
Towards Improved Indoor Location with Unmodified RFID Systems
Rui Santos
1 a
, Ricardo Alexandre
2 b
, Pedro Marques
1 c
, M
´
ario Antunes
1,2 d
,
Jo
˜
ao Paulo Barraca
1,2 e
, Jo
˜
ao Silva
3
and Nuno Ferreira
3
1
DETI, Universidade de Aveiro, Aveiro, Portugal
2
Instituto de Telecomunicac¸
˜
oes, Universidade de Aveiro, Aveiro, Portugal
3
Think Digital, Aveiro, Portugal
Keywords:
Indoor Location, Machine Learning, Passive RFID Tag, Regression Models.
Abstract:
The management of health systems has been one of the main challenges in several European countries, espe-
cially where the aging population is increasing. This led to the adoption of smarter technologies as a means to
automate the processes within hospitals. One of the technologies adopted is active location solutions, which
allows the staff within the hospital to quickly find any sort of entity, from key persons to equipment. In this
work, we focus on developing a reliable method for active location based on RSSI antennas, passive tags, and
ML models. Since the tags are passive, the usage of RSSI is discouraged, since it does not vary sufficiently
based on our experiments. We explored the usage of alternative features, such as the number of activations per
tag within a time slot. Throughout our evaluation, we were able to reach an average error of 0.275 m which is
similar to existing RSSI IPS.
1 INTRODUCTION
The management of health systems and their eco-
nomic viability, especially in western countries where
the aging population is increasingly significant, and
has been one of the main challenges for several Eu-
ropean countries. With an increase in the number
of patients and difficulty in making annual budgets
keep up with this growth. Hospitals, as well as other
clinical centers have been looking for new solutions
that enable them to maximize service efficiency, re-
duce costs and increase patient satisfaction. To auto-
mate these processes some hospitals have started to
adopt active localization technologies through Radio
Frequency Identification (RFID) (Paiva et al., 2018;
Tegou et al., 2018). Using Random Forest (RF) tech-
nologies, it is possible to monitor the movement of pa-
tients through the various hospital sectors, as well as
the location and use of medical equipment, and even
a
https://orcid.org/0000-0003-2157-7602
b
https://orcid.org/0000-0001-8836-0139
c
https://orcid.org/0000-0001-5656-1817
d
https://orcid.org/0000-0002-6504-9441
e
https://orcid.org/0000-0002-5029-6191
the stock and supply of medications to patients.
This paper aims to explore solutions based on RF,
for indoor localization of resources. The developed
models have, as requirements, the speed of response,
the accuracy of the location and the lowest volume
of data for each prediction (minimizing the electrical
consumption by parts of the RFID radios). The work
described is part of a research project aiming for a
low-cost indoor location system using commonly ac-
quired RFID antennas and tags.
Ideally one would use RFID based technology
for developing an Indoor Positioning System (IPS).
However, during our experiments RFID technology
with passive tags did not produce enough information
for developing an accurate IPS. The main outcome
of this work is the exploration of alternative features,
that can be used to develop IPS with accuracy levels
similar to traditional ones based on RFID.
The remaining document is organized as follows.
section 2 described the current state of the art for ac-
tive indoor location. The following section (section 3)
describes the hardware used in the execution of this
study. section 4 presents the proposed solution. We
describe the results of our evaluation on section 5. Fi-
nally, the conclusion can be found on section 6.
156
Santos, R., Alexandre, R., Marques, P., Antunes, M., Barraca, J., Silva, J. and Ferreira, N.
Towards Improved Indoor Location with Unmodified RFID Systems.
DOI: 10.5220/0011793700003411
In Proceedings of the 12th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2023), pages 156-163
ISBN: 978-989-758-626-2; ISSN: 2184-4313
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

2 STATE OF THE ART
In the past two decades, IPS have been increasing in
popularity, due to the wide range of technologies and
value they can provide to multiple business areas.
There are multiple techniques used in location
systems, such as multilateration (Carotenuto et al.,
2019), angulation (Pom
´
arico-Franquiz et al., 2014),
fingerprinting (Suroso et al., 2021) and others. These
techniques require some information provided by
the antennas and tags used, like the Time of Ar-
rival (ToA) (Shen et al., 2014), Angle of Arrival
(AoA) (Xiong and Jamieson, 2013) and Received
Signal Strength Indication (RSSI) (Hightower et al.,
2001). The tags used in these systems can be active
or passive.
SpotON (Hightower et al., 2001) is a location sys-
tem that uses RSSI to locate active RFID tags in a
three-dimensional space. LANDMARC (Ni et al.,
2003) is a system that also reflects the relationship
between RSSI and power levels and makes use of ref-
erence tags and the K-NN algorithm to estimate the
positions. It has an accuracy of 2 m and a location
delay of 7.5 s. In (Suroso et al., 2021) Dwi et al. pro-
pose a fingerprinting based positioning system using
a RF algorithm and RSSI data, which achieved an er-
ror of 0.5 m, which is 18% lower than the compared
Euclidean distance method. In (Chanama and Wong-
wirat, 2018), Lummanee et al. compare the perfor-
mance of a Gradient Boosting algorithm to a typical
Decision Tree (DT) applied in a positioning system.
The experiment was based on a 324 m
2
area divided
in 9 zones. The DT based Gradient Boosting algo-
rithm achieved an estimation error of 0.754 m for 19
reference radio signals at 50 samples per zone, 17.8%
more accurate than the typical DT. In (Choi et al.,
2009) Jae et al. developed a passive RFID based lo-
calization system which uses RSSI information and
reference tags to predict one-dimensional position of
the asset. It achieves an error of 0.2089 m using the
K-NN technique in a 3 m space.
These methods are mainly based on RSSI, which
has the disadvantage of suffering greatly from attenu-
ation due to internal obstacles and dynamic environ-
ments. Unlike SpotON and LANDMARC, the ap-
proach in (Wilson et al., 2007) by Wilson et al. does
not depend on RSSI, however, is based on the same
RSSI principles. This research work is based on pas-
sive RSSI technology. Two scenarios of stationary
and mobile RSSI tags are considered. The method
gives tag count percentages for various signal atten-
uation conditions. The tags are located by recording
characteristic curves of readings under different atten-
uation values at multiple locations in an environment.
Similarly, Vorst et al. (Vorst et al., 2008) use passive
RFID tags and an onboard reader to locate mobile ob-
jects. Particle Filter (PF) technique is exploited to es-
timate the location from a prior learned probabilistic
model, achieving a precision of 0.20–0.26 m.
3 HARDWARE DESCRIPTION
Given the setting where this work has developed, the
hardware was pre-selected. The hardware consists of
two units (processing + radio), that communicate with
each other through a physical bus (RS232, RS485 or
Ethernet). The local processing unit was designed
to have Long Term Evolution (LTE) and Ethernet
communications support, a 230 V Alternating Cur-
rent (AC) power supply and an Advanced RISC Ma-
chine (ARM) processor running a GNU/Linux oper-
ating system with low power consumption. The an-
tenna model is quite common and is used as provided
by the manufacturer without any custom firmware.
The use of unmodified hardware increases the usabil-
ity and availability of the system while reducing its
price. The drawback is that the antenna processing
capabilities or the information that it reports may be
sub-optimal. According to the manufacturer there is
an automatic gain compensation done at the firmware
level. This is done to allows the detection of the pas-
sive tags. The work we present aims at bringing value
by providing an effective solution, even with unmod-
ified hardware.
Figure 1 presents the smart antenna module used
as well as RFID tags.
The communication between the antenna and the
tags is made through a carrier wave in the 865–
868 MHz (Ultra High Frequency (UHF)) frequency
range as defined in the EN 302 208 v3.2.0
1
direc-
tive for the European region, and cannot exceed 2 W
emission power. In this way, the antenna controller
allows the RF emission power adjustment 0–300 mW,
allowing readings up to 25 m and writings up to 6 m
according to the manufacturer. The antenna polariza-
tion is circular with a gain of 12 dBi. The controller
uses the Impinj R2000 chipset supporting the EPC C1
GEN2 protocol
2
, ISO18000-6C
3
(see Table 1). This
setup should be one of the most commonly used, as
the hardware and chipset are very popular. We see
this as a major contribution from our work, as the out-
put can be applied to a wide set of existing or future,
1
https://www.etsi.org/deliver/etsi en/302200 302299/
302208/03.02.00 20/en 302208v030200a.pdf
2
https://www.gs1.org/standards/rfid/uhf-air-interface-p
rotocol
3
https://www.iso.org/standard/59644.html
Towards Improved Indoor Location with Unmodified RFID Systems
157
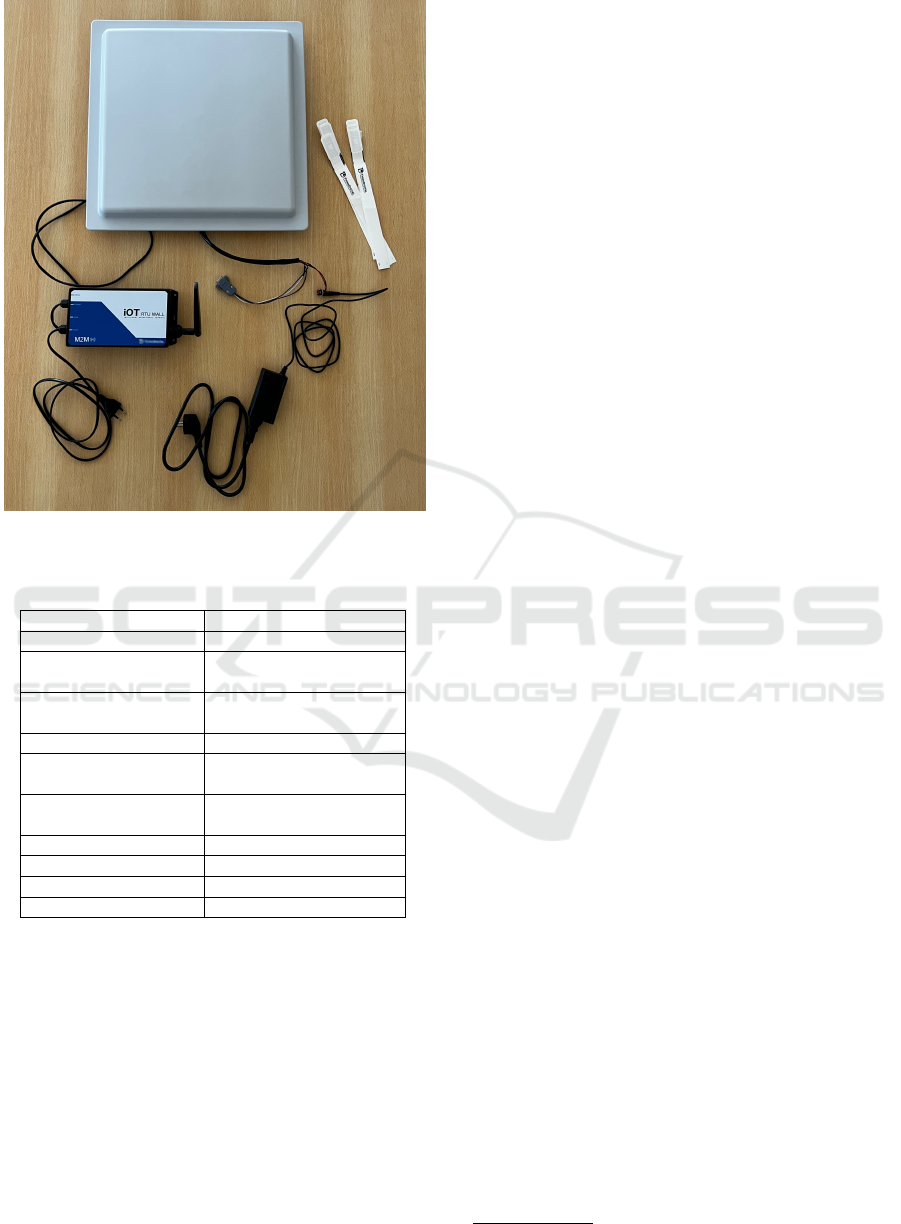
Figure 1: Smart Antenna and passive RFID tags used for
data gathering.
Table 1: Specification of the RFID UHF reader and writer.
Product Parameter Parameter Description
Model ACM818A UHF (20M)
Tag Protocol EPC C1 GEN2 /
ISO 18000-6C
Output Power Step interval 1.0dB,
maximum +30dBm
RF Power Output 0.1W - 1W
Built- in Antenna 12dbi linear polarization
Type antenna
Communication Ports 1)RS-232 2)RS-485
3)Wiegand 26 \ 32 bits
Communication Rates 115200bps
Reading/Writing 20m
Multi-tags Reading 200tags/s
Working Voltage DC +12V
deployments.
The real-time communication with the smart an-
tenna is achieved using an MQTT broker, over which
we implemented several control functions: a) Defini-
tion of emission power of the antenna; b) Tag reading
request over a time window (burst); c) Return data ob-
tained at the end of the reading; d) Direct interaction
with an antenna to manage it.
4 PROPOSED SOLUTION
The goal of the Machine Learning (ML) models pro-
posed in this work is to estimate the distance between
the passive tag and the antenna, based on the differ-
ent features collected. This problem can be modelled
as a traditional regression model, the following mod-
els were selected since they represent well-established
and widely used models in the community: i) K-N-
earest Neighbors ii) Decision Tree iii) Random For-
est iv) Support Vector Regressor v) Gradient Boosting
Regressor
The solution was implemented using the Scikit-
learn
4
library, which is a very popular and robust tool
for RF and statistical modelling in Python. It is im-
portant to mention that we used the default hyperpa-
rameters of each method unless stated in the following
subsections.
The first step consists of the analysis and prepa-
ration of the data gathered from the antenna. The
initial solution was developed using single RSSI val-
ues as the input. The features were normalized using
the MinMaxScaler normalization technique. After the
normalization step, the multiple regression algorithms
were trained and evaluated. The output is the distance
(in meters) between the antenna and the RFID tag.
The architecture of the solution is described by Fig-
ure 2.
It is important to mention that the following exper-
iments were conducted in an isolated environment to
ensure the validity of the results. The following sub-
sections present the multiple experiments conducted
in the pursuit of a viable IPS, which is achieved by de-
termining and characterizing the most adequate fea-
tures present in the RFID system.
4.1 Experiment 1
The first experimental procedure involved data cap-
ture, using a passive RFID tag placed at several dis-
tances from the RF antenna, obtaining the RSSI val-
ues. Readings were performed from 0.5 m to 5 m,
with 0.5 m increments (distance between the RF an-
tenna and the RFID tag), using different values of
emission power, from 100 mW to 300 mW, during a
predefined time interval of 60 seconds (see Figure 3).
From the result of this first experimental proce-
dure, it can be observed that the measured RSSI val-
ues are not proportional to the known distance val-
ues for each reading interval. This happens because
the RF antenna, by default, performs an automatic
compensation of the emission power gains, which
translates into constant average values, unrelated to
4
https://scikit-learn.org/
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
158
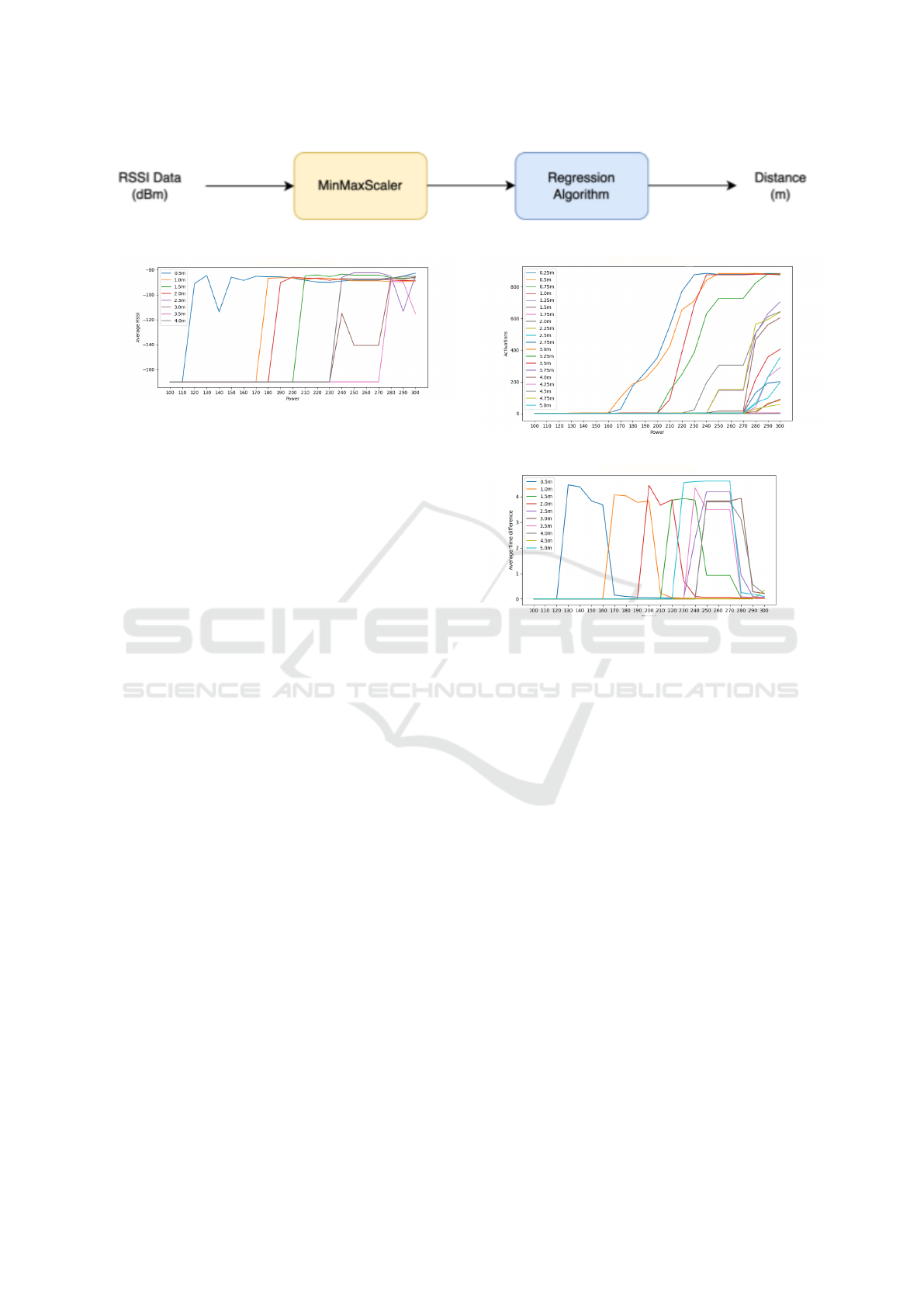
Figure 2: Architecture of the first ML solution based on RSSI data.
Figure 3: Average RSSI values from different power levels
and distances.
the known distance values for the passive RFID tags
arranged on site. This strongly diverges from the
vendor-provided information and should be consid-
ered with great care by other researchers. It also
makes it unfeasible to apply ML models over the
RSSI values provided by the hardware.
Due to the fact described above, it was decided
to proceed with the hardware characterization study,
seeking to obtain new feature sets that vary in a mean-
ingful way with the distance. This will be important
for other researchers, as the features can be replicated
over other types of hardware.
4.2 Experiment 2
The second experimental procedure was performed in
the same way as the first one, that is, through emission
power scans, between 100 mW and 300 mW. How-
ever, in this case, during shorter pre-defined time in-
tervals (20 seconds), for distance values from 0.25 m
to 5 m, with increments of 0.25 m (distance between
the RF antenna and the RFID tag). The following hy-
pothesis was formulated:
Hypothesis 1. For the same emission power value,
the number of activations registered by the antenna
decreases as the distance increases.
From this second procedure the following results
were obtained (see Figure 4):
By observing Figure 4a, there is a clear increase
in the number of activations as the emission power
increases. It can also be seen that the number of ac-
tivations decreases as the distance increases, for each
power value, validating Hypothesis 1. It can be no-
ticed that the relations are not constant, since the tag
presents a higher number of activations at a distance
of 1 m than at 0.75 m between the powers 220 mW
(a) Number of activations in function of power and distance.
(b) Average time delta between activations in function of
power and distance.
Figure 4: The results for the second experiment.
and 280 mW. This behaviour could be explained by
possible external factors. It can be noted that similarly
to the previous experiment, the number of activations
was purposely kept constant when the power is equal
to 260 mW and 270 mW since the antenna did not reg-
ister activations at these powers.
Figure 4b represents the average time between ac-
tivations (in seconds) for each power and distance
considered. Time peaks between activations can be
verified for each distance as the power increases.
Since, for a given distance, there are no activations
up to a given power (160 mW for distance 1.0 m), the
average time between activations has been forcefully
set to 0. After activations occur at the first few power
levels, this time rises substantially, reaching a peak.
As the emission power increases, there is a decrease
in the average time between activations. It is thus ver-
ified that these peaks occur at higher powers as the
distance increases.
After verifying the experimental results, a second
ML solution was developed to predict the tag distance
from the antenna, according to the number of activa-
tions and the average time between activations, per
scan. However, in this experiment, 10 iterations were
Towards Improved Indoor Location with Unmodified RFID Systems
159
performed for each power and distance value. This
way, there is more data available for algorithm devel-
opment, the first 7 iterations for training and the last
3 for testing. A dataset was generated containing 200
readings, 140 for training and 60 for testing. Figure 5
represents the second solution architecture.
Given the available number of power lev-
els, we applied feature reduction technique,
namely SelectKBest
5
with the score function
mutual_info_regression. The 200, 280, 290 and
300 power levels are the ones that result in the lowest
error. Table 2 contains the results of the accuracy
of the models for the power levels considered. The
first three columns represent the error of the models
trained with all the emission power values and the
last two columns represent just the models trained
with the selected power values. The algorithm that
obtained the lowest error (0.00 m) was K-Nearest
Neighbors (K-NN) with k=1. This model obtained
the same optimal performance for all feature groups,
except when these were only the average number
between activations, where the error was the highest
compared to the other algorithms (0.80 m).
The RF algorithm had, in general, a good perfor-
mance, obtaining in almost all cases the second small-
est error besides K-NN, something that was also ver-
ified in the previous experiment. The Support Vec-
tor Regressor (SVR) proved to be the algorithm with
the worst performance, presenting errors constantly
above 0.58 m for the various groups of features.
It can be seen that models trained only with the
mean time between activations obtained the worst
performance, followed by models trained with both
the number of activations and the mean time between
activations.
The models trained with emission powers of 200,
280, 290 and 300 mW obtained a lower error than the
remaining algorithms trained with all powers, espe-
cially when the features are only the number of ac-
tivations. Thus, it can be concluded that the feature
reduction technique applied had a positive impact on
the algorithms’ performance.
Table 2: RMSE (in meters) for the prediction of the distance
between the tag and the antenna for each group of features.
RMSE Activ. Time All Activ. All
(meters) (4 pwr) (4 pwr)
K-NN 0.00 0.80 0.00 0.00 0.00
SVR 0.58 0.69 0.58 0.58 0.59
GBR 0.31 0.63 0.38 0.13 0.24
RF 0.22 0.64 0.29 0.15 0.21
DT 0.24 0.66 0.66 0.18 0.26
5
https://scikit-learn.org/stable/modules/generated/skle
arn.feature selection.SelectKBest.html
4.3 Experiment 3
The third experimental procedure was performed in
a larger space, using one dynamic RFID tag and 9
static RFID tags (as references), placed from 1.0 m
to 9 m from the RF antenna (spaced 1 m each). The
emission powers considered in this procedure were
only those that obtained better readings in the previ-
ous procedures, which were 280, 290 and 300 mW,
for distance values from 0.5 m to 10 m, with 0.5 m in-
crements (distance between the RF antenna and the
RFID tag). From this procedure the following graphs
were obtained (see Figure 6):
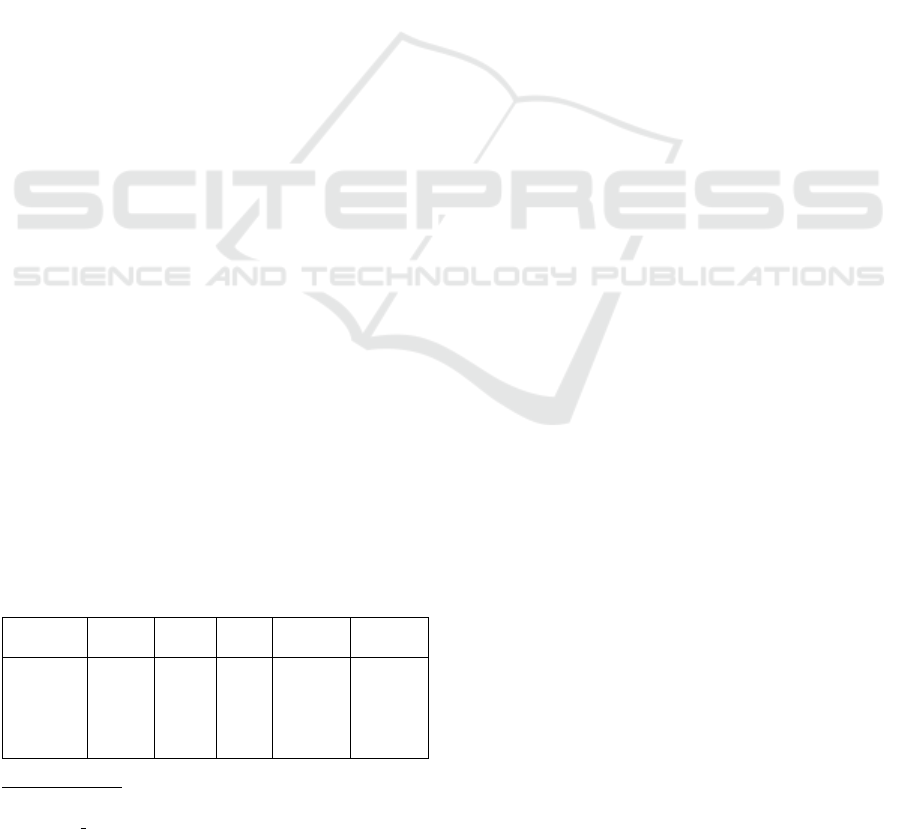
Figure 6a shows a decrease in the number of ac-
tivations over time. It is also noted that the lower
power (280 mW) obtains a higher number of activa-
tions from 1 m to 2 m, which is unexpected but veri-
fied in the previous experiments.
The number of activations falls sharply until a dis-
tance equal to 4 m, remaining low but not equal to 0
until 5 m and recording a peak at 6 m where the acti-
vations reach 30 for the 300 mW power. Afterwards,
this number remained quite low until 9 m and null for
any power at 10 m.
Figure 6b depicts the average time between acti-
vations. In the first distances, the smaller emission
power (280 mW) shows a shorter time between acti-
vations, and this time increases with the increase of
the distance. Although there are no activations for the
powers 280 mW and 290 mW starting at 6 m, the pre-
processing applied to the time between activations
makes this number remain high, thus maintaining the
relationship with the distance.
The graphs presented in Figure 7 show the differ-
ence between the number of activations between the
dynamic tag and the 9 static tags, for each emission
power. It can be seen that, in all graphs, the differ-
ence decreases with distance, as would be expected.
There is a clear relationship between the position of
the static tags and the difference between activations,
as this difference is smaller the closer the static tag is
to the antenna.
In Figure 7a, it can be seen that these remain prac-
tically constant from 4 m on since at this power of
emission there were practically no activations of the
dynamic tag.
5 EVALUATION
Based on the results from the previous experiments
we formulated a second Hypothesis 2:
Hypothesis 2. The difference in the number of activa-
tions between the dynamic tag and the reference tags
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
160
Figure 5: Architecture of the second ML solution based on the number of activations and the average time between activations.
(a) The number of activations for different power levels and
distances.
(b) Average time delta between activations as a function of
power and distance.
Figure 6: The results for the third experiment.
contributes to a performance increase.
A third RF solution was developed using the same
algorithms used in the previous experiments but also
using the difference between the number of activa-
tions. The developed models were trained and tested
using the generated dataset containing 200 readings.
The architecture is described in Figure 8.
The results were recorded in Table 3. The errors
obtained in the tests showed that the models that were
trained with groups of features that included infor-
mation regarding the difference between the number
of activations obtained better performance than those
that did not include this information, validating Hy-
pothesis 2.
Table 3: RMSE (in meters) for the prediction of the distance
between a tag and the antenna, for each group of features.
RMSE Activ. Time Difference All
(meters) between between
activations activations
K-NN 1.19 1.21 0.72 0.72
SVR 1.45 1.26 1.33 1.32
GBR 1.25 0.76 0.84 0.72
RF 1.19 0.85 0.75 0.57
DT 1.48 1.03 1.67 1.08
Several models trained only with the differences
between the number of activations between the dy-
namic tag and the reference tags for each of the three
emission power levels were elaborated. The number
of reference tags and the tags themselves used to train
the algorithms was varied, identifying which combi-
nations result in the lowest error for the various num-
bers considered. The errors for each model tested are
shown in Table 4.
Table 4: RMSE (in meters) for the prediction of the distance
between one tag A and the antenna in experiment 3, using a
set of different reference tags.
RMSE 2 tags 3 tags 4 tags 5 tags All
(meters)
K-NN 0.67 0.60 0.55 0.60 0.72
SVR 1.27 1.37 1.29 1.27 1.33
GBR 0.77 0.76 0.69 0.78 0.84
RF 0.72 0.75 0.72 0.79 0.75
DT 1.08 1.11 1.14 1.74 1.67
Overall, the models that used all the available
features obtained the best performance, followed by
those that used only the difference between the num-
ber of activations. The models trained with only
the average time between activations obtained a per-
formance similar to those that used the difference
between the number of activations, and the models
trained only with the number of activations obtained
the worst performance.
Comparing the different algorithms applied, it can
be seen that SVR obtained the worst performance,
Towards Improved Indoor Location with Unmodified RFID Systems
161
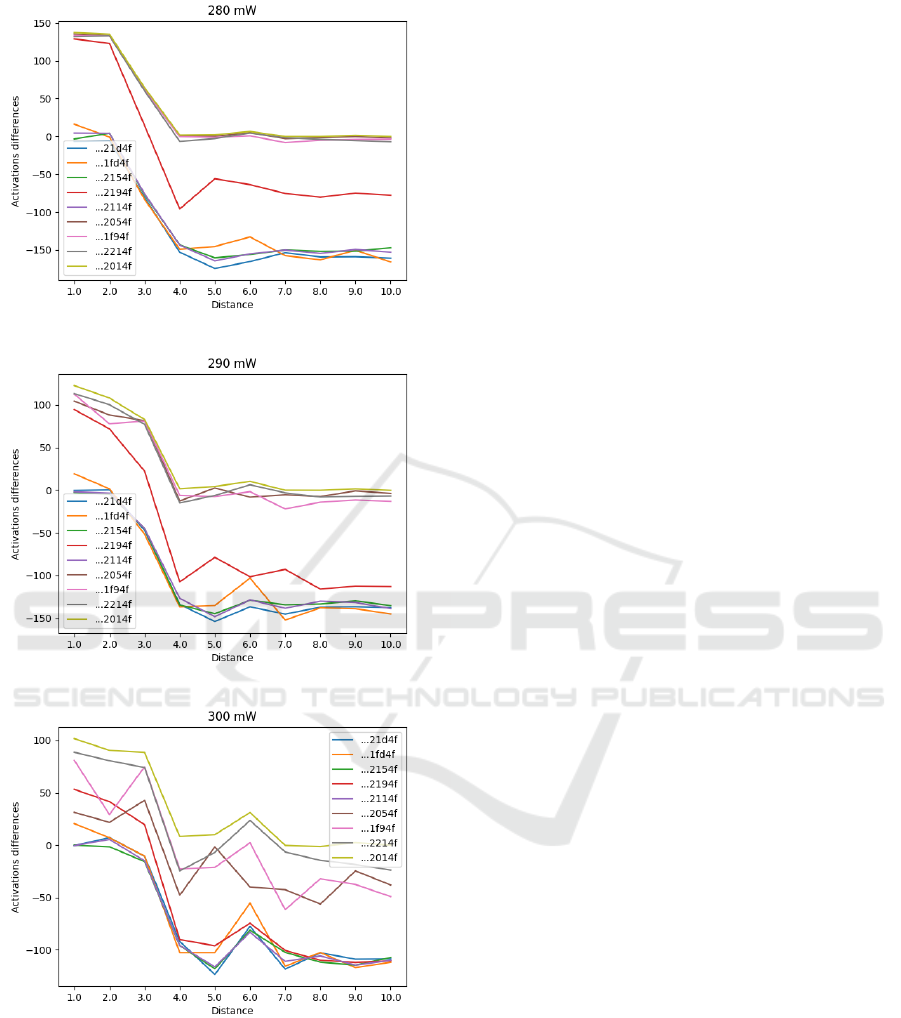
(a) 280 mW.
(b) 290 mW.
(c) 300 mW.
Figure 7: The difference of activations recorded for the dy-
namic RFID tag and the reference tags, by reading interval
(20 seconds), for the 280, 290 and 300 mW powers con-
sidered, at different distances, with 0.5 m increments. The
colours shown in the graph correspond to reference tags
placed from 1.0 to 9.0 metres, respectively.
with an error greater than 1.25 m in all tests. The
DT algorithm also did not obtain a good performance,
since the error was always higher than 1 m. The low-
est error was obtained by the RF algorithm (0.57 m)
which obtained a good performance in several tests.
Through Table 4 it is possible to verify that the
smallest error was 0.55 m, obtained by the K-NN al-
gorithm with k=3, using 4 reference tags at 3, 6, 7 and
9 meters away from the antenna. The Gradient Boost-
ing Regressor (GBR) and RF algorithms also obtained
the best performance using this group of features.
From the results obtained in this experiment, it can
be concluded that the use of static reference tags con-
tributes positively to the development of more accu-
rate models.
6 CONCLUSION
The management of health systems has been one of
the main challenges in several European countries,
especially where the ageing population is increasing.
One of the technologies adopted is active location so-
lutions, which allows the staff within the hospital to
quickly find any sort of entity, from key persons to
equipment.
In this work, we evaluated the usage of dedicated
hardware (namely the RF antenna) for indoor loca-
tion within a medical environment. Our initial test
showed that RSSI was unreliable as a feature for our
specific hardware. This happens because the RF an-
tenna, by default, performs an automatic compensa-
tion of the emission power gains, which translates into
RSSI value that does not change with the distance (for
the passive RFID tags arranged on site).
The main contribution of this work is the usage of
alternative features to overcome this issue and achieve
reasonable accuracy with vanilla hardware. The fi-
nal model uses the number of activation and the aver-
age time between activations from a selected range of
power levels as the features for indoor location.
Comparing the results obtained with the systems
studied in section 2, it is possible to conclude that the
accuracy of the developed models is on par without
using RSSI data. It obtained an error of 0.00 m within
a range of 5 m in the second experiment and an error
of 0.55 m within a range of 10 m in the third exper-
iment, resulting in an average error of 0.275 m. The
approach in (Choi et al., 2009) achieves an error of
0.2089 m but within a shorter space of 3 m using RSSI
data.
These results only serve to present an alternative
set of features for specific hardware, whenever the
typical RSSI metric can not be easily applied. The
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
162
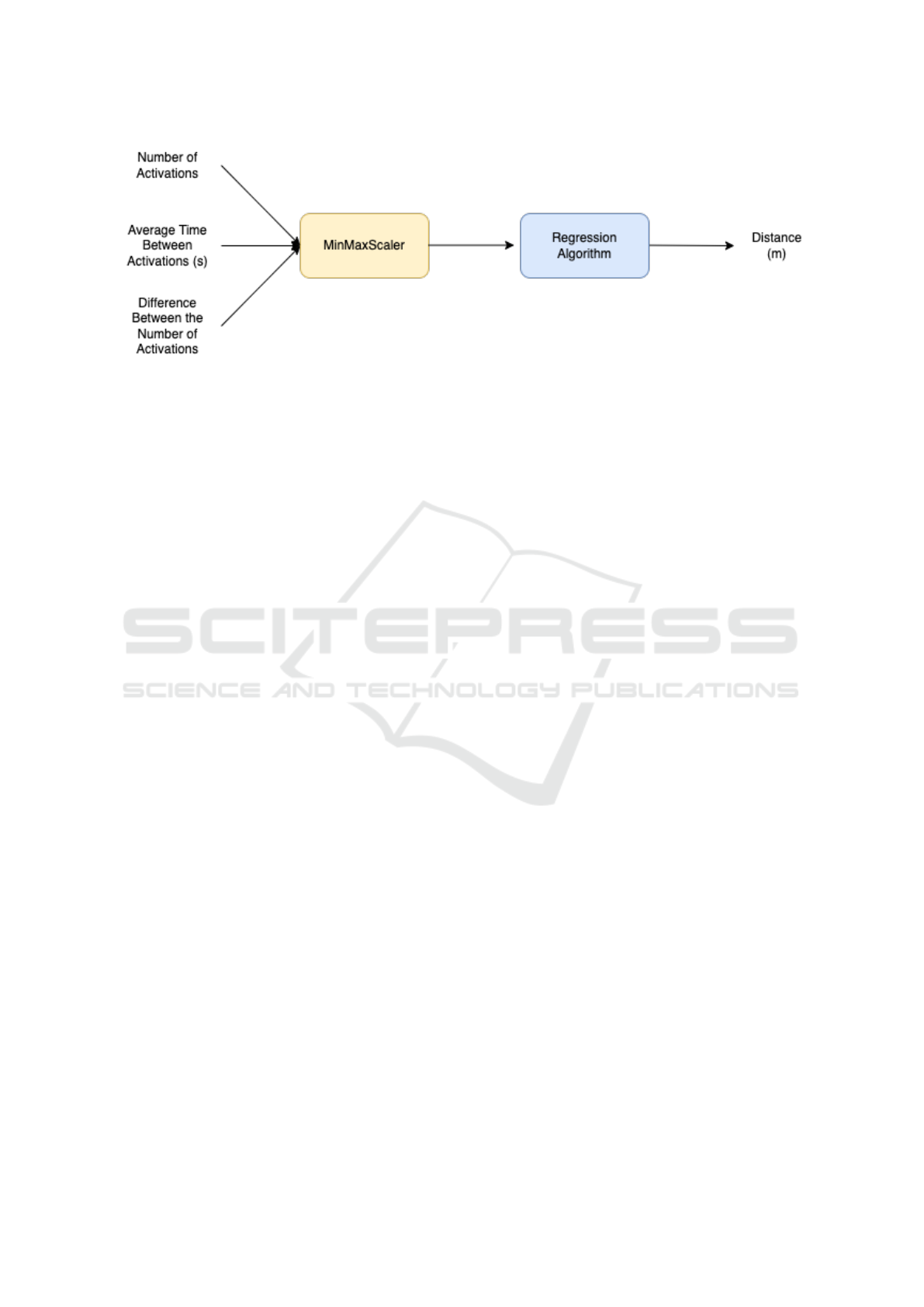
Figure 8: Architecture of the third ML solution based on the number of activations, the average time between activations and
the difference between the number of activations.
proposed features present an adequate level of perfor-
mance. Regardless further testing is required since
the proposed feature can be highly correlated with the
specific hardware, limiting the deployment of generic
location models.
ACKNOWLEDGEMENTS
This work is supported by the European Regional De-
velopment Fund (FEDER), through the Competitive-
ness and Internationalization Operational Programme
(COMPETE 2020) of the Portugal 2020 framework
[Project SDRT with Nr. 070192 (POCI-01-0247-
FEDER-070192)]
REFERENCES
Carotenuto, R., Merenda, M., Iero, D., and Della Corte,
F. G. (2019). An indoor ultrasonic system for au-
tonomous 3-d positioning. IEEE Transactions on In-
strumentation and Measurement, 68(7):2507–2518.
Chanama, L. and Wongwirat, O. (2018). A comparison of
decision tree based techniques for indoor positioning
system. In 2018 International Conference on Infor-
mation Networking (ICOIN), pages 732–737.
Choi, J. S., Lee, H., Elmasri, R., and Engels, D. W. (2009).
Localization systems using passive uhf rfid. In 2009
Fifth International Joint Conference on INC, IMS and
IDC, pages 1727–1732.
Hightower, J., Vakili, C., Borriello, G., and Want, R. (2001).
Design and calibration of the spoton ad-hoc location
sensing system. unpublished, August, 31.
Ni, L., Liu, Y., Lau, Y. C., and Patil, A. (2003). Land-
marc: indoor location sensing using active rfid. In
Proceedings of the First IEEE International Confer-
ence on Pervasive Computing and Communications,
2003. (PerCom 2003)., pages 407–415.
Paiva, S., Brito, D., and Leiva-Marcon, L. (2018). Real time
location systems adoption in hospitals–a review and a
case study for locating assets. Acta Scientific Medical
Sciences, 2(7):02–17.
Pom
´
arico-Franquiz, J., Khan, S. H., and Shmaliy, Y. S.
(2014). Combined extended fir/kalman filtering for
indoor robot localization via triangulation. Measure-
ment, 50:236–243.
Shen, H., Ding, Z., Dasgupta, S., and Zhao, C. (2014). Mul-
tiple source localization in wireless sensor networks
based on time of arrival measurement. IEEE Transac-
tions on Signal Processing, 62(8):1938–1949.
Suroso, D. J., Rudianto, A. S., Arifin, M., and Hawibowo,
S. (2021). Random forest and interpolation techniques
for fingerprint-based indoor positioning system in un-
ideal environment. International Journal of Comput-
ing and Digital Systems.
Tegou, T., Kalamaras, I., Votis, K., and Tzovaras, D.
(2018). A low-cost room-level indoor localization sys-
tem with easy setup for medical applications. In 2018
11th IFIP Wireless and Mobile Networking Confer-
ence (WMNC), pages 1–7.
Vorst, P., Schneegans, S., Yang, B., and Zell, A. (2008).
Self-localization with rfid snapshots in densely tagged
environments. In 2008 IEEE/RSJ International Con-
ference on Intelligent Robots and Systems, pages
1353–1358.
Wilson, P., Prashanth, D., and Aghajan, H. (2007). Utilizing
rfid signaling scheme for localization of stationary ob-
jects and speed estimation of mobile objects. In 2007
IEEE International Conference on RFID, pages 94–
99.
Xiong, J. and Jamieson, K. (2013). ArrayTrack: A Fine-
Grained indoor location system. In 10th USENIX
Symposium on Networked Systems Design and Im-
plementation (NSDI 13), pages 71–84, Lombard, IL.
USENIX Association.
Towards Improved Indoor Location with Unmodified RFID Systems
163
