
Automatic Placer for Analog Circuits Using Integer Linear
Programming Warm Started by Graph Drawing
Josef Grus
1,2 a
, Zden
ˇ
ek Hanz
´
alek
2 b
, Dalibor Barri
3 c
and Patrik Vacula
3 d
1
DCE, FEE, Czech Technical University in Prague, Czech Republic
2
IID, CIIRC, Czech Technical University in Prague, Czech Republic
3
STMicroelectronics, Prague, Czech Republic
Keywords:
Placement, Combinatorial Optimization, Analog Integrated Circuit, Rectangle Packing.
Abstract:
Due to its diversity, the physical design of the Analog and Mixed-Signal Integrated Circuits is not as automated
as the physical design of digital Integrated Circuits. The placement process is one of the critical steps of the
physical design, and automating it would significantly shorten the design time. We formulate the placement
process using an Integer Linear Programming approach, with features to support a specific semiconductor
technology. We include an enumeration of possible variants of the circuit’s topological structures, which are
afterward considered during optimization. We use the Gurobi solver to minimize both the approximate wire
length and the placement area. The results were evaluated by layout design experts and compared with manual
designs. We also utilize a graph drawing-based method to generate an initial feasible solution to warm start
the Integer Linear Programming solver, which noticeably improves the performance and shortens the com-
putation time (5x to 15x), and makes the approach applicable even for larger problem instances containing
100 independent elements. Experiments performed on real-life industrial problem instances show that our
graph drawing-enhanced approach can produce high-quality placement in a much shorter time than the de-
signers need.
1 INTRODUCTION AND
RELATED WORK
The physical design, or layout, is one of the most im-
portant steps in Integrated Circuit (IC) design. In the
case of digital ICs, this process has already been suc-
cessfully automated, placing thousands of elements
in a short time. On the other hand, there is no such
industry-accepted automation counterpart in the case
of Analog and Mixed-Signal (AMS) ICs (Scheible
and Lienig, 2015). With increasing demands and the
need to shorten time-to-market for newer analog de-
signs, automating the whole layout process is cur-
rently a highly discussed and important topic both in
academia and in the industry (Scheible and Lienig,
2015). However, due to differences between various
semiconductor technologies, some areas, like BCD
(BIPOLAR-CMOS-DMOS) process, are less auto-
mated than others.
a
https://orcid.org/0000-0002-1136-370X
b
https://orcid.org/0000-0002-8135-1296
c
https://orcid.org/0000-0002-8498-0135
d
https://orcid.org/0000-0001-7288-7729
The placement process is a critical stage of the
physical design. During this stage, the designer de-
termines the positions and orientations of the circuit’s
devices, so there are no overlaps between devices
that would render the entire placement infeasible, and
other constraints are satisfied as well; this shows the
link between the placement problem and combinato-
rial problems like rectangle packing. Our goal is to
minimize both the final area of the ICs as well as the
approximate wire length between devices. We use
a point-to-point (P2P) metric based on the specific
problem statement required by the industry partner
STMicroelectronics to model wire length. The com-
monly used half perimeter wire length (HPWL) met-
ric is also modeled and used for comparison with con-
temporary methods. Design constraints (minimum
distance between devices, blockage areas, aspect ra-
tio, topological structures, symmetries, and isolated
pockets) are also considered to ensure that the result-
ing placement is valid.
Following our industry-specific problem state-
ment, we only consider placement up to the so-called
level 2 topology. Thus, as an input, we consider the
circuit’s netlist, consisting of level 0 topologies (sin-
106
Grus, J., Hanzálek, Z., Barri, D. and Vacula, P.
Automatic Placer for Analog Circuits Using Integer Linear Programming Warm Started by Graph Drawing.
DOI: 10.5220/0011789300003396
In Proceedings of the 12th International Conference on Operations Research and Enterprise Systems (ICORES 2023), pages 106-116
ISBN: 978-989-758-627-9; ISSN: 2184-4372
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

gle devices, e.g., transistors or resistors) and level 1
topologies (sensitive topological structures, e.g., cur-
rent mirrors, differential pairs). The industry experts
provide the assignment of the circuit’s devices to the
specific topological structures in an additional file.
There are several research directions currently ac-
tive in the field of analog placement automation. The
first group of methods uses a topological represen-
tation of the placement - methods such as sequence
pairs and B*-trees, often utilized in packing (Oliveira
et al., 2016), encode relative positions between design
elements. This means that each representation maps
to a solution without infeasible overlaps between de-
sign elements. On the other hand, the more complex
constraints, such as symmetries, are harder to encode,
requiring intricate representation. The search over the
solution space often uses simulated annealing or ge-
netic algorithms. Topological representation was and
still is widely used (Lourenco et al., 2006; Strasser
et al., 2008; Ma et al., 2011; Dhar et al., 2021).
The other research direction considers absolute
representation, where each element is described by
its actual coordinates. While this approach makes it
easy to describe the majority of the constraints, it can
produce infeasible solutions due to the overlapping of
design elements. These include work of (Chen et al.,
2008; Xu et al., 2019a; Xu et al., 2019b; Lin et al.,
2022), which initially determine the global place-
ment using Nonlinear Programming (solved, e.g., by
Nesterov’s method (Nesterov, 1983)), and then pro-
duce feasible placement using Linear Programming
(LP) or other methods. However, simulated annealing
was also used with the absolute representation (Cohn
et al., 1991; Martins et al., 2015).
Other approaches include using Integer Linear
Programming (ILP). The recent hierarchical ILP ap-
proach (Xu et al., 2017) also considers multiple dif-
ferent configurations at each level of the optimization.
Machine learning approaches for the placement prob-
lem are also investigated nowadays (Mirhoseini et al.,
2021; Mallappa et al., 2022). Other methods, like the
Forced-directed approach (Spindler et al., 2008), were
also used for the placement problem.
Our proposed ILP solution derives its core ideas
from approaches used for general rectangle packing
problem (Korf et al., 2010; Berger et al., 2009). Algo-
rithms for strip packing (Alvarez-Valdes et al., 2008)
or other floorplanning problems could also be uti-
lized. Due to its similarity with the proposed place-
ment problem, methods for the Facility Layout Prob-
lem (FLP) also need to be mentioned. Methods for
solving FLP (Kubal
´
ık et al., 2019; Xie and Sahinidis,
2008; Kandu
ˇ
c and Rodi
ˇ
c, 2015) consider the mini-
mization of travel distance between machines in the
facility, which is very similar to the minimization of
the connectivity between devices of the placement.
This paper has the following contributions:
1. ILP formulation of the placement problem. Our
model considers all possible variants (pairs of
width and height) of topological structures enu-
merated by the packing algorithm. The model of-
fers features for the successful placement of BCD
technology ICs, which was required by the indus-
try partner due to its lack of automation.
2. Method based on force-directed graph draw-
ing (FDGD) for finding partial initial solution
used as a warm start, which significantly improves
the performance of the utilized Gurobi (Gurobi
Optimization, LLC, 2021) solver. Thus, we do not
require the hierarchical decomposition (Xu et al.,
2017) to speed up the optimization of the dis-
cussed problem instances.
3. Comparison of our approach with open-source so-
lution ALIGN (Dhar et al., 2021), and evaluation
on real-life industrial instances, provided and val-
idated by the industry experts.
2 PROBLEM STATEMENT
The problem description is generated from the pro-
vided netlist of the IC, which describes the circuit’s
devices and their interconnections, a list of the topo-
logical structures, and a constraint database. Both sin-
gle devices and topological structures of the netlist
are modeled as rectangles with multiple shape vari-
ants. In the rest of the text, we refer to both the
devices and structures as rectangles. This model-
ing is an extension of the rectangle packing formu-
lation (Berger et al., 2009), a well-known combinato-
rial problem. Let n be the number of rectangles to be
placed. Each rectangle i is associated with its set of m
i
pre-defined variants R
i
= {(w
1
i
,h
1
i
),... ,(w
m
i
i
,h
m
i
i
)},
which includes rotated variants as well. Each pair of
rectangles (i, j) is associated with their minimum al-
lowed distance a
i, j
. Figure 1 is an illustrative exam-
ple that shows the placement with 18 different inde-
pendent rectangles distinguished by color.
Connectivity: between devices, which approximates
the final wire length, is also derived from the netlist.
We translate the net representation of the device in-
terconnectivity to pairs of devices in a P2P manner.
Let G = (V,E) be a hypergraph with a set of vertices
V = {v
1
,. .. ,v
n
} associated with rectangles, and a set
of hyperedges E = {e
1
,. .. ,e
m
} associated with nets.
Note that each hyperedge e corresponds to a list of
its connected rectangles. Then we define connectivity
Automatic Placer for Analog Circuits Using Integer Linear Programming Warm Started by Graph Drawing
107

Figure 1: Example placement for constraint visualization.
pair weight between rectangles i, j by inspecting each
net e:
c
i, j
=
∑
∀e∈E
c
e
i, j
, (1)
where c
e
i, j
is 0 when rectangle i or j is not present
in net e, and a positive integer otherwise. When we
consider the topological structure, consisting of sev-
eral devices prescribed by netlist, the corresponding
weight accumulates partial weights over its internal
devices. Overall P2P connectivity cost is defined, us-
ing the appropriate distance function d, as:
L
C
=
∑
∀i, j
c
i, j
·d(i, j). (2)
When the HPWL metric is considered, we form
the overall connectivity cost as follows:
L
C
=
∑
∀e∈E
c
e
·(max
i∈e
x
c
i
−min
i∈e
x
c
i
+ max
i∈e
y
c
i
−min
i∈e
y
c
i
),
(3)
where c
e
is the overall weight of the net e and x
c
i
, y
c
i
are coordinates of the center of the rectangle i.
The aspect ratio of the design can be constrained
as well. Let W , H be the width and height of the pro-
duced layout. We define aspect ratio constraint using
a pair of aspect ratio bounds l
R
, u
R
, such that:
0 ≤ l
R
≤ AR ≤u
R
≤ 1, (4)
where AR =
min{W,H}
max{W,H}
is the aspect ratio of the design.
We can forbid rectangles to be placed within a spe-
cific subarea of the canvas; we refer to these subareas
as blockage areas. This is shown in Figure 1, where
a blockage area of size 10 000 x 20 000 was placed in
the bottom left corner of the canvas.
Topological Structures: are easily modeled using
multi-variant rectangles - they consist of a set of de-
vices that need to be placed in a compact regular pat-
tern, so the entire IC performs as intended. Given the
list of internal devices of the structure, we need to
generate all feasible variants of the structure for the
final optimization. When a topological structure con-
sists of devices with uniform dimensions, all possible
variants can be enumerated by calculating the number
of required columns for a given number of rows so all
internal devices can fit in a regular tabular pattern. An
advanced approach is needed when the structure’s de-
vices only have the same width, and efficient packing
is required (see Figure 2). In this paper, the struc-
tures contain between 4 and 40 variants. Rectangles
with multiple variants are also shown in Figure 1 (e.g.,
the orange rectangle’s internal configuration uses two
rows, internal devices shown as smaller darker rect-
angles enveloped by the lighter shell).
Furthermore, we model additional empty space,
or pocket, around the placed structures and devices
(shown as a lighter outer shell around packed devices
in Figure 2). Pockets are critical for the successful de-
sign of BCD technology ICs. If two design elements
do not share their BULK terminal net (which supplies
power to the element), they need to be packed so that
their pockets do not intersect and satisfy the minimum
allowed distance. But when elements have the same
BULK net, their pockets can be merged as long as
the rules concerning the proximity between their in-
ternal devices are satisfied. In Figure 1, red and or-
ange rectangles are not compatible for pocket merg-
ing, while the pockets of orange and yellow rectangles
were merged. The dimensions of the rectangles’ vari-
ants are appropriately enlarged to model the pockets.
Lastly, some devices may be required to form the
symmetry g roup with a common axis of symme-
try. Such a group contains pairs of symmetrical de-
vices, or self-symmetrical ones that need to be placed
directly on the axis. This was especially needed
for comparison with the state-of-the-art tool ALIGN
(Dhar et al., 2021). In Figure 1, there is a symmetry
group with the vertical axis of symmetry, containing
two symmetry pairs and two self-symmetric rectan-
gles, shown in the bottom part of the figure.
3 ILP MODELING
3.1 Core of the Model
The core of the proposed ILP model, extended from
(Berger et al., 2009), is shown in equations (5) - (16).
Let I = {1,...,n} be set of rectangles’ indices. Each
rectangle is represented by four continuous variables;
coordinates of its bottom-left corner (x
i
,y
i
) and width
and height (w
i
,h
i
), which has to correspond to one of
the pre-defined variants (w
k
i
,h
k
i
) ∈ R
i
. The choice of
exactly one variant is made using binary variables s
k
i
for each rectangle i and variant k, as shown in equa-
ICORES 2023 - 12th International Conference on Operations Research and Enterprise Systems
108

tions (6), (7). Placement’s width W and height H are
variables constrained to be the upper bounds for the
most distant part of any rectangle from origin (0,0).
Non-overlapping of the devices is ensured by bi-
nary variables r
k
i, j
and inequalities (8) - (12). At least
one of the inequalities, which corresponds to the re-
lationship (left/right/over/under) between rectangles,
must be valid (r
K
i, j
= 1) without the big-M element
(Camm et al., 1990). Parameter a
i, j
defines the mini-
mum allowed distance between rectangles. By setting
the parameter a
i, j
to the negative value, the solver can
place associated rectangles with their pockets merged,
similarly to device layer-aware placements (Xu et al.,
2019a).
x
i
+ w
i
≤W, y
i
+ h
i
≤ H ∀i ∈ I
(5)
m
i
∑
k=1
s
k
i
= 1 ∀i ∈ I
(6)
w
i
=
m
i
∑
k=1
w
k
i
·s
k
i
, h
i
=
m
i
∑
k=1
h
k
i
·s
k
i
∀i ∈ I
(7)
4
∑
k=1
r
k
i, j
≥ 1 ∀i, j ∈ I : i < j
(8)
x
i
+ w
i
+ a
i, j
≤ x
j
+ M(1 −r
1
i, j
) ∀i, j ∈ I : i < j
(9)
y
i
+ h
i
+ a
i, j
≤ y
j
+ M(1 −r
2
i, j
) ∀i, j ∈ I : i < j
(10)
x
j
+ w
j
+ a
i, j
≤ x
i
+ M(1 −r
3
i, j
) ∀i, j ∈ I : i < j
(11)
y
j
+ h
j
+ a
i, j
≤ y
i
+ M(1 −r
4
i, j
) ∀i, j ∈I : i < j
(12)
x
i
,y
i
,w
i
,h
i
≥ 0 ∀i ∈ I
(13)
W, H ≥ 0 (14)
s
k
i
∈ {0,1} ∀i ∈ I ∀k ≤ m
i
(15)
r
k
i, j
∈ {0,1} ∀i, j ∈ I : i < j
∀k ∈{1,2, 3,4}
(16)
A good estimate of M has a significant effect on
the efficiency of the computation. We set M to a value
that would satisfy even the most extreme placement -
when all rectangles, using their widest variant, would
be placed next to each other in a single row with a
gap equal to the largest minimum allowed distance.
However, if we would impose upper bounds on W and
H (e.g., based on the user’s input), we could easily
scale down the value of M as well.
3.2 Blockage Areas
Blockage areas enable us to restrict specific rectangles
from a subsection of the canvas. This requirement is
handled by introducing the dummy rectangles. Since
each blockage area is defined with fixed bottom-left
corner coordinates x
b
,y
b
and dimensions w
b
,h
b
, rel-
ative position constraints need to be added for each
blockage area. Let b be the label of the blockage area,
and S
b
be a set of indices of rectangles restricted by
blockage area b.
Model is extended by 4 ·|S
b
| binary variables r
k
b, j
for each blockage area b, as is shown in equations
(17) - (22). In case when the reference point of the
blockage area corresponds to the origin (0,0) or when
it lies on one of the axes, some variables and con-
straints can be omitted to simplify the model.
4
∑
k=1
r
k
b, j
≥ 1 ∀j ∈ S
b
(17)
x
b
+ w
b
≤ x
j
+ M(1 −r
1
b, j
) ∀j ∈ S
b
(18)
y
b
+ h
b
≤ y
j
+ M(1 −r
2
b, j
) ∀j ∈ S
b
(19)
x
j
+ w
j
≤ x
b
+ M(1 −r
3
b, j
) ∀j ∈ S
b
(20)
y
j
+ h
j
≤ y
b
+ M(1 −r
4
b, j
) ∀j ∈ S
b
(21)
r
k
b, j
∈ {0,1} ∀j ∈ S
b
∀k ≤4 (22)
3.3 Aspect Ratio
In order to comply with the aspect ratio requirements
from Section 2 given the parameters of equation (4),
additional constraints are required. Binary variable
r
R
is needed since this formulation of ratio constraint
induces non-convex variable space - when r
R
= 0, we
expect that the inequality u
R
·H ≥W holds.
l
R
·W ≤ H ≤ u
R
·W + M ·(1 −r
R
) (23)
l
R
·H ≤W ≤ u
R
·H + M ·r
R
(24)
r
R
∈ {0; 1} (25)
The second approach uses soft constraint, propa-
gated into the criterion function. Aspect ratio crite-
rion element L
R
is defined using the following pair of
constraints:
L
R
≥W −H (26)
L
R
≥ H −W (27)
Automatic Placer for Analog Circuits Using Integer Linear Programming Warm Started by Graph Drawing
109

Figure 2: Two different variants of the same topological
structure.
Therefore, the expression L
R
is zero whenever
both dimensions of the boundary box are equal, which
is generally more appreciated by designers. Neverthe-
less, we omit this criterion element in the rest of the
paper and experiments.
3.4 Topological Structures
As mentioned in Section 2, when topological struc-
tures consist of devices with uniform dimensions,
all their possible variants can be easily enumerated.
Starting from a configuration with a single row, the
minimum number of columns needed to fit all mem-
ber devices into the structure is calculated, and the ac-
tual size of the structure, including minimum internal
distances, can be determined. Afterward, the number
of rows is increased, and an additional variant is cal-
culated until the number of rows exceeds the number
of devices in the structure.
When devices only share a single dimension, a
more advanced approach needs to be used to effi-
ciently pack the internal devices together. A solution
inspired by the Longest processing time list schedul-
ing (LPT) algorithm (Della Croce and Scatamacchia,
2018) can be utilized. We substitute processing time
with our devices’ non-shared dimension. Even though
the scheduling algorithm is only approximate, high-
quality packing for a given number of rows, which
corresponds to the number of parallel machines in the
scheduling case, can be obtained. All possible vari-
ants are again generated by iterating over all possible
numbers of rows. Examples of two variants (2 and
3 rows, rotated) produced by LPT are shown in Fig-
ure 2.
3.5 Device Connectivity
Due to the use of the ILP, which requires both the con-
straints and criterion function to be linear, Euclidean
(L
2
) norm between rectangles cannot be used as an
appropriate distance in the P2P connectivity metric.
Instead, two alternative approaches for calculating the
distance between pairs of rectangles are shown. Let
d
x
i, j
,d
y
i, j
be the distance between a pair of rectangles
i, j in x and y dimensions, respectively. We can rep-
resent the actual distance between a pair of rectangles
either by the Manhattan (L
1
) norm, defined as:
L
1
(i, j) = d
x
i, j
+ d
y
i, j
, (28)
or Quasi-Euclidean (L
∗
) norm (Devgan et al., 2019),
which more closely matches L
2
norm:
L
∗
(i, j) = max{d
x
i, j
,d
y
i, j
}+ (
√
2 −1) ·min{d
x
i, j
,d
y
i, j
}.
(29)
Also, distance can be calculated between the two
closest points of the pair of rectangles or between
their centroids. To model these phenomena, the fol-
lowing inequalities are used for the x dimension. The
equations are identical for the y dimension. We define
x-offset x
off
i, j
as 0, if centroid distance is considered and
as (w
i
+ w
j
)/2 otherwise. Then inequalities:
d
x
i, j
≥ x
i
+
w
i
2
−x
j
−
w
j
2
−x
off
i, j
, (30)
d
x
i, j
≥ x
j
+
w
j
2
−x
i
−
w
i
2
−x
off
i, j
, (31)
d
x
i, j
≥ 0, (32)
define dimension elements of the distance between
rectangle pair i, j. In order to combine these elements
into the final accumulated criterion expression, let C
be a set of pairs of rectangles corresponding to non-
zero connectivity weight.
C = {(i, j) | i < j, c
i, j
> 0} (33)
Constant t is set to 1, if L
1
norm is used, and to
(
√
2−1) in case of L
∗
. The following inequalities and
final equality are sufficient to define the total weighted
P2P connectivity cost expression L
P2P
C
. Thanks to the
minimization of the final criterion function, there is
no need for additional binary variables.
d
i, j
≥ d
x
i, j
+t ·d
y
i, j
(34)
d
i, j
≥ d
y
i, j
+t ·d
x
i, j
(35)
L
P2P
C
=
∑
∀(i, j)∈C
c
i, j
·d
i, j
(36)
We formulate the overall HPWL connectivity us-
ing the same distance elements d
x
i, j
, d
y
i, j
, but instead of
summation, the maximum distance between pair of
rectangles in the given net would be determined us-
ing continuous variables d
x
e
, d
y
e
for each net e. Then,
L
HPWL
C
is defined as a weighted sum of each net’s cost
element.
d
x
e
≥d
x
i, j
∀i, j ∈ e (37)
d
y
e
≥d
y
i, j
∀i, j ∈ e (38)
L
HPWL
C
=
∑
∀e∈E
c
e
·(d
x
e
+ d
y
e
). (39)
ICORES 2023 - 12th International Conference on Operations Research and Enterprise Systems
110

3.6 Symmetry Groups
To successfully model the symmetry groups, we re-
quire the additional continuous variable to represent
the axis of symmetry. Assume that Sym
y
is the
symmetry group with the vertical axis of symmetry,
whose position is determined by the continuous vari-
able x
sym
. The symmetry group consists of indices of
self-symmetric rectangles (s
0
,−) and pairs of indices
associated with symmetric pairs (s
1
,s
2
). Then the
following equations constrain the symmetry group’s
rectangles to share the same axis of symmetry:
w
s
1
= w
s
2
∀(s
1
,s
2
) ∈ Sym
y
(40)
h
s
1
= h
s
2
∀(s
1
,s
2
) ∈ Sym
y
(41)
y
s
1
= y
s
2
∀(s
1
,s
2
) ∈ Sym
y
(42)
x
s
1
+ x
s
2
+ w
s
1
= 2 ·x
sym
∀(s
1
,s
2
) ∈ Sym
y
(43)
2 ·x
s
0
+ w
s
0
= 2 ·x
sym
∀(s
0
,−) ∈Sym
y
(44)
Constraints for a group with the horizontal axis of
symmetry would be constructed analogously.
3.7 Criterion
In order to minimize the area of the placement, which
is a nonlinear expression W ·H, we approximate it us-
ing the half perimeter of the resulting placement:
L
A
= W + H. (45)
We expect that thanks to the correlation between
half perimeter and the area of the bounding rectan-
gle, a solution minimizing L
A
will have a small area
as well. This correlation assumption can also be im-
proved by using suitable aspect ratio constraints, forc-
ing the solver to produce square-like designs.
Ultimately, the final criterion function is defined
as:
L = c
A
·L
A
+
c
C
S
·L
C
, (46)
where S is normalization constant and c
A
, c
C
are
weights; by tuning them, we can achieve a suitable
trade-off between both L
A
and L
C
. However, since
there are only two criterion elements, we fix c
A
= 1
and tune only the connectivity weight. We use the
normalization constant S to make the weight c
C
less
sensitive to a number of nets of the instance, which
may vary significantly; therefore, we can re-use the
same value of c
C
and expect a similar outcome in the
sense of connectivity importance. In the case of P2P
connectivity, we define the normalization constant us-
ing each pair of rectangles as:
S
P2P
=
∑
(i, j)∈C
c
i, j
. (47)
In the case of HPWL connectivity, we only com-
bine each net’s weights together:
S
HPWL
=
∑
e∈E
c
e
. (48)
4 FORCE-DIRECTED GRAPH
DRAWING
The computational complexity of the model from
Section 3 is directly connected to the use of binary
variables, specifically relative position variables r
k
i, j
and rectangle variant variables s
k
i
. The number of r
k
i, j
variables grows quadratically with respect to a num-
ber of independent rectangles in the instance; even the
state-of-the-art ILP solvers cannot keep up with such
an increase in the number of decision variables. How-
ever, when a subset of these binary variables is set
to the specific values, leading to a potentially high-
quality initial solution, it will allow the solver to prune
parts of the search space more efficiently.
One way to obtain the partial assignment of val-
ues to relative position variables is by using algo-
rithms originally dedicated to graph drawing, specifi-
cally, FDGD algorithms (Fruchterman and Reingold,
1991). The so-called spring embedding algorithms
distribute the graph vertices so that highly connected
vertices are close to each other while minimizing
overlaps. In (Kandu
ˇ
c and Rodi
ˇ
c, 2015), the author
uses the FDGD for the factory floor layout problem.
This problem concerns the placement of machines on
the factory floor to minimize the travel distances be-
tween the machines and the total area as well. Thanks
to the similarity with our placement problem, we uti-
lized the proposed solution. Note that other force-
directed approaches were proposed to solve place-
ment in the past (Spindler et al., 2008).
Only the best aspect ratio-wise variant is selected
per rectangle. With a probability of 0.5, each rectan-
gle is introduced in a rotated variant. This selection
of variants is fixed before the main phase of the algo-
rithm. Then, rectangles are randomly distributed on
the canvas, defined by their centroids p
i
. The box, in-
side which the rectangles are distributed and outside
of which the boundary forces apply, was defined as a
square with an area 125 % larger than the total area of
rectangles and blockage areas.
The paper’s (Kandu
ˇ
c and Rodi
ˇ
c, 2015) main con-
tributions used in our heuristic are definitions of at-
tractive and repulsive forces. G
i, j
refers to an attrac-
tive force element applied to the rectangle i due to the
rectangle j. Similarly, F
i, j
refers to the repulsive force
element. Boundary repulsive force B
i
pushes the rect-
angles back into the initial bounding box. Lastly, to
Automatic Placer for Analog Circuits Using Integer Linear Programming Warm Started by Graph Drawing
111

initialize centroids of rectangles
fix symmetry groups
i ← 0
while i < iterations do
for all c ∈rectangle indices do
calculate O
c
and B
c
set F
c
and G
c
to 0
for all j ∈ rectangles ∪blockage areas do
F
c
← F
c
+ F
c, j
end for
for all j ∈ rectangles connected to i do
G
c
← G
c
+ G
c, j
end for
Q
c
← f ·F
c
+ g ·G
c
+ b ·B
c
+ o ·O
c
p
c
← p
c
+ δ ·Q
c
end for
i ← i + 1
end while
return rectangles’ positions
Algorithm 1: FDGD algorithm for warm start heuristic.
explicitly consider our goal of minimizing the area,
the origin force O
i
that attracts each rectangle to the
origin of the coordinate system is introduced.
To accommodate the existence of the symmetry
groups, we employ the level-based placement heuris-
tics (Coffman et al., 1980) to find suitable packing
of the group. We only pack one rectangle from each
symmetry pair (the position of the other is deter-
mined by its partner), and we ensure that the self-
symmetric rectangles’ centers lie on the axis of sym-
metry. The symmetry group is considered a single
structure within the algorithm, the forces affecting the
group’s members are aggregated, and the group is af-
terward moved as a single entity.
The pseudo-code of the used algorithm is shown
in Algorithm 1. All mentioned forces are calculated
for each rectangle (or symmetry group), and the rect-
angle’s position is asynchronously updated. Hyper-
parameters of the algorithm are coefficients of the
forces, f , g, b, o, that control the relative effect of
each applied force. Parameter δ describes the sim-
ulation step; a too-large step will lead to numerical
instability due to the large changes of positions, while
an extremely small step would require too many itera-
tions to reach the local minimum. How the algorithm
redistributes the rectangles is shown in Figure 3.
Several runs can be performed to avoid the depen-
dence on good initial position distribution. After the
run of the Algorithm 1, relative positions for the ILP
model are extracted. For each pair of rectangles, rel-
ative position constraints of Section 3 with proximity
bounds from Section 2 are evaluated. Similarly to the
placement legalization (Lin et al., 2022), the relation
Figure 3: Initial and final distribution of rectangles by
FDGD method. Attractive forces between rectangles are
highlighted.
whose constraint is least violated is selected, and the
corresponding relative position variable r
k
i, j
is set to 1.
We ensure that this assignment of relative position
variables creates no cycles. Together with the fixed
variant variables s
k
i
, these assignments are used as a
partial initial solution to warm start the solver.
5 EVALUATION
5.1 Methodology
We utilized the Gurobi ILP solver v9.1.2, using four
threads in each experiment. The project was imple-
mented in Python 3.7 and C. Experiments were per-
formed on an Intel Xeon Silver 4110 2.10 GHz.
5.2 Effect of the FDGD
Eighty synthetic instances containing either 20, 30,
50, or 100 independent rectangles (both single and
multiple variant ones) were randomly generated, with
the character of instances based on real-life designs.
Twenty instances were generated for each problem
size. The subset of instances contained blockage ar-
eas, or their aspect ratio was restricted to test the
ability of the solver to handle these constraints. In-
stance set S
1
contained instances with 20 and 30 rect-
angles, and harder sets S
2
and S
3
contained instances
with 50 and 100 independent rectangles, respectively.
Both the stand-alone ILP model and ILP model warm
started by FDGD heuristics (FDGD ILP) were evalu-
ated, with the solver running for up to 600 seconds.
The closest point L
∗
metric was used to model P2P
connectivity. We used values c
C
∈ {0.5,25} to study
how two widely different scenarios with respect to
connectivity importance affect the computation.
As shown in Figure 4, the main advantage of the
proposed warm start heuristic is that the solver finds
a high-quality feasible solution almost immediately.
We can observe this phenomenon in Table 1. FDGD
ILP produced better results (lower criterion value) in
the majority of the 60 studied cases of sets S
1
, S
2
ICORES 2023 - 12th International Conference on Operations Research and Enterprise Systems
112
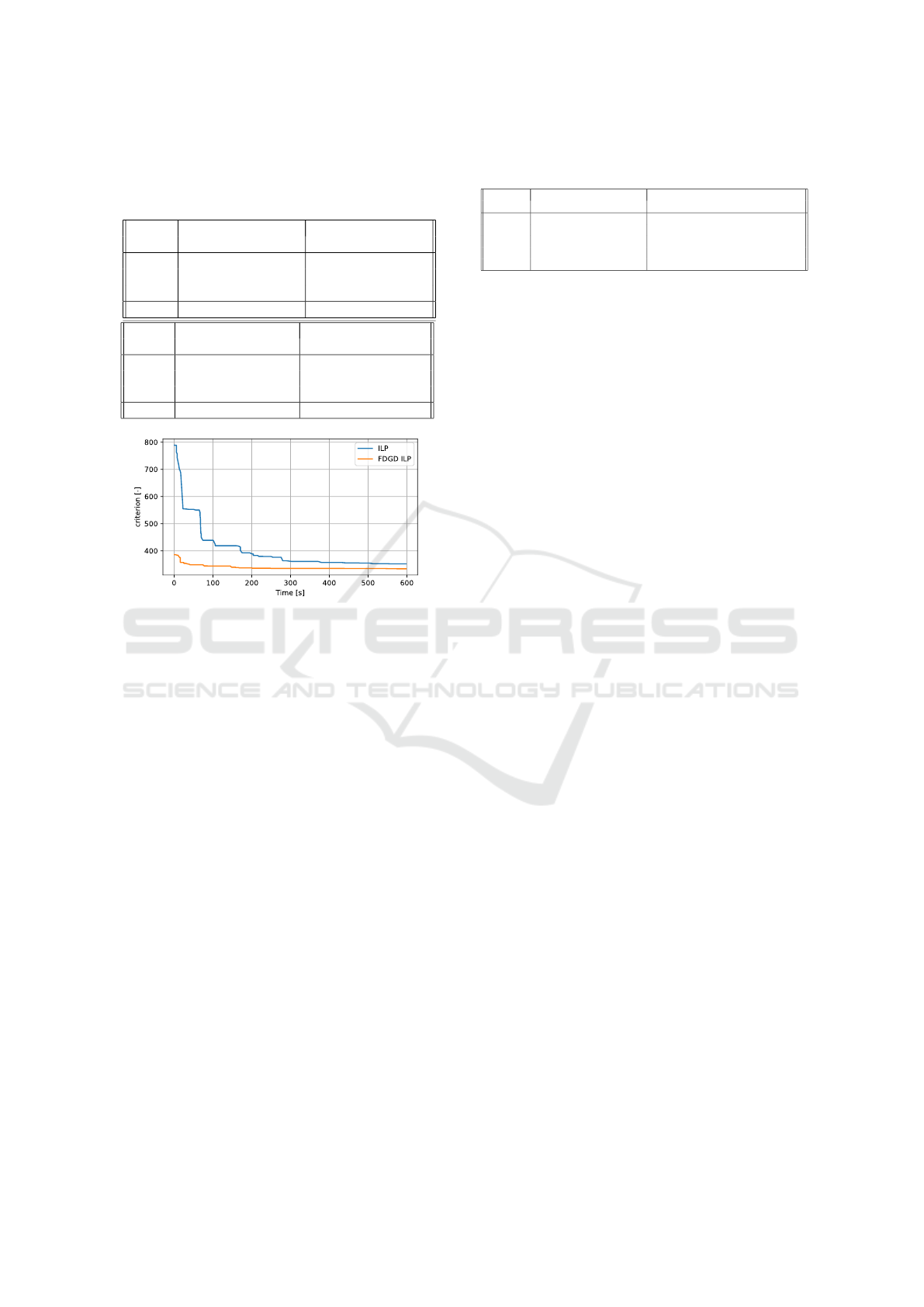
Table 1: Average relative percent gap of method’s criterion
(at given computation time) and best-known result. The
last line shows a number of instances for which the method
achieved a better result than the other one, for sets S
1
, S
2
.
S
1
c
C
= 0.5 c
C
= 25
t [s] ILP FDGD ILP ILP FDGD ILP
30 13.36 3.31 45.58 8.50
120 7.23 1.65 21.86 4.51
600 2.75 0.40 7.97 1.28
n = 40 10 30 9 31
S
2
c
C
= 0.5 c
C
= 25
t [s] ILP FDGD ILP ILP FDGD ILP
30 81.00 8.02 163.21 9.94
120 35.26 2.84 84.40 3.89
600 12.06 0.00 44.00 0.00
n = 20 0 20 0 20
Figure 4: Example of the changes in criterion value during
computation time.
for both studied weights. The performance gap be-
tween FDGD ILP and stand-alone ILP models in-
creases with larger values of c
C
and growing instance
size, which makes the FDGD ILP more suitable for
connectivity-oriented and larger problems. We also
found that stand-alone ILP, on average, needs be-
tween 5x to 15x more computation time to find the
same-quality solution that FDGD ILP finds after 30
seconds, depending on an instance size and value of
c
C
. A further experiment, which included problem in-
stances from the set S
3
with 100 independent rectan-
gles, showed that the stand-alone ILP fails to recover
any feasible solution within its 600 s time limit, while
the FDGD ILP’s warm start solution can be extended
to the complete solution almost immediately; making
comparison for set S
3
unnecessary. Thus, in the rest
of the paper, we only consider FDGD ILP.
5.3 Performance Comparison
To provide an explicit comparison with the state-of-
the-art tools, we used the placer of the open-source
framework ALIGN (Dhar et al., 2021). ALIGN’s an-
notation tool extracted information about grouped el-
ements and symmetries in the design. Test instances
were two Operational Transconductance Amplifiers
Table 2: Comparison of proposed FDGD ILP method with
ALIGN placer (Dhar et al., 2021).
ALIGN placer FDGD ILP
instance area [µm
2
] HPWL [µm] area [µm
2
] HPWL [µm] time [s]
CC-OTA 73.2 132.2 58.3 141.4 6.0
T-OTA 16.9 28.7 18.6 28.5 0.3
DTS-A 52.8 69.4 44.7 90.0 0.5
SCF 1995.6 478.4 1963.4 485.7 13.8
LE 58.2 47.0 56.5 56.2 6.7
(OTA), a Double Tail Sense Amplifier (DTS-A), a
Switched Capacitor Filter (SCF), and a Linear Equal-
izer (LE). A FinFET 14nm Process design kit (PDK),
part of ALIGN’s repository, was also utilized. Results
containing the area and HPWL of the final design both
for ALIGN and our approach FDGD ILP, together
with our solution’s computation time, are shown in
Table 2, with a value of c
C
tuned for each instance.
Even though our solution was tuned to a slightly
different problem formulation (including the defini-
tion of HPWL with respect to topological structures),
and we needed to manually sanitize the data due to
the differences in input data description, making the
comparison mainly illustrative, our solver found solu-
tions whose evaluation metrics were comparable with
ALIGN’s. This further demonstrates the extensibility
and performance of the FDGD ILP. The computation
time of our ILP solver was limited to approximately
match the computation time of methods presented in a
recent paper (Lin et al., 2022), which were evaluated
on similar instances, to document the relatively short
time our method needed to produce a comparable de-
sign.
5.4 Manual Design Comparison
The industry partner STMicroelectronics provided 17
real-life industrial designs. The BCD technology was
applied, and thus our solution’s capabilities were nec-
essary. Provided designs contained both the input
data (netlist, constraints, and structure list) as well as
the data describing the positions of the devices in the
manual placement created by the experts. Provided
instances contained up to 60 independent rectangles.
The manual and automated placements could be com-
pared with their respective values of L
C
and L
A
, and
the placement area. Several runs of the FDGD ILP
were performed, each running for 8 minutes, with
c
C
∈ {0.1,15,50}. We have chosen these values to
find both the placements prioritizing area and con-
nectivity; however, using even larger values eventu-
ally led to placements that would not be applicable
in the industry setting (unsuitable aspect ratio, exces-
sive empty space). Closest-point L
∗
P2P connectivity
metric was used.
Table 3 contains calculated metrics for each prob-
lem instance, with an average ratio of the automated
Automatic Placer for Analog Circuits Using Integer Linear Programming Warm Started by Graph Drawing
113
Table 3: Values of half perimeter L
A
in µm, area in µm
2
and weighted P2P connectivity L
C
in µm and an average ratio of
placer-produced and manual designs’ metrics aR for real-life instances.
manual placer-produced
c
C
= 0.1 c
C
= 15 c
C
= 50
instance L
A
area L
C
L
A
area L
C
L
A
area L
C
L
A
area L
C
1 158 6118 8572 160 6420 4781 163 6583 4585 172 7347 4595
2 116 2710 1829 88 1911 1193 92 2091 968 96 2247 942
3 106 2650 1336 86 1800 1251 88 1898 448 94 2157 388
4 129 4096 555 112 3107 423 115 3289 285 116 3360 283
5 207 8972 36492 159 6305 13196 170 7013 6078 173 7375 5971
6 178 7698 12756 169 7148 9739 186 8172 6017 197 9013 5852
7 168 6580 14646 162 6558 13677 170 7104 9200 169 7105 8766
8 173 7294 2512 160 6435 2052 169 7082 1740 178 7896 1496
9 243 14129 49076 229 13054 22544 269 18056 17849 254 16151 16543
10 205 10214 41730 192 9192 41542 198 9835 25555 203 10325 24107
11 225 9922 4571 197 9356 1629 200 10000 481 200 10000 481
12 155 5953 5277 133 4440 3105 139 4811 2425 142 5025 2379
13 162 6511 6265 151 5676 5512 157 6161 5055 165 6749 5058
14 247 15235 7676 188 8831 6537 209 10905 2940 209 10872 2625
15 123 3758 1772 115 3286 3698 121 3666 2171 133 3936 2150
16 232 12397 14687 218 11817 7687 229 13037 7524 238 13976 7320
17 247 12525 42532 237 13645 30436 241 14369 26509 262 16474 27778
aR 1.00 1.00 1.00 0.89 0.86 0.78 0.94 0.95 0.53 0.97 1.01 0.51
and manual placement’s metrics:
aR =
1
17
·
17
∑
i=1
metric
(i)
method
metric
(i)
manual
, (49)
shown in the last row. On average, we may see that all
three placer settings outperformed the manual results
in both optimized metrics L
A
and L
C
. Even though
area W ·H is not part of the criterion function, we
were still able to find area-wise favorable solutions
in the majority of the cases. Ultimately, for 14 out
of 17 instances, the placer was able to find a solu-
tion outperforming manual design in all metrics dis-
cussed in Table 3. Figure 5 demonstrates the differ-
ences between placer-produced solutions, depending
on the value of c
C
, and includes the distribution of
the devices within topological structures and allowed
pocket merging. Notice the use of differing rectangle
variants in the two designs.
Even though the solver optimized each problem
for up to 480 seconds, we could easily limit the com-
putation time. If the computation was aborted after 60
or 30 seconds, respectively, the found solution would
be worse, on average, by 6 %, or 7 % than the final
result. This relatively small gap is made possible due
to the use of FDGD warm start (see Figure 4).
Industry experts validated produced results and
provided qualitative feedback. Experts positively
commend the relatively short time needed to obtain a
high-quality solution; therefore, a solver can be called
several times with different criteria to obtain a port-
folio of solutions, from which experts can easily se-
lect, while hours of work are needed to create a single
Table 4: Average ratio of placer-produced and manual de-
signs’ area and HPWL for real-life instances, depending on
the type of connectivity metric optimized by the solver.
P2P optimizing HPWL optimizing
c
C
0.1 15 50 0.1 5
L
A
aR 0.89 0.94 0.97 0.88 0.96
area aR 0.86 0.95 1.01 0.83 0.98
HPWL aR 1.08 0.98 0.98 0.92 0.77
placement manually. However, experts pointed out
several suspiciously low values of the P2P connec-
tivity metric of the produced solutions in comparison
with manual designs in Table 3. Thus, we concluded
that the chosen P2P metric does not always capture all
the aspects of the connectivity, and we should focus
on HPWL or minimum spanning tree-based metrics
in the future.
To validate the previous statement, we calculated
the value of HPWL connectivity for each problem in-
stance and each value of c
C
from Table 3. We also per-
formed a brief experiment with ILP solver optimizing
the HPWL connectivity directly (choosing connectiv-
ity weights suitable for this scenario), and we report
the average ratio of placer-produced and manual de-
sign’s L
A
, area and HPWL metrics in Table 4.
We can see that in the case of the solver optimiz-
ing the P2P connectivity, the ratio for HPWL is much
worse than its P2P counterpart reported in Table 3.
However, we could still find HPWL-wise competitive
designs since the solver found an overall better solu-
tion for 8 instances, making P2P formulation applica-
ble even in this indirect scenario. Furthermore, when
ICORES 2023 - 12th International Conference on Operations Research and Enterprise Systems
114

(a) c
C
= 0.1, area = 7790 µm
2
.
(b) c
C
= 50, area = 9229 µm
2
.
Figure 5: Examples of FDGD ILP-produced designs with
different values of c
C
.
the solver optimized the HPWL connectivity directly,
we were again able to find the solution of overall bet-
ter quality (dominating manual designs in 12 cases),
with an average ratio of HPWL metric equal to 0.92
and 0.77, respectively.
6 CONCLUSION
In this paper, we present the ILP formulation of the
placement process of the physical design of AMS ICs.
We successfully formalized the required constraints
in cooperation with our industry partner STMicro-
electronics to support the BCD technology. We also
provided an FDGD-based warm start heuristic, which
significantly improved the performance of the ILP
solver. Ultimately, we evaluated our solution on both
synthetically generated and real-life industrial prob-
lem instances, and we compared our solution with the
open-source ALIGN framework. Both quantitative
results and experts’ feedback regarding the industrial
problem instances showed that our proposed solution
would be beneficial for solving the placement prob-
lem formulated by the industry partner.
Even though our proposed warm start heuristic
significantly improves the performance of the ILP
solver, the problem of scalability persists; a number of
decision variables grow quadratically with an increas-
ing number of independent rectangles to be placed.
Therefore, we currently focus on developing a con-
structive heuristic combined with a genetic algorithm
to tackle the placement problem outlined in this paper,
which would not require a state-of-the-art commercial
solver for competitive results. We believe that this ap-
proach, based on methods developed for strip packing
and facility layout problems, could offer competitive
results with the ability to scale.
ACKNOWLEDGMENTS
This work was supported by the Grant Agency of
the Czech Technical University in Prague, grant
No. SGS22/167/OHK3/3T/13.
This work was partially supported by the
EU ICT-48 2020 project TAILOR no. 952215.
REFERENCES
Alvarez-Valdes, R., Parre
˜
no, F., and Tamarit, J. (2008). Re-
active GRASP for the strip-packing problem. Com-
puters & Operations Research, 35(4):1065–1083.
Berger, M., Schr
¨
oder, M., and K
¨
ufer, K.-H. (2009). A
constraint-based approach for the two-dimensional
rectangular packing problem with orthogonal orien-
tations. In Operations Research Proceedings 2008,
pages 427–432. Springer Berlin Heidelberg.
Camm, J. D., Raturi, A. S., and Tsubakitani, S. (1990). Cut-
ting Big M down to Size. Interfaces, 20(5):61–66.
Chen, T.-C., Jiang, Z.-W., et al. (2008). NTUplace3: An an-
alytical placer for large-scale mixed-size designs with
preplaced blocks and density constraints. IEEE Trans-
actions on Computer-Aided Design of Integrated Cir-
cuits and Systems, 27(7):1228–1240.
Coffman, Jr., E. G., Garey, M. R., et al. (1980). Performance
bounds for level-oriented two-dimensional packing al-
gorithms. SIAM Journal on Computing, 9(4):808–
826.
Cohn, J., Garrod, D., et al. (1991). KOAN/ANAGRAM II:
new tools for device-level analog placement and rout-
Automatic Placer for Analog Circuits Using Integer Linear Programming Warm Started by Graph Drawing
115

ing. IEEE Journal of Solid-State Circuits, 26(3):330–
342.
Della Croce, F. and Scatamacchia, R. (2018). Longest pro-
cessing time rule for identical parallel machines revis-
ited. Journal of Scheduling, 23/2:163–176.
Devgan, V., Singh, V., et al. (2019). Using a novel
image analysis metric to calculate similarity of in-
put image and images generated by WAE. In 2019
Amity International Conference on Artificial Intelli-
gence (AICAI), pages 953–957.
Dhar, T., Kunal, K., et al. (2021). ALIGN: A system for
automating analog layout. IEEE Design and Test of
Computers, 38(2):8–18.
Fruchterman, T. M. J. and Reingold, E. M. (1991). Graph
drawing by force-directed placement. Software: Prac-
tice and Experience, 21(11):1129–1164.
Gurobi Optimization, LLC (2021). Gurobi Optimizer Ref-
erence Manual. https://www.gurobi.com.
Kandu
ˇ
c, T. and Rodi
ˇ
c, B. (2015). Optimisation of factory
floor layout using force-directed graph drawing algo-
rithm. In 2015 38th International Convention on In-
formation and Communication Technology, Electron-
ics and Microelectronics (MIPRO), pages 1087–1092.
Korf, R., Moffitt, M., and Pollack, M. (2010). Optimal
rectangle packing. Annals of Operations Research,
179(1):261–295.
Kubal
´
ık, J., Kadera, P., et al. (2019). Plant layout optimiza-
tion using evolutionary algorithms. In Industrial Ap-
plications of Holonic and Multi-Agent Systems, pages
173–188, Cham. Springer International Publishing.
Lin, Y., Li, Y., et al. (2022). Are analytical techniques
worthwhile for analog IC placement? In Proceedings
of the 2022 Conference & Exhibition on Design, Au-
tomation & Test in Europe, DATE ’22, page 154–159.
European Design and Automation Association.
Lourenco, N., Vianello, M., et al. (2006). LAYGEN - auto-
matic layout generation of analog ICs from hierarchi-
cal template descriptions. In 2006 Ph.D. Research in
Microelectronics and Electronics, pages 213–216.
Ma, Q., Xiao, L., et al. (2011). Simultaneous handling of
symmetry, common centroid, and general placement
constraints. IEEE Transactions on Computer-Aided
Design of Integrated Circuits and Systems, 30(1):85–
95.
Mallappa, U., Pratty, S., and Brown, D. (2022). RLPlace:
Deep RL guided heuristics for detailed placement op-
timization. In Proceedings of the 2022 Conference &
Exhibition on Design, Automation & Test in Europe,
DATE ’22, page 120–123. European Design and Au-
tomation Association.
Martins, R., Lourenc¸o, N., and Horta, N. (2015). Multi-
objective optimization of analog integrated circuit
placement hierarchy in absolute coordinates. Expert
Systems with Applications, 42(23):9137–9151.
Mirhoseini, A., Goldie, A., et al. (2021). A graph place-
ment methodology for fast chip design. Nature,
594(7862):207–212.
Nesterov, Y. (1983). A method for solving the con-
vex programming problem with convergence rate
o(1/k
2
). Proceedings of the USSR Academy of Sci-
ences, 269:543–547.
Oliveira, J. F., J
´
unior, A. N., et al. (2016). A survey on
heuristics for the two-dimensional rectangular strip
packing problem. Pesquisa Operacional, 36:197–226.
Scheible, J. and Lienig, J. (2015). Automation of analog IC
layout: Challenges and solutions. In Proceedings of
the 2015 Symposium on International Symposium on
Physical Design, ISPD ’15, page 33–40.
Spindler, P., Schlichtmann, U., and Johannes, F. M. (2008).
Kraftwerk2—A fast force-directed quadratic place-
ment approach using an accurate net model. IEEE
Transactions on Computer-Aided Design of Integrated
Circuits and Systems, 27(8):1398–1411.
Strasser, M., Eick, M., et al. (2008). Deterministic ana-
log circuit placement using hierarchically bounded
enumeration and enhanced shape functions. In 2008
IEEE/ACM International Conference on Computer-
Aided Design, pages 306–313.
Xie, W. and Sahinidis, N. V. (2008). A branch-and-bound
algorithm for the continuous facility layout problem.
Computers & Chemical Engineering, 32(4):1016–
1028.
Xu, B., Li, S., et al. (2017). Hierarchical and analyti-
cal placement techniques for high-performance ana-
log circuits. In Proceedings of the 2017 ACM on In-
ternational Symposium on Physical Design, ISPD ’17,
page 55–62.
Xu, B., Li, S., et al. (2019a). Device layer-aware analytical
placement for analog circuits. In Proceedings of the
2019 International Symposium on Physical Design,
ISPD ’19, page 19–26.
Xu, B., Zhu, K., et al. (2019b). MAGICAL: Toward
fully automated analog IC layout leveraging human
and machine intelligence: Invited paper. In 2019
IEEE/ACM International Conference on Computer-
Aided Design (ICCAD), pages 1–8.
ICORES 2023 - 12th International Conference on Operations Research and Enterprise Systems
116
