
InsectDSOT: A Neural Network for Insect Detection in Olive Trees
Lotfi Souifi
1
, Afef Mdhaffar
1,2
, Ismael Bouassida Rodriguez
1
, Mohamed Jmaiel
1,2
and Bernd Freisleben
3
1
ReDCAD Laboratory, ENIS, University of Sfax, B.P. 1173 Sfax, Tunisia
2
Digital Research Center of Sfax, 3021 Sfax, Tunisia
3
Dept. of Math. & Comp. Sci., Philipps-Universit
¨
at Marburg, Germany
fi fi
Keywords:
Deep Learning, Object Detection, Insect Detection, Yolov5, RepVGG.
Abstract:
Controlling insect pests in agricultural fields is a major concern. Despite technological developments, most
farm management methods and technologies still rely on experts for management and do not yet match the
criteria required for precise insect pest control. In this paper, we present a neural network approach for detect-
ing and counting insects. Using the Yolov5n 6.1 version as a baseline model, this paper proposes replacing the
Conv layers in the original model’s backbone and neck with the RepVGG layer. We use transfer learning to
improve performance by training our proposal on the MS COCO dataset and then use the output model of this
training as the input of our new training. Our proposal is validated using the DIRT (Dacus Image Recognition
Toolkit) dataset. The obtained results demonstrate that our approach, based on an improved Yolov5, achieves
86.1% of precision. It outperforms four versions of the original yolov5 and yolov5-based versions with modi-
fied backbones based on lightweight models.
1 INTRODUCTION
Insects, pests, diseases, and weed infestations are
estimated to harm 40% of agricultural productivity
(Carvajal-Yepes et al., 2019). At least $220 billion
is spent annually on the global economy by plant dis-
eases, and at least $70 billion is spent annually on in-
vasive insects (FAO, 2021). Therefore, it is crucial
to detect insects and precisely count their numbers to
propose an adequate spraying strategy. For small tar-
gets like insect pests, the detection ability is currently
inadequate for three reasons. First, there is a lack of
information. Indeed, minor items take up fewer pixels
in the image and have less information, making it dif-
ficult to extract important characteristics without be-
ing influenced by the underlying surroundings. Sec-
ond, the positional precision requirements are strin-
gent. The offset of the bounding box is high for the
inaccuracy of tiny target identification, whether in the
training or prediction phases. Third, there is the ob-
ject aggregation difficulty. When this happens, targets
are aggregated into one point after being presented to
the deep feature map via repeated downsampling, re-
sulting in the inability to differentiate between sep-
arate objects. Furthermore, it will make regressing
the bounding boxes and converging the model harder.
Moreover, the accuracy of the lightweight model is
typically low when compared to other models.
Some studies use one of the two following ap-
proaches to tackle the problem of low accuracy in the
lightweight model. The first approach consists of us-
ing databases (Yang et al., 2021), which includes pho-
tos of insects at enormously large sizes. The disad-
vantage of this approach is that the output model per-
forms poorly, particularly under real-world settings.
The second approach consists of adding more lay-
ers to existing models and/or combining them with
a new feature extractor from another technique. The
downside of this approach is that the output model
size generally increases. The second approach is used
by (Li et al., 2021b; He et al., 2019; Cardoso et al.,
2022). (Li et al., 2021b) integrated EfficientNet and
Yolo. The precision improvement is around 5%, but
the output model size is nearly 60 MB, which is con-
sidered to be large for edge deployment. (He et al.,
2019), employed three meta-architectures (Faster R-
CNN (Girshick, 2015), R-FCN (Dai et al., 2016), and
SSD (Liu et al., 2016)) in conjunction with feature ex-
tractors (ResNet (He et al., 2016), Inception (Szegedy
et al., 2017), and MobileNet (Howard et al., 2017)) to
select the best model while taking the mean average
precision (mAP) into account. Their technique has
334
Souifi, L., Mdhaffar, A., Rodriguez, I., Jmaiel, M. and Freisleben, B.
InsectDSOT: A Neural Network for Insect Detection in Olive Trees.
DOI: 10.5220/0011789600003393
In Proceedings of the 15th International Conference on Agents and Artificial Intelligence (ICAART 2023) - Volume 2, pages 334-342
ISBN: 978-989-758-623-1; ISSN: 2184-433X
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

the drawback of having a low mAP (77%). (Cardoso
et al., 2022) evaluated four basic models: Faster R-
CNN, Yolov4 (Bochkovskiy et al., 2020), and Yolov5
(in small and large versions). The average precision
(AP) in three of the four selected models is low (i.e.,
approximately 80%) and the size of the final model is
too large for edge devices (i.e., 167 MB).
In this paper, we adopt the second approach to de-
velop a neural network, called InsectDSOT, for de-
tecting and counting insects. Using the Yolov5n 6.1
version as a baseline model, we replace the Conv lay-
ers in the original model’s backbone and neck with
a RepVGG layer. We use transfer learning to im-
prove performance by training our proposal on the
MS COCO dataset and then use the output model of
this training as the input of our new training. The
model’s accuracy is improved significantly. The size
of the resulting model is increased by 0.5 MB, which
is reasonable for edge deployment. We test our hy-
pothesis using a variety of backbones, including mo-
bileNet series, ShuffleNet series, Yolov3, Yolo5Face,
EfficientLite, PPLC, GhostNet, Global Context, on
the DIRT dataset of olive insects. Our experimen-
tal results demonstrate the usefulness of our proposal
in terms of precision, without increasing significantly
the model size.
The remainder of the paper is organized as fol-
lows. Section 2 provides an overview of related work.
Section 3 describes our proposal. Section 4 describes
our experiments. Section 5 concludes this paper and
outlines areas for future research.
2 RELATED WORK
(Chen et al., 2022) used MobileNetv3 (Howard et al.,
2019) with Yolov5 to detect airplanes in real time.
The difficulty with their technique is that the sug-
gested model accuracy is very weak, falling below
60%. (Hou et al., 2022) proposed M-YOLO, an
infrared object detector created by combining Mo-
bileNetv2 (Sandler et al., 2018) with Yolov4. The
accuracy of the proposed model is low, indicating a
flaw in their technique. (Qi et al., 2021) proposed
YOLO5Face, a face detector based on YOLOv5.
This technique achieves good results and outperforms
other models when dealing with face identification, in
terms of size and performance. This method has not
been applied in the identification of small objects, par-
ticularly insects. (Liu et al., 2021) proposed combin-
ing the Global Context Network with Yolov3 (Red-
mon and Farhadi, 2018). Six out of 24 types of insects
respond well to this approach (i.e., the same charac-
teristic of those six is that their size is big compared
with the others). Their model’s mean average preci-
sion is insufficient. (Qian et al., 2022) proposed using
EffientNet-Lite (Tan and Le, 2019) as the backbone
of their method. The authors validated their tech-
nique by testing it with five different backbones: Mo-
bileNetv3Small, GhostNet (Han et al., 2020), Shuf-
fleNetV2 (Ma et al., 2018), and PP-LCNet (Cui et al.,
2021). The findings demonstrate that all the other
models produce inferior outcomes when compared to
their suggestion.
Yolov3 is used by (Li et al., 2021a) with data gath-
ered from the Internet. The flaw in this method is
that the resolution of the image characteristics, such
as light and insect size, may differ from the real en-
vironment. In contrast to (Li et al., 2021a), (Bjerge
et al., 2022; Tresson et al., 2019) implemented their
method in the real world while using expensive ma-
terials. (Takimoto et al., 2021) combines two detec-
tion and classification approaches which are Yolov4
alongside with EfficientNet in their study. (Mamdouh
and Khattab, 2021) proposed a system for detecting
and counting olive flies using an enhanced version of
Yolov4. The suggested model’s drawback is that it has
a poor accuracy (84%) that can be improved. (Cabr-
era and Villanueva, 2022) used Yolov5 in its default
configuration without any additional changes. The
size of the insects in the images used by (Yuan et al.,
2021) was at least 30%, which is much larger than
what would be found in the real world (in some cases,
the percentage of insects is less than 10%). In our
article, we focus on the YOLO (Yolov5) detector, a
one-stage anchor-based detector. Each deep learning
model typically has benefits and drawbacks as feature
extractors. Some models were created using feature
extractors from already-built models, like SSD (Sin-
gle Shot multi box Detector), which was suggested
using the VGG16 feature extractor. Numerous stud-
ies have been conducted about combining model ad-
vantages to overcome other models’ disadvantages.
ResNet (and its variations), MobileNet (and its vari-
ations), and InceptionNet were the three models that
were most often used as backbones. The target mod-
els, such as SSD (Patel and Bhatt, 2019) (SSD with
Inception and MobileNet) and Yolo (Zha et al., 2021)
(uses Yolo with MobileNet), were both single-stage
detectors. Additionally, there are two stage detectors
like Faster R-CNN (Teng et al., 2022) (uses Faster-
RCNN with ResNet50). To summarize, most extant
one-stage object identification methods use feature
fusion to increase the accuracy of tiny objects. The
main explanation for this is that low-level feature map
semantic information is sparse but correct in present-
ing object position, while high-level feature semantic
information is abundant but inaccurate.
InsectDSOT: A Neural Network for Insect Detection in Olive Trees
335
3 InsectDSOT
This section presents the original architecture of
Yolov5 and the core principles of the RepVGG block.
Also, we present InsectDSOT, our improved Yolov5
for insect detection.
3.1 Architecture of Yolo
Yolov5 has undergone various modifications since its
initial release in 2020. For example, the adoption of
the C3 layer was the most significant enhancement
in version 4 (Jocher et al., 2021a). Also in version
6 (Jocher et al., 2021b), the nano version sugges-
tion, which is the basis of our approach. Furthermore,
some other enhancements were recently incorporated
in versions 6.1 (Jocher et al., 2022a) and 6.2 (Jocher
et al., 2022b). The version used in our experiment is
6.1 since the last version (6.2) included classification
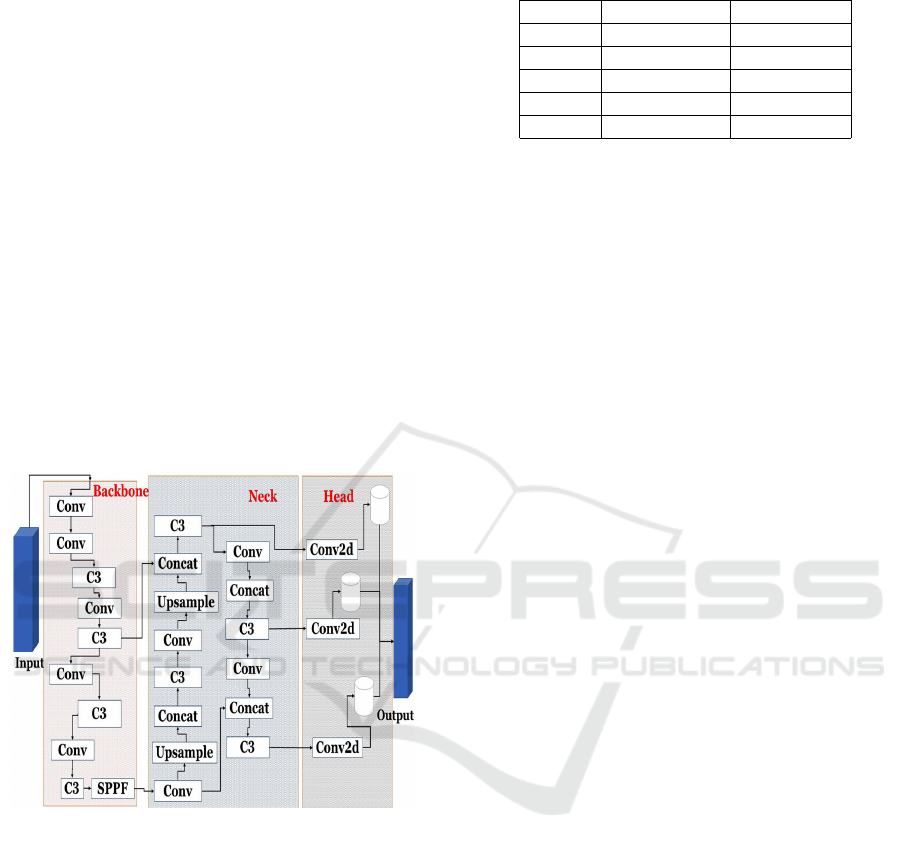
and we just focus on detection. The Yolov5 architec-
ture is shown in Figure 1.
Figure 1: Yolov5 v6.1 architecture.
YOLOv5 is available in five versions: YOLOv5n,
YOLOv5s, YOLOv5m, YOLOv5l, and YOLOv5x.
The only difference between the variants is the model
depth and layer width. We chose YOLOv5N because
it has the smallest depth and feature map width, as
well as the quickest training time. Also, the result of
our proposal is a lightweight model that can be de-
ployed on both edge devices and servers. The other
three are expanded and deeper variants of YOLOv5s.
Table 1 lists the features of each Yolov5 version.
3.2 RepVGG Model
According to (Ding et al., 2021), many advanced
ConvNets outperform basic ConvNets in terms of ac-
curacy, despite having significant limitations, such as:
Table 1: Yolo’s versions: depth and width.
Yolov5 model depth layer width
N 0.33 0.25
S 0.33 0.5
M 0.67 0.75
L 1.0 1.0
X 1.33 1.25
(i) complex multi-branch designs (for example, resid-
ual addition in ResNet) make the model harder to de-
velop and adapt, slow inference, and decrease mem-
ory consumption; (ii) some modules increase memory
access costs and do not support a variety of devices
(e.g., depthwise conv in MobileNets). The authors
suggest RepVGG as a solution to these restrictions,
RepVGG is a strong convolutional neural network ar-
chitecture with a VGG-like inference-time body (Si-
monyan and Zisserman, 2014) made up of basically
a stack of 3 × 3 convolution and ReLU. While it can
reach the accuracy and speed of multi-branch compli-
cated networks, we chose RepVGG-A0 since it has
the fewest network parameters among the RepVGG
configurations. Nonetheless, the RepVGG-A0 net-
work has a considerable network size and high recog-
nition accuracy (it can identify 1000 images classes in
the ImageNet-2012 test set with a Top-1 accuracy of
72.41%). RepVGG provides the following benefits:
• The model features a VGG-like plain (also known
as feed-forward) topology 1 (i.e., each layer takes
the output of the previous layer as input and feeds
it into the next layer).
• The model’s body mainly makes use of 3×3 conv
and ReLU.
• No automatic search (Zoph et al., 2018), manual
refinement (Radosavovic et al., 2020), compound
scaling (Tan and Le, 2019), or other heavy designs
are used to instantiate the concrete architecture
(including the particular depth and layer widths).
The differences between the ResNet and RepVGG
designs, as well as the RepVGG inference, are de-
picted in Figure 2:
• (A) ResNet: It has a multi-path topology during
training and inference, which causes it to be ex-
tremely slow and memory-inefficient.
• (B) RepVGG Training: It only acquired multi-
path topology during training.
• (C) RepVGG Inference: It only has a single-path
topology during inference, allowing a quick infer-
ence time.
RepVGG employs ResNet-like identity and 1 × 1
branches to ensure that a building block’s training-
time information flow is y = x+g(x)+ f (x), as in (B).
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
336
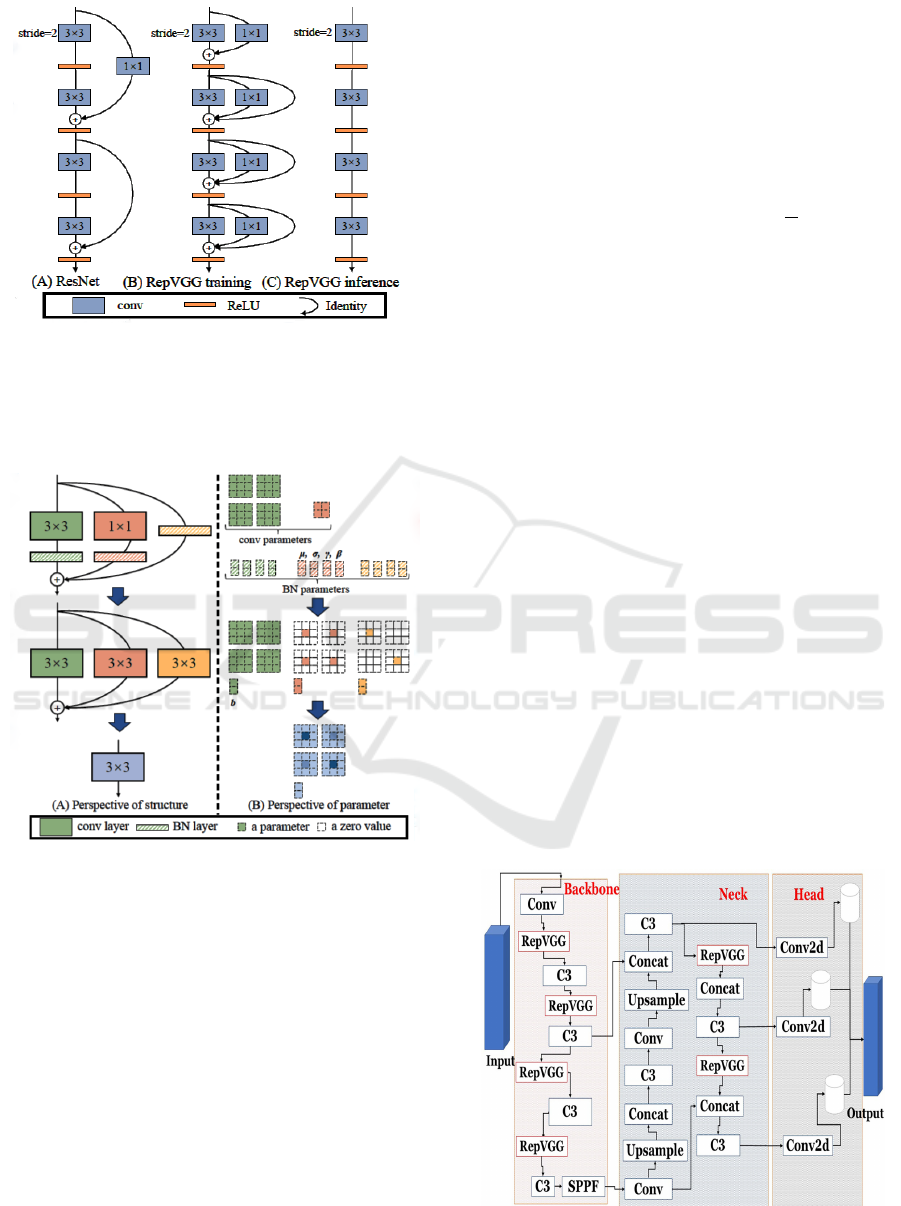
Figure 2: Difference between RepVGG and ResNet archi-
tecture.
From the same point of view as (Veit et al., 2016), the
model is transformed into an aggregation of 3
n
mem-
bers with n such blocks.
Figure 3: A RepVGG block’s hierarchical re-
parameterization.
To move from (B) to (C), RepVGG employs the
concept of re-parameterization to turn a learned block
into a single 3 × 3 convolutional layer for inference.
It is important to note that batch normalization (BN).
(Ioffe and Szegedy, 2015) is used before the addition
for each branch. The concept of re-parameterization
employs W
(3)
∈ R
C
1
×C
2
×3×3
to represent the kernel
of a 3 × 3 conv layer with C
1
input and C
2
out-
put channels, and W
(1)
∈ R
C
1
×C
2
for the kernel of
1 × 1. We utilise α
(3)
, σ
(3)
, γ
(3)
, β
(3)
as the accumu-
lated mean, standard deviation and learned scaling
factor and bias of the BN layer following 3 × 3 conv,
α
(1)
, σ
(1)
, γ
(1)
, β
(1)
for the BN following 1 × 1 conv,
and α
(0)
, σ
(0)
, γ
(0)
, β
(0)
for the identity branch. Let
M
(1)
∈ R
C
1
×N×H
1
×W
1
, M
(2)
∈ R
C
2
×N×H
2
×W
2
, be the
source and result, and ∗ be the convolution operator,
if C
1
= C
2
, H
1
= H
2
, and W
1
= W
2
we have:
M
(2)
= bn(M
(1)
∗W
(3)
, α
(3)
, σ
(3)
, γ
(3)
, β
(3)
+bn(M
(1)
∗W
(1)
, α
(1)
, σ
(1)
, γ
(1)
, β
(1)
)
+bn(M
(1)
, α
(0)
, σ
(0)
, γ
(0)
, β
(0)
)).
(1)
where bn in is the inference-time BN function:
bn(M, λ, σ, γ, β)
:,i,:,:
= (M
:,i,:,:
− µ
i
)
γ
i
γ
i
+ β
i
. (2)
The final bias is obtained by summing the three
bias vectors, and the final 3 × 3 kernel is obtained by
putting the 1*1 kernels into the central point of the
3 × 3 kernel, which is readily achieved by first zero-
padding the two 1 × 1 kernels to 3 × 3 and adding the
three kernels up, as illustrated in Figure 3. As shown
in Figure 3, we assume C
2
= C
1
= 2 for clarity, there-
fore the layer contains four 3×3 matrices and the ker-
nel of the 1 × 1 layer is a 2 × 2 matrix.
3.3 The Architecture of InsectDSOT
We used the Yolov5 model as the base model and used
the RepVGG as a feature extractor. Since the primary
purpose of the RepVGG block is to overcome some
of the drawbacks of ConvNets, we replace the Conv
layers in the first part (backbone) of the Yolo, as well
as the final two Conv layers in the second part (Neck)
of the Yolov5 with RepVGG block. We only main-
tained three original Conv layers: one in the initial
input of the model, and the others two are in the are
in the model’s Neck and have no direct influence on
the model output. We opted to retrain them. Figure
4 illustrates the original Yolo’s architecture, with the
changed blocks of our InsectDSOT approach high-
lighted in red.
Figure 4: Modified Yolo version based on RepVGG block.
InsectDSOT: A Neural Network for Insect Detection in Olive Trees
337

4 EXPERIMENTS
This section describes the used dataset, the conducted
experiments, and the obtained results.
4.1 Dataset
Our experiments are conducted on the DIRT (i.e.,
Dacus Image Recognition Toolkit) dataset (Kalama-
tianos et al., 2018). The liquid-based pheromone
McPhail traps are used to collect the DIRT images.
Soup images are produced when olive fruit flies are
trapped in liquid pheromone. There are 848 images
in the dataset. At least one olive fruit fly is shown
in every picture in DIRT. Originally, the dataset had
three classes: dacus, dacus male, and dacus female.
In our situation, we only consider the first class. Fig-
ures 5 and 6 depict two samples of the original DIRT
dataset and two samples of the augmented dataset, re-
spectively.
Figure 5: Original images of the DIRT dataset.
We removed several images from the augmented
dataset since they are not compatible with our criteria
(i.e., the size of insects in photos is bigger than 10%
of the entire image size). The augmented dataset has
3877 images.
Figure 6: Augmented dataset: examples images.
Deep learning models often require a large amount
of training data to generate effective results. There-
fore, we applied data augmentation techniques. The
original 848 images were separated into three groups:
the training set (552 photos), the validation set (170
photos), and the final test set (126 photos). Then, we
enhanced all the sets by combining them with zoom-
ing (from 10% to 40%), and rotation (from 10% to
60%) on each photo to get extra training and testing
examples. After the augmentation, we have around
3877 pictures divided as follows: 2520 images for
training, 775 images for validating, and 582 images
for testing.
Table 2: Number of images in DIRT dataset.
Training Validation Final Test Total
DIRT 552 170 126 848
After DA 2520 775 582 3877
In this paper, we used Google Colab to train each
deep learning model for 100 epochs. We adopted the
standard hyperparameters, considering our study is
not focused on them. The standard hyperparameters
are: learning rate (lr) = 0.01; IoU training threshold =
0.2; obj loss gain = 1.0; class loss gain = 0.5.
4.2 Experimental Results
According to (Fawcett, 2006), the evaluation matrix
of the object detection matrix is based on: (i) True
Positives (TP): is the number of detected insects that
are detected as target insects; (ii) False Negatives
(FN): is the number of target insects that are not de-
tected; (iii) True Negatives (TN): is the number of
non-target insect that are not detected as target in-
sects; (vi) False Positives (FP): is the number of non-
target insect that are detected as target insects.
The above criteria need a definition in terms of
what constitutes a right detection and a wrongly de-
tection. One frequent method is to use the intersection
over union (IOU). In the object detection scope, the
IOU divides the area of union between the predicted
bounding box B
p
and the ground-truth bounding box
B
gt
by the overlapping area between them.
IOU =
area(B
p
∪ B
gt
)
area(B
p
∩ B
gt
(3)
We can characterize a detection as correct or
wrong by comparing the IOU to a defined threshold t.
If IOU ≥ t, the detection is considered to be correct.
If IOU < t, the detection is considered mistaken.
The remaining elements of the confusion ma-
trix are as follows: True Positive Rate (TPR):(also
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
338
known as sensitivity) is the measure of correctly de-
tected insect.
T PR =
T P
(T P + FN)
(4)
True Negative Rate (TNR): (also known as speci-
ficity) is the measure of non insects that were cor-
rectly not detected and is expressed as follows:
T NR =
T N
(T N + FP)
(5)
Positive Predictive Value (PPV): (or precision) de-
scribes how much of the correctly detected labels are
truly positive and is expressed as follows:
PPV =
T P
(T P + FP)
(6)
Accuracy (ACC): is defined as the number of accu-
rately identified insects or non-insects divided by the
total number of insects and is expressed as follows:
ACC(%) =
(T N + T P)
(T N + T P + FN + FP)
× 100 (7)
4.2.1 Yolov5 Performance
First, we trained the original version of Yolov5 on the
DIRT dataset, in order to compare it to our proposal.
Table 3 shows obtained results in terms of precision,
recall, mAP, and model’s size.
Table 3: Original Yolov5: Augmented DIRT Dataset.
Models Name Pr% R % mAP % Size (MO)
Yolo N 82.9 81.4 84.4 3.9
Yolo S 83.9 83.7 85.2 14.4
Yolo M 85.1 84.2 85.7 42.3
Yolo L 86.0 84.6 86.2 92.9
Yolo X 86.4 85.5 87.7 173.3
As shown in Table 3, the main difference between
all versions is their size in comparison to their out-
put performance. The difference in accuracy between
versions X and N is 3.5%, but the size difference is
over 45 times greater.
4.2.2 Evaluation of InsectDSOT
We focused on selecting lightweight feature extrac-
tion models with a limited set of trainable parameters.
This is primarily done to support a real-world appli-
cation by increasing the effectiveness of the feature
extraction step and assisting in lowering the amount
of data needed for fine-tuning. Deeper networks may
also have difficulties during training as a result of is-
sues like vanishing gradients brought on by the in-
creased network depth. When it comes to the employ-
ment of backbones, we choose one of two approaches:
• First: remove the previous backbone and replace
it with the new backbone. In contrast to our
method and the Global Context block, most of the
used backbones adopt this strategy.
• Second: replace only a section of the backbone
with the new block from the new model. This
method is used for both the Global Context and
our proposal.
In the case of RepVGG, we use both methodologies
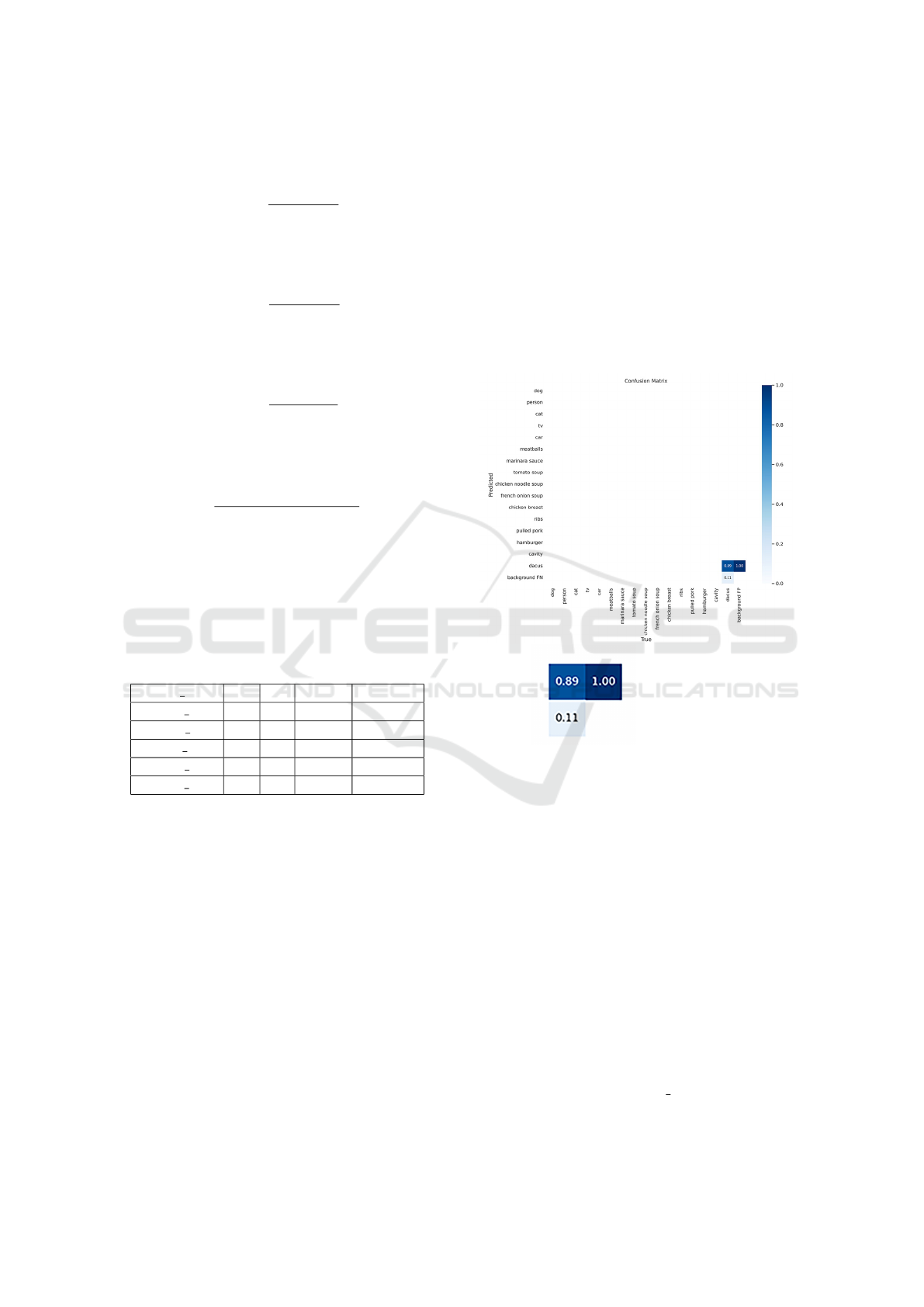
in order to compare their outcomes. The confusion
matrix is shown in Figure 7.
Figure 7: Confusion Matrix of Yolov5 N with TR.
Table 4 displays the outcomes of both approaches.
We now compare our proposal to Yolov5’s origi-
nal versions and other Yolov5 models. We adhere to
the principle of transfer learning (TL). In our case, we
used the MS COCO (Microsoft Common Object in
Context) benchmark dataset (Lin et al., 2014) to train
our model and then use the output model as a pre-
trained weight for further training. As a disadvantage
of using TL, only the precision of the model is raised;
the recall of our model is decreased by 1.2%, which
seems reasonable when compared to the 2.6% gain in
precision. Table 4 demonstrates that not all models
perform well on tiny object detection. Some mod-
els outperform others in terms of performance. Shuf-
fleNet and his two variants perform poorly in contrast
to Yolo5Face, even though his output size, which is
less than 1 MB, performs well enough in our dataset.
We included InsectDSOT S, a larger configura-
tion of our proposal, to outperform all Yolov5 ver-
InsectDSOT: A Neural Network for Insect Detection in Olive Trees
339
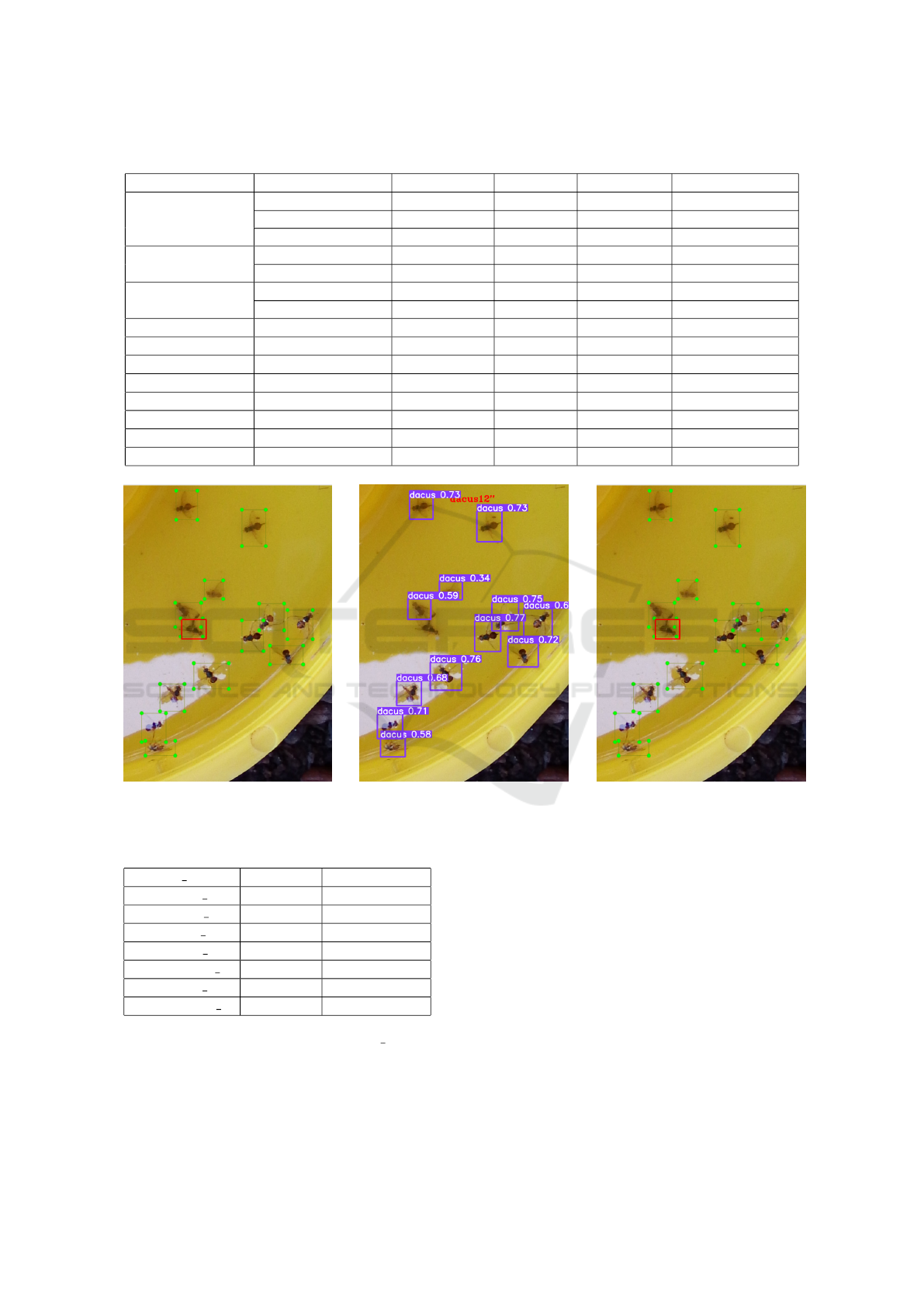
Table 4: Comparison between used backbones.
Model Backbone Version Precision % Recall % mAP0.5 % mAP0.5-0.95 %
MobileNet
V2 79.2 78.7 82.4 31.7
V3 Small 78.3 77.3 80.1 29.3
V3 Large 81.4 79.2 84.5 31.1
ShuffleNet
V1 74 72.4 77.3 26.7
V2 74.5 75.3 78.3 26.8
Yolo5Face
BlazeFace 79.9 82.5 83.8 30.1
BlazeFPN 77 77.5 78.7 28.8
EfficientNEt EfficientNEt Lite 79.4 81.3 84.2 32.4
PPLC PPLC 80.1 78.8 82 30.3
RepVGG Entire RepVGG 83.6 82.9 86.2 34
GhostNet GhostNet 82.8 82.5 85.2 31.7
Yolov3 Yolov3 83.7 82.5 86.2 32.6
Global Context GC Net 80.5 84.1 85.2 30.8
InsectDSOT RepVGG 83.5 85.1 86.4 33.7
InsectDSOT+TL RepVGG 86.1 83.9 86.4 33.7
(a) Image in labeling program. (b) Output of our model. (c) Difference between two images.
Figure 8: Detected Image.
Table 5: Our proposal compared with original Yolov5.
Model Name Size (Mo) Precision (%)
Original N 3.9 82.9
Original S 14.4 83.3
Original M 42.3 85.1
Original L 92.9 86.0
InsectDSOT N 4.4 86.1
Original X 173.3 86.4
InsectDSOT S 15.4 87.0
sions. In terms of accuracy, InsectDSOT S outper-
forms Yolov5x by 0.6%. Table 5 displays the size and
precision of all models (Yolov5 and our InsectDSOT),
sorted from worst to best in terms of precision.
The image in Figure 8 was randomly selected
from the test dataset. 13 target insects were identi-
fied in the original image by experts in the labeling
process. We executed the detection procedure with
our proposal. The second image displays the output
image, which shows that our model successfully iden-
tified 12 out of 13 insects, which is a very good result.
The unidentified insect in the previous image has a
red rectangle around it to draw attention to it. We
built auto-counting into the model’s head. As a conse-
quence, the insect’s name and the number of detected
insects are added on top of the image, in addition to
the regular detection.
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
340

5 CONCLUSION
We presented InsectDSOT, an improved version of
Yolov5 for insect detection. The proposed approach
replaces the Conv layers in the original model’s back-
bone and neck with the RepVGG layer. We use trans-
fer learning to improve performance by (i) training
our proposal on the MS COCO dataset and then (ii)
using the output model of this training as the input of
our new training. Our proposal has been validated,
using the DIRT (Dacus Image Recognition Toolkit)
dataset. The obtained results demonstrate that our
approach, based on an InsectDSOT, achieved 86.1%
precision. It outperforms four versions of the origi-
nal yolov5 and yolov5-based versions with modified
backbones, based on lightweight models. InsectD-
SOT achieved good results in terms of precision and
recall, when compared to the other approaches.
In the future, we plan to collect a dataset that in-
cludes many types of olive insects. Also, we will de-
ploy our model on edge devices. Furthermore, since
the classifications approach is included in the most re-
cent Yolov5 release, we plan to include this function
into our model, as nature does not only have one type
of insect-pest that might damage olive trees.
ACKNOWLEDGEMENTS
This work is supported by the German Academic Ex-
change Service (DAAD), Germany (Transformation
Partnership: OLIVIA Project).
REFERENCES
Bjerge, K., Mann, H. M., and Høye, T. T. (2022). Real-time
insect tracking and monitoring with computer vision
and deep learning. Remote Sensing in Ecology and
Conservation, 8(3):315–327.
Bochkovskiy, A., Wang, C.-Y., and Liao, H.-Y. M. (2020).
Yolov4: Optimal speed and accuracy of object detec-
tion. arXiv preprint arXiv:2004.10934.
Cabrera, J. and Villanueva, E. (2022). Investigating gener-
ative neural-network models for building pest insect
detectors in sticky trap images for the peruvian horti-
culture. In Annual International Conference on Infor-
mation Management and Big Data, pages 356–369.
Springer.
Cardoso, B., Silva, C., Costa, J., and Ribeiro, B. (2022).
Internet of things meets computer vision to make an
intelligent pest monitoring network. Applied Sciences,
12(18):9397.
Carvajal-Yepes, M., Cardwell, K., Nelson, A., Garrett,
K. A., Giovani, B., Saunders, D. G., Kamoun, S.,
Legg, J., Verdier, V., Lessel, J., et al. (2019). A
global surveillance system for crop diseases. Science,
364(6447):1237–1239.
Chen, Y., Yang, J., Wang, J., Zhou, X., Zou, J., and Li,
Y. (2022). An improved yolov5 real-time detection
method for aircraft target detection. In 2022 27th In-
ternational Conference on Automation and Comput-
ing (ICAC), pages 1–6. IEEE.
Cui, C., Gao, T., Wei, S., Du, Y., Guo, R., Dong, S., Lu, B.,
Zhou, Y., Lv, X., Liu, Q., et al. (2021). Pp-lcnet: A
lightweight cpu convolutional neural network. arXiv
preprint arXiv:2109.15099.
Dai, J., Li, Y., He, K., and Sun, J. (2016). R-fcn: Object de-
tection via region-based fully convolutional networks.
Advances in neural information processing systems,
29.
Ding, X., Zhang, X., Ma, N., Han, J., Ding, G., and Sun,
J. (2021). Repvgg: Making vgg-style convnets great
again. 2021 IEEE/CVF Conference on Computer Vi-
sion and Pattern Recognition (CVPR), pages 13728–
13737.
FAO (2021). Food and agriculture organization of the
united nations. https://www.fao.org/news/story/en/
item/1402920/icode/. Accessed: 2022-10-25.
Fawcett, T. (2006). An introduction to roc analysis. Pattern
recognition letters, 27(8):861–874.
Girshick, R. B. (2015). Fast r-cnn. 2015 IEEE International
Conference on Computer Vision (ICCV), pages 1440–
1448.
Han, K., Wang, Y., Tian, Q., Guo, J., Xu, C., and Xu, C.
(2020). Ghostnet: More features from cheap opera-
tions. In Proceedings of the IEEE/CVF conference on
computer vision and pattern recognition, pages 1580–
1589.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 770–778. IEEE.
He, Y., Zeng, H., Fan, Y., Ji, S., and Wu, J. (2019). Ap-
plication of deep learning in integrated pest manage-
ment: A real-time system for detection and diagnosis
of oilseed rape pests. Mobile Information Systems,
2019.
Hou, Z., Sun, Y., Guo, H., Li, J., Ma, S., and Fan, J. (2022).
M-yolo: an object detector based on global context
information for infrared images. Journal of Real-Time
Image Processing, pages 1–14.
Howard, A., Sandler, M., Chu, G., Chen, L.-C., Chen, B.,
Tan, M., Wang, W., Zhu, Y., Pang, R., Vasudevan, V.,
et al. (2019). Searching for mobilenetv3. In Pro-
ceedings of the IEEE/CVF international conference
on computer vision, pages 1314–1324.
Howard, A. G., Zhu, M., Chen, B., Kalenichenko, D.,
Wang, W., Weyand, T., Andreetto, M., and Adam,
H. (2017). Mobilenets: Efficient convolutional neu-
ral networks for mobile vision applications. arXiv
preprint arXiv:1704.04861.
Ioffe, S. and Szegedy, C. (2015). Batch normalization: Ac-
celerating deep network training by reducing internal
covariate shift. In International conference on ma-
chine learning, pages 448–456. PMLR.
InsectDSOT: A Neural Network for Insect Detection in Olive Trees
341

Jocher, G. R., Stoken, A., and Chaurasia, A. (2021a). ul-
tralytics/yolov5: v4.0 - nn.silu() activations. https:
//zenodo.org/record/4418161. Accessed: 2022-11-10.
Jocher, G. R., Stoken, A., and Chaurasia, A. (2021b). ultr-
alytics/yolov5: v6.0 - yolov5n ’nano’ models. https:
//zenodo.org/record/5563715. Accessed: 2022-11-10.
Jocher, G. R., Stoken, A., and Chaurasia, A. (2022a). ul-
tralytics/yolov5: v6.1 - tensorrt, tensorflow edge tpu
and openvino export and inference — zenodo. https:
//zenodo.org/record/6222936.Y3t3Q3bP3IU. Ac-
cessed: 2022-11-10.
Jocher, G. R., Stoken, A., and Chaurasia, A. (2022b).
Yolov5 classification models, apple m1, reproducibil-
ity, clearml and deci.ai integrations. https://zenodo.
org/record/7002879.Y3t3P3b7TIV. Accessed: 2022-
11-10.
Kalamatianos, R., Karydis, I., Doukakis, D., and Avlonitis,
M. (2018). Dirt: The dacus image recognition toolkit.
Journal of Imaging, 4(11):129.
Li, K., Zhu, J., and Li, N. (2021a). Insect detection and
counting based on yolov3 model. In 2021 IEEE 4th
International Conference on Electronics Technology
(ICET), pages 1229–1233. IEEE.
Li, K., Zhu, J., and Li, N. (2021b). Lightweight auto-
matic identification and location detection model of
farmland pests. Wireless Communications and Mobile
Computing, 2021.
Lin, T.-Y., Maire, M., Belongie, S., Hays, J., Perona, P.,
Ramanan, D., Doll
´
ar, P., and Zitnick, C. L. (2014).
Microsoft coco: Common objects in context. In Euro-
pean conference on computer vision, pages 740–755.
Springer.
Liu, Q., Yan, Z., Wang, F., and Ding, C. (2021). Research
on object detection algorithm for small object of pests
based on yolov3. In 2021 International Conference
on Computer Information Science and Artificial Intel-
ligence (CISAI), pages 14–18.
Liu, W., Anguelov, D., Erhan, D., Szegedy, C., Reed, S.,
Fu, C.-Y., and Berg, A. C. (2016). Ssd: Single shot
multibox detector. In European conference on com-
puter vision, pages 21–37. Springer.
Ma, N., Zhang, X., Zheng, H., and Sun, J. (2018). Shuf-
flenet v2: Practical guidelines for efficient cnn archi-
tecture design. In ECCV, volume 11218, pages 122–
138. Springer.
Mamdouh, N. and Khattab, A. (2021). Yolo-based deep
learning framework for olive fruit fly detection and
counting. IEEE Access, 9:84252–84262.
Patel, D. J. and Bhatt, N. (2019). Insect identification
among deep learning’s meta-architectures using ten-
sorflow. Int. J. Eng. Adv. Technol, 9(1):1910–1914.
Qi, D., Tan, W., Yao, Q., and Liu, J. (2021). Yolo5face:
Why reinventing a face detector. ArXiv preprint
ArXiv:2105.12931.
Qian, Y., Miao, Y., Huang, S., Qiao, X., Wang, M., Li, Y.,
Luo, L., Zhao, X., and Cao, L. (2022). Real-time
detection of eichhornia crassipes based on efficient
yolov5. Machines, 10(9):754.
Radosavovic, I., Kosaraju, R. P., Girshick, R., He, K., and
Doll
´
ar, P. (2020). Designing network design spaces.
In Proceedings of the IEEE/CVF conference on com-
puter vision and pattern recognition, pages 10428–
10436.
Redmon, J. and Farhadi, A. (2018). Yolov3: An incremental
improvement. ArXiv, abs/1804.02767.
Sandler, M., Howard, A., Zhu, M., Zhmoginov, A., and
Chen, L.-C. (2018). Mobilenetv2: Inverted residu-
als and linear bottlenecks. In Proceedings of the IEEE
conference on computer vision and pattern recogni-
tion, pages 4510–4520.
Simonyan, K. and Zisserman, A. (2014). Very deep con-
volutional networks for large-scale image recognition.
arXiv preprint arXiv:1409.1556.
Szegedy, C., Ioffe, S., Vanhoucke, V., and Alemi, A. A.
(2017). Inception-v4, inception-resnet and the im-
pact of residual connections on learning. In Thirty-
first AAAI conference on artificial intelligence, pages
4278—-4284. ACM.
Takimoto, H., Sato, Y., Nagano, A. J., Shimizu, K. K.,
and Kanagawa, A. (2021). Using a two-stage con-
volutional neural network to rapidly identify tiny her-
bivorous beetles in the field. Ecological Informatics,
66:101466.
Tan, M. and Le, Q. (2019). Efficientnet: Rethinking model
scaling for convolutional neural networks. In Interna-
tional conference on machine learning, pages 6105–
6114. PMLR.
Teng, Y., Zhang, J., Dong, S., Zheng, S., and Liu, L. (2022).
Msr-rcnn: A multi-class crop pest detection network
based on a multi-scale super-resolution feature en-
hancement module. Frontiers in Plant Science, 13.
Tresson, P., Tixier, P., Puech, W., and Carval, D. (2019).
Insect interaction analysis based on object detection
and cnn. In 2019 IEEE 21st International Workshop
on Multimedia Signal Processing (MMSP), pages 1–6.
IEEE.
Veit, A., Wilber, M. J., and Belongie, S. (2016). Residual
networks behave like ensembles of relatively shallow
networks. Advances in neural information processing
systems, 29.
Yang, Z., Yang, X., Li, M., and Li, W. (2021). Automated
garden-insect recognition using improved lightweight
convolution network. Information Processing in Agri-
culture.
Yuan, Z., Fang, W., Zhao, Y., and Sheng, V. S. (2021).
Research of insect recognition based on improved
yolov5. Journal of Artificial Intelligence, 3(4):145.
Zha, M., Qian, W., Yi, W., and Hua, J. (2021). A lightweight
yolov4-based forestry pest detection method using
coordinate attention and feature fusion. Entropy,
23(12):1587.
Zoph, B., Vasudevan, V., Shlens, J., and Le, Q. V. (2018).
Learning transferable architectures for scalable image
recognition. In Proceedings of the IEEE conference on
computer vision and pattern recognition, pages 8697–
8710.
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
342
