
Synthetic Driver Image Generation for Human Pose-Related Tasks
Romain Guesdon
a
, Carlos Crispim-Junior
b
and Laure Tougne Rodet
c
Univ. Lyon, Univ. Lyon 2, CNRS, INSA Lyon, UCBL, Centrale Lyon,
LIRIS UMR5205, F-69676 Bron, France
Keywords:
Dataset, Synthetic Generation, Neural Networks, Human Pose Transfer, Consumer Vehicle.
Abstract:
The interest in driver monitoring has grown recently, especially in the context of autonomous vehicles. How-
ever, the training of deep neural networks for computer vision requires more and more images with significant
diversity, which does not match the reality of the field. This lack of data prevents networks to be properly
trained for certain complex tasks such as human pose transfer which aims to produce an image of a person
in a target pose from another image of the same person. To tackle this problem, we propose a new synthetic
dataset for pose-related tasks. By using a straightforward pipeline to increase the variety between the images,
we generate 200k images with a hundred human models in different cars, environments, lighting conditions,
etc. We measure the quality of the images of our dataset and compare it with other datasets from the literature.
We also train a network for human pose transfer in the synthetic domain using our dataset. Results show that
our dataset matches the quality of existing datasets and that it can be used to properly train a network on a
complex task. We make both the images with the pose annotations and the generation scripts publicly avail-
able.
1 INTRODUCTION
The increasing complexity of computer vision tasks
over the years has led to a growth in the size of deep
learning models. Therefore, more and more data has
been required to train the deep neural networks, with
more diversity among the images. Large-scale gen-
eral datasets have been published over the years to
answer this problem, such as ImageNet (Deng et al.,
2009), COCO (Lin et al., 2015), or DeepFashion (Liu
et al., 2016) datasets. However, specific contexts lack
sufficiently large datasets, especially because of the
high cost of acquisition in comparison with the size
of the research field.
Human Pose Transfer (HPT) is an example of a
data-demanding task. HPT aims to generate, from a
source image of a person, a new image of that same
person in a different target pose. Generative Ad-
versarial Networks (GAN) (Goodfellow et al., 2014)
achieve good performances on this task (Zhu et al.,
2019; Huang et al., 2020; Zhang et al., 2021), mostly
in two contexts: fashion and video surveillance im-
ages. These two domains correspond to the two main
datasets available for this task (Liu et al., 2016; Zheng
a
https://orcid.org/0000-0003-4769-9843
b
https://orcid.org/0000-0002-5577-5335
c
https://orcid.org/0000-0001-9208-6275
et al., 2015). However, a substantial number of im-
ages, with high diversity in persons, clothes, and en-
vironment is required to properly train GAN models.
These requirements are difficult to achieve in specific
contexts, for example, images of drivers in consumer
vehicles. In this context, data acquisition requires set-
ting up experimentations in a moving car (Guesdon
et al., 2021) or at least in a simulator (Martin et al.,
2019). These constraints lead to the availability of
few images with little variety of subjects.
A commonly used solution to tackle a lack of
training data is geometric data augmentation such as
random rotation, crop, scaling, etc. (Simard et al.,
2003; Krizhevsky et al., 2012). However, these meth-
ods may be sufficient for rigid objects but are not fully
suitable for articulated ones. An alternative is the use
of synthetic data. This process allows the generation
of a high number of images with a theoretically infi-
nite diversity and accurate annotations, within a lim-
ited time and financial cost. Even if a domain gap ex-
ists between synthetic and real images, literature has
demonstrated that generated images can be used to as-
sist the training of networks on real-world images for
many tasks (Juraev et al., 2022; Wu et al., 2022; Kim
et al., 2022). In the driving context, few synthetic
public datasets exist (Cruz et al., 2020; Katrolia et al.,
2021). Furthermore, these datasets mainly focus on
762
Guesdon, R., Crispim-Junior, C. and Rodet, L.
Synthetic Driver Image Generation for Human Pose-Related Tasks.
DOI: 10.5220/0011780800003417
In Proceedings of the 18th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2023) - Volume 5: VISAPP, pages
762-769
ISBN: 978-989-758-634-7; ISSN: 2184-4321
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

Figure 1: Samples of images from the proposed synthetic dataset.
monitoring tasks and emphasize more on actions than
on subject diversity.
To address the lack of diversity in driving vehi-
cles, we propose a large dataset of synthetic images
for pose-related tasks. We develop a pipeline where
we diversify the subjects (with 100 driver models),
but also the car cockpits, the environment, the light-
ing conditions, etc. The images are publicly available,
as well as the scripts used for data generation
1
.
This paper is organized as follows. Section 2
presents related work on driver image datasets. In
Section 3, we present our proposed process and the
synthetic dataset along with the choices made for the
generation. We show and evaluate in Section 4 the
generated images and an application of our dataset
with an HPT architecture. Finally, Section 5 presents
our conclusions and future work.
2 RELATED WORK
Work in the computer-vision field about drivers in
consumer vehicles mainly focuses on passenger mon-
itoring, mostly for safety-related tasks. Therefore,
datasets in real-world conditions or in driving simu-
lators have been published for tasks such as driver ac-
1
Images and generation scripts are publicly available
on : https://gitlab.liris.cnrs.fr/aura autobehave/synthetic
drivers
tivity recognition (Ohn-Bar et al., 2014; Jegham et al.,
2019; Martin et al., 2019; Borghi et al., 2020), driver
pose estimation (Guesdon et al., 2021), driver gaze
estimation (Ribeiro and Costa, 2019; Selim et al.,
2020), driver awareness monitoring (Abtahi et al.,
2014).
Most of these datasets contain RGB images from
video clips annotated for the target tasks. However,
these datasets usually do not provide pose annotations
required for the study of human pose transfer tasks.
Drive&Act (Martin et al., 2019) proposes a multi-
modal (RGB, NIR, depth) and multi-view dataset in
a static driving simulator, with 3D human pose and
activity annotations. DriPE dataset (Guesdon et al.,
2021) depicts drivers in consumer vehicles in real-
world driving conditions, with manually annotated
poses. However, these two datasets contain only 15
and 19 subjects, respectively, which is not enough to
fully train deep neural networks on a complex task,
such as HPT, according to our observations.
Regarding synthetic data for driver monitoring,
two datasets have been published. SVIRO (Cruz et al.,
2020), a synthetic dataset for scenarios in the pas-
senger cockpit. It depicts people and objects in the
car back seat with different placements and provides
RGB images along with infrared imitation, depth
maps, segmentation masks, and human pose ground-
truth keypoints. TICaM (Katrolia et al., 2021) is a
dataset with both real and synthetic images for vehicle
interior monitoring, with real images recorded in a car
Synthetic Driver Image Generation for Human Pose-Related Tasks
763
Blender
Basic Scene:
Configuration:
Human pose:
Synthetic images
+ annotations
MakeHuman
Human
Models
Unity
Car
Models
Default
camera
Default
background
Human
model
Car model
Background
Camera
deviations
Lighting
Targeted
upper body
Fix lower
body
Random
upper body
OR
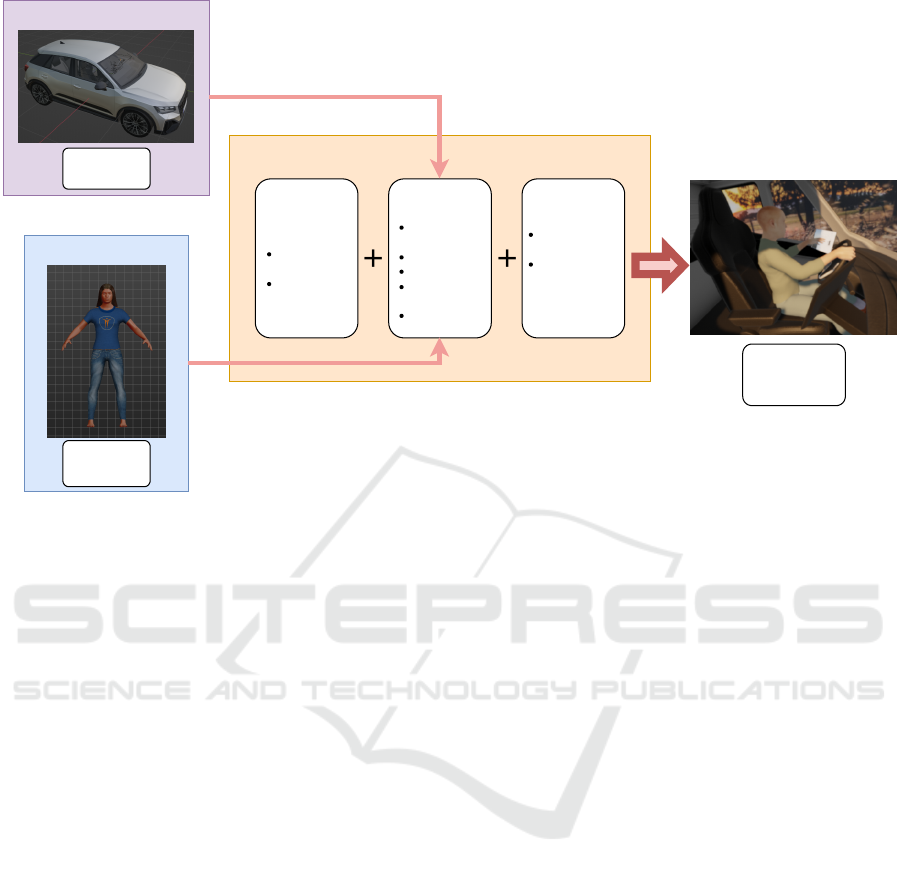
Figure 2: Global process for the generation of the synthetic driver images.
cockpit simulator. The dataset provides RGB, depth,
and infrared images with action annotations and seg-
mentation ground-truth masks. The two main issues
with these datasets are the front view angle, which
does not allow a clear view of the driver’s full body,
and the subject diversity which is still low for large
models such as GAN (Goodfellow et al., 2014) on
these data without overfitting. We can also mention
Ca
˜
nas et. al. (Canas et al., 2022) which describe
a global approach to generate synthetic images for
passenger monitoring. However, their work only par-
tially considers the question of random pose genera-
tion, and no script nor images have been made pub-
licly available so far.
In summary, there currently exists no publicly
available dataset suited to study driver pose transfer
with a high variety of driver subjects and a full body
view camera angle.
3 DATASET GENERATION
Because the driver datasets in the literature for hu-
man pose-related tasks lack diversity, deep generative
methods cannot be trained and used to increase the
available data quantity. We propose a process based
on a standard pipeline for 3D scene generation to ren-
der new synthetic images. Using this method, we
build a large dataset depicting one hundred human in-
stances, several car models, variations of luminance,
etc. In this section, we describe the generation pro-
cess and present statistics about the generated images.
3.1 3 D Models
To generate synthetic driver images, two objects need
to be modeled: cars and humans. Human models are
generated using MakeHuman Community (MakeHu-
man, 2022). This open-source software produces 3D
models with many parameters like age, height, mus-
cle mass, ethnicity, face proportions, etc. Models are
generated with a rigged skeleton, which allows ani-
mating them easily and realistically. We use the de-
fault clothes from MakeHuman along with some pro-
vided by the community. To generate many models,
we use the Mass Produce module which allows set-
ting an interval for each parameter. We also randomly
change the color of the clothes’ textures when gener-
ating the full scene to increase the diversity. The car
models are obtained on the Unity Asset store (Unity,
2022). We select different types of consumer vehicles
to represent various car cockpits (e.g., family cars,
sports cars, pick-ups), with equipment going from
plain dashboards to touchscreens.
3.2 Pose Generation
Human models are animated using the included
rigged skeleton (Figure 3-a). Theoretically, each bone
can rotate freely around the body joint where its head
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
764

Figure 3: Illustrations of the generation process in Blender with (a) the skeleton rig, (b) the fixed wrist targets (only used for
the additional driving images), (c) the default scene perspective, an example of the final scenes without (d) and with (e) the
light rendering, and (f) a view from the camera.
is attached, which gives it three degrees of liberty.
However, several constraints must be considered in
our case. First, no real human bone can fully rotate
in any direction. If we take the forearm for exam-
ple and consider that it is fully open by default, it can
approximately rotate from 0 to 150° around the pitch
and the roll axis and cannot rotate around its yaw axis
(Maik et al., 2010). Secondly, the car cabin is a con-
stricted space, which brings many constraints to avoid
the human and the car models colliding. Therefore, to
address these constraints, we proceed as follows:
1. We define a default pose, which corresponds to
the person sitting straight on the car seat with the
arms close to the upper body.
2. We perform small random rotations on the head,
back, and legs considering the human body con-
straints and the car cabin.
3. We randomly defined a target for each wrist, in
front of the subject and within the arm range.
We also add a constraint to force the targets to
be within a defined box that represents the cabin
space. The boxes are manually defined before-
hand for each car model to best match their shape.
4. We use an inverse kinematic solver integrated
into the 3D modeling software to place the wrists
on the targets. We only move the upper arms
and forearms during this process, which does not
modify the back inclination. This is to avoid un-
natural poses in the car seat. Kinematic angle con-
straints are set on each involved bone to match
real body constraints.
This process allows us to easily generate many ran-
dom plausible poses while taking into consideration
body and environment constraints.
However, random positioning is very unlikely to
generate standard driving poses, such as hands on the
wheel or the gear lever. This is not problematic when
considering the car as an autonomous vehicle of level
2 or 3 for example, but can be less realistic for man-
ual driving tasks (in a vehicle of levels of autonomy
0 or 1). Therefore, we additionally set in each car
model fixed wrist targets on the wheel, gear lever, and
dashboard (Figure 3-b). We use these targets instead
of random ones to separately generate more realistic
driving images.
3.3 Generation Process
To set up the full scene and render the images, we use
Blender 3.2 (Blender, 2022) modeling software. Its
advantages are that it is free and open-source, accessi-
ble, and can be fully automated using python scripts.
The global rendering process is summarized in Fig-
ure 2.
We first create the default scene by setting up a
fixed camera, a sunlight source, and a panel for the
background image (Figure 3-c). We use high-quality
images of landscapes to simulate the background,
which allows us to easily leverage a high number
Synthetic Driver Image Generation for Human Pose-Related Tasks
765
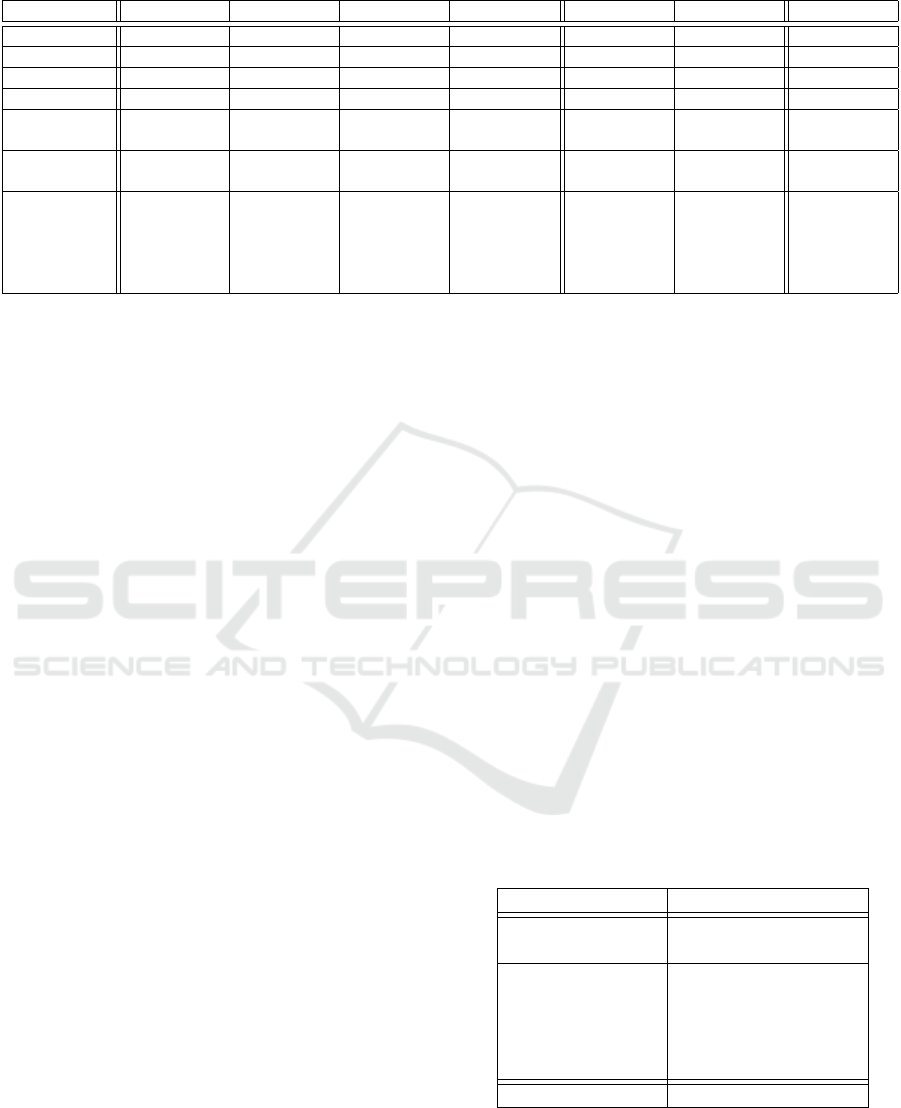
Table 1: Comparison table between different datasets.
Dataset SVIRO TICaM Drive&Act DriPE Market Fashion Ours
Year 2020 2021 2019 2021 2015 2016 2022
#Frames 25K 126K 9.6M 10k 33k 54k 200k
#Subjects 22 adults 13 15 19 ∼ 3k ∼ 10k 100
#Views 1 1 6 1 - - 1
Synthetic /
Real
Synthetic Both Real Real Real Real Synthetic
Data
Depth,
RGB, IR
Depth,
RGB, IR
Depth,
RGB, IR
RGB RGB RGB RGB
Annotation
Classification
labels, 2D
box mask,
2D skeleton
2D+3D
boxes, 3D
segmenta-
tion mask,
activity
Activity,
2D+3D
skeletons
2D boxes,
skeleton
2D skeleton 2D skeleton
2D+3D
skeletons
and boxes
of different backgrounds from free picture databases.
The 3D models are then imported into the scene.
Then, we randomly define several configurations,
where a configuration is composed of a human model,
a car model, a background, small camera deviations,
and lighting parameters (Figure 3-d, e. Note that the
black triangle in the illustrations represents the up di-
rection of the camera model). We use a Blender add-
on that places the sun in a realistic position from GPS
coordinates and date time, which we set randomly.
We also generate night configurations by selecting
night backgrounds and dimming the lights. The night
setting is randomly used 20% of the time.
Finally, for each configuration, we generate a pose
using the process described in Section 3.2 (Figure 3-
f) and render the image. We also save the 2D and 3D
coordinates of each body joint, the bounding boxes,
and the camera’s intrinsic and extrinsic parameters.
4 RESULTS AND DISCUSSIONS
In this section, we present and discuss methods used
to evaluate the relevance of the proposed dataset. We
first compare it with other state-of-the-art datasets us-
ing metrics from the literature to measure the quality
of the images. Then, we use the task of human pose
transfer to evaluate whether our synthetic dataset is
large and diversified enough for a complex task.
4.1 Dataset Evaluation
We define a total of 1.000 configurations by randomly
picking between 7 cars and 100 human models. For
each configuration, 200 poses are generated, which
results in a dataset of 200k images.
In Table 1, we compare our dataset with sev-
eral other datasets from the literature. We can see
that our dataset possesses more images than both
driver synthetic and real-world HPT datasets. The
only exception is Drive&Act, which is composed of
video clips instead of single images, which multiplies
the total number of frames. However, the proposed
dataset presents far more driver models than previous
datasets.
Then, we compare the quality of the synthetic im-
ages with the ones in other datasets. For this purpose,
we use the Inception Score (IS) (Salimans et al., 2016)
which is a metric commonly used to evaluate the qual-
ity of images generated by GAN (Zhu et al., 2019;
Tang et al., 2020; Huang et al., 2020). This metric
is based on the predictions from a pre-trained Incep-
tionNet classifier (Szegedy et al., 2016). Since In-
ception Score is sensitive to image sizes, each dataset
is resized to approximately match the same number
of pixels. We choose a standard size of 49,152 pix-
els, which corresponds to a shape of 192 ∗ 256 pixels.
The Inception Score is computed on the full datasets
using a Pytorch implementation of the original IS al-
gorithm (Pytorch metrics, 2022). Results of the eval-
uation can be found in Table 2.
Table 2: Evaluation of the image quality of the full dataset
using Inception Score.
Dataset Inception Score (IS) ↑
DeepFashion 4.247
Market 4.223
DriPE 1.481
Drive&Act 1.343
SVIRO 1.902
TICam - synthetic 1.276
TICam - real 1.662
Ours 2.391
First, we observe in Table 2 that the two datasets
used for HPT, i.e., DeepFashion and Market, present
a score strictly higher than the one measured on
driver datasets. This can be explained by the fact
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
766

Figure 4: Samples from the test inferences generated by the GAN trained on our synthetic dataset.
that the Inception Score reflects two aspects: the in-
trinsic quality of each image and the variety among
the dataset (Salimans et al., 2016). Since the driver
datasets present fewer subjects with large and fixed
foregrounds, we can expect a lower IS. However, we
can see that our synthetic dataset obtains a better score
than the other driver datasets. This suggests that its
images have an apparent quality similar to those from
the other driver datasets while presenting a larger va-
riety.
4.2 Human Pose Transfer
As mentioned in Section 1, training a model for a
complex task such as human pose transfer, without
heavily overfitting the training set, requires many im-
ages with a high variety of subjects.
Therefore, we train an HPT generative network
on our synthetic dataset to evaluate the diversity of
its images. We chose from the state of the art the
APS architecture (Huang et al., 2020), which presents
competitive performances with no need for additional
input data such as segmentation maps. We train the
network using the scripts provided by the authors in
their repository. We adopted the same hyperparame-
ters used for training on the DeepFashion dataset and
resize our synthetic images to 192x256 pixels to get
closer to the size of the DeepFashion images. The
proposed dataset is split into a training set of 180k
pictures and a testing set of 20k pictures, and these
two sets do not share any subject model.
To measure the quality of our results, we evaluate
the images using several state-of-the-art metrics (Ta-
ble 3): Inception Score (IS), Frechet Inception Dis-
tance (FID) (Heusel et al., 2017), and Structural Sim-
ilarity (SSIM) (Wang et al., 2004). FID and SSIM are
computed using the same script as IS (Pytorch met-
rics, 2022). Unlike the evaluation of the datasets in
Section 4.1, the metrics here are only computed on
the images generated by the network on the test set.
Table 3: Evaluation of images generated by an APS network
trained on different datasets.
Dataset IS ↑ FID ↓ SSIM ↑
Fashion 3.565 16.84 0.669
Market 3.144 41.49 0.312
Synthetic 2.456 38.06 0.810
First, we observe that the Inception Score of the
generated images is close to the one measured on
the full synthetic dataset in Table 2. Then, the FID
distance between the driver images generated by the
GAN and the ground truth images is close to the one
observed with the Market dataset. Furthermore, the
SSIM score, which measures the structural similar-
ity between two images, is higher on our synthetic
dataset than on both Fashion and Market. This can be
explained by the fact that more than half the surface of
Synthetic Driver Image Generation for Human Pose-Related Tasks
767

driver images is composed of a fixed background that
the GAN network can easily preserve since it almost
does not change during the pose transfer.
We can notice that the score measures on the Fash-
ion dataset are better than those on both the Market
and our synthetic dataset. This can be explained by
the simplicity of the Fashion images context, espe-
cially the lack of a complex background, fully visible
body parts, etc., in comparison with the real-life im-
ages in the two other datasets.
Finally, Figure 4 presents qualitative results of the
trained GAN. The generated images show that the
network learned to reproduce the pose while preserv-
ing most of the visual characteristics of the subject
and the global environment. This result indicates that
the network can learn and generalize on our dataset.
In the end, the evaluation results combined with the
qualitative results suggest that our dataset contains
enough diversity to train a network for a complex task
without overfitting.
5 CONCLUSION
In this paper, we have presented a dataset of 200k
synthetic driver images for human pose-related tasks
with a large diversity of human models to answer the
lack of available datasets on driver monitoring tasks.
Using state-of-the-art metrics, we demonstrated that
the quality of our synthetic images is comparable to
the one measured in existing datasets, synthetic or
real-world. We finally trained a GAN for human
pose transfer, a data-demanding task, on our synthetic
dataset. The network achieved similar performances
to those trained for HPT on real-world datasets for
other applications, which demonstrates that the pro-
posed synthetic dataset is diverse enough to train large
networks. This dataset is publicly available as well as
the script used to generate it.
Future work will investigate the problem of do-
main adaptation from synthetic to real-world driver
images in models for human pose-related tasks.
Moreover, the proposed pipeline could be used to ex-
tend our dataset with multiple views to approach tasks
such as 3D human pose estimation, or with real activ-
ities for passenger monitoring.
ACKNOWLEDGEMENTS
This work was supported by the Pack Ambition
Recherche 2019 funding of the French AURA Region
in the context of the AutoBehave project.
REFERENCES
Abtahi, S., Omidyeganeh, M., Shirmohammadi, S., and
Hariri, B. (2014). Yawdd: A yawning detection
dataset. In Proceedings of the 5th ACM multimedia
systems conference, pages 24–28.
Blender (2022). Blender. https://www.blender.org/. Ac-
cessed: 2022-11-01.
Borghi, G., Pini, S., Vezzani, R., and Cucchiara, R. (2020).
Mercury: a vision-based framework for driver moni-
toring. In International Conference on Intelligent Hu-
man Systems Integration, pages 104–110. Springer.
Canas, P. N., Ortega, J. D., Nieto, M., and Otaegui, O.
(2022). Virtual passengers for real car solutions: syn-
thetic datasets. arXiv preprint arXiv:2205.06556.
Cruz, S. D. D., Wasenmuller, O., Beise, H.-P., Stifter, T.,
and Stricker, D. (2020). Sviro: Synthetic vehicle in-
terior rear seat occupancy dataset and benchmark. In
Proceedings of the IEEE/CVF Winter Conference on
Applications of Computer Vision, pages 973–982.
Deng, J., Dong, W., Socher, R., Li, L.-J., Li, K., and Fei-Fei,
L. (2009). Imagenet: A large-scale hierarchical im-
age database. In Proceedings of the IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition,
pages 248–255. Ieee.
Goodfellow, I., Pouget-Abadie, J., Mirza, M., Xu, B.,
Warde-Farley, D., Ozair, S., Courville, A., and Ben-
gio, Y. (2014). Generative adversarial nets. In Ghahra-
mani, Z., Welling, M., Cortes, C., Lawrence, N., and
Weinberger, K., editors, Advances in Neural Infor-
mation Processing Systems, volume 27. Curran Asso-
ciates, Inc.
Guesdon, R., Crispim-Junior, C., and Tougne, L. (2021).
Dripe: A dataset for human pose estimation in
real-world driving settings. In Proceedings of the
IEEE/CVF International Conference on Computer Vi-
sion Workshops, pages 2865–2874.
Heusel, M., Ramsauer, H., Unterthiner, T., Nessler, B., and
Hochreiter, S. (2017). Gans trained by a two time-
scale update rule converge to a local nash equilibrium.
Advances in neural information processing systems,
30.
Huang, S., Xiong, H., Cheng, Z.-Q., Wang, Q., Zhou, X.,
Wen, B., Huan, J., and Dou, D. (2020). Generating
person images with appearance-aware pose stylizer. In
IJCAI.
Jegham, I., Khalifa, A. B., Alouani, I., and Mahjoub, M. A.
(2019). Mdad: A multimodal and multiview in-
vehicle driver action dataset. In International Confer-
ence on Computer Analysis of Images and Patterns,
pages 518–529. Springer.
Juraev, S., Ghimire, A., Alikhanov, J., Kakani, V., and Kim,
H. (2022). Exploring human pose estimation and
the usage of synthetic data for elderly fall detection
in real-world surveillance. IEEE Access, 10:94249–
94261.
Katrolia, J. S., El-Sherif, A., Feld, H., Mirbach, B., Ram-
bach, J. R., and Stricker, D. (2021). Ticam: A time-of-
flight in-car cabin monitoring dataset. In 32nd British
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
768

Machine Vision Conference 2021, BMVC 2021, On-
line, November 22-25, 2021, page 277. BMVA Press.
Kim, T. S., Shim, B., Peven, M., Qiu, W., Yuille, A., and
Hager, G. D. (2022). Learning from synthetic vehi-
cles. In Proceedings of the IEEE/CVF Winter Confer-
ence on Applications of Computer Vision, pages 500–
508.
Krizhevsky, A., Sutskever, I., and Hinton, G. E. (2012).
Imagenet classification with deep convolutional neu-
ral networks. In Pereira, F., Burges, C. J. C., Bottou,
L., and Weinberger, K. Q., editors, Advances in Neu-
ral Information Processing Systems 25, pages 1097–
1105. Curran Associates, Inc.
Lin, T.-Y., Maire, M., Belongie, S., Bourdev, L., Girshick,
R., Hays, J., Perona, P., Ramanan, D., Zitnick, C. L.,
and Doll
´
ar, P. (2015). Microsoft coco: Common ob-
jects in context.
Liu, Z., Luo, P., Qiu, S., Wang, X., and Tang, X. (2016).
Deepfashion: Powering robust clothes recognition and
retrieval with rich annotations. In Proceedings of the
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition, pages 1096–1104.
Maik, V., Paik, D., Lim, J., Park, K., and Paik, J. (2010).
Hierarchical pose classification based on human phys-
iology for behaviour analysis. Computer Vision, IET,
4:12 – 24.
MakeHuman (2022). Makehuman community. http://www.
makehumancommunity.org/. Accessed: 2022-11-01.
Martin, M., Roitberg, A., Haurilet, M., Horne, M., Reiß,
S., Voit, M., and Stiefelhagen, R. (2019). Drive&act:
A multi-modal dataset for fine-grained driver behavior
recognition in autonomous vehicles. In Proceedings of
the IEEE/CVF International Conference on Computer
Vision, pages 2801–2810.
Ohn-Bar, E., Martin, S., Tawari, A., and Trivedi, M. M.
(2014). Head, eye, and hand patterns for driver activ-
ity recognition. In 2014 22nd international conference
on pattern recognition, pages 660–665. IEEE.
Pytorch metrics (2022). Pytorch implementation of com-
mon gan metrics. https://github.com/w86763777/
pytorch-gan-metrics. Accessed: 2022-11-01.
Ribeiro, R. F. and Costa, P. D. P. (2019). Driver gaze
zone dataset with depth data. In 2019 14th IEEE In-
ternational Conference on Automatic Face & Gesture
Recognition (FG 2019), pages 1–5.
Salimans, T., Goodfellow, I., Zaremba, W., Cheung, V.,
Radford, A., and Chen, X. (2016). Improved tech-
niques for training gans. Advances in neural informa-
tion processing systems, 29.
Selim, M., Firintepe, A., Pagani, A., and Stricker, D.
(2020). Autopose: Large-scale automotive driver head
pose and gaze dataset with deep head orientation base-
line. In VISIGRAPP (4: VISAPP), pages 599–606.
Simard, P. Y., Steinkraus, D., and Platt, J. C. (2003). Best
practices for convolutional neural networks applied to
visual document analysis. In Proceedings of the Sev-
enth International Conference on Document Analysis
and Recognition-Volume 2, page 958.
Szegedy, C., Vanhoucke, V., Ioffe, S., Shlens, J., and Wo-
jna, Z. (2016). Rethinking the inception architecture
for computer vision. In Proceedings of the IEEE/CVF
Conference on Computer Vision and Pattern Recogni-
tion, pages 2818–2826.
Tang, H., Bai, S., Zhang, L., Torr, P. H., and Sebe, N.
(2020). Xinggan for person image generation. In Pro-
ceedings of the European conference on computer vi-
sion, pages 717–734.
Unity (2022). Unity asset store. https://assetstore.unity.
com/. Accessed: 2022-11-01.
Wang, Z., Bovik, A. C., Sheikh, H. R., and Simoncelli, E. P.
(2004). Image quality assessment: from error visi-
bility to structural similarity. IEEE transactions on
image processing, 13(4):600–612.
Wu, Y., Yuan, Y., and Wang, Q. (2022). Learning from
synthetic data for crowd instance segmentation in the
wild. In 2022 IEEE International Conference on Im-
age Processing (ICIP), pages 2391–2395. IEEE.
Zhang, J., Li, K., Lai, Y.-K., and Yang, J. (2021). Pise:
Person image synthesis and editing with decoupled
gan. In Proceedings of the IEEE/CVF Conference
on Computer Vision and Pattern Recognition, pages
7982–7990.
Zheng, L., Shen, L., Tian, L., Wang, S., Wang, J., and Tian,
Q. (2015). Scalable person re-identification: A bench-
mark. In Proceedings of the IEEE/CVF International
Conference on Computer Vision.
Zhu, Z., Huang, T., Shi, B., Yu, M., Wang, B., and Bai, X.
(2019). Progressive pose attention transfer for person
image generation. In Proceedings of the IEEE/CVF
Conference on Computer Vision and Pattern Recogni-
tion, pages 2347–2356.
Synthetic Driver Image Generation for Human Pose-Related Tasks
769
