
Enhancing Deep Learning with Scenario-Based Override Rules: A Case
Study
Adiel Ashrov
a
and Guy Katz
b
The Hebrew University of Jerusalem, Jerusalem, Israel
Keywords:
Scenario-Based Modeling, Behavioral Programming, Machine Learning, Deep Neural Networks, Software
Engineering, Reactive Systems.
Abstract:
Deep neural networks (DNNs) have become a crucial instrument in the software development toolkit, due to
their ability to efficiently solve complex problems. Nevertheless, DNNs are highly opaque, and can behave
in an unexpected manner when they encounter unfamiliar input. One promising approach for addressing this
challenge is by extending DNN-based systems with hand-crafted override rules, which override the DNN’s
output when certain conditions are met. Here, we advocate crafting such override rules using the well-studied
scenario-based modeling paradigm, which produces rules that are simple, extensible, and powerful enough to
ensure the safety of the DNN, while also rendering the system more translucent. We report on two extensive
case studies, which demonstrate the feasibility of the approach; and through them, propose an extension to
scenario-based modeling, which facilitates its integration with DNN components. We regard this work as a
step towards creating safer and more reliable DNN-based systems and models.
1 INTRODUCTION
Deep learning (DL) algorithms have been revolution-
izing the world of Computer Science, by enabling
engineers to automatically generate software systems
that achieve excellent performance (Goodfellow et al.,
2016). DL algorithms can generalize examples of the
desired behavior of a system into an artifact called a
deep neural network (DNN), whose performance of-
ten exceeds that of manually designed software (Si-
monyan and Zisserman, 2014; Silver et al., 2016).
DNNs are now being extensively used in domains
such as game playing (Mnih et al., 2013), natural
language processing (Collobert et al., 2011), protein
folding (Jumper et al., 2021), and many others. In ad-
dition, they are also being used as controllers within
critical reactive systems, such as autonomous cars and
unmanned aircraft (Bojarski et al., 2016; Julian et al.,
2016).
Although systems powered by DNNs have
achieved unprecedented results, there is still room for
improvement. DNNs are trained automatically, and
are highly opaque — meaning that we do not compre-
hend, and cannot reason about, their decision-making
process. This inability is a cause for concern, as
DNNs do not always generalize well, and can make
a
https://orcid.org/0000-0003-4510-5335
b
https://orcid.org/0000-0001-5292-801X
severe mistakes. For example, it has been observed
that state-of-the-art DNNs for traffic sign recogni-
tion can misclassify “stop” signs, even though they
have been trained on millions of street images (Pa-
pernot et al., 2017). When DNNs are deployed in re-
active systems that are safety critical, such mistakes
could potentially endanger human lives. It is therefore
necessary to enhance the safety and dependability of
these systems, prior to their deployment in the field.
One appealing approach for bridging the gap be-
tween the high performance of DNNs and the re-
quired level of reliability is to guard DNNs with ad-
ditional, hand-crafted components, which could over-
ride the DNNs in case of clear mistakes (Shalev-
Shwartz et al., 2016; Avni et al., 2019). This, in turn,
raises the question of how to design and implement
these guard components. More recent work (Harel
et al., 2022; Katz, 2021a; Katz, 2020) has suggested
fusing DL with modern software engineering (SE)
paradigms, in a way that would allow for improving
the development process, user experience, and overall
safety of the resulting systems. The idea is to enable
domain experts to efficiently and conveniently pour
their knowledge into the system, in the form of hand-
crafted modules that will guarantee that unexpected
behavior is avoided.
Here, we focus on one particular mechanism for
producing such guard rules, through the scenario-
Ashrov, A. and Katz, G.
Enhancing Deep Learning with Scenario-Based Override Rules: A Case Study.
DOI: 10.5220/0011796600003402
In Proceedings of the 11th International Conference on Model-Based Software and Systems Engineering (MODELSWARD 2023), pages 253-268
ISBN: 978-989-758-633-0; ISSN: 2184-4348
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
253

based modeling (SBM) paradigm (Harel et al., 2012).
SBM is a software development paradigm, whose
goal is to enable users to model systems in a way
that is aligned with how they are perceived by hu-
mans (Gordon et al., 2012). In SBM, the user speci-
fies scenarios, each of which represents a single desir-
able or undesirable system behavior. These scenarios
are fully executable, and can be interleaved together
at runtime in order to produce cohesive system behav-
ior. Various studies have shown that SBM is particu-
larly suited for modeling reactive systems (Bar-Sinai
et al., 2018a); and in particular, reactive systems that
involve DNN components (Yerushalmi et al., 2022;
Corsi et al., 2022a).
The research questions that we tackled in this
work are:
1. Can the approach of integrating SBM and DL be
applied to state-of-the-art deep learning projects?
2. Are there idioms that, if added to SBM, could fa-
cilitate this integration?
To answer these questions, we apply SBM to guard
two reactive systems powered by deep learning: (1)
Aurora (Jay et al., 2019), a congestion control pro-
tocol whose goal is to optimize the communication
throughput of a computer network; and (2) the Turtle-
bot3 platform (Nandkumar et al., 2021), a mobile
robot capable of performing mapless navigation to-
wards a predefined target through the use of a pre-
trained DNN as its policy. In both cases, we instru-
ment the DNN core of the system with an SBM har-
ness; and then introduce guard scenarios for over-
riding the DNN’s outputs in various undesirable sit-
uations. In both case studies, we demonstrate that
our SBM components can indeed enforce various
safety goals. The answer to our first research ques-
tion is therefore positive, since these initial results
demonstrate the applicability and usefulness of this
approach.
As part of our work on the Aurora and Turtle-
bot3 systems, we observed that the integration be-
tween the underlying DNNs and SBM components
was not always straightforward. One recurring chal-
lenge, which the SBM framework could only par-
tially tackle, was the need for the SB model to react
immediately, in the same time step, to the decisions
made by the DNN — as opposed to only reacting to
actions that occurred in previous time steps (Harel
et al., 2012). This issue could be circumvented, but
this entailed using ad hoc solutions that go against
the grain of SBM. This observation answers our sec-
ond research question: indeed, certain enhancements
to SBM are necessary to facilitate a more seamless
combination of SBM and DL. In order to overcome
this difficulty in a more principled way, we propose
here an extension to the SBM framework with a new
type of scenario, which we refer to as a modifier sce-
nario. This extension enabled us to create a cleaner
and more maintainable scenario-based model to guard
the DNNs in question. We describe the experience of
using the new kind of scenario, and provide a formal
extension to SBM that includes it.
The rest of the paper is organized as follows.
In Sec. 2 we provide the necessary background on
DNNs, and their guarding using SBM. In Sec. 3 and
Sec. 4 we describe our two case studies. Next, in
Sec. 5 we present our extension to SBM, which sup-
ports modifier scenarios. We follow with a discussion
of related work in Sec. 6, and conclude in Sec. 7.
2 BACKGROUND
2.1 Deep Reinforcement Learning
At a high level, a neural network N can be regarded
as a transformation that maps an input vector x into
an output vector N(x). For example, the small net-
work depicted in Fig. 1 has an input layer, a sin-
gle hidden layer, and an output layer. After the in-
put nodes are assigned values by the user, the as-
signment of each consecutive layer’s nodes is com-
puted iteratively, as a weighted sum of neurons from
its preceding layer, followed by an activation func-
tion. For the network in Fig. 1, the activation function
in use is y = ReLU(x) = max(0, x) (Nair and Hinton,
2010). For example, for an input vector x = (x
1
, x
2
),
and an assignment x
1
= 1, x
2
= 0, this process re-
sults in the output neurons being assigned the values
y
1
= 0, y
2
= 2, and N(x) = (y
1
, y
2
). If the network
acts as a classifier, we slightly abuse notation and as-
sociate each label with the corresponding output neu-
ron. In this case, since y
2
has the higher score, input
x = (1, 0) is classified as the label y
2
. For additional
background on DNNs, see, e.g., (Goodfellow et al.,
2016).
x
1
1
x
2
0
v
2
1
v
3
2
v
4
0
y
1
0
y
2
2
1
2
−1
3
−2
1
1
1
Hidden layerInput layer Output layer
Figure 1: A small neural network. In orange: the values
computed for each neuron, for input (1, 0).
MODELSWARD 2023 - 11th International Conference on Model-Based Software and Systems Engineering
254
One method for producing DNNs is via deep rein-
forcement learning (DRL) (Sutton and Barto, 2018).
In DRL, an agent is trained to interact with an en-
vironment. Each time, the agent selects an action,
with the goal of maximizing a predetermined reward
function. The process can be regarded as a Markov
decision process (MDP), where the agent attempts to
learn a policy for maximizing its returns. DRL algo-
rithms are used to train DNNs to learn optimal poli-
cies, through trial and error. DRL has shown excellent
results in the context of video games, robotics, and
in various safety-critical systems such as autonomous
driving and flight control (Sutton and Barto, 2018).
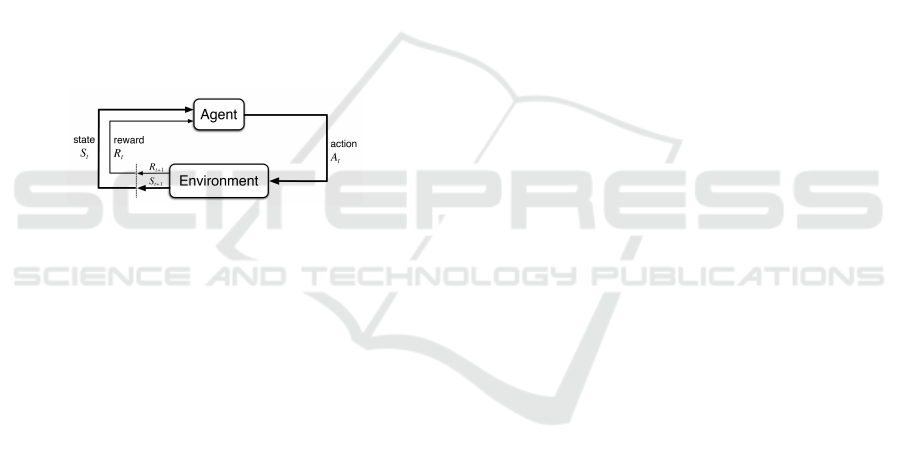
Fig. 2 describes the basic interaction between a
DRL agent and its environment. At time step t,
the agent examines the environment’s state s
t
, and
chooses an action a
t
according to its current policy.
At time step t + 1, and following the selected action
a
t
, the agent receives a reward R
t
= R(s
t
, a
t
). The en-
vironment then shifts to state s
t+1
where the process
is repeated. A DRL algorithm trains a DNN to learn
an optimal policy for this interaction.
Figure 2: The agent-environment interaction in reinforce-
ment learning (borrowed from (Sutton and Barto, 2018)).
2.2 Override Rules
Given a DNN N, an override rule (Katz, 2020) is de-
fined as a triple ⟨P, Q, α⟩, where:
• P is a predicate over the network’s input x.
• Q is a predicate over the network’s output N(x).
• α is an override action.
The semantics of an override rule is that if P(x) and
Q(N(x)) evaluate to True for the current input x and
the network calculation N(x), then the output action
α should be selected — notwithstanding of the net-
work’s output. For example, for the network from
Fig. 1, we might define the following rule:
⟨x
1
> x
2
, True, y
1
⟩
We previously saw that for inputs x
1
= 1, x
2
= 0, the
network selects the label corresponding to y
2
. How-
ever, if we enforce this override rule, the selection will
be modified to y
1
. This is because this particular in-
put satisfies the rule’s conditions (note that Q = True
means that there are no restrictions on the DNN’s out-
put). By adjusting P and Q, this formulation can ex-
press a large variety of rules (Katz, 2020).
2.3 Scenario-Based Modeling
Scenario-based modeling (SBM) (Harel et al., 2012),
also known as behavioral programming (BP), is a
paradigm for modeling complex reactive systems.
The approach is focused on enabling users to natu-
rally model their perception of the system’s require-
ments (Gordon et al., 2012). At the center of this
approach lies the concept of a scenario object: a de-
piction of a single behavior, either desirable or un-
desirable, of the system being modeled. Each sce-
nario object is created separately, and has no direct
contact with the other scenarios. Rather, it communi-
cates with a global execution mechanism, which can
execute a set of scenarios in a manner that produces
cohesive global behavior.
More specifically, a scenario object can be viewed
as a transition system, whose states are referred
to as synchronization points. When the scenario
reaches a synchronization point, it suspends and de-
clares which events it would like to trigger (requested
events), which events are forbidden from its perspec-
tive (blocked events), and which events it does not ex-
plicitly request, but would like to be notified should
they be triggered (waited-for events). The execution
infrastructure waits for all the scenarios to synchro-
nize (or for a subset thereof (Harel et al., 2013)), and
selects an event that is requested and not blocked for
triggering. The mechanism then notifies the scenarios
requesting/waiting-for this event that it has been trig-
gered. The notified scenarios proceed with their exe-
cution until reaching the next synchronization point,
where the process is repeated.
A toy example of a scenario-based model appears
in Fig. 3. This model is designed to control a Robo-
tis Turtlebot 3 platform (Turtlebot, for short) (Nand-
kumar et al., 2021; Amsters and Slaets, 2019). The
robot’s goal is to perform mapless navigation towards
a predefined target, using information from lidar sen-
sors and information about the current angle and dis-
tance from the target. The scenarios are described
as transition systems, where nodes represent synchro-
nization points. The MOVEFORWARD scenario waits
for the INPUTEVENT event, which includes a pay-
load vector, v
t
, that contains sensor readings. If v
t
indicates that the area directly in front of the robot
is clear, the scenario requests the event FORWARD.
Clearly, in many cases moving forward is insufficient
for solving a maze, and so we introduce a second sce-
nario, TURNLEFT. This scenario waits for an IN-
PUTEVENT event with a payload vector v
t
indicating
that the area to the left of the robot is clear. It then re-
quests the LEFT event. Further, the TURNLEFT sce-
nario blocks the FORWARD event, to make the robot
Enhancing Deep Learning with Scenario-Based Override Rules: A Case Study
255

prefer a left turn to a move forward (inspired by the
left-hand rule (Contributors, 2022b)). Finally, The
MOVEFORWARD scenario waits for the event LEFT,
to return to its initial state even if the FORWARD event
was not triggered.
The SBM paradigm is well established, and has
been studied thoroughly in the past years. It has
been implemented on top of Java (Harel et al., 2010),
JavaScript (Bar-Sinai et al., 2018b), ScenarioTools,
C++ (Harel and Katz, 2014), and Python (Yaacov,
2020); and has been used to model various complex
systems, such as cache coherence protocols, robotic
controllers, games, and more (Harel et al., 2016;
Ashrov et al., 2015; Harel et al., 2018). A key advan-
tage of SBM is that its models can be checked and for-
mally verified (Harel et al., 2015b), and that automatic
tools can be applied to repair and launch SBM in dis-
tributed environments (Steinberg et al., 2018; Harel
et al., 2014; Harel et al., 2015a).
In formalizing SBM, we follow the definitions
of Katz (Katz, 2013). A scenario object O over a
given event set E is abstractly defined as a tuple
O = ⟨Q, q
0
, δ, R, B⟩, where:
• Q is a set of states, each representing one of the
predetermined synchronization points.
• q
0
∈ Q is the initial state.
• R : Q → 2
E
and B : Q → 2
E
map states to the sets
of events requested or blocked at these states (re-
spectively).
• δ : Q × E → Q is a deterministic transition func-
tion, indicating how the scenario reacts when an
event is triggered.
Let M = {O
1
, ...,O
n
} be a be a behavioral model,
where n ∈ N and each O
i
= ⟨Q
i
, q
i
0
, δ
i
, R
i
, B
i
⟩ is a dis-
tinct scenario. In order to define the semantics of M,
we construct a deterministic labeled transition system
LTS(M) = ⟨Q, q
0
, δ⟩, where:
• Q := Q
1
× ... × Q
n
is the set of states.
• q
0
:= ⟨q
1
0
, ...,q
n
0
⟩ ∈ Q is the initial state.
• δ : Q × E → Q is a deterministic transition func-
tion, defined for all q = ⟨q
1
, ...,q
n
⟩ ∈ Q and e ∈ E,
by:
δ(q, e) := ⟨δ
1
(q
1
, e), ..., δ
n
(q
n
, e)⟩
An execution of M is an execution of the induced
LTS(M). The execution starts at the initial state q
0
.
In each state q = ⟨q
1
, . . . ,q
n
⟩ ∈ Q, the event selection
mechanism (ESM) inspects the set of enabled events
E(q) defined by:
E(q) :=
n
[
i=1
R
i
(q
i
) \
n
[
i=1
B
i
(q
i
)
If E(q) ̸=
/
0, the mechanism selects an event e ∈
E(q) (which is requested and not blocked). Event e
is then triggered, and the system moves to the next
state, q
′
= δ(q, e), where the execution continues. An
execution can be formally recorded as a sequence of
triggered events, called a run. The set of all complete
runs is denoted by L (M) ≜ L(LTS(M)). It contains
both infinite runs, and finite runs that end in terminal
states, i.e. states in which there are no enabled events.
2.4 Modeling Override Scenarios Using
SBM
We follow a recently proposed method (Katz, 2020;
Katz, 2021a) for designing SBM models that inte-
grate scenario objects and a DNN controller. The
main concept is to represent the DNN as a scenario
object, O
DNN
, that operates as part of the scenario-
based model, enabling the different scenarios to in-
teract with the DNN. As a first step, we assume that
there is a finite set of possible inputs to the DNN, de-
noted I; and let O mark the set of possible actions the
DNN can select from (we relax the limitation of finite
event sets later on). We add new events to the event
set E: an event e
i
that contains a payload of the in-
put values for every i ∈ I, and an event e
o
for every
o ∈ O. The scenario object O
DNN
continually waits
for all events e
i
, and then requests all output events e
o
.
This modeled behavior captures the black-box nature
of the DNN: after an input arrives, one of the pos-
sible outputs is chosen, but we do not know which.
However, when the model is deployed, the execution
infrastructure evaluates the actual DNN, and triggers
the event that it selects. For instance, assuming that
there are only two possible inputs: i
1
= ⟨1, 0⟩ and
i
2
= ⟨0, 1⟩, the network portrayed in Fig. 1 would be
represented by the scenario object depicted in Fig. 4.
By convention, we stipulate that scenario objects
in the system may wait-for the input events e
i
, but
may not block them. A dedicated scenario object, the
sensor, is in charge of requesting an input event when
the DNN needs to be evaluated. Another convention
is that only the O
DNN
may request the output events,
e
o
; although other scenarios may wait-for or block
these events. At run time, if the DNN’s classification
result is an event which is currently blocked, the event
selection mechanism resolves this by selecting a dif-
ferent output event which is not blocked. If there are
no unblocked events, the system is considered dead-
locked, and the SBM program terminates. The moti-
vation for these conventions is to allow scenario ob-
jects to monitor the DNN’s inputs and outputs. The
scenarios can then intervene, and override the DNN’s
output — by blocking specific output events. An over-
MODELSWARD 2023 - 11th International Conference on Model-Based Software and Systems Engineering
256
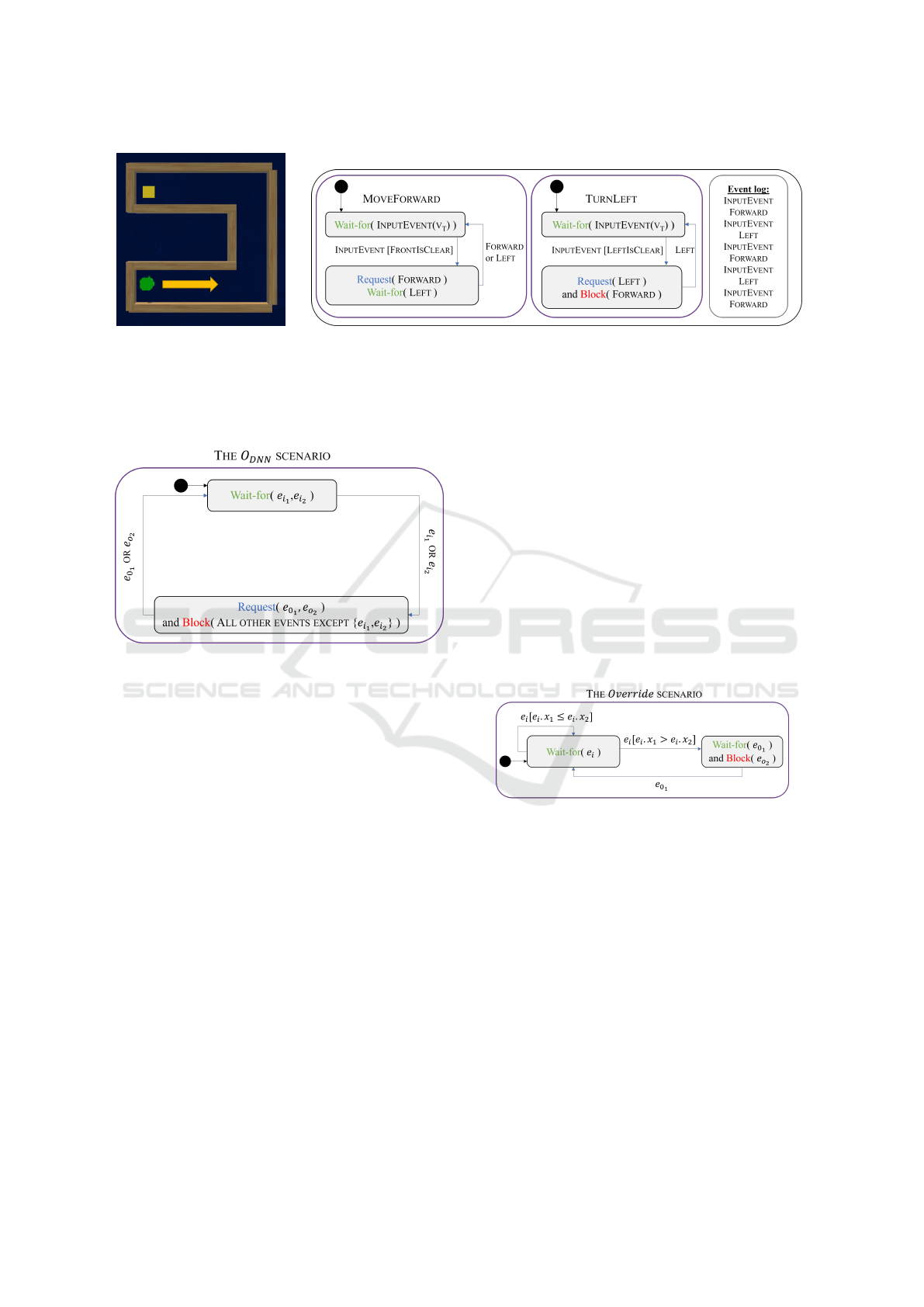
Figure 3: On the left, a screenshot of the Turtlebot simulator, where the robot is headed right and the target appears in the
top left corner. In the middle, the scenario-based model, written in Statechart-like transition systems (Harel, 1986) extended
with SBM. The model contains two scenarios: The MOVEFORWARD scenario and the TURNLEFT scenario. The black circles
specify the initial state. In each state the scenario can request, wait-for or block events. Once a requested/waited-for event
is triggered, the scenario transitions to the appropriate state (highlighted by a connecting edge with the event name and an
optional Boolean condition). On the right, a log of the triggered events during the execution, for this particular maze.
Figure 4: A figure of the O
DNN
scenario object correspond-
ing to the neural network in Fig. 1 described in statecharts.
The black circle indicates the initial state. The scenario
waits for the events e
i
1
and e
i
2
that represent the inputs to
the neural network. These events contain a payload with
the actual values assigned. The scenario then proceeds to
request the events e
o
1
and e
o
2
, which represent the possible
output labels y
1
, y
2
respectively (inspired by (Katz, 2021a)).
ride scenario can coerce the DNN to select a specific
output, by blocking all other output events; or it can
interfere in a more subtle manner, by blocking some
output events, while allowing O
DNN
to select from the
remaining ones. One strategy for selecting an alter-
nate output event in a classification problem will be
to select the event with the next-to-highest score.
In practice, the requirement that the event sets I
and O be finite is restrictive, as DNNs typically have
a very large (effectively infinite) number of possible
inputs. To overcome this restriction, we follow the ex-
tension proposed in (Katz et al., 2019), which enables
us to treat events as typed variables, or sets thereof.
Using this extension, the various scenarios can affect,
through requesting and blocking, the possible values
of these variables; and a scenario object’s transitions
may be conditioned upon the values of these vari-
ables. In particular, these variables can be used to
express an infinite number of possible inputs and out-
puts of a DNN.
Using the aforementioned extension, the override
rule from Sec. 2.1 is depicted in Fig. 5. The scenario
waits for the input event e
i
, which now contains as
a payload two real-valued variables, x
1
and x
2
, that
represent the actual assignment to the DNN’s inputs.
The transitions of the scenario object are then condi-
tioned upon the values of these variables: if the pred-
icate P holds for this input, the scenario transitions to
its second state, where it overrides the DNN’s output
by blocking the output event e
y
2
, which necessarily
causes the triggering of e
y
1
.
Figure 5: A scenario object for enforcing the override rule
defined in Sec. 2.2. The scenario waits for the input event e
i
and inspects the payload to see if the predicate P holds for
the given input. It then continues to wait for the output event
e
o
1
, while blocking the unwanted event e
o
2
. This blocking
forces the triggering of output event e
o
1
. Once this happens,
the scenario returns to its initial state.
3 CASE STUDY: THE AURORA
CONGESTION CONTROLLER
For our first case study, we focus on Aurora (Jay et al.,
2019) — a recently proposed performance-oriented
congestion control (PCC) protocol, whose purpose is
to manage a computer network (e.g., the Internet).
Aurora’s goal is to maximize the network’s through-
put, and to prevent “congestive collapses”, i.e., sit-
Enhancing Deep Learning with Scenario-Based Override Rules: A Case Study
257
uations where the incoming traffic rate exceeds the
outgoing bandwidth and packets are lost. Aurora is
powered by a DRL-trained DNN agent that attempts
to learn an optimal policy with respect to the envi-
ronment’s state and reward, which reflect the agent’s
performance in previous batches of sent packets. The
action selected by the agent is the sending rate that is
used for the next batch of packets. It has been shown
that Aurora can obtain impressive results, competitive
with modern, hand-crafted algorithms for similar pur-
poses (Jay et al., 2019).
Aurora employs the concept of monitor intervals
(MIs) (Dong et al., 2018), in which time is split into
consecutive intervals. At the start of each MI, the
agent’s chosen action a
t
(a real value) is selected as
the sending rate for the current MI, and it remains
fixed throughout the interval. This rate affects the
pace, and eventually the throughput, of the protocol.
After the MI has finished, a vector v
t
containing real-
valued performance statistics is computed from data
collected during the interval. Subsequently, v
t
is pro-
vided as the environment state to the agent, which
then proceeds to select a new sending rate a
t+1
for
the next MI, and so on. For a more extensive back-
ground on performance-oriented congestion control,
see (Dong et al., 2015).
As a supporting tool, Aurora is distributed with
the PCC-DL simulator (Meng et al., 2020a) that en-
ables the user to test Aurora’s performance. The sim-
ulator has two built-in congestion control protocols:
• The PCC-IXP protocol: a simple protocol that ad-
justs the sending rate using a hard-coded function.
• The PCC-Python protocol: a protocol that utilizes
a trained Aurora agent to adjust the sending rate.
Both of these protocols are classified as normal (pri-
mary) protocols that aspire to maximize their through-
put (Meng et al., 2020b).
We chose Aurora as our first case study because
of its reactive nature: it receives external input from
the environment, processes this information using
the trained DRL agent, and acts on it with the next
sending rate. SBM is well suited for reactive sys-
tems (Harel et al., 2012), and Aurora matched our
requirements to enhance a reactive DL system. The
goals we set out to achieve in this case study are de-
tailed in the following section.
3.1 Integrating Aurora and SBM
Our first goal was to instrument the Aurora DNN
agent with the O
DNN
infrastructure, and integrate it
with an SB model. This was achieved through the
inclusion of the C++ SBM package (Harel and Katz,
2014; Katz, 2021b) in the simulator; and the intro-
duction of a new protocol, PCC-SBM, which extends
the PCC-Python protocol and launches an SB model
that includes the O
DNN
scenario. This process, on
which we elaborate next, required significant techni-
cal work — and successfully produced an integrated
SBM/DNN model that performed on par with the
original, DNN-based model.
The simulator interacts with the PCC-SBM pro-
tocol in two ways: (i) it provides the statistics of the
current MI; and (ii) it requests the next sending rate.
Thus, we began the SBM/DNN integration by intro-
ducing a SENSOR scenario, whose purpose is to in-
ject MONITORINTERVAL and QUERYNEXTSENDIN-
GRATE events into the SB model, to allow it to com-
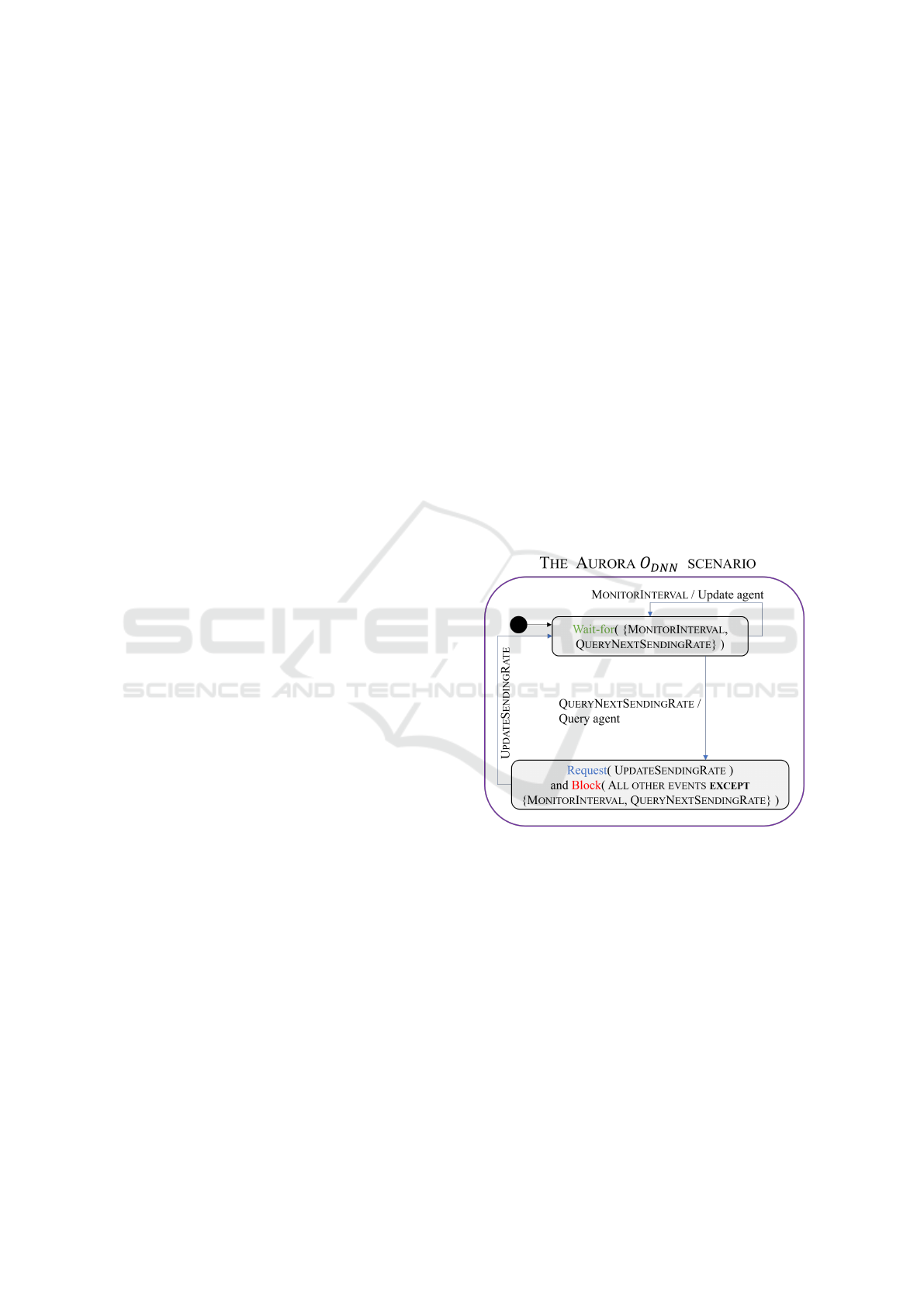
municate with the simulator. Fig. 6 depicts the AU-
RORA O
DNN
scenario (using a combination of State-
charts and SBM visual languages (Harel, 1986; Mar-
ron et al., 2018)), which waits for these events in its
initial state. The event MONITORINTERVAL carries,
as a payload, the MI statistics vector, v
t
, whose entries
are real values.
Figure 6: The AURORA O
DNN
scenario.
When MONITORINTERVAL is triggered, the
statistics vector is provided as the input to the under-
lying DNN, and when the event QUERYNEXTSEND-
INGRATE is triggered, the scenario extracts the
DNN’s output, and then uses it as a payload for
an UPDATESENDINGRATE that it requests — while
blocking all other, non-input events. Finally, we in-
troduce an ACTUATOR scenario, which waits for the
event UPDATESENDINGRATE and updates the simu-
lator on the selected sending rate for the next batch of
packets.
MODELSWARD 2023 - 11th International Conference on Model-Based Software and Systems Engineering
258

3.2 Supporting Scavenger Mode
For our second, more ambitious goal, we set out to
extend the Aurora system with a new behavior, with-
out altering its underlying DNN: specifically, with
the ability to support scavenger mode (Meng et al.,
2020b). The scavenger protocol is a “polite” protocol,
meaning it can yield its throughput if there is competi-
tion in the same physical network. Of course, such be-
havior needs to be temporary, and when the other traf-
fic on the physical network subsides, the scavenger
protocol should again increase its throughput, utiliz-
ing as much of the available bandwidth as possible.
In order to add scavenger mode support, we added
the following scenarios:
• The MONITORNETWORKSTATE scenario object,
which inspects the state of the physical network
and requests a specific event: the ENTERYIELD
event that marks that the conditions for entering
yield mode, in which sending rates should be re-
duced, are met.
• The REDUCETHROUGHPUT scenario object,
which is an override scenario. This scenario first
waits-for a notification that the protocol should
enter yield mode, and then proceeds to override
the DNN’s calculated sending rate with a lower
sending rate.
Our plan was for the REDUCETHROUGHPUT scenario
to support three override policies: (i) an immediate
decline to a fixed, low sending rate; (ii) a gradual de-
cline, using a step function; and (iii) a gradual de-
cline, using exponential decay. However, we quickly
observed that the existing override scenario formula-
tion (as presented in Sec. 2.4) was not suitable for this
task.
Recall that an override scenario overrides O
DNN
’s
output by blocking any unwanted output events, and
coercing the event selection mechanism to select a
different output event that is not blocked. In our case,
however, we needed REDUCETHROUGHPUT to act as
an override scenario that blocks some output events
based on the output selected by O
DNN
, in the current
time step. For example, in the case of a gradual de-
cline in the sending rate, if O
DNN
would normally se-
lect sending rate x, we might want to force the selec-
tion of rate
x
2
, instead; but this requires knowing the
value of x, in advance, which is simply not possible
using the current formulation (Katz, 2020).
To circumvent this issue within the existing mod-
eling framework, we introduce a new “proxy event”,
UPDATESENDINGRATEREDUCE, intended to serve
as a middleman between the AURORA O
DNN
sce-
nario and its consumers. Our override scenario, RE-
DUCETHROUGHPUT, no longer directly blocks cer-
tain values that the DNN might produce. Instead, it
waits-for the UPDATESENDINGRATE event produced
by AURORA O
DNN
, manipulates its real-valued pay-
load as needed, and then requests the proxy event
UPDATESENDINGRATEREDUCE with the (possibly)
modified value. Then, in every scenario that orig-
inally waited-for the UPDATESENDINGRATE event,
we rename the event to UPDATESENDINGRATERE-
DUCE, so that the scenario now waits for the proxy
event, instead. Fig. 7 visually illustrates the final ver-
sion of the REDUCETHROUGHPUT scenario.
After entering scavenger mode and lowering the
sending rate, a natural requirement is that the sys-
tem eventually reverts to a higher sending rate, when
scavenger mode is no longer required. To achieve
this, we adjust the MONITORNETWORKSTATE sce-
nario to dynamically identify this situation, and sig-
nal to the other scenarios that the system has en-
tered restore mode, by requesting the event ENTER-
RESTORE. We then introduce a second override sce-
nario, RESTORETHROUGHPUT, that can increase the
protocol’s throughput according to one of two prede-
fined policies: (i) an immediate return to the model’s
original output; or (ii) a slow start policy (Contribu-
tors, 2022a).
The RESTORETHROUGHPUT scenario waits-for
the events ENTERRESTORE, ENTERYIELD and UP-
DATESENDINGRATE. The first two events signal the
scenario to enter/exit restore mode. When UPDATE-
SENDINGRATE is triggered and the scenario is in re-
store mode, it overrides the value according to the pol-
icy in use, and requests an output event with a modi-
fied value. Utilizing the UPDATESENDINGRATERE-
DUCE event for this purpose would result in two,
likely contradictory output events being requested at a
single synchronization point. To avoid this, we intro-
duce a new event, UPDATESENDINGRATERESTORE,
to be requested by the RESTORETHROUGHPUT sce-
nario, while blocking the possible UPDATESENDIN-
GRATEREDUCE event at the synchronization point.
This decision prioritizes ratio restoration over yield-
ing (although any other prioritization rule could be
used). Finally, in every scenario that requests/waits-
for the UPDATESENDINGRATEREDUCE event, we
add a wait-for the UPDATESENDINGRATERESTORE
event. In this manner, these scenarios can proceed
with their execution despite being blocked.
3.3 Evaluation
For evaluation purposes, we implemented the sce-
nario objects described in Sec. 3.2, and then used Au-
rora’s simulator to evaluate the enhanced model’s per-
formance, compared to that of the original (Ashrov
Enhancing Deep Learning with Scenario-Based Override Rules: A Case Study
259
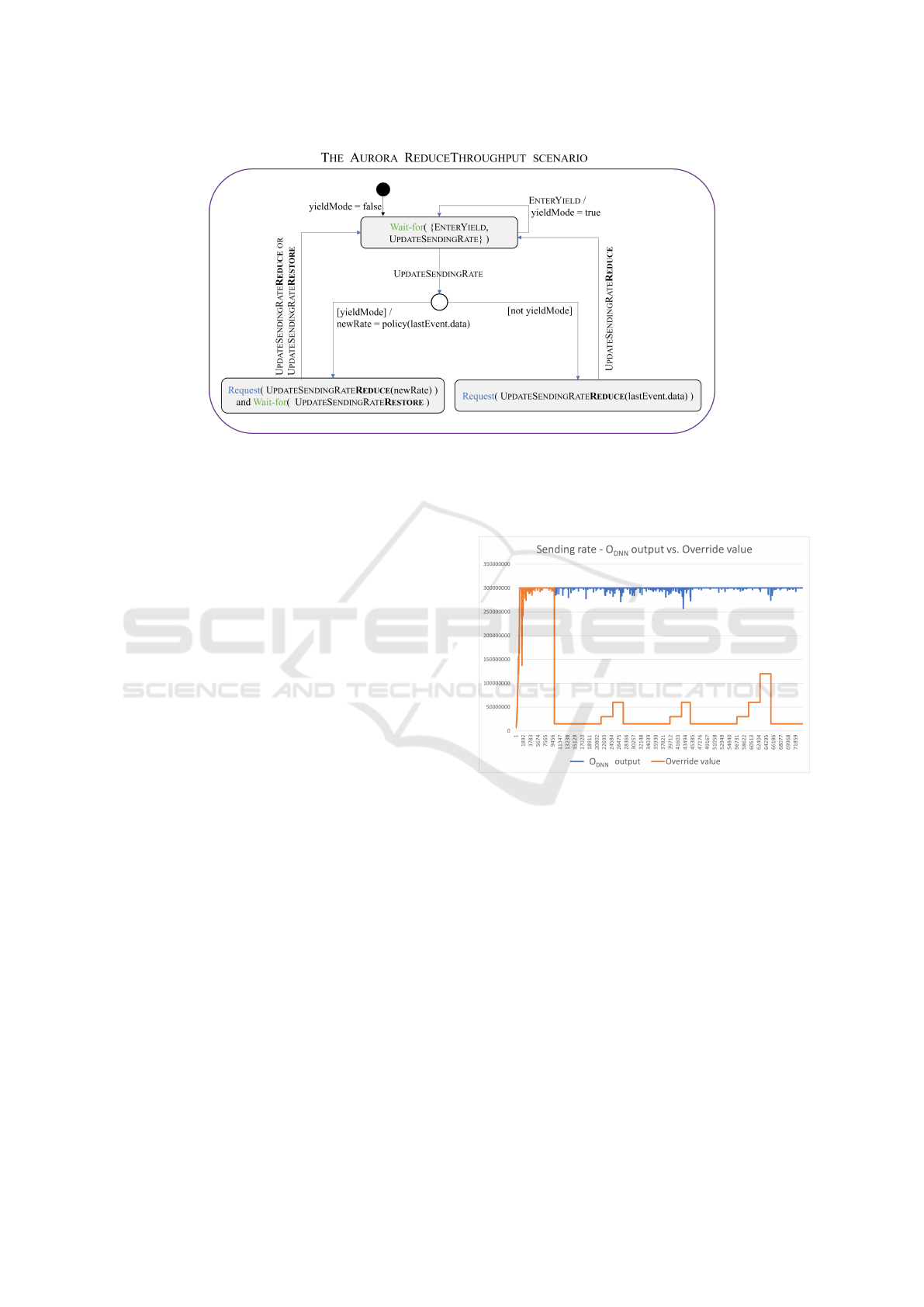
Figure 7: The Aurora REDUCETHROUGHPUT scenario, described using Statecharts enhanced with SBM. The black circle
specifies the initial state. The scenario waits-for ENTERYIELD event to enter yield mode. If yield mode is enabled, the UP-
DATESENDINGRATE event payload will be modified, and the UPDATESENDINGRATEREDUCE will be requested. Otherwise,
the payload is propagated as-is in the “proxy” UPDATESENDINGRATEREDUCE event. The scenario waits for UPDATESEND-
INGRATERESTORE to return to its initial state, in case UPDATESENDINGRATEREDUCE is blocked.
and Katz, 2023). Our results, described below, in-
dicate that the modified system successfully supports
scavenger mode, although its internal DNN remained
unchanged.
Fig. 8 depicts the sending rate requested by the
AURORA O
DNN
scenario, following an input event
QUERYNEXTSENDINGRATE, and the actual sending
rate that was eventually returned to the simulator by
the PCC-SBM protocol. We notice that initially, the
two values coincide, indicating that no overriding is
triggered — because the MONITORNETWORKSTATE
scenario did not yet signal that the system should
enter yield mode. However, once this signal oc-
curs, the REDUCETHROUGHPUT scenario overrides
the sending rate, according to the fixed rate policy.
After a while, the MONITORNETWORKSTATE de-
tects that it is time to once again increase the sending
rate, and signals that the system should enter restore
mode. As a result, we see an increase, per the “slow
start” restoration policy of RESTORETHROUGHPUT.
The ensuing back-and-forth switching between yield
and restore modes demonstrates that the MONITOR-
NETWORKSTATE scenario dynamically responds to
changes in environmental conditions.
In another experiment, we compared the through-
put (MB/s) of the primary PCC-IXP protocol with
that of the PCC-SBM protocol, when the two are ex-
ecuted in parallel. The results appear in Fig. 9. We
observe that there is a resemblance between the over-
ridden sending rate value seen in Fig. 8 and the actual
throughput. When the MONITORNETWORKSTATE
scenario signals to yield, the sending rate declines to a
fixed value, which in turn leads to a fixed throughput.
Figure 8: The AURORA O
DNN
original model output,
vs. the values produced by the override scenarios. The pol-
icy used for reduction is an immediate decline to a fixed
rate. The policy used for restoration is “slow start”.
Additionally, when the sending rate increases after a
signal to restore, the throughput of the protocol in-
creases as well. Another interesting phenomenon is
that when the PCC-SBM relinquishes bandwidth, the
PCC-IXP increases its own throughput, which is the
behavior we expect to see. We speculate that the yield
of the PCC-SBM enabled this increase.
4 CASE STUDY: THE ROBOTIS
Turtlebot3 PLATFORM
For our second case study, we chose to enhance a DL
system trained by Corsi et al. (Corsi et al., 2022a;
MODELSWARD 2023 - 11th International Conference on Model-Based Software and Systems Engineering
260

Figure 9: The recorded throughput (MB/s) of the PCC-IXP
and PCC-SBM protocols, when executed in parallel using
the PCC simulator.
Corsi et al., 2022b), which aims to solve a setup of
the mapless navigation problem. The system con-
tains a DNN agent whose goal is to navigate a Turtle-
bot 3 (Turtlebot) robot (Robotis, 2023; Amsters and
Slaets, 2019) to a target destination, without collid-
ing with obstacles. Contrary to classical planning, the
robot does not hold a global map, but instead attempts
to navigate using readings from its environment. A
successful navigation policy must thus be dynamic,
adapting to changes in local observations as the robot
moves closer to its destination. DRL algorithms have
proven successful in learning such a policy (March-
esini and Farinelli, 2020).
We refer to the DNN agent that controls the Turtle-
bot as TRL (for Turtlebot using RL). The agent learns
a navigation policy iteratively: in each iteration, it
is provided with a vector v
t
that comprises (i) nor-
malized lidar scans of the robot’s distance from any
nearby obstacles; and (ii) the angle and the distance
of the robot from the target. The agent then evaluates
its internal DNN on v
t
, obtaining a vector v
a
t
that con-
tains a probability distribution over the set of possible
actions the Turtlebot can perform: moving forward, or
turning left or right. For example, one possible vec-
tor is v
a
t
= [(Forward,0.2), (Left, 0.5), (Right, 0.3)].
Using this vector, the agent then randomly selects
an action according to the distribution, navigates the
Turtlebot, and receives a reward.
The DNN at the core of the TRL controller is
trained and tested in a simulation environment that
contains a sim-robot Turtlebot 3 burger (Robotis,
2023), and a single, fixed maze, created using the
ROS2 framework (ROS, 2023) and the Unity3D en-
gine (Unity, 2023). In each session, the robot’s start-
ing location is drawn randomly, which enables a di-
verse scan of the input space. The navigation session
has four possible outcomes: (i) success; (ii) collision;
(iii) timeout; or (iv) an unknown failure.
We selected the Turtlebot project as our second
case study due to its reactive characteristics: it reads
external information using its sensors, applies an in-
ternal logic to select the next action, and then acts
by moving towards the target. SBM has previously
been applied to model robot navigation and maze
solving (Elyasaf, 2021; Ashrov et al., 2017), which
strengthened our intuition that an enhancement of the
Turtlebot with SBM is feasible. Next, we outline the
objectives we aimed to achieve in this case study.
4.1 Integrating Turtlebot and SBM
Similarly to the Aurora case, our first goal was to in-
strument the Turtlebot DNN with the O
DNN
infras-
tructure, so that it could be composed with an SB
model. This was achieved by using the Python im-
plementation of SBM (Yaacov, 2020), and integrating
it with the TRL code. We created a SENSOR scenario
that waits for the current state vector v
t
, and injects an
INPUTEVENT containing v
t
into the SB model; and
also an ACTUATOR scenario that waits for an internal
OUTPUTEVENT, and transmits its action as the one to
be carried out by the Turtlebot.
Next, we proceeded to create the TURTLEBOT
O
DNN
scenario for TRL. Unlike in the Aurora case,
where the DNN would output a single chosen event,
here the DNN outputs a probability distribution over
the possible actions (a common theme in DRL-based
systems (Sutton and Barto, 2018)). To accommo-
date this, we adjusted our O
DNN
scenario to request
all the possible output events in the form of a vec-
tor P
at
, which contains each possible action and its
probability. We then modified SBM’s event selec-
tion mechanism to randomly select a requested out-
put event from P
at
, with respect to the induced prob-
ability distribution. The mechanism then triggers the
OUTPUTEVENT, which contains in its payload the se-
lected action and its probability. During modeling and
experimentation, the scenario can assign any proba-
bility distribution (e.g., uniform) to the DNN’s output
events; and during deployment, these values are com-
puted using the actual DNN (see Fig. 10). If the event
selection mechanism selects an event that is blocked,
the selection is repeated, until a non-blocked event is
selected. If there are no enabled events, then the sys-
tem is deadlocked and the program ends. Using this
approach, our Turtlebot controller could successfully
navigate in various mazes.
Once the O
DNN
infrastructure was in place, we
verified that the augmented program’s performance
was similar to that of the original agent. This
was achieved by comparing the models pre-trained
Enhancing Deep Learning with Scenario-Based Override Rules: A Case Study
261
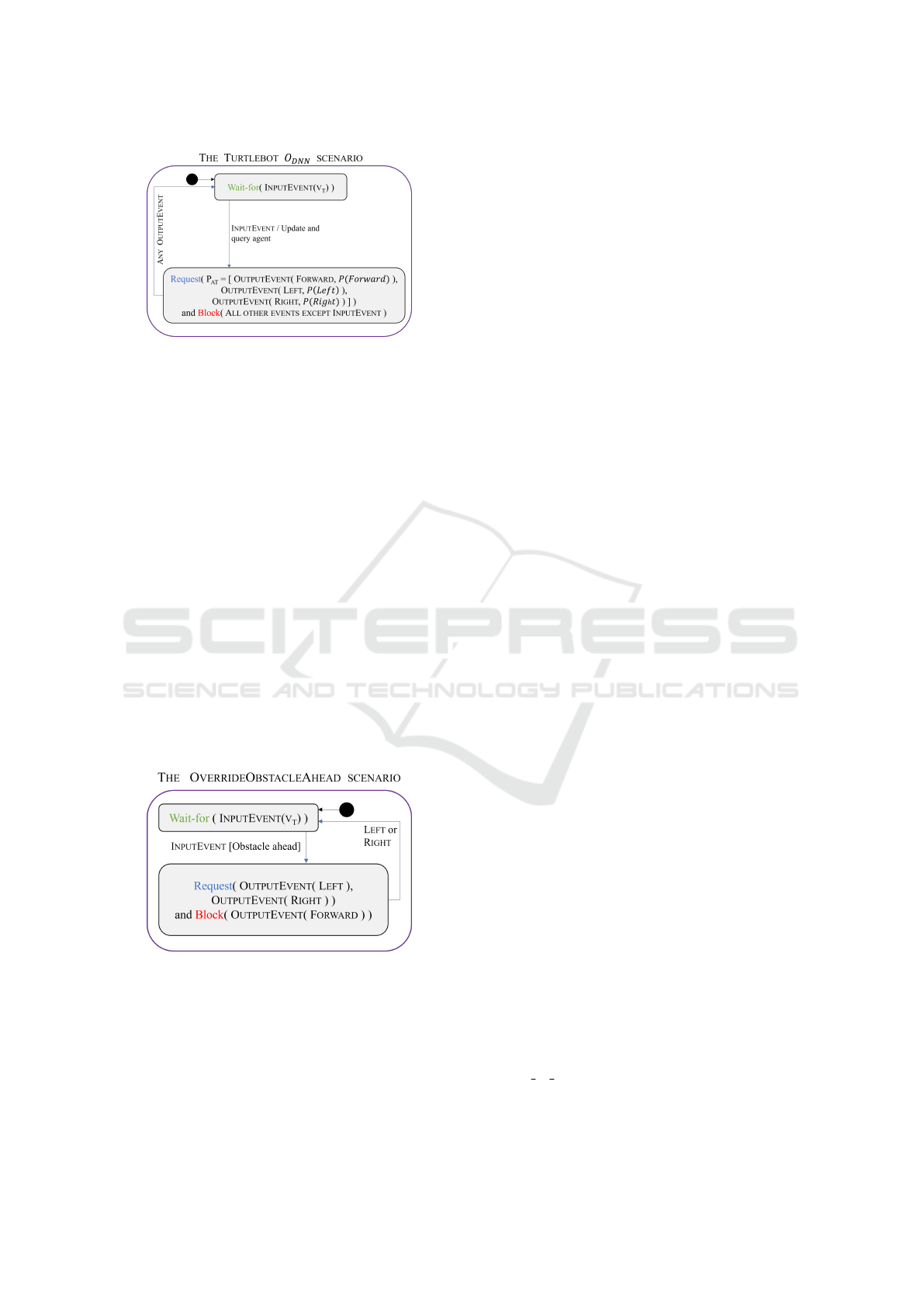
Figure 10: The TURTLEBOT O
DNN
scenario. The scenario
waits for an INPUTEVENT containing v
t
, provides it to the
agent, and receives a vector P
at
of possible actions and prob-
abilities. It then proceeds to request all the output events
from the ESM using P
at
. At the synchronization point, the
ESM executes the TURTLEBOT O
DNN
event selection strat-
egy, and one possible OUTPUTEVENT is triggered.
by (Corsi et al., 2022a) to our SBM-enhanced ver-
sion, and checking that both agents obtained similar
success rates on various mazes.
4.2 A Conservative Controller
For our second goal, we sought to increase the
model’s safety, by implementing a basic override rule,
OVERRIDEOBSTACLEAHEAD, which would prevent
the Turtlebot from colliding with an obstacle that is
directly ahead. This can be achieved by analyzing the
DNN’s inputs, which include the lidar readings, and
identifying cases where a move forward would guar-
antee a collision; and then blocking this move, forcing
the system to select a different action. An illustration
of this simple override rule appears in Fig. 11.
Figure 11: The OVERRIDEOBSTACLEAHEAD scenario
waits for an INPUTEVENT containing v
t
, and inspects the
lidar sensors facing forward readings. If distance < 0.22,
moving forward will cause a collision. Therefore the sce-
nario blocks the OUTPUTEVENT(FORWARD) event.
As we were experimenting with the Turtlebot
and various override rules, we noticed the follow-
ing, interesting pattern. Recall that a Turtlebot agent
learns a policy, which, for a given state s
t
, pro-
duces a probability distribution over the actions, a
t
=
[P(Forward), P(Left), P(Right)]. We can regard this
vector as the agent’s confidence levels that each of the
possible actions will bring the Turtlebot closer to its
goal. The random selection that follows takes these
confidence levels into account, and is more likely to
select an action that the agent is confident about; but
this is not always the case. Specifically, we observed
that for “weaker” models, e.g. models with about a
50% success rate, the agent would repeatedly select
actions with a low confidence score, which would of-
ten lead to a collision. This observation led us to de-
sign our next override scenario, CONSERVATIVEAC-
TION, which is intended to force the agent to select
actions only when their confidence score meets a cer-
tain threshold.
Ideally, we wish for CONSERVATIVEACTION to
implement the following behavior: (i) wait-for the
OUTPUTEVENT being selected (ii) examine whether
the confidence score in its payload is below a certain
threshold, and if so, (iii) apply blocking to ensure that
a different OUTPUTEVENT, with a higher score, is se-
lected for triggering. This method again requires that
the override scenario be able to inspect the content
of the OUTPUTEVENT being triggered in the current
time step.
To overcome this issue, we add a new, proxy event
called OUTPUTEVENTPROXY, and adjust all exist-
ing scenarios that would previously wait for OUT-
PUTEVENT to wait for this new event, instead. Then,
we have the CONSERVATIVEACTION scenario wait-
for the input event to O
DNN
, and have it replay
that event to initiate additional evaluations of the
DNN, and the ensuing random picking of the OUT-
PUTEVENT, until an acceptable output action is se-
lected. When this occurs, the CONSERVATIVEAC-
TION scenario propagates the selected action as an
OUTPUTEVENTPROXY event.
4.3 Evaluation
For evaluation purposes, we trained a collection
of agents, C
agents
, using the technique of Corsi et
al. (Corsi et al., 2022b). These agents had varying
success rates, ranging from 4% to 96%. Next, we
compared the performance of these agents to their
performance when enhanced by our SB model.
In the first experiment, we disabled our override
rule, and had every agent in C
agents
solve a maze from
100 different random starting points. The statistics we
measured were:
• num of solved: the number of times the agent
reached the target.
MODELSWARD 2023 - 11th International Conference on Model-Based Software and Systems Engineering
262
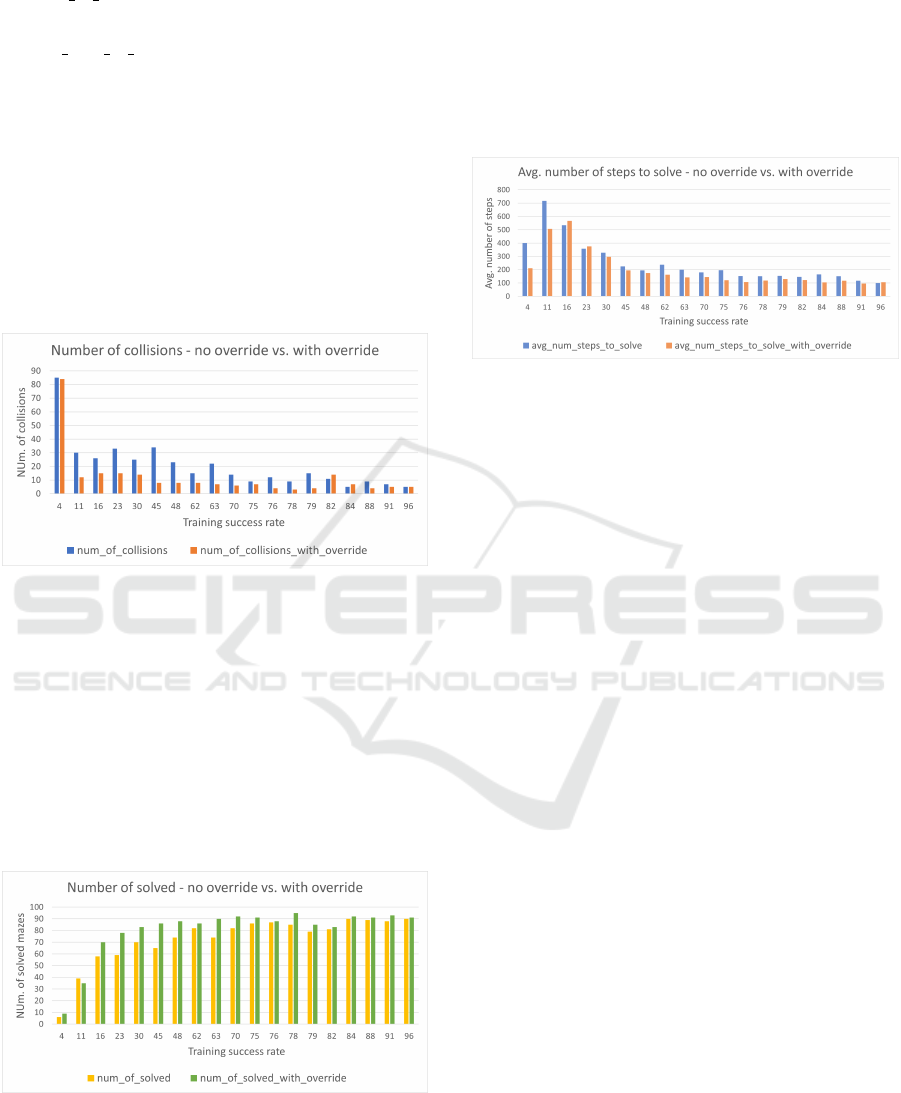
• num of collision: the number of times the agent
collided with an obstacle.
• avg num of steps: the average number of steps
the agent performed in a successful navigation.
We then repeated this setting with the CONSERVA-
TIVEACTION scenario enabled.
The experiment’s results are summarized in
Fig. 12, and show that enabling the override rule
leads to a significant reduction in the number of col-
lisions. We notice that, as the agent’s success rate in-
creases, the improvement rate decreases. One hypoth-
esis for this behavior could be that “stronger” mod-
els are more confident in their recommended actions,
thus requiring fewer activations of the override rule.
Figure 12: Comparing the number of collisions when the
CONSERVATIVEACTION override is disabled and then en-
abled.
Fig. 13 portrays a general improvement in the
agent’s success rate when the override rule is enabled,
which is (unsurprisingly) correlated with the reduc-
tion in the number of collisions. A possible expla-
nation is that “mediocre” agents, i.e. those with suc-
cess rates in the range between 16% and 70%, learned
policies that are good enough to navigate towards the
target, but which require some assistance in order to
avoid obstacles along the way.
Figure 13: Comparing the num. of solved mazes when the
CONSERVATIVEACTION override is disabled and then en-
abled.
Fig. 14 depicts a reduction in the average num-
ber of steps required for an agent to solve the maze,
when the override scenario is enabled. This somewhat
surprising result indicates that although our agents
can successfully solve mazes, the CONSERVATIVE-
ACTION scenario renders their navigation more effi-
cient. We speculate that for these agents, selecting
actions with low confidence scores leads to redundant
steps.
Figure 14: Comparing the average number of steps to solve
when the CONSERVATIVEACTION override is disabled and
then enabled.
5 INTRODUCING MODIFIER
SCENARIOS
5.1 Motivation
In both of our case studies, we needed to create sce-
narios capable of reasoning about the events being re-
quested in the current time step — which we resolved
by introducing new, “proxy” events. However, such
a solution has several drawbacks. First, it entails ex-
tensive renaming of existing events, and the modifi-
cation of existing scenarios, which goes against the
incremental nature of SBM (Harel et al., 2012). Sec-
ond, once added, the override scenario becomes a cru-
cial component in the O
DNN
infrastructure, without
which the system cannot operate; and in the common
case where the override rule is not triggered, this in-
curs unnecessary overhead. Third, it is unclear how to
support the case where several scenarios are required.
These drawbacks indicate that the “proxy” solution is
complex, costly, and leaves much to be desired.
In order to address this need and allow users to de-
sign override rules in a more convenient manner, we
propose here to extend the idioms of SBM in a way
that will support modifier scenarios: scenarios that
are capable of observing and modifying the current
event, as it is being selected for triggering. A formal
definition appears below.
Enhancing Deep Learning with Scenario-Based Override Rules: A Case Study
263

5.2 Defining Modifier Scenarios
We extend the definitions of SBM from Sec. 2 with
a new type of scenario, named a modifier scenario.
A modifier scenario is formally defined as a tuple
O
modifier
= ⟨Q
M
, q
M
0
, δ
M
, f
M
⟩, where:
• Q
M
is a set of states representing synchronization
points.
• q
M
0
is the initial state.
• δ
M
: Q
M
× E → Q
M
is a deterministic transition
function, indicating how the scenario reacts when
an event is triggered.
• f
M
: Q
M
× 2
E
× 2
E
→ E is a function that maps
a state, a set of observed requested events, and a
set of observed blocked events into an event from
the set E. f
M
can operate in a deterministic, well-
defined manner, or in a randomized manner to se-
lect a suitable event from E.
Intuitively, the modifier thread can use its function f
M
at a synchronization point to affect the selection of the
current event.
Let M = {O
1
, ...,O
n
, O
modifier
} be a behavioral
model, where n ∈ N, each O
i
= ⟨Q
i
, q
i
0
, δ
i
, R
i
, B
i
⟩ is
an ordinary scenario object, and O
modifier
is a mod-
ifier scenario object. In order to define the seman-
tics of M, we construct the labeled transition system
LTS(M) = ⟨Q, q
0
, δ, f
M
⟩, where:
• Q := Q
1
× ... × Q
n
× Q
M
is the set of states.
• q
0
:= ⟨q
1
0
, ...,q
n
0
, q
M
0
⟩ ∈ Q is the initial state.
• f
M
:= f
M
is the modification function of O
modifier
.
• δ : Q × E → Q is a deterministic transition func-
tion, defined for all q = ⟨q
1
, ...,q
n
, q
M
⟩ ∈ Q and
e ∈ E by
δ(q, e) := ⟨δ
1
(q
1
, e), ..., δ
n
(q
n
, e), δ
M
(q
M
, e)⟩
An execution of P is an execution of LTS(M).
The execution starts from the initial state q
0
, and in
each state q ∈ Q, the event selection mechanism col-
lects the sets of requested and blocked events, namely
R(q) :=
n
S
i=1
R
i
(q
i
) and B(q) :=
n
S
i=1
B
i
(q
i
).
The set of enabled events at synchronization point
q is E(q) = R(q)\B(q). If E(q) =
/
0 then the system is
deadlocked. Otherwise, the ESM allows the modifier
scenario to affect event selection, by applying f
M
and
selecting the event:
e = f
M
(q, R(q),B(q)).
The ESM then triggers e, and notifies the relevant
scenarios. By convention, we require that f
M
does
not select an event that is currently blocked; although
it can select events that are not currently requested.
The state of LTS(M) is then updated according to e.
The execution of LT S(M) is formally recorded as a
sequence of triggered events (a run). For simplicity,
we assume that there is a single O
modifier
object in the
model, although in practice it can be implemented us-
ing a collection of scenarios.
5.3 Revised Override Scenarios
We extend the definition of an override rule over a
network N, into a tuple ⟨P, Q, f ⟩, where: (i) P(x)
is a predicate over the network’s input vector x;
(ii) Q(N(x)) is a predicate over the network’s output
vector N(x); and (iii) f : O → O is a function that re-
places the proposed network output event with a new
output event. Using a modifier scenario O
modifier
, we
can now implement this more general form of an over-
ride rule within an SB model. As an illustrative ex-
ample, we change the override rule from Sec. 2.2, to
consider the network’s output as well:
⟨x
1
> x
2
, y
2
> 1, f (y
i
) → y
1
⟩
Note that this definition differs from the origi-
nal: it takes into account the currently selected out-
put event and its value. Also, it contains a function f
that, whenever the predicates hold, maps a network-
selected output into action y
1
. An updated version of
the override rule, implemented as a modifier scenario,
appears in Fig. 15. To support the ability to observe
output event e
o
’s internal value, the event contains a
payload of the calculated output neurons’ values.
Figure 15: An O
modifier
scenario object for enforcing the
override rule that whenever x
1
> x
2
and y
2
> 1, output event
e
o
1
should be triggered. The scenario waits for the input
event to satisfy the predicate, and then proceeds to the state
where it declares a modification. The first argument to the
modification function f is the output event and assignment
that the scenario would like to modify. The second argu-
ment to the function is the set of blocked events: None, in
our case. The return value from the function is the output
event, e
o
1
. At the synchronization point, the ESM collects
the requested and blocked events, applies the f function of
the modifier scenario, and then notifies the relevant scenar-
ios that e
o
1
output event has been selected for triggering.
With the updated override rule definition, we now
refactor the scenarios from Sec. 3.2. First, we re-
store UPDATESENDINGRATE to its original role as
MODELSWARD 2023 - 11th International Conference on Model-Based Software and Systems Engineering
264
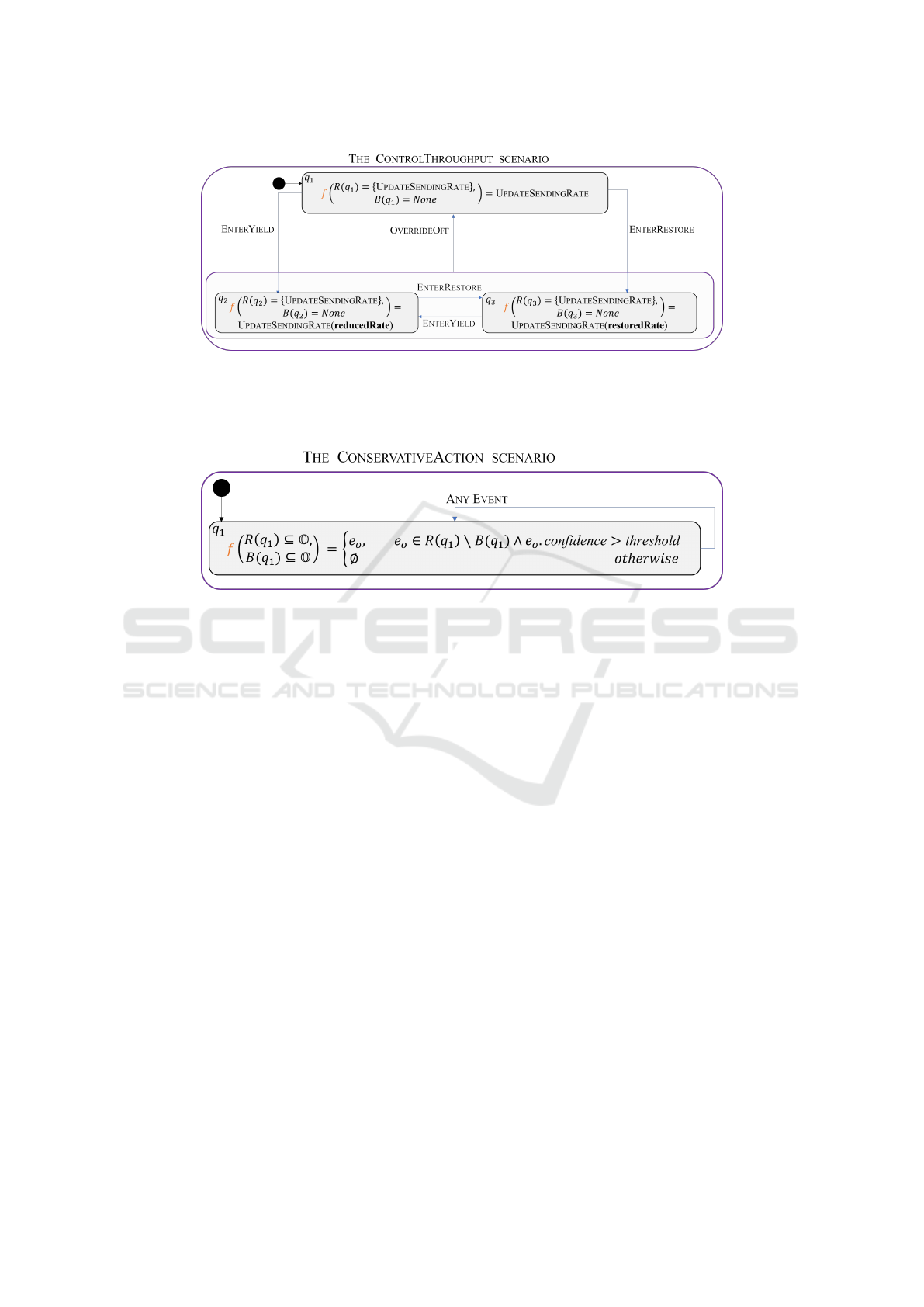
Figure 16: The CONTROLTHROUGHPUT override scenario. The scenario waits-for events
{OVERRIDEOFF,ENTERYIELD,ENTERRESTORE} in each state, and transitions subsequently. It also observes and
possibly modifies the UPDATESENDINGRATE event using its f function depending on the current state q
i
, R(q
i
) and B(q
i
).
E.g., if we are in q
2
, and UPDATESENDINGRATE is requested but not blocked, its value will be modified according to the
reduce policy. Note that the modification of the UPDATESENDINGRATE does not result in a transition to a different state.
Figure 17: The revised CONSERVATIVEACTION scenario. The scenario observes all possible subsets of the output events O
that are requested or blocked at state q
1
. Concretely, at each synchronization point, the ESM launches f with a specific set of
the requested and blocked output events. The function f is only concerned with the set of enabled (requested and not blocked)
output events. From these possible output events, f randomly selects an event e
o
according to this policy: (i) if the selected
event is above the threshold, f passes the event as-is; and (ii) if the selected event is below the threshold, f randomly selects
a different possible output event which is above the threshold. The ESM then notifies the relevant scenarios of the selected
output event. If no such event exists, the program is in a deadlock, in which case the scenario can reduce the threshold to find
a possible event. The scenario remains in its state q
1
whenever any event is triggered.
an output event (as opposed to a proxy event). Sec-
ond, we modify the MONITORNETWORKSTATE sce-
nario to request three events that signal the cur-
rent throughput state: (i) OVERRIDEOFF, which sig-
nals that the sending rate should be forwarded as-
is; and (ii) ENTERYIELD and (iii) ENTERRESTORE,
which signal that the sending rate should be over-
ridden by the yield/restore policy. Third, we in-
troduce the CONTROLTHROUGHPUT override sce-
nario, replacing REDUCETHROUGHPUT and RE-
STORETHROUGHPUT. This scenario waits-for a sig-
nal on the current throughput state, and transitions be-
tween the internal states that represent it. The sce-
nario uses function f to observe the requested event
UPDATESENDINGRATE in each state. When the
output event UPDATESENDINGRATE is requested, f
is executed and receives the requested and blocked
events as parameters. If the event is blocked, we are
in a deadlock. If the scenario is in the OVERRIDEOFF
state, the function returns the event as-is. If the sce-
nario is in the ENTERYIELD/ ENTERRESTORE states,
the scenario returns an UPDATESENDINGRATE event
with a sending rate that is modified according to
the matching policy. The revised UPDATESENDIN-
GRATE event is then triggered, and all relevant sce-
narios proceed with their execution. Fig. 16 depicts
the new CONTROLTHROUGHPUT scenario.
We now revise the set of scenarios we imple-
mented to support the TRL project 4 and the conser-
vative override rule 4.2. The first modification is to
restore the OUTPUTEVENT event to its original role
as an output, instead of a proxy event. We then use the
f function to simplify the CONSERVATIVEACTION
scenario. Recall that originally, the scenario waited
for the INPUTEVENT, for the purpose of re-playing
the O
DNN
evaluation if the selected OUTPUTEVENT
was below the threshold. The revised scenario can
define an f that will observe the set of requested out-
put events, and then randomly select an output event
that exceeds the threshold, and which is not blocked.
If there are no possible output events, the system is
deadlocked. From a practical point of view, the sce-
Enhancing Deep Learning with Scenario-Based Override Rules: A Case Study
265

nario can reduce the threshold to avoid this situation
(assuming that R(q) \ B(q) is not empty). Fig. 17 dis-
plays the revised CONSERVATIVEACTION scenario.
In summary, we have successfully revised the
override rules from our two case studies utilizing the
O
modifier
extension. First, this new and more power-
ful definition has enabled us to implement the rules
without “proxy” events. This change reduces the high
coupling between the scenarios of the original im-
plementation. Second, the redesigned models offer
a more compact and direct approach: (i) the two over-
ride rules from the Aurora case study were reduced
to a single scenario; and (ii) the TRL override rule
contains a single synchronization point. These char-
acteristics are more in line with the SBM spirit that
views scenarios as simple and self-contained compo-
nents. Moving forward, we plan to enhance the exist-
ing SBM packages with the O
modifier
extension.
6 RELATED WORK
Override rules are becoming an integral part of many
DRL-based systems (Katz, 2020). The concept is
closely related to that of shields and runtime moni-
tors, which have been extensively used in the field
of robotics (Phan et al., 2017), drones (Desai et al.,
2018), and many others (Hamlen et al., 2006; Falcone
et al., 2011; Schierman et al., 2015; Ji and Lafortune,
2017; Wu et al., 2018). We regard our work as an-
other step towards the goal of effectively creating, and
maintaining, override rules for complex systems.
Although our focus here has been on designing
override rules using SBM, other modeling formalisms
could be used just as well. Notable examples in-
clude the publish-subscribe framework (Eugster et al.,
2003), aspect oriented programming (Kiczales et al.,
1997), and the BIP formalism (Bliudze and Sifakis,
2008). A key property of SBM, which seems to ren-
der it a good fit for override rules, is the native idiom
support for blocking events (Katz, 2020); although
similar support could be obtained, using various con-
structs, in other formalisms.
7 CONCLUSION
As DNNs are increasingly being integrated into com-
plex systems, there is a need to maintain, extend and
adjust them — which has given rise to the creation
of override rules. In this work, we sought to con-
tribute to the ongoing effort of facilitating the creation
of such rules, through two extensive case studies. Our
efforts exposed a difficulty in an existing, SBM-based
method for designing guard rules, which we were then
able to mitigate by extending the SBM framework it-
self. We hope that this effort, and others, will give rise
to formalisms that are highly equipped for supporting
engineers in designing override rules for DNN-based
systems.
ACKNOWLEDGEMENTS
We thank the anonymous reviewers for their insight-
ful comments. This work was partially supported
by the Israeli Smart Transportation Research Center
(ISTRC).
REFERENCES
Amsters, R. and Slaets, P. (2019). Turtlebot 3 as a Robotics
Education Platform. In Proc. 10th Int. Conf. on
Robotics in Education (RiE), pages 170–181.
Ashrov, A., Gordon, M., Marron, A., Sturm, A., and
Weiss, G. (2017). Structured Behavioral Program-
ming Idioms. In Proc. 18th Int. Conf. on Enterprise,
Business-Process and Information Systems Modeling
(BPMDS), pages 319–333.
Ashrov, A. and Katz, G. (2023). Enhancing Deep
Learning with Scenario-Based Override Rules
— Code Base. https://github.com/adielashrov/
Enhance-DL-with-SBM-Modelsward2023.
Ashrov, A., Marron, A., Weiss, G., and Wiener, G. (2015).
A Use-Case for Behavioral Programming: an Archi-
tecture in JavaScript and Blockly for Interactive Ap-
plications with Cross-Cutting Scenarios. Science of
Computer Programming, 98:268–292.
Avni, G., Bloem, R., Chatterjee, K., Henzinger, T.,
Konighofer, B., and Pranger, S. (2019). Run-Time
Optimization for Learned Controllers through Quan-
titative Games. In Proc. 31st Int. Conf. on Computer
Aided Verification (CAV), pages 630–649.
Bar-Sinai, M., Weiss, G., and Shmuel, R. (2018a). BPjs—
a Framework for Modeling Reactive Systems using a
Scripting Language and BP. Technical Report. http:
//arxiv.org/abs/1806.00842.
Bar-Sinai, M., Weiss, G., and Shmuel, R. (2018b). BPjs:
an Extensible, Open Infrastructure for Behavioral Pro-
gramming Research. In Proc. 21st ACM/IEEE Int.
Conf. on Model Driven Engineering Languages and
Systems (MODELS), pages 59–60.
Bliudze, S. and Sifakis, J. (2008). A Notion of Glue Ex-
pressiveness for Component-Based Systems. In Proc.
19th Int. Conf. on Concurrency Theory (CONCUR),
pages 508–522.
Bojarski, M., Del Testa, D., Dworakowski, D., Firner, B.,
Flepp, B., Goyal, P., Jackel, L., Monfort, M., Muller,
U., Zhang, J., Zhang, X., Zhao, J., and Zieba, K.
(2016). End to End Learning for Self-Driving Cars.
Technical Report. http://arxiv.org/abs/1604.07316.
MODELSWARD 2023 - 11th International Conference on Model-Based Software and Systems Engineering
266

Collobert, R., Weston, J., Bottou, L., Karlen, M.,
Kavukcuoglu, K., and Kuksa, P. (2011). Natural Lan-
guage Processing (almost) from Scratch. Journal of
Machine Learning Research, 12:2493–2537.
Contributors, W. (2022a). TCP Slow start — Wikipedia,
The Free Encyclopedia. https://en.wikipedia.org/wiki/
TCP congestion control#Slow start.
Contributors, W. (2022b). Wall follower — Maze-
solving algorithm — Wikipedia, The Free Encyclo-
pedia. https://en.wikipedia.org/wiki/Maze-solving
algorithm#Wall follower.
Corsi, D., Yerushalmi, R., Amir, G., Farinelli, A., Harel,
D., and Katz, G. (2022a). Constrained Reinforcement
Learning for Robotics via Scenario-Based Program-
ming. Technical Report. https://arxiv.org/abs/2206.
09603.
Corsi, D., Yerushalmi, R., Amir, G., Farinelli, A., Harel,
D., and Katz, G. (2022b). Constrained Reinforce-
ment Learning for Robotics via Scenario-Based Pro-
gramming — Code Base. https://github.com/d-corsi/
ScenarioBasedRL.
Desai, A., Ghosh, S., Seshia, S. A., Shankar, N., and Tiwari,
A. (2018). Soter: Programming Safe Robotics System
using Runtime Assurance. Technical Report. http://
arxiv.org/abs/1808.07921.
Dong, M., Li, Q., Zarchy, D., Godfrey, P. B., and Schapira,
M. (2015). {PCC}: Re-Architecting Congestion Con-
trol for Consistent High Performance. In Proc. 12th
USENIX Symposium on Networked Systems Design
and Implementation (NSDI), pages 395–408.
Dong, M., Meng, T., Zarchy, D., Arslan, E., Gilad, Y.,
Godfrey, B., and Schapira, M. (2018). PCC Vivace:
Online-Learning Congestion Control. In Proc. 15th
USENIX Symposium on Networked Systems Design
and Implementation (NSDI), pages 343–356.
Elyasaf, A. (2021). Context-Oriented Behavioral Pro-
gramming. Information and Software Technology,
133:106504.
Eugster, P., Felber, P., Guerraoui, R., and Kermarrec, A.-M.
(2003). The Many Faces of Publish/Subscribe. ACM
Computing Surveys (CSUR), 35(2):114–131.
Falcone, Y., Mounier, L., Fernandez, J., and Richier, J.
(2011). Runtime Enforcement Monitors: Compo-
sition, Synthesis, and Enforcement Abilities. Jour-
nal on Formal Methods in System Design (FMSD),
38(3):223–262.
Goodfellow, I., Bengio, Y., and Courville, A. (2016). Deep
learning. MIT press.
Gordon, M., Marron, A., and Meerbaum-Salant, O. (2012).
Spaghetti for the Main Course? Observations on
the Naturalness of Scenario-Based Programming. In
Proc. 17th Conf. on Innovation and Technology in
Computer Science Education (ITICSE), pages 198–
203.
Hamlen, K., Morrisett, G., and Schneider, F. (2006).
Computability Classes for Enforcement Mechanisms.
ACM Transactions on Programming Languages and
Systems (TOPLAS), 28(1):175–205.
Harel, D. (1986). A Visual Formalism for Complex Sys-
tems. Science of Computer Programming, 8(3).
Harel, D., Kantor, A., and Katz, G. (2013). Relaxing Syn-
chronization Constraints in Behavioral Programs. In
Proc. 19th Int. Conf. on Logic for Programming, Arti-
ficial Intelligence and Reasoning (LPAR), pages 355–
372.
Harel, D. and Katz, G. (2014). Scaling-Up Behavioral Pro-
gramming: Steps from Basic Principles to Applica-
tion Architectures. In Proc. 4th SPLASH Workshop
on Programming based on Actors, Agents and Decen-
tralized Control (AGERE!), pages 95–108.
Harel, D., Katz, G., Lampert, R., Marron, A., and Weiss, G.
(2015a). On the Succinctness of Idioms for Concur-
rent Programming. In Proc. 26th Int. Conf. on Con-
currency Theory (CONCUR), pages 85–99.
Harel, D., Katz, G., Marelly, R., and Marron, A. (2016).
An Initial Wise Development Environment for Behav-
ioral Models. In Proc. 4th Int. Conf. on Model-Driven
Engineering and Software Development (MODEL-
SWARD), pages 600–612.
Harel, D., Katz, G., Marelly, R., and Marron, A. (2018).
Wise Computing: Toward Endowing System Devel-
opment with Proactive Wisdom. IEEE Computer,
51(2):14–26.
Harel, D., Katz, G., Marron, A., and Weiss, G. (2014). Non-
Intrusive Repair of Safety and Liveness Violations in
Reactive Programs. Transactions on Computational
Collective Intelligence (TCCI), 16:1–33.
Harel, D., Katz, G., Marron, A., and Weiss, G. (2015b). The
Effect of Concurrent Programming Idioms on Veri-
fication. In Proc. 3rd Int. Conf. on Model-Driven
Engineering and Software Development (MODEL-
SWARD), pages 363–369.
Harel, D., Marron, A., and Sifakis, J. (2022). Creating
a Foundation for Next-Generation Autonomous Sys-
tems. IEEE Design & Test.
Harel, D., Marron, A., and Weiss, G. (2010). Programming
Coordinated Behavior in Java. In Proc. European
Conf. on Object-Oriented Programming (ECOOP),
pages 250–274.
Harel, D., Marron, A., and Weiss, G. (2012). Behav-
ioral programming. Communications of the ACM,
55(7):90–100.
Jay, N., Rotman, N., Godfrey, B., Schapira, M., and Tamar,
A. (2019). A Deep Reinforcement Learning Per-
spective on Internet Congestion Control. In Proc.
Int. Conf. on Machine Learning (ICML), pages 3050–
3059.
Ji, Y. and Lafortune, S. (2017). Enforcing Opacity by Pub-
licly Known Edit Functions. In Proc. 56th IEEE An-
nual Conf. on Decision and Control (CDC), pages 12–
15.
Julian, K., Lopez, J., Brush, J., Owen, M., and Kochender-
fer, M. (2016). Policy Compression for Aircraft Col-
lision Avoidance Systems. In Proc. IEEE/AIAA 35th
Digital Avionics Systems Conference (DASC), pages
1–10.
Jumper, J., Evans, R., Pritzel, A., Green, T., Figurnov,
M., Ronneberger, O., Tunyasuvunakool, K., Bates, R.,
ˇ
Z
´
ıdek, A., Potapenko, A., et al. (2021). Highly Accu-
Enhancing Deep Learning with Scenario-Based Override Rules: A Case Study
267

rate Protein Structure Prediction with Alphafold. Na-
ture, 596(7873):583–589.
Katz, G. (2013). On Module-Based Abstraction and Re-
pair of Behavioral Programs. In Proc. 19th Int. Conf.
on Logic for Programming, Artificial Intelligence and
Reasoning (LPAR), pages 518–535.
Katz, G. (2020). Guarded Deep Learning using Scenario-
Based Modeling. In Proc. 8th Int. Conf. on
Model-Driven Engineering and Software Develop-
ment (MODELSWARD), pages 126–136.
Katz, G. (2021a). Augmenting Deep Neural Networks
with Scenario-Based Guard Rules. Communica-
tions in Computer and Information Science (CCIS),
1361:147–172.
Katz, G. (2021b). Behavioral Programming in C++. https:
//github.com/adielashrov/bpc.
Katz, G., Marron, A., Sadon, A., and Weiss, G. (2019).
On-the-Fly Construction of Composite Events in
Scenario-Based Modeling Using Constraint Solvers.
In Proc. 7th Int. Conf. on Model-Driven Engineering
and Software Development (MODELSWARD), pages
143–156.
Kiczales, G., Lamping, J., Mendhekar, A., Maeda, C.,
Lopes, C., Loingtier, J.-M., and Irwin, J. (1997).
Aspect-Oriented Programming. In Proc. European
Conf. on Object-Oriented Programming (ECOOP),
pages 220–242.
Marchesini, E. and Farinelli, A. (2020). Discrete Deep
Reinforcement Learning for Mapless Navigation. In
Proc. IEEE Int. Conf. on Robotics and Automation
(ICRA), pages 10688–10694.
Marron, A., Hacohen, Y., Harel, D., M
¨
ulder, A., and Ter-
floth, A. (2018). Embedding Scenario-based Model-
ing in Statecharts. In Proc. 21st ACM/IEEE Int. Conf.
on Model Driven Engineering Languages and Systems
(MODELS), pages 443–452.
Meng, T., Jay, N., and Godfrey, B. (2020a). Performance-
Oriented Congestion Control. https://github.com/
PCCproject/PCC-Uspace/tree/deep-learning.
Meng, T., Schiff, N., Godfrey, P., and Schapira, M. (2020b).
PCC Proteus: Scavenger Transport and Beyond. In
Proc. Conf. of the ACM Special Interest Group on
Data Communication on the Applications, Technolo-
gies, Architectures, and Protocols for Computer Com-
munication (SIGCOMM), pages 615–631.
Mnih, V., Kavukcuoglu, K., Silver, D., Graves, A.,
Antonoglou, I., Wierstra, D., and Riedmiller, M.
(2013). Playing Atari with Deep Reinforcement
Learning. Technical Report. http://arxiv.org/abs/1312.
5602.
Nair, V. and Hinton, G. (2010). Rectified Linear Units Im-
prove Restricted Boltzmann Machines. In Proc. Int.
Conf. on Machine Learning (ICML).
Nandkumar, C., Shukla, P., and Varma, V. (2021). Sim-
ulation of Indoor Localization and Navigation of
Turtlebot 3 using Real Time Object Detection. In
Proc. Int. Conf. on Disruptive Technologies for Multi-
Disciplinary Research and Applications (CENTCON),
pages 222–227.
Papernot, N., McDaniel, P., Goodfellow, I., Jha, S., Celik,
Z., and Swami, A. (2017). Practical Black-Box At-
tacks against Machine Learning. In Proc. 12th ACM
Asia Conf. on Computer and Communications Secu-
rity (ASIACCS), pages 506–519.
Phan, D., Yang, J., Grosu, R., Smolka, S., and Stoller, S.
(2017). Collision Avoidance for Mobile Robots with
Limited Sensing and Limited Information about Mov-
ing Obstacles. Formal Methods in System Design,
51(1):62–86.
Robotis (2023). The Turtlebot3 Burger Mobile Robot.
https://www.roscomponents.com/en/mobile-robots/
214-turtlebot3-burger.html.
ROS (2023). ROS2 — Getting Started. https://www.ros.
org/blog/getting-started/.
Schierman, J., DeVore, M., Richards, N., Gandhi, N.,
Cooper, J., Horneman, K., Stoller, S., and Smolka,
S. (2015). Runtime Assurance Framework Devel-
opment for Highly Adaptive Flight Control Systems.
Technical Report. https://apps.dtic.mil/docs/citations/
AD1010277.
Shalev-Shwartz, S., Shammah, S., and Shashua, A. (2016).
Safe, Multi-Agent, Reinforcement Learning for Au-
tonomous Driving. Technical Report. http://arxiv.org/
abs/1610.03295.
Silver, D., Huang, A., Maddison, C., Guez, A., Sifre, L.,
Van Den Driessche, G., Schrittwieser, J., Antonoglou,
I., Panneershelvam, V., Lanctot, M., et al. (2016).
Mastering the Game of Go with Deep Neural Net-
works and Tree Search. Nature, 529(7587):484–489.
Simonyan, K. and Zisserman, A. (2014). Very Deep Con-
volutional Networks for Large-Scale Image Recog-
nition. Technical Report. http://arxiv.org/abs/1409.
1556.
Steinberg, S., Greenyer, J., Gritzner, D., Harel, D., Katz,
G., and Marron, A. (2018). Efficient Distributed Exe-
cution of Multi-Component Scenario-Based Models.
Communications in Computer and Information Sci-
ence (CCIS), 880:449–483.
Sutton, R. and Barto, A. (2018). Reinforcement Learning:
an Introduction. MIT Press.
Unity (2023). Simulating Robots with ROS and Unity.
https://resources.unity.com/unitenow/onlinesessions/
simulating-robots-with-ros-and-unity.
Wu, Y., Raman, V., Rawlings, B., Lafortune, S., and Seshia,
S. (2018). Synthesis of Obfuscation Policies to Ensure
Privacy and Utility. Journal of Automated Reasoning,
60(1):107–131.
Yaacov, T. (2020). BPPy: Behavioral Programming in
Python. https://github.com/bThink-BGU/BPPy.
Yerushalmi, R., Amir, G., Elyasaf, A., Harel, D., Katz,
G., and Marron, A. (2022). Scenario-Assisted Deep
Reinforcement Learning. In Proc. 10th Int. Conf.
on Model-Driven Engineering and Software Develop-
ment (MODELSWARD), pages 310–319.
MODELSWARD 2023 - 11th International Conference on Model-Based Software and Systems Engineering
268
