Storage Assignment Using Nested Annealing and Hamming Distances
Johan Oxenstierna
1,4 a
, Louis Janse van Rensburg
3
, Peter J. Stuckey
2 b
and Volker Krueger
1 c
1
Dept. of Computer Science, Lund University, Lund, Sweden
2
Faculty of Information Technology, Monash University, Australia
3
Optisol, 90 Sippy Downs Dr, QLD, Australia
4
Kairos Logic AB, Lund, Sweden
Keywords:
Storage Location Assignment Problem, Nested Annealing, Hamming Distances.
Abstract:
The assignment of products to storage locations significantly impacts the efficiency of warehouse operations.
We propose a multi-phase optimizer for a Storage Location Assignment Problem (SLAP) where solution qual-
ity is based on a distance estimate of future-forecasted order picking. Candidate assignments are first sampled
using a Markov Chain accept/reject method. Future-forecasted pick-rounds are then modified according to the
candidate assignments and solved as Traveling Salesman Problems (TSP). The model is graph-based and gen-
eralizes to any obstacle layout in 2D. Due to the intractability of the SLAP, methods are proposed to speed up
search for strong solution candidates. These include usage of fast function approximation to find potentially
strong samples, as well as restarts from local minima. Results show that these methods improve performance
and that total travel distance can be reduced by as much as 30% within 8 hours of CPU-time. We share a public
repository with SLAP instances and corresponding benchmark results on the generalizable TSPLIB format.
1 INTRODUCTION
The Storage Location Assignment Problem (SLAP)
concerns the choice of locations for products in a
warehouse. There are dozens of proposed versions
and optimization methods for the SLAP (Charris
et al., 2018). In this paper we consider SLAP opti-
mization for a standard picker-to-parts scenario where
obstacles can be laid out freely on a 2D plane and
where vehicles (human-controlled or autonomous)
may start and end their paths at any location. A can-
didate solution to the SLAP is an assignment of prod-
ucts to locations. We define the quality of a candi-
date solution as the aggregate travel distance needed
to complete a given picking-log, i.e., a set of pick-
rounds (sequences of product visits), added to the re-
assignment distance needed to move products to lo-
cations specified in the candidate solution. A pick-
round is assumed equivalent to a Steiner Traveling
Salesman Problem (TSP) (Valle et al., 2017) where
the origin and destination locations may be different
and where the same location may be revisited by one
or several vehicles. The aggregate TSP distance for
a given assignment is obtained by solving all TSP’s
a
https://orcid.org/0000-0002-6608-9621
b
https://orcid.org/0000-0003-2186-0459
c
https://orcid.org/0000-0002-8836-8816
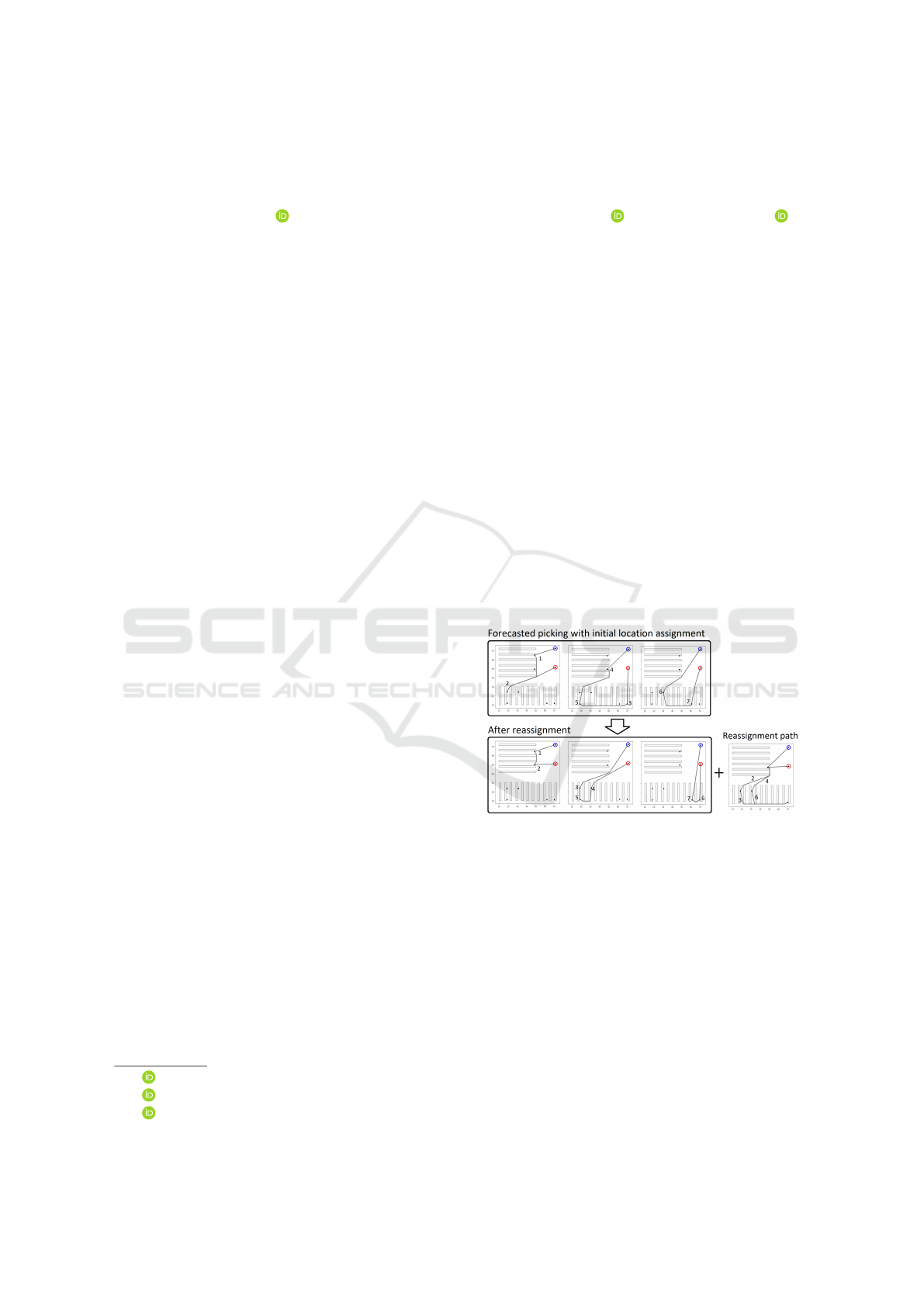
Figure 1: A SLAP example with three pick-rounds (TSP’s)
and an unconventional obstacle-layout. The initial baseline
assignment (top) has a longer picking-log distance com-
pared to a sample/candidate assignment (bottom left). The
reassignment path needed to move the products according
to the sample (bottom right), is longer than any possible
savings concerning the picking-log, however (more pick-
rounds are needed for savings).
in the picking-log according to shortest distance. The
reassignment distance is obtained by optimizing a se-
quence of sub-cycles in a single reassignment path.
We refer to this model as the TSP-based SLAP.
In Section 2 we discuss existing literature on
the SLAP and strengths and weaknesses of various
models, followed by a formulation of the TSP-based
SLAP in Section 4. The proposed model is designed
94
Oxenstierna, J., van Rensburg, L., Stuckey, P. and Krueger, V.
Storage Assignment Using Nested Annealing and Hamming Distances.
DOI: 10.5220/0011785100003396
In Proceedings of the 12th International Conference on Operations Research and Enterprise Systems (ICORES 2023), pages 94-105
ISBN: 978-989-758-627-9; ISSN: 2184-4372
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

with three main assumptions: 1. The SLAP is static,
meaning that the whole picking-log is given apri-
ori. 2. The picking-log is limited in size, contain-
ing no more than a few hundred products. 3. Prod-
ucts cannot be swapped between pick-rounds. These
assumptions can be criticized for simplifying a re-
alistic SLAP. In a realistic SLAP scenario, strong
location assignments can be assumed to vary dy-
namically based on variable demand. Also, there
may be tens-of-thousands of products within a certain
future-forecasted time-period, instead of a few hun-
dred. Thirdly, the pick-rounds may change their prod-
uct compositions through the future-forecasted time-
period. One argument for the proposed model is that it
is layout-agnostic, meaning that it makes no assump-
tions regarding how racks or other obstacles are laid
out in the warehouse. Another argument for the model
is that it poses a challenging problem even without
the stated simplifications: The number of possible as-
signments of products to locations is factorial with re-
gard to number of products (assuming a one-to-one
relationship between products and locations). In or-
der to find a strong assignment, an equilibrium point
between two adversarial NP-hard problems must be
found: 1. The minimization of TSP’s in the picking-
log, and 2. the minimization of the reassignment cost
needed to move products to their assigned locations.
A final argument for the choice of model is the lack
of consensus regarding what should and should not be
included in a basic version of the SLAP, for example
with regard to for benchmark-instances (Charris et al.,
2018). The TSP-based SLAP is our proposal for a
basic version. We offer new public test instances on
the generalizable TSPLIB format (Hahsler and Kurt,
2007) and we invite the community to discuss alter-
native formulations for a basic version of the SLAP.
In Section 5 we introduce our optimization al-
gorithm. It is based on Simulated Annealing and a
Hamming-distance location-swap heuristic. Approx-
imate TSP optimization and restarts from local min-
ima are proposed to improve computational efficiency
(cost improvement through CPU-time). In Section 6
we introduce two datasets, including a publicly shared
benchmark instance set, and corresponding compu-
tational results. All used instances are based on a
bi-directional graph, meaning that no uni-directional
travel conventions are assumed. Our contributions are
summarized as follows:
1. A SLAP optimizer using a novel version of the
Simulated Annealing algorithm and experiments
to test its computational efficiency.
2. A publicly shared SLAP instance set on
the TSPLIB format and corresponding solu-
tions/results.
2 LITERATURE REVIEW
In this section we discuss how the SLAP has been de-
scribed and optimized in previous work. We particu-
larly refer to the extensive literature review by Charris
et al. (2018). There are several strategies for con-
ducting a storage location assignment. These include
Dedicated, Class-based and Random.
• Dedicated. The locations of products are as-
sumed to never change. This strategy is suitable if
the collection of products does not change much
through time. If human picking is used, this ap-
proach has the advantage that pickers can learn
to associate products with locations, allowing for
speed-ups in picking (Zhang et al., 2019).
• Random. Products can be assigned any location in
the warehouse. This is particularly suitable if the
collection of products changes frequently.
• Class-Based (zoning). Each product is assigned
a class and the warehouse is divided into zones.
Each zone contains one or several classes of prod-
ucts. Class-based storage can incorporate ded-
icated and random strategies for certain zones
and/or classes (Mantel et al., 2007)
The quality of a location assignment can be mod-
eled in several ways. Larco et al. ( 2017), for a human
picking scenario, show that there exists a relationship
between the height which products are placed on and
worker welfare. Worker welfare can be quantified
by estimating parameters such as “ergonomic load-
ing”, “discomfort” or “expenditure of human energy”
(Charris et al., 2018). For autonomous vehicle or
shuttle based storage and retrieval systems (AVS/R)
there exists a model which has as objective to mini-
mize “energy consumption” (Azadeh et al., 2019).
Another way to judge solution quality is through
datamining, using computations such as support (pick
frequency), confidence (affinity) and lift. These can
also be used to propose SLAP candidate assignments
(Kofler et al., 2014; Ming-Huang Chiang et al., 2014;
Zhang et al., 2019). Datamining is primarily focused
on the statistical analysis of products and their rela-
tionships, but it is often combined with order-picking
in a SLAP.
A third proposal studies the effect of traffic con-
gestion. Bottlenecks can be caused if too many
products with high pick-frequency are placed close
to depot, for example. Lee et al. (2020), propose
Correlated and Traffic Balanced Storage Assignment
(C&TBSA), a multi-objective SLAP model which
aims to minimize traffic congestion while also min-
imizing aggregate order -picking cost.
Storage Assignment Using Nested Annealing and Hamming Distances
95

Order-picking has many variations, depending
on obstacle layout, picking strategy and travel con-
ventions (Charris et al., 2018; Mantel et al., 2007;
Janse van Rensburg, 2019; Yu and Koster, 2009).
Concerning obstacle layout, we distinguish between
two types: Conventional and Unconventional. In the
conventional layout, warehouse racks are assumed to
be organized in Manhattan style blocks with parallel
aisles and cross-aisles. Conventional layouts are used
in the majority of research on both order-picking and
the SLAP (Charris et al., 2018; Koster et al., 2007).
The unconventional layout includes the “fishbone”
and “cascade” layouts (Cardona et al., 2012; Charris
et al., 2018), as well as all other layouts that are not
conventional. Regardless of layout, the picking path
of a vehicle can be formulated as a Traveling Sales-
man Problem (TSP) where paths cannot intersect ob-
stacles (Henn and W
¨
ascher, 2012). For conventional
layouts, the TSP is often optimized using S-shape
or Largest-Gap algorithms (Roodbergen and Koster,
2001). For unconventional layouts, Google OR-tools
or Concorde have been proposed (Oxenstierna et al.,
2022; Janse van Rensburg, 2019).
If a vehicle picks several orders at a time, an Or-
der Batching Problem (OBP) can be formulated. In
the OBP the objective is to assign sets of orders for
the vehicles (an order is a set of products and a batch
is a set of orders). The OBP can be optimized as a
joint problem with the TSP (Gils et al., 2019; Valle
et al., 2017). Proposals to use the OBP to estimate
SLAP solution quality (OBP-based SLAP) include
K
¨
ubler et al. (2020) and Xiang et al. (2018). The-
oretically, the OBP allows for a strong simulation of
travel in the warehouse, since it includes the search
for product compositions in batch pick-rounds. Using
an OBP within a SLAP also brings noteworthy chal-
lenges, however, since the OBP is highly intractable
(Briant et al., 2020; Oxenstierna et al., 2022).
If batching is not included in the SLAP, heuris-
tics such as Cube per Order Index (COI) (Kal-
lina and Lynn, 1976) and Order Oriented Slotting
(OOS) (Mantel et al., 2007) have been proposed.
COI assumes that products with relatively high pick-
frequency and low volume should be placed close to
depot. COI does not include associations between
products and is therefore mainly suitable for pick-
rounds with few picks, such as pallet-picking or cer-
tain AVS/R systems (Azadeh et al., 2019). OOS, on
the other hand, is specifically designed for scenar-
ios where orders may contain more than one prod-
uct. Mantel et al. (2007) introduce a Quadratic As-
signment Problem (QAP) heuristic which computes
distances between products and the number of times
products appear in the same order. The quality of a
candidate location assignment can then be estimated
using QAP. Similar methods to OOS are used by
ˇ
Zulj
et al. (2018), Fontana and Nepomuceno (2017) and
Lee et al. (2020).
The SLAP usecase can be divided into two cate-
gories depending on the number of products that are
to be moved. “Re-warehousing” is the case when
a large proportion of products are moved, whereas
a smaller proportion is moved in “healing” (Kofler
et al., 2014). Movements can be conducted in many
ways, each accompanied by a (re)assignment “ef-
fort”. K
¨
ubler et al. (2020) propose the following
(re)assignment effort scenarios:
i Product A is moved to an unoccupied location.
ii Product A swaps location with product B.
iii Product A is moved to a location occupied by
product B. Product B is moved to a new location.
If there is a product C occupying the new loca-
tion the procedure continues until a final product
is placed at an empty location.
Scenario (i) comes with the least (re)assignment
effort and the effort grows through scenarios (ii) and
(iii). Apart from travel distance, time used for prod-
uct removal/placement on shelves and administrative
times can be added to the effort computation (K
¨
ubler
et al., 2020).
When it comes to optimization algorithms for the
SLAP, both exact and non-exact methods have been
proposed. The exact algorithms include dynamic pro-
gramming, branch and bound algorithms and Mixed
Integer Linear Programming (MILP) (Charris et al.,
2018). The SLAP search space is often reduced in
scope when exact solutions are sought. These include
restricting the number of locations (Wu et al., 2014),
number of products (Garfinkel, 2005; Liu, 1999) or
by only working with conventional warehouse layouts
(Boysen and Stephan, 2013).
More commonly, non-exact heuristic or meta-
heuristic algorithms are used. Proposals include
Particle Swarm Optimization (PSO) (K
¨
ubler et al.,
2020), Genetic and Evolutionary Algorithms (Ene
and
¨
Ozt
¨
urk, 2011; Lee et al., 2020) and Simulated
Annealing (Kofler et al., 2014; Zhang et al., 2019).
The SLAP is often optimized in multiple phases using
these methods. One example is to first generate candi-
date products for location assignments using datamin-
ing, and then evaluate various candidate assignments
using order-picking optimization (Kofler et al., 2014;
Wutthisirisart et al., 2015).
It is challenging to judge optimization results in
previous work due to the multitude of variations in
SLAP models (Charris et al., 2018). For results in-
cluding reassignment costs, conventional warehouse
ICORES 2023 - 12th International Conference on Operations Research and Enterprise Systems
96

layouts, dynamic picking patterns and meta-heuristic
optimization, Kofler et al. (2014) report best sav-
ings around 21%. In a similar scenario, K
¨
ubler et al.
(2020) report best savings around 22%. Excluding re-
assignment costs, Zhang et al. (2019) report best sav-
ings around 18% on simulated data with thousands
of product locations, also using Simulated Annealing.
In a similar setting, for a few hundred products and
using a heuristic two-phase optimizer, Trindade et al.
(2022) report best savings around 33%.
3 SIMULATED ANNEALING AND
MODIFICATIONS
The proposed optimizer (Section 5) is based on Sim-
ulated Annealing (Algorithm 1). A sample function
draws a sample x
i+1
based on a desired distance to a
previous sample x
i
. The distance is given by some
probability distribution q(x
i+1
|x
i
), and the distribu-
tion is often chosen to be Normal, so that the dis-
tance between x
i+1
and x
i
is low with high prob-
ability (Mackay, 1998). The cost
∗
function com-
putes/retrieves the cost ( f
∗
) of the new/previous sam-
ple (the first sample is retrieved from memory after
the first iteration). The accept probability α
∗
is based
on the solution-space distance function ∆ (which out-
puts a negative value if the new cost is lower than
the previous) and a temperature function T . The tem-
perature enforces high variance at the beginning and
high bias towards the end of optimization (weak new
samples are more often accepted at high temperature)
(Rajasekaran and Reif, 1992). Functions for tempera-
ture T and ∆ are further discussed in Section 5.
The algorithm is a biased random walk and if pro-
portionality between q and f
∗
is large, the random
walk spends more time in regions of local minima.
A known disadvantage of this type of Markov Chain
Monte Carlo (MCMC) method is that each new sam-
ple is correlated to the previous one, risking conver-
gence on weak local minima (Mackay, 1998). Several
methods have been proposed to alleviate this problem,
such as mode-jumping (Tak et al., 2018), Nested An-
nealing (Rajasekaran and Reif, 1992) and Basin Hop-
ping (Wales and Doye, 1997). These methods split the
search space into regions which are then subjected to
local search. Another method is Simulated Annealing
with Restart Strategy (SARS), which restarts the al-
gorithm from a random new sample whenever a “non-
improving” local minimum is found (Yu et al., 2021).
Christen and Fox (2005), propose a method which
can make MCMC algorithms more computationally
efficient, given that there exists a cost function f that
can provide fast and reasonably accurate cost esti-
Algorithm 1: Simulated Annealing.
1: x
i
: Sample (candidate solution).
2: f
∗
(x
i
): Ground truth cost of sample x
i
.
3: q(x
i+1
|x
i
): Probability of distance between two
samples.
4: ∆: Cost distance function.
5: N: Number of iterations.
6: T : Temperature function.
7: x
1
: Initial sample (baseline).
8: for i = 1,...,N do
9: t ← T (i)
10: x
i+1
← sample(q(x
i+1
|x
i
))
11: f
∗
(x
i
), f
∗
(x
i+1
) ← cost
∗
(x
i
,x
i+1
)
12: α
∗
← exp(−c
1
∆( f
∗
(x
i+1
), f
∗
(x
i
))/t)
13: u ← U(0,1) // random uniform
14: if u < α
∗
then // sample accepted
15: x
i
← x
i+1
16: end if
17: end for
mates of f
∗
. They propose to use f to reject new
samples that are unlikely to yield an improvement in
f
∗
over the previous sample. Using their modifica-
tion, the common MCMC accept method is split into
two parts: Promote ( f
∗
evaluation for a sample with
a strong f ) and accept (update x
i
for the next itera-
tion to be a sample with a strong f
∗
). In the proposed
algorithm (Section 5), we make use of this concept
and split Simulated Annealing into promotion based
on fast and less accurate TSP optimization in f and
acceptance based on slow and more accurate TSP op-
timization in f
∗
.
4 PROBLEM FORMULATION
4.1 Objective Function
The objective in the TSP-based SLAP is to minimize
the aggregate travel distance to:
1. Complete a given set of pick-rounds B.
2. Carry out any proposed locations reassignments
in a single reassignment path R .
Each pick-round b ∈ B is a list of products. The set of
all locations (including pick-locations, origin and des-
tinations and obstacle corners in 2D Cartesian space)
is denoted L and the set of all pick-locations is de-
noted L(P ). The set of all products found in B is
denoted P . Each product p ∈ P is a tuple consist-
ing of a unique key (Stock Keeping Unit), a location
l(p) ∈ L(P ) and a positive quantity. Each pick loca-
tion is a tuple consisting of a unique key, a capacity
Storage Assignment Using Nested Annealing and Hamming Distances
97

and a location (represented as a node key in a graph).
A product is located at strictly one location and a loca-
tion stores strictly one product. A product is allowed
to move from its initial location to a new one as long
as the new location’s capacity is not exceeded.
A SLAP solution candidate (also referred to as
sample or assignment) is represented as permutation
vector x ∈ X, where the elements are enumerated
product keys and the indices are enumerated loca-
tion keys. For an example warehouse with 3 loca-
tions, sample x = [2, 1,3] means that product 2 is as-
signed location 1, 1 assigned 2 and 3 assigned 3. Each
x contains permutation integers in the range [1,m],
2 ≤ m ≤ |P | and each permutation has ground truth
cost f
∗
(solution value) (see Equation 1). m denotes
the number of products that are subject to location
change, and it can be set manually to limit the search
space (Section 5). Sample x
1
represents the base-
line product location assignment (the inital locations
of the products). The cost of all subsequent samples
will be compared against the initial baseline cost of
x
1
. The minimization of the picking-log and reassign-
ment distance is as follows,
argmin
x
((
∑
b∈B
D(b)) + λD(R )) (1)
The objective is to find a sample x such that picking-
log distance
∑
b∈B
D(b) and reassignment distance
D(R ) are minimized. The factor λ allows us to weigh
the two costs. Below we show how each of them is
computed.
4.2 Picking-Log Distance
The distance of all pick-rounds in picking-log B
is computed as
∑
b∈B
D(b). D(b) is the distance
of the solution to the Traveling Salesman Problem
(TSP) represented by product locations in b: D(b) =
d
l(origin),l(p
1
)
+ d
l(p
|b|
),l(destination)
+
∑
d
l(p
i
),l(p
j
)
, j =
i + 1,0 < i < |b|, where d
l(p
i
),l(p
j
)
denotes the
distance between the locations of p
i
, p
j
∈ b, and
where d
l(origin),l(p
1
)
connects an origin location and
d
l(p
|b|
),l(destination)
a destination location to the path.
The location of a product l(p
i
) is obtained from an in-
dex in the location assignment sample x. We assume
shortest distances and corresponding shortest paths
(needed if visualization is sought) between pairs of lo-
cations are queryable from Random Access Memory
(RAM). All these shortest distances and paths are pre-
computed using the Floyd-Warshall algorithm on a bi-
directed graph, using a warehouse digitization process
beyond the scope of this paper (Janse van Rensburg,
2019). We allow the origin and destination locations
in the pick-rounds to be any locations in L (this is
sometimes referred to as Multi-Depot TSP or Dial-
a-ride Problem). In Section 5 we describe how TSP
optimization works for the multi-depot requirement.
4.3 Reassignment Distance
Reassignment path R and its distance D(R ) is based
on direct and indirect exchange scenarios (scenarios
(ii) and (iii) (Section 2) with the following assump-
tions: Since there are an equal amount of products
and locations in the formulated SLAP, scenarios (ii)
and (iii) are a bijection of products and locations. We
also assume three enumeration types for the bijection:
Direct exchange, e.g. x
1
= [1, 2] to x
2
= [2, 1] (prod-
uct 2 goes to location 1 and 1 goes to 2), indirect ex-
change, e.g. x
1
= [1, 2,3] to x
2
= [3, 1,2] (1 goes to 2,
2 goes to 3 and 3 goes to 1), or a combination of both.
We also assume direct and indirect exchanges can be
carried out in a single path without intermediate stops
at the depot. Algorithm 2 shows how a single reas-
signment path can be built and optimized just from
information in initial assignment x
1
and subsequent
sample x
i+1
(generated during optimization).
Algorithm 2: Reassignment Path Optimization.
1: x
1
: Initial assignment (baseline solution)
2: x: Sample obtained during optimization
3: x
m
← copy(x)
4: D(R
best
) ← ∞
5: for i = 1,...,K do // optimization iterations.
6: R ← list()
7: while x
m
not empty do
8: r ← list()
9: while not completed(r) do
10: r.add(x,x
m
,x
1
) // add to sub-cycle
11: end while
12: R + = r
13: end while
14: shuffle and flatten(R )
15: D(R
best
) ← update best(R , R
best
)
16: end for
r denotes a sub-cycle of locations (sequence that
starts and ends at the same location). r.add(x,x
m
,x
1
)
has two cases: 1. If r is empty, a random new element
is removed from x
m
and its initial location (the index
for that product in x
1
) is added to r. 2. If r is not
empty, the new location of the last added product in r
is first found in x and added to r. The product which
sits at that “next” location is found in x
1
, matched in
and then removed from x
m
. If the added location to r
is equivalent to the first one in r, the sub-cycle is com-
pleted and r is added to R . After x
m
is emptied, R is
first randomly shuffled and then flattened (the inner
ICORES 2023 - 12th International Conference on Operations Research and Enterprise Systems
98

lists of subcycles are converted into a single list). The
distance D(R ) is then computed as the sum of all lo-
cation to location distances in R , added with the dis-
tance from an origin depot location to the first location
in R and the last location in R to a destination depot
location. At each iteration, the update best(R ,R
best
)
function updates the lowest minimum found by com-
paring distance D(R ) and distance D(R
best
). For Al-
gorithm 1 and Algorithm 3 (below), D(R ) is included
in the cost
∗
and cost functions.
R is a solution to a constrained, linked-list TSP
where a product is dropped off and another product
picked up at each location. The vehicle conducting
the reassignment path is assumed to be able to carry
the whole quantity of one product. A model of the re-
assignment path involving vehicle-capacities, enforc-
ing return trips to depot when a product quantity ex-
ceeds capacity, is left for future work.
5 OPTIMIZATION ALGORITHM
5.1 SLAP Markov Chain Monte Carlo
(MCMC)
We formulate Markovian sampling distribution q
which is capable of proposing a distance from a sam-
ple x
i
to a next sample x
i+1
such that Equation 1 is
minimized. For this to be possible, there must ex-
ist a proportionality between the cost expressed in
Equation 1 and q. We hypothesize that such pro-
portionality exists between the cost and a q involv-
ing a Hamming distance heuristic. Hamming distance
measures the distance between permutations and it
involves counting of non-identical elements between
the permutations (Rathod et al., 2016). The following
sampling distribution is then proposed (loosely based
on bounds proposed by Christen and Fox (2005)):
q(x
i+1
|x
i
) = e
−CH
d
(x
i
,x
i+1
)
P
(2)
where C and P are hyperparameters in R
+
, and H
d
denotes Hamming distance between two samples.
The Hamming distance gives the number of loca-
tion changes compared to the previous sample, and
the number is determined by the q probability. In
the remainder of this section, we propose to use this
sampling function within Algorithm 1. We also pro-
pose methods which may improve computational ef-
ficiency (cost reduction through CPU-time) of Algo-
rithm 1.
5.2 TSP Optimization and Caching
In order to compute the quality of a SLAP solution
candidate, TSP optimization is required. For optimal
TSP solutions we use Concorde
1
(Applegate et al.,
2002). For approximate TSP solutions we use OR-
tools
2
(Kruk, 2018). In order to limit the CPU-time
of OR-tools, its solution limit parameter is set to 500,
which is the maximum number of candidate TSP so-
lutions that it is allowed to evaluate before termi-
nating. Capability to handle multi-depot scenarios
is added by modifying the input distance matrix by
adding a dummy location whose distance is zero to
the origin and destination, and whose other distances
are set to infinite.
Given sampling function q, it is evident that only a
subset of the pick-rounds in the picking-log are going
to be affected by any given product to location assign-
ment (pick-rounds will often not contain reassigned
products). Instead of re-optimizing the same pick-
rounds where no products have changed location, we
instead cache optimal and approximate cost for each
pick-round once computed. For any pick-round, the
saved costs are then queried until one or several prod-
uct locations are changed.
5.3 Nested Annealing
Algorithm 1 can potentially be made more computa-
tionally efficient if there exists a function f which can
quickly estimate f
∗
(Section 3). The modification is
shown in Algorithm 3.
After a sample x
i+1
is generated, its cost is esti-
mated using OR-tools. If the sample passes the pro-
mote filter, cost
∗
is computed using Concorde. The
cost and cost
∗
functions include reassignment dis-
tance D(R ) (Algorithm 2). Since Algorithm 2 does
not guarantee optimality for D(R ), cost
∗
does not
guarantee optimality either, and hence we refer to f
∗
as “more accurate” rather than optimal. Note that
hyperparameters c
1
,c
2
∈ R
+
may be set differently.
Christen and Fox (2005) suggest setting c
1
> c
2
so
that the promotion of a sample is less likely than
the acceptance of a promoted sample. The temper-
ature function T is assumed to be a shifted and scaled
reverse sigmoid (decreasing) that gives temperatures
in range [1,0]. The pairwise solution-space distance
function ∆ is assumed to be a shifted and scaled sig-
moid that gives values in range [0,1]. Nested An-
nealing was first introduced by Rajasekaran and Reif
1
https://math.uwaterloo.ca/tsp/concorde/downloads/d
ownloads.htm, collected 27-05-2022.
2
https://developers.google.com/optimization/routing/t
sp, collected 12-06-2022.
Storage Assignment Using Nested Annealing and Hamming Distances
99
Algorithm 3: Nested Annealing (based on computational
efficiency in cost estimation).
1: x
i
: Sample (candidate solution)
2: f (x
i
): Less accurate fast cost estimate
3: f
∗
(x
i
): More accurate slow cost estimate
4: q(x
i+1
|x
i
): Probability of distance between two
samples
5: α: Probability that sample x
i+1
is promoted
6: α
∗
: Probability that sample x
i+1
is accepted
7: ∆: Cost distance function
8: N: Number of iterations
9: T : Temperature function
10: x
1
: Initial assignment sample (baseline)
11: for i = 1,...,N do
12: t ← T (i)
13: x
i+1
← sample(q(x
i+1
|x
i
))
14: f (x
i
), f (x
i+1
) ← cost(x
i
,x
i+1
)
15: α ← exp(−c
1
∆( f (x
i+1
), f (x
i
))/t)
16: u ← U(0, 1) // random uniform
17: if u < α then // sample promoted
18: f
∗
(x
i
), f
∗
(x
i+1
) ← cost
∗
(x
i
,x
i+1
)
19: α
∗
← exp(−c
2
∆( f
∗
(x
i+1
), f
∗
(x
i
))/t)
20: u ← U(0, 1)
21: if u < α
∗
then // sample accepted
22: x
i
← x
i+1
23: end if
24: end if
25: end for
(1992), but they do not use function approximation
and base the nesting on variable set temperatures in
local search regions. Algorithm 3 provides an alter-
native nesting strategy, based on a tradeoff between
predictive speed and accuracy.
5.4 Restarts
Due to the large search space of the SLAP, the MCMC
sampling function x
i+1
← sample(q(x
i+1
|x
i
)), may
benefit from occasional restarts (Section 2). Yu et
al. (2021), propose restarts from randomly generated
samples. Their test-problems do not include reassign-
ment distances, however, and in the SLAP, randomly
generated samples can be expected to have a signif-
icantly higher cost than x
1
, due to reassignment dis-
tance D(R ). We thus propose restarts from local min-
ima. The best minimum found through optimization
is denoted x
best
and it is used as restart sample with an
increasing probability. Forcing restarts from x
best
is
motivated because its local neighbourhood cannot be
extensively searched for in any but the smallest SLAP
test-instances. Another minimum is denoted x
lowR
and it is used as restart sample with a decreasing prob-
ability (distributions proposed in Section 6). Forcing
restarts from x
lowR
is designed to target a low reas-
signment distance D(R ). The first such local min-
imum is x
lowR
= x
1
, whose D(R ) = 0. x
lowR
= x
1
can be assumed to be a strong local minimum, due to
its lack of reassignment distance, but after f
∗
(x
1
) has
been conclusively beaten, x
lowR
is updated at regular
intervals to a previously generated sample which has
a relatively low f
∗
cost and D(R ). In Section 6 we
present optimization results with and without restarts
from x
best
and x
lowR
.
6 EXPERIMENTS
6.1 Overview
We carry out experiments to investigate the following
topics with regard to computational efficiency (cost
improvement through CPU-time):
1. Utility of Hamming-distance based sampling (q).
2. Utility of restarts.
3. Algorithm 1 compared to Algorithm 3.
4. Other features (such as layout and number of
products and pick-rounds).
All experiments are carried out using Intel Core
i7-4700MQ, 2.40GHz, 4 cores and Python3 (with
heavy use of Cython) and C.
6.2 Parameters
For all experiments, the number of products open for
location reassignment (m) is set to be equivalent to
the number of products in the test-instance. The num-
ber of reassignment path optimization iterations (K
in Algorithm 2) is set to 300. After optimization
has completed, the reassignment path is re-optimized
with K set to 10000. The accept probability computa-
tion is set to be equivalent between Algorithm 1 and 3
(c
2
= 1 and equivalent ∆ and T functions). The ∆
function is set to approach 1 when the ratio of the
distance between a new sample and a previous sam-
ple exceeds 1.05: If a new sample has a distance 5%
higher than the previous sample, it is unlikely to be
promoted and/or accepted. c
1
in Algorithm 3 is set
to 2, which makes it more difficult for a sample to
be promoted than accepted once promoted. The re-
verse sigmoid probability distribution q, which gives
the number of location changes between a new and a
previous sample, is set to approach zero when number
of location changes exceeds 20. For all experiments
where a restart strategy is used, sample x
i+1
can be
built from either x
i
, x
best
or x
lowR
(Section 5). The
ICORES 2023 - 12th International Conference on Operations Research and Enterprise Systems
100
probability to pick one of the latter two is governed
by a sigmoid and reverse sigmoid, respectively, with
probabilities in range [0,0.2] and [0.2, 0], stretched
over N iterations. In all iterations where neither of
the latter two is picked, x
i
is used (no restarts). The
total number of iterations and/or CPU-time is set de-
pending on dataset (see below). λ is set to 1 in all
experiments.
6.3 Datasets
The following two datasets are used:
• 266 TSPLIB instances
3
modified for the SLAP
and shared in a public repository
4
. These in-
stances include 6 different types of warehouse
layouts (including one with no obstacles), all
modeled as bi-directional graphs (without uni-
directional travel-conventions). The number of
products open for location reassignment vary be-
tween 5-427 in these instances. The initial loca-
tions for all products (baseline assignment x
1
) in
these instances is selected using a random uniform
distribution. Solution proposals are uploaded for
each of these instances using Algorithm 3 after a
maximum of 20000 iterations (N). Experiments
to test utility of Hamming distances and restarts
are conducted on this dataset.
• A real warehouse with a conventional layout and
without any uni-directional travel conventions.
The provided picking log for this warehouse in-
cludes 260 unique products and 260 product loca-
tions. There are 200 pick-rounds and most prod-
ucts are picked in several pick-rounds. The ex-
periments where Algorithm 1 and 3 are compared
are run on this dataset. Algorithm 1 and 3 are
run 10 times each on this dataset, with varying
random seeds and a maximum CPU-time set to 8
hours. For a discussion regarding how often stor-
age (re)assignments can be expected to be con-
ducted (which may guide the choice of optimiza-
tion time), see Section 2.
In both datasets, the capacity of all locations is as-
sumed to be identical, meaning that any product can
be placed at any location. We compare costs of sam-
ples against the baseline x
1
, where each product is
fixed to its initial location, where optimal picking
costs are computed in D(B) and where D(R ) = 0.
3
https://github.com/johanoxenstierna/OBP/instances,
collected 19-10-2022.
4
https://github.com/johanoxenstierna/L40 266, col-
lected 14-11-2022
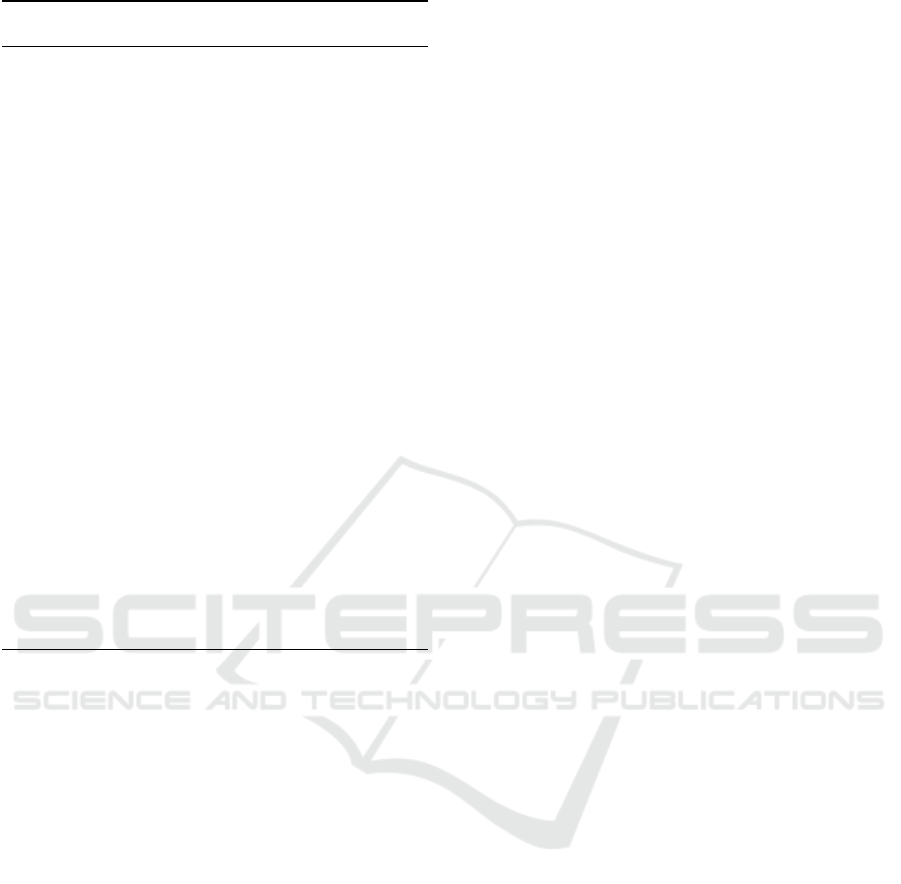
Figure 2: The total number of product location reassign-
ments needs to be large to achieve the best total travel costs
in f
∗
(x
best
).
6.4 Experimental Results
6.4.1 Utility of Hamming-Distance Based
Sampling
Results show that many location reassignments are
needed to reach the best reductions in travel cost (Fig-
ure 2). Also, more reduction in cost is achieved when
the Hamming distance (number of location changes)
between a previous sample and a new one is rela-
tively low (Figure 3). On average, the cost of sam-
ple f
∗
(x
i+1
) is more reduced compared to a previ-
ous sample f
∗
(x
i
) if fewer location changes are at-
tempted. This result empirically validates the Ham-
ming distance distribution q(x
i+1
|x
i
) and its bias to-
ward fewer location changes (Equation 2).
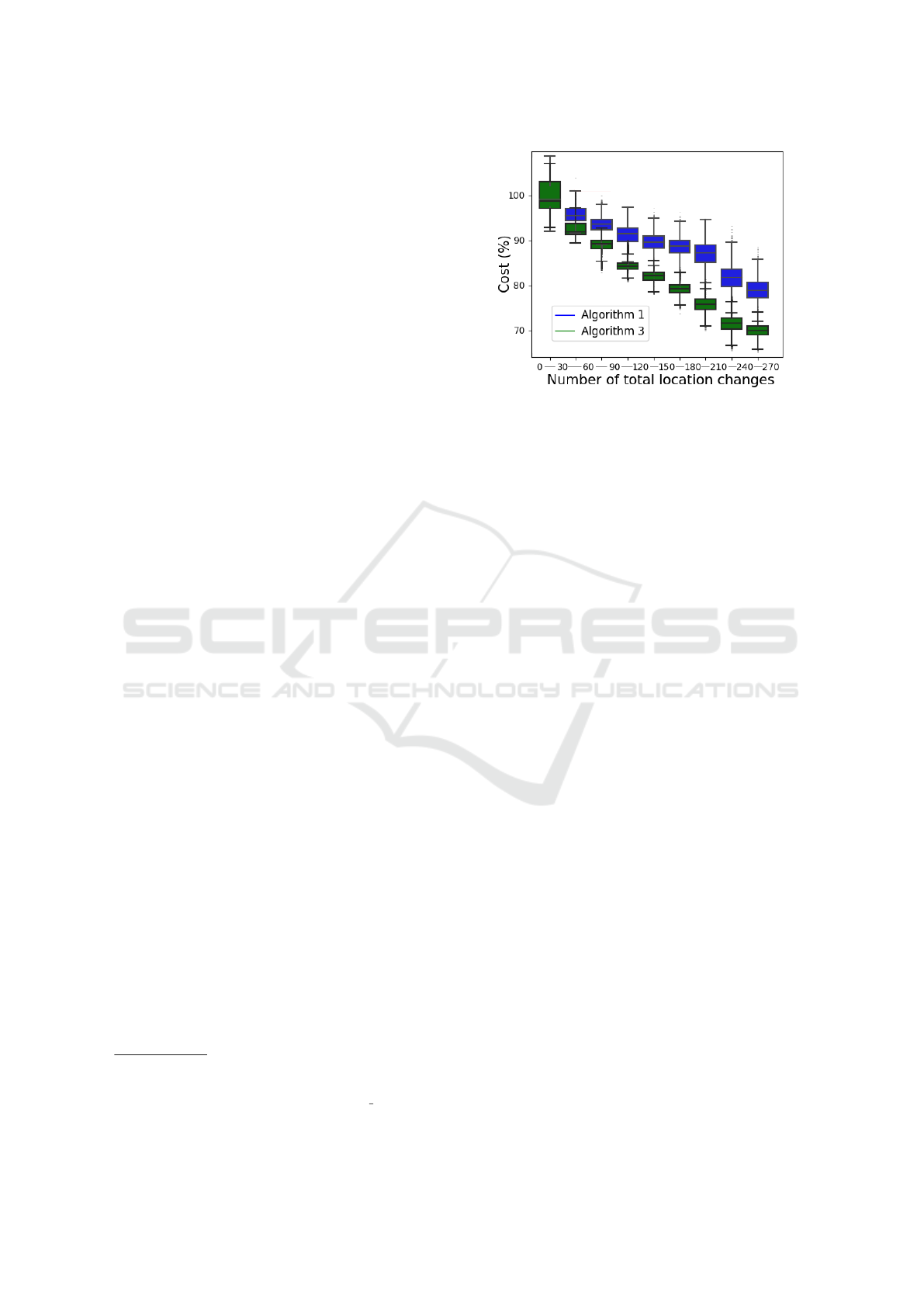
6.4.2 Utility of Restarts
Aggregated results with and without restarts (Section
5) are shown in Figure 4. Given the same amount of
optimization iterations (N = 30000) on the real ware-
house dataset, the best results for both Algorithm 1
and 3 are obtained using restarts. Restarts enforce
revisits to local minima with relatively short total
travel costs f
∗
or reassignment paths D(R ) (Section
5). Since fewer reassignments mean that fewer pick-
rounds contain products whose locations change, TSP
optimization CPU-time is significantly lower when
restarts are used. This is achieved by the caching
of TSP costs (Section 5). Furthermore, few reassign-
ments mean that the optimization of the reassignment
path requires less CPU-time to reach a strong solu-
tion. As can be observed, Algorithm 1 and 3 without
restarts (lighter blue and green) quickly jump up in
cost. This is mainly attributed to the relatively low
cost in initial assignment x
1
, where D(R ) = 0, which
Storage Assignment Using Nested Annealing and Hamming Distances
101
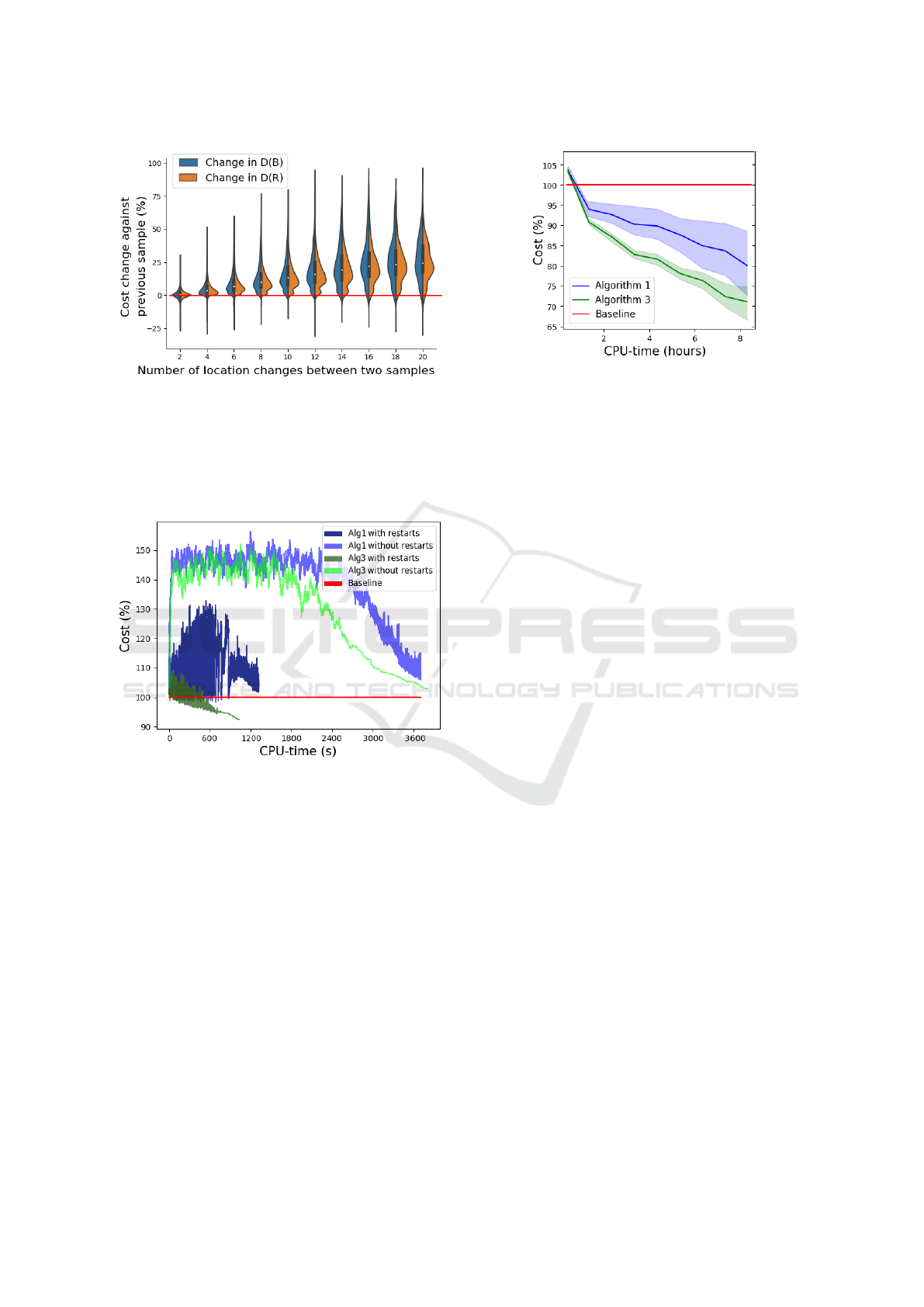
Figure 3: Distribution (violin) plot showing number of loca-
tion changes against picking-log distance D(B) (blue) and
reassignment distance D(R ) (orange) when moving from a
previous sample to a new sample. The mean cost of both
D(B) and D(R ) increase when more location changes are
attempted in new samples. This plot excludes any x
i
and
x
i+1
pairs where either were restarts back to a local mini-
mum.
Figure 4: Algorithm 1 and Algorithm 3 with and without
restarts for 30000 iterations on the real warehouse dataset.
The costs shown are for f
∗
(x
i+1
).
is never revisited once stepped away from and never
improved on (without restarts).
6.4.3 Algorithm 1 Compared to Algorithm 3
Algorithm 3 (Nested Annealing with restarts) out-
performs Algorithm 1 (Simulated Annealing with
restarts) within the given CPU-time (Figure 5). The
Markov chain in Algorithm 3 is more biased com-
pared to the one in Algorithm 1, due to more sam-
ples being rejected. Algorithm 1 accepts more sam-
ples with high cost, which may lead to the discovery
of more attractive search regions, if given more CPU-
time than 8 hours.
Figure 5: Aggregate CPU-time against shortest total travel
cost ( f
∗
(x
best
)) on the real warehouse dataset (20 optimiza-
tion runs): Blue is Algorithm 1, green is Algorithm 3 and
red is the cost of baseline assignment x
1
(100%). The shad-
owed areas represent 95% confidence intervals.
6.4.4 Other Features
Aggregate averages of results on the generated in-
stances and Algorithm 3 are shown in Table 1 (Ap-
pendix). The elements for columns f (x
i
), f
∗
(x
i
),
f (x
i+1
), f
∗
(x
i+1
), f
∗
(x
best
), D(R)
1
D(R)
300
are all
shown as percentages against the distance of the base-
line cost f
∗
(x
1
) (100%). D(R)
1
and D(R)
300
denote
the distance of the reassignment path after Algorithm
2 has been run for 1 and 300 iterations, respectively.
The rows are aggregated averages based on number of
products shown in column 1, from a total of 5279885
samples on the generated instance dataset (with 3-12
minutes CPU-time on each instance). One interesting
result in Table 1 is that the predictive quality of f (x
i
)
is almost identical to f
∗
(x
i
). OR-tools delivers very
strong solutions to the given picking-log B, which is
explainable since pick-rounds b ∈ B rarely exceed 15
locations in length. This means that the strong perfor-
mance of Algorithm 3 with restarts (Figure 4), may
be achievable by Algorithm 1 set up with restarts and
with a higher accept threshold c
1
(instead of using the
promote filter), at least for the used datasets.
No correlation was found between the warehouse
layout (the six ones in the generated instance set)
and features such as total cost improvement, reassign-
ment distance and/or number of final proposed loca-
tion reassignments. This is explainable since both
TSP-optimizers (OR-tools and Concorde) and the re-
assignment path optimizer (Algorithm 2) are layout-
agnostic (Section 1).
7 CONCLUSION
An optimization model for the Storage Assignment
Location Problem (SLAP) was proposed. In the TSP-
ICORES 2023 - 12th International Conference on Operations Research and Enterprise Systems
102

based SLAP, products cannot be swapped between
pick-rounds and future-forecasted picking is assumed
to be static. Furthermore, the warehouse rack layout
is assumed to have any configuration in 2D. An opti-
mizer based on Simulated Annealing, to provide solu-
tions to the TSP-based SLAP, was proposed. The op-
timizer generates assignment samples using a Ham-
ming distance function and two accept filters. A
restart heuristic, which forces occasional revisits to
local minima, is also used. Since products cannot be
reassigned to new locations for free, the distance of a
reassignment path is added to the cost of any gener-
ated sample.
Two datasets were used to evaluate the proposed
optimizer: A real warehouse dataset and a set of pub-
licly shared test-instances on a generalizable format.
The modifications to standard Simulated Annealing
were found to be motivated and the best cost savings,
of around 30%, were achieved after 8 hours of CPU-
time. Overall this result is in line with results in prior
work where strong assumptions are made with re-
gard to warehouse layout (but where dynamicity may
be assumed or where number of products is larger)
(Kofler et al., 2014; K
¨
ubler et al., 2020; Trindade
et al., 2022).
For future work, heuristics to increase bias in the
proposed algorithm could be investigated. These in-
clude zoning, where products are set up to be drawn
to certain areas in the warehouse. Another heuris-
tic is λ (Section 4), and it can be defined to be ad-
justed dynamically (instead of being a constant), to
potentially improve optimization performance and/or
to reflect a more realistic division between the cost
of picking and reassignment of products. For exam-
ple, λ could be set to start at a low value and then
to grow linearly. Setting it to a low value initially
would prevent many samples from being rejected due
to the clear relationship between few number of reas-
signments and low cost reduction (Figure 2). Another
proposal involves analysis of the future-forecast pick-
ing log and how it relates to potential savings. Zhang
et al. (2019) and Kofler et al. (2014) use datamin-
ing heuristics to show that reassignment ”potential”
is correlated to the way in which products in pick-
rounds are distributed. It is challenging to make use
of such heuristics to make concrete proposals for re-
assignments in a Markov chain, however. The TSP-
based SLAP is highly intractable, even though it is a
simplification of storage assignment in realistic use-
cases.
ACKNOWLEDGEMENTS
This work was partially supported by the Wallen-
berg AI, Autonomous Systems and Software Program
(WASP) funded by the Knut and Alice Wallenberg
Foundation. We also convey thanks to Kairos Logic
AB for software.
REFERENCES
Applegate, D., Cook, W., Dash, S., and Rohe, A. (2002).
Solution of a Min-Max Vehicle Routing Problem. IN-
FORMS Journal on Computing, 14:132–143.
Azadeh, K., De Koster, R., and Roy, D. (2019). Robotized
and Automated Warehouse Systems: Review and Re-
cent Developments. Transportation Science, 53.
Boysen, N. and Stephan, K. (2013). The deterministic
product location problem under a pick-by-order pol-
icy. Discrete Applied Mathematics, 161(18):2862 –
2875.
Briant, O., Cambazard, H., Cattaruzza, D., Catusse, N.,
Ladier, A.-L., and Ogier, M. (2020). An efficient
and general approach for the joint order batching and
picker routing problem. European Journal of Opera-
tional Research, 285(2):497 – 512.
Cardona, L. F., Rivera, L., and Mart
´
ınez, H. J. (2012). An-
alytical study of the Fishbone Warehouse layout. In-
ternational Journal of Logistics Research and Appli-
cations, 15(6):365–388.
Charris, E. et al. (2018). The storage location assignment
problem: A literature review. International Journal of
Industrial Engineering Computations, 10.
Christen, J. A. and Fox, C. (2005). Markov Chain Monte
Carlo Using an Approximation. Journal of Computa-
tional and Graphical Statistics, 14(4):795–810.
Ene, S. and
¨
Ozt
¨
urk, N. (2011). Storage location assignment
and order picking optimization in the automotive in-
dustry. The International Journal of Advanced Manu-
facturing Technology, 60:1–11.
Fontana, M. E. and Nepomuceno, V. S. (2017). Multi-
criteria approach for products classification and
their storage location assignment. The Interna-
tional Journal of Advanced Manufacturing Technol-
ogy, 88(9):3205–3216.
Garfinkel, M. (2005). Minimizing multi-zone orders in the
correlated storage assingment problem. PhD Thesis,
School of Industrial and Systems Engineering, Geor-
gia Institute of Technology.
Gils, T. v., Caris, A., Ramaekers, K., and Braekers, K.
(2019). Formulating and solving the integrated batch-
ing, routing, and picker scheduling problem in a real-
life spare parts warehouse. European Journal of Op-
erational Research, 277(3):814–830.
Hahsler, M. and Kurt, H. (2007). TSP – Infrastructure for
the Traveling Salesperson Problem. Journal of Statis-
tical Software, 2:1–21.
Henn, S. and W
¨
ascher, G. (2012). Tabu search heuristics for
the order batching problem in manual order picking
Storage Assignment Using Nested Annealing and Hamming Distances
103

systems. European Journal of Operational Research,
222(3):484–494. Publisher: Elsevier.
Janse van Rensburg, L. J. v. (2019). Artificial intelli-
gence for warehouse picking optimization - an NP-
hard problem. Master’s thesis, Uppsala University.
Kallina, C. and Lynn, J. (1976). Application of the Cube-
per-Order Index Rule for Stock Location in a Distri-
bution Warehouse. Interfaces, 7(1):37–46.
Kofler, M., Beham, A., Wagner, S., and Affenzeller, M.
(2014). Affinity Based Slotting in Warehouses with
Dynamic Order Patterns. (Advanced Methods and
Applications in Computational Intelligence):123–143.
Koster, R. d., Le-Duc, T., and Roodbergen, K. J. (2007).
Design and control of warehouse order picking: A lit-
erature review. European Journal of Operational Re-
search, 182(2):481 – 501.
Kruk, S. (2018). Practical Python AI Projects: Mathemat-
ical Models of Optimization Problems with Google
OR-Tools. Apress.
K
¨
ubler, P., Glock, C., and Bauernhansl, T. (2020). A new
iterative method for solving the joint dynamic storage
location assignment, order batching and picker rout-
ing problem in manual picker-to-parts warehouses.
147:106645.
Larco, J. A., Koster, R. d., Roodbergen, K. J., and Dul, J.
(2017). Managing warehouse efficiency and worker
discomfort through enhanced storage assignment de-
cisions. International Journal of Production Re-
search, 55(21):6407–6422.
Lee, I. G., Chung, S. H., and Yoon, S. W. (2020). Two-stage
storage assignment to minimize travel time and con-
gestion for warehouse order picking operations. Com-
puters & Industrial Engineering, 139:106129.
Liu, C.-M. (1999). Clustering techniques for stock location
and order-picking in a distribution center. Computers
& Operations Research, 26(10):989–1002.
Mackay, D. J. C. (1998). Introduction to Monte Carlo Meth-
ods. In Learning in Graphical Models.
Mantel, R. et al. (2007). Order oriented slotting: A new as-
signment strategy for warehouses. European Journal
of Industrial Engineering, 1:301–316.
Ming-Huang Chiang, D., Lin, C.-P., and Chen, M.-C.
(2014). Data mining based storage assignment heuris-
tics for travel distance reduction. Expert Systems,
31(1):81–90. Publisher: Wiley Online Library.
Oxenstierna, J., Malec, J., and Krueger, V. (2022). Analysis
of Computational Efficiency in Iterative Order Batch-
ing Optimization. In Proceedings of the 11th Interna-
tional Conference on Operations Research and Enter-
prise Systems - ICORES,, pages 345–353. SciTePress.
Rajasekaran, S. and Reif, J. H. (1992). Nested annealing: a
provable improvement to simulated annealing. Theo-
retical Computer Science, 99(1):157–176.
Rathod, A. B., Gulhane, S. M., and Padalwar, S. R. (2016).
A comparative study on distance measuring approches
for permutation representations. In 2016 IEEE inter-
national conference on advances in electronics, com-
munication and computer technology (ICAECCT),
pages 251–255. IEEE.
Roodbergen, K. J. and Koster, R. (2001). Routing methods
for warehouses with multiple cross aisles. Interna-
tional Journal of Production Research, 39(9):1865–
1883.
Tak, H., Meng, X.-L., and Dyk, D. A. v. (2018). A Re-
pelling–Attracting Metropolis Algorithm for Multi-
modality. Journal of Computational and Graphical
Statistics, 27(3):479–490.
Trindade, M. A. M., Sousa, P., and Moreira, M. (2022).
Ramping up a heuristic procedure for storage loca-
tion assignment problem with precedence constraints.
Flexible Services and Manufacturing Journal, 34.
Valle, C., Beasley, J. E., and da Cunha, A. S. (2017). Opti-
mally solving the joint order batching and picker rout-
ing problem. European Journal of Operational Re-
search, 262(3):817–834.
Wales, D. J. and Doye, J. P. K. (1997). Global Optimiza-
tion by Basin-Hopping and the Lowest Energy Struc-
tures of Lennard-Jones Clusters Containing up to 110
Atoms. Journal of Physical Chemistry A, 101:5111–
5116.
Wu, J., Qin, T., Chen, J., Si, H., and Lin, K. (2014). Slot-
ting Optimization Algorithm of the Stereo Warehouse.
In Proceedings of the 2012 2nd International Confer-
ence on Computer and Information Application (IC-
CIA 2012), pages 128–132. Atlantis Press.
Wutthisirisart, P., Noble, J. S., and Chang, C. A. (2015). A
two-phased heuristic for relation-based item location.
Computers & Industrial Engineering, 82:94–102.
Xiang, X., Liu, C., and Miao, L. (2018). Storage as-
signment and order batching problem in Kiva mo-
bile fulfilment system. Engineering Optimization,
50(11):1941–1962.
Yu, M. and Koster, R. B. M. d. (2009). The impact of or-
der batching and picking area zoning on order pick-
ing system performance. European Journal of Opera-
tional Research, 198(2):480 – 490.
Yu, V. F., Winarno, Maulidin, A., Redi, A. A. N. P., Lin,
S.-W., and Yang, C.-L. (2021). Simulated Annealing
with Restart Strategy for the Path Cover Problem with
Time Windows. Mathematics, 9(14).
Zhang, R.-Q. et al. (2019). New model of the storage loca-
tion assignment problem considering demand corre-
lation pattern. Computers & Industrial Engineering,
129:210–219.
ˇ
Zulj, I., Glock, C. H., Grosse, E. H., and Schneider, M.
(2018). Picker routing and storage-assignment strate-
gies for precedence-constrained order picking. Com-
puters & Industrial Engineering, 123:338–347.
ICORES 2023 - 12th International Conference on Operations Research and Enterprise Systems
104
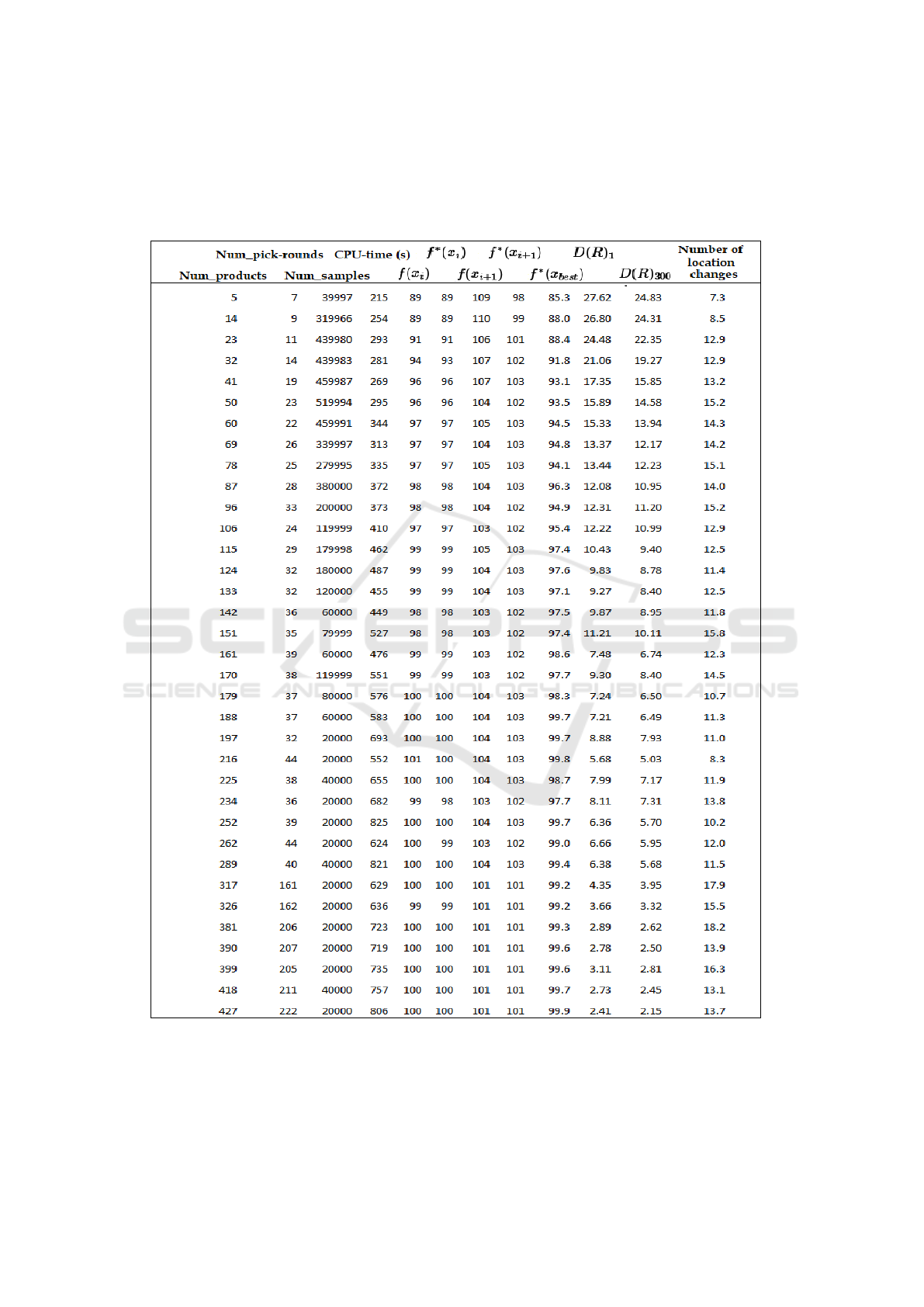
APPENDIX
Table 1: Aggregate averages of results from 5279885 generated samples for optimization runs on the 266 publicly
shared instances. The results are aggregated based on ranges of number of products (the first column).
Storage Assignment Using Nested Annealing and Hamming Distances
105
