
Few-Shot Gaze Estimation via Gaze Transfer
Nikolaos Poulopoulos
a
and Emmanouil Z. Psarakis
b
Department of Computer Engineering & Informatics, University of Patras, Greece
Keywords:
Gaze Estimation, Gaze Transfer, Gaze Tracking, Deep Neural Networks, Convolutional Neural Networks,
Transfer Learning.
Abstract:
Precise gaze estimation constitutes a challenging problem in many computer vision applications due to many
limitations related to the great variability of human eye shapes, facial expressions and orientations as well as
the illumination variations and the presence of occlusions. Nowadays, the increasing interest of deep neural
networks requires a great amount of training data. However, the dependency on labeled data for the purpose
of gaze estimation constitutes a significant issue because they are expensive to obtain and require dedicated
hardware setup. To address these issues, we introduce a few-shot learning approach which exploits a large
amount of unlabeled data to disentangle the gaze feature and train a gaze estimator using only few calibration
samples. This is achieved by performing gaze transfer between image pairs that share similar eye appearance
but different gaze information via the joint training of a gaze estimation and a gaze transfer network. Thus, the
gaze estimation network learns to disentangle the gaze feature indirectly in order to perform precisely the gaze
transfer task. Experiments on two publicly available datasets reveal promising results and enhanced accuracy
against other few-shot gaze estimation methods.
1 INTRODUCTION
Eye gaze constitutes a revolutionary approach to in-
teract without physical contact and provides a rich in-
formation of human intention, cognition and behav-
ior (Eckstein et al., 2017). Nowadays, eye gaze is of
growing interest providing a new input modality for
various human computer interaction (HCI) appli-
cations like:
• virtual reality (Chen et al., 2020)
• health care and analysis (Huang et al., 2016)
• self-driving cars (Palazzi et al., 2019), etc.
Despite the active research in this field, the accuracy
of such eye gaze systems has room for improvement
and usually downgraded by many limitations. The
main challenges are related to the wide variety of hu-
man eye shapes, the eye states (open or closed), the
facial expressions and orientations, etc. Moreover, the
presence of occlusions from hair and glasses, reflec-
tions and shadows as well as poor lighting and low
image resolution further degrades the gaze estimation
accuracy.
Obtaining high-quality data to train supervised
gaze estimators constitutes an expensive and chal-
a
https://orcid.org/0000-0002-8341-9805
b
https://orcid.org/0000-0002-9627-0640
lenging task. This happens because the gaze direction
can only be measured indirectly, using complicated
hardware setups and geometry calculations. The lim-
ited labeled datasets usually lead supervised methods
to overfit the training data. On the other hand, there is
a plenty of unlabeled eye data available for free.
To address these limitations and become less de-
pendent on labeled data, we introduce a few-shot
learning approach which exploits a large amount of
unlabeled data to disentangle the gaze feature and
train a gaze estimator using only few calibration sam-
ples (e.g. 100). To achieve so, we perform gaze trans-
fer between pairs of images that share similar eye ap-
pearance but different gaze information. To that end,
a gaze transfer network and a gaze estimation net-
work were trained jointly. The gaze estimation net-
work aims to encode gaze information of the refer-
ence eye image, while the gaze transfer network aims
to transfer the gaze of the input eye image to the one
learned from the gaze estimation network. The main
contributions of this work are summarized as follows:
• An unsupervised gaze representation learning
approach, based on gaze transfer.
• An extension of image pairs selection with differ-
ent head poses.
• Enhanced gaze estimation accuracy with only
few calibration samples.
806
Poulopoulos, N. and Psarakis, E.
Few-Shot Gaze Estimation via Gaze Transfer.
DOI: 10.5220/0011789800003417
In Proceedings of the 18th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2023) - Volume 5: VISAPP, pages
806-813
ISBN: 978-989-758-634-7; ISSN: 2184-4321
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

2 RELATED WORK
In this section, we review relevant works on gaze
estimation and unsupervised representation learning.
Gaze Estimation Methods: can be divided into
model-based and appearance-based methods. Model-
based methods estimate gaze by fitting a geometric
eye model to the eye image (Park et al., 2018), (Wang
and Ji, 2018) and rely on accurately detected facial
features (e.g. eye corners or eye centers) (Poulopou-
los and Psarakis, 2022a), (Poulopoulos and Psarakis,
2022b). However, the accuracy of these methods
highly depends on the image resolution and the illu-
mination thus resulting into degraded performance in
real-world scenarios. Appearance-based methods di-
rectly regress the gaze vector from the eye images and
nowadays outperform model-based methods in terms
of accuracy (Zhang et al., 2019). While early works
assumed a fixed head pose (Lu et al., 2014), recent
works allow an unconstrained head movement in re-
lation to the camera (Kellnhofer et al., 2019). Deep
CNNs have also achieved several improvements over
the last years. Krafka et al. (Krafka et al., 2016) in-
dicated that a multi-region CNN considering the eye
regions and the face as inputs can benefit gaze estima-
tion performance. Zhang et al. (Zhang et al., 2017) in-
troduced a CNN with a spatial weights mechanism in
order to enhance the gaze-related information. Cheng
at al. (Cheng et al., 2018) exploited the asymmetric
performance of the left and right eyes using an evalu-
ation network in order to improve the gaze accuracy.
A data augmentation approach for improving the gaze
estimation has been proposed by Zheng et al. (Zheng
et al., 2020). Although the aforementioned methods
perform well on within dataset evaluations, they lack
of accuracy when tested on new data. This happens
because they strongly depend on the amount and di-
versity of training data which are limited due to the
difficulty to collect accurate 3D gaze annotations. Re-
cently, there is an increasing interest in collecting syn-
thetic data to overcome this limitation (Wood et al.,
2015),(Wood et al., 2016), but the domain gap be-
tween them and the real ones still remains a crucial
issue.
Unsupervised Representation Learning: aims
to learn specific features from unlabeled images.
Such methods were proposed to solve object de-
tection (Crawford and Pineau, 2019) and localiza-
tion (Poulopoulos et al., 2021), image classification
(Caron et al., 2018) and semantic segmentation prob-
lems (Moriya et al., 2018). Yu et al. (Yu and Odobez,
2020) were the first to learn unsupervised gaze rep-
resentation via gaze redirection. They used the gaze
representation difference of paired images with sim-
ilar head pose to feed a gaze redirection network.
Cross-encoder proposed in (Sun and Chen, 2021)
aimed to disentangle the gaze feature from the eye re-
lated features by reconstructing pairs of images with
switched latent features. Gideon et al. (Gideon and
Stent, 2021) extended this work for the case of multi-
view face video sequences. Despite the growing in-
terest, unsupervised gaze representation learning re-
mains challenging due to the difficulty to disentan-
gle the gaze feature without the annotations. Our
work was inspired by the work proposed in (Yu and
Odobez, 2020) and tried to overcome the aforemen-
tioned challenges by learning the gaze-related fea-
tures via a joint training of a gaze transfer and a gaze
estimation networks with unlabeled pairs of images.
We believe that forcing the gaze estimation network
to learn directly the gaze feature from the reference
images instead of the gaze angle differences (Yu and
Odobez, 2020) can benefit gaze estimation perfor-
mance. Moreover, we showcase that importing the
head pose information into both networks permit us
to overcome the constraint of similar head poses be-
tween the training pairs.
3 THE PROPOSED METHOD
In this section, we are going to give a detailed de-
scription of the proposed framework, as well as, the
network details and training options.
3.1 Overview
The main idea of the proposed unsupervised gaze rep-
resentation approach is shown in Figure 1. As it can
be seen, the proposed framework is composed by:
• a gaze estimation network G
e
(., .;θ) and
• a gaze transfer network G
t
(., .;φ)
with θ, φ denoting their parameters. Both networks
are trained jointly using pairs of unlabeled images.
Specifically, we consider that:
• input image i
in
and target image i
t
, with i denot-
ing the column-wise vectorized version of image
I, share:
– similar eye appearance but
– different gaze direction, while
• reference image i
re f
results from an unknown
transformation which, however, preserves the
gaze information of the input image i
in
.
The aim of the whole framework is to force the gaze
estimation network to learn the gaze of the reference
Few-Shot Gaze Estimation via Gaze Transfer
807

Figure 1: Proposed unsupervised gaze representation learn-
ing. Input and Target images share similar eye appearance
but different gaze direction. Gaze transfer network transfers
the input gaze to the estimated gaze from the gaze estima-
tion network.
image in order to transfer the gaze of the input image
via the gaze transfer network. The generated image
i
g
has to be as close as possible to the target one,
that is the i
t
. Note that the image pairs should be
taken from the same person, but contrary to (Yu and
Odobez, 2020), can share different head poses, as the
pose information is directly imported into both net-
works.
Having completed our presentation of the pro-
posed framework for the gaze problem, we are going
in the next subsection to present our data driven unsu-
pervised approach.
3.2 Unsupervised Gaze Representation
To this end, let us consider the following set of train-
ing paired grayscale images and the head pose vector,
consisted of the polar and azimuthal angles:
S
i
=
n
i
in
k
, i
t
k
, h
t
k
o
K
k=1
(1)
with each member of this set constituting a realiza-
tion of the random variable I whose multivariate pdf,
f
I
(i) is known, and i
in
, i
t
represent realizations of the
input and target images respectively with the last, as it
was mentioned in the previous subsection, having the
same eye appearence but different gaze direction, and
h
t
the head pose vector of the target one.
In addition, we consider that the reference images
i
re f
are derived from the application of a gaze pre-
serving transform, that is it is restricted to be a trans-
lation and/or a scaling, to the target images i
t
, i.e.:
i
re f
= T (i
t
). (2)
Note that under the above mentioned tranform the
head pose vector h
t
is also preserved. During the
training phase, given the head pose vector h of the
target image i
t
the goal of G
e
(i, h; θ) net is to learn
the distribution of the gaze feature g
re f
, that is:
g
re f
θ,k
= G
e
(i
re f
k
, h
t
k
;θ). (3)
Thus, after its training, each value of its output g
re f
θ
⋆
,k
will constitute a realization of this random variable.
On the other hand, the goal of the G
t
(i;φ) is to transfer
the gaze of the i
in
k
according to the g
re f
θ,k
, i.e.:
i
g
k
(θ, φ) = G
t
(i
in
k
, G
e
(i
re f
k
, h
t
k
;θ), h
t
k
; φ) (4)
or, by using Eq. (3), the above equation can be equiv-
alently rewritten as:
i
g
k
(θ, φ) = Gt(i
in
k
, g
re f
θ,k
, h
t
k
; φ). (5)
It is clear that we would like after the training of this
net, its output to reproduce the realizations of i
t
.
In order to achieve it, both networks are trained jointly
by minimizing the following loss function:
L(θ, φ) = E
I∼ f
I
h
||i
t
− i
g
(θ, φ)||
2
2
i
. (6)
In this way, the gaze estimation network is trained in-
directly to disentangle the gaze feature of the refer-
ence image in order the gaze transfer network to gen-
erate an image close to the target one.
3.3 Few-Shot Gaze Estimation
During unsupervised training, gaze estimation net-
work learns a gaze representation from unlabeled im-
ages. In order to map this representation to the real
gaze angles and estimate the gaze in the camera co-
ordinate system, we follow a two-step procedure.
Firstly, we add a MLP layer at the end of the gaze es-
timation network and train only this layer using a few
calibration samples. Then, in order to further adapt to
the calibration samples, we fine-tune all the weights
of the network using these samples. During this pro-
cess, the network weights were initialized from the
preceded unsupervised training and retrained for few
more iterations in order to better fit to the data. Note
that the second step is crucial for the accuracy of the
estimator.
3.4 Network Details
The proposed architecture depicted in Figure 2, con-
sists, as it was already mentioned, of:
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
808

Figure 2: Architecture details of the gaze estimation (a) and gaze transfer (b) networks.
• the gaze estimation and
• the gaze transfer
networks.
The gaze estimation network (Figure 2(a)) consists
of three convolutional layers each one followed by a
rectified linear and a max-pooling layer in order to
extract features in different scales. In particular, the
first convolutional layer consists of 16 channels and
after each stage the number of channels are doubled.
The last layer is followed by two fully connected lay-
ers with 512 and 2 outputs respectively. Moreover,
the head pose is concatenated with the first fully con-
nected layer. Note that the output of the network, sim-
ilarly to (Yu and Odobez, 2020), is set to be of dimen-
sion 2, in order to avoid encoding eye related features
except from the gaze.
The gaze transfer network (Figure 2(b)) is a
three-stage encoder-decoder network. The encoder
comprises a pyramid structure of three convolutional
blocks followed by rectified linear and max-pooling
layers. The first convolutional layer consists of 16
channels and after each stage the channels are dou-
bled. On the other hand, the decoder uses transposed
convolutions to up-sample the feature maps on dif-
ferent scales reducing the number of channels by a
factor of two. All convolutions but the last are fol-
lowed also and rectified linear layers. The bottleneck
between the encoder and decoder consists of a fully
connected layer with dimension of 1024, where the
gaze and head pose vectors are concatenated. The
final feature map is fed into a one-channel convolu-
tional layer with a tanh(.) activation function in order
to aggregate better multi-scale information and obtain
the final generated image.
3.5 Implementation Details
Every face image was cropped according to the de-
tected facial features (Kartynnik et al., 2019) in order
to derive the corresponding eye image and then trans-
formed to grayscale and resized to the size of 64x96
pixels. All experiments were conducted using only
the right eye images. The gaze feature is highly cor-
related with the eye-related features (Sun and Chen,
2021). Thus, in order to disentangle the gaze feature,
we apply a gaze-preserving transformation to the ref-
erence images, similarly to (Yu and Odobez, 2020).
Specifically, the applied random translation and scal-
ing transformations affect the eye feature positions
but not the gaze direction. This transformation im-
proves significantly the accuracy of the gaze estima-
tor, as shown in the next section. The proposed frame-
work was trained for 150 epochs with a batch size of
256 images, using ADAM optimizer (Kingma and Ba,
2015) with default parameters. To speed up the train-
ing process, we use a Nvidia GeForce GTX 1080 Ti
GPU.
Few-Shot Gaze Estimation via Gaze Transfer
809

Figure 3: Sample estimates (red) and ground-truth (green) after the application of the proposed method on Columbia dataset.
Figure 4: Gaze transfer results on Columbia (a) and UTMultiview (b) datasets. The first row corresponds to the input images,
while the second and third rows to the target and generated images respectively.
4 EXPERIMENTS
4.1 Experimental Setup
Datasets. Experiments were performed on two pub-
licly available gaze databases in order to evaluate the
performance of the proposed training scheme. Specif-
ically, Columbia Gaze (Smith et al., 2013) consists of
5880 high resolution images from 56 people over 5
head poses and 21 gaze directions per head pose with
a great variety of ages and ethnicities. UTMultiview
(Sugano et al., 2014) consists of 64000 images of 50
people with 160 gaze directions using eight (8) cam-
eras. Images contain a wide variety of photometric
distortions and shadows.
Validation Settings. Exploiting the division of the
selected Columbia and UTMultivew datasets into 5
and 8 head poses, we performed 5-fold and 8-fold
within-dataset evaluation respectively. In each fold,
the training data were used for unsupervised learn-
ing of the entire framework and then, the selected 100
random annotated samples for few-shot fine-tunning
of the gaze estimation network. Note that the training
pairs were selected randomly with the only constraint
to be from the same person (similar eye appearance).
The remaining test data were used only for validation.
All experiments were performed 5 times and the re-
ported results are the mean errors.
Evaluation Metric. In order to evaluate the accuracy
of the proposed method we adopted as a metric the
angular error in degrees. Let
ˆ
g be the 3-dimensional
predicted gaze vector with respect to the camera co-
ordinate system, after the fine tuning of the whole net,
and g the ground-truth. Then, the angular error is de-
fined as follows:
≩φ
gaze
=
180
π
arccos
<
g
||g||
2
,
ˆ
g
||
ˆ
g||
2
>
(7)
where < ., . >, ||x||
2
denote the inner product operator
and the l
2
norm of vector x respectively.
4.2 Experimental Results
The qualitative evaluation of the proposed method
demonstrates that it is highly accurate and robust.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
810
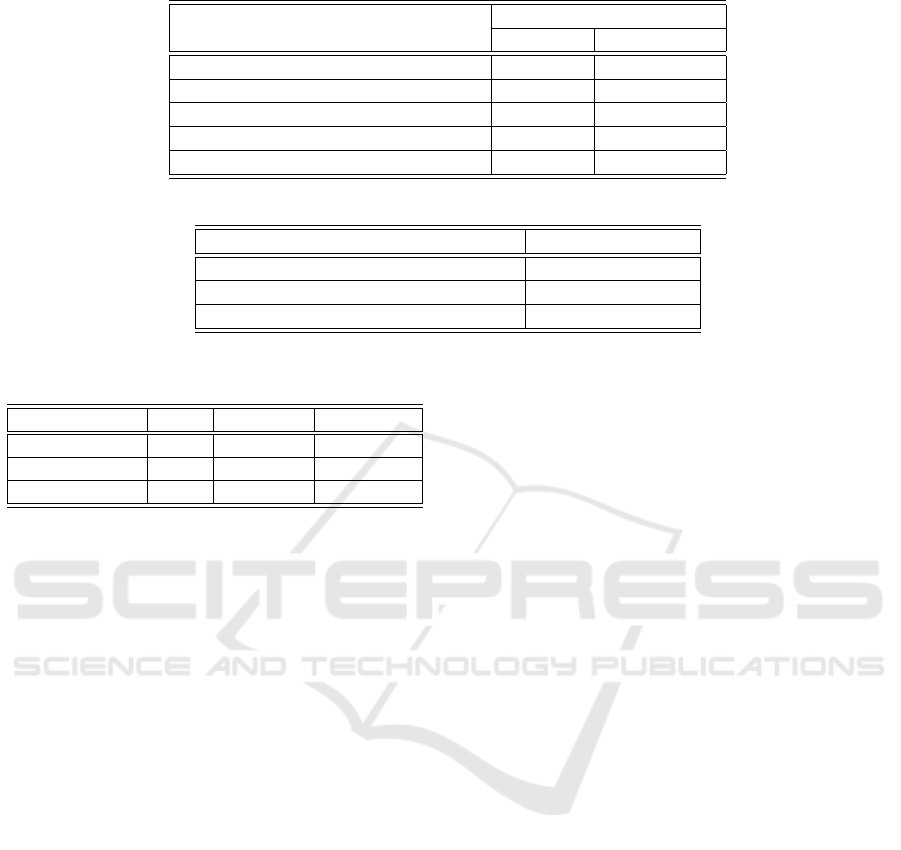
Table 1: Mean angular error of 100-shot gaze estimation on Columbia and UTMultiview datasets.
Method Dataset
Columbia UTMultiview
Proposed 6.1 7.1
Cross-Encoder (Sun and Chen, 2021) 6.4 7.4
Yu2020 (Yu and Odobez, 2020) 7.15 7.88
SimCLR (Chen et al., 2020) 7.2 12.1
BYOL (Grill et al., 2020) 9.9 14.4
Table 2: Mean angular error of 100-shot gaze estimation when trained on UTMultiview and tested Columbia dataset.
Method Angular error
Proposed 8.5
Cross-Encoder (Sun and Chen, 2021) 7.48
Yu2020 (Yu and Odobez, 2020) 8.82
Table 3: Accuracy decrease on Columbia dataset when re-
moving certain parts of the proposed framework.
Angular error MLP Fine tune Head Pose
6.1 ✓ ✓ ✓
7.3 ✓ ✓
9.1 ✓
Figure 3 depicts random results of the proposed gaze
estimation network applied to Columbia database.
For better visualization, the estimated gaze angle
from the right eye is also displayed on the left
eye. As it can be seen, the proposed gaze estima-
tor achieves accurate results even under extreme head
poses. Moreover, the quantitative evaluation of the
learned gaze estimator demonstrates enhanced accu-
racy over other few-shot gaze estimation methods.
The evaluation was performed under both within-
dataset and cross-dataset settings.
4.2.1 Within-Dataset Evaluation
The accuracy of the proposed training scheme per-
forming within-dataset experiments on Columbia and
UTMultiview was compared against other few-shot
gaze estimation methods. Table 1 presents the
comparison results using 100 calibrations samples.
Note that there are limited few-shot gaze estimation
methods available for comparison in the literature.
The proposed learning framework demonstrates en-
hanced accuracy over the rest of the methods both
on Columbia and UTMultivew datasets. Compared
to Yu (Yu and Odobez, 2020) method, it seems that
forcing the gaze estimation network to learn directly
the gaze feature from the reference images instead
of the gaze angle differences can benefit gaze esti-
mation performance. It is worth mentioning that all
the accuracies from the compared methods are the
published ones. Moreover, the accuracies from con-
trastive learning methods SimCLR (Chen et al., 2020)
and BYOL (Grill et al., 2020) derive from (Sun and
Chen, 2021).
4.2.2 Cross-Dataset Evaluation
In order to investigate the performance on totally
unseen images, a cross-dataset evaluation was per-
formed using the UTMultiview dataset for training
and the Columbia dataset for testing. Table 2 presents
the results from the proposed method as well as
from other few-shot gaze estimation methods under
the same training and testing format. The proposed
method performs better compared to Yu (Yu and
Odobez, 2020) method, however, it lacks of accuracy
compared to Cross-Encoder (Sun and Chen, 2021).
This accuracy decrease may results from the great di-
versity between the head pose angles of Columbia and
UTMultiview datasets.
4.2.3 Gaze Transfer
The proposed framework aims to learn an unsuper-
vised gaze representation indirectly via the joint train-
ing of two networks, a gaze estimation and a gaze
transfer network. Although this work emphasizes on
the gaze estimation performance, it worth mentioning
that a highly precise gaze transfer network has also
been trained in unsupervised way. Figure 4 illustrates
the gaze transfer results based on image pairs from
Columbia and UTMultiview databases. The first row
corresponds to the input images, while the second and
third rows to the target and generated images respec-
tively. As can be seen, the network achieves precise
gaze transfer between the image pairs.
Few-Shot Gaze Estimation via Gaze Transfer
811

4.3 Ablation Study
In order to investigate the contribution of each part
of the propose framework to the final accuracy we
perform experiments on Columbia database. Specif-
ically, we studied the impact of fine-tuning the gaze
estimation network using the calibration samples, as
well as, the impact of importing the head pose infor-
mation to the final performance. Results presented
on Table 3 demonstrate the importance of these parts.
Specifically, the head pose information increases ac-
curacy by 1.2
o
, while the fine-tuning of the network
adds 1.8
o
more accuracy increase.
Finally, we studied the impact of the applied gaze-
preserving transformation of Eq. (2) to the reference
images. Results showed an accuracy decrease of 1.6
o
(from 6.1
o
to 7.7
o
) after removing this step, revealing
that this step is crucial in order to disentangle the gaze
feature from the eye-related features.
5 CONCLUSIONS
In this paper a few-shot gaze estimation method was
introduced. In order to overcome the dependency of
the labeled data, the proposed framework aimed to
learn an unsupervised gaze representation via the joint
training of a gaze transfer and a gaze estimation net-
work. Only few calibration samples were enough to
fine-tune the gaze estimation network with promis-
ing accuracy results. Extensive evaluation of the pro-
posed method was performed on two publicly avail-
able databases. A comparison with existing few-shot
gaze estimation methods demonstrated a significant
improvement in accuracy in within-dataset experi-
ments. Also, the benefits of every individual step of
the proposed framework to the achieved performance
were highlighted. The validity of this work makes us
believe that this approach can be used as a pretraining
process in order to exploit the great amount of the ex-
isting unlabeled data and become less dependent from
the labeled ones.
ACKNOWLEDGEMENTS
This research has been co-financed by the Euro-
pean Union and Greek national funds through the
Operational Program Competitiveness, Entrepreneur-
ship and Innovation, under the call RESEARCH –
CREATE – INNOVATE (project SignGuide, code:
T2EDK - 00982)
REFERENCES
Caron, M., Bojanowski, P., Joulin, A., and Douze, M.
(2018). Deep clustering for unsupervised learning of
visual features. In European Conference on Computer
Vision (ECCV), pages 132–149.
Chen, M., Jin, Y., Goodall, T., Yu, X., and Bovik, A. C.
(2020). Study of 3d virtual reality picture quality.
IEEE Journal of Selected Topics in Signal Processing,
14:89–102.
Cheng, Y., Lu, F., and Zhang, X. (2018). Appearance-based
gaze estimation via evaluation-guided asymmetric re-
gression. In European Conference on Computer Vi-
sion (ECCV), pages 100–115.
Crawford, E. and Pineau, J. (2019). Spatially invariant un-
supervised object detection with convolutional neural
networks. In AAAI Conference on Artificial Intelli-
gence, pages 3412–3420.
Eckstein, K. M., Guerra-Carrillo, B., Miller Singley, A. T.,
and Bunge, A. S. (2017). Beyond eye gaze: What
else can eyetracking reveal about cognition and cog-
nitive development? Developmental Cognitive Neu-
roscience, 25:69–91.
Gideon, J., S. S. and Stent, S. (2021). Unsupervised multi-
view gaze representation learning. In International
Conference on Computer Vision and Pattern Recog-
nition Workshops (CVPRW), pages 5001–5009.
Grill, J., Strub, F., Altch?, F., Tallec, C., Richemond, P.,
Buchatskaya, E., Doersch, C., Avila Pires, B., Guo, Z.,
Gheshlaghi Azar, M., and Piot, B. (2020). Bootstrap
your own latent-a new approach to self-supervised
learning. In Advances in Neural Information Process-
ing Systems, pages 21271–21284.
Huang, M. X., Li, J., Ngai, G., and Leong, H. V. (2016).
Stressclick: Sensing stress from gaze-click patterns.
In 24th ACM International Conference on Multime-
dia, pages 1395–1404.
Kartynnik, Y., Ablavatski, A., Grishchenko, I., and Grund-
mann, M. (2019). Real-time facial surface geome-
try from monocular video on mobile gpus. In Inter-
national Conference on Computer Vision and Pattern
Recognition Workshops (CVPRW).
Kellnhofer, P., Recasens, A., Stent, S., Matusik, W., and
Torralba, A. (2019). Gaze360: Physically uncon-
strained gaze estimation in the wild. In International
Conference on Computer Vision (ICCV).
Kingma, D. and Ba, J. (2015). Adam: A method for
stochastic optimization. In International Conference
on Learning Representations (ICLR).
Krafka, K., Khosla, A., Kellnhofer, P., Kannan, H., Bhan-
darkar, S., Matusik, W., and Torralba, A. (2016). Eye
tracking for everyone. In International Conference
on Computer Vision and Pattern Recognition (CVPR),
pages 2176–2184.
Lu, F., Sugano, Y., Okabe, T., and Y., S. (2014). Adap-
tive linear regression for appearance-based gaze esti-
mation. IEEE Transactions on Pattern Analysis and
Machine Intelligence (PAMI), 36:2033–2046.
Moriya, T., Roth, H., Nakamura, S., Oda, H., Nagara, K.,
Oda, M., and Mori, K. (2018). Unsupervised segmen-
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
812

tation of 3d medical images based on clustering and
deep representation learning. In Biomedical Applica-
tions in Molecular, Structural, and Functional Imag-
ing, pages 483–489.
Palazzi, A., Abati, D., Calderara, S., Solera, F., and Cuc-
chiara, R. (2019). Predicting the driver’s focus of at-
tention: The dr(eye)ve project. IEEE Transactions
on Pattern Analysis and Machine Intelligence (PAMI),
41:1720–1733.
Park, S., Zhang, X., Bulling, A., and Hilliges, O. (2018).
Learning to find eye region landmarks for remote
gaze estimation in unconstrained settings. In ACM
Symposium on Eye Tracking Research & Applications
(ETRA), pages 1–10.
Poulopoulos, N. and Psarakis, E. (2022a). Deeppupil net:
Deep residual network for precise pupil center local-
ization. In International Conference on Computer Vi-
sion Theory and Applications (VISAPP), pages 297–
304.
Poulopoulos, N. and Psarakis, E. (2022b). A real-time high
precision eye center localizer. Journal of Real-Time
Image Processing, 19:475–486.
Poulopoulos, N., Psarakis, E., and Kosmopoulos, D. (2021).
Pupiltan: A few-shot adversarial pupil localizer. In In-
ternational Conference on Computer Vision and Pat-
tern Recognition Workshops (CVPRW), pages 3128–
3136.
Smith, B., Yin, Q., Feiner, S., and Nayar, S. (2013). Gaze
locking: passive eye contact detection for human-
object interaction. In ACM Symposium on User Inter-
face Software and Technology (UIST), pages 271–280.
Sugano, Y., Matsushita, Y., and Sato, Y. (2014). Learning-
by-synthesis for appearance-based 3d gaze estimation.
In International Conference on Computer Vision and
Pattern Recognition (CVPR), pages 1821–1828.
Sun, Y., Z. J. S. S. and Chen, X. (2021). Cross-encoder for
unsupervised gaze representation learning. In Interna-
tional Conference on Computer Vision (ICCV), pages
3702–3711.
Wang, K. and Ji, Q. (2018). 3d gaze estimation without ex-
plicit personal calibration. Developmental Cognitive
Neuroscience, 79:216–227.
Wood, E., Baltrusaitis, T., Morency, L., Robinson, P., and
Bulling, A. (2016). Learning an appearance-based
gaze estimator from one million synthesized images.
In ACM Symposium on Eye Tracking Research & Ap-
plications (ETRA), pages 131–138.
Wood, E., Baltrusaitis, T., Zhang, X., Sugano, Y., Robin-
son, P., and Bulling, A. (2015). Rendering of eyes
for eye-shape registration and gaze estimation. In In-
ternational Conference on Computer Vision (ICCV),
pages 3756–3764.
Yu, Y. and Odobez, J. (2020). Unsupervised representation
learning for gaze estimation. In International Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 7314–7324.
Zhang, X., Sugano, Y., and Bulling, A. (2019). Evalu-
ation of appearance-based methods and implications
for gaze-based applications. In CHI conference on hu-
man factors in computing systems, pages 1–13.
Zhang, X., Sugano, Y., Fritz, M., and Bulling, A. (2017).
It’s written all over your face: Full-face appearance-
based gaze estimation. In International Conference on
Computer Vision and Pattern Recognition Workshops
(CVPRW), pages 51–60.
Zheng, Y. ad Park, S., Zhang, X., De Mello, S., and
Hilliges, O. (2020). Self-learning transformations for
improving gaze and head redirection. In Advances in
Neural Information Processing Systems (NIPS), pages
13127–13138.
Few-Shot Gaze Estimation via Gaze Transfer
813
