
Automated Agent Migration over Distributed Data Structures
Vishnu Mohan
a
, Anirudh Potturi
b
and Munehiro Fukuda
c
Division of Computing and Software Systems, University of Washington Bothell, U.S.A.
Keywords:
ABM, Agent Migration, Data Structures, Data Analysis, Parallel Computing.
Abstract:
In contrast to conventional data streaming, we take an agent-based approach where a large number of reactive
agents collaboratively analyze attributes or shapes of distributed data structures that are mapped over a cluster
system. Our approach benefits distributed graph database and GIS as agents are dispatched to data of interest
and navigate over nearby structured data for further exploration and exploitation. The successful key to this
approach is how to code agent propagation, forking, and flocking over data structures. We automated such
agent migration in our MASS (multi-agent spatial simulation) library and wrote four benchmark programs
with these migration functions. The benchmarks include breadth-first search, triangle counting, range search,
and closet pair of points in space. This paper demonstrates improvements of parallel performance with the
automated migration and presents our programmability comparison with Repast Simphony.
1 INTRODUCTION
Conventional big-data computing takes so-called
data-streaming approach that keeps pipelining
datasets to distributed data-analyzing libraries such
as MapReduce and Spark. While such datasets
are described in a structured file format, (e.g.,
CSV, XML, or JSon), they pass through distributed
memory as text data rather than form distributed
data structures (including graphs or geometric data
space). Therefore, data streaming has challenges in
repetitive data retrievals from and data analysis using
distributed graph database or GIS although it is still
used to feed initial data to these databases.
In contrast, we apply agent-based modeling
(ABM) to analyses of distributed data struc-
tures (Fukuda et al., 2020). Our approach constructs
graphs or arrays over a cluster system, dispatches a
large number of reactive agents to the datasets, and
have the agents compute data attributes or shapes.
Applying ABM to data science has been used in bio-
inspired optimization algorithms such as ant colony
optimization (ACO) (Blum, 2005). However, they
generally populate only tens of agents over a plain
dataset. Our work is differentiated in handling mil-
lions of agents over a distributed data structure.
To verify the efficiency of our agent-based data
a
https://orcid.org/0000-0002-1224-2950
b
https://orcid.org/0000-0002-9270-9628
c
https://orcid.org/0000-0001-7285-2569
analysis, we previously implemented benchmark pro-
grams with our MASS (multi-agent spatial simula-
tion) library (Fukuda et al., 2020). These include
breadth first search, triangle counting, ACO, particle
swarm optimization, K-means, and K-nearest neigh-
bors. These benchmark programs revealed that our
approach and MASS library need two improvements
towards the practicalization (Gordon et al., 2019):
spatial description and agent migration support. As
we have addressed agent-navigable graph structures
including their construction (Gilroy et al., 2020),
pipelined computation (Hong and Fukuda, 2022), and
visualization (Blashaw and Fukuda, 2022), this paper
focuses on agent migration.
Agent migration we consider includes propaga-
tion, forking, and flocking over a graph and a 2D con-
tiguous space, both mapped to a cluster system. Hav-
ing reviewed the above applications, we formulated
common patterns of agent migration and automated
them as migration functions. Using the new auto-
mated migration, we then reimplemented breadth-first
search, triangle counting, range search, and closet pair
of points for our verification purposes.
This paper presents the following three endeavors
of agent migration: (1) an implementation of new mi-
gration functions and platforms to support these func-
tions, (2) performance improvements in agent-based
graph and geometric computation, and (3) simplifi-
cation of MASS agent code as well as programma-
bility comparison between MASS and Repast Sim-
Mohan, V., Potturi, A. and Fukuda, M.
Automated Agent Migration over Distributed Data Structures.
DOI: 10.5220/0011784500003393
In Proceedings of the 15th International Conference on Agents and Artificial Intelligence (ICAART 2023) - Volume 1, pages 363-371
ISBN: 978-989-758-623-1; ISSN: 2184-433X
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
363

phony (North et al., 2007). The rest of this paper
is organized as follows: Section 2 considers con-
ventional ABM systems’ agent migration over dis-
tributed datasets and clarifies their challenges; Sec-
tion 3 designs and implements automated agent mi-
gration in MASS; Section 4 demonstrates improve-
ments of migration performance and programmabil-
ity, using graph and geometric benchmark programs;
and Section 5 concludes our discussions.
2 RELATED WORK
When applying ABM concepts to analysis of dis-
tributed data structures, we need to consider execution
performance and programmability for parallelization.
The former has been supported by MPI-based ABM
simulators represented by FLAME (Holcombe et al.,
2006) and RepastHPC (Collier and North, 2013).
Since their utmost goal is ABM parallel performance,
their C/C++ coding frameworks do not best support
programmability nor data visualization. However,
most interests of data scientists are quick coding and
easy visualization, for which they prefer interpretive
or script languages, (e.g., Java and Python). From this
viewpoint, we assume what if these scientists would
use NetLogo (NetLogo Models, 1999) or Repast Sim-
phony (North et al., 2007) as interpretive ABM sys-
tems when conducting their data analysis. Based on
our assumption, we focus on their descriptive features
for having agents migrate over data structures and an-
alyze their attributes.
NetLogo (NetLogo Models, 1999) supports agent
migration in a 2D continuous space and provides
agents with pre-defined behaviors that can be utilized
by the model designers. It includes migration func-
tions such as FORWARD, BACKWARD, RIGHT,
LEFT, HATCH, DIE, JUMP and MOVE-TO. FOR-
WARD/BACKWARD enables agents to move for-
ward and backward from their current position in the
environment. RIGHT/LEFT enables agents to change
the direction of movement. DIE removes agents from
the environment. HATCH spawns new agents that in-
herit properties from their parent agent. MOVE-TO
moves agents to a given coordinate.
Repast Simphony (North et al., 2007) is another
ABM system that provides pre-defined agent migra-
tion and behavior. This includes moveByDisplace-
ment, moveByVector, moveTo, VNContains, and
MooreContains. MoveByDisplacement moves agents
from their current location by a specified distance.
MoveByVector moves agents by a given distance
along a specified angle. MoveTo moves agents from
their current location to a new location. VNContains
determines whether or not a particular agent is in the
von Neumann neighborhood of a particular source.
MooreContains determines whether or not a particu-
lar agent is in the Moore neighborhood of a particular
source.
MASS has three versions, each in Java, C++, and
CUDA. For data sciences, we use MASS Java. The
library distinguishes two classes: Places and Agents.
The former constructs a multi-dimensional array over
a cluster system, whereas the latter populates and
walks agents over the array. For graph computing,
users can instantiate GraphPlaces that incrementally
constructs a distributed graph where agents move
along its edges. The library supports basic agent-
navigation and life-cycle-management functions: mi-
grate() to move agents to a specified place index;
spawn() to create new agents as inheriting their parent
properties; and kill() to terminate the calling agents.
All Places and Agents computation is performed in
parallel through their callAll() from the main() func-
tion. In addition, Places facilitates inter-place com-
munication with exchangeAll(), whereas Agents com-
mits all agent creation, termination, and migration at
once with manageAll().
All these ABM libraries define basic agent migra-
tion methods. However, they do not provide functions
that automate agent propagation and migration over
a graph or a 2D space. Users have to build custom
agent migration functions that would use these basic
migrations, which requires their significant program-
ming capabilities to successfully perform data analy-
sis. Inability to automate agent navigational functions
gives a big burden to data scientists who hopes to con-
duct big-data computing with ABM. Knowledge of
these limitations motivated us to upgrade MASS Java
for supporting intelligent agent migration and propa-
gation out of the box.
3 ABSTRACTION OF AGENT
MIGRATION
This section first looks at several applications in graph
computing and computational geometry to find com-
mon patterns of agent migration. Thereafter, we will
explain their implementation and our infrastructural
supports for automated migration.
3.1 Application-Based Agent Migration
We consider the following five categories of appli-
cations: (1) breadth-first search (BFS); (2) trian-
gle counting and connected components; (3) range
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
364
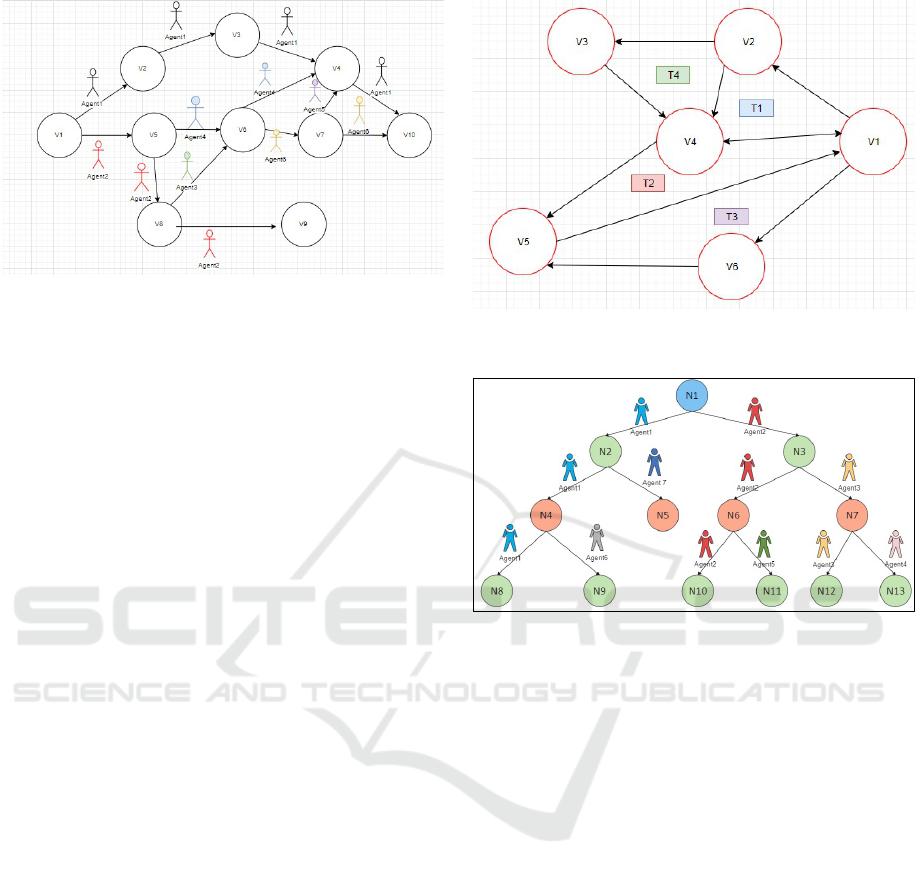
Figure 1: Agent propagation over a graph in BFS.
search; (4) the closet pair of points (CPP), Voronoi di-
agram construction, and K-nearest neighbors (KNN);
and (5) Dijkstra’ algorithms and ant colony optimiza-
tion (ACO).
3.1.1 BFS
This graph algorithm disseminates agents over a
graph until all vertices have been visited. Upon visit-
ing a next vertex, an agent needs to check if the cur-
rent vertex has been visited by another agent. If not, it
propagates its child agents to each of all neighboring
vertices except where it came from. To mitigate agent
creation and termination overheads, a parent agent it-
self should choose one of the next vertices to visit as
shown in Figure 1. We implement this feature in the
migratePropagate() function.
3.1.2 Triangle Counting and Connected
Components
To count the number of triangles in a graph, agents
walk on consecutively connected edges three times.
Those who come back to their original vertex can
report that they have successfully traveled around
a triangle. To avoid double-counting the same tri-
angle, agents are supposed to choose a next vertex
with a lower ID than the current vertex for the first
two walks (see Figure 2). This is a special form
of migratePropagate() which we name migrateProp-
agateDownStream(). For their third walk, agents
must fetch an edge that leads back to their birth-
place. We implement this migration in migrateOrig-
inalSource(). Connected components have an agent
start its walk from each vertex with migrationProp-
agateDownStream(). As far as an agent successfully
migrates to a next vertex, it concurs this vertex with
the original vertex ID it is carrying from where it got
started. This eventually colors all connected vertices
with the largest vertex ID among them.
Figure 2: Edge traverses down to graph vertices with a
lower ID in triangle counting.
Figure 3: K-D tree traverse.
3.1.3 Range Search
Given a set of data points in a 2D space, range search
first creates a k-d tree that recursively halves a space
along the x- and y-axes in turn so that left and right or
upper and lower spaces have the same number of data
points. To search for data points in a range of inter-
est, agents traverse from the tree root down to nodes
whose coverage is overlapped with the given range.
This computation involves a dynamic tree construc-
tion and agent propagation from the tree root. We
implement such agent propagation in migratePropa-
gateTree() that allows an agent to migrate along left,
right, or both links from the current tree node. As il-
lustrated in Figure 3, a parent agent must choose one
of tree links, which saves the number of agents to be
spawned.
3.1.4 CPP, Voronoi Diagram, and KNN
These applications simulate a ripple propagation from
each data point, which can be mimicked by repeti-
tively cloning agents from their current coordinates
to von Neumann or Moore neighborhood in turn, as
shown in Figure 4. The very first agent that encoun-
ters another data point finds the closet pair of points.
Automated Agent Migration over Distributed Data Structures
365
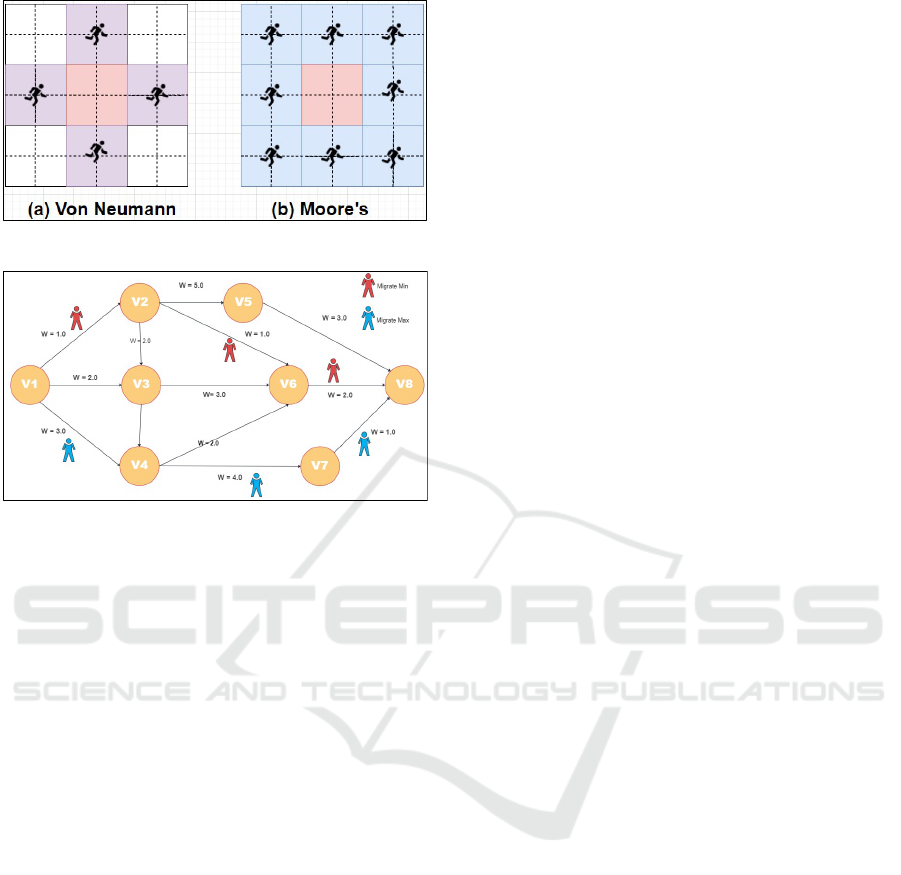
Figure 4: Ripple propagation over a 2D space.
Figure 5: Ants following the max amount of pheromone in
ACO.
Agent collision draws a bisector line between a pair
of two data points, which is considered as a Voronoi
edge. KNN simulates only one ripple propagation
from a test sample until the ripple covers N data points
in the same group.
3.1.5 Dijkstra’s Algorithm and ACO
Agents need to move along an edge whose weight
is either minimum or maximum among all edges
emanating from the current vertex. Dijkstra’s algo-
rithm chooses the shortest edge, while ACO choose
the edge with the largest amount of pheromone (see
Figure 5). In particular, an ant in ACO needs
to also choose a random edge for exploring new
routes. We implement these semantically directional
migrations in migrateMin(), migrateMax(), and mi-
grateRandom() respectively.
3.2 Mechanisms for Supporting
Abstraction
To support the new migration functions we formu-
lated in Section 3.1, we first modified the MASS li-
brary’s agent and place management mechanisms, as
described below.
3.2.1 Agent Management
Derived from the Agent base class, SmartAgent im-
plements not only all the new migration functions
but also makes accessible additional properties: track,
prev, and next, each representing a chronological ID
list of places an agent navigated through so far, the ID
of the previous place it visited, and that of the next
place it will move to.
The new agent life-cycle management enhances
agent migration with a merger of spawn() and
migrate() functions. In contrast to the origi-
nal MASS library that needs two invocations of
Agents.callAll()/Agents.manageAll() pair, the first to
commit spawn() and the second to commit migrate(),
the new spawn() function can dispatch child agents
to new destinations instantly in one invocation of
callAll() and manageAll(). This halves thread control
and inter-cluster communication overheads as each
call handles agent with multi-threading and involves
a cluster-wide barrier synchronization.
3.2.2 Spatial Management
SmartPlace is a subclass of the Place base class for
providing a user application with additional spatial
properties such as a list of neighboring places and
their logical distances. These properties are used in
the logic to implement Agent.migratePropagate() that
clones a calling agent to all neighboring vertices.
Instead of mimicking a binary or k-d tree with
GraphPlaces at a user level, we implement Binary-
TreePlaces, each including left and right branch ref-
erences to its child places. This new class eases our
Agent.migratePropagateTree() implementation. Fur-
thermore, it allows main() to add a new leaf to a given
tree node without any user-level agent deployment
that needs to manually perform this leaf addition.
3.3 An Implementation of Migration
Functions
Given the new mechanisms to support agent migra-
tion, below we explain each migration function.
1. migratePropagate(): has a calling agent declare
its migration to the first neighbor that is not the
previous vertex (lines 9-16 in Listing 1). IDs of all
the other neighbors are packetized in an argument
list (lines 17-22). It is passed to spawn() (line 23)
that creates the same number of child agents and
dispatches each to a different vertex.
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
366

Listing 1: Propagating to unvisited neighboring vertices.
1 public void migratePropagate( int time ) {
2 int[] nbrs = getPlace( ).getNeighbors( );
3 if ( getPlace( ).footprint || nbrs.length == 0 ) {
4 kill( ); // already visited or no more edges to
traverse
5 return;
6 }
7 getPlace( ).footprint = true;
8 int prev = −1; int next = −1;
9 if ( nbrs.length == 1 ) {
10 next = nbrs[0];
11 } else { // find the first neighbor, (i.e., next) to visit
12 for ( int i = 1; i < track.length; i++ )
13 if ( track[i] == −1 ) prev = track[i − 1];
14 next = ( nbrs[0] != prev ) ? nbrs[0] : nbrs[1];
15 }
16 migrate( next ); // the parent agent migrates to
next
17 int[] dests = new int[nbrs.length − 1]
18 for ( int i = 1; i < nbrs.length; i++ ) {
19 if ( nbrs[i] == prev || nbrs[i] == next )
20 continue;
21 dests[j++] = nbrs[i] // each child gets a different
dest.
22 }
23 spawn( dests.length, dest ); // children dispatched
24 }
Listing 2: Migrating to the source vertex.
1 public void migrateOriginalSource( ) {
2 int[] neighbors = getPlace( ).getNeighbors( );
3 boolean found = false;
4 for ( int i = 0; i < neighbors.length; i++ ) {
5 if ( neighbors[i] == track[0] ) {
6 migrate( neighbors[i]] ); // found the source
7 break;
8 } }
9 if ( !found ) kill( ); // no way to go back to the
source
10 }
2. migratePropagateDownStream(): needs to add
“nbrs[i] > getPlace( ).ID” to line 19’s if state-
ment in Listing 1.
3. migrateOriginalSource(): scans all the neighbor-
ing vertices and identifies the one whose ID is this
agent’s track[0] where it needs to go back (lines
4-6 in Listing 2).
4. migratePropagateTree(): checks which of left,
right, or both paths a calling agent needs to go
(lines 9, 11, and 15 in listing 3). If the desired
path exists, the agent can migrate along it (lines
13 and 17). If necessary, the calling agent forks a
child to the right direction while taking left as its
own direction (line 10).
5. migratePropagateRipple(): receives the current
time to decide which of von Neumann or Moore
neighborhood a calling agent should take for its
2D propagation. As shown in listing 4, if time
is even, the agent propagates its copies to north,
Listing 3: Migrating down to child tree nodes.
1 public void migratePropagateTree( int path ) {
2 if ( getPlace( ).footprint ) {
3 kill( );
4 return;
5 }
6 getPlace( ).footprint = true;
7 int left = getPlace( ).left; int right = getPlace( ).
right;
8 switch( path ) {
9 case BothBranch: // go left and dispatch a child
right
10 if ( left != −1 && right != −1 ) spawn( 1,
right );
11 case LeftBranch:
12 if ( left != −1 )
13 migrate( left );
14 return;
15 case RightBranch:
16 if ( right != −1 )
17 migrate( right );
18 return;
19 }
20 kill( ) // no way to go
21 }
Listing 4: Propagating over 2D.
1 public void migratePropagateRipple( int time ) {
2 if ( getPlace( ).footprint ) {
3 kill( );
4 return;
5 }
6 getPlace( ).footprint = true;
7 int nAgs = ( time % 2 == 0 ) ? 4 : 8; // #neighbors
8 Vector<int[]> nbrs = new Vector<int[]>( nAgs
);
9 int[] cur = getPlace( ).coordinates;
10 // N, E, S, and W propagations
11 nbrs.get(0)[0] = cur[0]; nbrs.get(0)[1] = cur[1]+1;
12 nbrs.get(1)[0] = cur[0]+1; nbrs.get(1)[1] = cur[1];
13 nbrs.get(2)[0] = cur[0]; nbrs.get(2)[1] = cur[1]−1;
14 nbrs.get(3)[0] = cur[0]−1; nbrs.get(3)[1] = cur[1];
15 if ( nAgs == 8 ) { // #agents == 8 in Moore’s
16 // NE, SE, SW, and NW propagations
17 nbrs.get(4)[0] = cur[0]+1; nbrs.get(4)[1] = cur
[1]+1;
18 nbrs.get(5)[0] = cur[0]+1; nbrs.get(5)[1] = cur
[1]−1;
19 nbrs.get(6)[0] = cur[0]−1; nbrs.get(6)[1] = cur
[1]−1;
20 nbrs.get(7)[0] = cur[0]−1; nbrs.get(7)[1] = cur
[1]+1;
21 }
22 spawn( nAgs, nbrs ); // propagate ripples to
neighbors
23 kill( ); // no more ripple at the current coordinates
24 }
east, south, and west only (lines 11-14). Other-
wise, it also clones itself to northeast, southeast,
southwest, and northwest (lines 17-20). The call-
ing agent then gets terminated (line 23).
6. migrateMax(): chooses the one with the maxi-
mum weight among all edges emanating from the
current vertex. Listing 5 shows no special tech-
niques but can save lines of user-level code.
Automated Agent Migration over Distributed Data Structures
367
Listing 5: Migrating along the max-weighted edge.
1 public void migrateMax( ) {
2 int[] neighbors = getPlace( ).getNeighbors( );
3 int[] weights = getPlace( ).getWeights( );
4 int weight = Integer.MIN VALUE;
5 int maxIndex = 0;
6 for ( int i = 0; i < weights.length; i++ ) {
7 if ( weight < weights[i] ) {
8 weight = weights[i];
9 maxIndex = i;
10 } }
11 migrate( neighbors[maxIndex] );
12 }
Table 1: Benchmark programs and test parameters.
Methods Applications
Test
Parameters
MigratePropagate BFS
Graphs with
100, 500, 1K,
and 2K
vertices
MigratePropagateDownStream
Triangle Counting
Graphs with
1K, 3K, 10K
MigrateOriginalSource vertices
MigratePropagateTree
(BothBranch)
Range Search
Trees with
100, 100K,
MigratePropagateTree
(LeftBranch)
and 200K
vertices
MigratePropagateTree
(RightBranch)
MigratePropagateRipple CPP
2D continuous
space with 64,
100, 100K,
and 200K data
points
4 EVALUATION
Our performance and programmability evaluation
used four benchmark programs: BFS, triangle count-
ing, range search, and CPP. The first two programs
are graph computing, whereas the last two are catego-
rized in computational geometry.
For the performance evaluation, we coded these
four benchmark programs with MASS Java in two
version: one without using the automated migration
functions and the other using these functions. (In the
following discussions, we distinguish them as legacy
MASS and new MASS, respectively.) Then, we ran
them on a cluster of four Linux machines, each with
a Xeon Gold 6130 @ 2.10GHz processor and 16GB
memory. The measurements were repeated five times
for each of spatial parameters as listed in Table 1.
For the programmability evaluation, we first com-
pared legacy and new MASS versions to demonstrate
substantial improvements when using the automated
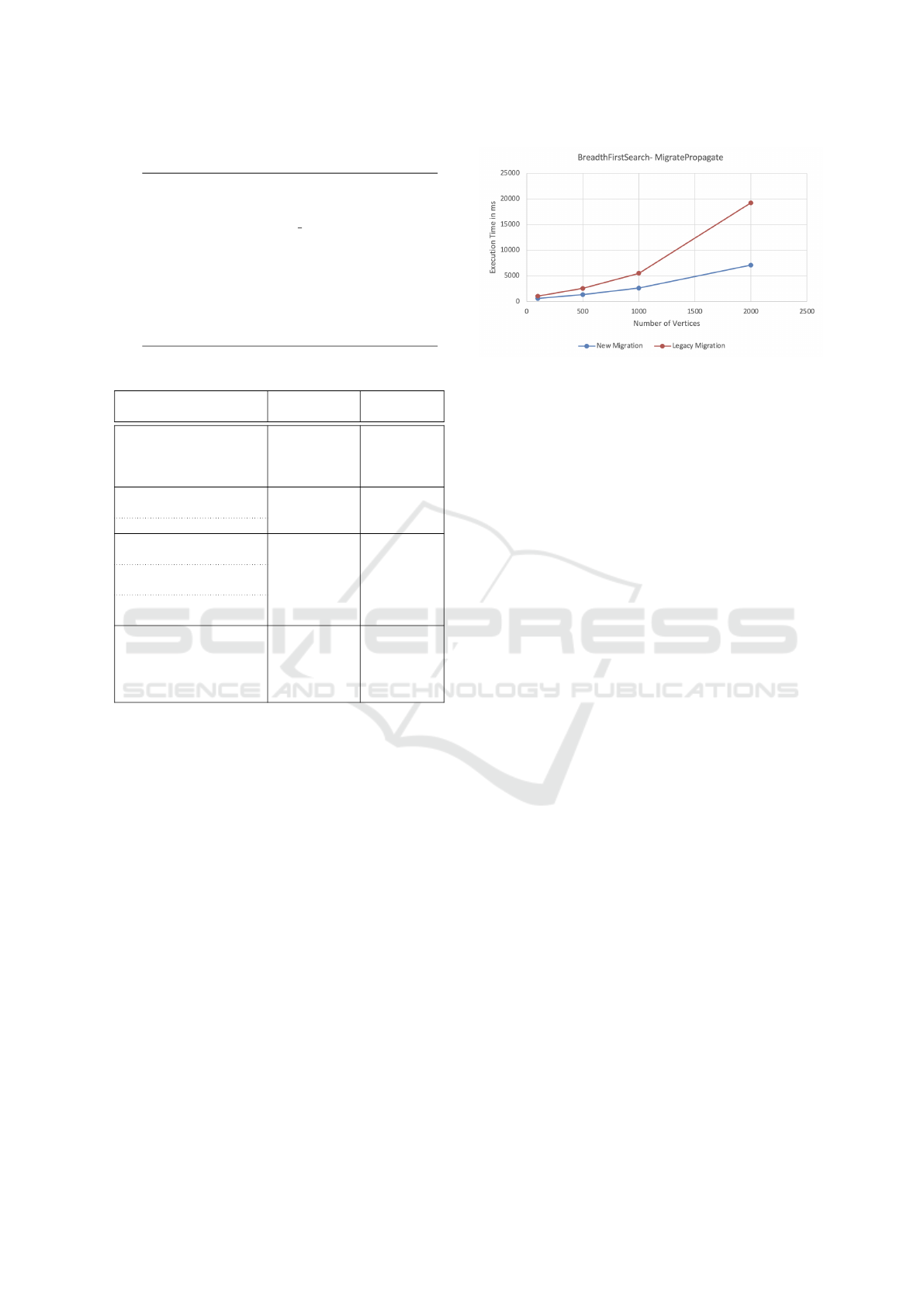
Figure 6: Performance of breadth first search.
migration. We then coded the same benchmark pro-
grams with Repast Simphony, which allowed us to
compare MASS and Repast Simphony in their pro-
grammability.
4.1 Execution Performance
Figures 6 through to 10 demonstrate how the new
MASS version brings performance impacts onto BFS,
triangle counting, k-d tree construction followed by
range search, and CPP. Below we analyze parallel per-
formance of each benchmark program.
4.1.1 BFS
As shown in Figure 6, the execution time for mi-
gratePropagate() is lower than that taken by the
legacy migration. Their performance difference di-
verges as the number of vertices in a graph gets in-
creased. The performance improvement is primarily
due to the usage of the new manageAll() that spawns
and moves child agents as a part of a single execution.
The more graph vertices there are, the more agents
need to be spawned for migration, which is efficiently
supported by the new manageAll().
4.1.2 Triangle Counting
Figure 7 demonstrates the performance improvements
by migratePropagateDownStream() and migrateO-
riginalSource(). Since these two automated functions
are rather restrictive to spawning agents than explo-
sive migratePropagate(), they did not reduce execu-
tion time so drastically.
4.1.3 K-D Tree Construction and Range Search
The legacy MASS is not scalable enough to construct
a k-d tree covering 100K or more data points. On the
other hand, as mentioned in Section 3.2.2, the new
MASS increased the tree construction scalability so
as to handle beyond 100K data points. Figure 8 shows
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
368
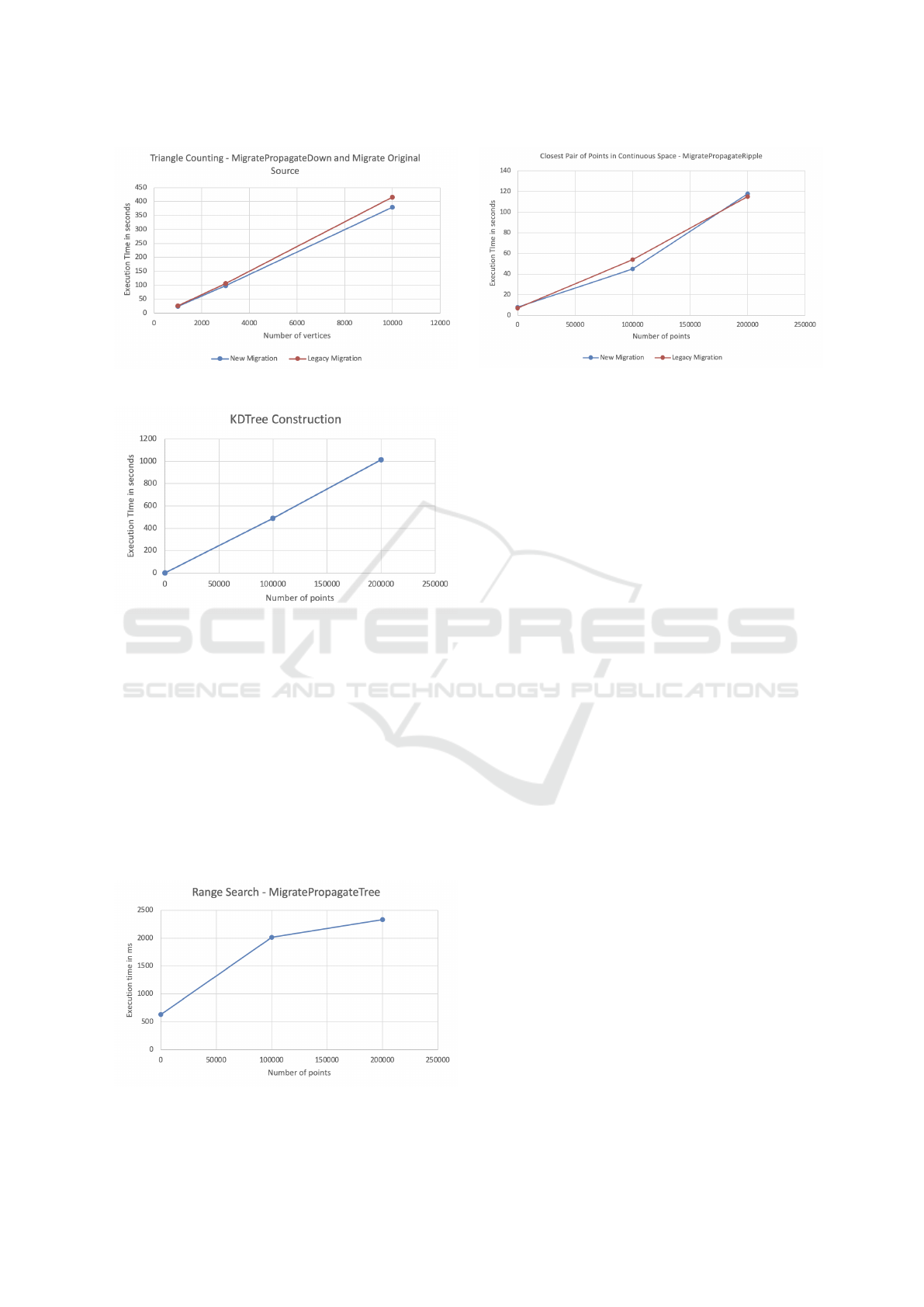
Figure 7: Performance of triangle counting.
Figure 8: Performance of k-d tree construction.
almost a linear increase of tree-construction time
with the new MASS version. Using migratePropa-
gateTree(), the new MASS clearly demonstrates the
O(nlog n) performance of range search from 100 to
200K data points (see Figure 9).
4.1.4 CPP
Figure 10 compares the legacy and new MASS ver-
sions for their CPP execution performance. Both ver-
sions show little difference in their execution time.
This is because a ripple propagation does not in-
Figure 9: Performance of range search.
Figure 10: Performance of closets pair of points.
crease agent population so drastically as observed in
BFS. Furthermore, the more data points there are, the
higher the chances an agent encounters the nearest
data point within less simulation cycles.
In summary, the automated agent migration
mainly improves the execution performance and spa-
tial scalability of graph propagation and tree traverse
by agents.
4.2 Programmability Evaluation
Tables 2, 3, and 4 respectively compare the pro-
grammability between legacy and new MASS ver-
sions, between new MASS and Repast Simphony, and
across ABM libraries.
4.2.1 Improvements Within MASS
We counted each benchmark program’s lines of code
(LoC) by removing all blanks and comments from the
source code. Then, we measured how much reduction
was made for each benchmark program from legacy
to new MASS versions. Table 2 shows that BFS and
triangle counting achieved the highest percentage of
lines removed (83% and 60% respectively) while CPP
had the lowest reduction, (i.e., 22%). This is be-
cause migratePropagate(), migratePropagateDown-
Stream(), and migrateOriginalSource() were able to
fully abstract the agent navigation and propagation
from BFS and triangle-counting logic.
While CPP utilized the SpaceAgent class that au-
tomated propagation to the von Neumann or Moore
neighborhood, it still needed user-level logic to re-
move redundant agents that were duplicated from the
previous ripple propagation. For instance, agents dis-
patched from west to east and from south to north may
collide each other at the same coordinates, in which
case one of them must be removed. At present, these
redundancy check and agent removal operations are
not supported by the new migration functions.
Automated Agent Migration over Distributed Data Structures
369
Table 2: LoC reduction with automated agent migration.
Methods Applications LoC
Reduction
MigratePropagate BFS 83%
MigratePropagateDownStream
Triangle Counting 60%
MigrateOriginalSource
MigratePropagateTree (BothBranch)
Range Search 44%
MigratePropagateTree (LeftBranch)
MigratePropagateTree (RightBranch)
MigratePropagateRipple CPP 22%
4.2.2 MASS vs Repast Simphony
New MASS no longer requires benchmark programs
to write fine-grain instructions to support automatic
agent migration, tree traversal, and 2D propagation.
Instead, they are built upon these new features. On the
other hand, for Repast Simphony, we had to develop
the AgentManager class from scratch as it was essen-
tial to all its benchmark programs but was not read-
ily available. As the name suggests, AgentManager
is responsible for basic agent-management operations
including agent creation, termination, and migration
control. Implementing the same auto-navigation as
MASS Java in Repast Simphony for each benchmark
program requires slight modifications to this base
code.
To evaluate the programmability of these applica-
tions, LoC is a measure used to identify how much
programming must be done to implement an applica-
tion. Cyclomatic complexity is another metric used to
determine the complexity of a program based on the
number of logical paths in it. The LoC and Cyclo-
matic complexity are good metrics to explain better
how much complex code one needs to develop for an
application. Agent LoC represents LoC used to define
the patterns of agent behavior and their tasks. Space
LoC is code used to define the space within which the
problem is distributed and built on.
As detailed in Table 3, the overall LoC in Repast
is higher than MASS, (i.e., 1545 versus 1056 in total)
because of the need for code defining the structural
elements. Agent LoC is higher in Repast, (i.e., 553
versus 274) because of the mandatory use of Agent-
Manager, much of which contributed to the Agent
LoC. An agent reacts to a change in its environment.
Hence, Space LoC is higher, too in Repast, (i.e.,
378 versus 186) because this section is used to de-
velop the space and acts as a point of invocation of
method calls to AgentManager. This process is sim-
ple yet seeks fine-grained instructions, as mentioned
above. By choice of design, CPP in MASS used an
additional class, taking advantage of the strengths of
object-oriented programming in storing the CPP re-
Table 3: Quantitative Programmability Comparison be-
tween MASS and Repast Simphony.
Measures
Libraries BFS
Tri
Count
Range
Search
CPP
LoC
MASS 79 175 400 362
Repast 432 260 539 314
Cyclomatic
MASS 2.25 3.875 3.944 3.1
complexity
Repast 1.785 2.45 2.6 2.31
Agent LoC
MASS 17 40 122 95
(A)
Repast 229 76 139 109
Space LoC
MASS 19 37 120 10
(S)
Repast 111 94 130 43
Model Mgmt
MASS 43 98 158 257
LoC - (A + S)
Repast 92 90 270 162
sults; unlike in Repast, a simple array of points was
used. Repast’s CPP saw reduced code (i.e., 314 ver-
sus 362) because of the simplified approach to record-
ing the results. The Cyclomatic complexity in MASS
is increased through iterations and conditionals. It
ranges from 2.25 to 3.944 as compared to Repast’s
Cyclomatic complexity in 1.785 through to 2.6. The
decision-making process contributes to this by call-
ing the appropriate agent migration methods followed
by other utility methods. The repeated use of condi-
tionals can be closely associated with MASS’ object-
oriented approach and switch statements in calling ap-
propriate base methods. Lastly, in BFS with Repast,
the modified AgentManager increased Agent LoC.
Space LoC was majorly increased because, unlike
other implementations, the generation of vertices and
their neighbors was in-built into the application.
4.2.3 Availability of Automated Agent Migration
Across Products
We also compared the availability of automated agent
migration methods with Netlogo and Repast Sim-
phony. As summarized in Table 4, with the introduc-
tion of the new automated agent navigation, MASS
now has the greatest number of advanced agent mi-
gration methods. Repast Simphony supports cer-
tain agent navigational methods such as Shortestpath,
MoveAgentByDisplacement and MoveAgentbyVec-
tor that are currently not supported in MASS. How-
ever, SmartAgent in MASS can be easily extended to
incorporate these agent navigational patterns.
Based on our evaluation in this section, we can
conclude that the new automated agent migration
along with the improvements in the agent/spatial
management has brought significant performance im-
provements to MASS while executing the benchmark
programs. The new automated agent migration has
also made MASS easier to use and has improved
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
370

Table 4: Availability of automated agent migration across
products.
Methods
NetLogo Repast MASS
MigratePropagate
No Yes
1
Yes
MigratePropagateDownStream
No No Yes
MigrateOriginalSource
No No Yes
MigratePropagateTree
No Yes Yes
MigratePropagateRipple
Yes
2
(Yes)
3
Yes
MigrateMin
No No Yes
MigrateMax
No No Yes
MigrateRandom
No No Yes
ShortestPath
No Yes No
MoveAgentByDisplacement
No Yes No
MoveAgentByVector
No Yes No
1
Repast Simphony can perform breadth first search.
2
NetLogo supports Voronoi diagram and K-Nearest Neighbor.
3
Repast Simphony can check if an agent is present in the von Neumann or
Moore neighborhood.
the programmability when compared to Repast Sim-
phony and Netlogo.
5 CONCLUSIONS
Focusing on agent-based graph computing and com-
putational geometry, we found common agent mi-
gration patterns from several benchmark programs
and formulated them as high-level migration func-
tions. Using these migration functions, we re-coded
the same MASS benchmark programs. Our perfor-
mance and programmability measurements demon-
strated that the automated agent migration not only
accelerated the execution but also improved the pro-
grammability as compared to Repast Simphony.
To further extend the work we have completed, we
see the following three opportunities. The first plan
intends to introduce additional agent navigation func-
tions including:
• PropagateRippleWithBouncing: to support the
calculation of Euclidean shortest path between
two points over contiguous space by propagating
a ripple from the source point and bouncing off
opaque obstacles until the ripple detects the desti-
nation point.
• MigrateLowestCoordinatePoint and MigrateUn-
boundedRegion: to construct a convex hull by
moving an agent to the starting coordinate point
and thereafter by walking the agent to the Voronoi
site present in the unbounded Voronoi region.
• MoveAgentByDisplacement and MoveAgent-
ByVector: to move an agent from its current
location by a given distance over a continuous
space or to move an agent by the distance along a
specified angle.
Our second plan is to evaluate MigrateMin,
MigrateMax, and MigrateRandom with additional
benchmark programs such as Dijkstra’s algorithm. Fi-
nally, our third plan is re-implementations of more
benchmark programs including Voronoi diagram and
convex hulls in MASS, using the automated agent
navigation methods.
REFERENCES
Blashaw, D. and Fukuda, M. (2022). An Interactive En-
vironment to Support Agent-based Graph Program-
ming. In Proc. of the 14th International Conference
on Agents and Artificial Intelligence - Volume 1, pages
148–155.
Blum, C. (2005). Ant colony optimization: introduction and
recent trends. Physics of Life Reviews, 2(4):353–373.
Collier, N. and North, M. (2013). Parallel agent-based sim-
ulation with Repast for High Performance Computing.
Simulation, 89(10):1215–1235.
Fukuda, M., Gordon, C., Mert, U., and Sell, M. (2020).
Agent-Based Computational Framework for Dis-
tributed Analysis. IEEE Computer, 53(3):16–25.
Gilroy, J., Paronyan, S., Acoltz, J., and Fukuda, M. (2020).
Agent-Navigable Dynamic Graph Construction and
Visualization over Distributed Memory. In 7th Int’l
Workshop on BigGraphs’20, pages 2957–2966. IEEE.
Gordon, C., Mert, U., Sell, M., and Fukuda, M. (2019).
Implementation techniques to parallelize agent-based
graph analysis. In Int’l Workshops of PAAMS 2019,
Highlights of Practical Applications of Survivable
Agents and Multi-Agent Systems, pages 3–14, Avila,
Spain.
Holcombe, M., Coakley, S., and Smallwood, R. (2006).
A General Framework for Agent-based Modelling of
Complex Systems. In European Conference on Com-
plex Systems 2006 - ECCS’06, pages 83–88, Oxford,
UK.
Hong, Y. and Fukuda, M. (2022). Pipelining Graph Con-
struction and Agent-based Computation over Dis-
tributed Memory. In 9th Int’l Workshop on Big-
Graphs’22, page to appear. IEEE.
NetLogo Models (1999). Accessed on:
November 20, 2022. [Online]. Available:
https://ccl.northwestern.edu/netlogo/models/.
North, M. J., Tatara, E., Collier, N., and Ozik, J. (2007).
Visual Agent-based Model Development with Repast
Simphony. In Agent 2007 Conference on Complex In-
teraction and Social Emergence, Chicago, IL.
Automated Agent Migration over Distributed Data Structures
371
