
Data-Driven Weather Forecast Using Deep Convolution Neural Network
Priya Sharma
1 a
, Ashish Kumar Patel
1 b
, Pratik Shah
1 c
and Soma Senroy
2 d
1
Department of Computer Science and Technology, India
Indian Intitute of Information Technology, Vadodara, India
2
India Meteorological Department, India
Keywords:
Weather Forecast, U-Net , Time Series, NWP, Climate, CNN, IMD, Diurnal Temperature, ConvLSTM.
Abstract:
Weather forecasting is an important task for the meteorological department as it has a direct impact on the
day-to-day lives of people and the economy of a country. India is a diverse country in terms of geographical
conditions like rivers, terrains, forests, and deserts. For the weather forecasting problem, we have taken the
state of Madhya Pradesh as a case study. The current state of the art for weather forecasting is numerical
weather prediction (NWP), which takes a long time and a lot of computing power to make predictions. In
this paper, we have introduced a data-driven model based on a deep convolutional neural network, i.e., U-Net.
The model takes weather features as input and nowcasts those features. The climate parameters considered
for weather forecasting are 2m-Temperature, mean sea level pressure, surface pressure, wind velocity, model
terrain height, intensity of solar radiation, and relative humidity. The model can predict weather parameters for
the next 6 hours. The results are encouraging and satisfactory, given the acceptable tolerances in prediction.
1 INTRODUCTION
The prediction of climate conditions several hours
ago has become a challenging task in the weather
forecasting field. The agricultural industry is depen-
dent on the wellspring of water and other climatic pa-
rameters. The timing and measurement of tempera-
ture and rainfall rate are critical. This problem has be-
come even more challenging with changing climatic
patterns. So far, the primary method for weather fore-
casts is numerical weather prediction (NWP) (Trebing
et al., 2021). The NWP-based models are mathemati-
cal and physics-based models for predictions. It takes
a long time to solve these complex models and predict
the weather. Instead, we have chosen a data-centric
approach based on deep learning techniques to under-
stand and predict climate parameters. Deep convolu-
tional neural networks can learn high-level represen-
tations of nonlinear patterns from the given historical
data. As the weather data is nonlinear in nature and
follows a very irregular trend, deep CNN has evolved
as a better technique to bring out the spatial relation-
a
https://orcid.org/0000-0003-2824-2493
b
https://orcid.org/0000-0002-0409-736X
c
https://orcid.org/0000-0002-4558-6071
d
https://orcid.org/0000-0002-2583-8163
ship between the various fields of the climate. In this
paper, we have proposed a weather forecasting model
based on a specific CNN architecture called U-Net.
The advantage of the model is that it produces more
accurate forecasts by feeding the model’s predicted
state back in as inputs. So we can use this model for
forecasting.
2 LITERATURE SURVEY
Meteorological departments use NWP (Yamashita
et al., 2018) models to predict the future weather
conditions by solving a complex set of mathemati-
cal equations based on atmospheric motion and evolu-
tion. It needs massive computing power to solve com-
plex mathematical equations (Bauer et al., 2015). Nu-
merous works have been done on weather prediction
using different machine learning techniques (Jakaria
et al., 2020).
The authors in (Weyn et al., 2020) proposed a
data-driven global weather forecasting model based
on a CNN approach. In this approach, volume-
conservative mapping is used to project global data
from latitude-longitude grids onto a cubed sphere.
The authors have predicted Z
500
, τ
700−300
, Z
1000
, and
T
2m
and have claimed that for short- to medium-range
Sharma, P., Patel, A., Shah, P. and Senroy, S.
Data-Driven Weather Forecast Using Deep Convolution Neural Network.
DOI: 10.5220/0011785200003393
In Proceedings of the 15th International Conference on Agents and Artificial Intelligence (ICAART 2023) - Volume 3, pages 853-860
ISBN: 978-989-758-623-1; ISSN: 2184-433X
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
853

forecasting, their model outperforms the dynamical
NWP model and the persistence model.
Recently, a model based on convolutional LSTM
has been proposed (Shi et al., 2015) to address the
precipitation nowcasting problem using a radar echo
dataset. The author claimed that the network learns
spatio-temporal correlations better. It also consis-
tently outperforms fully connected LSTM networks.
The authors in (Sønderby et al., 2020) have pro-
posed MetNet, a deep neural network that predicts
precipitation up to 8 hours into the future and pro-
duces a probabilistic precipitation map. The model
takes satellite data and radar data as inputs. The in-
put has a spatial resolution of 1 km
2
and a temporal
resolution of 2 minutes. The architecture of MetNet
uses axial self-attention to capture the spatial depen-
dencies in the input data and aggregate the global con-
text information. The resulting forecasts of MetNet
outperform the baseline numerical weather prediction
model.
3 PROBLEM STATEMENT
In this paper, we have addressed the problem of mul-
tivariable weather forecasting for the next six time
steps in the future based on given ∆t and current
weather conditions. We have used U-Net, deep CNN
architecture for weather forecasting.
4 DATASET FOR MULTI-FIELD
PREDICTION
The weather data is obtained from the National Cen-
ter for Medium-Range Weather Forecasting website,
which is governed by India Meteorological Depart-
ment (IMD). It is cited in a footnote
1
. The dataset is
collected for the state of Madhya Pradesh from Jan-
uary to December of 1989 through 2018. It has a spa-
tial resolution of 0.12
◦
x 0.12
◦
and a temporal resolu-
tion of 1 hour.
The input fields considered for multi-field pre-
diction are 2m-Temperature, Mean Sea Level Pres-
sure, Surface Pressure, Wind Velocity, Model Terrain
Height, Intensity of Solar Radiation, and Relative Hu-
midity.
1
www.ncmrwf.gov.in
5 TIME SERIES FORECASTING
A time series is a sequence of data points ordered in
time. In the usual machine learning dataset, all the
observations are treated equally for training and pre-
diction. But in a time series dataset, it provides an ad-
ditional source of information in the form of the order
of time, which must be analysed for making accurate
predictions.
Deep convolutional neural networks are capable
of automatically extracting important features from a
given dataset. The same characteristic of deep CNN
can also be used for time series forecasting, where the
network learns the temporal and spatial dependence
between the variables.
6 MODEL DESCRIPTION
The model that we have proposed is based on deep
CNN architecture. The multidimensional state of the
atmosphere at time t is represented as x(t), which is
given as input to the U-Net model and predicts the
multidimensional future state of the atmosphere, y(t +
∆t). Here, ∆t is the difference between the time scale
of the input state and the predicted state. The model’s
main advantage is that we can generate continuous
time series of future states by feeding the predicted
states back into the weather model. Mathematically,
it can be written as,
y(t + k∆t) =
(
f (x(t)) k = 0
f (y(t + (k − 1)∆t)) k ≥ 0,
(1)
J
total
=
T
∑
n=1
||x(t + n∆t) − y(t + n∆t)||
2
(2)
In equation (1), the function f(.) represents the U-
net model and y(t + k∆t) represents the multidimen-
sional state of the atmosphere predicted by the U-Net
model. In order, to enforce the model towards learn-
ing longer-term weather dependencies, we train the
model to minimize error on multiple iterated predic-
tive steps using a multi-time-step loss function.
J
total
in equation (2) represents the total loss ob-
tained after multiple iterated predictive steps. We
chose T = 2 for computational efficiency. That is,
once the U-Net model predicts y(t + k∆ t) as out-
put, it is used as input again to minimise the er-
ror. As the dataset is large, we have created a custom
data generator to process the data for ingestion into
the model. The data generator is defined as a four-
dimensional array. The first dimension represents i/o
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
854
time steps, the second dimension is for weather vari-
ables, the third dimension indicates latitude points,
and the fourth dimension is for longitude points.
The ”i/o time steps” dimension indicates how
many times steps are injected or predicted by the
model simultaneously. For example, let i/o time steps
= 2 and ∆t= 1, and the model is initialised at 1 January
00:00:00 UTC, it will accept input between 1 January
23:00:00 UTC and 1 January 00:00:00 UTC and pre-
dict data for 1 January 01:00:00 UTC and 1 January
02:00:00 UTC.
7 CNN ARCHITECTURE
The weather model is implemented using a special
kind of CNN architecture. i.e. U-net. The U-Net ar-
chitecture is symmetric, and it is an end-to-end fully
convolutional neural network. It mainly consists of
two major components. 1) the contracting part (the
encoder network). It is a combination of convolution
operations and max-pooling layers. It is used for iden-
tifying patterns from input atmospheric data. 2) The
expansive part (the decoder network). It is a combina-
tion of convolution operations and upsampling layers.
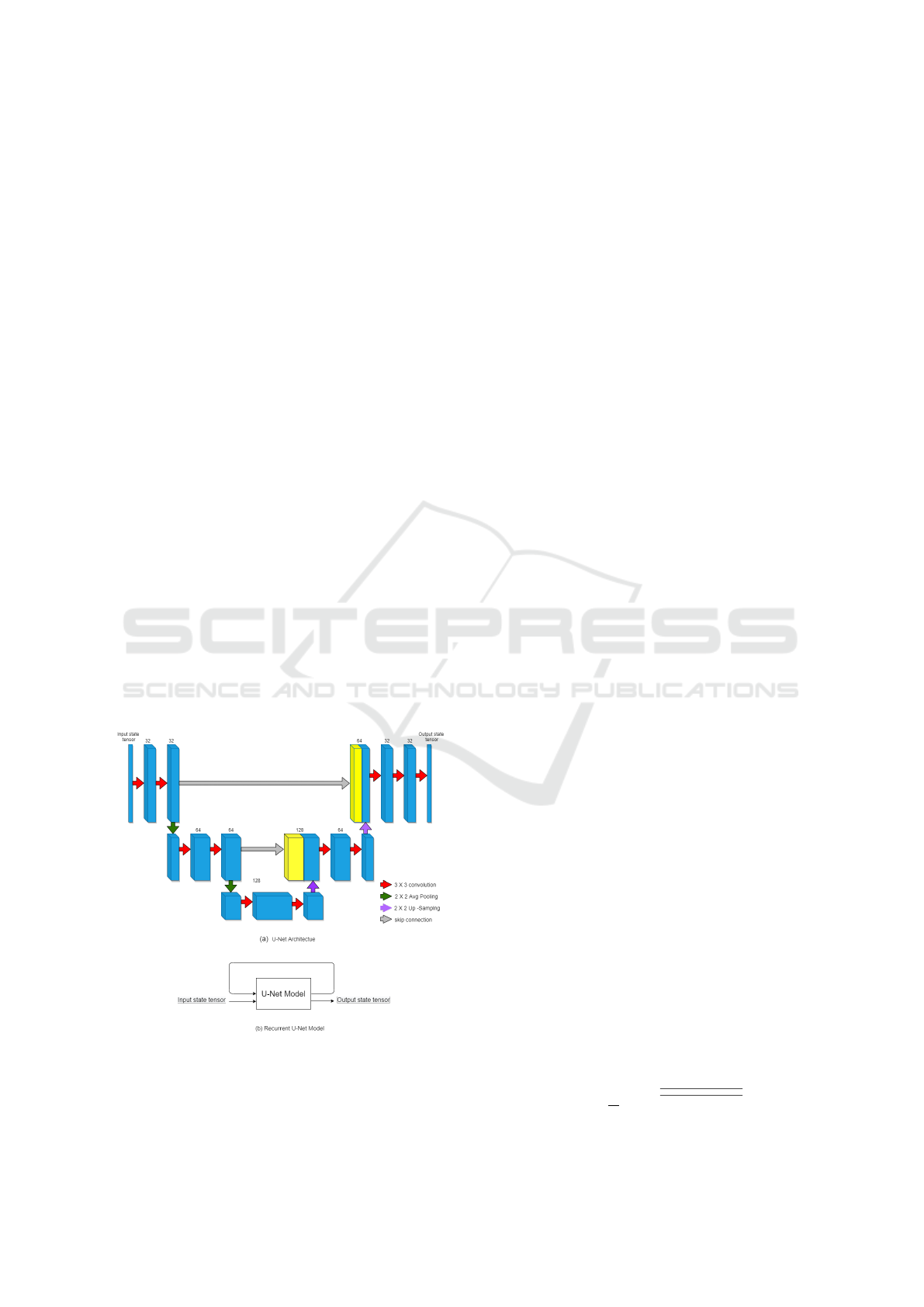
In Figure 1(a), each blue rectangle represents the
atmospheric state. The red arrows indicate a 2D con-
volution operation with relu as the activation func-
tion. The green arrow represents the average pool-
ing operation with stride 2. It is known as a ”down-
sampling operation”. Each purple arrow represents
Figure 1: CNN Architecture for weather model as a se-
quence of operations on layers
an upsampling operation. Due to average pooling
and up-sampling operations, some useful information
might get lost. To overcome this problem, the tensor
state of each convolution operation at the encoding
phase is exactly copied back to the tensor state of its
corresponding upsampling operation in the decoding
phase, as indicated by the grey arrow in Figure 1(a).
In order to enforce the model towards learning to
predict longer-term weather, the output obtained from
the U-Net architecture is again given as input to the
same U-Net, and sequentially, it performs all the op-
erations as shown in Figure 1(b). All the layers and
their corresponding shapes and trainable parameters
are mentioned in Table 1.
8 RECTIFIED LINEAR UNIT
As mentioned earlier, each convolution operation is
followed by a modified Leaky Rectified Linear Unit
(ReLu). For each input x, the leaky relu function is
given as follows:
D
it
=
0.1x x ≤ 0
x 0 ≤ x ≤ 10
10 x ≥ 10,
(3)
The max value of threshold (10) was set empirically.
9 TRAINING
We have trained the U-Net model with two param-
eters. (1) Time Interval (∆t) (2) i/O time steps. ∆t
denotes temporal resolution and i/O time step denotes
number of i/O instances considered for training and
testing. Each weather model is trained for a maxi-
mum of 50 epochs to avoid overfitting. We have intro-
duced an early stopping criterion for the model, which
stops the training if validation loss does not increase
in the last five epochs. To optimise the mean square
error (MSE) loss during the training phase, we have
used the Adam optimizer (Kingma and Ba, 2017) a
variant of the stochastic gradient descent optimization
algorithm, with a default learning rate of 0.001.
10 MODEL EVALUATION
The Forecast error is evaluated using the loss func-
tion RMSE. It computes the root mean square error
between the ground truth forecast vector x(t) and pre-
dicted forecast vector y(t). The RMSE is calculated
as follows:
RMSE =
1
T
T
∑
n=1
q
(x(t) − y(t))
2
(4)
Data-Driven Weather Forecast Using Deep Convolution Neural Network
855
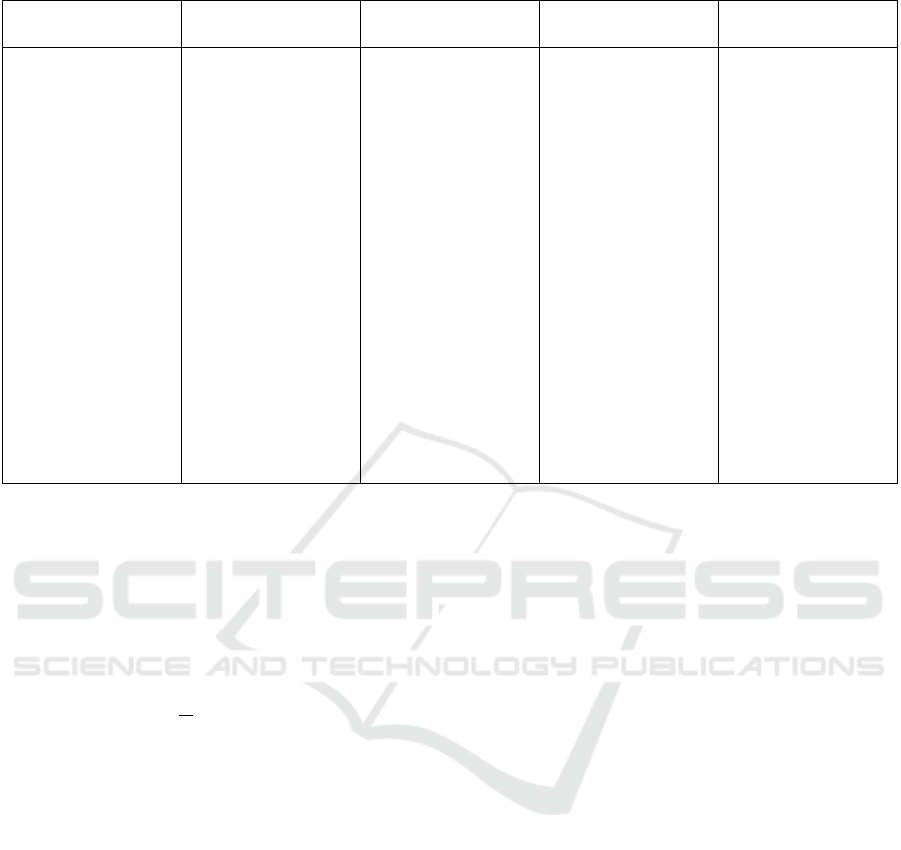
Table 1: CNN Architecture.
Layers Filters Filter size Output shape Trainable parame-
ters
CONV-2D 32 3 × 3 (48, 80, 32) 1184
CONV-2D 32 3 × 3 (48, 80, 32) 9248
Average Pooling-
2D
– 2 x 2 (24, 40, 32)
CONV-2D 64 3 × 3 (24, 40, 64) 18496
CONV-2D 64 3 × 3 (24, 40, 64) 36928
Average Pooling-
2D
– 2 × 2 (12, 20, 64)
CONV-2D 128 3 × 3 (12, 20, 128) 73856
CONV-2D 64 3 × 3 (12, 20, 64) 73792
Upsampling-2D – 2 × 2 (24, 40, 64)
Concatenate – – (24, 40, 128)
CONV-2D 64 3 × 3 (24, 40, 64) 73792
CONV-2D 32 3 × 3 (24, 40, 32) 18464
Upsampling-2D – 2 × 2 (48, 80, 32)
Concatenate – – (48, 80, 64)
CONV-2D 32 3 × 3 (48, 80, 32) 18464
CONV-2D 32 3 × 3 (48, 80, 32) 9248
CONV-2D 4 1 × 1 (48, 80, 4) 132
Here, the overbar indicates the average value over
all the spatial points on the grid. We have used
the Avg(Max) error and the Max(Max) error. The
Avg(Max) is calculated by finding the maximum
value over all the spatial locations and taking the aver-
age for each forecast step. The Avg(Max) error equa-
tion given as follows:
Avg(Max) =
1
T
T
∑
n=1
max
s
|x(t) − y(t)| (5)
max
s
is the maximum value over the spatial grid.
In equations (4) and (5), x(t) is the ground truth fore-
cast vector and y(t) is the predicted vector.
11 EXPERIMENTAL
EVALUATIONS
The dataset for each field is divided into three differ-
ent sets. The training set consists of data from 1989 to
2005. The validation set consists of data from 2006 to
2016. The data from 2017 to 2018 was kept aside for
model testing. For proper use of data in a neural net-
work, the data must be internally consistent and in the
same format and type. We have used the data stan-
dardisation technique, in which every value is sub-
tracted from its mean and divided by its standard de-
viation, to ensure that the dataset becomes consistent.
Implementation details:
The weather model is implemented in Python using
the Keras API of the TensorFlow framework. The
processor is an Intel(R) Xeon(R) Gold 6139. The fol-
lowing paragraphs describe the analysis of results ob-
tained for different fields.
12 RESULTS
12.1 Importance of Solar Radiation
Data in Temperature Prediction
We conducted experiments to determine how solar ra-
diation affects temperature prediction. For that, we
trained two different U-net-based models and pre-
dicted results for the next six hours. The first model
we trained with only temperature data, and for the
second model, we trained with both temperature and
solar radiation data. As shown in Figure 2, when we
trained the model without using solar data and pre-
dicted the results, the RMSE of the prediction was
ranging from 3.2 to 12.3, and the model with solar ra-
diation data was giving a RMSE in the range of 0.9 to
2.3. We can conclude from Figure 2 that solar radia-
tion plays a major role in the prediction of tempera-
ture data.
In meteorology, diurnal temperature variation is
the variation between a high and a low air tempera-
ture that occurs during the same day. In Figure 6.2, we
have plotted the mean and standard deviation graph of
the temperature w.r.t. each hour of the day. It can be
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
856

Figure 2: Plot of Average spatial RMSE for the results without using solar data and with using solar data.
observed from the figure that solar radiation takes care
of the diurnal cycle of the day. Peak daily tempera-
tures occur in the afternoon, and similarly, minimum
daily temperatures occur after midnight.
12.2 Multi Field Prediction Using U-Net
Based Model
We have generated the results for multiple fields
based on two different parameters. i/o time steps
(number of input-output instances considered for
training and testing) and time resolution (temporal
resolution). For each time resolution, we have gen-
erated the results for all the defined i/o time steps.
Given time instances, we have predicted all the input
fields mentioned in the dataset section for the next 6
instances. We predicted the results for ∆t = 1 hour, 2
hour and 3 hour and i/o time steps = 2, 3 and 4.
For example, if i/o time steps = 3 , ∆t= 3, and
the model is initialised at 1 January 00:00:00 UTC
then it will accept input as 1 January 21:00:00 UTC,
1 January 18:00:00 UTC and 1 January 15:00:00 and
will predict data of1 January 03:00:00 UTC, 1 Jan-
uary 06:00:00 UTC and 1 January 09:00:00 UTC.
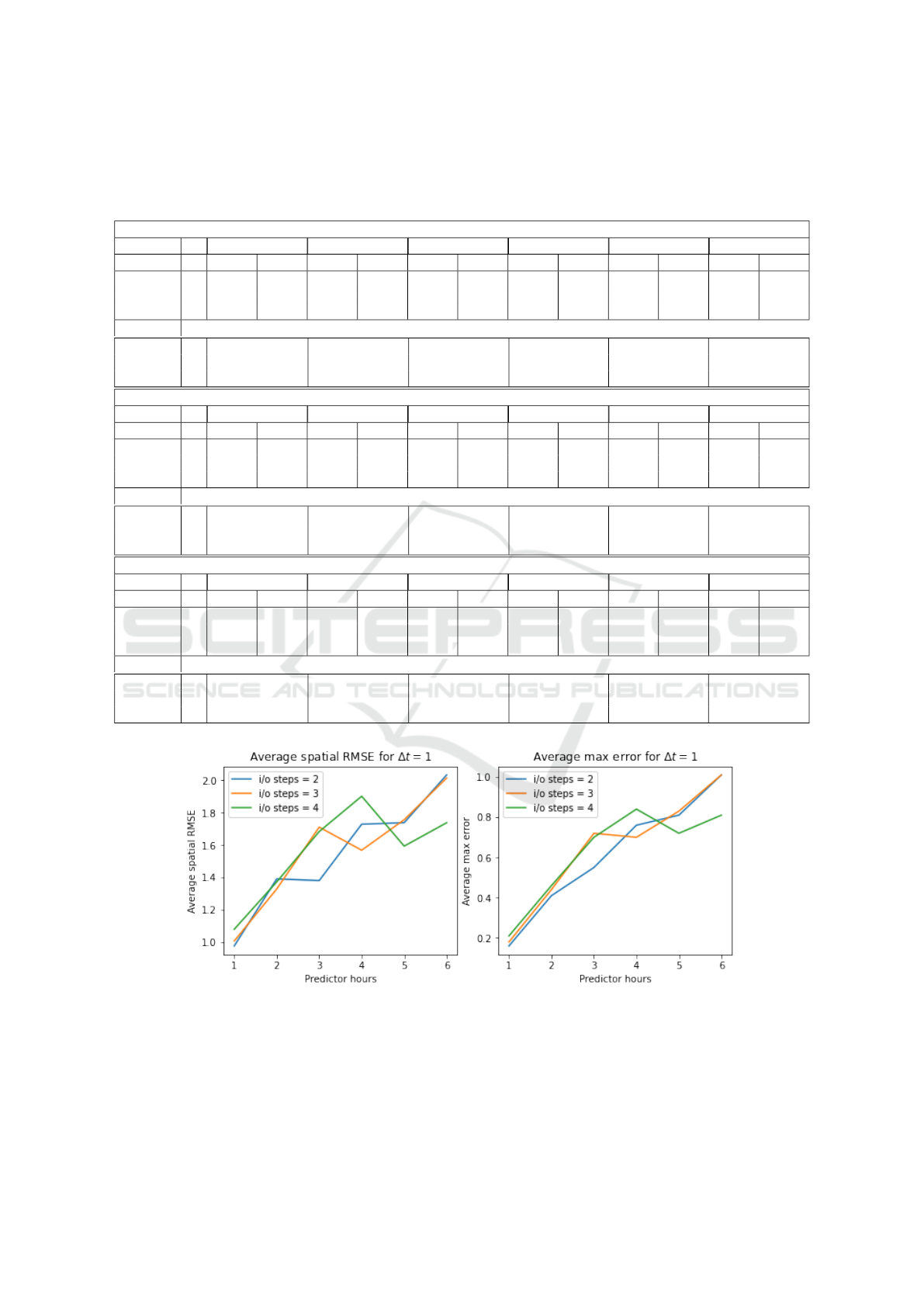
Tables 2 and 3 show the accuracy of the model
based on two evaluation criteria: avg spatial RMSE
and Avg(Max) error for temperature and precipita-
tion, respectively. In each table, FH indicates the
forecast hour. I denotes i/o time steps. A repre-
sents actual avg spatial rmse and N(%) indicates nor-
malised avg spatial RMSE in percentage.
Figures 4 and 5 show the avg spatial RMSE and
Avg(Max) error as a function of forecast lead time up-
to next 6 time instances considering ∆t = 1 hour for
temperature and precipitation respectively. In each
figure, the left-side image indicates the plot of aver-
age spatial RMSE, and the right side image indicates
the plot of Avg(Max) error. The X-axis denotes the
forecast hour, and the Y-axis denotes the error rate for
each forecast hour. Forecast error plots for ∆t = 2 and
∆t = 3 are available in the GitHub repository linked in
the footnote
2
.
We also produced temperature and precipitation
heatmaps for each forecast hour using Deltat = 1 and
i/o time steps = 2, which are accessible at the refer-
ence listed in footnote
2
.
We have trained the ConvLSTM network pro-
posed in (Shi et al., 2015) using the dataset mentioned
in section 4. However, we have skipped a few prepro-
cessing steps while training the network. ConvLSTM
network is giving 1.13 avg. spatial RMSE for precip-
itation data, whereas U-Net is giving 0.41 avg. spatial
RMSE. The model’s output for other weather-related
fields is inaccurate. The models for different weather
fields are therefore not comparable.
13 DISCUSSION
In meteorology, diurnal temperature variation is the
variation between a high and a low air temperature
that occurs during the same day. It is observed dur-
ing experiments that the diurnal cycle of the day com-
pletely depends upon the solar radiations.
The weather data is the time series data. In U-Net
based model the solar radiation data takes care of the
time information of the day.
It is observed that in a U-Net-based model, adding
solar radiation data to the temperature field during
training gives a much better result than training the
model alone with temperature data because the solar
data adds time information in the form of heat en-
ergy. The U-Net-based model performs better than
the NWP model. Global NWP models take around
3-6 hours to calculate physics-based equations. The
U-Net-based model takes around 4-5 minutes for pre-
2
www.github.com/Priya-Sharma07/Data-Driven-
Weather-Forecast-Using-Deep-Learning
Data-Driven Weather Forecast Using Deep Convolution Neural Network
857
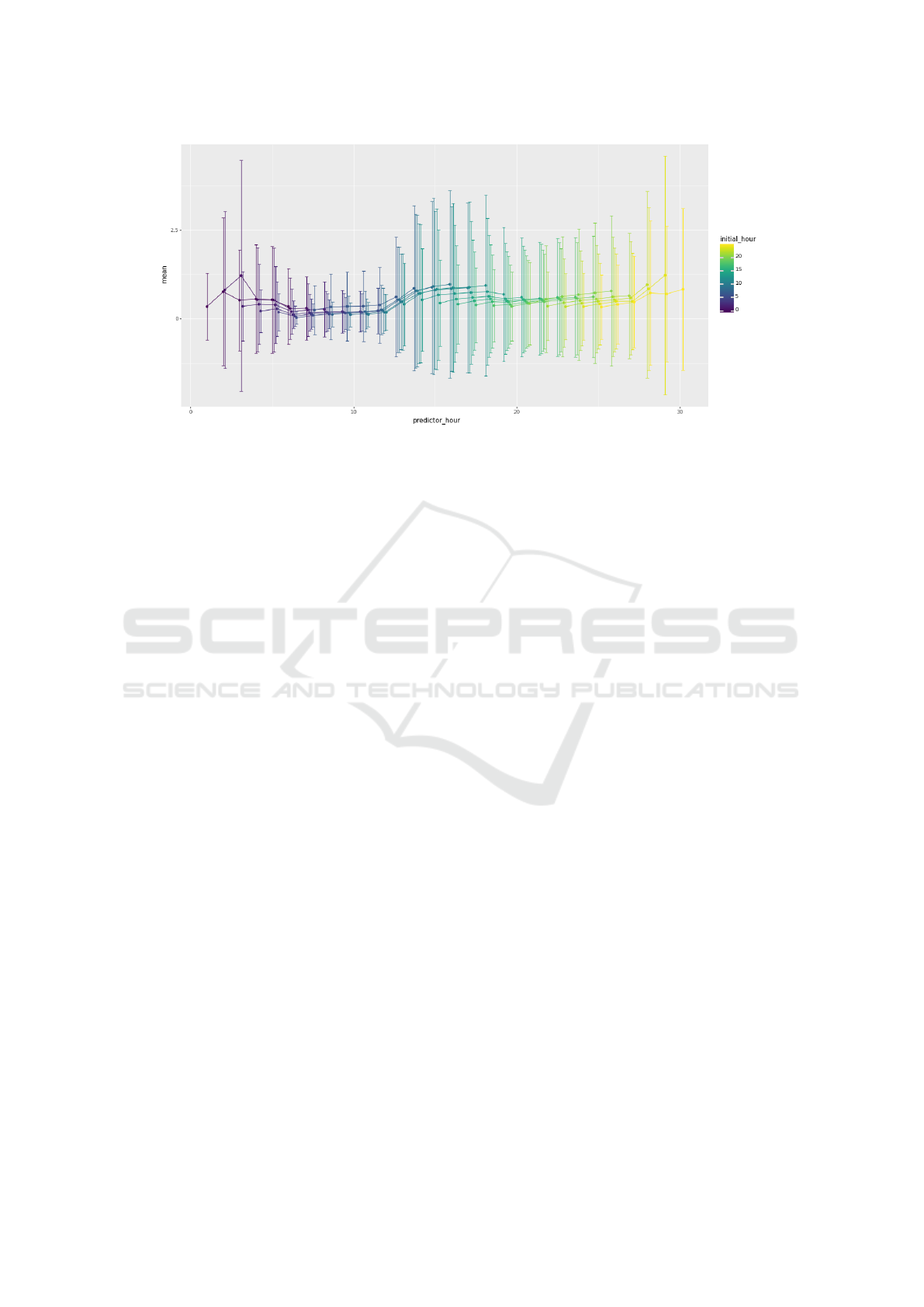
Figure 3: Plot of Average spatial RMSE for the results without using solar data and with using solar data.
diction once the model is trained. In DL-based mod-
els, it is needed to add the training data periodically.
The accuracy of the model can be increased by
increasing the training data.
14 CONCLUSION AND FUTURE
WORK
In this work, we have shown how deep learning meth-
ods can be used for multi-field weather prediction
using available data. We have used the reanalysis
dataset for Madhya Pradesh state.
The diurnal cycle of the day completely depends
on the solar radiation. It adds the time information
to the i/p data in the form of heat energy. Peak daily
temperatures occur in the afternoon, and similarly, the
minimum daily temperature occurs substantially after
midnight. The U-Net model performs better than the
NWP model. It takes less time and resources to pre-
dict weather parameters. The NWP model uses one
forecasting system to predict a full array of weather
parameters. In contrast to this, DL based models can
be used to predict specific weather parameters.
In the future, we would like to improve the accu-
racy of the model by adding an attention mechanism
to the U-Net-based approach, as the mechanism al-
lows the model to focus and place more ”Attention”
on the relevant parts of the input sequence as needed.
We will also implement the preprocessing steps in the
ConvLSTM network and try to adapt the model for
other fields as well. so that we can make appropriate
comparisons among the models.
ACKNOWLEDGEMENTS
We are grateful to India Meteorological Department,
India and Indian Institute of Information Technology
Vadodara for providing the necessary support during
the work carried out.
REFERENCES
Bauer, P., Thorpe, A., and Brunet, G. (2015). The quiet
revolution of numerical weather prediction. Nature,
525:47–55.
Jakaria, A. H. M., Hossain, M. M., and Rahman, M. A.
(2020). Smart weather forecasting using machine
learning:a case study in tennessee.
Kingma, D. P. and Ba, J. (2017). Adam: A method for
stochastic optimization.
Shi, X., Chen, Z., Wang, H., Yeung, D.-Y., kin Wong, W.,
and chun Woo, W. (2015). Convolutional lstm net-
work: A machine learning approach for precipitation
nowcasting.
Sønderby, C. K., Espeholt, L., Heek, J., Dehghani, M.,
Oliver, A., Salimans, T., Hickey, J., Agrawal, S., and
Kalchbrenner, N. (2020). Metnet: A neural weather
model for precipitation forecasting. Submission to
journal.
Trebing, K., Stanczyk, T., and Mehrkanoon, S. (2021).
Smaat-unet: Precipitation nowcasting using a small
attention-unet architecture.
Weyn, J. A., Durran, D. R., and Caruana, R. (2020).
Improving data-driven global weather prediction us-
ing deep convolutional neural networks on a cubed
sphere. Journal of Advances in Modeling Earth Sys-
tems, 12(9).
Yamashita, R., Nishio, M., Do, R., and Togashi, K. (2018).
Convolutional neural networks: an overview and ap-
plication in radiology. Insights into Imaging, 9.
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
858
APENDIX
Table 2: Temperature Error for ∆t = 1, ∆t = 2, ∆t = 3.
∆t = 1
I FH=1 FH=2 FH=3 FH=4 FH=5 FH=6
A N(%) A N(%) A N(%) A N(%) A N(%) A N(%)
Avg Spatial
RMSE
2 0.98 1.8 1.39 2.6 1.38 2.6 1.73 3.3 1.74 3.3 2.03 3.8
3 1.01 1.9 1.33 2.5 1.71 3.2 1.57 3.0 1.76 3.3 2.01 3.8
4 1.08 2.0 1.37 2.6 1.68 3.2 1.9 3.6 1.59 3.0 1.74 3.3
Avg Max
Error
2 0.16 0.41 0.55 0.76 0.81 1.01
3 0.18 0.44 0.72 0.7 0.83 1.01
4 0.21 0.46 0.7 0.84 0.72 0.81
∆t = 2
I FH=2 FH=4 FH=6 FH=8 FH=10 FH=12
A N(%) A N(%) A N(%) A N(%) A N(%) A N(%)
Avg Spatial
RMSE
2 1.65 3.1 3.36 6.3 3.26 6.1 5.11 9.6 4.1 7.7 5.06 9.6
3 1.84 3.5 3.96 7.5 6.1 11.5 4.54 8.6 6.06 11.4 7.85 14.8
4 2.05 1.9 4.54 2.5 6.64 3.2 8.08 3.0 5.3 3.3 6.48 3.8
Avg Max
Error
2 0.5875 1.7683 1.8038 2.9025 2.44 3.0606
3 0.787 2.2353 4.0267 2.8723 4.0257 5.663
4 0.9493 2.6392 4.3846 5.6745 3.5761 4.3093
∆t = 3
I FH=3 FH=6 FH=9 FH=12 FH=15 FH=18
A N(%) A N(%) A N(%) A N(%) A N(%) A N(%)
Avg Spatial
RMSE
2 3.88 7.3 7.49 14.1 6.01 11.3 9.16 17.3 7.11 13.4 9.7 18.3
3 3.91 7.4 7.5 14.2 9.52 18.0 8.02 15.1 9.57 18.1 10.19 19.2
4 4.97 9.4 8.67 16.4 10.13 19.1 9.16 17.3 9.11 17.2 11.81 22.3
Avg Max
Error
2 2.163 5.385 4.242 7.058 5.341 7.571
3 2.176 5.361 7.171 5.755 7.361 8.044
4 3.017 6.28 7.662 7.057 7.126 9.464
Figure 4: Average Spatial RMSE and Avg(Max) Error for Temperature Considering ∆t = 1.
Data-Driven Weather Forecast Using Deep Convolution Neural Network
859
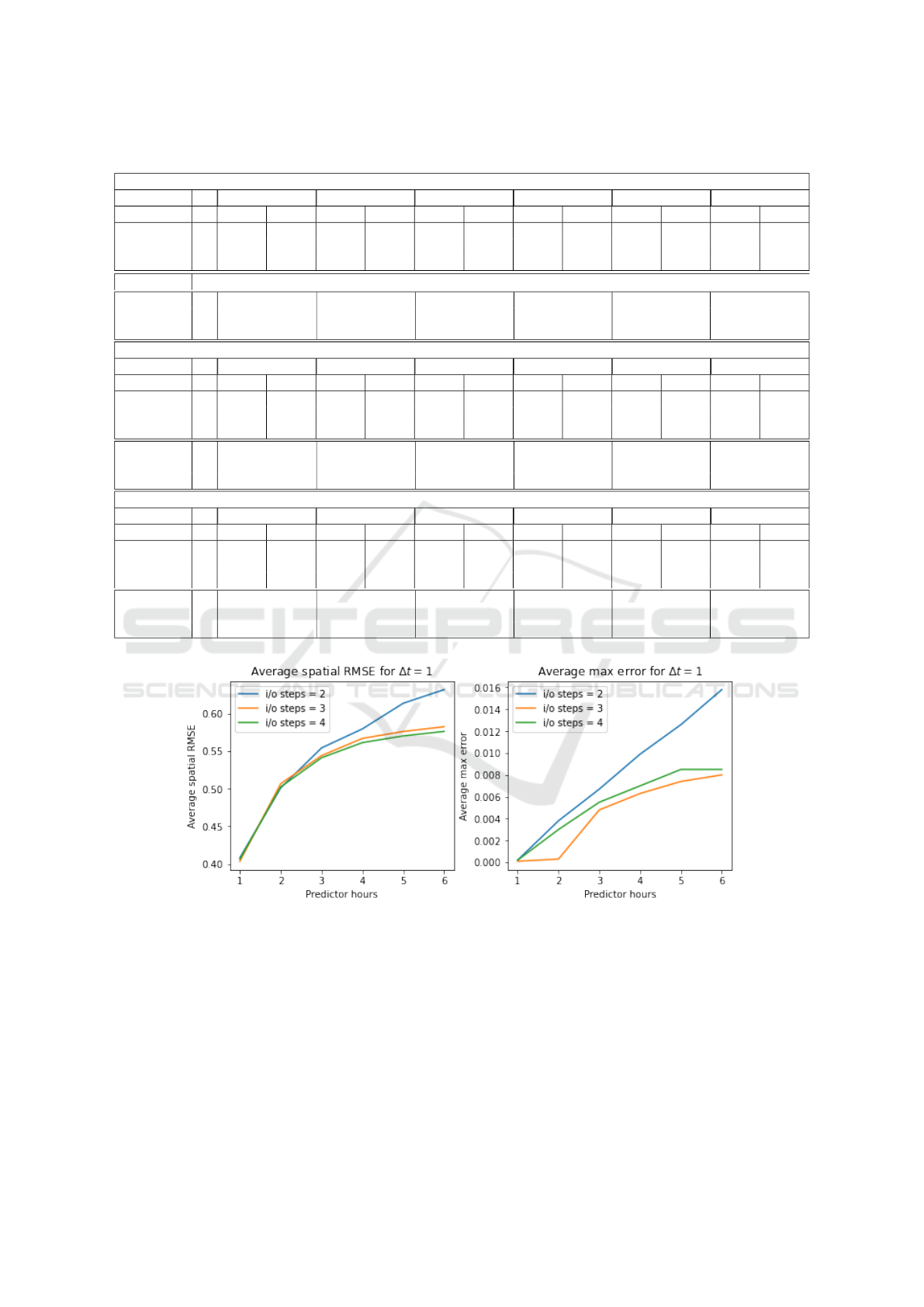
Table 3: Precipitation Error for ∆t = 1, ∆t = 2, ∆t = 3.
∆t = 1
I FH=1 FH=2 FH=3 FH=4 FH=5 FH=6
A N(%) A N(%) A N(%) A N(%) A N(%) A N(%)
Avg Spatial
RMSE
2 0.41 0.5 0.5 0.6 0.55 0.6 0.58 0.7 0.61 0.7 0.63 0.7
3 0.4 0.5 0.51 0.6 0.54 0.6 0.57 0.6 0.58 0.7 0.58 0.7
4 0.41 0.5 0.5 0.6 0.54 0.6 0.56 0.6 0.57 0.6 0.58 0.7
Avg Max
Error
2 0.0002 0.0038 0.0067 0.0099 0.0126 0.0158
3 0.0001 0.0003 0.0048 0.0063 0.0074 0.008
4 0.0002 0.003 0.0055 0.007 0.0085 0.0085
∆t = 2
I FH=2 FH=4 FH=6 FH=8 FH=10 FH=12
A N(%) A N(%) A N(%) A N(%) A N(%) A N(%)
Avg Spatial
RMSE
2 0.49 0.6 0.54 0.6 0.57 0.7 0.58 0.7 0.6 0.7 0.6 0.7
3 0.47 0.5 0.54 0.6 0.58 0.7 0.59 0.7 0.6 0.7 0.6 0.7
4 0.49 0.5 0.55 0.6 0.58 0.6 0.6 0.6 1.28 0.7 0.75 0.7
Avg Max
Error
2 0.0016 0.0057 0.0088 0.01 0.0117 0.0148
3 0.0014 0.0053 0.0088 0.0086 0.0104 0.012
4 0.0026 0.0084 0.0134 0.0194 0.1605 0.0494
∆t = 3
I FH=3 FH=6 FH=9 FH=12 FH=15 FH=18
A N(%) A N(%) A N(%) A N(%) A N(%) A N(%)
Avg Spatial
RMSE
2 0.53 0.6 0.59 0.7 0.61 0.7 0.62 0.7 0.62 0.7 0.63 0.7
3 0.53 0.6 0.59 0.7 0.61 0.7 0.62 0.7 0.63 0.7 0.63 0.7
4 0.55 0.6 0.62 0.7 0.63 0.7 0.64 0.7 0.75 0.8 0.73 0.8
Avg Max
Error
2 0.005 0.014 0.014 0.019 0.017 0.02
3 0.005 0.014 0.015 0.016 0.021 0.016
4 0.006 0.021 0.02 0.017 0.042 0.057
Figure 5: Average Spatial RMSE and Avg(Max) Error For Precipitation Considering ∆t = 1.
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
860
