
IncludeVote: Development of an Assistive Technology Based on
Computer Vision and Robotics for Application
in the Brazilian Electoral Context
Felipe Augusto da Silva Mendonc¸a
1 a
, Jo
˜
ao Marcelo Xavier Nat
´
ario Teixeira
2 b
and Marcondes Ricarte da Silva J
´
unior
1 c
1
Informatics Center, Universidade Federal de Pernambuco, Recife, Brazil
2
Electronics and Systems Department, Universidade Federal de Pernambuco, Recife, Brazil
Keywords:
Assistive Technology, Computer Vision, Robotics.
Abstract:
This work presents the development of an assistive technology based on computer vision and robotics, which
allows users with disabilities to carry out the complete voting process without the need for assistance. The
developed system consists of a HeadMouse associated with an auxiliary robotic arm tool that contains an
adapted interactive interface equivalent to the interface of the electronic voting machine. For the development
of the HeadMouse, techniques based on computer vision, face detection and recognition of face points were
used. It is a tool that uses the movements of the face and eyes to perform the function of typing votes through
the adapted interface for the robotic arm to carry out the entire voting process. Tests carried out showed that the
developed system presented satisfactory performance, allowing a user to carry out the entire voting process in
a time of 2 minutes and 28 seconds. It was also possible to conclude that the system has an average throughput
of 1.16 bits/s for movements with the mouse cursor. The developed system should be used by people with
motor disabilities as an assistive technology, to aid in the voting process, promoting social inclusion.
1 INTRODUCTION
Currently, robotics presents a great growth and the
study regarding the ways in which humans interact
with robots has become a multidisciplinary field in
the face of the various possible contributions to soci-
ety. In industries, for example, the presence of robots
has a wide application in repetitive and precision ac-
tivities (Fiorio et al., 2014). One can find initiatives
applied to electronics, medicine, ergonomics, domes-
tic use, among others. It can be seen, therefore, that
robots have been designed to be anywhere and per-
form the most varied tasks.
With this, it is possible to affirm that the world we
live in has become highly dependent on computerized
technologies, with the use of robotics having gained
more and more space. The application of these com-
puterized technologies is even in the Brazilian elec-
toral process. Bearing in mind that in the past the
voting process was carried out using paper ballots, in
a
https://orcid.org/0000-0002-4904-9986
b
https://orcid.org/0000-0001-7180-512X
c
https://orcid.org/0000-0003-0359-6113
which the voter would have to fill in the ballot with
the votes and deposit them in a canvas urn, responsi-
ble for storing the votes of voters in each electoral
section. The use of paper ballots in the Brazilian
electoral process began to be replaced by the use of
electronic voting machines, which are responsible for
computing voters votes quickly and safely, from 1996
onwards.
Another growing field of robotics is its use in help-
ing people with disabilities. For example, robots pro-
grammed to detect obstacles can be found, capable
of calculating the distance between the obstacle and a
visually impaired person, alerting them to their prox-
imity. Positive effects are also already found in the
use of robots in the treatment of autistic children.
It can be noted that robotics allied to the develop-
ment of assistive technologies, contributes to people
with disabilities being able to live, learn and work au-
tonomously, through technologies that reduce, elim-
inate or minimize the impact of existing difficulties
(Edyburn, 2015).
The Electoral Justice Accessibility Program has
collaborated in equalizing opportunities for the exer-
cise of citizenship for voters with disabilities or re-
Mendonça, F., Teixeira, J. and Silva Júnior, M.
IncludeVote: Development of an Assistive Technology Based on Computer Vision and Robotics for Application in the Brazilian Electoral Context.
DOI: 10.5220/0011787000003417
In Proceedings of the 18th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2023) - Volume 4: VISAPP, pages
755-765
ISBN: 978-989-758-634-7; ISSN: 2184-4321
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
755

duced mobility. As an example, the program estab-
lishes that electronic voting machines, in addition to
Braille keys, must also be enabled with an audio sys-
tem, providing the Regional Electoral Courts (TRE)
with headphones in special polling stations. The poll
workers are also guided by the Electoral Courts to fa-
cilitate the entire adaptation process, including part-
nerships to encourage the registration of employees
with knowledge of L
´
ıngua Brasileira de Sinais (LI-
BRAS) (TSE, 2020).
Although the adoption of these initiatives are rele-
vant, it is believed that broad and unrestricted access,
with security and autonomy to people with disabilities
or reduced mobility in the electoral process, can still
advance further. In Brazil, according to data from the
IBGE (Brazilian Institute of Geography and Statis-
tics) through the National Health Survey (PNS), in
2019 the percentage of the population aged two years
or more with some type of disability was 8.4%, with
6.5% with motor disabilities, representing about 13.3
million Brazilians who have difficulties not only in
locomotion, but also in accessing entertainment and
communication resources (IBGE, 2019).
According to data from the Superior Electoral
Court (TSE), the number of voters with disabilities
jumped from 1,059,077 in 2018 to 1,281,611 in 2020,
which corresponds to an increase of 21% in the previ-
ous electorate. The TSE highlights that 32.56% of
voters with disabilities have some mobility impair-
ment and another 5.57% have difficulty voting. The
current voting process for people who do not have
arm/hand movement involves allowing a chaperone
who can enter the voting booth and enter the num-
bers into the ballot box. Such an initiative, therefore,
does not guarantee the secrecy of the vote. Another
relevant point to note is that the voter turnout and ab-
stention rate shows that voters with mobility impair-
ments or with some difficulty in voting had 41.74%
and 90.37% abstention respectively. These numbers
show that this portion of the population is significant
and is growing, requiring improvements and facilita-
tors to be created, increasingly contributing to inclu-
sion (TSE, 2022).
Thus, the development and application of an ef-
ficient human-computer interface, for people with
quadriplegia, combined with a system that helps vot-
ers with disabilities to vote without a person help-
ing them, respecting the secrecy of the vote, becomes
increasingly necessary. The present work proposes
a HeadMouse and Auxiliary Arm system, based on
computer vision techniques, such as detection and fa-
cial recognition, in addition to robotics, to provide a
voter with severe motor disability to carry out the en-
tire voting process.
The main contributions of this work are:
• Development of a support system for people with
motor disabilities to vote;
• Validation of the system through different tests.
The tests were carried out with individuals with-
out motor disabilities and focused on validating the
functioning of the tool. Assuming that the tool was
designed for users who only have head movements,
the test subjects were informed that in order to per-
form the tests they had to remain immobile and could
only use their head movements, in order to simulate
the use by a motor impaired person. Test results were
compared to see if the user would be able to vote us-
ing the inclusive tool and without the tool, comparing
both voting times. By using the tool, an individual
without disability, but with the movement restrictions
of a person with motor disability, only with the move-
ment of the head could carry out the voting process
and that during the day of the election, it would be
possible a total of 120 disabled people carry out the
voting process using the tool, considering the time pe-
riod of 8AM to 5PM.
The remainder of this paper is structured as fol-
lows. Section 2 will deal with related work, both on
tools based on computer vision, and the joining of
tools with auxiliary technologies using robotics. In
section 3, the methods used for the development of
the system will be presented, as well as the tests per-
formed with users. In section 4, the results obtained
in the development and in the tests carried out will
be presented. Finally, section 5 will present the final
considerations on the research carried out.
2 RELATED WORK
Robotics is a relatively young field of study compared
to other areas of study, however, it has highly am-
bitious goals, such as making it possible to perform
detailed tasks, such as surgeries, by robots. One of
the main focuses of study in robotics lately revolves
around the creation of machines that can behave and
perform activities like humans. This attempt to cre-
ate intelligent machines leads us to question why our
bodies are designed the way they are. A robotic
arm is a mechanism built by connecting rigid bod-
ies, called links, to each other through joints, so that
relative motion between adjacent links becomes pos-
sible. The action of the joints, normally by electric
motors, makes the robot move and exert forces in de-
sired ways (Lynch and Park, 2017).
A relevant area of study in robotics involves the
application of robots in an inclusive context, as an
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
756

auxiliary tool in assistive technologies, enabling a
person with a disability to overcome some physical
limitations. Studies have shown that people with up-
per limb disabilities experience major limitations in
their activities in terms of participation and perfor-
mance (Frullo et al., 2017).
Computer technologies play an important role in
human life. The effective use of these technologies
by people with disabilities is difficult or unfeasible.
A human-computer interface with an efficient design
for people with disabilities is of great help, and this
can open up, for example, employment opportunities
for these people and a better quality of life. Recently,
different assistive computing technologies have been
proposed for different groups of people with disabil-
ities. One of the techniques that can be used is com-
puter vision-based tracking that uses image process-
ing or sensors that use physiological signals to de-
tect head movements for mouse control. Computer
vision-based solutions generally rely only on a cam-
era, tend to be cheaper than sensor-based techniques
and can obtain all visual information for future appli-
cations.
(Su et al., 2005) in their research present a com-
putational interface based on low-cost computer vi-
sion that allows people with disabilities to use head
movements and facial gestures to manipulate comput-
ers. The proposed tool uses face detection, eye de-
tection and template matching to control the mouse
using the head and eyes. Using an equation of mo-
tion, the authors transform the user’s current position
on the screen into mouse movements. In one of the
experiments performed, ten users were asked to use
the HeadMouse to move the cursor to the positions of
five blocks of 40x40 pixels that were randomly gen-
erated within a window of 1024x768 pixels. Each
user performed the experiment twice. The first us-
ing the headmouse and the second using a standard
mouse. On average, each user took 3.279 and 0.683
seconds to locate a tile using the standard headmouse
and mouse respectively.
(Palleja et al., 2013) propose the implementa-
tion of a headmouse based on the interpretation of
head movements and facial gestures captured with
a camera. The authors propose the combination of
face detection, matching algorithm models and eye
movement to emulate all mouse events. The head-
mouse implementation was compared with a standard
mouse, a touchpad and a joystick. The validation re-
sults show movement performances comparable to a
standard mouse and better than a joystick, as well
as good performances when detecting face gestures
to generate click events: 96% success in the case of
mouth opening and 68% in the voluntary blinking.
Using a deep learning-based approach, (Abiyev
and Arslan, 2020) proposes a human-machine inter-
face for people with disabilities with spinal cord in-
juries. In which, the proposed human-machine inter-
face is an assistance system that uses head movements
to move the mouse and blinks to trigger click events.
The system is composed of two convolutional neural
networks (CNN). The head mouse control is done by
the first CNN and is used for the recognition of the
head profile directions, which can be left, right, up,
down and no action, if the head is stationary. The
second CNN is used for the recognition of eye states,
which can be closed (click) or open (no action). Fi-
nally, the authors performed tests with the tool and
reached a value of 99.76% accuracy for head move-
ments and 97.42% for eye movements.
The authors (Sampaio et al., 2018) and (Kamak-
shaiah et al., 2022) work with approaches that use a
cascade of regressors to detect face points, such as the
Dlib library (King, 2009). (Sampaio et al., 2018) in
his work develops a tool that combines face detection
and detection of face points for mouse movement and
keyboard use. The author uses a training base pro-
vided by the OpenCV library (Bradski, 2000) for face
detection. The face detection algorithm results in the
rectangular regions of the faces found. For the detec-
tion of points of interest on the face, the author uses
the Dlib library. From the points of interest of the
face, it is possible to move the mouse to where the
user wants in addition to clicking and activating keys.
The author carried out tests of efficiency of move-
ment and of writing and typing to validate the devel-
oped system. The mouse cursor movement efficiency
test showed that the system allows users to move the
cursor and perform mouse clicks smoothly and ac-
curately with throughput of 1.20 bits/sec. The writ-
ing and typing tests with face, eye and mouth move-
ments proved to be possible to perform 1.15 move-
ments with the face per second.
Similarly, (Kamakshaiah et al., 2022) features a
headmouse based on mouth tracking. Mouth position
gap information between the front frame and the next
frame in head motion video frames is used to con-
firm whether a mouth tracking is motion information
or command information. The system consists of fa-
cial detection using the Dlib library combined with
the calculation of the Mouth-Aspect-Ratio (MAR),
in which it is verified whether the mouth is open or
closed. MAR is used to trigger mouse movement or
mouse click events.
Assistive tools can be used to compensate for
these physical limitations. Examples of these struc-
tures are robotic arms, which are devices that can be
mounted on a user’s wheelchair or workstation, which
IncludeVote: Development of an Assistive Technology Based on Computer Vision and Robotics for Application in the Brazilian Electoral
Context
757

are controlled through a joystick or some adaptable
interface that can grab and carry objects. The pur-
pose of these devices is to increase autonomy using
robotics (Lebrasseur et al., 2019) propose the use of
a robotic arm as an assistive tool to perform some ba-
sic actions such as drinking a drink and came to the
conclusion that the use of robotic arms as an assistive
technology led to a significant decrease of up to 72%
task completion time.
In the same vein, (Higa et al., 2014) presents a
computer vision-based assisted robotic arm for peo-
ple with disabilities. The experiment carried out by
the authors consists of taking a bottle of water in a
pre-defined space through the robotic arm. Regard-
ing the results found, position errors of the order of
a few millimeters were observed in the experiment.
The experimental results of the drinking water task
with physically fit individuals showed that they could
perform the tasks without any problems. (Gao et al.,
2015) propose a computer vision-based user interface
for a mobile robotic arm for people with severe dis-
abilities. The system allows a robotic arm to feed a
severely disabled person according to the user’s plate
preference. When selecting the dish using eye move-
ments, the position coordinates are transmitted to the
robotic arm, and this starts a feeding program which
the robotic arm finisher extends the food at the se-
lected dish location, picks up some with the utensil
and takes it to the user’s home mouth. The results
found demonstrate that the algorithms can produce
significant improvements in the performance of ac-
tivities of daily living.
For the development of the headMouse, an ap-
proach similar to that of (Sampaio et al., 2018) was
used, in which the tool is based on the detection of fa-
cial points, aiming to transform head movements into
mouse movements through an interpolation and an
equation of motion smoothing that will be described
in the methodology section.
3 METHODOLOGY
The first stage of the research, called HeadMouse Ar-
chitecture and Development, was dedicated to the de-
velopment of the natural computational interface tool
that will allow voters to vote with little assistance, in
addition to providing total vote secrecy. The second
stage includes the architecture of the auxiliary system,
which was dedicated to the development of the system
that will receive user input, through an adapted inter-
active interface, as well as the development of the en-
tire backend so that the robotic arm can carry out the
voting process. The third stage of the methodology
will be dedicated to carrying out the tests and analyz-
ing the results obtained.
3.1 Headmouse Architecture and
Development
The HeadMouse control system is designed for peo-
ple with physical disabilities who suffer from motor
neuron disease or severe cerebral palsy. The system
calculates the head position and converts it to actual
mouse positions. This system also detects when the
user blinks, and uses this information to control the
main mouse button. The headmouse system includes
the following parts: image acquisition and facial
recognition, blink analysis and conversion to mouse
control signal. The architecture of the proposed sys-
tem is presented in Figure 1. The entire HeadMouse
system was developed in python language due to the
easy integration of the libraries used.
To obtain the input image, the computer’s webcam
will be used with the help of the OpenCV (Bradski,
2000) library. Then, the face recognition step begins.
The developed system uses the Face Mesh module of
the MediaPipe (Lugaresi et al., 2019) library to imple-
ment the detection of facial points. From the detected
facial points, it is possible to obtain the exact position
of the user’s face in the input image. It is also pos-
sible to identify various elements of the user’s face,
such as mouth, nose and eyes, where calculations will
be performed to detect when the user blinks.
The analysis of ocular states is performed by cal-
culating the EAR (Eye Aspect Ratio). (Soukupova
and Cech, 2016) proposed a real-time algorithm to
detect blinks in a video sequence from a standard
camera. The algorithm estimates the position frame.
Equation 1 shows the formula used to obtain the EAR.
The output value is a scalar quantity met by detecting
a face from an image, finding the Euclidean distance
from the corresponding eye coordinates, and plugging
it into Equation 1.
EAR =
∥
p
2
− p
6
∥
+
∥
p
3
− p
5
∥
2 ∗
∥
p
1
− p
4
∥
(1)
To perform the mouse cursor movement functions
and to trigger the mouse click event, the system needs
to interpret the position of the face and its elements in
isolation, in addition to transforming these positions
into functionalities. As already mentioned, the detec-
tion of points on the face allows, from the distance
between these points, to determine the position of the
face and the ocular state.
Movement:
To perform the mouse movement action, we took
advantage of the detection of face points to obtain the
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
758

Figure 1: Headmouse System Architecture.
central point of the eyes. Initially, the landmarks cor-
responding to the right and left iris were highlighted,
creating a circle around the user’s eyes with the help
of OpenCV, making it possible to calculate the cen-
tral point of the eyes from this created circle. After
obtaining the central point of each eye, it was possi-
ble to calculate the midpoint between the two eyes.
To transform the movement of the head into move-
ment of the mouse, a rectangle of predefined size was
placed in the center of the image obtained, which is
640x480 pixels. Then, an interpolation is performed
between the calculated midpoint in relation to the
rectangle placed in the center of the image and the
mouse pointer in relation to the entire device screen.
To move the mouse, the Autopy library was used,
which allows the user to move the mouse to a desired
position just passing the points as a parameter. Thus,
the points obtained with the interpolation were passed
to Autopy’s movement function.
Directly converting the position of the midpoint
between the eyes to the position of the mouse cursor
presented two problems in its implementation. The
first is related to sharp sensitivity, small head move-
ments generate large cursor movements, thus making
it impossible for the user to position the cursor accu-
rately. The second problem is related to the instability
of the cursor positioning, caused by problems in the
variation of the detection of facial points. This prob-
lem exists because even if the user does not perform
any movement, the detection of the face does not al-
ways happen in the same place, since it is an estimate.
To solve the aforementioned problems, it was neces-
sary to implement a smoothing function.
There are several transfer functions used to
smooth out motion and mitigate the effects caused by
detection problems. (Palleja et al., 2013) proposed the
application of a quadratic relationship with the mouse
pointer displacement to provide different sensitivity
when performing large and small pointer displace-
ments. This enhanced control procedure is defined
by computing two intermediate position increments
(xinc, yinc), as seen in Equation 2.
xinc = A ∗ (xm − xpm)
2
∗ sign(xm − xpm)
2
(2)
yinc = A ∗ (ym − ypm)
2
∗ sign(ym − ypm)
2
(3)
In Equation 2 and 3, A is a configuration parame-
ter that defines the speed at which the pointer moves,
which was set to 0.001; xm, ym is the absolute po-
sition of the pointer obtained through the interpola-
tion performed; Xpm and Ypm is the previous posi-
tion of the pointer on the screen; the final position of
the screen pointer Xf and Yf is calculated using Equa-
tion 4 and 5. Then, the mouse pointer is finally placed
at the screen coordinates Xf and Yf.
x f = xinc + xpm (4)
y f = yinc + ypm (5)
Click:
To trigger the click event, the EAR of each eye
was calculated to obtain the average between the re-
sults. If the average between the results is below 0.35,
the click event is triggered. This implementation is
also affected by face detection issues, causing un-
wanted clicks at various times. To try to mitigate this
problem, the condition was set that the event would
only be triggered if the EAR average was below 0.35
in three consecutive frames. To trigger the click event,
the Autopy click function was used.
3.2 Auxiliary System Architecture
The system is composed of an interactive interface,
responsible for inputting data from the HeadMouse
and a back-end responsible for moving the robotic
arm. This back-end is composed of a server that re-
ceives and processes the information sent through the
interface and forwards it to the robotic arm.
3.2.1 Interactive Interface
The interface was developed in flutter and made en-
tirely for desktop. Figure 2 shows the tool’s initial
screen, where some instructions were given to the
user, aiming at an initial introduction to the tool. The
blink button on the interface triggers an alert congrat-
ulating the user for learning and instructing him to
continue with the next steps. Finally, the user should
wait for the polling station’s signal to start voting. Af-
ter voting began, the user had the ballot box keyboard
IncludeVote: Development of an Assistive Technology Based on Computer Vision and Robotics for Application in the Brazilian Electoral
Context
759

displayed on the screen, being able to type in the num-
bers chosen for each candidate, as shown in Figure 2
and Figure 3.
Figure 2: Initial interactive interface.
Figure 3: Adapted Interactive Interface.
3.2.2 Robot Movement
The physical arrangement of the system is pre-defined
and static, all available movement positions are pre-
defined. The robotic arm is positioned on a table next
to the electronic voting machine, as shown in Fig-
ure 4. The arm model used to perform the necessary
movements is the Gen3 Lite, developed by Kinova®.
After voters type in the vote of their choice and press
the confirm button, the data is sent to a backend, pro-
cessed, and sent to the robot so it can carry out the
voting process.
A manual calibration of the position of each of the
keys was performed, using the robotic arm’s python
API, Calibration is performed only once at the begin-
ning of the use of IncludeVote, in order to ensure that
the robot types the vote chosen by the user correctly.
Upon receiving the candidate’s number, the robotic
arm accesses the key positions corresponding to the
requested keys and performs typing. At the end of the
voting process, the robot sends feedback to the inter-
face that frees the screen to type the next vote until
the position of president, after which the voter ends
the voting and is released.
Figure 4: Physical Arrangement.
3.3 User Tests
The test methodology adopted consists of two batter-
ies of tests and a satisfaction survey, the first battery
of test focused on tests carried out with the electronic
voting machine, and the second battery focused on
tests using only the developed HeadMouse, the sec-
ond battery of tests is performed with the aid of an
auxiliary tool called FittsStudy. The tests cover user
performance and usability qualitative aspects. The
two batteries of tests were carried out with 15 peo-
ple, 11 male and 4 female, women between 18 and 39
years old and men between 18 and 59 years old. The
tests were submitted to people without motor disabili-
ties and with daily contact with computers and smart-
phones.
The test protocol defined for tests using Include-
Vote initially consisted of positioning the user in the
center of the computer’s camera, at a distance of 80cm
between the user’s head and the computer screen. It is
worth noting that all 15 subjects underwent all tests.
The test application order was defined this way so
that the user had the least possible interaction with
the HeadMouse and robotic arm set in order to sim-
ulate a real application, where a person with severe
physical disabilities arrives at the polling station and
uses IncludeVote to carry out the voting process.
The system was used equally for all users in all
tests, and the hardware resources made available were
the same. A notebook with a 2.80Ghz Intel Core i7-
1165G7 processor, 16GB RAM memory, 64-bit Win-
dows 11 operating system, with the webcam having a
resolution of 640x480 pixels was used.
3.3.1 Application Tests
The application tests of the IncludeVote tool were car-
ried out using an electronic voting machine. The first
test consisted of the user performing the entire vot-
ing process using the HeadMouse and the auxiliary
system, the second test was performed with the user
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
760
performing the entire standard voting process, with-
out the aid of the robotic arm. The choice of the test
with IncludeVote as the first test was made so that the
user had as little contact as possible with the tool, with
the individual having received only a few instructions
for using the tool, without receiving any training.
Initially, the voter was positioned in the center of
the notebook and exposed to the voting start screen,
shown in section 3.2.1. After that, the user was re-
leased to start the voting process, which would fol-
low the voting flow of the general elections: federal
deputy (Deputado Federal - DF), state deputy (Dep-
utado Estadual - DE), senator (Senador - SE), gov-
ernor (Governador - GV) and president (Presidente -
PR). When voting started, a timer was started to count
the time that the voter took to complete the voting pro-
cess. In addition to counting the total time, the time it
took the user to type the votes for each position was
also taken into consideration. Thus, it was possible to
count the total voting time without robot interactions
with the electronic voting machine in order to make
comparisons with the following tests. The number of
times the user had to type confirm was also counted to
get an idea of how many times the user voted wrongly
or had an involuntary click.
The second test was performed as a way of val-
idating the first, where the voter was exposed to the
standard voting process, having to perform it nor-
mally, typing the keys without the help of IncludeVote
and the robotic arm. This approach becomes interest-
ing for drawing a comparison between voting using
the tool and conventional voting. In this test, the en-
tire process time was accounted for, as well as the typ-
ing times between each position. The number of times
the user had to correct the vote was also computed.
3.3.2 Usability Tests
The mouse cursor movement and main mouse button
activation tests were based on the ISO/TS 9241-411
standard, which deals with evaluation methods for
the development of physical input devices on human-
computer interaction ergonomics. It aimed to evalu-
ate whether the system allows the user to control the
cursor and activate the main mouse click function ef-
ficiently.
The test environment chosen to carry out this stage
of the research was FittsStudy. FittsStudy follows the
protocol defined by the ISO/TS 9241-411 standard
that defines how the evaluation of pointing devices
must be performed, determining how the test environ-
ment must be structured and the calculations that must
be performed.
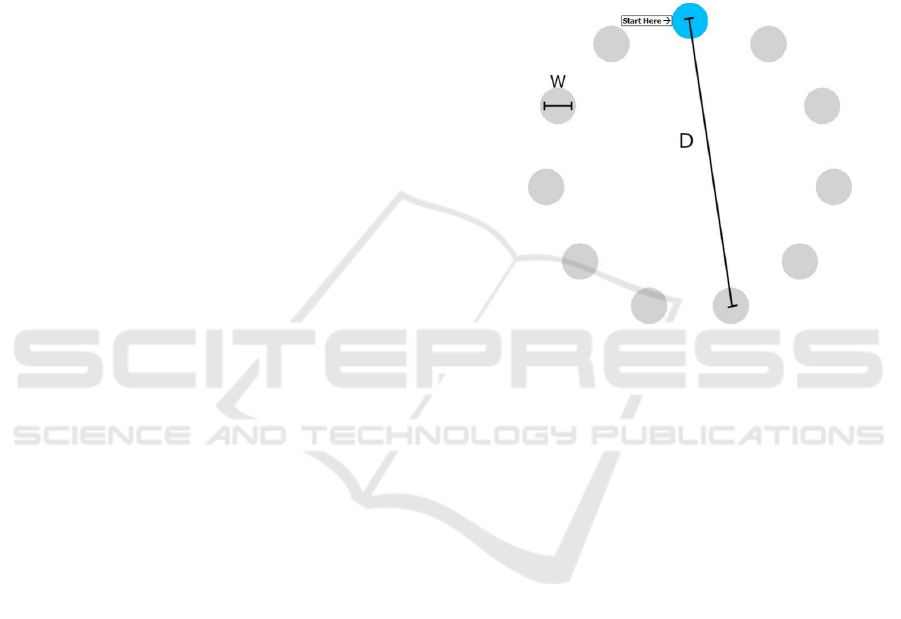
The test environment is composed of circular re-
gions, over which the user must position the mouse
cursor, organized as 11 regions in a circular format.
The evaluation parameters are calculated as a func-
tion of the distance D between the regions and their
size W, as described in Figure 5.
The environment was configured to perform three
sequences of clicks in the circular regions. Thus, two
tests were performed for each individual. In the first
test applied, it was defined that the user would have to
use the HeadMouse tool developed, while the second
test was performed with a standard mouse connected
to the notebook.
Figure 5: Test Environment.
The sequence of circle sizes varied from the
largest to the smallest, varying the level of difficulty,
on purpose, so that when users reached the last se-
quence where the circles were smaller, they had al-
ready overcome the learning barrier.
During the test, the tool collected the time to per-
form the tasks. Through time, the average click time
of the targets (MT) was calculated. By dividing the
calculated average time and the environment diffi-
culty index (ID), it is possible to calculate the per-
formance indicator Throughput (TP), given in bits/s.
This indicator determines how much information the
user was able to enter into the operating system. The
higher the value, the greater the volume of informa-
tion that the user can enter into the operating system.
Through the tool, it was also possible to evaluate the
profile of the click between the click trajectory of one
circle and another, defining it as a hit, an error or an
outlier, which was when the user performed a click
very far from the correct point, many times due to
failure to detect blinks.
3.3.3 Qualitative Assessment
A satisfaction survey was carried out to complement
the other tests, analyzing some qualitative characteris-
tics such as ease of use and comfort. The satisfaction
IncludeVote: Development of an Assistive Technology Based on Computer Vision and Robotics for Application in the Brazilian Electoral
Context
761
survey was conducted with 15 users. The survey had
questions that involved 3 topics of interest, first ques-
tions were asked in order to outline the user’s profile,
then the questions were related to the ease of use of
the tool. Finally, questions related to comfort when
using the tool were asked in order to make it possible
to map the user’s perception of the system.
With the exception of the themes of the questions
related to the user’s profile, which contained more di-
rect questions, the answers should be classified into
5 levels, demonstrating their agreement or disagree-
ment with a given statement. Options ranged from:
1) Strongly Disagree; 2) Disagree; 3) Neither Agree
nor Disagree; 4) Agree; 5) Totally Agree.
4 RESULTS AND DISCUSSION
After applying the two batteries of tests and the sat-
isfaction survey, it was possible to trace the profile of
the user who participated in the survey. The age range
of individuals who participated in the test ranged from
18 to 59 years. A question was asked about the ease of
use of the tool, with 86.7% of the individuals having
fully agreed and 13.3% having partially agreed with
the statement. Individuals were also asked whether
the tool allowed easy selection of buttons and options
on the screen, with 66.7% of individuals fully agree-
ing and 33.3% partially agreeing with the statement.
Finally, individuals were asked about their level of
comfort in using the tool, with 60% of individuals
responding that the tool is very comfortable and the
other 40% responding that the tool was just comfort-
able.
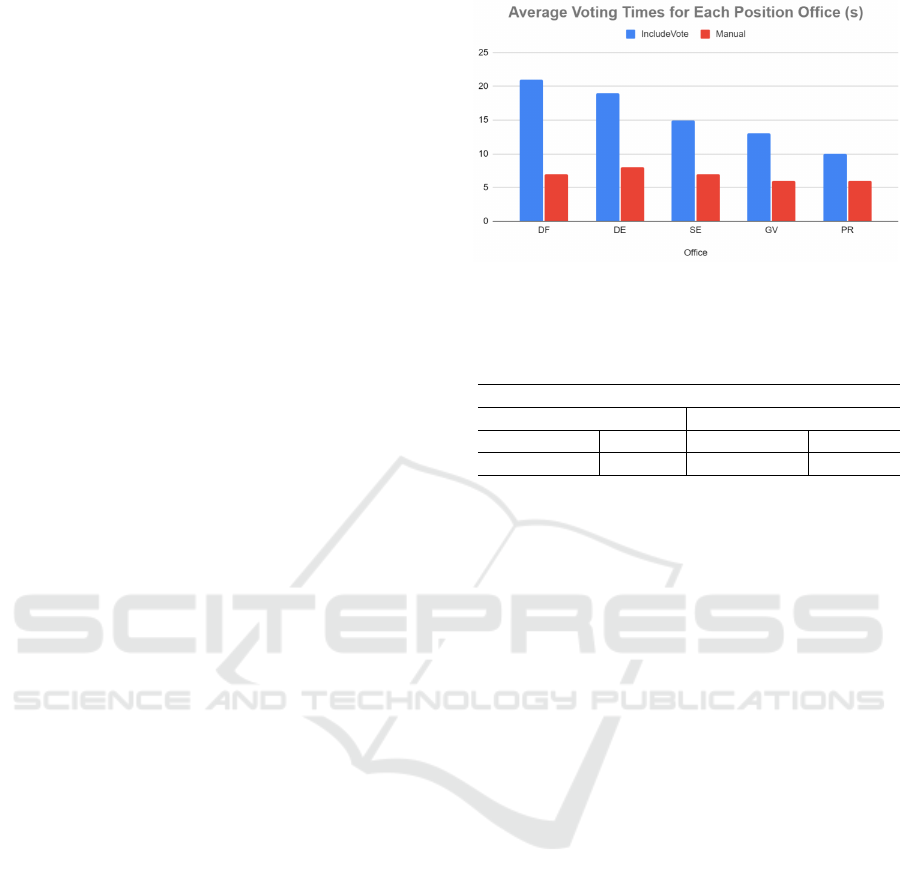
Using the measured time data that is presented in
Figure 6, it presents the average of the typing times
for each position, both for typing using the Head-
Mouse and for typing being done manually by the
user. Thus, it is possible to verify that the proportion
between the typing time using the tool and the typ-
ing times done manually vary between 1.66 and 3.09,
with the Federal Deputy field (4 digits) as the user
takes more time to type being even longer than the
typing time for the position of State Deputy, which
has a greater amount of numbers to be typed (5 dig-
its). This is because the user’s first contact with the
tool occurs here.
Tab 1 presents the general averages of voting
times for both the number typing process and the
complete process. It is possible to verify through Tab
1. that the average of the total time spent in the com-
plete process was approximately 2 minutes and 28
seconds and it is worth noting that half of this time
is allocated to the robot to perform the typing of the
Figure 6: Average Voting Times in Seconds (DF: Federal
Deputy; DE: State Deputy; SE: Senator; GV: Governor; PR:
President).
Table 1: Average Voting Times.
Average Voting Times
Complete Process Manual Typing
IncludeVote Manual IncludeVote Manual
0:02:28 0:00:35 0:01:18 00:00:35
vote. If we take into account that the voter identifi-
cation step takes 1 minute and 30 seconds, it would
be possible for a person with a disability to complete
the entire voting process, including identification, in a
time of 4 minutes. Taking into account that there are
9 hours of voting, and considering another 30 seconds
in the total time, which would be the time for the voter
to enter and leave the session, it would be possible to
provide that approximately 120 voters with disabili-
ties, in each session, carry out the voting process.
In this test, the number of times the user entered
the wrong number and had to press the correct key
was also counted. In all tests, only one subject had
to correct more than once. This shows that the in-
terface developed has a high degree of interactivity
and is well integrated with the HeadMouse tool de-
veloped.
Regarding the tests performed with the FittsStudy
tool, Figure 7 presents a graph of the average through-
puts in each of the test rounds performed by the users.
Figure 8 shows a graph of the average time taken to
perform each circle-to-click task. Finally, Figure 9
presents a comparison between the hit rates of the
tasks for each of the tools used.
Analyzing the graphs in Figure 7 and 8, it is
possible to determine some characteristics of the de-
veloped system. It is possible to verify that the
biggest decrease in task completion time and increase
in throughput occurs during the first round, approxi-
mately 20%, on average. This behavior indicates the
learning speed of the developed system, since the user
needs little time to familiarize herself/himself and use
it effectively.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
762
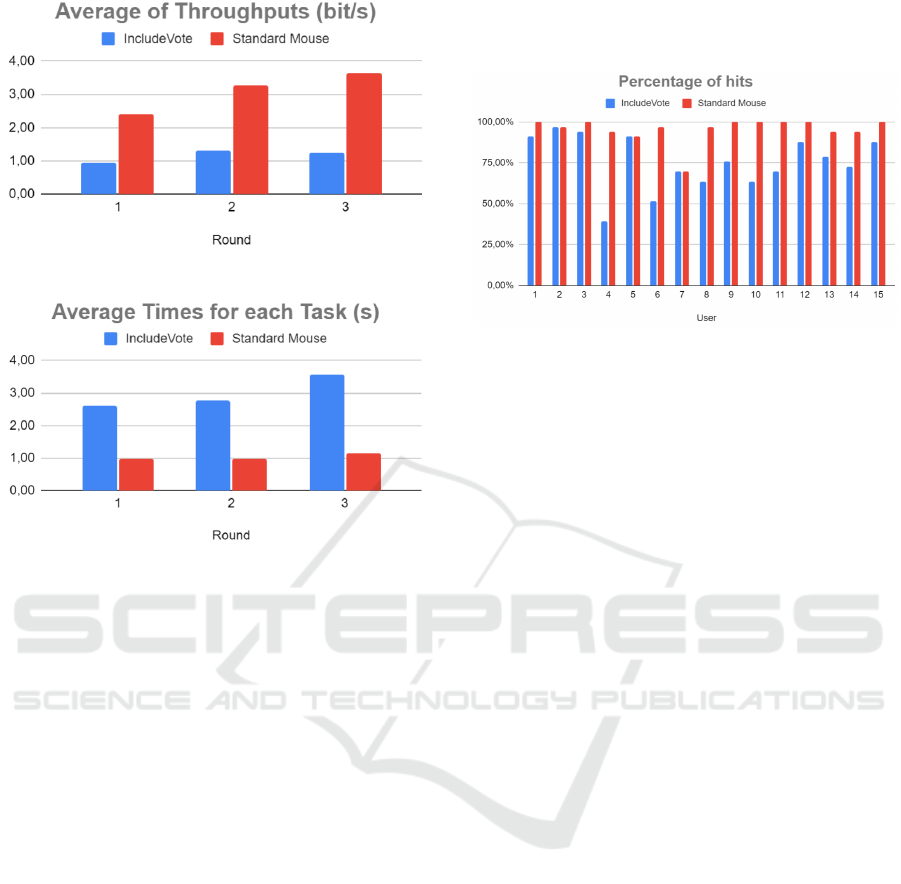
Figure 7: Average of Throughputs for each Task.
Figure 8: Average of Times for each Task.
Regardless of the difficulty of the proposed test
environments, users on average performed the test
with close throughput values ranging between 0.95
and 1.23 bits/s, having a global average of 1.16 bits/s.
In his experiment (Sampaio et al., 2018) performs
movement efficiency tests and writing and typing to
validate the headmouse he developed. The mouse cur-
sor movement efficiency test showed that the system
has a throughput of 1.20 bits/s, a value close to the
one found in this work. This is an indication that
users were able to complete the task with the same
efficiency, regardless of difficulty. Analyzing the in-
dividual throughput values of each participant, it was
possible to verify that there is not such a large varia-
tion in the values between the first and second rounds,
with the values varying, that is, the lowest value was
not always the first, not following a fixed pattern.
The throughput of the third round also had great
variation, but because it was a test where the circles
were much smaller and consequently much further
away from each other, and due to the large loss of
clicks by the user, it is not interesting to make a com-
parison between the three tests. It was identified that
this problem of lost clicks is caused by the fixed value
of the EAR defined above. For people with very small
eyes, the system presented false blink detection and
this also dropped the hit rate of some individuals as a
blink detection error represented an involuntary click
that the tool identified as an error. As can be seen
in the graph presented in Figure 9, the hit rate varied
greatly between the two tools.
Figure 9: Percentage of hits.
Tab 2 presents a compilation of the global aver-
ages obtained in the tests with each tool. As it can
be seen, the global average of the time required to
perform each click task was approximately 1.04 sec-
onds for the standard mouse and 2.99 seconds for In-
cludeVote. (Su et al., 2005) obtained similar results in
his experiment, where each user should move the cur-
sor to the positions of five randomly generated blocks
within the screen, performing the experiment twice
with each user, the first using the headmouse and the
second with the standard mouse, where each user took
3.279 and 0.683 seconds to perform the task using the
Headmouse and the standard mouse respectively. In
Tab 2, it is also possible to verify that the global av-
erage of the IncludeVote hit rate was approximately
75.56%, whereas the test with the standard mouse
showed an overall hit rate of 95.56%.
This click loss problem was not observed in the
tests with the auxiliary system, as the test was not
focused on the performance of the HeadMouse tool,
but on the performance of the auxiliary system as a
whole, having obtained significant values regarding
the voting time and the number of times the user had
to correct the vote. Another interesting parallel be-
tween the two tools can be drawn by analyzing the
time each user takes to perform the tasks. Comparing
the average time to perform the tasks, it was possi-
ble to conclude that when the user is below average in
tests involving the auxiliary system, he is also below
average in usability tests performed with FittsStudy.
5 CONCLUSION
The present work aimed to develop and evaluate the
application of a system that allows a voter with motor
disabilities to carry out the voting process. The inter-
action with the system occurs through a HeadMouse
IncludeVote: Development of an Assistive Technology Based on Computer Vision and Robotics for Application in the Brazilian Electoral
Context
763

Table 2: Global Averages.
Global Averages
Throughputs (bits/s) Times (s/task) Hits (%)
IncludeVote Standard Mouse IncludeVote Standard Mouse IncludeVote Standard Mouse
1.16 3.10 2.99 1.04 75.56% 95.56%
based on computer vision that works by moving the
head and blinking the eyes. Thus, the user, through
an adapted interface, can select the voting preference.
The process of typing in the electronic ballot box
the vote chosen by the user is carried out through a
robotic arm, the robot receives the vote through the
interface and types it in the electronic ballot box. The
tests made it possible to visualize whether the ob-
jectives of the developed system were achieved and
the features presented achieved the expected perfor-
mance.
The validation results obtained with a group of un-
trained individuals and without mobility impairments
showed good performance in the tests performed with
the voting system and in the movement and actuation
tests, being comparable to those of a standard mouse.
The test carried out with the electronic voting ma-
chine showed that the system allows the voting pro-
cess to be carried out in an average time of 2 minutes
and 28 seconds, allowing up to 120 voters with phys-
ical disabilities to carry out the voting process. As for
the proportion of time the user takes to type the num-
bers using the HeadMouse and a standard mouse, it
was 1.66 and 3.09 for the best and worst times, re-
spectively. This ratio represents how many times the
HeadMouse’s typing time is longer than that of the
standard mouse. The cursor movement and mouse
activation tests showed that the system allows users
to move the cursor and perform mouse clicks with a
throughput of 1.16 bits/s with an average time to per-
form tasks being approximately 2.99 with a hit rate
of 75.56%. Thus, it can be considered that it is a fast
learning system. The satisfaction survey showed that
the developed system is easy to use, not being an un-
comfortable experience.
Future works could be developed aiming at im-
provements in the system, considering that the sys-
tem, especially the HeadMouse, also due to the low
resolution used, has some limitations, such as the de-
tection of blinks of some users. Another point of
attention is the rectangle used as reference for mov-
ing the head. Currently, the rectangle is fixed in the
center of the screen, but in the future it would be in-
teresting to generate the rectangle having the user’s
head as reference. Another point of improvement in
the proposed system would be the decrease in the ro-
bustness of the robotic arm used, opting for a robotic
arm with a lower price, thus providing the application
of the system in several electoral sessions throughout
Brazil. In addition to improvements in the applied
techniques, tests with users of reduced mobility could
be carried out, thus making adjustments to the system
based on the needs that would arise and identifying
other open points.
A video demonstration of IncludeVote is available
at link.
ACKNOWLEDGEMENTS
This work has been supported by the research coop-
eration project between Softex (with funding from
the Ministry of Science, Technology and Innova-
tion—Law 8.248) and CIn-UFPE.
REFERENCES
Abiyev, R. H. and Arslan, M. (2020). Head mouse control
system for people with disabilities. Expert Systems,
37(1):e12398.
Bradski, G. (2000). The opencv library. Dr. Dobb’s Jour-
nal: Software Tools for the Professional Programmer,
25(11):120–123.
Edyburn, D. L. (2015). Expanding the use of assistive tech-
nology while mindful of the need to understand effi-
cacy. In Efficacy of assistive technology interventions.
Emerald Group Publishing Limited.
Fiorio, R., Esperandim, R. J., Silva, F. A., Varela, P. J.,
Leite, M. D., and Reinaldo, F. A. F. (2014). Uma
experi
ˆ
encia pr
´
atica da inserc¸
˜
ao da rob
´
otica e seus
benef
´
ıcios como ferramenta educativa em escolas
p
´
ublicas. 25(1):1223.
Frullo, J. M., Elinger, J., Pehlivan, A. U., Fitle, K., Nedley,
K., Francisco, G. E., Sergi, F., and O’Malley, M. K.
(2017). Effects of assist-as-needed upper extremity
robotic therapy after incomplete spinal cord injury:
a parallel-group controlled trial. Frontiers in neuro-
robotics, 11:26.
Gao, F., Higa, H., Uehara, H., and Soken, T. (2015). A
vison-based user interface of a mobile robotic arm for
people with severe disabilities. In 2015 International
Conference on Intelligent Informatics and Biomedical
Sciences (ICIIBMS), pages 172–175. IEEE.
Higa, H., Kurisu, K., and Uehara, H. (2014). A vision-based
assistive robotic arm for people with severe disabili-
ties. Transactions on Machine Learning and Artificial
Intelligence, 2(4):12–23.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
764

IBGE (2019). Pesquisa nacional de sa
´
ude, 2019 -
informac¸
˜
oes sobre as condic¸
˜
oes de sa
´
ude da
populac¸
˜
ao, a vigil
ˆ
ancia de doenc¸as cr
ˆ
onicas n
˜
ao
transmiss
´
ıveis e os fatores de risco a elas associados.
https://www.ibge.gov.br/estatisticas/sociais/saude/
9160-pesquisa-nacional-de-saude.html?=&t=
resultados.
Kamakshaiah, K., Sony, P., and Neeraja, B. (2022). Human
computer interaction based head controlled mouse.
Journal of Positive School Psychology, 6(8):145–152.
King, D. E. (2009). Dlib-ml: A machine learning toolkit.
The Journal of Machine Learning Research, 10:1755–
1758.
Lebrasseur, A., Josiane Lettre, O., OT, P. S. A., et al. (2019).
Assistive robotic arm: Evaluation of the performance
of intelligent algorithms. Assistive Technology.
Lugaresi, C., Tang, J., Nash, H., McClanahan, C., Uboweja,
E., Hays, M., Zhang, F., Chang, C.-L., Yong, M. G.,
Lee, J., et al. (2019). Mediapipe: A framework
for building perception pipelines. arXiv preprint
arXiv:1906.08172.
Lynch, K. M. and Park, F. C. (2017). Modern robotics.
Cambridge University Press.
Palleja, T., Guillamet, A., Tresanchez, M., Teixid
´
o, M., del
Viso, A. F., Rebate, C., and Palac
´
ın, J. (2013). Im-
plementation of a robust absolute virtual head mouse
combining face detection, template matching and op-
tical flow algorithms. Telecommunication Systems,
52(3):1479–1489.
Sampaio, G. S. et al. (2018). Desenvolvimento de uma
interface computacional natural para pessoas com
defici
ˆ
encia motora baseada em vis
˜
ao computacional.
Mackenzie.
Soukupova, T. and Cech, J. (2016). Eye blink detection
using facial landmarks. In 21st computer vision winter
workshop, Rimske Toplice, Slovenia.
Su, M.-C., Su, S.-Y., and Chen, G.-D. (2005). A low-cost
vision-based human-computer interface for people
with severe disabilities. Biomedical Engineering: Ap-
plications, Basis and Communications, 17(06):284–
292.
TSE (2020). Programa de acessibilidade. https://www.tse.
jus.br/eleicoes/processo-eleitoral-brasileiro/votacao/
acessibilidade-nas-eleicoes.
TSE (2022). Estat
´
ısticas eleitorais, pessoas com
defici
ˆ
encia, comparecimento e abstenc¸
˜
ao -
2020. https://dadosabertos.tse.jus.br/dataset/
comparecimento-e-abstencao-2020.
IncludeVote: Development of an Assistive Technology Based on Computer Vision and Robotics for Application in the Brazilian Electoral
Context
765
