
Using a 1D Pose-Descriptor on the Finger-Level to Reduce the
Dimensions in Hand Posture Estimation
Amin Dadgar and Guido Brunnett
Computer Science, Chemnitz University of Technology, Straße der Nationen 62, 09111, Chemnitz, Germany
Keywords:
One-D Finger Pose-Descriptor, Distance-Based Descriptor, Anatomy-Based Dimensionality Reduction,
Temporal a-Priori, Hand Posture Estimation, Single RGB Camera, Virtual Hand Models, Computer Vision.
Abstract:
We claim there is a simple measure to characterize all postures of every finger in human hands, each with
a single and unique value. To that, we illustrate the sum of distances of fingers’ (movable) joints/nodes (or
of the finger’s tip) to a locally fixed reference point on that hand (e.g., wrist joint) equals a unique value for
each finger’s posture. We support our hypothesis by presenting numerical justification based on the kinematic
skeleton of a human hand for four fingers and by providing evidence on two virtual hand models (which
closely resemble the structure of human hands) for thumbs. The employment of this descriptor reduces the
dimensionality of the finger’s space from 16 to 5 (e.g., one degree of freedom for each finger). To demonstrate
the advantages of employing this measure for finger pose estimation, we utilize it as a temporal a-priori in the
analysis-by-synthesis framework to constrain the posture space in searching and estimating the optimum pose
of fingers more efficiently. In a set of experiments, we show the benefits of employing this descriptor in time
complexity, latency, and accuracy of the pose estimation of our virtual hand.
1 INTRODUCTION
Three-D hand pose estimation systems aim at detect-
ing the joint configuration of human hands in 3D
space. These systems are essential requirements for
disciplines such as human behavior understanding,
human-computer interaction, and augmented reality.
However, the high degrees of freedom of fingers (16
out of total 28 DoF of hands) is cumbersome for a
fast and/or accurate performance. Therefore, it is ad-
vantageous to discover the feasibility of reducing this
high dimensionality by exploiting the hands’ inherent
kinematic/anatomic properties.
The main idea of our work is to investigate
whether a finger pose could be uniquely described
as a distance between the keypoints on fingers and a
locally fixed reference point on the hands (e.g., the
wrist joint, palm center, etc.). Such a relation would
simplify the representation of the fingers’ postures to
merely five numbers and thus drastically reduce the
dimensionality of the problem.
Similar approaches have been suggested in two-
D (Liao et al., 2012) though the authors failed to
generalize them to three-D. There were endeavors on
three-D (Shimizume et al., 2019) but their generaliza-
tions to all postures and orientations remained chal-
lenging. Thus in those works, simplifying the prob-
lem, by modeling the camera-hand distance, assum-
ing stretched outward fingers, and strictly fixating the
hand orientation, seems to the expected trend.
In our investigation, by employing two artificial
hand models, we were able to observe two different
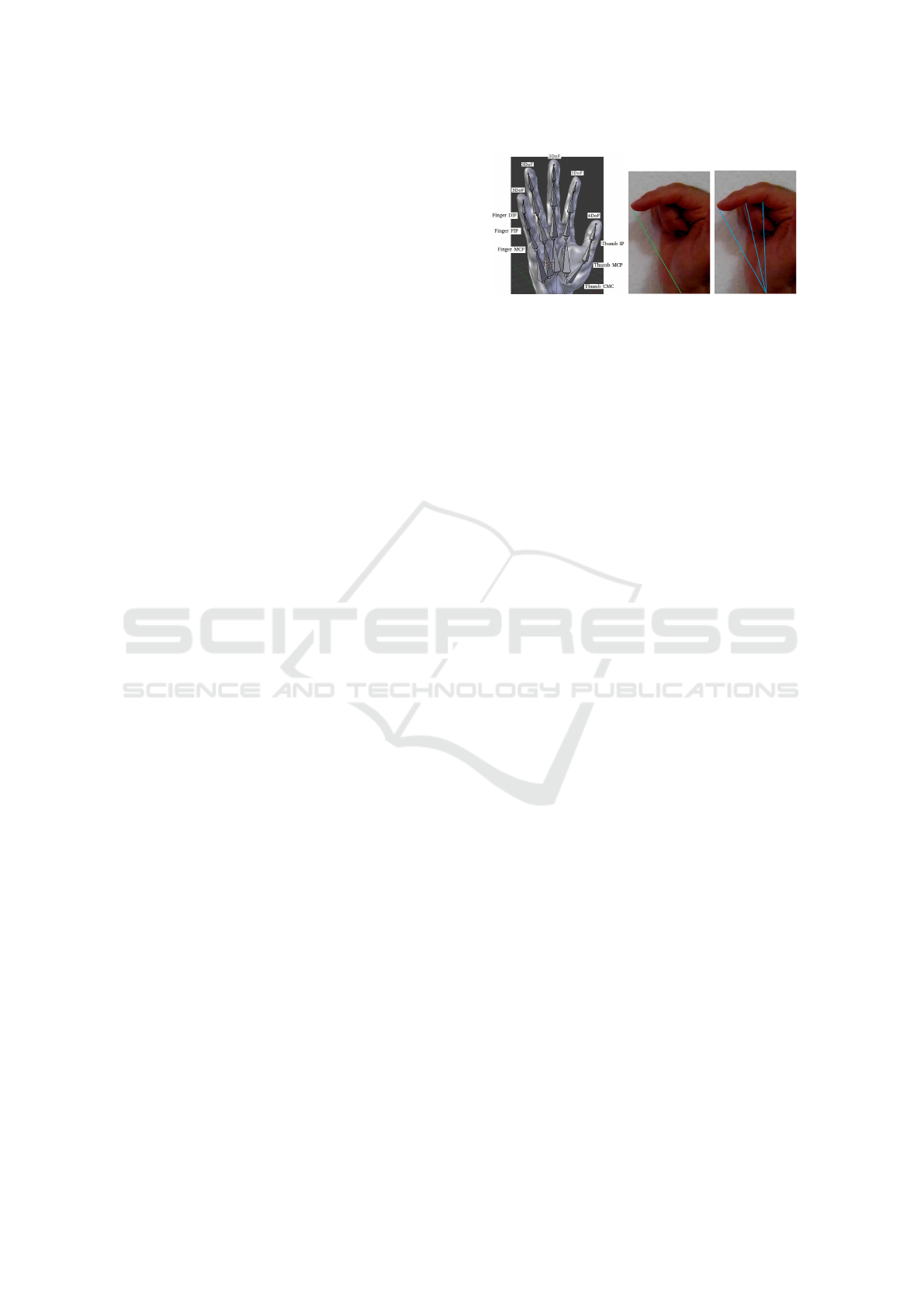
yet highly related pose-descriptors (Eq1, 2). First,
the distance of the fingers or thumb’s tip to a refer-
ence point (wrist) is always a unique value for differ-
ent poses, Fig1-middle. Second, the sum of distances
of fingers/thumb (movable) joints/nodes to that refer-
ence point is also a unique value, Fig1-right.
After validating the uniqueness of the pose-
descriptors for both models, we extended our investi-
gation to justify our findings based on the kinematic
relations of the human hand. In the Section 3, we
numerically justify, given a range of the allowable ro-
tation for joints, if one merely selects the place of the
reference point carefully, the uniqueness of these dis-
tances will be maintained. We label the suitable spot
of reference points in Fig3 as Re f
J
.
In brief, we require the following components
to compute and assess the uniqueness of our pose-
descriptors: A) Positions of moving nodes of fingers
(e.g., two inter-phalangeal joins and the tip), and the
thumb’s (i.e., two phalangeal joints and the tip) as
Dadgar, A. and Brunnett, G.
Using a 1D Pose-Descriptor on the Finger-Level to Reduce the Dimensions in Hand Posture Estimation.
DOI: 10.5220/0011781000003411
In Proceedings of the 12th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2023), pages 501-508
ISBN: 978-989-758-626-2; ISSN: 2184-4313
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
501
seen in Fig1-top. B) Appropriate reference point that
always remains locally static with respect to fingers
(e.g., the wrist joint). C) Plausible rotation range of
each movable node. This descriptor is independent
of camera distance to the hands, hand orientation (or
camera view-point), and fingers pose.
We employ this pose-descriptor to reduce the high
degrees of freedom of fingers to five (one-D for each
finger). Additionally, we will incorporate this as a-
priori in five one-D temporal models (one model for
each finger) and achieve a real-time estimation of the
finger poses of a virtual hand in the costly synthesis-
by-analysis framework on CPUs.
2 LITERATURE REVIEW
For accurate and real-time estimation of the hand’s
three-D postures, researchers consider a wide range
of approaches (Zhang et al., 2020; Zhao et al., 2013).
To review the fore works regarding global relation-
ships between the fingers and a point on the hands,
however, we focus on a specific type of posture es-
timation that detects fingertips position. As one of
the earliest works in finding some global features on
fingers, (Hardenberg, 2001) demonstrated a circular-
diametric relationship between the fingers on two-D.
Then he tried to find the fingertip’s position based on
those relationships.
There are several distance-based approaches to
detecting fingertips in two-D. The work by (Dung and
Mizukawa, 2010) suggested a distance-based method
in connected component labeling (Paralic, 2012) fash-
ion to extract the two-D fingertips, hand region, and
palm center on images. However, their approach
works only if the fingers are wide open. A more
advanced strategy proposed by (Liao et al., 2012)
addresses more challenging hand postures such as
closed-fingers poses. They employed distance trans-
formation to filter fingers and remain with merely the
palm area. However, they used a simplified two-D
hand model with strongly local geometric constraints.
These approaches have two main drawbacks that
are intrinsic to their two-D characteristics. First, they
rely on local properties that are assumed will remain
unchanged. However, these two-D properties inher-
ently are against the innate three-D global invariabil-
ity (unless the hand faces forward, with a specified
distance to the camera and a fixed orientation). Sec-
ond, their extensions to other scenarios and applica-
tions are not straightforward.
To alleviate the problems above, several three-D
distance-based approaches were proposed. For in-
stance, amid the depth sensors’ era, (Raheja et al.,
Figure 1: Left: CMC carpal-metacarpal joint, MCP
metacarpal- phalangeal joint, PIP proximal inter-phalangeal
joint, DIP distal interphalangeal joint, IP inter-phalangeal
joint. Both of these values, Middle: the distance of fingers’
tip to a local reference point (e.g., wrist joint) and Right:
The sum of the distances of 3 movable fingers’ nodes, on a
hand gives us a unique value for each finger posture.
2011) proposed a method for fingertips and centers
of palms detection using KINECT. However, they as-
sumed that fingertips are closer to the camera than the
other hand’s parts, which imposes brute constraints on
the orientation of hands.
By incorporating monocular sensors and propos-
ing a novel finger constraint, (Yamamoto et al., 2012;
Shimizume et al., 2019) estimated hand postures us-
ing detected fingertip positions with inverse kinemat-
ics (IK). However, there is a major issue in their ap-
proach. In IK, there are relations from fingertips to
the joints’ configuration (not the reverse). Therefore,
in practice, one can not meaningfully reduce the high
complexity (or DoF) of fingers. For example, an effi-
cient temporal model can not be introduced on the IK.
Thus the system has to estimate hand postures from
fingertip positions by solving IK for a high DoF prob-
lem. That novel constraint was employed to identify
the touch state of the fingers’ tips. However, the ex-
tension of the approach for every posture of the hand
seems infeasible.
To the best of our knowledge, we propose a novel
distance-based measure to describe the poses of each
finger. Our descriptor is in three-D and is view-point
and camera-distance independent. Therefore, it can
assist one in designing finger pose estimation systems
with merely five DoF.
3 METHODOLOGY
Our pose-descriptor for each finer is a one-
dimensional number that characterizes the postures of
that finger. To compute this descriptor we require the
distance of fingertips (and movable finger joints) to a
locally fixed point on the hands (e.g., the wrist joint).
In this section, we demonstrate how we calculate this
descriptor and justify its uniqueness within plausible
ranges of fingers kinematics (degrees). Additionally,
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
502

Figure 2: The sorted pose-descriptor Type
1
(Eq1) and
Type
2
(Eq2), for middle finger & thumb. The four fin-
gers have the same number of DoF and a similar descriptor
pattern. We illustrate the Mid-Res database consisting of
≈1400 poses for the finger and 3600 poses for the thumb.
we show how to incorporate it in a temporal model
as a-priori and design a search engine to estimate the
poses of a virtual hand in real-time.
Calculation of a Novel Pose-Descriptor. The basis
of our calculations is a data structure that comprises
the positions of all finger joints and tips. Considering
21 joints in hands, we define 7 limbs Lt, Rn, Md, Id,
T h, Wr, and Fr which stand for little, ring, middle,
index, thumb, wrist, and forearm, respectively. Ad-
ditionally, each finger has a tip t node and u, m, l, p
joints which stand for upper, middle, lower, and palm
(note the thumb has no middle joint).
By choosing the wrist as the Re f point, the finger-
tips distances to the wrist are calculated as follows,
and call it the pose-descriptor Type
1
:
Descriptor
1
(Fin
i
) =D(Tip(Fin
i
),W r)
where, Fin
i
={Lt,Rn,Md,Id,T h}
(1)
We also define the Type
2
descriptor as the sum of
the movable nodes’ distances to that Re f point.
Descriptor
2
(Fin
i
) =
∑
Node=t,u,m
D(Node(Fin
i
),W r)
where, Fin
i
={Lt,Rn,Md,Id}
Descriptor
2
(T h) =
∑
Node=t,u,l
D(Node(T h),W r)
(2)
In this equation, all fingers have the joint’s indexes of
t, u, m, and the thumb joint’s indexes are t, u, l.
In our experiments, we investigate the advantages
of the second type of this pose-descriptor. However,
as the following paragraphs will clarify, both descrip-
tors are unique. Thus in some applications, where the
position of other joints is not known, the first type
would work just as fine.
Pose-Descriptor Uniqueness: Justification & Evi-
dence. To employ this metric as a pose-descriptor,
we justify it has a unique value for each finger’s most
(or ideally all) poses for an excessively large num-
ber of finger posture set (e.g., high-resolution pose
database). To simplify the investigation, as seen in
Fig3, we begin with the hand kinematics for pose-
descriptor Type
2
. Also, we initially consider the dis-
tance of the fingers moving nodes to the palm joint of
each finger, PalmJ (not the wrist joint), to eliminate
the calculations on the Y -axis (using Eq3). Next, we
set the ranges for the finger joints’ angles. For the
four angles of the fingers, θ
1
, θ
2
, θ
3
, and θ
4
we ob-
serve the ranges of [0
◦
, 0
◦
] (e.g., L
1
is a fixed part),
[0
◦
, 90
◦
], [0
◦
, 120
◦
], and [0
◦
, 45
◦
], respectively.
Z =Z
T
+ Z
U
+ Z
M
= (z
1
+ z
2
+ z
3
+ z
4
)+
(z
1
+ z
2
+ z
3
) + (z
1
+ z
2
) = 3z
1
+ 3z
2
+ 2z
3
+ z
4
=3L
1
cos(θ
1
) + 3L
2
cos(θ
2
) + 2L
3
cos(θ
3
) + L
4
cos(θ
4
)
X =X
T
+ X
U
+ X
M
= (x
1
+ x
2
+ x
3
+ x
4
)+
(x
1
+ x
2
+ x
3
) + (x
1
+ x
2
) = 3x
1
+ 3x
2
+ 2x
3
+ x
4
=3L
1
sin(θ
1
) + 3L
2
sin(θ
2
) + 2L
3
sin(θ
3
) + L
4
sin(θ
4
)
(3)
Then considering T heta
i
s, we have a function on
the hyperspace in which we can form a parametric
line (with parameter t) that lies on the intersection of
this function and an arbitrary plane. Now, for every
value of t and T heta
i
, if the derivative of this line is
non-zero, we can conclude Eq3 is injective (See ap-
pendix for developing this derivative). To perform a
thorough numerical justification, we also investigate
the influence of the bones’ length and calculate the
derivative for different length values. To that, we nor-
malize L
i
s w.r.t L
2
(the lowest ‘moving’ limb on each
finger) and alter the values of others (L
i
> 0). Fi-
nally, we calculate this derivative for any two points
on the high-resolution database of 1-degree-step for
each joint (e.g. 486K poses).
In our investigations, the smallest value the deriva-
tive gets mostly is in the order of 10
−9
and rarely to
10
−16
. Considering the precision of python as 10
−28
,
we can conclude these smallest values are non-zero
(even with L
2
= L
3
= L
4
= 1 only if L
1
̸= L
2
). Thus,
Eq3 is unique for all poses of fingers in our exces-
sively high-resolution database, and in the uniqueness
property of the descriptor, the fixed part’s length has
the most significant role. One can select PalmJ in a
spot where the condition of L
1
̸= L
2
satisfies.
The next step is to incorporate the Y -axis dis-
tance into the computation, and to show the pose-
descriptor stays unique if the reference point is
not on the z-axis of the fingers. As demon-
strated in Fig3-right, Y
2
T
= Z
2
T
+ConstY
2
, Y
2
U
= Z
2
U
+ConstY
2
,
and Y
2
M
= Z
2
M
+ConstY
2
. Therefore, the total distance on Y-
axis is Y
2
= Z
2
T
+ Z
2
U
+ Z
2
M
+ 3 ×ConstY
2
. However, one term
of this equation is constant, and the Z terms are the
previously calculated Z-distance. Therefore, we con-
clude that our justification is extendable to an arbi-
trary Re f J on the Y -axis. The same conclusion is
derivable for Type
1
descriptor by conducting a sim-
ilar analysis. Because by a closer look at the Eq3,
Using a 1D Pose-Descriptor on the Finger-Level to Reduce the Dimensions in Hand Posture Estimation
503
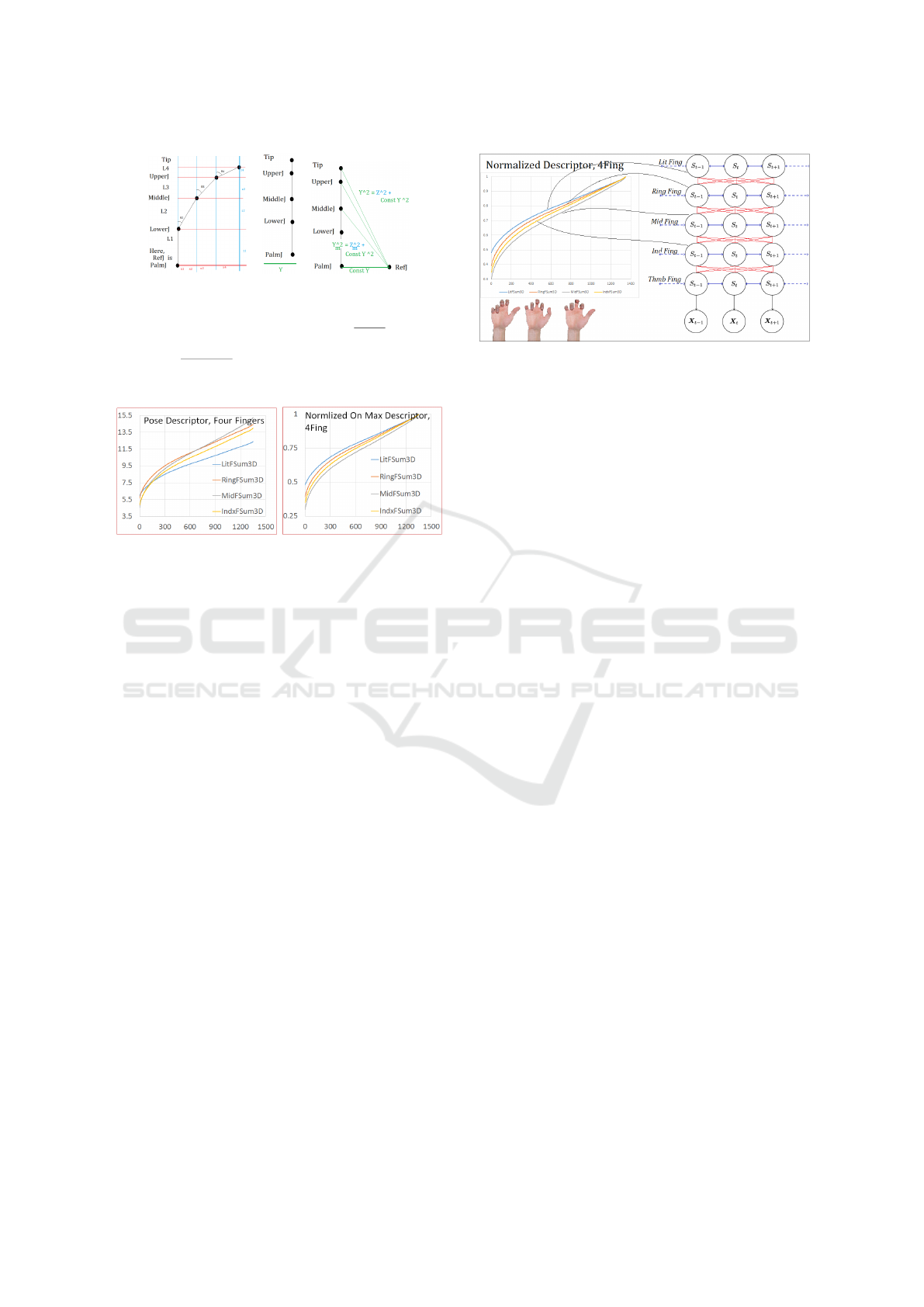
Figure 3: The kinematics formulation to calculate pose-
descriptor Type
2
: The left image shows the side view of
a finger, to find Z and X values. The middle image demon-
strates the case when Y = 0 and D
PalmJoint
=
2
p
X
2
+ Z
2
. The right
image illustrates that the incorporation of the Y-distance
(D
PalmJoint
=
2
p
X
2
+Y
2
+ Z
2
) into the formula for pose-descriptor
Type
2
and how no new variable enters the equation.
Figure 4: The actual and normalized pose-descriptor Type
2
values of four fingers. Thumb has a different number of
poses thus its visualization with other fingers is not possible.
Type
1
is a special case of Type
2
where the z
i
and x
i
(i ∈ {1, 2, 3, 4}) coefficients equal one.
Finally, we extend the uniqueness assessment to
the thumbs. Thumbs, similar to fingers, have three
moving nodes. However, unlike other fingers, there
is no inherent fixed part in the thumbs’ bone kine-
matics. Nevertheless, by defining the Re f J some-
where below its PalmJ, we can assume a fixed limb
for it. Therefore, a similar hierarchical structure of
fingers is imitable for thumbs. However, a more sig-
nificant discrepancy here is, fingers have three de-
grees of freedom while thumbs have four with en-
tirely distinct ranges of degrees ([−20, 90], [−10, 10],
[−30, 10], [−20, 20]) and complex motion’s structure.
Arguing a similar kinematic formulations for thumbs
(in the appendix) exceeds the limits for this paper.
Therefore to justify the uniqueness of thumbs, we
employ two synthetic hand models with appropriate
rigging and skinning. After using the defined pose
representation and setting the virtual camera parame-
ters, we compute the joints’ three-D position. Then,
we select a Low
Res
, Mid
Res
, and High
Res
database for
each joint (e.g., less than 10
◦
-step, more than < 10
◦
-
step, 4
◦
-step, respectively). These resolutions lead to
a database of 300+, 3400+, and > 32500 postures for
the thumb on one of the hand model (for the second
model, these numbers are slightly less as the degree
ranges for that model is different). Then, we calculate
the pose-descriptor Type
1
and Type
2
, as explained
Figure 5: Various poses of all five fingers can relate together
using five one-dimensional temporal model. Thumb has a
different number of poses thus with could not visualize it’s
sorted pose-descriptor with other fingers.
in the previous subsection, and sort the values. Simi-
lar to the fingers, we witness unique descriptor values
for all different resolutions of thumb postures for both
types of descriptors and on both models (See Fig2 for
Type
1
, and for Type
2
on the first model).
In real-life applications (and our experiments), the
number of considered poses is usually much smaller
than the considered ones. Therefore, those large pos-
ture sets provide a high level of confidence about the
uniqueness of our proposed descriptor.
One-D Temporal Model. Initially, we sought to il-
lustrate the advantages of the pose-descriptor in the
mere estimation of the finger poses (without consider-
ing the time complexity). Conducting a set of experi-
ments, we achieved accurate pose estimations for one
finger where the gradient descent utterly failed. How-
ever, the time complexity of the approach was high,
thus we altered the roadmap and considered real-time
performance as a crucial criterion in our evaluations.
To that, we utilize our descriptor in a one-D tem-
poral Markovian model. As seen in Fig4, the model
uses the previous and current states to estimate the
next state. The figure visualizes all four fingers’ one-
dimensional pose-descriptor. Thumb has a different
number of poses thus, simultaneous visualization of
its descriptor in that figure is not possible.
Hands, as high DoF objects, require high dimen-
sional (and complex) temporal model. However, with
our pose-descriptor we can employ five 1D models
to enhance the time-complexity considerably (Fig5).
If n is the number of states and h is the number of
searched fingers, the search algorithm will have O(n
h
)
complexity. In a mid-resolution pose database, with-
out the temporal model and considering merely the
generate-and-test search strategy (GAT ), n will be
1500(for four fingers) or 3500 (for thumbs). How-
ever, if we employ the temporal model, n will be 3,
which leads to considerable time improvements.
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
504

Figure 6: GAT
Dir
2st
(left) and GAT
Dir
1st
(right) to constraint
the temporal model of five fingers based on the previous
movement direction (open/closing) of fingers motion.
Further Improvement of Search Time. For find-
ing the optimal pose, our approach is to compare
the contours of the projected 3D model (into the 2D
plane, S) to the contour of the input image (I) using
Chamfer Distance (CD). However, CD is a costly pro-
cedure, because for each point on I, CD computes its
distance to all points in S to find the minimum (Eq4)
CD =
1
|I|
∑
i∈(0,I)
Min
s∈(0,S)
[d(I
i
, S
s
)]
(4)
However, our S and I are the ‘sorted’ (ordered)
contour points’ coordinates, so we can modify and
speed up the Chamfer computation (Eq5): By solely
calculating the distance around the neighborhood (nn)
of the previously found point. That reduces the time
complexity from O(n
2
) to O(h ∗n). For the first point
on I, we consider the entire points of S (initialization).
In our experiments, nn is usually 5.
CD =
1
|I|
∑
i∈(0,I)
Min
s∈(s−nn,s+nn)
[d(I
i
, S
s
)]
(5)
Real-Time Performance. Though these improve-
ments considerably enhanced the time complexity, the
performance is not real-time. Because in the tempo-
ral model, the GAT algorithm has O(n
h
) complexity
where, thanks to our one-D temporal model, n = 3.
That is, at each instance of time (S
t
), there are for-
ward, backward, and self transitions states each tem-
poral model could undergo (Fig5). By considering
five fingers, the overall complexity will amount to
n
h
= 3
5
= 243 poses to find the solution for one frame.
If we constrain them only to the left-to-right di-
rection (as in Fig6-left, for example), at S
t
, the tran-
sition can not go backward. So coming from S
t−1
, it
can either remain on S
t
or go forward. That is, there
are only two possible states each finger can under-
take (GAT
Dir
2st
), equating the total number of com-
plexity to n
h
= 2
5
= 48. A similar strategy exists for
Fig6-right. If merely forward transition is possible
(GAT
Dir
1st
), the number of poses the algorithm would
search equals to one: n
h
= 1
5
= 1.
Three Motion Patterns. With these considerations,
real-time estimation even on CPUs is feasible. Now,
we need application-specific scenarios to allow the
search, at each time step, to eliminate one or two
states (out of three possibilities). To that, we intro-
Figure 7: Three motion patterns of the little finger. We use
them to design application-dependent scenarios. These pat-
terns can also be very useful to analyze and model the time
series of fingers’ motion.
duce three motion patterns we observed in the fin-
gers/thumb which assist us designing our scenarios.
Four fingers have similar movement patterns but
have different ones compared to the thumbs. As
shown in Fig7 (using our Descriptor Type
1
for the lit-
tle finger), there are three possible paths the four fin-
gers can undertake to move between open and close
states. First, is freestyle motion, denoted as path
1
, in
which all the finger’s joints move together. Second,
hook-like motion (path
2
) in which, during the clos-
ing, the lowest joint of the fingers moves at the final
phase, but first, other joints close until their limits.
Third, pinch-like motion (path
3
), in which during the
closing, the lowest joint closes at first until its limit,
then the other joints close together.
For the thumb with upper, lower, and palm joints,
the path
1
is the freestyle, in which all the joints
close together. For the path
2
, (stretching motion), the
thumb initially approaches the index finger by mov-
ing the lower joint. Then by moving the palm joint,
the tip accosts the other fingers’ parent joint. Next, by
moving the upper joint, it closes the upper part, and
finally, it ends the motion by returning the palm joint
to its resting position. The path
3
, (wiping motion),
starts by moving its lower joint to approach the index
finger (similar to the second path). Then, it closes the
upper joint while being close to the index finger. Fi-
nally, it brings the lower joint to its resting position.
4 EXPERIMENT
We test the efficacy of our descriptor in finding the op-
timal solution in three experiments on a virtual hand
as input. We use the path
1
to design application-
specific scenarios with considerations from Table 1.
We employ four metrics to evaluate the perfor-
mance. First is the time complexity, indicated by fps.
Second is the initial and total latency caused by the
initialization or unexpected costs in the middle of the
estimation. Third is the average 3D Joint Position er-
Using a 1D Pose-Descriptor on the Finger-Level to Reduce the Dimensions in Hand Posture Estimation
505
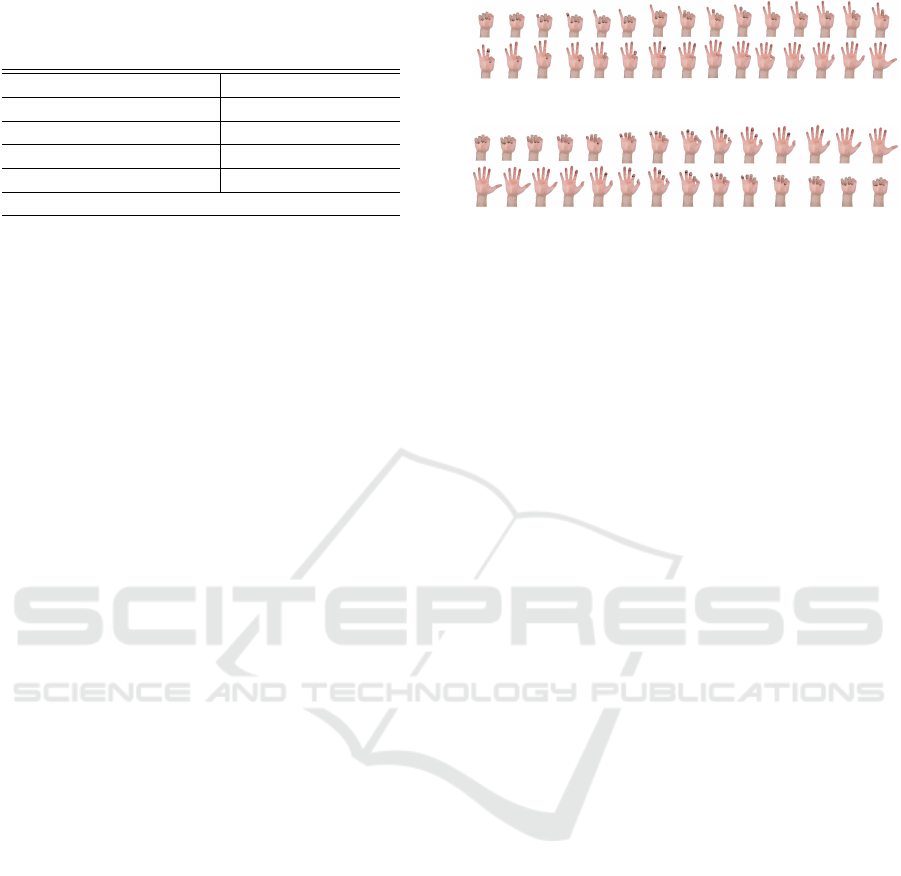
Table 1: Eleven Variables could be considered in designing
the scenarios that contain fingers’ motion.
Exp Variables
Do the fingers move A/Synchronously?
Do they move orderly: Adjacent/Apart? Is the order Right-to-Left?
If failed, do we Srch Adj Fings Only? Is fingers’ Motion Full-Cycle?
If not, do they Conserve their Direction? Is there Hand-lvl Open-Closing?
Do we consider Previous Direction? If yes, is it Initialized?
No. of Prtl-Cycled Finger’s Dynamics? 1, 2, or 3?
No. of End-Cycled Fing’s Dynamics? 1, 2, or 3?
ror (JPos3D) calculated as the normalized sum of esti-
mated joints distances from the ground truth. Last is
the Accuracy (Acc). We attend to highly constrained
cases. Therefore, we indicate the amount of accuracy
only if it is not 100%. The search algorithm knows
the previous state of fingers in the sequence.
To animate the fingers, we employ a similar hi-
erarchical hand database as proposed by (Dadgar
and Brunnett, 2018). They Define their hierarchical
database on various layers of complexity. That en-
ables us to animate hand limbs individually with a
specific emphasize on the layer of interest (e.g., fin-
gers). Its finger’s layer (e.g., L
4
) is further parti-
tionable into five sublayers (one for each finger) with
modifiable step degree (e.g., resolution). These prop-
erties makes the database a suitable choice to exam-
ine the uniqueness of our pose-descriptor on different
resolutions, refine it with different paths, and consider
various variables to design specific scenarios.
We create a sequence of postures for each
finger based on the temporal evolution of each
finger specified for every experiment using a
Viterbi-like algorithm (Viterbi, 1967). Re-
turning S = {S
n
|n = 1,2, 3, 4, 5} sequences (where
1 ≡ Little, 2 ≡ Ring,3 ≡ Middle, 4 ≡ Index, 5 ≡ T humb) of
Q = {q
1
, q
2
, ..., q
m
} states, where m ≈ 2000 is a usual
practice in this work. After selecting a specific global
orientation, we retrieve the input sequences. Finally,
the OpenCV’s contour extraction method (Bradski,
2000) is applied to the input frames to extract the
contours when searching for the optimal posture. All
experiments employ the previous direction for the
search. An elaborated version of the definitions and
their evaluations are in the following subsections:
Experiment1. In this experiment, we consider all dif-
ferent digit combinations of fingers, including their
transitions (see Fig8). The fingers start at closed-pose,
and one by one (thus asynchronously), from the lit-
tle finger, each of them opens and stays in the open
pose (thus full-cycled on the finger level and having
hand-level cycles) until all fingers open from right to
left (therefore orderly or adjacent). After one-by-one
closing, the next opening cycle starts from the next
Figure 8: A sample of inputs for experiment one.
Figure 9: A sample of inputs for experiment two.
(e.g., ring) finger. For this scenario, considering the
path
1
where each finger has 21 possible poses from
close to open, we have 2100 poses. For the first frame,
we do not use the initialization (so the number of dy-
namics is 2
5
). Nevertheless, for the end poses, at
open or close cycles, the re-initialization information
is known (thus, the number of possible dynamics for
each finger is 1).
Experiment2. For this experiment, the collective free
motion of fingers from close-posture to open (and re-
verse) is under investigation (see Fig9). Here, other
fingers do not have to wait at their end states for one
finger to reach its closed or opened states (thus there is
no hand-level cycle). Identical to the previous exper-
iment, the hand starts in the closed pose and not one-
by-one (yet still asynchronously) opens from the little
finger. Each finger opens till the end (thus full-cycled)
until all fingers get opened from right to left (therefore
adjacent). Considering the 21 poses of path
1
, we have
1840 frames. Similarly, for the first frame we do not
employ the initialization (thus the number of dynam-
ics is 2
5
). For the end poses, at each cycles, also, the
re-initialization is known.
Experiment3. Here, we consider collective free mo-
tion (so there is no hand-level cycle) from close-
posture to open (and reverse). Analogous to the previ-
ous experiment, the hand starts in the closed pose and
asynchronously opens its fingers from the little one.
However, unlike in two other experiments, each finger
does not fully open until the end (thus partial-cycled)
until all fingers reach their end-pose from right to left
(therefore adjacent). For this scenario, considering
the path
1
, we have 2230 poses. We do not use the
initialization for the first frame. However, the number
of dynamics for that initial frame is 3
5
since the mo-
tion starts not at the beginning of the cycle. Here, for
the end cycles, at open or close postures, the initial-
ization information is available (thus, the number of
possible dynamics for each finger is 1).
Evaluation. Using our pose-descriptor in the one-D
temporal model enables us to achieve a real-time esti-
mation, as shown in Table 2. In all experiments, aver-
age output frame rates are above 31 fps. These output
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
506

Table 2: The results of our three experiments indicate that
our pose-descriptor can assist one to estimate the poses of
all five fingers in real-time. The latency of the search is also
within toleration if the frame rate of the input video is less
than or equal to 31.
Exp Descriptor Type
1
Descriptor Type
2
I
f ps
O
f ps
L
Int
L
Ttl
O
f ps
L
Int
L
Ttl
1 25 32.5 62 142 32.5 50 156
2 25 32.4 52 173 31.1 44 302
3 24 31 440 515 32 294 359
1 32 32.5 632 1825 32.5 857 1791
2 31 32.4 237 971 31.1 1130 1734
3 31 31 2194 2202 32 1208 1474
frame rates are suitable to estimate the poses when
the input videos have an fps of 25 or lower. There-
fore, we can conclude our pose-descriptor provides
an appropriate tool for real-time applications. The
initialization of the first frame is the primary cause
of the increase in the total latency (L
Ttl
). The latency
increases slightly during the rest of ≈ 2000 frames.
That is usually the result of cost variations in contour
extraction and Chamfer comparison caused by the al-
terable shape of the hand. However, because of much
higher average output frame rates (compared to input
fps), such increases in latency have marginal effects
on the overall performance. The third experiment has
a worse initial latency (L
Init
). For, the third experi-
ment’s motions do not start at the full-cycled of close-
postures. At those partial-cycled poses, there are three
(previous, current, and the next) states for each finger
to search (3
5
= 243). Whereas at full-cycled postures,
there are solely two states (current and next). That
leads to 2
5
= 32 searches, and results in experiments
one and two have better latency.
In rows four, five, and six of the table, we eval-
uate these experiments, this time with a higher input
frame rate. As expected, the average output frame
rates of the searches remain unchanged compared to
the first set of experiments. However, the latency is
different, and that affects the performance. Though
the L
Init
is worse, it is L
Ttl
that experiences the highest
diminution and affects the performance by large mar-
gins. When we increase the frame rates of the input
video, the search algorithm finds the correct answer
for each frame as before. However, a slight variation
in the shapes of the contours and, thus, the estima-
tion cost causes the search stays behind the video’s
current frames, and the L
Ttl
drastically worsens. The
primary purpose of the experiments was to demon-
strate the suitability of our descriptor in estimating
the finger poses in real-time applications, even when
merely CPU resources are available. The conclusion
section elaborates on the JPose3D and Acc metrics we
achieved during the experimentation.
5 CONCLUSION
We proposed a simple pose-descriptor that character-
izes the postures at finger level. We showed this de-
scriptor has unique values for different finger poses,
reducing the fingers’ DoF to 5 and eliminates the ne-
cessity of constraining the problem (as needed in re-
lated works). We incorporated this pose-descriptor
into a temporal model and with further modifications
could achieve real-time performance on CPUs. To
share more insights about the JPose3D and Acc, we
briefly touch on other conducted experiments using
the GAT paradigm, with various image scales and fin-
gers’ combinations.
To start systematically, we defined five categories
of finger combinations: Cat
1
means merely the little
finger is under the search. Cat
2
means solely the lit-
tle and the ring fingers are the subjects of estimation.
Cat
3
means we estimate the little, ring, and middle
fingers pose. Cat
4
means we search the poses of the
little, ring, middle, and index fingers. Finally, Cat
5
means we search all five fingers.
Beginning with GAT search and 100%-
scale, we achieved Acc = 100% and JPose3D = 0, on
Cat
1
. As we proceeded to Cat
5
, the results
shows a slight decrements on the accuracy:
Cat
2
(Acc = 100%,JPose3D = 0), Cat
3
(Acc ≈ 100%,JPose3D = 0.0003),
Cat
4
(Acc ≈ 96%,JPose3D = 0.001), Cat
5
(Acc ≈ 95%,JPos3D = 0.0008).
However, the low average f ps of the search was
a significant obstacle since we were aiming for
real-time results: Cat
1
(Out
f ps
= 1.23), Cat
2
(Out
f ps
= 0.41),
Cat
3
(Out
f ps
= 0.14), Cat
4
(Out
f ps
= 0.045), and Cat
5
(Out
f ps
= 0.015).
Continuing with the GAT search, we down
scaled the input and searched images. The low-
est scale which led to fast yet accurate (stable) re-
sults was the 10%-scale. For example, on Cat
1
with
that scale, we faced a slight decrease in accuracy
Cat
1
(Acc = 97%,JPose3D = 0.003). However, the average f ps
gain was considerable (Out
f ps
= 25). A similar pattern
was observable in all categories insofar that for Cat
5
,
we achieved the accuracy of Cat
5
(Acc ≈ 80%,JPose3D = 0.02)
and the average (Out
f ps
= 0.3). Though having an accept-
able accuracy, the time complexity for Cat
5
was still
far from being real-time. However, the enhanced time
complexity motivated us to modify the CD.
Proceeding to GAT
Dir
1st
search, we once consid-
ered various scales and coupled them with our mod-
ified Chamfer distance computation and reached the
time complexity as high as Cat
5
(Out
f ps
= 42) on 10%-
scale. However, without the scaling down, the aver-
age frame rate was around 32 for that specific experi-
ment (not much difference). Thus we did not include
scaling down the images in our experiment section to
avoid the plethora of information.
Using a 1D Pose-Descriptor on the Finger-Level to Reduce the Dimensions in Hand Posture Estimation
507

Applications. The applications of our pose-
descriptor can fork in several directions. First, as a
consequence of reducing the finger’s DoF, one could
build a new motion capture system with fewer sensors
(e.g., markers, haptics), wires, and circuitry. Second,
our descriptor assists in constructing a training set that
is as diverse as possible images in machine learning)
to let the nets generalize better. Finally, one can ben-
efit from our one-dimensional descriptor for studying
and modeling of sign languages. We touched on this
briefly and experienced the convenience of designing
synthetic sign gestures with our descriptor.
ACKNOWLEDGMENTS
This project was funded by the Deutsche Forschungs-
gemeinschaft CRC 1410 / project ID 416228727.
REFERENCES
Bradski, G. (2000). The OpenCV Lib. Dobb Sftwr Tl s Jrnl.
Dadgar, A. and Brunnett, G. (2018). Multi-Forest Classifi-
cation and Layered Exhaustive Search Using a Fully
Hierarchical Hand Posture / Gesture Database. In VIS-
APP, Funchal.
Dung, L. and Mizukawa, M. (2010). Fast fingertips posi-
tioning based on distance-based feature pixels. ICCE.
Hardenberg, C. V. (2001). Bare-Hand Human-Computer
Interaction.
Liao, Y., Zhou, Y., Zhou, H., and Liang, Z. (2012). Finger-
tips detection algorithm based on skin colour filtering
and distance transformation. Quality Sftwr Int Conf.
Paralic, M. (2012). Fast connected component labeling in
binary images. 35th Intern Conf on TSP.
Raheja, J. L., Chaudhary, A., and Singal, K. (2011). Track-
ing of fingertips and centers of palm using KINECT.
CIMSim, 3rd Intern Conf.
Shimizume, T., Umezawa, T., and Osawa, N. (2019). Esti-
mation of the Distance Between Fingertips Using Sil-
houette and Texture Information of Dorsal of Hand,
volume 11844 LNCS. Springer International.
Viterbi, A. (1967). Error bounds for convolutional codes
and an asymptotically optimum decoding algorithm.
IEEE Trans on Informtin Theory, 13(2):260–269.
Yamamoto, S., Funahashi, K., and Iwahori, Y. (2012). A
study for vision based data glove considering hidden
fingertip with self-occlusion. 13th Int Conf on Soft-
ware Eng, AI, Netwrk, & Parallel/Distrb Compt.
Zhang, F., Bazarevsky, V., Vakunov, A., Tkachenka, A.,
Sung, G., Chang, C.-L., and Grundmann, M. (2020).
MediaPipe Hands: On-device Real-time Hand Track-
ing.
Zhao, W., Zhang, J., Min, J., and Chai, J. (2013). Robust re-
altime physics-based motion control for human grasp-
ing. ACM Trans on Graphics, 32(6).
APPENDIX: UNIQUENESS
According to Fig3, we have z
1
= L
1
× cos(θ
1
),
z
2
= L
2
× cos(θ
2
), z
3
= L
3
× cos(θ
3
), z
4
= L
4
× cos(θ
4
),
x
1
= L
1
× sin(θ
1
), x
2
= L
2
× sin(θ
2
), x
3
= L
3
× sin(θ
3
),
x
4
= L
4
× sin(θ
4
). Therefore, descriptor Type
2
will be:
D
2
= F(θ
1
, θ
2
, θ
3
, θ
4
) = X
2
+ Z
2
= (x
1
+ x
2
+ x
3
+ x
4
)
2
+ (z
1
+ z
2
+ z
3
+ z
4
)
2
= L
2
1
sin
2
(θ
1
) + L
2
2
sin
2
(θ
2
) + L
2
3
sin
2
(θ
3
) + L
2
4
sin
2
(θ
4
)+
L
2
1
cos
2
(θ
1
) + L
2
2
cos
2
(θ
2
) + L
2
3
cos
2
(θ
3
) + L
2
4
cos
2
(θ
4
) + 2 × [
L
1
L
2
sin(θ
1
)sin(θ
2
) + L
1
L
3
sin(θ
1
)sin(θ
3
) + L
1
L
4
sin(θ
1
)sin(θ
4
)+
L
2
L
3
sin(θ
2
)sin(θ
3
) + L
2
L
4
sin(θ
2
)sin(θ
4
) + L
3
L
4
sin(θ
3
)sin(θ
4
)+
L
1
L
2
cos(θ
1
)cos(θ
2
) + L
1
L
3
cos(θ
1
)cos(θ
3
) + L
1
L
4
cos(θ
1
)cos(θ
4
)+
L
2
L
3
cos(θ
2
)cos(θ
3
) + L
2
L
4
cos(θ
2
)cos(θ
4
) + L
3
L
4
cos(θ
3
)cos(θ
4
)]
Using cos(x − y) = cosxcosy + sinxsiny and
considering θ
1
is always zero, we can simplify
the kinematic function F(θ
2
, θ
3
, θ
4
) as following:
F = L
2
1
+ L
2
2
+ L
2
3
+ L
2
4
+ 2 × [L
1
L
2
cos(θ
2
) + L
1
L
3
cos(θ
3
)+
L
1
L
4
cos(θ
4
) + L
2
L
3
cos(θ
3
− θ
2
) + L
2
L
4
cos(θ
4
− θ
2
) + L
3
L
4
cos(θ
4
− θ
3
)]
A Line Connecting Two Points. To show
that F(θ) is unique/injective in a given
interval (e.g., (θ
2
0
, θ
3
0
, θ
4
0
) ̸= (θ
2
1
, θ
3
1
, θ
4
1
)
with
F(θ
2
0
, θ
3
0
, θ
4
0
) ̸= F(θ
2
1
, θ
3
1
, θ
4
1
)), we connect these two
points with a line, and represent it in a vector form:
l (t) =
θ
2
0
, θ
3
0
, θ
4
0
+t
θ
2
1
− θ
2
0
, θ
3
1
− θ
3
0
, θ
4
1
− θ
4
0
, t ∈ ℜ
In terms of F(θ), this line has the following form:
F(t) =F
θ
2
0
+ (θ
2
1
− θ
2
0
)t, θ
3
0
+ (θ
3
1
− θ
3
0
)t, θ
4
0
+ (θ
4
1
− θ
4
0
)t
With the following components:
F
θ
2
(t) =L
2
1
+ L
2
2
+ L
2
3
+ L
2
4
+ 2 × L
1
L
2
cos(θ
2
0
+ (θ
2
1
− θ
2
0
)t)+
2 × L
2
L
3
cos(θ
3
0
− θ
2
0
+ (θ
3
1
− θ
2
1
)t − (θ
3
0
− θ
2
0
)t)+
2 × L
2
L
4
cos(θ
4
0
− θ
2
0
+ (θ
4
1
− θ
2
1
)t − (θ
4
0
− θ
2
0
)t)
F
θ
3
(t) =L
2
1
+ L
2
2
+ L
2
3
+ L
2
4
+ 2 × L
1
L
3
cos(θ
3
0
+ (θ
3
1
− θ
3
0
)t)+
2 × L
2
L
3
cos(θ
3
0
− θ
2
0
+ (θ
3
1
− θ
2
1
)t − (θ
3
0
− θ
2
0
)t)+
2 × L
3
L
4
cos(θ
4
0
− θ
3
0
+ (θ
4
1
− θ
3
1
)t − (θ
4
0
− θ
3
0
)t)
F
θ
4
(t) =L
2
1
+ L
2
2
+ L
2
3
+ L
2
4
+ 2 × L
1
L
4
cos(θ
4
0
+ (θ
4
1
− θ
4
0
)t)+
2 × L
2
L
4
cos(θ
4
0
− θ
2
0
+ (θ
4
1
− θ
2
1
)t − (θ
4
0
− θ
2
0
)t)+
2 × L
3
L
4
cos(θ
4
0
− θ
3
0
+ (θ
4
1
− θ
3
1
)t − (θ
4
0
− θ
3
0
)t)
(6)
If the derivative of this function is non-zero for each t
and any pair of points, then F is injective. We have
F
′
(t) =(θ
2
1
− θ
2
0
)F
θ
2
(t) + (θ
3
1
− θ
3
0
)F
θ
3
(t) + (θ
4
1
− θ
4
0
)F
θ
4
(t)
(7)
Also, for human hands, one can realize the following:
θ
2
= [0, 90
◦
] , θ
3
= θ
2
+ [0, 120
◦
] = [0, 210
◦
] =⇒ θ
3
− θ
2
= [0, 120
◦
]
θ
4
=θ
3
+ [0, 45
◦
] = θ
2
+ [0, 120
◦
] + [0, 45
◦
] = θ
2
+ [0, 165
◦
] =
[0, 255
◦
] =⇒ θ
4
− θ
2
= [0, 165
◦
] , θ
4
− θ
3
= [0, 45
◦
]
Now, by numerically populating T heta
i
s (combi-
nation of 2 from 486K, C
2
486K
), L
i
s, and t, we check if
the F(θ) is injective.
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
508
