
A Modular BLE-Based Body Area Network Embedded into a Smart
Garment for Rescuers Real-Time Monitoring in
Emergency Scenarios
Giulia Sedda
*a
, Giulia Baldazzi
b
, Salvatore Spanu
c
, Antonello Mascia
d
, Andrea Spanu
e
,
Piero Cosseddu
f
, Annalisa Bonfiglio
g
and Danilo Pani
h
Department of Electrical and Electronic Engineering (DIEE), University of Cagliari, Cagliari, Italy
Keywords: Body Area Network, BLE, First Responders, Wearable Sensors, Smart Garment.
Abstract: In this work, we present a prototype of a smart technical underwear for first responders involved in search-
and-rescue operations, to be worn under the rescuer’s professional uniform. Polymer-based electrodes able to
detect ECG and EMG signals, and organic transistor for joint angles estimation are embedded into the smart
garment. The technical underwear implements a body sensor network of BLE nodes able to acquire, process
in real-time and transmit electrophysiological and biomechanical data from the sensors to a custom Android
app on the rescuer’s smartphone. The app geolocates the data by using the information of the GPS integrated
into the smartphone and sends them to the control center for remote monitoring. The system features high
modularity, as the rescuer can adopt a subset of sensors depending on the specific operative context, without
any app configuration.
1 INTRODUCTION
First responders involved in difficult search-and-
rescue operations are subject to hazardous conditions,
and it is critical to take care of their safety and health
status during the operations. The development of
smart garments with physiological and
biomechanical sensing capabilities, to be integrated in
a broader monitoring system, is then of paramount
importance for their safety. In this context, wearable
technologies for vital signs monitoring represent a
great opportunity to obtain unobtrusive sensing
allowing free movement and operation.
Recently, various sensorized technical clothing
for rescuers have been designed, such as the system
developed in the ProeTEX (Protection e-Textiles:
Micro-Nano-Structured fiber systems for
Emergency-Disaster Wear) European project, which
integrates wearable and portable sensors, in order to
detect both parameters representing the health status
of the firefighter and environmental variables
a
https://orcid.org/0000-0002-9662-7697
b
https://orcid.org/0000-0003-1275-4961
c
https://orcid.org/0000-0002-2600-8241
d
https://orcid.org/0000-0002-4185-7225
(Curone et al. 2010). The sensing nodes, both custom
and commercial, devoted to assessing the health
status of the emergency operator, are distributed in an
internal garment and provide the heart rate, the
breathing rate, the body temperature and the blood
oxygen saturation. An outer garment assesses the
operator activity state and monitors the surrounding
environment, by estimating the operator position,
activity, and posture, and measuring the external
temperature, the presence of toxic gases, and the heat
flux passing through the garments. The internal
garment is a T-shirt directly in contact with the user
skin; to maximize the user comfort, textile-based
and/or textile-compatible technologies have been
employed. Both sensors and electrodes are connected
to the electronic modules through textile-conductive
cables integrated in the shirt. All the data are
transmitted remotely to the operation manager in real-
time through the Wi-Fi network.
In 2014, Salim et al. designed a sensorized T-shirt
to monitor physiological parameters such as skin
e
https://orcid.org/0000-0003-0331-7516
f
https://orcid.org/0000-0003-4896-504X
g
https://orcid.org/0000-0001-7866-4526
h
https://orcid.org/0000-0003-1924-0875
Sedda, G., Baldazzi, G., Spanu, S., Mascia, A., Spanu, A., Cosseddu, P., Bonfiglio, A. and Pani, D.
A Modular BLE-Based Body Area Network Embedded into a Smart Garment for Rescuers Real-Time Monitoring in Emergency Scenarios.
DOI: 10.5220/0011778100003414
In Proceedings of the 16th International Joint Conference on Biomedical Engineering Systems and Technologies (BIOSTEC 2023) - Volume 1: BIODEVICES, pages 177-181
ISBN: 978-989-758-631-6; ISSN: 2184-4305
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
177
temperature, heart rate, heat flux, and ultraviolet
exposure, in order to assess the firefighter's thermal
status and alert workers regarding the heat exhaustion
while operating in hot industrial environments.
Sensor data and alerts are sent wirelessly (XBee
series-1 radio) in real-time to the wearer, by using a
phone App, and to the remote center.
Afterwards, a smart T-shirt made out of Nomex
fabrics, which has inherent flame-resistant and very
low heat-conductance properties, was designed to
detect the mental stress of the firefighters. The smart
garment monitors their physiological signals (i.e., the
heart rate) and the environmental conditions
(temperature and humidity) and processes this
information with a machine learning algorithm
(Sandulescu et al. 2015). The system also integrates
movement sensors and a microphone for team
communication, whose features are elaborated for
stress monitoring of rescuers. Wires connecting to the
data acquisition and processing unit are woven in the
garment. Data are sent remotely in real-time by using
the ZigBee protocol.
As part of the H2020 Search & Rescue European
Project (https://search-and-re-rescue.eu/), we
designed, developed, and tested on the field a smart
underwear implementing a BLE-based modular
wearable system for rescuers operating in critical
emergency contexts, such as searching people trapped
under the rubble. The system is able to collect
physiological and biomechanical parameters
measured by custom-designed wireless sensing nodes
acquiring data (ECG, EMG, and strain) from as many
sensors embedded in the smart underwear. Each node
sends the edge-processed data to a wearable hub,
represented by a smartphone, which is in charge of
local visualization and real-time transmission to the
operational control center.
2 SYSTEM ARCHITECTURE
The developed smart underwear has been designed to
be worn under the rescuer’s uniform, allowing
monitoring the ECG, EMG, and knee joint angle of
the first responder during the search and rescue
operations. It is composed of a T-shirt and leggings
made of a highly breathable, stretchable, resistant,
and comfortable polyester fabric.
2.1 Sensing Elements
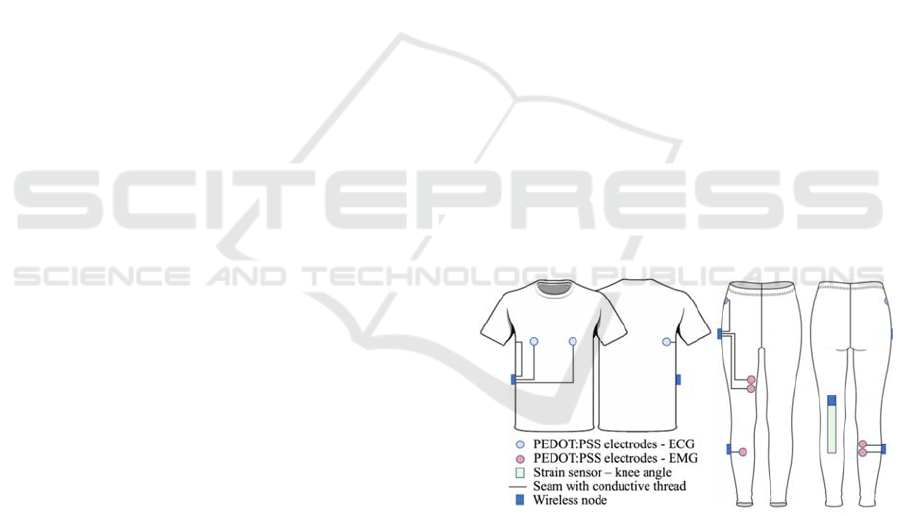
As shown in Figure 1, the garments are functionalized
in the targeted areas using a biocompatible
conductive ink based on poly(3,4-
ethylenedioxythiophene) polystyrene sulfonate
(PEDOT:PSS) (Tsukada et al. 2012, Tseghai et al.
2020), to form electrodes able to detect cardiac and
muscle biopotentials (Guo et al. 2016, Sinha et al.
2017, Pani et al. 2018, Achilli et al. 2018, Spanu et al.
2021). Two ECG electrodes are positioned on the
chest, symmetrically with respect to the sagittal line,
to detect the ECG according to the lead I direction. A
further electrode on the back, approximately at the
same height, provides the signal ground for this
recording (Figure 1 - light blue circles - and Figure
2A). Experimentally, after carrying out several tests,
this configuration of the electrodes proved to be the
best for guaranteeing adhesion of the electrode and
the acquisition of a good signal (data not shown). A
couple of EMG electrodes is placed on the upper leg,
to detect the activity of the vastus medialis, with a
ground electrode over the knee (Figure 1 - red circles
– and Figure 2A, 2D). A second couple of EMG
electrodes is positioned on the gastrocnemius
medialis, with the ground electrode over the
shinbone. Similar to ECG, various possibilities were
tested for the configuration of the electrodes for
EMG, and the one chosen proved to be the best. All
the electrodes were patterned directly on the finished
garment using a customized screen-printing
technique, as already reported in Spanu et al. (2021).
The employed technique allowed to obtain perfectly
functional electrodes even upon a sustained stretch of
the garment.
Figure 1: Overview of the smart underwear.
Biopotentials from the electrodes are read by
custom-developed, low-power, low-cost, small
wireless nodes (Figure 1, blue rectangles). In
particular, the nodes embed the TI’s ADS1292
module, a 24-bit, 2-channel ADC with an integrated
analog front-end for electrophysiological signals
(ECG, EMG). The connection between the wireless
node and the electrodes is made up of conductive steel
threads sewn directly on the underwear (see both
Figure 1 and Figures 2A, 2D). As the performance of
the electrodes depends on their coupling with the
BIODEVICES 2023 - 16th International Conference on Biomedical Electronics and Devices
178
skin, which must be stable and characterized by low
impedance, the electrodes were firmly attached on the
skin by using elastic bands able to guarantee a
uniform and constant pressure over the skin (Figure
2D).
Lastly, an organic semiconductor-based strain
sensor is placed over the popliteal fossa (Figure 1, the
green vertical strip), that is able to dynamically
change its resistance according to the angular
extension of the joint (Taroni et al. 2018, Sezen-
Edmonds et al. 2019). It is a three-terminal device,
namely thin-film transistors (TFT), whose sensitivity
can be tuned and amplified by means of the gate field,
and that can be incorporated into cotton garments for
measuring joint movements (Lai et al. 2019). In this
case, the wireless node is directly attached to the
sensors without any conductive yarn.
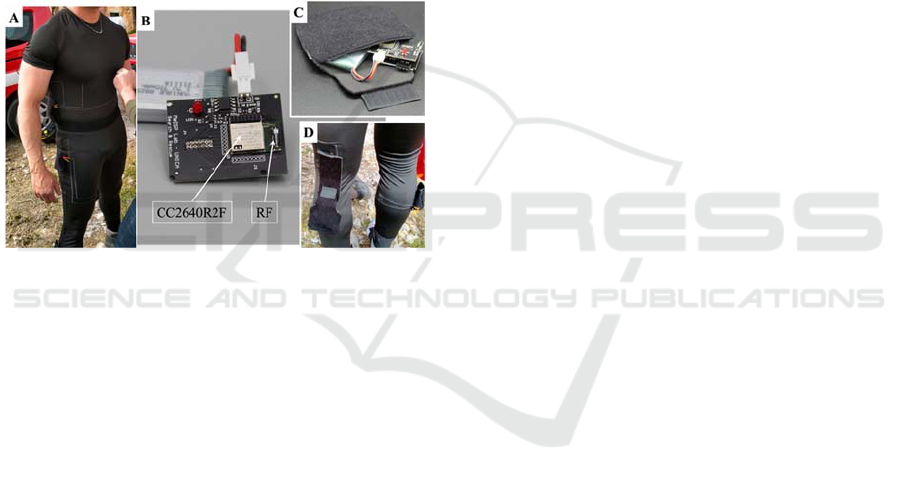
Figure 2: A: Front view of the smart underwear, with ECG
and EMG electrodes for vastus medialis muscle; B:
Custom-developed wireless node; C: Neoprene pocket
housing the electronic node. Velcro stripes allow the pocket
to be easily attached to the garment. D: Back view of the
smart underwear, with detail on both the strain sensor on
the left, and EMG electrodes for gastrocnemius medialis on
the right.
2.2 Wireless Nodes
The wireless nodes support both acquisition and basic
edge-processing features, and are housed in small
neoprene pockets along with their battery, as shown
in Figure 2C. They are based on a Texas Instrument
CC2640R2F microcontroller, integrated in a
convenient system-on-module (Figure 2B). This
wireless microcontroller features an ARM Cortex-
M3 processor (32 bit), running at 48 MHz, with
275 kB of non-volatile memory, ultra-low power
sensor controller, and several peripheral modules
(e.g. general-purpose timer modules, 12-bit ADC,
UART, I2C, I2S, SSI, Real-Time Clock, and others).
In particular, the ultra-low power sensor controller
can interface with external sensors and collect
analogue and digital data independently, while the
rest of the system is in sleep mode. Lithium-polymer
batteries (720 mAh, 3.7V) have been selected by
overestimating the duration of the typical emergency
interventions, as they can provide supply for a week
at full strength.
The estimated power consumption
of the wireless node is about 15mW.
The CC2640R2F is provided with a radio
frequency module, implementing a 2.4 GHz
transceiver compatible with Bluetooth low-energy
(BLE) 5.1 and earlier low-energy specifications. It is
characterized by excellent receiver sensitivity (–97
dBm for BLE), selectivity and blocking performance.
This is also suitable for systems targeting compliance
with worldwide radio frequency regulations, i.e.,
ETSI EN 300 328 (Europe), EN 300 440 Class 2
(Europe), FCC CFR47 Part 15 (US), or ARIB STD-
T66 (Japan).
2.3 A BLE-Based Body Area Network
Each sensor is provided with a dedicated BLE node,
to foster modularity and the possibility to equip the
first responder only with the useful sensors for the
given scenario, avoiding over-connected and useless
smart garments that could hamper the mobility and,
consequently, the field operation.
Each wireless node is able to detect a single-
channel signal, which is edge-pre-processed to extract
the heart rate from the ECG signal, the maximum
voluntary contraction of the EMG signal, and the
angular extension of the knee joint. Raw data and key
features (such as the heart rate) are sent to the
rescuer’s smartphone in real-time, by using custom-
defined GATT characteristics. Data rate is signal-
dependent: as such, the ECG signal is sampled and
sent at 250 Hz; the EMG signal is sampled at 250 Hz,
whereas its envelope is edge-computed and sent at
50 Hz; joint angles are sampled at 10 Hz and their
average value is sent at 1 Hz. A custom Android app
was designed to collect the data from the different
wireless nodes (see Figure 3). On the smartphone, by
using the information of the integrated GPS module,
data are geolocated and sent to the remote web server,
every five seconds in independent chunks, through
Wi-Fi or cellular network.
The app is able to interact with Apache Kafka, a
broker for streaming processing based on a
distributed data storage, which receives the data in
JSON format in real-time every 5 s. Depending on the
sensor type, the data file comprises different fields;
the size of the field that contains the signal depends
on the sampling frequency of the data.
A Modular BLE-Based Body Area Network Embedded into a Smart Garment for Rescuers Real-Time Monitoring in Emergency Scenarios
179
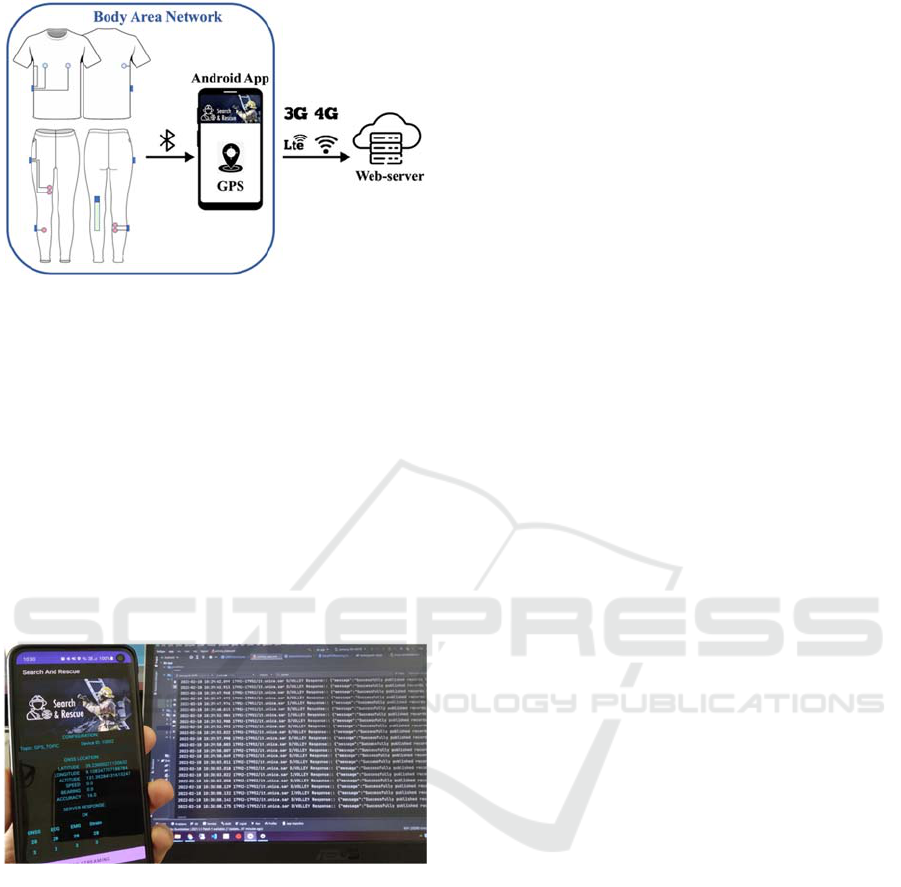
Figure 3: Overview of the system architecture.
The application has a very simple interface
(Figure 4), which provides information on the sensors
connected to the application, and therefore in use. In
addition, the app allows real-time display of some
characteristics of the Global Navigation Satellite
Systems (GNSS) location, including latitude,
longitude and altitude coordinates, detected through
the GPS sensor embedded in the smartphone. Finally,
it shows the status of communication with the server
(SERVER RESPONSE: OK/NO NETWORK), and
the total number of packets sent and queued
(therefore not yet consumed by the server) for each of
the connected nodes.
Figure 4: The Search & Rescue Android App sends the data
to the web server in real-time.
3 DISCUSSION
The smart underwear prototype presented in this work
differs from similar solutions described in the
literature for several aspects. In fact, it consists of
both a T-shirt and a leggings, compared to Curone et
al. 2010, Salim et al. 2014, Sandulescu et al. 2015,
allowing for monitoring the muscle contraction at the
level of the lower limb and the angle of the knee joint,
which give indications on the rescuer's activity.
Furthermore, the application of organic
semiconductor sensors, such as electrodes for
electrophysiological measurements and the strain
sensor for detecting knee angle, is completely new in
the search and rescue field, where it can be widely
used for monitoring the physical and health
conditions of the first responder in a totally non-
invasive way, with innovative and low-cost materials
and through technologies that have shown good
performance compared to the gold standard.
In addition, the position of the nodes on the
underwear is independent of that of the actual sensors,
therefore it can easily be modified to meet the specific
needs of the rescuer.
Another important aspect concerns the size of the
node, which is miniaturized and with low power
consumption compared to the solutions found in the
literature: for example, for the same battery capacity
(1200 mAh), each node of our prototype can work
continuously for days (up to a week) with all the
sensors connected, while the smart solution proposed
by Salim et al. 2014 can work continuously up to 5
hours without the GPS connected.
4 CONCLUSIONS
At present, the smart underwear was successfully
tested in the first two demonstrative use cases on the
field envisaged in the project.
Currently, up to four sensors can be present on the
underwear to sense and transmit the physiological and
biomechanical data of the rescuer. The functionalities
of both the smart underwear and the custom Android
app are being extended to include the acquisition of
signals coming from other types of sensors, also
eventually integrated in the external uniform.
ACKNOWLEDGEMENTS
The authors acknowledge funding from the European
Union’s Horizon 2020 research and innovation
programme under grant agreement No. 882897–
Search&Rescue project.
REFERENCES
Achilli, A., Bonfiglio, A. and Pani, D. (2018). Design and
characterization of screen-printed textile electrodes for
ECG monitoring, IEEE Sensors Journal, vol. 18, no. 10,
2018. DOI: 10.1109/JSEN.2018.2819202.
Curone, D. et al. (2010). Smart garments for emergency
operators: The ProeTEX project, IEEE Transactions on
BIODEVICES 2023 - 16th International Conference on Biomedical Electronics and Devices
180

Information Technology in Biomedicine, vol. 14, no. 3.
DOI: 10.1109/TITB.2010.2045003.
Guo, Y., et al. (2016). PEDOT:PSS ‘wires’ Printed on
Textile for Wearable Electronics, ACS Applied
Materials and Interfaces, vol. 8, no. 40, doi:
10.1021/acsami.6b08036.
Lai, S., Garufi, A., Madeddu, F., Angius, G., Bonfiglio, A.,
and Cosseddu, P. (2019). A Wearable Platform for
Monitoring Wrist Flexion and Extension in Biomedical
Applications Using Organic Transistor-Based Strain
Sensors, IEEE Sensors Journal, vol. 19, no. 15, doi:
10.1109/JSEN.2019.2909174.
Pani, D., Achilli, A., & Bonfiglio, A. (2018). Survey on
textile electrode technologies for electrocardiographic
(ECG) monitoring, from metal wires to polymers.
Advanced Materials Technologies, 3(10), 1800008.
https://doi.org/10.1002/admt.201800008.
Salim, F., Prohasky, D., Belbasis, A., Houshyar, S., & Fuss,
F. K. (2014, September). Design and evaluation of
smart wearable undergarment for monitoring
physiological extremes in firefighting. In Proceedings
of the 2014 ACM International Symposium on
Wearable Computers: Adjunct Program (pp. 249-254).
DOI:10.1145/2641248.2666716.
Sandulescu, V., & Dobrescu, R. Wearable system for stress
monitoring of firefighters in special missions. In 2015
E-Health and Bioengineering Conference (EHB) (pp. 1-
4). IEEE. DOI:10.1109/EHB.2015.7391578.
Sezen-Edmonds, M., Yeh, Y. W., Yao, N., and Loo, Y. L.
(2019). Humidity and Strain Rate Determine the Extent
of Phase Shift in the Piezoresistive Response of
PEDOT:PSS, ACS Applied Materials and Interfaces,
vol. 11, no. 18, doi: 10.1021/acsami.9b00817.
Sinha, S. K. et al. (2017). Screen-Printed PEDOT:PSS
Electrodes on Commercial Finished Textiles for
Electrocardiography, ACS Applied Materials and
Interfaces, vol. 9, no. 43, 2017, doi:
10.1021/acsami.7b09954.
Spanu A, Botter A, Zedda A, Cerone GL, Bonfiglio A, Pani
D. Dynamic Surface Electromyography Using
Stretchable Screen-Printed Textile Electrodes. IEEE
Trans Neural Syst Rehabil Eng. 2021;29:1661-1668.
doi: 10.1109/TNSRE.2021.3104972.
Taroni, P. J., et al. (2018). Toward Stretchable Self-
Powered Sensors Based on the Thermoelectric
Response of PEDOT:PSS/Polyurethane Blends,
Advanced Functional Materials, vol. 28, no. 15, doi:
10.1002/adfm.201704285.
Tseghai, G. B., Mengistie, D. A., Malengier, B., Fante, K.
A., and Van Langenhove, L. (2020). PEDOT:PSS-
based conductive textiles and their applications,
Sensors (Switzerland), vol. 20, no. 7. doi: 10.3390/s
20071881.
Tsukada, S., Nakashima, H., and Torimitsu, K. (2012).
Conductive polymer combined silk fiber bundle for
bioelectrical signal recording, PLoS ONE, vol. 7, no. 4,
doi: 10.1371/journal.pone.0033689.
A Modular BLE-Based Body Area Network Embedded into a Smart Garment for Rescuers Real-Time Monitoring in Emergency Scenarios
181
