
Reciprocal Adaptation Measures for Human-Agent Interaction
Evaluation
Jieyeon Woo, Catherine Pelachaud and Catherine Achard
ISIR-CNRS, Sorbonne University, 4 Place Jussieu, Paris, France
Keywords:
Socially Interactive Agents, Human-Agent Interaction, Reciprocal Adaptation, Nonverbal Behaviors, Smile.
Abstract:
Recent works focus on creating socially interactive agents (SIAs) that are social, engaging, and human-like.
SIA development is mainly on endowing the agent with human capacities such as communication and behavior
adaptation skills. Nevertheless, the task of evaluating the agent’s quality remains as a challenge. Especially,
the way of objectively evaluating human-agent interactions is not evident. To address this problem, we pro-
pose new measures to evaluate the agent’s interaction quality. This paper focuses on interlocutors’ continuous,
dynamic, and reciprocal behavior adaptation during an interaction, which we refer to as reciprocal adaptation.
Our reciprocal adaptation measures capture this adaptation by measuring the synchrony of behaviors includ-
ing their absence of response and by assessing the behavior entrainment loop. We investigate the nonverbal
adaptation, notably for smile, in dyads. Statistical analyses are conducted to improve the understanding of the
adaptation phenomenon. We also studied how the presence of reciprocal adaptation may be related to different
aspects of the interaction dynamics and conversational engagement. We investigate how the influence of the
social dimensions of warmth and competence along with the engagement is related to reciprocal adaptation.
1 INTRODUCTION
Socially Interactive Agents (SIAs; or embodied con-
versational agents (ECAs)) have the goal of conduct-
ing human-like conversations while being social and
engaging. Various works focus on the development
of SIAs by improving the modeling of their behav-
iors. Nevertheless, the task of evaluating them ob-
jectively remains as a challenging problem. As SIAs
are interacting with the human users, the assessment
must not only be done at the agent’s side but also at
the interaction level considering the human interlocu-
tor. For this, we propose new measures of reciprocal
adaptation that can be used to evaluate human-agent
interactions.
During an interaction, behavior adaptation be-
tween interlocutors takes place. The adaptation is
done by coordinating (or synchronizing) one’s behav-
ior to that of the other and by constantly entraining
and being entrained by the interacting partner.
The behavior coordination involves complex phe-
nomena such as perceiving social signals and re-
sponding to these social signals within a given time
window (Chartrand and Lakin, 2013; Burgoon et al.,
1995). Conversation participants exchange by react-
ing to each other’s social signals. The exchange is
not simply alternated by taking turns between the par-
ticipants (having a single reactor at the time), but
the coordination involves different processes such as
anticipating and producing behaviors. These behav-
iors are coordinated intrapersonally (between the be-
haviors of the same person) and interpersonally (be-
tween interlocutors). Condon and Ogston (Condon
and Ogston, 1966) point out that there are intraper-
sonal synergies that are formed between one’s behav-
iors and these synergies are coordinated across the
interlocutors. They split the coordination into two
types: intrapersonal coordination for the behavior co-
ordination within oneself and interpersonal coordina-
tion for behavior coordination between multiple peo-
ple in an interaction. To be coordinated these behav-
iors should match each other in action and time (Hove
and Risen, 2009; Burgoon et al., 1995). We can note
that Chartrand and Lakin (Chartrand and Lakin, 2013)
used the term behavioral mimicry when referring to
the display of a same behavior at the same time by 2
or more participants. For interpersonal coordination,
an essential aspect is that the behaviors are timely
aligned (Delaherche et al., 2012). This coordination
of social signals may also be referred to as interper-
sonal synchrony. Pickering and Garrod (Pickering
and Garrod, 2004) talk about alignment defined as the
114
Woo, J., Pelachaud, C. and Achard, C.
Reciprocal Adaptation Measures for Human-Agent Interaction Evaluation.
DOI: 10.5220/0011779300003393
In Proceedings of the 15th International Conference on Agents and Artificial Intelligence (ICAART 2023) - Volume 1, pages 114-125
ISBN: 978-989-758-623-1; ISSN: 2184-433X
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

adaptation of interlocutors’ verbal behaviors. The in-
terpersonal coordination of behaviors is an ongoing
operation that turns automatically in time during a
natural interaction (Schmidt and Richardson, 2008).
Thus, synchrony is dynamic and is a part of recipro-
cal adaptation.
It is also important to note that the interpersonal
coordination, that is done passively and unintention-
ally to match the interacting partner’s behavior, has
a certain delay of perception and adaptation. Char-
trand and Bargh (Chartrand and Bargh, 1999), who
state that the interpersonal coordination is caused by
mimicry behavior, call this unconscious adaptation
(or mimicry) effect the chameleon effect. This per-
ception of interlocutors’ signal is sensible to temporal
alignment. For nonverbal signals the temporal align-
ment (or the mimicry time delay) is along a time win-
dow of 2 to 4 seconds (Leander et al., 2012).
Continuous entrainment occurs between the inter-
locutors (Prepin and Pelachaud, 2011). When a per-
son shows a behavior, it entrains the mimicry behavior
of their interactant. The entrainment doesn’t end with
a simple mimicry but it also rentrains the initial sig-
nal sender to continue performing the same behavior
or to resend the same signal. We refer to this process
of sequential entrainment as entrainment loop.
We are interested in understanding and measuring
reciprocal adaptation, looking at the temporal syn-
chronization and entrainment loop between partici-
pants’ behaviors. We propose novel measures to un-
derstand how reciprocal adaptation emerges during
an interaction. By studying these measures, we have
identified different levels of synchrony and entrain-
ment loop of dyads. We also study how synchrony
and entrainment loop participate in the perception of
engagement between interlocutors and in the percep-
tion of interlocutors’ social attitudes. We hypothesize
to see a proportional relationship between reciprocal
adaptation (synchrony and entrainment loop) and en-
gagement levels. We also hypothesize that recipro-
cal adaptation may have an impact on the perception
of the social dimensions of warmth and competence
of the interlocutors, with a positive correlation with
warmth and negative relation with competence.
In our study, we focus on smile, a social signal
that may convey a great variety of communicative and
emotional functions (Niedenthal et al., 2010; Hess
et al., 2014). Smiles are frequently observed during
an interaction (Knapp et al., 2013). They can signal
friendliness, positive emotions; they can be used as
a polite signal to greet an acquaintance; they can be
indicated as agreement, liking; etc. Smile is an im-
portant socio-emotional signal that has received a lot
of interest in affective computing domains. Previous
studies have highlighted the power of smiling SIAs to
achieve such a goal (Wang and Ruiz, 2021; Ochs and
Pelachaud, 2013).
We present new reciprocal adaptation measures
that can be employed to objectively evaluating the
quality of the agent in human-agent interaction. Our
ultimate goal is to build socially interactive SIAs that
is able to maintain user’s engagement during an inter-
action. In the scopes of this paper, we are interested in
studying reciprocal adaptation of the smile behaviors
in a dyadic interaction. To do so, we propose new ob-
jective measures that studies the synchrony of behav-
iors including their absence of response and behavior
entrainment loop to better understand how nonverbal
behavior adaptation emerges during an interaction.
We aim to investigate how they are displayed between
the participants of an interaction and how they partic-
ipate to the perception of conversational engagement
and to the perception of social attitudes of the partici-
pants. We look at the relation of reciprocal adaptation
with the engagement level and the social dimensions
of warmth and competence.
The paper is structured as the following: Section 2
introduces related measures for reciprocal adaptation
evaluation; Section 3 explains our reciprocal adapta-
tion measures; Section 4 presents the analyzed cor-
pus; and Section 5 shares statistical analysis of the
our reciprocal adaptation measures and their relation-
ship with engagement and social attitudes of warmth
and competence.
2 EXISTING MEASURES
During a conversation, interlocutors dynamically
adapt by coordinating their speech and behav-
iors (Condon and Ogston, 1967; Burgoon et al., 1995;
Bernieri and Rosenthal, 1991; Chartrand and Lakin,
2013). Among the various social signals that are pro-
duced during an interaction, the smile is one of the
most important human interaction signals. The smile
alone can express diverse information (e.g. affect
state, level of engagement, and intrinsic nature) to the
interacting partner in a variety of social context (Ek-
man, 1992; Hess et al., 2002). The presence of smile
that incorporates such diverse implications can im-
pact the perception by other partner (e.g trust, in-
telligence, warmth, and attractiveness) (Scharlemann
et al., 2001; Lau, 1982; Reis et al., 1990). As such,
we want to check the influence of smile between the
interlocutors and thus hold interest in measuring the
smile adaptation. To find out how to measure the
adaptation of smiles, we investigate on related mea-
sures notably synchrony measures (e.g. measures for
Reciprocal Adaptation Measures for Human-Agent Interaction Evaluation
115

nonverbal signals and biomedical signals).
Early works on synchrony started off with man-
ual assessment done by trained observers who were
trained to perceive it directly in the data. Such eval-
uations were based on behavior coding methods that
evaluate the interaction behaviors on a local scale by
analyzing them in micro-units (Cappella, 1997; Con-
don and Sander, 1974). However, the training of ob-
servers is very labour-intensive which led them to
switch to a judgment method that uses a Likert scale
to rate behaviors on a longer time scale (Cappella,
1997; Bernieri et al., 1988). The problem with man-
ual annotations, that rely on perception by a third
party, is that it is very costly. Manual annotations
are very time-consuming and there is a risk of be-
ing biased as the label decision depends heavily on
the annotator. Thus, we want an objective evaluation
technique that can automatically process and render a
non-biased synchrony measure.
Automatic measures enable us to avoid tedious
work of manual annotation by automatically captur-
ing relevant social signals that detect the presence of
synchrony. The most commonly used way to mea-
sure interpersonal synchrony is correlation (Camp-
bell, 2008; Delaherche and Chetouani, 2010; Rei-
dsma et al., 2010). As the behavior movements (e.g.
body motion and vocal energy) are produced after the
perception of the other interlocutors’ motions there
is a certain time delay to be considered. Several
works address this by applying the time-lagged cross-
correlation (Boker et al., 2002; Ashenfelter et al.,
2009; Be
ˇ
nu
ˇ
s et al., 2011). A hindersome limitation
of correlation is that a window length of interaction
must be chosen to perform the correlation. However,
the window sizes can vary for each produced motion
and are not the same for interactors.
Another method of synchrony evaluation is the re-
currence analysis (Shockley et al., 2003; Varni et al.,
2010). The analysis assesses “recurrence points”
which are points in time where similar states (or pat-
terns of change) are visited by two different sys-
tems. The recurrent analysis depends on manipu-
latable states (e.g. posture state or affect state) and
shows a graphical representation (a diagonal struc-
ture) of time periods when two systems visit the same
state. For the recurrent analysis, the evaluation re-
quires a fixed length of system periods and time shifts.
However, the signals do not happen exactly after a
certain time but within a time delay (e.g. 2 to 4 sec-
onds) (Chartrand and Bargh, 1999; Leander et al.,
2012).
The response of a smile is very dynamic. Each
smile is not produced with the same length, and as
stated above, the timing of the smile varies. For exam-
ple, when we are asked to reproduce a smile that we
have made, it is almost impossible to recreate the ex-
act same smile with the same duration and timing. To
address such dynamics, the measure must be invariant
to dilations and shifts. A frequently used technique to
do so is the Dynamic Time Warping (DTW) (M
¨
uller,
2007) which assesses the similarity between two tem-
poral sequences of different speed and length. Never-
theless, the DTW matches every index of a sequence
with one or more indexes from the other, which can
be problematic for our case of nonverbal behaviors as
both cases of a behavior occurring or not are correct
answers (i.e. absence of response, for instance a per-
son can reply with a smile or choose to not reply but
both cases are plausible responses) but the DTW will
consider it as an error.
New indicators characterizing synchrony phe-
nomena were introduced by Rauzy et al. (Rauzy et al.,
2022). They consider the two signal timescales as os-
cillating normal modes associated with the sum and
the difference of the trajectories (x
sum
for symmetric
mode and x
di f f
for asymmetric mode). Based on the
two, they propose new indicators (mode characteristic
periods, coupling factor, coefficient of synchrony, and
energy) to evaluate the synchrony.
As an alternative to temporal methods, spectral
analysis was suggested. The evolution of relative
phase for a stable time-lag between interlocutors is
measured (Oullier et al., 2008; Richardson et al.,
2007). It also renders information about the coordina-
tion stability with the flatness degree of the phase dis-
tribution and the overlapping frequency via the cross-
spectral coherence. The synchrony can be also mea-
sured in the time-frequency domain via cross-wavelet
coherence (Hale et al., 2020).
The field of biomedical signal processing also
holds a big interest in such synchrony measures
for applications such as detecting synchrony in
EEG (Bakhshayesh et al., 2019). Various metrics
are employed from point to point measures such
as correlation and coherence (a linear correlation
computed in the frequency domain via cross spec-
trum), correntropy coefficient (a correlation measure
that is sensitive to nonlinear relationship and high
order statistics), wav-entropy coefficient (a corren-
tropy computed in the time-frequency domain with
wavelet transforms), to measures that are solely fo-
cused on synchronization like phase synchrony (an
amplitude-independent estimation of signal phase re-
lationship) and event synchronization (a measure cal-
culated from the number of occurrences of predefined
signal events, counting events that are followed by an-
other event in the other signal within a specified time,
and their symmetric counterpart). Yet these measures
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
116

are not suitable for our use as stated above for point to
point measures and as for phase synchrony the subse-
quences of a signal might have different phase delays
which could be troublesome. For event synchroniza-
tion, it does not match exactly with our specific con-
dition.
In our work, we are interested in measuring how
people adapt their behavior, in particular their smile,
during an interaction. During an interaction, partici-
pants may respond and adapt to each other’s behavior.
These interactive behaviors may serve to reinforce the
relationship between the participants, their engage-
ment in the interaction, but also to display different
social attitudes. We are interested in measuring recip-
rocal adaptation as a function of synchrony patterns
and entrainment loop. Our measure of synchrony
patterns includes when participants respond or not
to each other’s behaviors. The absence of response
is considered as an error by the point to point mea-
sures (e.g. correlation) and the DTW approach and is
completely ignored by the recurrent analysis, spectral
analysis, and cross-wavelet analysis. However, the
absence of response may also convey important infor-
mation about the interaction. In order to study the im-
pact of absence of response, we need a new measure
that is capable of detecting the addition (produced by
oneself without the reaction of the other) and the sup-
pression (produced by the other without the reaction
of oneself) of signals while still being able to measure
the synchrony between the interlocutors. In addition
to the absence of response, we interest in observing
the behavior entrainment loop. We propose to also
capture this entrainment loop which is absent in the
aforementioned synchrony measures.
3 OUR PROPOSED RECIPROCAL
ADAPTATION MEASURES
To our knowledge, existing measures (see Section 2)
are not suitable for our problem, notably regarding
the absence of a response and capturing the entrain-
ment loop. To overcome this limitation, we propose a
new ways to measure the reciprocal adaptation for a
dyadic pair that measure the synchrony of behaviors
including their absence of response while tolerating
time swift, dilation, deletion and insertion, and cap-
ture the behavior entrainment loop.
3.1 Measures of Synchrony Behavior
Including their Absence of Response
We firstly address the problem by taking into account
the absence of response when measuring the syn-
chrony. Our method derives from the classical se-
quence dissimilarity quantification technique called
edit distance or Levenshtein distance (Navarro, 2001).
Its use can be mostly observed in fields such as natu-
ral language processing (Lhoussain et al., 2015) and
bioinformatics (Chang and Lawler, 1994) as it com-
pares the similarity between two strings (e.g. words)
by counting the minimum number of transformation
operations that are required to convert one string into
the other. We grab the concepts of insertion and dele-
tion of the edit distance while we don’t use the con-
cept of substitution.
We evaluate the synchrony with signal activation
by converting continuous values to binary values and
extract subsequences corresponding to active signal
parts, with their starting (s) and ending (e) times. We
choose to binarize the continuous values to better see
the impact of absence of response. Let us consider an
active subsequence (sequence of 1) A from person PA
and B from person PB.
We consider that both subsequences are synchro-
nized or paired if:
|
e
A
− e
B
|
+
|
s
A
− s
B
|
≤ threshold (1)
where the threshold is set to the mimicry time delay
(i.e. 4 seconds which gave the best results among
the thresholds of 2, 3, and 4 seconds). For our ap-
plication of measuring the synchrony of smile, we
took the threshold of 4 seconds (considering all re-
sponses that happen within a maximum of 4 seconds);
actually the literature on nonverbal behavior mimicry
states that the mimicry time delay can vary from 2 to
4 seconds (Chartrand and Bargh, 1999; Leander et al.,
2012).
If several subsequences of a person check this con-
dition with the same subsequence of the other person,
a synced pair is formed with the one that has the mini-
mum distance. The other subsequences are not paired.
Both paired subsequences and unpaired subse-
quences of persons A and B are considered to estimate
the synchrony:
PA&PB =
nb. o f synced pairs
total nb. o f events
PA&¬PB =
nb. o f unpaired subseq.s(seqA|seqB)
total nb. o f events
PB&¬PA =
nb. o f unpaired subseq.s(seqB|seqA)
total nb. o f events
Reciprocal Adaptation Measures for Human-Agent Interaction Evaluation
117

where the total number of events is the sum of the
number of synced pairs and the number of unpaired
subsequences of both persons A and B.
Each measure renders a probability that corre-
sponds to:
• PA&PB: PA and PB responding to each other,
• PA&¬PB: PA is active but not PB,
• PB&¬PA: PB is active but not PA.
PA&PB means that both participants smile simul-
taneously or with a small delay corresponding to the
reacting time; this measure represents the sync be-
tween PA and PB. For PA&¬PB and PB&¬PA, only
one of the person is acting (PA smiles and PB does not
smile, and vice versa), these measures indicate that PA
and PB are not in sync.
3.2 Measure of Entrainment Loop
We are also interested in capturing the entrainment
of smile. The smile of PA can entrain the smile of
PB which then entrains PA to continue to smile or to
smile again within a certain time delay and vice versa.
We refer to this as the entrainment loop of smile. The
entrainment loop consists of two types:
• Type 1: continuous smile, seen in Figure 1;
• Type 2: repeated smile with an overlap or within
a certain time delay (i.e. mimicry delay of 4 sec-
onds), seen in Figure 2 and Figure 3 respectively.
Figure 1: Entrainment loop type 1 of a continuous smile of
PA.
Figure 2: Entrainment loop type 2 of a repeated smile of PA
with overlap.
Figure 3: Entrainment loop type 2 of a repeated smile of PA
within the mimicry delay of 4 seconds.
We capture these two types of entrainment loop
and count the number of occurrence of entrainment
loops for each interaction.
4 CORPUS
We chose to use the NoXi database (Cafaro et al.,
2017). NoXi is a corpus of screen-mediated face-to-
face interactions. It contains natural dyadic conversa-
tions talking about a common topic. Each interacting
dyad consists of a pair of participants with two differ-
ent roles which are called expert and novice (Cafaro
et al., 2017). The expert is the one who transfers infor-
mation with the goal of sharing his/her knowledge on
a topic and thus who leads the conversation by talking
more frequently and for longer time. The novice (the
other interacting partner) receives the information and
responses to the sayings of the expert on the topic.
The NoXi database consists of 3 parts depend-
ing on the recording location (France, Germany, and
UK). For our work, we only use the recording from
the French location which consists of 21 dyadic in-
teractions performed by 28 participants with a total
duration of 7h22. We extract the intensity of Action
Unit 12 (AU12; zygomatic major) via the opensource
toolkit OpenFace (Baltrusaitis et al., 2018) and pre-
process it by performing median filter and linear in-
terpolation. In the remaining of this paper, we use the
term smile to refer to AU12; though we are aware that
smile may be produced by different Action Units (e.g.
AU11, AU13...) in combination of other Action Units
(such as AU6 or AU1, AU2) (Ekman and Friesen,
1982). To get the smile activation, we binarize the
continuous intensity value of smile with the thresh-
old of 1.5/5 which is the minimal intensity (manually
identified) for a smile activation.
5 STATISTICAL ANALYSIS &
DISCUSSION
Our reciprocal adaptation measures are computed
with activation state (binary activation values). At a
first step, we transformed the continuous smile inten-
sity (i.e. AU12) to smile activation with a threshold
of 1.5/5, 5 being the maximal intensity in OpenFace.
We found that the intensity 1.5 was the minimal in-
tensity for a smile which was manually identified. So,
a smile of intensity 1.5 corresponds to a small smile
while a smile of intensity 5 to a large one.
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
118
5.1 Smile Distribution
To start off, we wanted to visualize the distribution
of smiles in terms of its occurrence frequency and its
duration in our database depending on the person’s
role (expert or novice). We annotate the novice as P1
and the expert as P2.
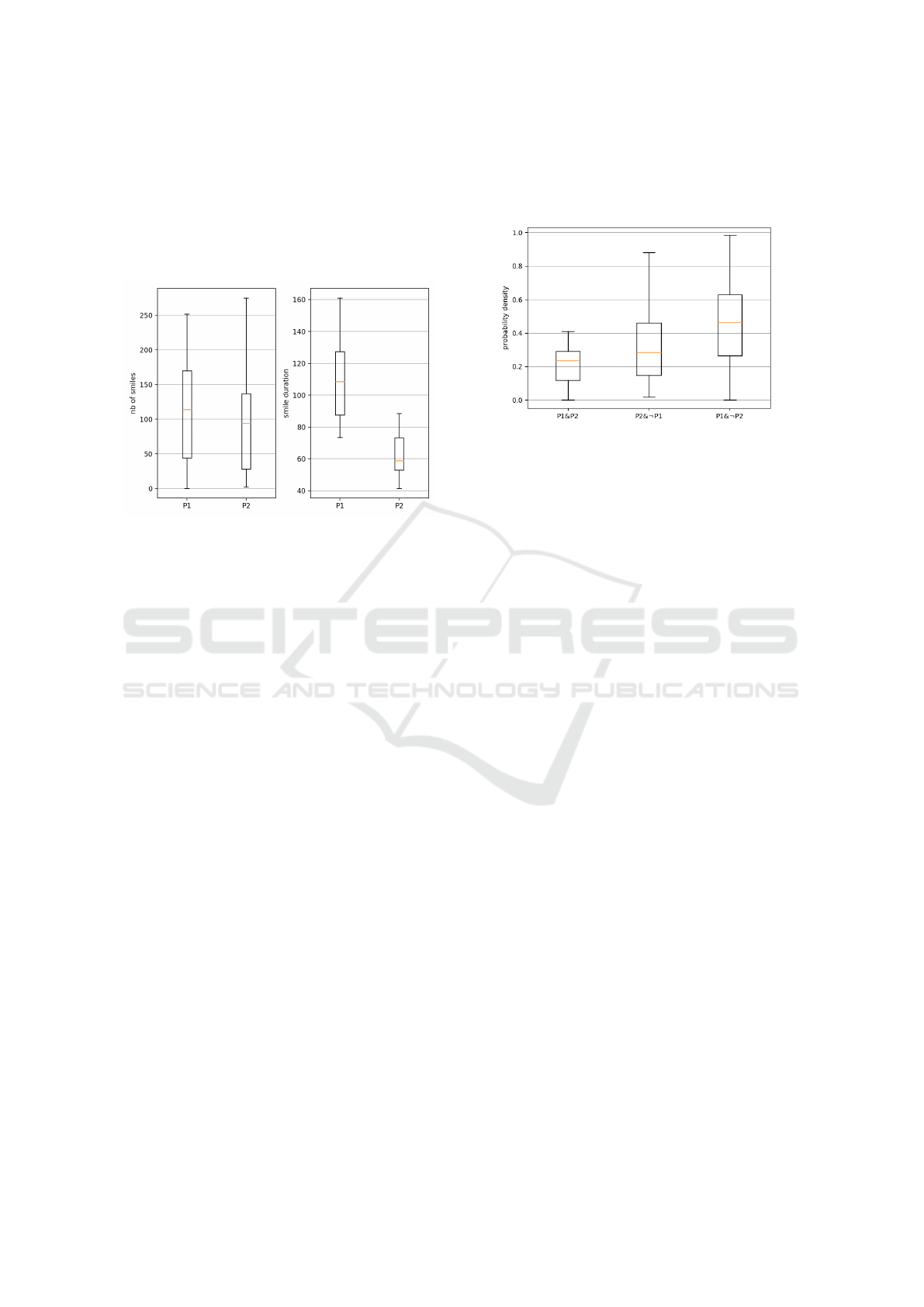
Figure 4: (left) Number of smiles produced by P1 and by
P2; (right) Smile durations of P1 and P2.
With the visualization of the smile occurrence dis-
tribution in Figure 4 (left), we note that P1 tends to
smile more often than P2. The context of the dyadic
interaction of the NoXi corpus is mainly friendly and
positive. Participants were paired between one that
wanted to talk about a topic and one that wanted to
learn about this topic (Cafaro et al., 2017). Within
such an interaction context, having P1 smiling more
than P2 can be explained by P1 displaying positive
backchannels or showing actively his/her involvement
when P2 is talking. Along with the number of smiles
produced by the participants, we also hold interest in
the smile duration distribution. Figure 4 (right) shows
that P1 generally maintains his/her smile longer than
P2. This can further support our analysis that P1’s
smiles may have the purpose of showing conversa-
tional involvement.
5.2 Synchrony Behaviors Including
Their Absence of Response
Going back to our initial objective of investigating the
reciprocal adaptation of smile and its relation with the
perception of social attitudes, we start by analyzing
the smile with our measures of synchrony behaviors
including their absence of response.
5.2.1 Smile Synchrony Distribution
We computed the probability densities, via our pro-
posed measures, to visualize the distribution of 3
cases: P1 and P2 responding to each other (P1&P2),
P2 smiling to P1 but not reversely (P2&¬P1), and P1
smiling to P2 but not reversely (P1&¬P2).
Figure 5: Probability density of smiles that are in sync
(P1&P2), P2 smiling without the response of P1 (P2&¬P1)
and P1 smiling without the response of P2 (P1&¬P2).
We can remark, in Figure 5, that during the con-
versation both P1 and P2 produce smiles that are in
sync responding to one another (smiling at the same
time or following back within the mimicry delay of
4 seconds) and also smiles that are not responded by
the other partner. As seen in Figure 4, P1 has a higher
probability density of smiling even during the absence
of the other interacting partner’s response (P1&¬P2),
because of his/her tendency to smile more than P2.
5.2.2 Synchrony Clustering
To better investigate the synchrony between the two
interlocutors, we decided to first check if the smile
synchrony of the 21 video dyads of the NoXi corpus
can be classified into different levels. We performed
a dendrogram hierarchical clustering to cluster the
dyads using our obtained measures of synchrony be-
haviors including their absence of response (P1&P2,
P2&¬P1, and P1&¬P2). As seen in Figure 6, we
split our data into three clusters by cutting the den-
drogram with a threshold of 1.0. The cluster classes
can be visualized in the 3-dimensional space of our
proposed measures in Figure 7.
In Figure 8, we can note that the synchronization
of level 1 (P1&P2 ∼ 0.072) occurs when P2 smiles
very frequently (P2&¬P1 ∼ 0.924) while P1 does
not smile much (P1&¬P2 ∼ 0.004). A level 2 syn-
chrony (P1&P2 ∼ 0.231) is seen when P1 smiles a lot
(P1&¬P2 ∼ 0.637) and P2 smiles a bit (P2&¬P1 ∼
0.146). For level 3 synchrony (P1&P2 ∼ 0.33), it
is observed when P1 and P2 both smile frequently
(P2&¬P1 ∼ 0.408 and P1&¬P2 ∼ 0.305).
We can deduce from these three levels that
the highest level of synchronization (level 3 where
Reciprocal Adaptation Measures for Human-Agent Interaction Evaluation
119
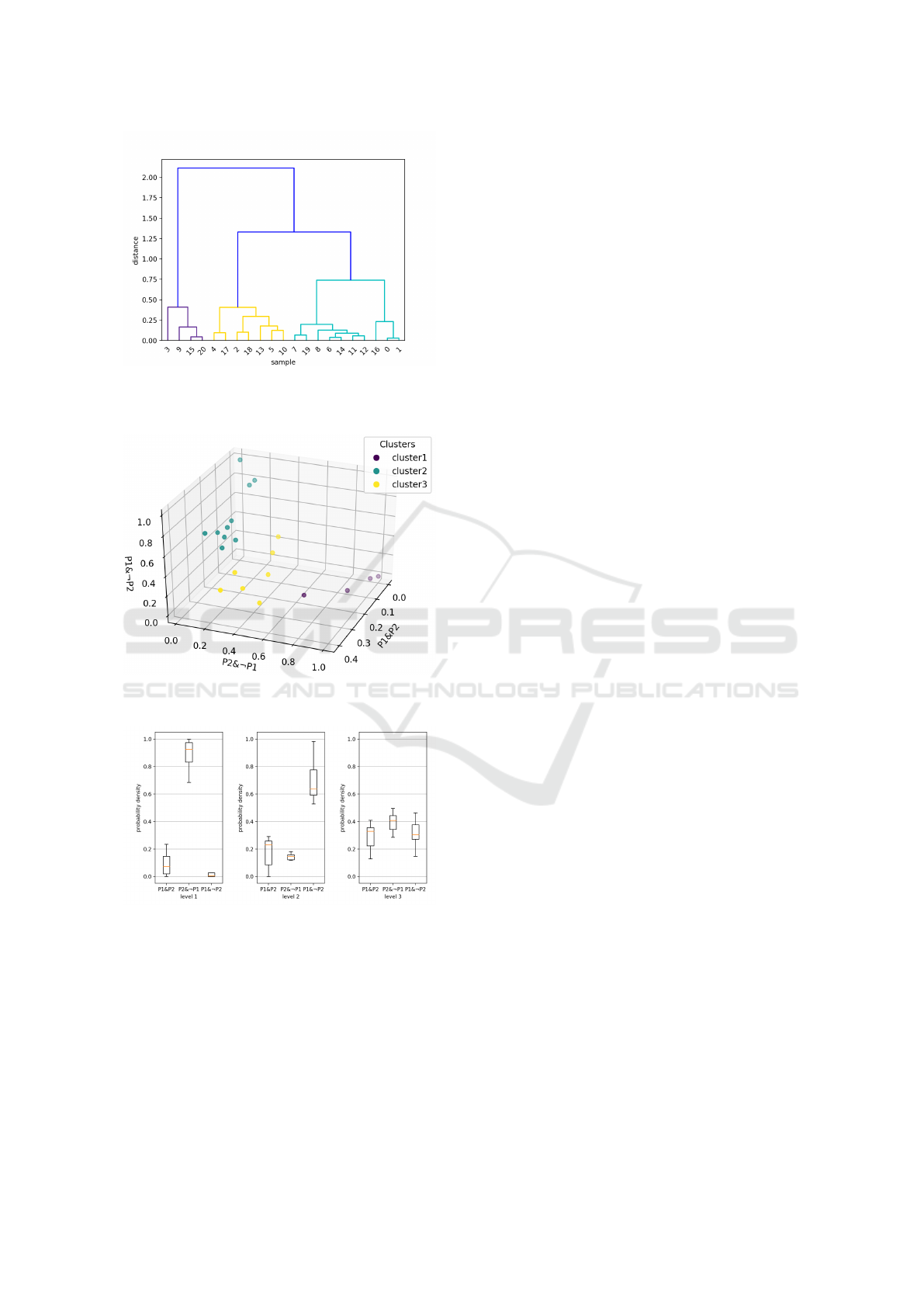
Figure 6: Dendrogram of synchrony measures where the
distance is the distance between the sample points in the 3D
space of our proposed measures of synchrony.
Figure 7: 3D visualization of the three synchrony classes
obtained using the dendrogram.
Figure 8: Probability density of smiles that are in sync
(P1&P2), or not (P2&¬P1 and P1&¬P2) for each class ob-
tained with the dendrogram: (left) level 1; (middle) level 2;
(right) level 3.
P1&P2 ∼ 0.33) is correlated with both interacting
partners who tend to smile frequently, while the lower
levels of synchronization, level 1 (P1&P2 ∼ 0.072)
and level 2 (P1&P2 ∼ 0.231), are correlated with
the situation when one of the partners, independent
of his/her role, does not respond much. This shows
how the presence of smile reciprocity is an important
factor with respect to synchrony level; a partner that
nearly does not respond to other’s smile (P1&¬P2 ∼
0.023 of level 1) deteriorates the synchrony of the
two even when the other interlocutor smiles a lot
(P2&¬P1 ∼ 0.924 of level 1). It confirms that syn-
chronization is highly dependent on coordination be-
tween partners (Burgoon et al., 1995; Tschacher et al.,
2014).
5.2.3 Relationship Between Synchrony and
Engagement & Social Attitudes
We also want to see if synchrony plays a role in
the perception of engagement and social attitudes of
warmth and competence. As we have previously
hypothesized, we expect a correlation between syn-
chrony and engagement levels (hypothesis 1), and
also for the social dimensions of warmth (hypothesis
2), and competence (hypothesis 3):
• Hypothesis 1: positive correlation between syn-
chrony (P1&P2) and engagement level,
• Hypothesis 2: positive correlation between syn-
chrony (P1&P2) and warmth level,
• Hypothesis 3: negative correlation between syn-
chrony (P1&P2) and competence level.
For the annotations, we base on previous works
done on the NoXi corpus (available with the anno-
tation tool NOVA (Heimerl et al., 2019)). For the
engagement annotations, the perception change of
engagement was characterized in (Dermouche and
Pelachaud, 2019) with five levels (0: strongly disen-
gaged; 1: partially disengaged; 2: neutral; 3: par-
tially engaged; 4: strongly engaged). In (Biancardi
et al., 2017), the continuous annotations of social di-
mensions of warmth and competence were done with
scores ranging from 0 to 1 (0: very low degree of per-
ceived warmth or competence; 1: very high degree of
warmth or competence). As the work of (Biancardi
et al., 2017) focuses on P2 (expert), we also evalu-
ate the impact of synchrony on the three aspects of
engagement, warmth, and competence of P2.
To test if our assumptions are correct, we will
observe the engagement and the social attitudes de-
pending on our measures of synchrony (P1&P2,
P2&¬P1, and P1&¬P2) and on the synchronization
levels (level 1, level 2, and level 3). The analysis was
done with two different methods to measure the en-
gagement and/or social attitudes.
The first method, method 1, consists of computing
the local average value of engagement and/or social
attitudes levels only on the segments where a smile
occurs, either on both participants’ faces (condition
P1&P2) or for just on one participant’s face (condi-
tion P2&¬P1 or P1&¬P2). A delay of 2 seconds is
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
120
applied considering the reaction lag of the evaluator,
as proposed in (Mariooryad and Busso, 2014)). We
then compute the mean of all the averaged values of
segments.
The second method, method 2, uses the global
average value of the engagement level (respectively
of the warmth and competence levels) over the en-
tire video of each dyad, independent of the smile syn-
chrony sequence. For this second method, as a single
value is computed for each entire video of the corpus,
we cannot use it to see the relationship that depends
on our measures of synchrony (P1&P2, P2&¬P1, and
P1&¬P2) as they derive from a single sample (i.e.
one smile occurrence).
So all in all, we evaluate the relationship between
synchrony and engagement (identically for both so-
cial attitudes) using three conditions:
• Condition 1: method 1 and averaged values of
segments belonging to (P1&P2, P2&¬P1, and
P1&¬P2),
• Condition 2: method 1 and averaged values of
segments belonging to synchrony levels 1, 2, and
3,
• Condition 3: method 2 for video dyad of syn-
chrony levels 1, 2, and 3.
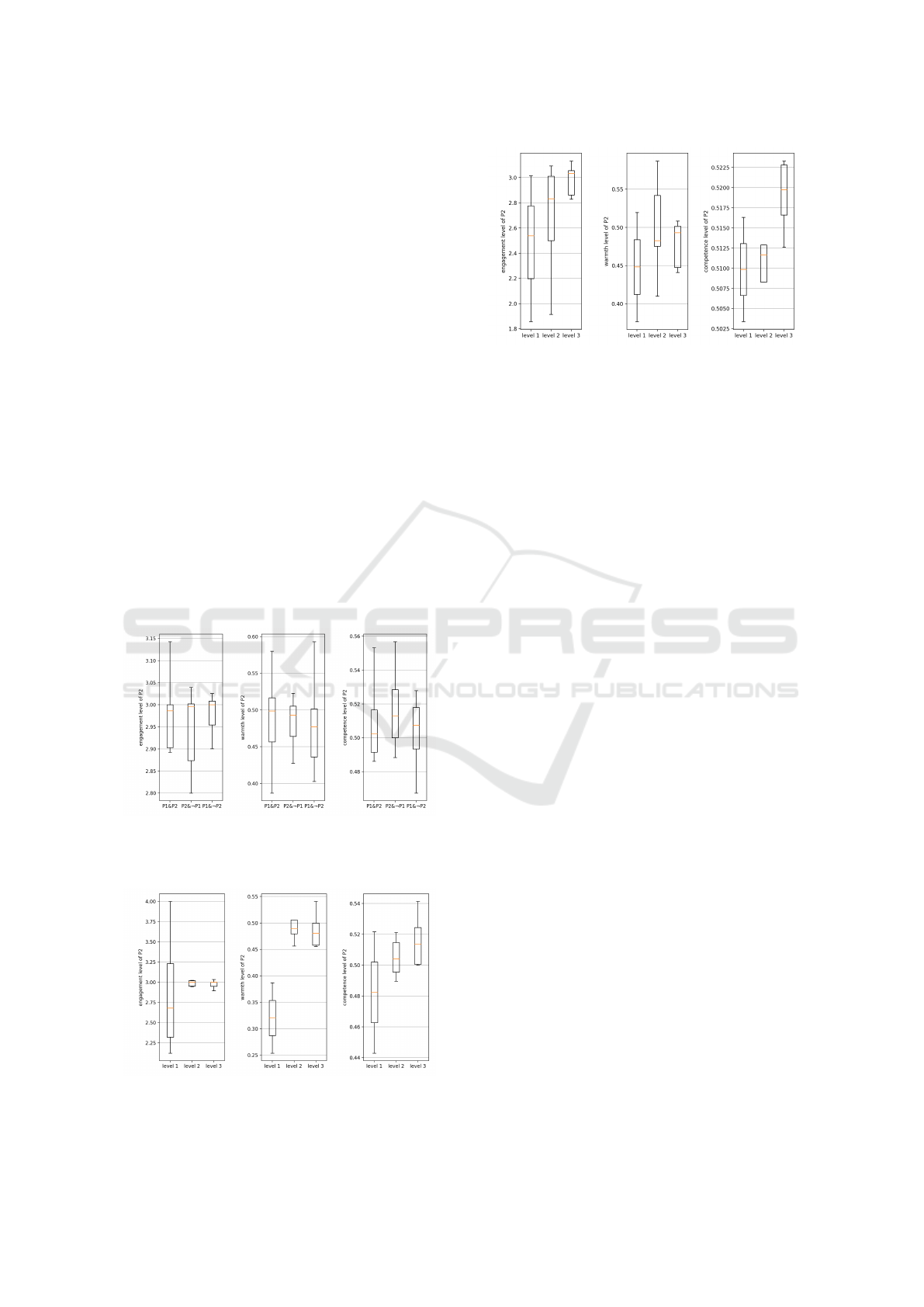
Figure 9: Distribution of engagement (left), warmth (cen-
ter), and competence (right) levels measured for condition
1.
Figure 10: Distribution of engagement (left), warmth (cen-
ter), and competence (right) levels measured for condition
2.
Figure 11: Distribution of engagement (left), warmth (cen-
ter), and competence (right) levels measured for condition
3.
For the engagement, we can see in Figure 9
(left) that similar levels of engagement are obtained
for P2 disregarding whether P1 and P2 are in sync
(P1&P2 ∼ 2.986) or not (P2&¬P1 ∼ 2.996 and
P1&¬P2 ∼ 3.0). When looking at the relationship
depending on the synchrony level, in Figure 10 (left)
we can observe that the level 1 (∼ 2.682) indicates a
lower engagement level compared to levels 2 and 3
(3.0 for both) and in Figure 11 (left) the proportional
relationship between engagement and synchrony level
is clearly shown (level 1 ∼ 2.538, level 2 ∼ 2.832,
and level 3 ∼ 3.033). Thus, we found a positive re-
lationship between engagement and synchrony levels.
Our analysis shows that the more engaged the partic-
ipants are the more they show behavior synchroniza-
tion (here smile of P1&P2). It validates our first hy-
pothesis. Condition 3 offers a clearer view. That is,
providing a global average value for the engagement
level better represents the characteristics of engage-
ment of participants in an interaction; only looking at
the short sequences of smiling moments is not suffi-
cient to capture the whole picture of the engagement.
The warmth dimension in Figure 9 (middle) shows
that when P1 and P2 are in sync (for their smile,
at least) P2 is perceived warmer (P1&P2 ∼ 0.499)
compared to when they are not in sync (P2&¬P1 ∼
0.493 and P1&¬P2 ∼ 0.477). P2 is also thought
to be warmer when he/she is the only one smil-
ing (P2&¬P1 ∼ 0.493) against the opposite situation
(P1&¬P2 ∼ 0.477; only P1 smiling). In Figure 10
(middle), the lower level of warmth at synchrony level
1 (∼ 0.32) is distinguishable from the higher levels
of warmth at synchrony levels 2 and 3 (∼ 0.49 and
∼ 0.481 respectively). When looking at Figure 11
(middle), we can see a rise in warmth level as the
synchrony level increases (level 1 ∼ 0.448, level 2
∼ 0.483, and level 3 ∼ 0.493). The results for warmth
tell us that being in synchrony with the other interact-
ing participant gives a warmer impression and that the
improvement of synchrony level (P1&P2) conducts
Reciprocal Adaptation Measures for Human-Agent Interaction Evaluation
121
the growth in warmth level which validates our hy-
pothesis 2. Moreover, the smiling tendency of the in-
terlocutor is linked to his/her impression of warmth
which is conformed with the literature that (genuine)
smiles are signals of warmth (Lau, 1982; Reis et al.,
1990).
In the case of the social trait of competence, we
can remark in Figure 9 (right) that P2 is perceived as
more competent when P2 is the only one smiling with
no smiling back from P1 (P2&¬P1 ∼ 0.513) followed
up by when P1 is smiling alone (P1&¬P2 ∼ 0.507)
and then by when P1 and P2 are in sync (P1&P2 ∼
0.502).
Previous researches (Bernstein et al., 2010; Bian-
cardi et al., 2017) have highlighted that a smiling per-
son is perceived as more affiliative and less domi-
nant. In the context of an interaction, the interplay
of participants’ behaviors modulates their perception.
In a study on behavior mimicry, Tiedens and Fra-
gale (Tiedens and Fragale, 2003) have reported that
when participants have different status (here in NoXi,
knowledgeable on a topic vs wanted to learn on this
topic), it seems to be correlated with complementar-
ity pattern rather than mimicry. In the NoXi corpus,
P2 acts as the ”expert” that conveys information on a
topic that P1 is interested to learn more about. Thus,
P2 has the role of a knowledgeable person on the topic
of discussion. It confers him/her a form of exper-
tise and thus of competence. In the context of the
NoXi corpus, when P2 displays a smile which is not
responded by a smile of P1, P2 appears to be more
competent than in the other smiling conditions. How-
ever, coordination of behaviors of both participants
appears to modulate this inference as reported in pre-
vious studies (Tiedens and Fragale, 2003). Further
studies involving other nonverbal signals (e.g. frown-
ing, sighting) need to be conducted to see if this con-
dition leads to complementarity.
In Figures 10 (right) and 11 (right), the increase
in synchronization level leads to the rise in the per-
ception of competence level. We could say that the
higher the synchronization the more the interlocutors
show involvement that gives a feeling of being more
proficient around the subject of discussion and thus
appearing more competent. This finding is against
our hypothesis 3, of synchrony (P1&P2) having an
indirect relationship with competence level. Instead
it follows previous literature work that saw the phe-
nomenon of smiling people being perceived as intelli-
gent and trustworthy (Lau, 1982; Scharlemann et al.,
2001). However, it is against our hypothesis with is
based on observation of Biancardi et al. and Cuddy
et al. (Biancardi et al., 2017; Cuddy et al., 2011) that
smiling behavior is negatively associated with compe-
tence. In our case, we remark a halo effect which oc-
curs when the judgments of an undescribed targeted
dimension (i.e. competence) goes towards the same
direction as the other given dimension (i.e. warmth).
Contrary to (Biancardi et al., 2017; Cuddy et al.,
2011)’s study that looks only at one person, in our
study we focus on the interaction and on how partic-
ipants in a dyad interact with each other. This could
explain the differences in our results and (Lau, 1982;
Scharlemann et al., 2001) and in (Biancardi et al.,
2017; Cuddy et al., 2011).
5.3 Entrainment Loop
We also want to observe the impact of entrainment
loop on the aspects of engagement and social dimen-
sions of warmth and competence.
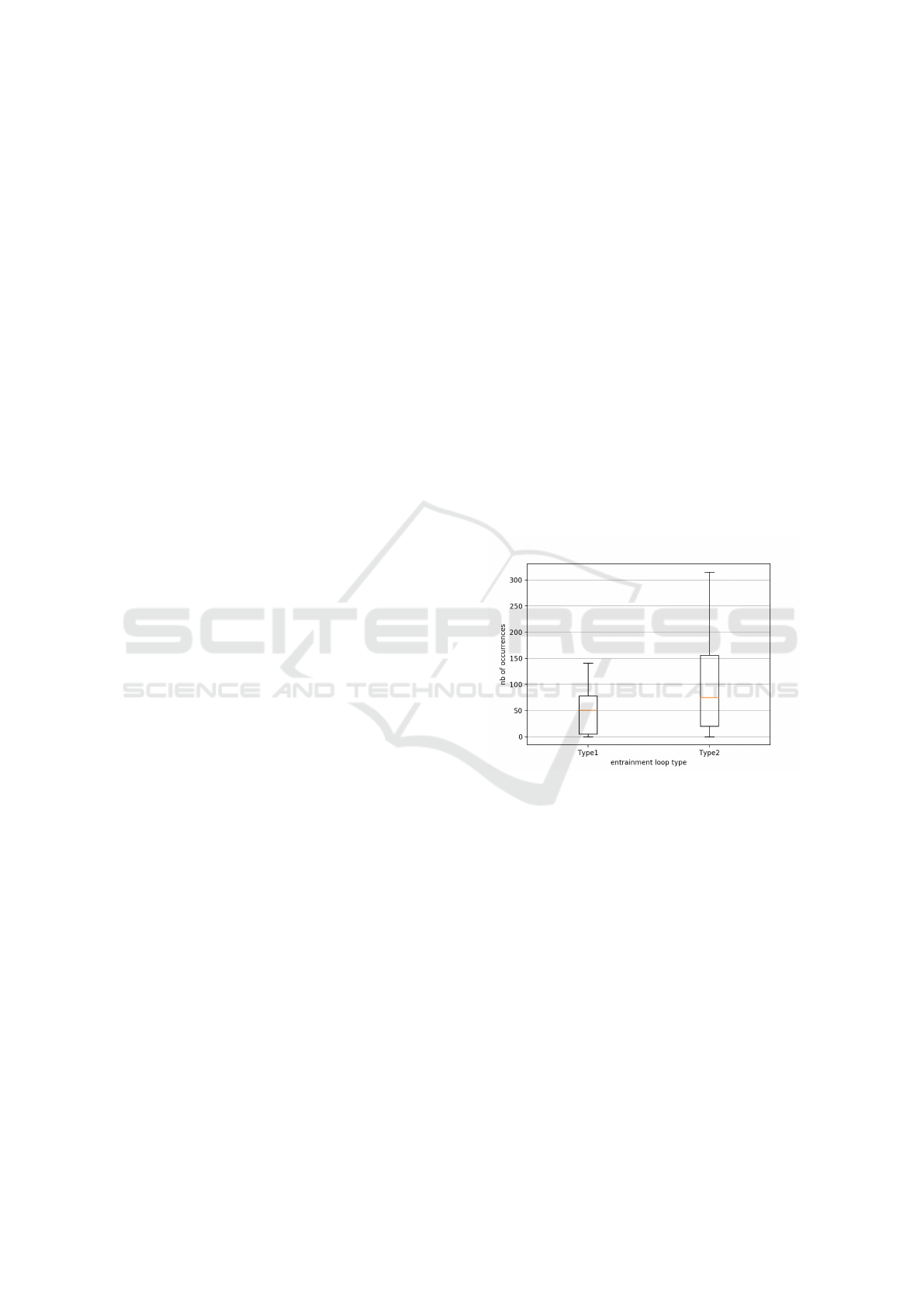
5.3.1 Types of Entrainment Loop
We firstly check the number of occurrence of the two
types of entrainment loop.
Figure 12: Number of occurrence of the two entrainment
loop types.
In Figure 12, we can notice that the two entrain-
ment loop types’ occurrence frequencies are not neg-
ligible. With this, we can state that both types should
be considered.
5.3.2 Relationship Between Entrainment Loop
and Engagement & Social Attitudes
As above, we observe the relationship of entrainment
loop with the aspects of engagement and social atti-
tudes via the aforementioned methods (using method
1: local average value or method 2: global average
value of the engagement, warmth and competence
levels). Before analyzing the relationships, we clus-
ter the interactions into two groups by splitting them
with the median number of occurrence of entrainment
loops.
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
122
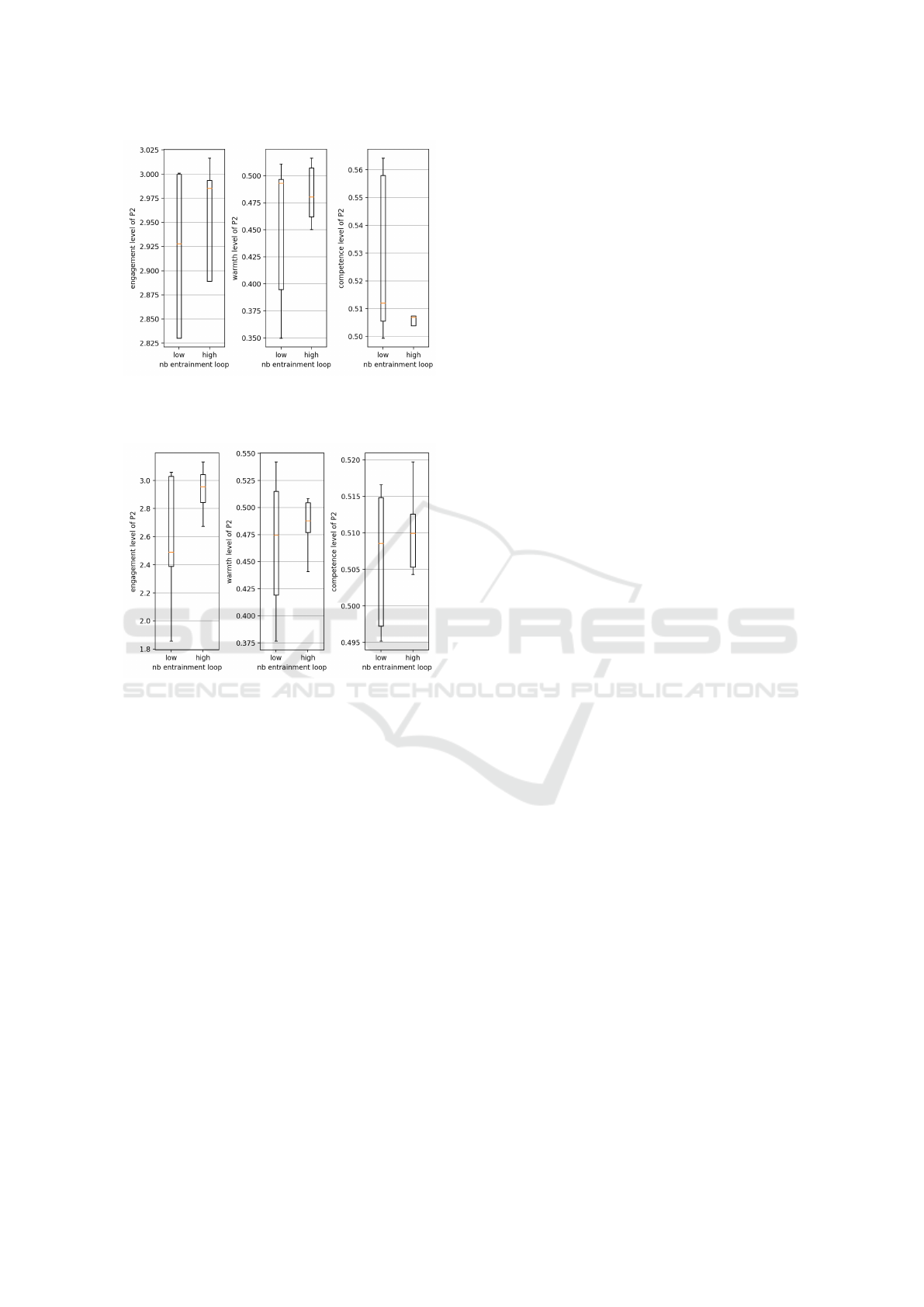
Figure 13: Distribution of engagement (left), warmth (cen-
ter), and competence (right) levels measured with method 1
(local average value) for entrainment loop.
Figure 14: Distribution of engagement (left), warmth (cen-
ter), and competence (right) levels measured with method 2
(global average value) for entrainment loop.
For the engagement, we can note that the engage-
ment level increases with respect to the number of en-
trainment loop occurrences for both method 1 (low ∼
2.490 and high ∼ 2.956) and method 2 (low ∼ 2.928
and high ∼ 2.985), in Figure 13 (left) and in Figure 14
(left) respectively.
For the social attitudes, when looking at them for
method 1, we can remark with their median values
that warmth and competence attitude levels decrease
(low ∼ 0.493 and high ∼ 0.480, and low ∼ 0.512 and
high ∼ 0.507 respectively) when entrainment loop oc-
currence transits from low to high. Nevertheless, for
both cases we can see that the class for high en-
trainment loop occurrence is more concentrated rang-
ing at a high warmth level (0.394 < low < 0.497
and 0.462 < high < 0.508) and low competence level
(0.505 < low < 0.558 and 0.503 < high < 0.508).
Thus, we can state that at the moment of the entrain-
ment, the warmth level rises and the competence level
decreases which is inline with the findings of (Bian-
cardi et al., 2017; Cuddy et al., 2011).
For method 2, both warmth and competence levels
increase (low ∼ 0.475 and high ∼ 0.488, and low ∼
0.509 and high ∼ 0.510 respectively). However, no
significance can be found for competence, thus val-
idating only for warmth level to be correlated to the
number of entrainment loops.
6 CONCLUSION AND
DISCUSSION
As reciprocal adaptation occurs naturally as we con-
verse, it generally passes unnoticed without giving
any explicit attention towards it. Nevertheless, this
aspect of reciprocal adaptation, and particularly inter-
personal synchronization and entrainment loop, is an
important factor for an interactive and engaging com-
munication. With our new reciprocal adaptation eval-
uation measures, that assess synchrony behaviors in-
cluding their response absences and measures entrain-
ment loop, we were able to carry out several statisti-
cal analyses on smile synchrony distribution, cluster-
ing synchronization levels (level 1, level 2, and level
3) and the relationship with engagement and social
dimensions (warmth and competence). Also, we ob-
served the relation between entrainment loop occur-
rences and engagement and social dimensions.
We validated our hypotheses of observing a pos-
itive correlation between synchrony and entrainment
loop with engagement and warmth, while we see an
halo effect for competence. Thus, we can say that
reciprocal adaptation, which is assessed via our mea-
sures, also has a direct relation with engagement and
warmth.
Our reciprocal adaptation measures (three syn-
chrony measures and entrainment loop measure) can
be used to evaluate if the agent produced human-like
behaviors with reciprocal adaptation for a human-
agent interaction. This can be done by comparing
the values obtained by the human-agent interaction
against those obtained from human-human interac-
tion. To detail, the human-agent interaction qual-
ity can be assessed by checking if the results of the
agent, obtained via our reciprocal adaptation mea-
sures, show similar distributions with those of the real
human-human interaction for both synchrony behav-
iors including their absence of response and behavior
entrainment loop.
We are currently developing a predictive model of
conversational agents with reciprocal behavior adap-
tation capability learned on human-human dyadic in-
teraction. In the next future, we plan to use our recip-
rocal adaptation measures to objectively validate the
Reciprocal Adaptation Measures for Human-Agent Interaction Evaluation
123

generated agent’s behaviors obtained from our predic-
tive models to assess the quality of the interaction and
the perception of the agent.
REFERENCES
Ashenfelter, K. T., Boker, S. M., Waddell, J. R., and Vi-
tanov, N. (2009). Spatiotemporal symmetry and mul-
tifractal structure of head movements during dyadic
conversation. Journal of Experimental Psychology:
Human Perception and Performance, 35(4):1072.
Bakhshayesh, H., Fitzgibbon, S. P., Janani, A. S., Grum-
mett, T. S., and Pope, K. J. (2019). Detecting syn-
chrony in eeg: A comparative study of functional
connectivity measures. Computers in biology and
medicine, 105:1–15.
Baltrusaitis, T., Zadeh, A., Lim, Y. C., and Morency, L.-
P. (2018). Openface 2.0: Facial behavior analysis
toolkit. In 2018 13th IEEE international conference
on automatic face & gesture recognition (FG 2018),
pages 59–66. IEEE.
Be
ˇ
nu
ˇ
s,
ˇ
S., Gravano, A., and Hirschberg, J. (2011). Prag-
matic aspects of temporal accommodation in turn-
taking. Journal of Pragmatics, 43(12):3001–3027.
Bernieri, F. J., Reznick, J. S., and Rosenthal, R.
(1988). Synchrony, pseudosynchrony, and dissyn-
chrony: measuring the entrainment process in mother-
infant interactions. Journal of personality and social
psychology, 54(2):243.
Bernieri, F. J. and Rosenthal, R. (1991). Interpersonal co-
ordination: Behavior matching and interactional syn-
chrony.
Bernstein, M. J., Sacco, D. F., Brown, C. M., Young, S. G.,
and Claypool, H. M. (2010). A preference for genuine
smiles following social exclusion. Journal of experi-
mental social psychology, 46(1):196–199.
Biancardi, B., Cafaro, A., and Pelachaud, C. (2017). An-
alyzing first impressions of warmth and competence
from observable nonverbal cues in expert-novice in-
teractions. In Proceedings of the 19th acm interna-
tional conference on multimodal interaction, pages
341–349.
Boker, S. M., Rotondo, J. L., Xu, M., and King, K. (2002).
Windowed cross-correlation and peak picking for the
analysis of variability in the association between be-
havioral time series. Psychological methods, 7(3):338.
Burgoon, J. K., Stern, L. A., and Dillman, L. (1995). In-
terpersonal adaptation: Dyadic interaction patterns.
Cambridge University Press.
Cafaro, A., Wagner, J., Baur, T., Dermouche, S., Torres Tor-
res, M., Pelachaud, C., Andr
´
e, E., and Valstar, M.
(2017). The noxi database: multimodal recordings of
mediated novice-expert interactions. In Proceedings
of the 19th ACM International Conference on Multi-
modal Interaction, pages 350–359.
Campbell, N. (2008). Multimodal processing of discourse
information; the effect of synchrony. In 2008 Second
International Symposium on Universal Communica-
tion, pages 12–15. IEEE.
Cappella, J. N. (1997). Behavioral and judged coordina-
tion in adult informal social interactions: Vocal and
kinesic indicators. Journal of personality and social
psychology, 72(1):119.
Chang, W. I. and Lawler, E. L. (1994). Sublinear approxi-
mate string matching and biological applications. Al-
gorithmica, 12(4):327–344.
Chartrand, T. L. and Bargh, J. A. (1999). The chameleon
effect: the perception–behavior link and social inter-
action. Journal of personality and social psychology,
76(6):893.
Chartrand, T. L. and Lakin, J. L. (2013). The antecedents
and consequences of human behavioral mimicry. An-
nual review of psychology, 64:285–308.
Condon, W. S. and Ogston, W. D. (1966). Sound film
analysis of normal and pathological behavior patterns.
Journal of nervous and mental disease.
Condon, W. S. and Ogston, W. D. (1967). A segmen-
tation of behavior. Journal of psychiatric research,
5(3):221–235.
Condon, W. S. and Sander, L. W. (1974). Neonate move-
ment is synchronized with adult speech: Interac-
tional participation and language acquisition. Science,
183(4120):99–101.
Cuddy, A. J., Glick, P., and Beninger, A. (2011). The dy-
namics of warmth and competence judgments, and
their outcomes in organizations. Research in orga-
nizational behavior, 31:73–98.
Delaherche, E. and Chetouani, M. (2010). Multimodal co-
ordination: exploring relevant features and measures.
In Proceedings of the 2nd international workshop on
Social signal processing, pages 47–52.
Delaherche, E., Chetouani, M., Mahdhaoui, A., Saint-
Georges, C., Viaux, S., and Cohen, D. (2012). In-
terpersonal synchrony: A survey of evaluation meth-
ods across disciplines. IEEE Transactions on Affective
Computing, 3(3):349–365.
Dermouche, S. and Pelachaud, C. (2019). Engagement
modeling in dyadic interaction. In 2019 interna-
tional conference on multimodal interaction, pages
440–445.
Ekman, P. (1992). An argument for basic emotions. Cogni-
tion & emotion, 6(3-4):169–200.
Ekman, P. and Friesen, W. (1982). Felt, false, miserable
smiles. Journal of Nonverbal Behavior, 6(4):238–251.
Hale, J., Ward, J. A., Buccheri, F., Oliver, D., and Hamilton,
A. F. d. C. (2020). Are you on my wavelength? inter-
personal coordination in dyadic conversations. Jour-
nal of nonverbal behavior, 44(1):63–83.
Heimerl, A., Baur, T., Lingenfelser, F., Wagner, J., and
Andr
´
e, E. (2019). Nova - a tool for explainable co-
operative machine learning. In 2019 8th International
Conference on Affective Computing and Intelligent
Interaction (ACII), 3-6 September 2019, Cambridge,
UK, pages 109 – 115.
Hess, U., Beaupr
´
e, M. G., Cheung, N., et al. (2002). Who
to whom and why–cultural differences and similarities
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
124

in the function of smiles. An empirical reflection on
the smile, 4:187.
Hess, U., Houde, S., and Fischer, A. (2014). Do we mimic
what we see or what we know. pages 94–107.
Hove, M. J. and Risen, J. L. (2009). It’s all in the timing:
Interpersonal synchrony increases affiliation. Social
cognition, 27(6):949–960.
Knapp, M. L., Hall, J. A., and Horgan, T. G. (2013). Non-
verbal communication in human interaction. Cengage
Learning.
Lau, S. (1982). The effect of smiling on person perception.
The Journal of social psychology, 117(1):63–67.
Leander, N. P., Chartrand, T. L., and Bargh, J. A. (2012).
You give me the chills: Embodied reactions to inap-
propriate amounts of behavioral mimicry. Psycholog-
ical science, 23(7):772–779.
Lhoussain, A. S., Hicham, G., and Abdellah, Y. (2015).
Adaptating the levenshtein distance to contextual
spelling correction. International Journal of Com-
puter Science and Applications, 12(1):127–133.
Mariooryad, S. and Busso, C. (2014). Correcting time-
continuous emotional labels by modeling the reac-
tion lag of evaluators. IEEE Transactions on Affective
Computing, 6(2):97–108.
M
¨
uller, M. (2007). Dynamic time warping. Information
retrieval for music and motion, pages 69–84.
Navarro, G. (2001). A guided tour to approximate
string matching. ACM computing surveys (CSUR),
33(1):31–88.
Niedenthal, P. M., Mermillod, M., Maringer, M., and Hess,
U. (2010). The simulation of smiles (sims) model:
Embodied simulation and the meaning of facial ex-
pression.
Ochs, M. and Pelachaud, C. (2013). Socially aware virtual
characters: The social signal of smiles. IEEE Signal
Processing Magazine, 30(2):128–132.
Oullier, O., De Guzman, G. C., Jantzen, K. J., Lagarde, J.,
and Scott Kelso, J. (2008). Social coordination dy-
namics: Measuring human bonding. Social neuro-
science, 3(2):178–192.
Pickering, M. J. and Garrod, S. (2004). Toward a mecha-
nistic psychology of dialogue. Behavioral and brain
sciences, 27(2):169–190.
Prepin, K. and Pelachaud, C. (2011). Basics of intersub-
jectivity dynamics: Model of synchrony emergence
when dialogue partners understand each other. In In-
ternational Conference on Agents and Artificial Intel-
ligence, pages 302–318. Springer.
Rauzy, S., Amoyal, M., and Priego-Valverde, B. (2022).
A measure of the smiling synchrony in the conversa-
tional face-to-face interaction corpus paco-cheese. In
Workshop SmiLa, Language Resources and Evalua-
tion Conference, LREC 2022.
Reidsma, D., Nijholt, A., Tschacher, W., and Ramseyer, F.
(2010). Measuring multimodal synchrony for human-
computer interaction. In 2010 international confer-
ence on cyberworlds, pages 67–71. IEEE.
Reis, H. T., Wilson, I. M., Monestere, C., Bernstein, S.,
Clark, K., Seidl, E., Franco, M., Gioioso, E., Free-
man, L., and Radoane, K. (1990). What is smiling is
beautiful and good. European Journal of Social Psy-
chology, 20(3):259–267.
Richardson, M. J., Marsh, K. L., Isenhower, R. W., Good-
man, J. R., and Schmidt, R. C. (2007). Rocking to-
gether: Dynamics of intentional and unintentional in-
terpersonal coordination. Human movement science,
26(6):867–891.
Scharlemann, J. P., Eckel, C. C., Kacelnik, A., and Wil-
son, R. K. (2001). The value of a smile: Game theory
with a human face. Journal of Economic Psychology,
22(5):617–640.
Schmidt, R. C. and Richardson, M. J. (2008). Dynamics
of interpersonal coordination. In Coordination: Neu-
ral, behavioral and social dynamics, pages 281–308.
Springer.
Shockley, K., Santana, M.-V., and Fowler, C. A. (2003).
Mutual interpersonal postural constraints are involved
in cooperative conversation. Journal of Experimen-
tal Psychology: Human Perception and Performance,
29(2):326.
Tiedens, L. Z. and Fragale, A. R. (2003). Power moves:
complementarity in dominant and submissive nonver-
bal behavior. Journal of personality and social psy-
chology, 84(3):558.
Tschacher, W., Rees, G. M., and Ramseyer, F. (2014). Non-
verbal synchrony and affect in dyadic interactions.
Frontiers in psychology, 5:1323.
Varni, G., Volpe, G., and Camurri, A. (2010). A system for
real-time multimodal analysis of nonverbal affective
social interaction in user-centric media. IEEE Trans-
actions on Multimedia, 12(6):576–590.
Wang, I. and Ruiz, J. (2021). Examining the use of
nonverbal communication in virtual agents. Inter-
national Journal of Human–Computer Interaction,
37(17):1648–1673.
Reciprocal Adaptation Measures for Human-Agent Interaction Evaluation
125
