
How Far Can a Drone be Detected?
A Drone-to-Drone Detection System Using Sensor Fusion
Juann Kim
1 a
, Youngseo Kim
2 b
, Heeyeon Shin
3 c
, Yaqin Wang
4 d
and Eric T. Matson
4
1
Dept. Software, Sangmyung University, Cheonan, Republic of Korea
2
Dept. Human Centered AI, Sangmyung University, Seoul, Republic of Korea
3
Computer Science and Engineering, Kyung Hee University, Yongin, Republic of Korea
4
Computer and Information Technology, Purdue University, West Lafayette, U.S.A.
Keywords:
Drone Detection, Audio Classification, Object Detection, Machine Learning, Deep Learning, Decision
Fusion, Sensor Fusion.
Abstract:
The recent successes of drone detection models show that leveraging the decision fusion of audio-based and
vision-based features can achieve high accuracy, instead of only using unitary features. In this paper, we
propose to estimate how far can a drone be detected in different distances. Drone-to-drone dataset for were
collected separately using a camera and a microphone. The data are evaluated using deep learning and machine
learning techniques to show how far can a drone be detected. Two different types of sensors were used
for collecting acoustic-based features and vision-based features. Convolutional Neural Network (CNN) and
Support Vector Machine (SVM) are utilized with audio-based features, which are Mel-Frequency Cepstral
Coefficients (MFCC) and Log-Mel Spectrogram. YOLOV5 is adopted for visual feature extraction and drone
detection. Ultimately, by using the sensor fusion of both domains of audio and computer vision, our proposed
model achieves high performances in different distances.
1 INTRODUCTION
The application of Unmanned Aerial Vehicles
(UAVs), or drones, is increasing rapidly in diverse
fields including agriculture, construction, technical
service, health care, and delivery systems. The bene-
fits of drones are enormous: operating without a pilot,
applying diverse fields, low-cost infrastructure, and
etc. Especially, Countering Unmanned Aerial Sys-
tem (CUAS) is required to detect and track malicious
drones that approach protected or secure areas. Drone
flights in the Air Exclusion Zone have repeatedly oc-
curred. For instance, a man was detained since he
flew his UAV 100 feet above near the White House
in 2015. (H. Abdullah, 2015) Due to this, the impor-
tance of drone detecting and further drone localiza-
tion comes to the fore. Various domains, including
Radar and Lidar, many types of camera and micro-
phone were applied to drone detection and localiza-
tion.
In this paper, the low-cost sensors, camera and
a
https://orcid.org/0000-0002-0923-0115
b
https://orcid.org/0000-0002-9019-2135
c
https://orcid.org/0000-0002-3423-3780
d
https://orcid.org/0000-0003-2954-0855
microphone, are used for drone-to-drone detection.
By the sensor fusion, two different sensors can com-
pensate each other. The experiment is conducted in
the scenario that two drones are facing each other in
the air. The distance between the target drone and
the moving plane of the detecting drone are set from
20m to 60m to experiment with how far can the tar-
get drone be detected. The collected dataset is used
in developing Machine Learning and Deep Learning
models to detect a drone using various sensors. This
paper focuses on UAV detection by certain range us-
ing audio-based and vision-based approaches.
In previous research, various feature extraction
methods were proposed such as MFCC, Log Mel-
spectrogram, Short Time Fourier Transform (STFT),
(S. Al-Emadi, A. Al-Ali, A. Mohammad, and A. Al-
Ali, 2019), (Y. Wang, F. E. Fagian, K. E. Ho, and E. T.
Matson, 2021). From these extraction methods, var-
ious studies have succeeded in detecting drones us-
ing MFCC, (S. Jeon, J. -W. Shin, Y. -J. Lee, W. -
H. Kim, Y. Kwon, and H. -Y. Yang, 2017). In this
work, SVM and a Convoluntional Neural Network
are used for drone detection with audio data. Log
Mel-spectrogram and MFCC are evaluated for feature
extraction. For Computer Vision, a state-of-the-art
structure, you only look once - YOLOV5 is applied
Kim, J., Kim, Y., Shin, H., Wang, Y. and Matson, E.
How Far Can a Drone be Detected? A Drone-to-Drone Detection System Using Sensor Fusion.
DOI: 10.5220/0011791000003393
In Proceedings of the 15th International Conference on Agents and Artificial Intelligence (ICAART 2023) - Volume 3, pages 877-884
ISBN: 978-989-758-623-1; ISSN: 2184-433X
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
877

to detect the drone. After comparing different models
and feature extraction methods, we choose the CNN
model and MFCC feature for the sensor fusion. In our
proposed fusion system, the YOLOV5 model first de-
tects the detecting drone using visual data; then, the
falsely detected data are reclassified with a pre-trained
CNN model based on audio data. Overall, the main
contributions of this work can be summarized as fol-
lows:
• We gather the drone-to-drone audio and video
data that is collected at a distance of 20 to 60 me-
ters manually.
• We propose a novel drone detection scheme that
reduces the error rate using the proposed sensor
fusion.
The rest of the work contains five sections. Sec-
tion 2 reviews several related works to organize the
problems. In Section 3, our methodology is intro-
duced, which includes data collection and data pro-
cessing. In Section 4, the experiments of proposed
system are conducted to evaluate the optimal perfor-
mances for each domain and also for the sensor fusion
of both domains. Lastly, Section 5 suggests the con-
clusions and future works.
2 RELATED WORK
2.1 Radio Frequency and Radar-Based
Approach
Currently, various methods have been used for drone
detection and drone localization. In (Choi B, Oh D,
Kim S, Chong J-W, Li Y-C., 2018), distance esti-
mation or drone localization was done in two ways.
Firstly, the implemented FMCW radar system result
with only one drone showed the maximum distance
between the drone and the radar system was greater
than about 1005 to 1010 m. Meanwhile, when the
two drones were flying at the same time, one frame
of the detection results in a range of around 339 m.
The distance of drone-to-drone detection using radar
is shorter than using only one drone flying. However,
radar-based detection is not optimized for plastic ma-
terial drone detection and small drone at widely vary-
ing ranges (Liu, Hao, et al., 2017). Also, radar is a
high-cost sensor.
2.2 Audio-Based Deep Learning
Approach
A radar system has a small cross-section, and radio
frequency (RF) based systems do not operate well
when GPS communication signals are small; there-
fore their performances are limited. However, the
microphone array overcomes the shortcomings of the
sensors and shows excellent performance in drone lo-
calization and drone tracking. In (Christnacher, F.,
Hengy, S., Laurenzis, M., Matwyschuk, A., Naz, P.,
Schertzer, S., & Schmitt, G., 2016), four microphone
sensors were used to predict the direction of drone
arrival (DOA), and localization is performed by ob-
taining azimuth and elevation angles by a multi-signal
classification algorithm (MUSIC). In fact, it showed a
very low performance. Meanwhile, in (Sedunov, A.,
Sutin, A., Sedunov, N., Salloum, H., Yakubovskiy,
A., & Masters, D., 2016), (H. Salloum, A. Sedunov,
N. Sedunov, A. Sutin and D. Masters, 2015), Acous-
tic Aircraft Detection (AAD) systems were developed
and built. This system can detect and track small air-
planes and helicopters, whereas it does not consider a
situation with multiple noises.
2.3 Vision-Based Deep Learning
Approach
Research on drone detection systems using Computer
Vision is one of the traditional methods that is widely
used in the past. Furthermore, research on drone de-
tection systems using computer vision-based technol-
ogy has been shown to be sufficiently accurate and
commercially available by experiments conducted by
(Deng, S., Li, S., Xie, K., Song, W., Liao, X., Hao, A.,
& Qin, H, 2020). Among CNN-based deep learning
models, YOLO, a one-stage model, is easy to detect
drone objects in real-time and can respond in a very
short time. Thus, it can be applied to systems such as
CUAS.
2.4 Depth Estimation and Distance
Prediction
Depth estimation and distance prediction have made
enormous progress in recent years and achieved sig-
nificant results with the advance of deep learning (Al-
malioglu, Yasin, et al., 2019), (Wu, Zhenyao, et al.,
2019), (Feng, Tuo, and Dongbing Gu., 2019). In the
early stage, (Aswini, N., S. V. Uma, and V. Akhilesh.,
2022) applied object detection model-YOLOV3 and
mathematical principles for obstacle distance estima-
tion. They established the maximum distance to the
obstacle is a 30m. Beside, we set the distance to the
drone to a maximum of 60m. On the other hand, (Yip,
Daniel A., et al., 2020) designed a sound level mea-
surements from audio recordings that provides objec-
tive distance estimation. However, our paper utilizes
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
878
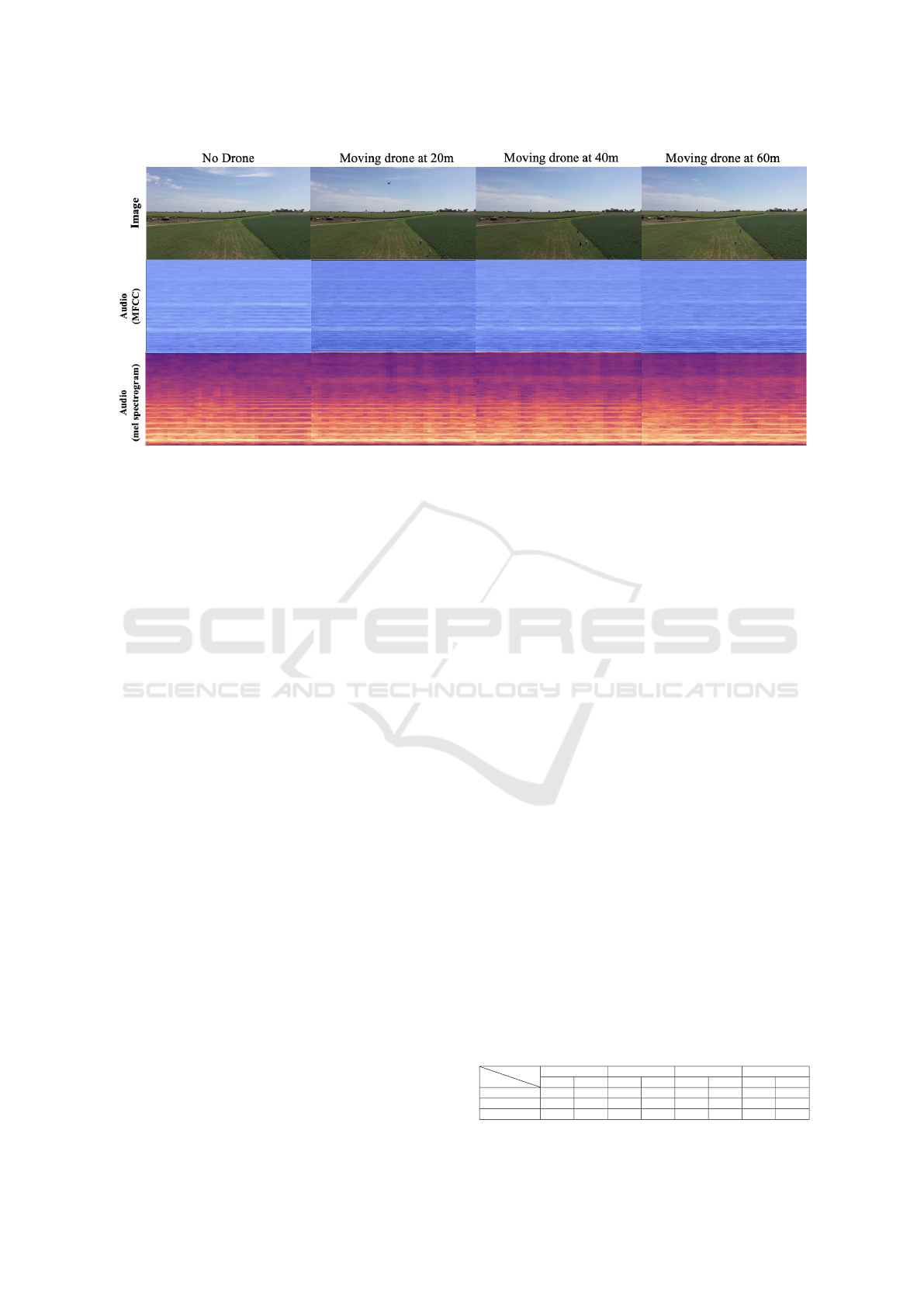
Figure 1: Visual of data samples. We use the manually collected audio and image input data. From the first left column,
there are no drone data, drone data at a 20m distance, drone data at 40m, and lastly the drone data at 60m. Then, from the first
top row, there are image samples, mel spectrogram feature map from audio data and MFCC feature maps from audio data.
both sound and visual source for drone distance pre-
diction.
3 METHODOLOGY
3.1 Data Collection
The data collection method of this paper is the simi-
lar as that of previous work (Kim. J, Lee. D, Kim. Y,
Shin. H, Heo. Y, Wang. Y, & Matson, E. T, 2022). We
use DJI Matrice200 as te target drone and DJI Mavic2
Pro as the detecting drone to collect data in this re-
search. Similar to (Alaparthy, V., Mandal, S., & Cum-
mings, M., 2021), the negative dataset, i.e., no drone
data, is also collected for the drone detection, which
includes environment noises while no drone is flying
in the air such as wind or bird sound. Various previ-
ous studies (Liu, Hao, et al., 2017), (Hu, Yuanyuan, et
al., 2019), (Al-Emadi, Sara, et al., 2019) have imple-
mented with the camera and microphone placing on
the ground to collect data containing the target drone.
In contrast, our dataset was collected from the cam-
era and the microphone of detecting drone while two
drones were flying in the air at the same time, facing
each other.
The detecting drone was hovering at the altitude
of 10m. While hovering, the audio and video data
were collected using the built-in camera and iPhone
6 attached to the detecting drone. Then, the target
drone was maintaining the distance with plane of de-
tecting drones moving horizontally and vertically by
20m, 40m, and 60m. With the fixed distance, the tar-
get drone was moving randomly at the camera range.
The weather condition varies in the days of data
collection. The different weather conditions include
windy, sunny, and foggy days with different humidity
levels and wind speed. So, the background images
and noise are included in the data, while other en-
vironmental factors being the same that of the drone
data.
Audio data consists four classes in .wav format.
The data are collected in the environment with other
various noises such as wind, bird, cow, insect, traffic,
airplane, etc.
When collecting vision data, the raw mp4 video
files are split into images per 30 frames. Each image
has 640 x 640 resolution, and the image format is jpg.
For each domain of audio and image data, 1029
data samples are collected for each class. Thus, total
4116 data samples are collected for each domain, as
shown in Table 1.
3.2 Audio Data Augmentation
The raw audio data is split into one second which can
sufficiently represent acoustic-based features in train-
ing and testing (S. Seo, S. Yeo, H. Han, Y. Ko, K.
E. Ho, and E. T. Matson, 2020), (Casabianca, Pietro,
and Yu Zhang, 2021), (S. Al-Emadi, A. Al-Ali, A.
Mohammad, and A. Al-Ali, 2019).
Table 1: The Number of Dataset.
Split
Class No drone 20m 40m 60m
Audio Image Audio Image Audio Image Audio Image
Train 720 720 719 719 719 719 719 719
Validation 204 204 205 205 205 205 205 205
Test 105 105 105 105 105 105 105 105
How Far Can a Drone be Detected? A Drone-to-Drone Detection System Using Sensor Fusion
879

Before conducting feature extraction, pitch shift-
ing is used for audio data augmentation in order to
improve performance in generalization. Pitch shift-
ing is a methodology to raise or lower the pitch of the
audio data without affecting the speed of the sound.
In (J. Salamon and J. P. Bello, 2017), pitch shifting
augmentation shows the best positive impact on per-
formance and is the only method that does not have
negative impacts on any types of environmental sound
classification. Therefore, the total number of data
samples doubled as 8232 from the original dataset.
3.3 Audio Feature Extraction
The audio features are extracted using two feature ex-
traction methods: MFCC and Log Mel-Spectrogram.
Also, MFCC provides useful features to capture peri-
odicity from the fundamental frequencies brought on
drone’s rotor blades (Jeon, S., Shin, J. W., Lee, Y. J.,
Kim, W. H., Kwon, Y., & Yang, H. Y., 2017). Mean-
while, the Log Mel-Spectrogram has a low false alarm
rate but a weak drone detection ability. However, the
MFCC has a strong drone detection ability while hav-
ing a high False Alarm Rate compared to Log Mel-
Spectrogram (Dong, Qiushi, Yu Liu, and Xiaolin Liu,
2022). For the hyper-parameter, the number of mels is
used as 128 which is the default value, and the num-
ber of MFCC is also unified as 128. The examples
of extracted feature map of four classes are shown in
Figure 1.
3.4 Vision Data Processing
To the purpose, train the model for drone detection,
all of the ground truth objects in the picture require
to be labeled first. This dataset is labeled using the
“LabelImg” (heartexlabs, 2014). The coordination of
the bounding box including the location information
of drones is generated as text files.
4 EXPERIMENT
4.1 Overview
In this paper, the low-cost sensor fusion system for
detecting the target drone by three intervals is pro-
posed. The camera and the microphone used for this
system are attached to the Drone (A. Patle and D. S.
Chouhan, 2013). Generally, drone detection results
using visual-based features show a high performance
(Madasamy, K., Shanmuganathan, V., Kandasamy,
V., Lee, M. Y., & Thangadurai, M, 2021). However,
the camera cannot perform its role properly in situa-
tions where vision is obstructed. In the dataset we col-
lected, weather conditions are the main factors for the
obstruction including cloudy and foggy conditions.
This can be compensated by using additional sensor
for drone detection, which is audio-based features.
Therefore, drone detection is done based on vision-
based features using the YOLOV5 model. Then, the
falsely detected vision data is reclassified using audio
data with a CNN model. The falsely detected data is
specifically the ones that are classified as False Nega-
tive (FN) and False Positive (FP). The proposed sys-
tem is described in Figure 2.
The sound of the detecting drone with the micro-
phone attached is considered the background noise
when detecting another drone. Although two drone
sounds are simultaneously recorded, drone detection
is successfully presented in this paper. Practically, in
(Kim. J, Lee. D, Kim. Y, Shin. H, Heo. Y, Wang.
Y, & Matson, E. T, 2022), while the microphone is
attached to the detecting drone, another drone is de-
tected through an audio signal up to 20m with an ac-
curacy of 88.96%.
4.2 Audio Classification
4.2.1 Background
Machine Learning and Deep Learning approaches are
well-known for achieving high performances for the
drone detection system using audio data. In (Seo,
Y., Jang, B., & Im, S., 2018), comparing to SVM,
CNN showed a decrease in false positives and an in-
crease in the correct detection rate. Similarly, (Seo,
Y., Jang, B., & Im, S., 2018) also obtained the re-
sult of the Deep learning model which shows a higher
performance than that of SVM, with 8.31% improve-
ment. In this experiment (Seo, Y., Jang, B., & Im, S.,
2018), the performance of SVM and CNN are both
evaluated with two different features, which are Mel-
Spectrogram and Mel Frequency Cepstral Coefficient.
Various kernels of SVM are applied to classify the
features.
SVM acquires an optimal hyperplane containing
positive and negative samples with the principle of
structural risk minimization (Winters-Hilt, S., Yelun-
dur, A., McChesney, C., & Landry, M., 2006). Mean-
while, the CNN model also demonstrates high perfor-
mance for the two-dimensional features in many ap-
plications such as audio-based features (Seo, Y., Jang,
B., & Im, S., 2018). CNN model is composed of mul-
tiple layered neural networks including a convolution
layer, a pooling layer, an active layer, and a full con-
nection layer.
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
880

Figure 2: Overview of the drone detection system.
4.2.2 Machine Learning Training
The input dimension of the Support Vector Machine
should be 1-dimension (1 x N) for each data sam-
ple. The Principal Component Analysis (PCA) is ap-
plied for dimension reduction from (2 x N) to (1 x
N). Also, the N, the hyper-parameter of PCA named
n components, is set as 128.
Grid search refers to the process of training a cer-
tain model with all possible combinations of differ-
ent hyper-parameters within the range specified by
the user and eventually obtaining the optimal hyper-
parameter that shows the highest performance.
Three different kernels, Gaussian Radial Basis
Function (RBF), sigmoid, and polynomial kernels,
are used. One of the most commonly used kernel
functions is the radial basis function. Each data point
has a ”bump” added to it.
K(x, x
i
) = e
−γ
x − x
i
2
(1)
Here γ, r and d are kernel parameters.
K(x
i
, x
j
) = tanh(γx
T
i
x
j
+ r) (2)
The polynomial kernel function is directional. In
other words, the direction of the two vectors in low-
dimensional space determines the output. This is due
to the dot product in the kernel. The magnitude of the
vector x influences both the output and the vector’s
magnitude.
K(x, x
i
) =
1 + x · x
T
i
d
(3)
d is the degree of kernel function.
In the kernel functions, a gamma hyper-parameter
defines how far the influence of a single training point
reaches and the range set as 1e-3 to 1e-6 multiplied
by 0.1 intervals. Also, C is another hyper-parameter
that controls the trade-off between smooth decision
boundary and classifying training points correctly and
the range set from 1e-3 to 1e3 (A. Patle and D. S.
Chouhan, 2013). For the model’s stability, 5-fold
cross validation is applied.
4.2.3 Deep Learning Training
Early Stopping technique is used for training in or-
der to prevent overfitting. The monitor and the pa-
tient hyper-parameters are set as a validation loss and
15 respectively. Softmax is used for the last activa-
tion layer as an activation function. The two different
optimizers, Stochastic Gradient Descent (SGD) and
Adam, are used for evaluation. Also, 5-fold cross-
validation is applied for obtaining a more accurate es-
timate of model prediction performance.
4.2.4 Result and Analysis
As a result of using 5-fold cross validation procedure
with MFCC feature extraction for the SVM model,
the accuracy is obtained as 65.5%. Among different
combinations of hyper-parameters, the highest perfor-
mance is shown when the kernel function is set to
RBF, 1e-5 for gamma, and 10 for C. On the other
hand, the result of the 5-fold cross validation of SVM
using Log Mel features is 34.5%. Thus, it can be seen
that better results are obtained when MFCC is used
for the feature extraction for the SVM model.
Overall, from Table 2 to Table 5, CNN based on
MFCC features using Stochastic Gradient Descent as
an optimizer shows the highest and the most stable
performance in multi-class classification. The model
can detect up to 40 meters with more than 70% accu-
How Far Can a Drone be Detected? A Drone-to-Drone Detection System Using Sensor Fusion
881
racy.
In comparison of two models, the CNN model
shows better performances than the SVM model for
drone detection based on the audio-based features.
Therefore, the CNN model based on MFCC features
is employed for the second step of the proposed drone
detection system as shown in Figure 2.
Table 2: CNN-MFCC Adam.
Class Precision Recall F1 Accuracy
no drone 74.0% 66.0% 69.7% 66.0%
20m 75.0% 75.0% 74.7% 74.9%
40m 54.3% 57.3% 56.0% 57.5%
60m 59.0% 61.3% 60.3% 62.2%
Table 3: CNN-Mel Adam.
Class Precision Recall F1 Accuracy
no drone 75.7% 70.7% 73.0% 70.8%
20m 74.5% 68.0% 70.7% 67.9%
40m 55.3% 54.7% 54.7% 54.6%
60m 61.0% 69.0% 64.0% 69.8%
Table 4: CNN-MFCC SGD.
Class Precision Recall F1 Accuracy
no drone 75.3% 75.0% 75.0% 75.2%
20m 78.0% 78.3% 78.0% 78.4%
40m 60.7% 70.7% 65.0% 70.5%
60m 73.3% 60.3% 66.0% 61.0%
Table 5: CNN-Mel SGD.
Class Precision Recall F1 Accuracy
no drone 48.3% 45.7% 44.4% 45.4%
20m 60.3% 50.3% 54.0% 50.1%
40m 42.3% 63.0% 50.7% 62.9%
60m 45.7% 33.0% 38.3% 33.3%
4.3 Vision Object Detection
To detect the drone in images, Convolution with
Batch normalization and Leaky ReLU (CBL), spa-
tial Pyramid Pooling (SPP), and Cross Stage Partial
(CSP) were used in the backbone layer of YOLOV5
(Ultralytics, ”YOLOV5”), which introduces a type
of powerful object detecting model. The backbone
network obtains feature maps of different sizes from
input images via the pooling layer and convolution
layer. The total structure is shown in Figure 3.
First, CBL is a block that is fundamentally used
to extract features containing of leaky ReLU, batch
normalization and the convolution layer. SPP en-
hances performance by pooling different sizes of fea-
ture maps with filters and then merging them again.
The CSP divides the feature map of the base layer into
two parts to depress the massive inference computa-
tions caused by duplicate gradient information. Then,
they are combined again in the cross-stage hierarchy
method proposed in the paper (Wang, Chien-Yao, et
al.,). This way, the spread out gradient information
can have a huge correlation difference by transition
the transformation and concatenation steps. Further-
more, CSP can considerably impair computational ef-
fort and improve inference cost and accuracy.
5 Backbone networks - YOLOv5-n,s,m,l,x are
used. Each model is distinguished by depth multiple
and width multiple, and can be organized. The larger
the depth multiple value, the more BottleneckCSP()
is repeated to become a deeper model. Moreover, the
larger the width multiple, the higher Convolution fil-
ter number of the corresponding layer.
The training is performed through the SGD opti-
mizer with a momentum of 0.937 and weight decay of
1e-5. Also, for other hyper-parameters, the model ini-
tializes the learning rate as 0.01 and the batch size of
16. The iteration is set to 30. Our model architecture
has 270 layers and 17K parameters. The evaluation
performances for drone detection tasks are measured
by precision, recall, and accuracy.
4.4 Sensor Fusion
As previously mentioned in Figure 2, the fusion
method includes two steps. The first step is drone
detection using the YOLOV5 model based on vision-
based features. Then, from the first step, the falsely
detected data by the YOLOV5 model is re-classified
by the pre-trained CNN model as shown in the sec-
ond step. This proposed system including two steps
shows the highest performance among three method-
ologies: using only audio-based features, only vision-
based features, and the decision fusion of both fea-
tures. As shown in Figure 4, for the distance of 40m,
the accuracy of the fusion method reached 88% which
is about 10% to 20% higher than the accuracies of
the two individual methods of using only one sensor.
Furthermore, for the drone detection in different dis-
tances, it can be clearly noticed that the performance
decreases as the distance from the detecting drone in-
creases.
5 CONCLUSION AND FUTURE
WORKS
The proposed system combines a camera and a mi-
crophone to perform drone detection and distance in-
terval estimation. First, YOLOV5 is trained with im-
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
882

Figure 3: YOLOV5 Architecture.
age data with different ranges of distances. From the
tested result, certain data which are classified as False
Negative (FN) and False Positive (FP) are again re-
classified CNN models using MFCC features that are
pre-trained with audio data.
Although the microphone is attached directly to
the detecting drone, the model is able to detect the
target drone flying in 20m with the accuracy of 78%.
When the distance becomes far off from 20m to
40m, the performance of our proposed system is 10%
higher than when using only vision and 17% higher
than when using only audio. Even if the distance of
the plane of the target drone is 60m away from the
detecting drone, it is possible to detect the drone with
80% high performance as shown in Figure 4.
Figure 4: The detection accuracy decline as the distance
between the detecting drone and the moving plane of target
drone increases.
Figure 4 shows that the detection performance de-
creases as the distance between the detecting drone
and the moving plane of target drone increases. This
research has a limitation of only one type of target
drone being used. In the future work, various types of
drones will be used. Also, we plan to apply other deep
learning methods, such as LSTM and RCNN, will be
used to compare the performances and find the best
model for drone-to-drone detection using audio and
computer vision sensor.
REFERENCES
AA. Patle and D. S. Chouhan, ”SVM kernel functions
for classification,” 2013 International Conference on
Advances in Technology and Engineering (ICATE),
2013, pp. 1-9, doi: 10.1109/ICAdTE.2013.6524743
Al-Emadi, S., Al-Ali, A., & Al-Ali, A. (2021). Audio-based
drone detection and identification using deep learning
techniques with dataset enhancement through genera-
tive adversarial networks. Sensors, 21(15), 4953.
Alaparthy, V., Mandal, S., & Cummings, M. (2021, March).
Machine Learning vs. Human Performance in the Re-
altime Acoustic Detection of Drones. In 2021 IEEE
Aerospace Conference (50100) (pp. 1-7). IEEE.
Almalioglu, Y., Saputra, M. R. U., De Gusmao, P. P.,
Markham, A., & Trigoni, N. (2019, May). GANVO:
Unsupervised deep monocular visual odometry and
depth estimation with generative adversarial net-
works. In 2019 International conference on robotics
and automation (ICRA) (pp. 5474-5480). IEEE.
Aswini, N., S. V. Uma, and V. Akhilesh. ”Drone to Obstacle
Distance Estimation Using YOLO V3 Network and
Mathematical Principles.”Journal of Physics: Confer-
ence Series. Vol. 2161. No. 1. IOP Publishing, 2022.
Casabianca, Pietro, and Yu Zhang. ”Acoustic-based UAV
detection using late fusion of deep neural networks.”
Drones 5.3 (2021): 54.
Choi B, Oh D, Kim S, Chong J-W, Li Y-C. Long-Range
Drone Detection of 24 G FMCW Radar with E-plane
Sectoral Horn Array. Sensors. 2018; 18(12):4171.
https://doi.org/10.3390/s18124171
Choi, D., Shallue, C. J., Nado, Z., Lee, J., Maddison,
C. J., & Dahl, G. E. (2019). On empirical compar-
isons of optimizers for deep learning. arXiv preprint
arXiv:1910.05446.
How Far Can a Drone be Detected? A Drone-to-Drone Detection System Using Sensor Fusion
883

Christnacher, F., Hengy, S., Laurenzis, M., Matwyschuk,
A., Naz, P., Schertzer, S., & Schmitt, G. (2016,
October). Optical and acoustical UAV detection. In
Electro-Optical Remote Sensing X (Vol. 9988, pp. 83-
95). SPIE.
Deng, S., Li, S., Xie, K., Song, W., Liao, X., Hao, A., &
Qin, H. (2020). A global-local self-adaptive network
for drone-view object detection. IEEE Transactions on
Image Processing, 30, 1556-1569.
Dong, Qiushi, Yu Liu, and Xiaolin Liu. ”Drone sound de-
tection system based on feature result-level fusion us-
ing deep learning.” Multimedia Tools and Applica-
tions (2022): 1-23.
Feng, Tuo, and Dongbing Gu. ”SGANVO: Unsuper-
vised deep visual odometry and depth estimation
with stacked generative adversarial networks.”IEEE
Robotics and Automation Letters 4.4 (2019): 4431-
4437.
H. Abdullah, ”Man Detained for Flying Drone Near
White House”. NEWS, May. 15, 2015. [On-
line]. Available: https://www.nbcnews.com/news/us-
20news/20man-20detained-20trying- 20fly-20drone-
20near-20white-20house-20n359011
H. Salloum, A. Sedunov, N. Sedunov, A. Sutin and D. Mas-
ters, J. Salamon and J. P. Bello, ”Deep Convolutional
Neural Networks and Data Augmentation for Environ-
mental Sound Classification,” in IEEE Signal Process-
ing Letters, vol. 24, no. 3, pp. 279-283, March 2017,
doi: 10.1109/LSP.2017.2657381.
H. Liu, Z. Wei, Y. Chen, J. Pan, L. Lin and Y. Ren, ”Drone
Detection Based on an Audio-Assisted Camera Ar-
ray,” 2017 IEEE Third International Conference on
Multimedia Big Data (BigMM), 2017, pp. 402-406,
doi: 10.1109/BigMM.2017.57.
Hu, Y., Wu, X., Zheng, G., & Liu, X. (2019, July). Ob-
ject detection of UAV for anti-UAV based on im-
proved YOLO v3. In 2019 Chinese Control Confer-
ence (CCC) (pp. 8386-8390). IEEE.
Heartexlabs, ”labelImg”, github.com (2014)
Jeon, S., Shin, J. W., Lee, Y. J., Kim, W. H., Kwon, Y.,
& Yang, H. Y. (2017, August). Empirical study of
drone sound detection in real-life environment with
deep neural networks. In 2017 25th European Signal
Processing Conference (EUSIPCO) (pp. 1858-1862).
IEEE.
Kim, J., Lee, D., Kim, Y., Shin, H., Heo, Y., Wang, Y., &
Matson, E. T. (2022). Deep Learning Based Malicious
Drone Detection Using Acoustic and Image Data (No.
9335). EasyChair.
Madasamy, K., Shanmuganathan, V., Kandasamy, V., Lee,
M. Y., & Thangadurai, M. (2021). OSDDY: embed-
ded system-based object surveillance detection system
with small drone using deep YOLO. EURASIP Jour-
nal on Image and Video Processing, 2021(1), 1-14.
S. Al-Emadi, A. Al-Ali, A. Mohammad and A. Al-
Ali, ”Audio Based Drone Detection and Identifi-
cation using Deep Learning,” 2019 15th Interna-
tional Wireless Communications & Mobile Comput-
ing Conference (IWCMC), 2019, pp. 459-464, doi:
10.1109/IWCMC.2019.8766732.
Sedunov, A., Sutin, A., Sedunov, N., Salloum, H.,
Yakubovskiy, A., & Masters, D. (2016). Passive
acoustic system for tracking low-flying aircraft. IET
Radar, Sonar & Navigation, 10(9), 1561-1568.
S. Jeon, J. -W. Shin, Y. -J. Lee, W. -H. Kim, Y. Kwon and H.
-Y. Yang, ”Empirical study of drone sound detection
in real-life environment with deep neural networks,”
2017 25th European Signal Processing Conference
(EUSIPCO), 2017, pp. 1858-1862, doi: 10.23919/EU-
SIPCO.2017.8081531.
S. Seo, S. Yeo, H. Han, Y. Ko, K. E. Ho and E. T. Matson,
”Single Node Detection on Direction of Approach,”
2020 IEEE International Instrumentation and Mea-
surement Technology Conference (I2MTC), 2020, pp.
1-6, doi: 10.1109/I2MTC43012.2020.9129016.
Seo, Y., Jang, B., & Im, S. (2018, November). Drone detec-
tion using convolutional neural networks with acous-
tic STFT features. In 2018 15th IEEE International
Conference on Advanced Video and Signal Based
Surveillance (AVSS) (pp. 1-6). IEEE.
Ultralytics, ”YOLOV5”, github.com
https://github.com/ultralytics/YOLOV5
Wang, C. Y., Liao, H. Y. M., Wu, Y. H., Chen, P. Y., Hsieh,
J. W., & Yeh, I. H. (2020). CSPNet: A new backbone
that can enhance learning capability of CNN. In Pro-
ceedings of the IEEE/CVF conference on computer
vision and pattern recognition workshops (pp. 390-
391).
Winters-Hilt, S., Yelundur, A., McChesney, C., & Landry,
M. (2006, September). Support vector machine im-
plementations for classification & clustering. In BMC
bioinformatics (Vol. 7, No. 2, pp. 1-18). BioMed Cen-
tral.
Wu, Z., Wu, X., Zhang, X., Wang, S., & Ju, L. (2019). Spa-
tial correspondence with generative adversarial net-
work: Learning depth from monocular videos. In Pro-
ceedings of the IEEE/CVF International Conference
on Computer Vision (pp. 7494-7504).
Y. Wang, F. E. Fagian, K. E. Ho and E. T. Matson, ”A Fea-
ture Engineering Focused System for Acoustic UAV
Detection,” 2021 Fifth IEEE International Conference
on Robotic Computing (IRC), 2021, pp. 125-130, doi:
10.1109/IRC52146.2021.00031.
Yip, D. A., Knight, E. C., Haave-Audet, E., Wilson, S. J.,
Charchuk, C., Scott, C. D., ... & Bayne, E. M. (2020).
Sound level measurements from audio recordings pro-
vide objective distance estimates for distance sam-
pling wildlife populations. Remote Sensing in Ecol-
ogy and Conservation, 6(3), 301-315.
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
884
