of
v
it is upper bounded, so that we may choose
m = vd + w.
For the choice
v, w = 4
, i.e.,
m = 4(d + 1)
we
obtain a first derivative
(4
2+d
(x/(e + ed))
x
(1 + (1 +
d)(5 + 4d)log((4d)/(e + ed))))/((1 + d)(5 + 4d)
2
)
which for the sake of setting
= 0
simplifies to
1 + (1 + d)(5 + 4d)log((4d)/(e + ed))
. This func-
tion is monotonously growing for
d ≥ 0
, negative
at
d = 1
and positive at
d = 2
. Thus, checking
2
4(d+1)
/((e4(d + 1)/d)
d
(4(d + 1) + 1)) > 1
suffices
for d = 1, 2, which holds true, indeed.
Mismatch of the Second Kind: Let
S
1
,S
2
⊂ X
be
disjoint sets that are shattered by
H
but
S := S
1
∪ S
2
is
not shattered by
H
, thus there exists a labeling
f : S →
{0,1}
with
f ̸∈ H
|S
but
f
|S
i
∈ H
|S
i
. Define
Y = f (X)
and put equal weight on those points and only those
points in
S
1
during the first half and analogous for
S
2
and the second half. Then there is virtual drift only and
also model drift. To see that
S
1
,S
2
exist, first choose
S
1
⊂ X
with size
d
, which exists because
H
has VC-
dimension
d
. Because
|H | > 2
|S
1
|
, there has to exist at
least one point
x ∈ X \ S
1
such that
2
1
≥ |H
|{x}
| > 1
.
Thus, the set
S
2
= {x}
is shattered by
H
,
S
1
and
S
2
are disjoint,
S = S
1
∪ S
2
has size
d + 1
and thus cannot
be shattered by H .
The proof is based on the idea that, since the model
complexity is bounded, the model either cannot dis-
tinguish enough points to notice the drift or cannot
match the entire posterior. Notice that the proof heav-
ily relies on the assumption of a finite VC-dimension
to construct the drift process. A possible justification
for this assumption is that it is necessary to control
the discrepancy between the detection equation and its
empirical counterpart as is needed for statistical tests.
An obvious question is whether the statement stays
true if we drop this assumption. However, similar find-
ings actually apply under mild assumptions and thus
in many real-world scenarios: As shown in Theorem 1,
supervised drift detection is equivalent to conditional
independence tests, a testing problem which in stark
contrast to (unconditional) independence is known to
not admit a non-trivial test with statistical power (Shah
and Peters, 2020).
Reconsidering the loss-based drift detectors, we
can predict four different outcomes: If the loss does
not change either (1a) there is no real drift, or (1b) the
models are not complex enough, e.g., because they are
over-regularized, to match the structure and smooth
out the drift. If the loss does change either (2a) there is
real drift, or (2b) the models are not complex enough
to match the entire structure at once. Notice that in
both problematic cases (b) there is an issue with the
model’s complexity. This is not surprising, as the proof
of Theorem 3 is based exactly on this idea. This idea
extends to arbitrary learning algorithms as those have
to make a trade-off between model complexity and
convergence which results in case (b), too.
This shows that the usually assumed connection
between real drift and change of model accuracy is not
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
170
valid for any learning model if we do not make any
assumption on the distribution. Thus, for supervised
drift detection there does not exist a universal super-
vised drift detector, in particular, not one that is based
on model loss. However, this is of course not true if
we restrict the set of all “allowed drift processes”. For
example: For Gaussian distributions, conditional inde-
pendence can be tested. Thus, we suggest selecting a
model class that is rich enough to learn all expected
distributions, but small enough to assure fast conver-
gence.
4 EMPIRICAL EVALUATION
In the following, we demonstrate our theoretical in-
sights in experimental setups and have a look at the
strength of these effects. In particular, we will show
that the mismatches actually occur in practical setups
and constitute a major concern in stream learning. To
do so, we conduct three different experiments: In the
first and the second experiment, the ability to detect
concept drift is evaluated; in the first experiment, a
simplified setup is used to accurately analyze the de-
tection behavior while in the second experiment, a
more realistic streaming setup is used where only the
timing of the drift is controlled. In the third experi-
ment, we evaluate the effect of false positive detection
on the performance of stream learners.
Notice that the methods considered here mainly
originate from a stream learning setup which is de-
signed to adapt to the drift, commonly measured by
interleaved test-train error, rather than to perform the
precise test.
All experiments are performed on the fol-
lowing standard synthetic benchmark datasets
AGRAWAL (Agrawal et al., 1993), MIXED (Gama
et al., 2004), RandomRBF (Montiel et al., 2018), Ran-
domTree (Montiel et al., 2018), SEA (Street and Kim,
2001), Sine (Gama et al., 2004), STAGGER (Gama
et al., 2004) and the following real-world benchmark
datasets “Electricity market prices” (Elec; Harries
et al., 1999), “Forest Covertype” (Forest; Blackard
et al., 1998), and “Nebraska Weather” (Weather;
Elwell and Polikar, 2011). To remove uncontrolled
effects caused by unknown drift in the real-world
datasets, we apply a permutation scheme (Hinder
et al., 2022) and induce real drift by a label switch. As
a result, all datasets have controlled real drift and no
virtual drift. We induce virtual drift by segmenting the
data space using random decision trees.
For comparability, all problems are turned into bi-
nary classification tasks. Class imbalance is controlled,
so it does not exceed
25%/75%
in ratio. This way we
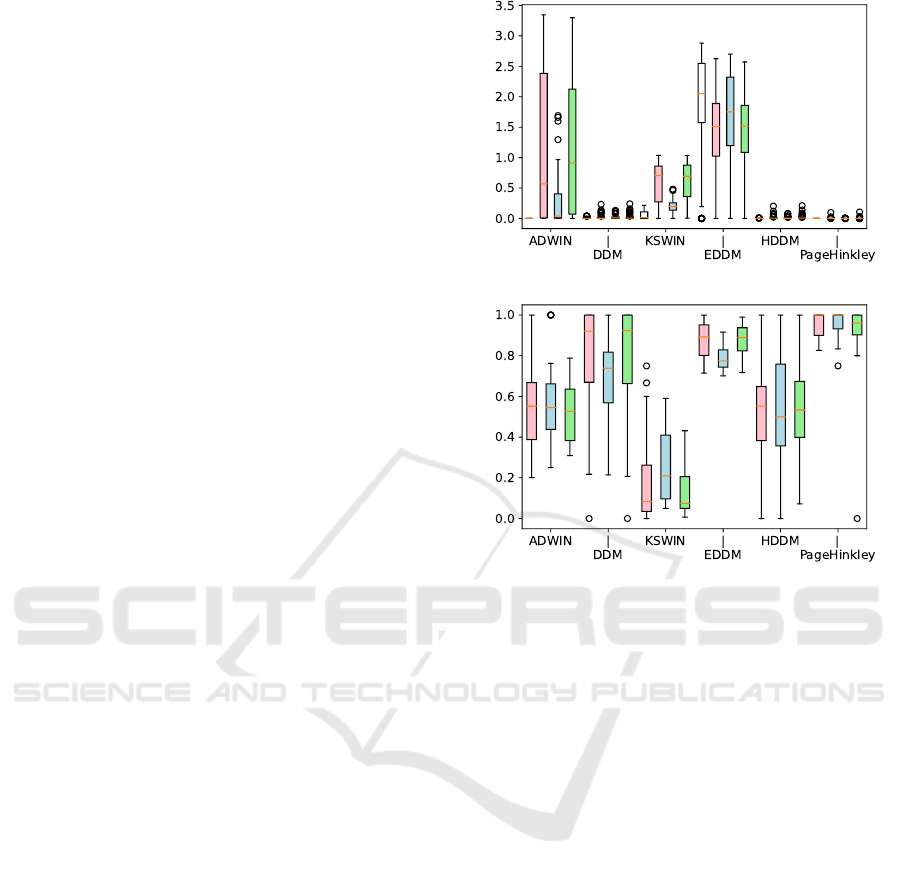
(a) Number of alarms
(b) False alarm rate
Figure 1: Evaluation of drift detection. In group order: no-
drift (plot (a) only; white), real drift (pink), virtual drift
(blue), real and virtual drift (green). Mean taken over dataset
and method before turned into a boxplot.
obtained
2 × 2
distributions with controlled drifting
behavior which we will refer to with the numbers
00
–
11, i.e., D
i j
(X,Y ) = D
i
(X)D
j
(Y | X).
Drift Detection in a Controlled Setup. In the first
experiment, we analyze the effect of the drift type, i.e.,
none, real, virtual, and both, on the number of detected
drifts and the true positive rate. From each distribution
we draw two independent samples
S
tr
i j
,S
te
i j
∼ D
i j
of size
200
for training and testing. We train one model on
each training set
S
tr
i j
and evaluate it on a stream which
is created by concatenating the test set
S
te
i j
with another
test set
S
te
kl
. If
i ̸= k
there is virtual drift, if
j ̸= l
there
is real drift.
We consider the following models: Decision Tree,
Random Forest,
k
-Nearest Neighbour, Bagging (with
Decision Tree), AdaBoost (with Decision Tree), Gaus-
sian Naïve Bayes, Perceptron, and linear SVM (Pe-
dregosa et al., 2011). The models are not modified,
i.e., no passive adaption, during the evaluation phase.
By evaluating the model on the stream we obtain
a stream of losses, i.e.,
s
i
=
1
[h(x
i
) ̸= y
i
]
, to which
we apply the drift detector and document the detected
On the Hardness and Necessity of Supervised Concept Drift Detection
171
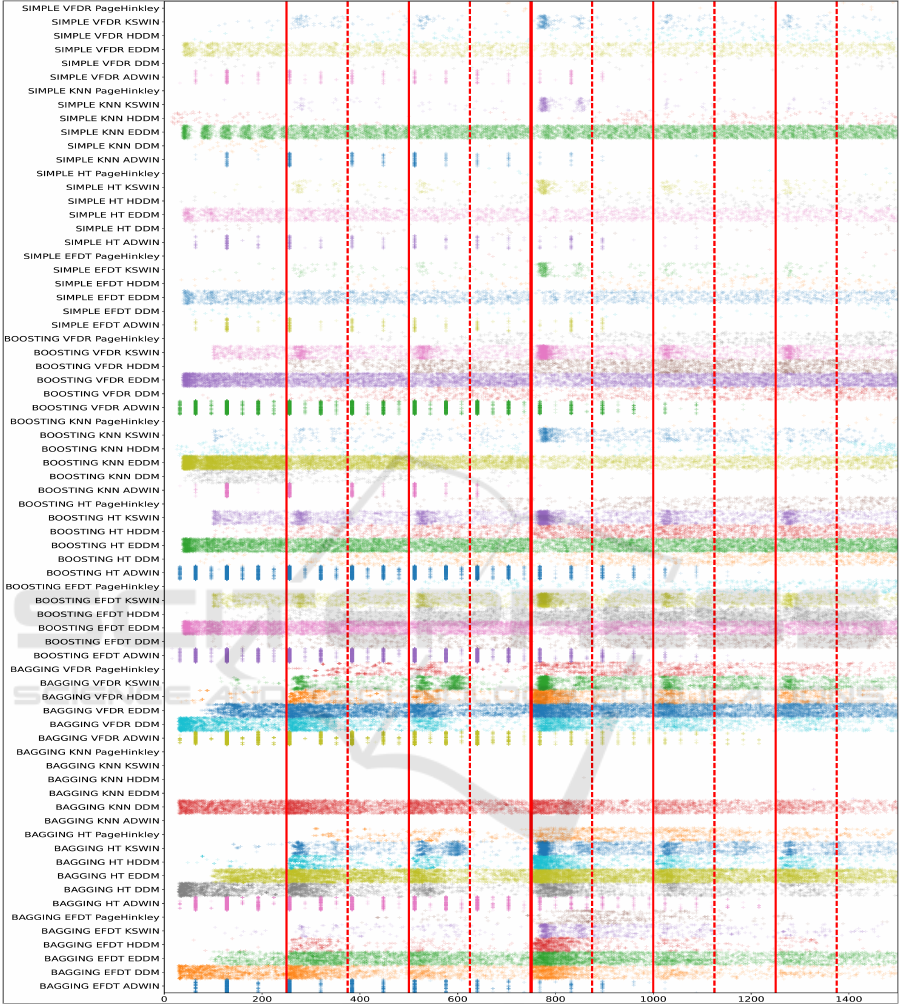
Figure 2: Evaluation of drift detection on Weather based data streams for different model/detector setups. Red lines mark
change points (thin: virtual drift, thick: real drift), and dashed lines mark the end of considered windows. Points mark found
drifts, x-axis shows timepoint/sample number in the stream of detection, y-axis shows setup and run.
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
172
Table 1: Mean F1-score (200 runs) of real drift detection.
Method Elec Forest RBF SEA STAGGER Weather
BAGGING HT HDDM 0.49±0.19 0.23±0.28 0.47±0.36 0.00±0.07 0.99± 0.09 0.48±0.21
KNN DDM 0.18±0.04 0.17±0.07 0.19±0.05 0.19±0.08 0.74± 0.22 0.18±0.05
BOOSTING EFDT KSWIN 0.24±0.06 0.15±0.14 0.28±0.12 0.10±0.22 0.81± 0.25 0.25±0.06
HT ADWIN 0.11±0.13 0.03±0.10 0.16±0.12 0.01±0.05 0.15± 0.18 0.15±0.12
KSWIN 0.23±0.05 0.20±0.16 0.26±0.10 0.11±0.25 0.86± 0.20 0.23±0.05
VFDR KSWIN 0.26±0.06 0.21±0.18 0.27±0.10 0.10±0.22 0.83± 0.20 0.24±0.05
SIMPLE VFDR ADWIN 0.17±0.25 0.01±0.10 0.11±0.23 0.00±0.00 0.52± 0.16 0.16±0.25
KSWIN 0.73±0.33 0.13±0.30 0.43±0.46 0.00±0.07 0.99± 0.10 0.52±0.36
ShapeDD (unsupervised) 0.36±0.25 0.29±0.23 0.45±0.14 0.35±0.08 0.49± 0.14 0.41±0.20
Table 2: Mean number of alerts in stream blocks (200 runs). In block ordering is non-drifting (max. 7), real drift (max. 1),
virtual drift (max. 4).
Method Elec Forest RBF SEA STAGGER Weather
BAGGING HT HDDM 1.03 0.98 1.46 1.06 0.48 1.58 0.56 0.72 0.90 0.01 0.00 0.01 0.02 1.00 0.00 0.88 0.92 1.62
KNN DDM 5.38 0.96 3.58 5.34 0.96 3.62 5.24 0.95 3.56 3.98 0.90 3.32 0.44 1.00 0.38 5.20 0.99 3.54
BOOSTING EFDT KSWIN 3.90 0.98 2.93 3.68 0.64 2.39 2.77 0.87 2.43 1.12 0.21 0.70 0.33 0.96 0.17 3.85 1.00 2.98
HT ADWIN 3.91 0.42 1.97 2.50 0.11 1.42 4.08 0.64 2.06 1.74 0.05 1.06 2.59 0.50 1.50 4.30 0.66 2.13
KSWIN 4.00 1.00 2.92 2.69 0.66 2.28 3.16 0.98 2.84 0.86 0.16 0.70 0.31 1.00 0.19 3.82 1.00 3.24
VFDR KSWIN 3.53 0.99 2.74 2.28 0.64 2.24 2.98 0.94 2.70 0.88 0.20 0.69 0.34 1.00 0.27 3.50 0.99 2.96
SIMPLE VFDR ADWIN 1.03 0.32 0.75 0.44 0.02 0.34 1.06 0.18 0.70 0.04 0.00 0.04 1.10 0.94 0.78 1.25 0.30 0.72
KSWIN 0.27 0.84 0.32 0.26 0.18 0.50 0.18 0.50 0.44 0.00 0.01 0.00 0.00 0.99 0.00 0.30 0.74 0.90
ShapeDD (unsupervised) 0.21 0.72 2.10 0.14 0.66 2.52 0.14 1.00 2.65 0.04 0.97 3.64 0.18 1.00 2.21 0.18 0.86 2.34
drifts. We consider the following drift detectors: AD-
WIN (Bifet and Gavaldà, 2007), DDM (Gama et al.,
2004), EDDM (Baena-García et al., 2006), HDDM-
A (Frías-Blanco et al., 2015), KSWIN (Raab et al.,
2019), and PageHinkley (Page, 1954).
We present the total number of found drift events
per run in Figure 1a and the rate of false alarms in Fig-
ure 1b, where we consider an alarm as a true positive
if it was observed during the first
125
samples after the
drift. If it was observed before, i.e., when train and test
distribution coincide, or with a very large delay, i.e.,
after more than 125 into the second part of the stream,
the detection is considered to be a false positive. We
allow multiple true positives per stream. If a stream
does not result in a single detection it is excluded from
the alarm rate analysis.
As can be seen, most of the methods do not yield
any alarms. The ones that do (ADWIN, KSWIN, and
EDDM) show strong variation in the false alarm rate,
where KSWIN outperforms the others in this regard.
Only with respect to the sensitivity in the case of vir-
tual drift, it is outperformed by EDDM due to the low
detection rate. Furthermore, virtual drift is harder to de-
tect than real which is harder than both. Additionally,
except for KSWIN, all methods show an extremely
high false alarm rate.
Drift Detection in a Streaming Setup. To evalu-
ate the decision capabilities in a more realistic setup,
we proceed as follows: We make use of standard, ac-
tive stream learning algorithms and document the time
when the internal drift detectors initiate a model re-
set. We consider both single model approaches (SIM-
PLE), where only a single model is used, and ensem-
ble approaches, including bagging (BAGGING) and
boosting (BOOSTING). We make use of the same
drift detectors as before and consider the following
models: Hoeffding Tree (HT; Bifet et al., 2010), Slid-
ing Window
k
-NN (KNN; Montiel et al., 2018), Ex-
tremely Fast Decision Trees (EFDT; Manapragada
et al., 2018), and Very Fast Decision Rules (VFDR;
Kosina and Gama, 2013). To verify our claim that
unsupervised drift detectors can help to identify the
change points, we also consider the Shape-based Drift
Detector (ShapeDD; Hinder et al., 2021).
We apply those methods to streams which are con-
structed as follows: Each stream consists of 6 blocks
consisting of 250 datapoints, each from a single dis-
tribution with drift between consecutive blocks. The
distributions are constructed as described above – each
stream is constructed based on a single dataset. Except
for the change from block 1 to 2 and 3 to 4, all blocks
have virtual drift only, from 1 to 2 there is no drift,
from 3 to 4 there is virtual and real drift.
We report the mean F1-score (Table 1) and the
On the Hardness and Necessity of Supervised Concept Drift Detection
173
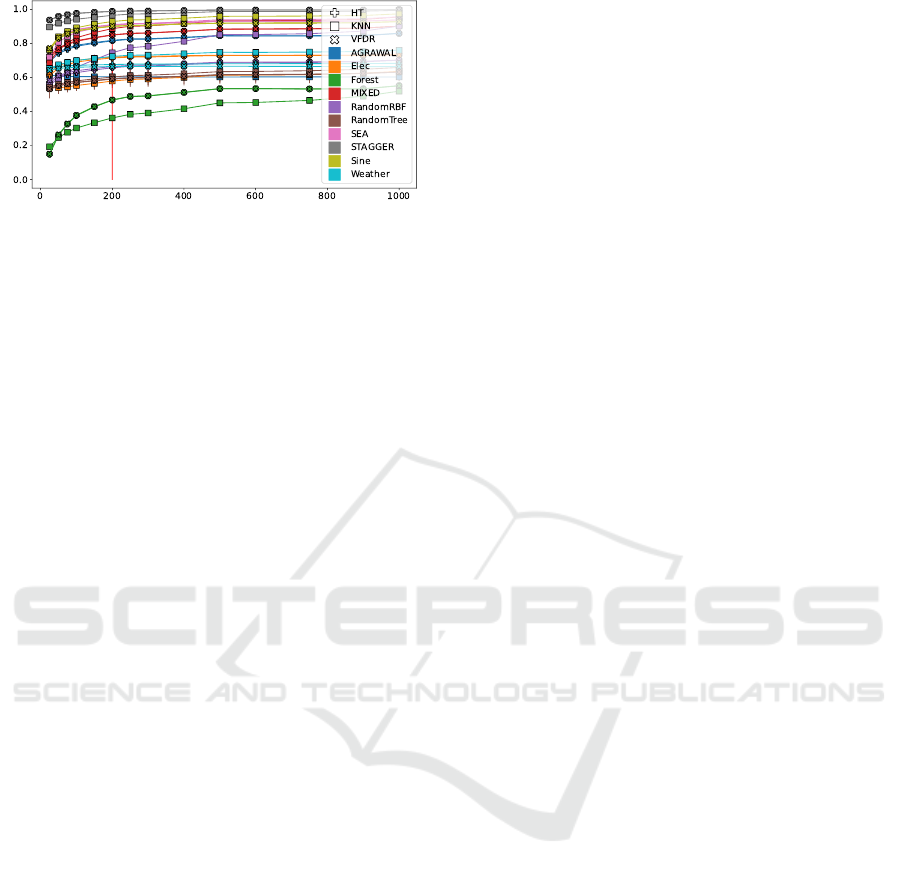
Figure 3: Effect of alarm rate on model accuracy.
x
-axes
shows reset frequency in samples between resets,
y
-axis
shows mean interleaved test-train accuracy over 200 runs.
mean number of alerts per drift type (Table 2) for a
selection of method combinations and ShapeDD. We
split each of the 6 blocks into a first and second half
and accumulate the detection in each half block. The
first half of the 4th block which corresponds to the
real drift is considered as a positive, all others are as
negatives. Furthermore, we visualized the results on
the stream based on the Weather dataset in Figure 2.
Considering Figure 2, it can be seen that many
drift detectors produce far too many alarms, which
fits the expectation of the first experiment. In some
cases, the found drifts seem to be nearly independent
of the actual drift events. Only KSWIN shows a solid
performance in all setups. Furthermore, the SIMPLE
setup produces far fewer drift events, which is to be
expected as they make use of a single drift detector
only. These results are confirmed on the additional
datasets. As one can see in Table 1, for most super-
vised drift detectors we observe low F1-scores. As
can be seen in Table 2, this is caused by high false
positive rates. Indeed, as can easily be seen, many
methods also detect drift in the non-drifting blocks.
In contrast, we observe that the unsupervised drift
detection method ShapeDD obtains comparably high
F1-scores even though false alarms are expected, i.e.,
in case of a perfect unsupervised detection the obtain
F1-score is
0.33
. Reconsidering Table 2, ShapeDD
usually shows the lowest number of detection in non-
drifting blocks. The only exceptions are SEA, where
the other methods with low non-drifting defections do
not detect anything, and STAGGER, which appears to
be a particularly simple dataset for all stream-learning
methods. This perfectly aligns with the theoretical con-
siderations (Corollary 1) and supports our proposal to
combine unsupervised drift detection with a suitable
statistical test to perform supervised drift detection
rather than a loss-based approach.
Effect of False Alarms on Performance. To study
the effect of many false alarms, we used the same
datasets as before to create streams of a length of
1,000
samples without drift. We apply Hoeffding Tree (Bifet
et al., 2010), Sliding Window
k
-NN (Montiel et al.,
2018), and Very Fast Decision Rules (Kosina and
Gama, 2013) to each of the streams, reset the model
after every
25
,
50
,
75
,
100
,
150
,
200
,
250
,
300
,
400
,
500
,
600
,
750
,
900
, and
1,000
samples, respectively,
to simulate different false alarm rates, and document
the interleaved test-train error. We repeat the process
200
times. The results are shown in Figure 3. As ex-
pected, mean accuracy grows anti-proportionally to
the number of resets (Spearman’s ρ, p < 0.001).
Also, observe that after 200 samples nearly all
methods reach a plateau which justifies the choice of
this sample size in the other experiments.
5 CONCLUSION
In this work, we considered the interconnection of
concept drift, statistical tests, and learning algorithms
from a theoretical point of view. We provided a gen-
eralized notion of real drift and showed that, other
than in the unsupervised setup, a universal supervised
drift detector cannot exist. Considering loss-based su-
pervised drift detection we found that the connection
between real drift and learning models is not valid if
we do not make assumptions about the distributions. In
particular, this approach is not suited for monitoring se-
tups. In our experimental evaluation, we demonstrated
that unsupervised drift detection constitutes a good
choice for this setting. When applying online learning
without additional knowledge guiding the choice of a
suitable model, considering drift detection on the joint
distribution might be a valuable option. Besides, we
found that updating the model very frequently due to
false alarms is decreasing the performance of online
learners. For practical applications, this indicates, that
one should carefully select a suitable model according
to the data.
REFERENCES
Agrawal, R., Imielinski, T., and Swami, A. N. (1993).
Database mining: A performance perspective. IEEE
Trans. Knowl. Data Eng., 5:914–925.
Baena-García, M., Campo-Ávila, J., Fidalgo-Merino, R.,
Bifet, A., Gavald, R., and Morales-Bueno, R. (2006).
Early drift detection method.
Bifet, A. and Gavaldà, R. (2007). Learning from time-
changing data with adaptive windowing. In Proceed-
ings of the Seventh SIAM International Conference on
Data Mining, April 26-28, 2007, Minneapolis, Min-
nesota, USA, pages 443–448.
Bifet, A., Holmes, G., Kirkby, R., Pfahringer, B., and Braun,
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
174

M. (2010). Moa: Massive online analysis. Journal of
Machine Learning Research 11: 1601-1604.
Blackard, J. A., Dean, D. J., and Anderson, C. W. (1998).
Covertype data set.
Bu, L., Alippi, C., and Zhao, D. (2016). A pdf-free change
detection test based on density difference estimation.
IEEE transactions on neural networks and learning
systems, 29(2):324–334.
Ditzler, G., Roveri, M., Alippi, C., and Polikar, R. (2015).
Learning in nonstationary environments: A survey.
IEEE Comp. Int. Mag., 10(4).
Eliades, D. G. and Polycarpou, M. M. (2010). A Fault
Diagnosis and Security Framework for Water Systems.
IEEE Transactions on Control Systems Technology,
18(6):1254–1265.
Elwell, R. and Polikar, R. (2011). Incremental learning of
concept drift in nonstationary environments. IEEE
Transactions on Neural Networks, 22(10):1517–1531.
Frías-Blanco, I., d. Campo-Ávila, J., Ramos-Jiménez, G.,
Morales-Bueno, R., Ortiz-Díaz, A., and Caballero-
Mota, Y. (2015). Online and non-parametric drift de-
tection methods based on hoeffding’s bounds. IEEE
Transactions on Knowledge and Data Engineering,
27(3):810–823.
Gama, J., Medas, P., Castillo, G., and Rodrigues, P. P. (2004).
Learning with drift detection. In Advances in Artificial
Intelligence - SBIA 2004, 17th Brazilian Symposium
on Artificial Intelligence, São Luis, Maranhão, Brazil,
September 29 - October 1, 2004, Proceedings, pages
286–295.
Gama, J. a., Žliobait
˙
e, I., Bifet, A., Pechenizkiy, M., and
Bouchachia, A. (2014). A survey on concept drift
adaptation. ACM Comput. Surv., 46(4):44:1–44:37.
Gonçalves Jr, P. M., de Carvalho Santos, S. G., Barros, R. S.,
and Vieira, D. C. (2014). A comparative study on con-
cept drift detectors. Expert Systems with Applications,
41(18):8144–8156.
Gözüaçık, Ö., Büyükçakır, A., Bonab, H., and Can, F. (2019).
Unsupervised concept drift detection with a discrimi-
native classifier. In Proceedings of the 28th ACM in-
ternational conference on information and knowledge
management, pages 2365–2368.
Gretton, A., Borgwardt, K., Rasch, M., Schölkopf, B., and
Smola, A. (2006). A kernel method for the two-sample-
problem. volume 19.
Hanneke, S., Kanade, V., and Yang, L. (2015). Learning with
a drifting target concept. In Int. Conf. on Alg. Learn.
Theo, pages 149–164. Springer.
Harries, M., cse tr, U. N., and Wales, N. S. (1999). Splice-2
comparative evaluation: Electricity pricing. Technical
report.
Hinder, F., Artelt, A., and Hammer, B. (2019). A probability
theoretic approach to drifting data in continuous time
domains. arXiv preprint arXiv:1912.01969.
Hinder, F., Artelt, A., and Hammer, B. (2020). Towards
non-parametric drift detection via dynamic adapting
window independence drift detection (dawidd). In
ICML.
Hinder, F., Brinkrolf, J., Vaquet, V., and Hammer, B. (2021).
A shape-based method for concept drift detection and
signal denoising. In 2021 IEEE Symposium Series
on Computational Intelligence (SSCI), pages 01–08.
IEEE.
Hinder, F., Vaquet, V., and Hammer, B. (2022). Suitability of
different metric choices for concept drift detection. In
International Symposium on Intelligent Data Analysis,
pages 157–170. Springer.
Hu, H., Kantardzic, M., and Sethi, T. S. (2020). No free
lunch theorem for concept drift detection in streaming
data classification: A review. WIREs Data Mining and
Knowledge Discovery, 10(2):e1327.
Kosina, P. and Gama, J. (2013). Very fast decision rules
for classification in data streams. Data Mining and
Knowledge Discovery, 29:168–202.
Losing, V., Hammer, B., and Wersing, H. (2015). Interactive
online learning for obstacle classification on a mobile
robot. In 2015 international joint conference on neural
networks (ijcnn), pages 1–8. IEEE.
Lu, J., Liu, A., Dong, F., Gu, F., Gama, J., and Zhang, G.
(2018). Learning under concept drift: A review. IEEE
Transactions on Knowledge and Data Engineering,
31(12):2346–2363.
Manapragada, C., Webb, G. I., and Salehi, M. (2018). Ex-
tremely fast decision tree. In Proceedings of the 24th
ACM SIGKDD International Conference on Knowl-
edge Discovery & Data Mining, pages 1953–1962.
Mohri, M. and Muñoz Medina, A. (2012). New analysis and
algorithm for learning with drifting distributions. In Int.
Conf. on Alg. Learn. Theo, pages 124–138. Springer.
Montiel, J., Read, J., Bifet, A., and Abdessalem, T. (2018).
Scikit-multiflow: A multi-output streaming framework.
Journal of Machine Learning Research, 19(72):1–5.
Page, E. S. (1954). Continuous inspection schemes.
Biometrika, 41(1-2):100–115.
Pedregosa, F., Varoquaux, G., Gramfort, A., Michel, V.,
Thirion, B., Grisel, O., Blondel, M., Prettenhofer, P.,
Weiss, R., Dubourg, V., Vanderplas, J., Passos, A.,
Cournapeau, D., Brucher, M., Perrot, M., and Duch-
esnay, E. (2011). Scikit-learn: Machine learning
in Python. Journal of Machine Learning Research,
12:2825–2830.
Raab, C., Heusinger, M., and Schleif, F.-M. (2019). Reac-
tive soft prototype computing for frequent reoccurring
concept drift. In ESANN.
Shah, R. D. and Peters, J. (2020). The hardness of condi-
tional independence testing and the generalised covari-
ance measure. The Annals of Statistics, 48(3):1514–
1538.
Shalev-Shwartz, S. and Ben-David, S. (2014). Understand-
ing machine learning: From theory to algorithms.
Cambridge university press.
Street, W. N. and Kim, Y. (2001). A streaming ensemble
algorithm (SEA) for large-scale classification. In Pro-
ceedings of the seventh ACM SIGKDD international
conference on Knowledge discovery and data mining,
San Francisco, CA, USA, August 26-29, 2001, pages
377–382.
Vaquet, V., Menz, P., Seiffert, U., and Hammer, B. (2022).
Investigating intensity and transversal drift in hyper-
spectral imaging data. Neurocomputing, 505:68–79.
Webb, G. I., Lee, L. K., Petitjean, F., and Goethals, B. (2017).
Understanding concept drift. CoRR, abs/1704.00362.
On the Hardness and Necessity of Supervised Concept Drift Detection
175
