
How to Find Good Coalitions to Achieve Strategic Objectives
Angelo Ferrando
1 a
and Vadim Malvone
2 b
1
Department of Informatics, Bioengineering, Robotics and Systems Engineering, University of Genoa, Genoa, Italy
2
LTCI, Telecom Paris, Institut Polytechnique de Paris, Palaiseau, France
Keywords:
Logics for the Strategic Reasoning, Alternating-Time Temporal Logic, Coalition of Agents, Formal
Verification.
Abstract:
Alternating-time Temporal Logic (ATL) is an extension of the temporal logic CTL in which we can quantify
over coalition of agents. In the model checking process, the coalitions in a given formula are fixed, so it is
assumed that the user knows the specific coalitions to be checked. Unfortunately, this is not true in general.
In this paper, we present an extension of MCMAS, a well-known tool that handles ATL model checking, in
which we give the ability to a user to characterise the coalition quantifiers with respect to two main features:
the number of agents involved in the coalitions and how to group such agents. Moreover, we give details of
such extensions and provide experimental results.
1 INTRODUCTION
Given the growing use of concurrent and reactive
systems, formal verification for Multi-Agent Systems
(MAS) becomes a fundamental task. The main con-
tribution in this line of research is model checking.
The latter is divided into three main goals: model the
multi-agent system, specify the property of interest,
and verify that the model satisfies the specification.
To handle the second task in the model checking pro-
cess, logics for the strategic reasoning have been pro-
posed (Alur et al., 2002; Mogavero et al., 2014). One
of the most popular logics for the strategic reason-
ing is Alternating-time temporal logic (ATL) (Alur
et al., 2002). The latter is an extension of Compu-
tation Tree Logic (CTL) in which instead of having
path quantifiers “there exists a path” E and “for all
paths” A, we have strategic operators “there exists a
collective strategy for the coalition A” hhAii and “for
all the strategies for the coalition A” [[A ]]. The most
popular tool for the model checking of multi-agent
systems is MCMAS (Lomuscio et al., 2015). In this
tool, the multi-agent system is formally modelled as
an interpreted system that is a product of local mod-
els, one for each agent involved in the multi-agent sys-
tem to represent its visibility. MCMAS provides the
specification of properties via CTL, ATL (Alur et al.,
2002), Strategy Logic (Mogavero et al., 2014), and
some of their extensions/fragments. The tool handles
a
https://orcid.org/0000-0002-8711-4670
b
https://orcid.org/0000-0001-6138-4229
the model checking problem by using a Binary Deci-
sion Diagram (BDD) representation for models and
formulas. Notice that, in the model checking pro-
cess the coalitions in the strategic operators need to
be fixed before the verification process. The latter
constraint is not always well-known by the develop-
ers/users called to verify the multi-agent system.
In this paper, we present an extension of MCMAS
in which we give the ability to the end user to char-
acterise the coalitions in the strategy quantifiers with
respect to two main features: the number of agents in-
volved in the coalitions and how to group the agents.
That is, we ask the user to give some information
on the coalitions involved in each strategic operator
by considering them as a variable of the problem.
With more detail, the user can input a minimum and
maximum of agents involved in the coalitions and
give guidelines with respect to the agents that have
to (resp., cannot) stay in the same coalitions. After
that, our tool extracts all coalitions of agents that re-
spect the user’s guidelines. Then, for each valid coali-
tion, our tool verifies the formal specification over the
multi-agent system. Finally, the coalitions that make
the formal specification satisfied in the multi-agent
system are returned to the user. We consider our work
as a first stone on the development of a more gener-
alised tool for the verification of multi-agent systems.
The paper is structured as follows. In Section 2
we give some related works on formal verification of
multi-agent systems. In Section 3 we recall the for-
mal definitions to model multi-agent systems as in-
terpreted systems and to specify ATL properties. We
Ferrando, A. and Malvone, V.
How to Find Good Coalitions to Achieve Strategic Objectives.
DOI: 10.5220/0011778700003393
In Proceedings of the 15th International Conference on Agents and Artificial Intelligence (ICAART 2023) - Volume 1, pages 105-113
ISBN: 978-989-758-623-1; ISSN: 2184-433X
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
105

present a variant of the Train Gate Controller in Sec-
tion 4. Then, in Section 5 we provide details on our
idea and methodology. Finally, we give the details
on our extension for MCMAS in Section 6 and, in
Section 7, provide experimental results on a parame-
terised version of the Train Gate Controller Scenario.
We conclude in Section 8 by recapping our work and
open to some interesting future works.
2 RELATED WORK
In the introduction we mentioned another important
logic for the strategic reasoning called Strategy Logic
(Mogavero et al., 2014). The latter is a powerful for-
malism for strategic reasoning. As a key aspect, this
logic treats strategies as first-order objects that can be
determined by means of the existential ∃x and uni-
versal ∀x quantifiers, which can be respectively read
as “there exists a strategy x” and “for all strategies
x”. In logics for the strategic reasoning two key no-
tions are the kind of strategies and the agents’ in-
formation. A strategy is a generic conditional plan
that at each step of the game prescribes an action.
With more detail, there are two main classes of strate-
gies: memoryless and memoryful. In the former case,
agents choose an action by considering only the cur-
rent game state while, in the latter case, agents choose
an action by considering the full history of the game.
Therefore, in Strategy Logic, this plan is not intrinsi-
cally glued to a specific agent, but an explicit bind-
ing operator (a,x) allows to link an agent a to the
strategy associated with a variable x. Unfortunately,
the high expressivity of SL comes at a price. Indeed,
it has been proved that the model-checking problem
for SL becomes non-elementary complete (Mogavero
et al., 2014) and the satisfiability undecidable (Mo-
gavero et al., 2017). To gain back elementariness, sev-
eral fragments of SL have been considered. Among
the others, Strategy Logic with Simple-Goals (Belar-
dinelli et al., 2019a) considers SL formulas in which
strategic operators, bindings operators, and temporal
operators are coupled. It has been shown that Strat-
egy Logic with Simple-Goals strictly subsume ATL
and its model checking problem is P-COMPLETE, as
it is for ATL (Alur et al., 2002). To conclude this
section, we want to focus on the agents’ information.
Specifically, we distinguish between perfect and im-
perfect information games (Reif, 1984). The former
corresponds to a basic setting in which every agent
has full knowledge about the game. However, in real-
life scenarios it is common to have situations in which
agents have to play without having all relevant in-
formation at hand. In computer science these situ-
ations occur for example when some variables of a
system are internal/private and not visible to an exter-
nal environment (Kupferman and Vardi, 1997; Bloem
et al., 2015). In game models, the imperfect informa-
tion is usually modelled by setting an indistinguisha-
bility relation over the states of the game (Kupfer-
man and Vardi, 1997; Reif, 1984; Pnueli and Ros-
ner, 1990). This feature deeply impacts on the model
checking complexity. For example, ATL becomes
undecidable in the context of imperfect information
and memoryful strategies (Dima and Tiplea, 2011).
To overcome this problem, some works have either
focused on an approximation to perfect information
(Belardinelli et al., 2019b; Belardinelli and Malvone,
2020), developed notions of bounded memory (Be-
lardinelli et al., 2018; Belardinelli et al., 2022), or
developed hybrid techniques (Ferrando and Malvone,
2021b; Ferrando and Malvone, 2021a; Ferrando and
Malvone, 2022).
3 PRELIMINARIES
In this section we show the syntax and semantics
for ATL
∗
based on (Alur et al., 2002) by using in-
terpreted systems as models. Hereafter we assume
sets Ag = {1,...,m} of indices for agents and AP of
atomic propositions. Given a set U, U denotes its
complement. We denote the length of a tuple v of
elements as |v|, and its ith element either as v
i
. Then,
let last(v) = v
|v|
be the last element in v. For i ≤ |v|,
let v
≥i
be the suffix v
i
,...,v
|v|
of v starting at v
i
and
v
≤i
the (finite) prefix v
1
,...,v
i
of v starting at v
1
.
3.1 Interpreted Systems
We follow the presentation of interpreted systems as
given by (Fagin et al., 1995). We will use them as a
semantics for ATL
∗
as originally put forward by (Lo-
muscio and Raimondi, 2006), rather than concurrent
game structures. Nonetheless, the two accounts are
closely related (Goranko and Jamroga, 2004).
Definition 1 (Agent). Given a set Ag of indices for
agents, an agent is a tuple i = hL
i
,Act
i
,P
i
,t
i
i such that
• L
i
is the finite set of local states;
• Act
i
is the finite set of individual actions;
• P
i
: L
i
→ (2
Act
i
\
/
0) is the protocol function;
• t
i
: L
i
× ACT → L
i
is the local transition function,
where ACT = Act
1
×· · · × Act
|Ag|
is the set of joint
actions, such that for every l ∈ L
i
, a ∈ ACT , t
i
(l, a)
is defined iff a
i
∈ P
i
(l).
By Def. 1 an agent i is situated in some local state
l ∈ L
i
, which represents the information she has about
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
106

(M,s) |= q iff Π(s,q) = tt
(M,s) |= ¬ϕ iff (M,s) 6|= ϕ
(M,s) |= ϕ ∧ ϕ
0
iff (M,s) |= ϕ and (M,s) |= ϕ
0
(M,s) |= hhΓiiψ iff for some joint strategy F
Γ
, for all paths p ∈ out(s,F
Γ
), (M, p) |= ψ
(M, p) |= ϕ iff (M, p
1
) |= ϕ
(M, p) |= ¬ψ iff (M, p) 6|= ψ
(M, p) |= ψ ∧ ψ
0
iff (M, p) |= ψ and (M, p) |= ψ
0
(M, p) |= Xψ iff (M, p
≥2
) |= ψ
(M, p) |= ψUψ
0
iff for some k ≥ 1, (M, p
≥k
) |= ψ
0
, and for all j, 1 ≤ j < k implies (M, p
≥ j
) |= ψ
Figure 1: Semantics of ATL*.
the current state of the system. At any state she can
perform the actions in Act
i
according to protocol P
i
.
A joint action brings about a change in the state of
the agent, according to the local transition function t
i
.
Hereafter, with an abuse of notation, we identify an
agent index i with the corresponding agent.
Given set Ag of agents, a global state s ∈ G is a
tuple hl
1
,. .. , l
|Ag|
i of local states, one for each agent
in Ag. Notice that an agent’s protocol and transition
function depend only on her local state, which might
contain strictly less information than the global state.
In this sense agents have imperfect information about
the system. A history h ∈ G
+
is a finite (non-empty)
sequence of global states.
For every agent i ∈ Ag, we define an indistin-
guishability relation ∼
i
between global states based
on the identity of local states, that is, s ∼
i
s
0
iff s
i
= s
0
i
(Fagin et al., 1995). This indistinguishability relation
is extended to histories in a synchronous, pointwise
way, that is, histories h, h
0
∈ G
+
are indistinguishable
for agent i ∈ Ag, or h ∼
i
h
0
, iff (i) |h| = |h
0
| and (ii) for
every j ≤ |h|, h
j
∼
i
h
0
j
.
Definition 2 (IS). An interpreted system is a tuple
M = hAg,s
0
,T, Πi, where
• Ag is the set of agents;
• s
0
∈ G is the (global) initial state;
• T : G ×ACT → G is the global transition function
such that s
0
= T (s,a) iff for every i ∈ Ag, s
0
i
=
t
i
(s
i
,a);
• Π : G × AP → {tt,ff} is the labelling function.
Intuitively, an interpreted system describes the in-
teractions of a group Ag of agents, starting from the
initial state s
0
, according to the transition function T .
Notice that T is defined on state s for joint action a iff
a
i
∈ P
i
(s
i
) for every i ∈ Ag.
3.2 ATL
We make use of the Alternating-time Temporal Logic
AT L
∗
(Alur et al., 2002) to reason about the strategic
abilities of agents in interpreted systems.
Definition 3 (AT L
∗
). State (ϕ) and path (ψ) formulas
in AT L
∗
are defined as follows:
ϕ ::= q | ¬ϕ | ϕ ∧ ϕ | hhΓiiψ
ψ ::= ϕ | ¬ψ | ψ ∧ ψ | Xψ | (ψUψ)
where q ∈ AP and Γ ⊆ Ag. Formulas in AT L
∗
are all
and only the state formulas.
As customary, a formula hhΓiiψ is read as ‘the
agents in coalition Γ have a strategy to achieve goal
ψ’. The meaning of LT L operators ‘next’ X and ‘un-
til’ U is standard (Baier and Katoen, 2008). Operators
‘unavoidable’ [[Γ]], ‘eventually’ F, and ‘always’ G can
be introduced as usual.
Formulas in the AT L fragment of ATL
∗
are ob-
tained from Def. 3 by restricting path formulas ψ as
follows:
ψ ::= Xϕ | (ϕUϕ) | (ϕRϕ)
where ϕ is a state formula and R is the release opera-
tor
1
.
Since the behaviour of agents in interpreted sys-
tems depends only on their local state, we as-
sume agents employ uniform strategies (Jamroga and
van der Hoek, 2004). That is, they perform the same
action whenever they have the same information. This
is formalised as follows.
Definition 4 (Uniform Strategy). A uniform strategy
for agent i ∈ Ag is a function f
i
: G
+
→ Act
i
such that
for all histories h, h
0
∈ G
+
, (i) f
i
(h) ∈ P
i
(last(h)
i
); and
(ii) h ∼
i
h
0
implies f
i
(h) = f
i
(h
0
).
By Def. 4 any strategy for agent i has to return ac-
tions that are enabled for i. Also, whenever two his-
tories are indistinguishable for agent i, then the same
action is returned.
Given an IS M, a path p is an infinite sequence
s
1
s
2
.. . of global states. For a set F
Γ
= { f
i
| i ∈ Γ} of
1
Notice that the release operator R can be defined in
AT L
∗
as the dual of until U (indeed, it does not appear in the
syntax of Def. 3), while it must be assumed as a primitive
operator in AT L. We refer to (Laroussinie et al., 2008) for
more details on this point.
How to Find Good Coalitions to Achieve Strategic Objectives
107
strategies, one for each agent in coalition Γ, a path p is
F
Γ
-compatible iff for every j > 0, p
j+1
= T (p
j
,a) for
some joint action a ∈ ACT such that for every i ∈ Γ,
a
i
= f
i
(p
1
,. .. , p
j
). Finally, let out(s,F
Γ
) be the set
of all F
Γ
-compatible paths starting with some s
0
such
that s
0
∼
i
s for some agent i ∈ Γ.
We can now assign a meaning to AT L
∗
formulas
on interpreted systems.
Definition 5 (Satisfaction). The satisfaction relation
|= for an IS M, state s, path p, and ATL
∗
formula φ is
defined as in Figure 1.
We say that formula ϕ is true in an IS M, or M |=
ϕ, iff (M,s
0
) |= ϕ. Furthermore, in Def. 5 we use 6|=
to represent that it is not the case that |=.
We now state the model checking problem.
Definition 6 (Model Checking). The model checking
(MC) problem concerns determining whether, given
an IS M, AT L
∗
formula φ, truth value v ∈ {tt,ff}, it is
the case that (M |= φ) = v.
In the following section, we exemplify the formal
machinery introduced so far with an example.
4 TRAIN GATE CONTROLLER
SCENARIO
We consider a revised version of the Train Gate Con-
troller by (Alur et al., 2002; Belardinelli et al., 2019b;
Belardinelli and Malvone, 2020) in which there are
two trains and a controller. The aim of the two trains
is to pass a gate. To do this, they need to coordinate
with the controller. The trains are initially placed out-
side the gate and to ask to go in the gate they need to
do a request (action req). If the controller accepts the
request (actions ac
1
and ac
2
, respectively), the train
has the grant to pass through the gate. Note that, to
perform the physical action of passing through the
gate, the train has to select the action in. Then, it
stays in the gate until it does the action out. What we
want to show in this game is the fact that the trains
need the accordance of the controller to achieve their
objectives (i.e. to pass the gate).
More formally, this game can be represented as
the IS M = hAg,s
0
,T, Πi, such that:
• Ag = {Train
1
,Train
2
,Controller};
out grant
in
(*,i,*)
(*,out,*)
(ac
1
,req,*)
(*,in,*)
Figure 2: Local model for train 1.
out grant
in
(*,*, i)
(*,*, out)
(ac
2
,*,req)
(*,*,in)
Figure 3: Local model for train 2.
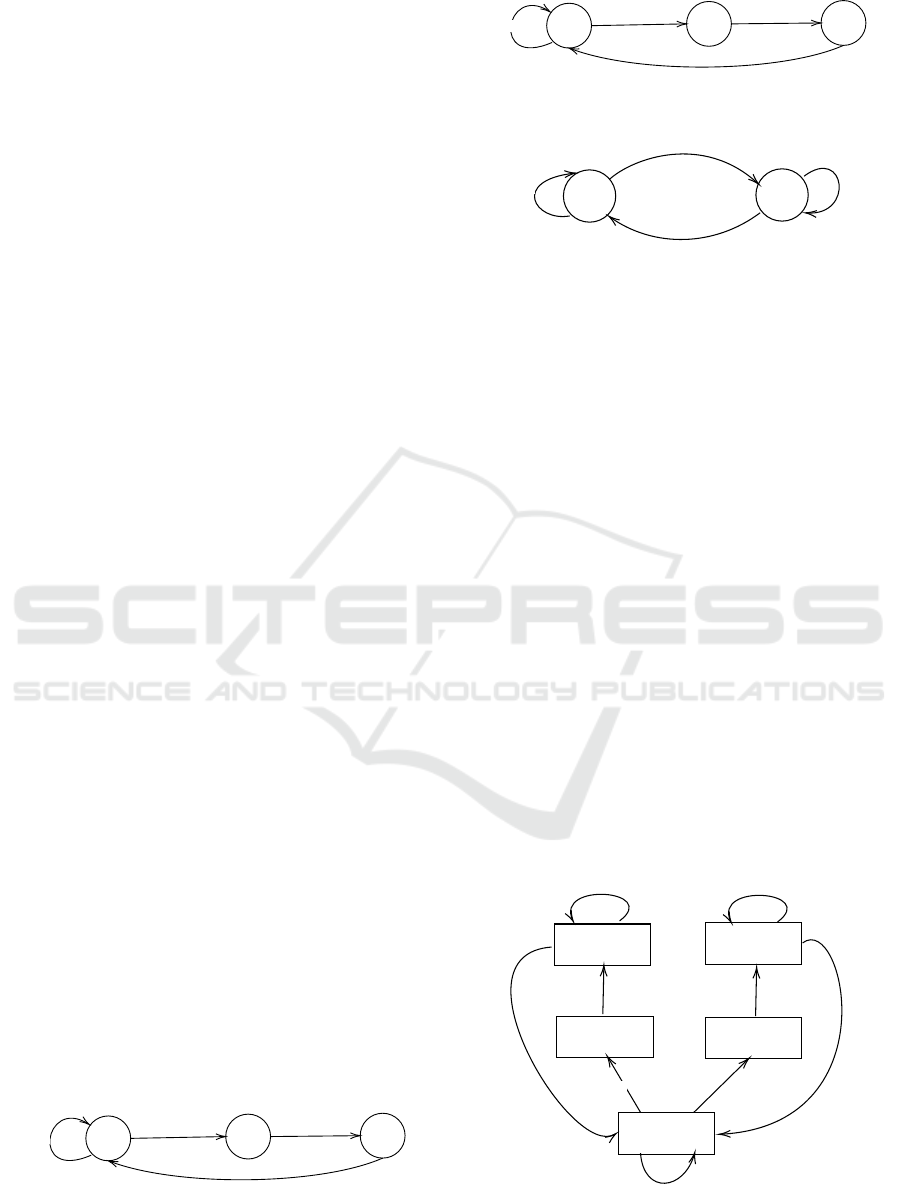
idle
busy
(ac
1
,req, ∗) or (ac
2
,∗, req)
(*, out, *) or (*, *, out)
(*, *, *)
(*, *, *)
Figure 4: The local model for the controller.
• Act
Train
1
= Act
Train
2
= {req,in,out, i}, where by
action req they do a request, by action in they go
in the gate, by action out they go outside the gate,
and by action i they do nothing. Act
Controller
=
{ac
1
,ac
2
,i}, where by action ac
j
the Controller
gives the access to train j ∈ {1,2}, and by action
i it does nothing.
The local model for Train
1
is given in Figure 2, the
local model for Train
2
is given in Figure 3, and the
local model of the Controller is given in Figure 4.
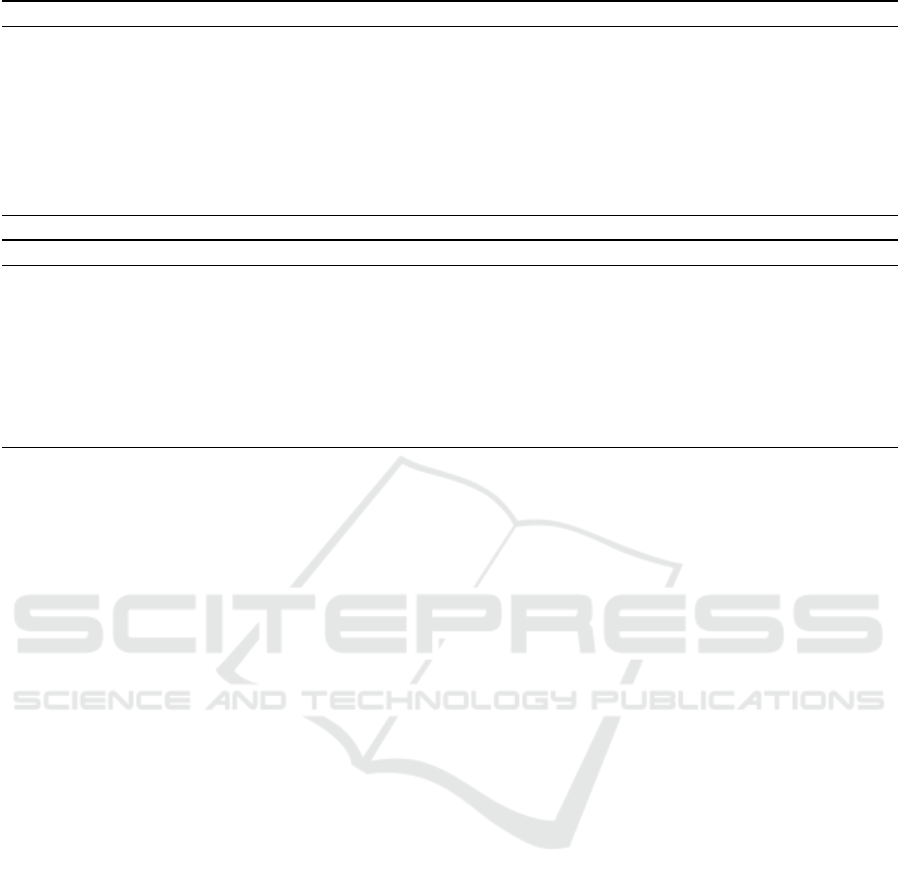
The global initial state, the transition function, and
the labelling function are given in Figure 5. In par-
ticular, each global state is represented as a rectangle
where the tuple (l
c
,l
t1
,l
t2
) includes the Controller’s
local state (l
c
), the Train 1’s local state (l
t1
), and the
Train 2’s local state (l
t2
). Furthermore, by the tuple of
local states, we can consider as atomic propositions
true in each state the names of the local states and, in
accordance to them, define the labelling function. No-
tice that, in the figures, we denote any available action
with the symbol ∗.
The property the Train 1 has a winning strategy to
achieve the gate can be represented as follows:
ϕ
1
= hhTrain
1
iiF in
1
idle, out, out
busy, grant, out
busy, out, grant
busy, out, inbusy, in, out
(ac
1
,req,*)
(ac
2
,*,req)
(*,in,*)
(*,*,in)
(*,out,*)
(*,*,out)
(*,*,*)
(*,*,*)(*,*,*)
Figure 5: The interpreted systems IS, where s
0
=
(idle,out,out).
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
108

We observe that ϕ
1
is false since to make the prop-
erty true the Train 1 needs the agreement of the Con-
troller. By consequence, the property that can be sat-
isfied is the following:
ϕ
1
= hhTrain
1
,ControlleriiF in
1
5 THE APPROACH
Once an interpreted system M has been defined, we
can unleash our approach. Starting from such game,
we can verify for which coalitions of agents an ATL
∗
formula ϕ is verified in M. Specifically, differently
from standard ATL
∗
, we do not want to explicitly state
each Γ coalition in ϕ; instead, we want to automati-
cally generate such coalitions. Naturally, not all coali-
tions are always of interest; this of course depends
on the domain of use. Thus, even though a coalition
makes a formula ϕ satisfied by a model M, it does not
necessarily mean such coalition is a good one (i.e., a
usable one).
γ Variables. To automatically generate the Γ coali-
tions in an ATL
∗
formula ϕ, it is first necessary to
have a way to uniquely identify each coalition in-
side the formula. In more detail, given an ATL
∗
for-
mula ϕ, we can annotate each strategic operator with
a corresponding Γ variable. Just to make an exam-
ple. Let us assume the ATL
∗
formula ϕ is as fol-
lows: hha, biiFGhha,ciiX p; with {a,b}, and {a, c}
two coalitions, and p an atomic proposition. The for-
mula becomes hhΓ
1
iiFGhhΓ
2
iiX p, where Γ
1
and Γ
2
are two variables, which will be replaced by the au-
tomatically generated coalitions. Note that, in both
strategic operators we may add the same Γ variable.
In such a case, we would enforce to use the same
coalition in the two strategic operators of ϕ.
In the following, we report the kind of guidelines
we want to enforce over the coalitions. Such guide-
lines guide the coalitions’ generation, so that all coali-
tions proposed by our approach both make ϕ satisfied
in M and respect all the guidelines.
5.1 Guidelines
Two types of guidelines could be of interest in our
investigation: the number of agents and how to group
of agents.
Number of Agents in Coalition. The first group of
guidelines concerns the size of the coalitions to gen-
erate. In more detail, it is possible to enforce the
minimum (resp. maximum) number of agents per
coalition. This is very important, because it relates
to possible real-world limitations. For instance, there
might be scenarios where coalitions with less than n
and more than m agents are not reasonable, because
to create a coalition of less than n and more than m
agents is too expensive for its gain. For this reason, a
min (resp. max) constraint can be specified to rule out
all Γ coalitions such that min ≤ |Γ| (resp. |Γ| ≤ max).
Considering our running example in Section 4, possi-
ble guidelines over the size of the coalitions could be
min : 2 and max : 3. With such guidelines, we would
enforce the generation of coalitions with at least two
agents, but at most three. This could be guided by
the fact that we know that no agent in isolation can
achieve its own goals in the running example; while
more than three agents would just be a waste of re-
sources (from the viewpoint of the interactions that
would be needed inside a coalition of agents).
Agents in the Same/Different Coalition. Another
relevant group of guidelines concerns which agents
can (or not) be in the same coalition. Again, this finds
its motivation in real-world applications, where it is
common to have limitations on how some agents can
be grouped. For instance, considering that the agents
are commonly situated in an environment, it may be
possible that some of them are close (or not) to each
other. For this reason, there might be interest in not
having in the same coalition agents that are far from
each other (for technological and practical reasons),
while there might be interest in having in the same
coalition agents that are local to each other. For this
reason, a [a →← b] (resp. [a ←→ b]) constraint can
be specified to keep all Γ coalitions s.t. a ∈ Γ ⇐⇒
b ∈ Γ (resp. a ∈ Γ =⇒ b /∈ Γ and b ∈ Γ =⇒ a /∈ Γ);
where a and b can be any agent in Ag. By considering
our running example, a possible constraint could be
[Train
1
→← Controller], where we enforce Train
1
and Controller to be in coalition. For similar reasons,
we may add the constraint [Train
1
←→ Train
2
] and
enforce the two trains to not be in coalition.
5.2 Verification
In the previous sections, we mainly focused on how
the ATL
∗
formulas can be modified, and how such
modification can be guided by the user. Here, we
move forward and present how our approach uses
the pre-processing steps to perform the actual for-
mal verification on MAS. Specifically, this is obtained
through two algorithms. Let us explore them in detail.
Algorithm 1. It reports the steps required to gen-
erate a set of valid coalitions, i.e., coalitions that re-
How to Find Good Coalitions to Achieve Strategic Objectives
109
Algorithm 1: GenCoalitions(Ag, min, max, T , S).
1: Γ
valid
=
/
0
2: for k ∈ [min, max] do
3: for Γ ∈ Γ
Ag
k
do
4: if ∃[a
1
→← a
2
] ∈ T : {a
1
,a
2
} 6⊆ Γ ∧ {a
1
,a
2
} ∩ Γ 6=
/
0 then continue
5: if ∃[a
1
←→ a
2
] ∈ S : {a
1
,a
2
} ⊆ Γ then continue
6: Add Γ to Γ
valid
7: return Γ
valid
Algorithm 2: MCMAS
co
(M, ϕ, min, max, T , S).
1: Ag = GetAgents(M)
2: Γ
good
=
/
0
3: Γ
valid
= GenCoalitions(Ag,min,max,T,S)
4: for Γ ∈ Γ
valid
do
5: if M |= ϕ
Γ
then
6: Add Γ to Γ
good
7: return Γ
good
spect the user’s guidelines. Algorithm 1 takes in input
the set of agents Ag, and the user’s guidelines, such
as the minimum/maximum number of agents to be in
the coalitions, and the set of agents that have to (resp.,
cannot) stay in the same coalition T (resp., S). At line
1, the set of valid coalitions is initialised to the empty
set. Then, at line 2, a value k is selected for any inte-
ger value between min and max (both included). Af-
ter that, the algorithm loops over all possible values
of k (lines 3-6); with k denoting the current size of
the considered coalitions. Naturally, there are multi-
ple k coalitions that can be formed over a set Ag of
agents. In more detail, they correspond to all possi-
ble combinations of k agents taken from the set Ag;
this is expressed by the set Γ
Ag
k
. For each of these
coalitions, the algorithm checks whether the guide-
lines are followed or not. First, it checks if all agents
that are required to be together in the coalition are as
such (line 4). If for at least one couple [a
1
→← a
2
],
we find only one agent in the coalition, then we skip
to the next possible coalition to evaluate. In the same
way, the algorithm checks for the agents that are not
meant to be together (lines 5). This again is achieved
by checking whether for some couple both the agents
are in the coalition. If that is the case, then the al-
gorithm moves on to the next coalition to evaluate.
At the end of the algorithm, the set Γ
valid
contains all
coalitions respecting the user’s guidelines.
Algorithm 2. It performs the actual verification
considering all valid agents’ coalitions. Algorithm 2
takes in input the model M, the AT L formula to ver-
ify ϕ, and the user’s guidelines. At line 1, the set of
agents is extracted from M. These are the agents in-
volved in the model. At line 2, the set of good coali-
tions is initialised to the empty set. By the end of
the algorithm, such set will contain the coalitions that
respect the user’s guidelines and make ϕ satisfied in
M. At line 3, Algorithm 1 is called. In this step, all
valid coalitions respecting the user’s guidelines are re-
turned. After that, the algorithm loops over each of
such valid coalitions. For each of them, the model
checking is performed. In here, with ϕ
Γ
we denote
ϕ where the coalition has been replaced with the cur-
rently selected one (i.e., Γ). If the model checking re-
turns true, i.e., model M satisfies formula ϕ
Γ
, then Γ
is added to the set of good coalitions Γ
good
. This veri-
fication step is applied on each valid coalition. At the
end of the algorithm, the set Γ
good
is returned. Note
that, in Algorithm 2, we only show the case with one
strategic operator in ϕ, that is, only one Γ coalition is
replaced in ϕ. We decided to do so in order to improve
the readability of the procedure. However, in case
multiple Γ coalitions are used, the same reasoning is
followed, where for each one of them a set of valid
coalitions is generated (using Algorithm 1). Then, in-
stead of performing model checking only once (Al-
gorithm 2, line 5), the algorithm would perform the
latter for every possible permutation. For instance, if
we had two coalitions Γ
1
and Γ
2
in ϕ (like in the ex-
ample mentioned earlier in the paper), then we would
consider all possible permutations of Γ
1
valid
and Γ
2
valid
.
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
110

Table 1: Number of good coalitions generated in our experiments. 1
st
column reports number of trains. 2
nd
column, no
guidelines are given. 3
rd
to 5
th
column minimum number of agents per coalition is required. 6
th
to 8
th
column maximum
number of agents per coalition is required. 9
th
to 12
th
columns guidelines on which agents can stay (or not) in coalition with.
N - ≥ 2 ≥ 3 ≥ 4 ≤ 2 ≤ 3 ≤ 4 ∃!i.[T
i
→← C] ∀i.[T
i
→← C] ∃!(i, j).[Ti ←→ T j] ∀(i, j).[Ti ←→ T j]
2 3 3 1 0 2 3 3 2 1 2 2
4 15 15 11 5 4 10 14 8 1 11 4
6 63 63 57 42 6 21 41 32 1 47 6
8 255 255 247 219 8 36 92 128 1 191 8
10 1023 1023 1013 968 10 55 175 512 1 767 10
6 IMPLEMENTATION
A prototype of our approach has been implemented
in Python
2
. The prototype gets in input an interpreted
system M, specified in terms of an ISPL file (the for-
malism supported by the MCMAS model checker), an
ATL formula to verify ϕ, and generates all coalitions
of agents which make M |= ϕ. To understand the tool,
first, we need to describe its pillar components.
The model checker we use is MCMAS (Lomus-
cio et al., 2015), which is the de facto standard model
checker of strategic properties on MAS. MCMAS ex-
pects in input an interpreted system specified as an
ISPL file. In such a file, the interpreted system is de-
fined along with the formal property of interest to ver-
ify. From the viewpoint of a MCMAS user, our tool
can be seen as an extension of MCMAS that allows
the user to, not only perform the verification of ATL
properties as usual, but to extract which coalitions of
agents make such properties verified in the model.
Since MCMAS expects a fully instantiated ATL
formula, in order to extract which coalitions of
agents are good candidates, our tool performs a pre-
processing step. In such step, as described previously
in the paper, all coalitions which follow the user’s
guidelines are generated (Algorithm 1) and tested on
MCMAS (Algorithm 2). In each run, MCMAS re-
turns the boolean result corresponding to the satisfac-
tion of the ATL formula over the interpreted system.
The coalitions for which MCMAS returns a positive
verdict are then presented as output to the user.
The generation of all agents’ coalitions has been
implemented in Python, as well as its enforcement
over the ISPL file. In fact, for each coalition follow-
ing the user’s guidelines, our tool updates the ISPL
in the following way. Considering Algorithm 2, this
step is implicitly performed in line 5, where the model
checking is performed. However, at the implemen-
tation level, the actual verification through MCMAS
requires to explicitly modify the ISPL file w.r.t. the
Γ coalition of interest (i.e., each coalition generated
by Algorithm 1). To achieve this technical step, first,
2
https://github.com/AngeloFerrando/mcmas-multi-coalitions
the tool searches all occurrences of Γ coalitions in the
ISPL file. This can be done by looking for the groups
keyword (which is the one used in MCMAS to de-
fine the agents belonging to each coalition used in the
ATL formula). After that, the tool replaces each coali-
tion with a coalition following the user’s guidelines.
Naturally, in case of multiple Γ coalitions in the ATL
formula, all possible permutations of valid coalitions
are considered. Once the ISPL file has been properly
modified with valid coalitions, MCMAS is called to
perform the actual verification.
7 EXPERIMENTS
We tested our tool over the train-gate controller sce-
nario, on a machine with the following specifications:
Intel(R) Core(TM) i7-7700HQ CPU @ 2.80GHz, 4
cores 8 threads, 16 GB RAM DDR4. We carried out
various experiments on our running example. But, we
have not only considered the case with two trains. In-
stead, we experimented with larger number of trains
as well, to better evaluate our tool’s performance. Ta-
ble 1 and Table 2 report the results we obtained.
Let us start with Table 1. It contains the number of
coalitions we found through experiments. In more de-
tail, the table is so structured. The first column reports
the number of trains used in the experiments (from 2
to 10 trains). Then, the rest of the columns correspond
to the results we get w.r.t. some specific guidelines.
Going from left to right. First, we find the case where
no guidelines have been passed to the tool. In such
case, the tool reports all good coalitions, without any
filter. This would correspond to a scenario where we
would not have any sort of resource limitation and to
group agents. Then, we have three different scenar-
ios where we set the minimum number of agents per
coalition (i.e., we pass the min guideline). We do so
for min equals to 2, 3, and 4. That is, we request only
coalitions containing at least 2, 3, and 4 agents, re-
spectively. Here, we can note how with min : 2, the
number of coalitions does not change w.r.t. the case
with no guidelines. This is due to the fact that, as
How to Find Good Coalitions to Achieve Strategic Objectives
111

Table 2: Execution time (in seconds) to generate the set of good coalitions in our experiments. 1
st
column reports number of
trains. 2
nd
column, no guidelines are given. 3
rd
to 5
th
column minimum number of agents per coalition is required. 6
th
to
8
th
column maximum number of agents per coalition is required. 9
th
to 12
th
columns guidelines on which agents can stay (or
not) in coalition with.
N - ≥ 2 ≥ 3 ≥ 4 ≤ 2 ≤ 3 ≤ 4 ∃!i.[T
i
→← C] ∀i.[T
i
→← C] ∃!(i, j).[Ti ←→ T j] ∀(i, j).[Ti ←→ T j]
2 0,06 0,03 0,01 0,00018 0,05 0,05 0,05 0,03 0,01 0,04 0,04
4 0,28 0,23 0,15 0,06 0,13 0,22 0,36 0,13 0,02 0,2 0,09
6 8,87 8,33 6,88 4,62 1,99 4,34 6,9 4,45 0,08 6,68 0,89
8 53,41 51,11 47,4 38,88 4,5 12,49 24,69 25,18 0,1 37,99 1,77
10 382,18 380,66 369,09 340,04 12,03 40,58 99,93 186,9 0,19 304,06 3,94
expected, no coalitions with less than 2 agents can
satisfy the property of interest; which we remind be-
ing ϕ = hhΓiiF in. Instead, the other two cases have
a fewer number of coalitions. This does not come as
a surprise, since we are requesting only larger coali-
tions (we filter out all coalitions with 2 and 3 agents,
respectively). After that, we find similar cases, where
instead the max guideline is used. First, by enforcing
the maximum number of agents in each coalition to
be 2, then 3, and finally 4. W.r.t. the previous cases,
here we can note how the choice of limiting the maxi-
mum number of agents in the coalitions is much more
effective in reducing the number of good coalitions
proposed. This again is reasonable, because we are
filtering out the larger coalitions. Finally, we find the
last four columns, which are focused on guidelines on
which agents can stay with whom in the coalitions.
First, we find the case where we request one single
train to be in coalition with the controller. Note that,
we do not decide such train a priori; it can be any
of the available trains. In such case, the number of
good coalitions is reduced, but not too much. This
is due to the fact that requesting only one train to be
in coalition with the controller is not a strong guide-
line (indeed, other trains can be in coalition as well).
Then, the next case consists in requesting all trains to
be in coalition with the controller. In this case, we
obtain only one good coalition (no matter the num-
ber of trains). Since we are requesting all agents to
be in coalition, this result is in line with the expecta-
tions. In the second to last column, we find a case
where we request two trains not to be in coalition.
As before, we are not interested in which trains, as
long as only two are required not to be in coalition.
As expected, this guideline does not affect much the
number of good coalitions generated. Indeed, asking
to not having just two trains in coalition does not fil-
ter out many viable alternatives. Last column presents
the same scenario, but where all trains are requested to
not be in the same coalition. So, each train cannot col-
laborate with any other train. This produces a number
of coalitions equivalent to the number of trains used
in the experiments. This again does not come as a sur-
prise, since the only possible good coalitions are the
ones with one train and the controller (no other trains
involved).
Moving on with Table 2, we find the same kind of
experiments of Table 1. Nonetheless, instead of re-
porting the number of good coalitions generated, Ta-
ble 2 reports the execution time required to extract
such coalitions. The execution time comprises both
the generation of the valid coalitions, and their veri-
fication through MCMAS. The columns are the same
as in Table 1, but we can observe how much time the
tool required to extract the coalitions. Naturally, we
can observe that stronger are the guidelines, less is the
execution time (since less are the valid coalitions that
need to be verified in MCMAS). One important aspect
to point out is that our experiments required less than
1 minute when considering the scenarios with at most
8 trains and less than 6 minutes (or so) for 10 trains.
This is encouraging, since our approach handles even
scenarios where the resulting model is far from being
trivial (or small).
8 CONCLUSIONS AND FUTURE
WORK
In this paper, we have presented an extension of
MCMAS in which the users can characterise the
coalitions in the strategy quantifiers. To do this, we
have considered coalitions as variables of the prob-
lem. In particular, we have shown how to give the
power to a user to handle two main features: the num-
ber of agents involved in the coalitions and how to
create coalitions by considering who have to play to-
gether and who have to play against. This work is a
first stone to develop a more generalised tool for ver-
ifying multi-agent systems.
As future work, we want to analyse the theoreti-
cal foundations of our practical idea. So, the first aim
is to study how to extend the syntax and semantics
of ATL to handle coalition variables. To do this, we
can follow some ideas on graded modalities such as in
(Malvone et al., 2018; Aminof et al., 2018). Further-
more, we want to study additional features to make
the verification as useful and friendly as possible for
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
112

general users.
REFERENCES
Alur, R., Henzinger, T., and Kupferman, O. (2002).
Alternating-time temporal logic. J. ACM, 49(5):672–
713.
Aminof, B., Malvone, V., Murano, A., and Rubin, S. (2018).
Graded modalities in strategy logic. Inf. Comput.,
261:634–649.
Baier, C. and Katoen, J. P. (2008). Principles of Model
Checking (Representation and Mind Series). MIT
press.
Belardinelli, F., Jamroga, W., Kurpiewski, D., Malvone, V.,
and Murano, A. (2019a). Strategy logic with simple
goals: Tractable reasoning about strategies. In Kraus,
S., editor, Proceedings of the Twenty-Eighth Interna-
tional Joint Conference on Artificial Intelligence, IJ-
CAI 2019, Macao, China, August 10-16, 2019, pages
88–94. ijcai.org.
Belardinelli, F., Lomuscio, A., and Malvone, V. (2018).
Approximating perfect recall when model checking
strategic abilities. In KR18.
Belardinelli, F., Lomuscio, A., and Malvone, V. (2019b).
An abstraction-based method for verifying strategic
properties in multi-agent systems with imperfect in-
formation. In Proceedings of AAAI.
Belardinelli, F., Lomuscio, A., Malvone, V., and Yu, E.
(2022). Approximating perfect recall when model
checking strategic abilities: Theory and applications.
J. Artif. Intell. Res., 73:897–932.
Belardinelli, F. and Malvone, V. (2020). A three-valued ap-
proach to strategic abilities under imperfect informa-
tion. In Calvanese, D., Erdem, E., and Thielscher, M.,
editors, Proceedings of the 17th International Confer-
ence on Principles of Knowledge Representation and
Reasoning, KR 2020, Rhodes, Greece, September 12-
18, 2020, pages 89–98.
Bloem, R., Chatterjee, K., Jacobs, S., and K
¨
onighofer, R.
(2015). Assume-guarantee synthesis for concurrent
reactive programs with partial information. In TACAS,
pages 517–532.
Dima, C. and Tiplea, F. (2011). Model-checking ATL under
Imperfect Information and PerfectRecall Semantics is
Undecidable. Technical report, arXiv.
Fagin, R., Halpern, J. Y., Moses, Y., and Vardi, M. Y.
(1995). Reasoning about Knowledge. MIT Press.
Ferrando, A. and Malvone, V. (2021a). Strategy RV: A tool
to approximate ATL model checking under imperfect
information and perfect recall. In Dignum, F., Lomus-
cio, A., Endriss, U., and Now
´
e, A., editors, AAMAS
’21: 20th International Conference on Autonomous
Agents and Multiagent Systems, Virtual Event, United
Kingdom, May 3-7, 2021, pages 1764–1766. ACM.
Ferrando, A. and Malvone, V. (2021b). Towards the veri-
fication of strategic properties in multi-agent systems
with imperfect information. CoRR, abs/2112.13621.
Ferrando, A. and Malvone, V. (2022). Towards the combi-
nation of model checking and runtime verification on
multi-agent systems. In Dignum, F., Mathieu, P., Cor-
chado, J. M., and de la Prieta, F., editors, Advances
in Practical Applications of Agents, Multi-Agent Sys-
tems, and Complex Systems Simulation. The PAAMS
Collection - 20th International Conference, PAAMS
2022, L’Aquila, Italy, July 13-15, 2022, Proceedings,
volume 13616 of Lecture Notes in Computer Science,
pages 140–152. Springer.
Goranko, V. and Jamroga, W. (2004). Comparing se-
mantics for logics of multi-agent systems. Synthese,
139(2):241–280.
Jamroga, W. and van der Hoek, W. (2004). Agents that
know how to play. Fund. Inf., 62:1–35.
Kupferman, O. and Vardi, M. Y. (1997). Module checking
revisited. In CAV’97, pages 36–47. Springer.
Laroussinie, F., Markey, N., and Oreiby, G. (2008). On
the expressiveness and complexity of ATL. Logical
Methods in Computer Science, 4(2:7).
Lomuscio, A., Qu, H., and Raimondi, F. (2015). MCMAS:
A model checker for the verification of multi-agent
systems. Software Tools for Technology Transfer.
Lomuscio, A. and Raimondi, F. (2006). Model checking
knowledge, strategies, and games in multi-agent sys-
tems. In AAMAS 2006, pages 161–168. ACM Press.
Malvone, V., Mogavero, F., Murano, A., and Sorrentino, L.
(2018). Reasoning about graded strategy quantifiers.
Inf. Comput., 259(3):390–411.
Mogavero, F., Murano, A., Perelli, G., and Vardi,
M. (2014). Reasoning about strategies: On the
model-checking problem. ACM Trans. Comp. Log.,
15(4):34:1–34:47.
Mogavero, F., Murano, A., Perelli, G., and Vardi, M. Y.
(2017). Reasoning about strategies: on the satisfiabil-
ity problem. Log. Methods Comput. Sci., 13(1).
Pnueli, A. and Rosner, R. (1990). Distributed reactive sys-
tems are hard to synthesize. In FOCS, pages 746–757.
Reif, J. H. (1984). The complexity of two-player games
of incomplete information. J. Comput. Syst. Sci.,
29(2):274–301.
How to Find Good Coalitions to Achieve Strategic Objectives
113
