Supervised Learning for Untangling Braids
Alexei Lisitsa
1 a
, Mateo Salles
2
and Alexei Vernitski
2 b
1
University of Liverpool, U.K.
2
University of Essex, U.K.
Keywords:
Deep Learning, Supervised Learning, Behavioral Cloning, Braid.
Abstract:
Untangling a braid is a typical multi-step process, and reinforcement learning can be used to train an agent to
untangle braids. Here we present another approach. Starting from the untangled braid, we produce a dataset
of braids using breadth-first search and then apply behavioral cloning to train an agent on the output of this
search. As a result, the (inverses of) steps predicted by the agent turn out to be an unexpectedly good method
of untangling braids, including those braids which did not feature in the dataset.
1 INTRODUCTION
Braids are mathematical objects which are studied us-
ing knot theory and group theory. For us in our study,
braids are a type of mathematical objects to which
machine learning can be usefully applied. See more
on the problem of untangling braids in Section 3. In
our earlier research we attempted to apply reinforce-
ment learning to the problem of untangling braids,
with limited success. In this study we develop and
successfully apply a new approach which is inspired
by behavioral cloning and includes supervised learn-
ing as one of its parts, see Section 2 for more details.
The contribution of the study is two-fold, combin-
ing a new insight in the problems related to braids, on
the one hand, and a new machine learning technique
which can be used in place of reinforcement learning,
on the other hand.
2 GENERAL IDEA
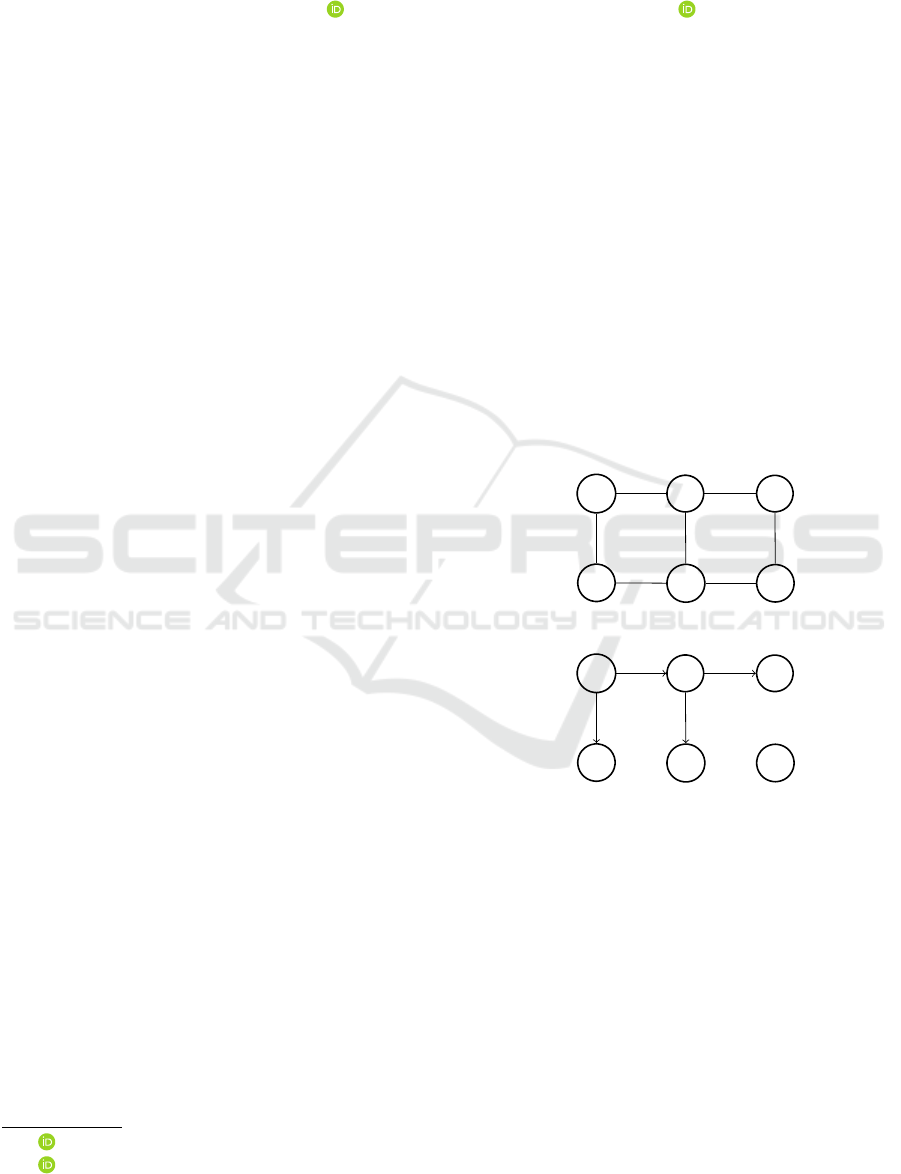
Consider a network having a certain regular structure
(for example, a grid), like the one in Figure 1.
We want to train an agent to find a path, starting
from an arbitrary node in this network, to the node
O. There are many approaches which can be used,
including several flavours of reinforcement learning
(Sutton and Barto, 2018). However, in this study we
a
https://orcid.org/0000-0002-3820-643X
b
https://orcid.org/0000-0003-0179-9099
use supervised learning, namely, a version of behav-
ioral cloning (Ho and Ermon, 2016).
O
A
B
C
D E
Figure 1: A sample network to apply breadth first search to.
O
A
B
C
D E
Figure 2: Breadth first search has been applied.
Starting from node O, we perform a breadth first
search of a given depth. As a result of this search,
we obtain a tree within the network, which stores, for
each node in the tree, one of possible shortest ways
of reaching this node from O. Figure 2 shows such a
tree, with depth 2, in the network shown in Figure 1.
Then we train a neural network to predict, for a given
node picked from the tree, what was the last move
between two nodes in the tree that has reached this
node. For example, for node D in Figure 2 the correct
answer would be ‘reach it by moving from A to D’. To
be more precise, note that the network might contain a
large number of nodes, but only a very small number
of different kinds of moves; for example, in a grid the
moves are ‘move up’, ‘move right’, ‘move down’, and
784
Lisitsa, A., Salles, M. and Vernitski, A.
Supervised Learning for Untangling Braids.
DOI: 10.5220/0011775900003393
In Proceedings of the 15th International Conference on Agents and Artificial Intelligence (ICAART 2023) - Volume 3, pages 784-789
ISBN: 978-989-758-623-1; ISSN: 2184-433X
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
‘move left’. Thus, for node D in Figure 2 the correct
answer would be ‘reach it by moving down’.
Below, we will refer to the trained neural network
predicting the last step in the tree as Lara (for ‘last’).
After we have trained Lara, we use another piece of
code to find a path from a given node to O; we call
this code Una (for ’untangle’). Starting from a given
node, Una asks Lara how this node is classified, and
then performs the opposite move; then the same step
is repeated until O is reached. For example, if Una
starts at node D, Lara classifies this node as ‘move
down’, thus, Una applied the opposite move, ‘move
up’, reaching node A, then asks Lara again, etc., until
O is reached.
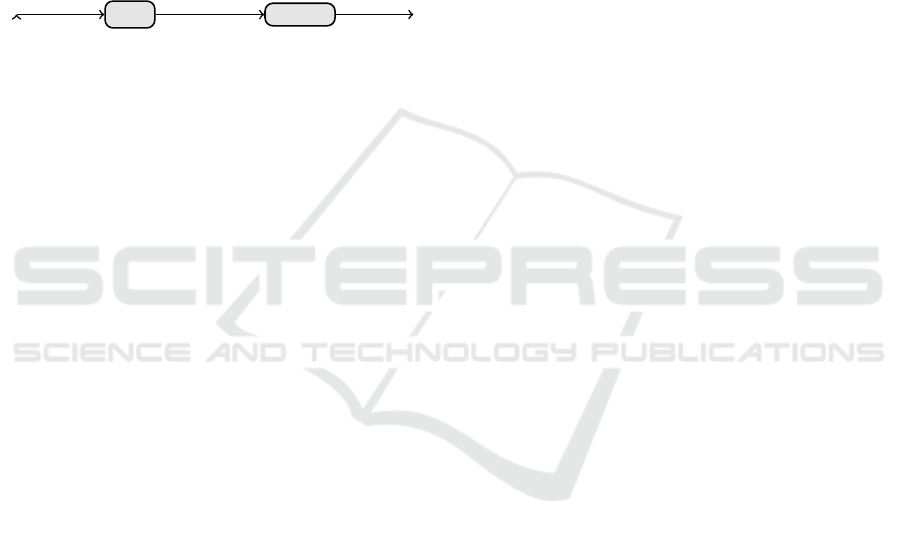
Lara
reverse
state action action
Figure 3: Diagram showing how Una works. A trained clas-
sifier Lara is applied to a state to produce an action; then the
action is reversed.
Note that the tree does not include all nodes in the
network, for example, node E in Figure 2 is not in the
tree. Lara is not trained on the nodes which are not in
the tree. However, due to the regular structure of the
network, we can hope that Lara will be able to gen-
eralize to these nodes and produce a reasonable rec-
ommendation for Una. For example, for node E one
can hope that Lara will conjecture that this node can
be reached from above or from the left, thus directing
Una, correctly, up or to the left.
In this paper we apply this idea to untangling
braids. However, before we delve into braid theory,
let us explain how this idea could potentially work on
another, more familiar example. Suppose we want to
train an agent to solve the Rubik’s cube. Visualise
a network in which nodes are all possible positions
of the Rubik’s cube (there are about 10
20
of them),
and in which two nodes are connected with an edge
if the nodes can be produced from one another by
one move (that is, one face turn). The network has
a regular structure, with each node connected to its
neighbors by a small number of possible moves. De-
note the solved position of the Rubik’s cube by O.
As described above, we can perform a breadth first
search in the network starting from O. As a rough
estimation, conducting this breadth first search up to
depth d reaches 10
d
nodes. It is known that one needs
20 moves (or 26 moves, depending on the exact def-
inition of moves (Kunkle and Cooperman, 2007)) to
reach every node from O, and it is not feasible to build
a tree containing 10
20
nodes. Realistically, a tree that
one can build would be much smaller, for example, a
tree can contain about 10
7
nodes. Thus, it is impor-
tant that Lara can generalize well from this relatively
small tree to the unfathomably large network.
3 BRAIDS
Braids are mathematical objects from low-
dimensional topology or, to be more precise,
knot theory (that is, the study of the relative position
of curves in the space). A braid on n strands consists
of n ropes whose left-hand ends are fixed one under
another and whose right-hand ends are fixed one
under another; you can imagine that the braid is laid
out on a table, and the ends of the ropes are attached
to the table with nails. Figures 4, 5 show examples
of braids on 3 strands with 10 crossings. Braids are
important because, on the one hand, they are useful
building blocks of knots and other constructions of
low-dimensional topology and, on the other hand,
have a simple structure and can be conveniently
studied using mathematics and, as in this study,
experimented with using computers.
The braids in Figures 4, 5 can be untangled, that is,
all crossings can be removed by moving certain parts
of strands up or down, as needed (without touching
the ends of the ropes); after the braid is untangled, the
braid diagram will look as in Figure 6, which shows
what we will call the canonical trivial braid. Not ev-
ery braid can be untangled. Those braids that can
be untangled are called trivial braids. The task that
we explore in this research is untangling braids using
ideas from Section 2.
When one studies braids (or knots) and how to un-
tangle them, the untangling process is split into el-
ementary local changes, affecting 2 or 3 consecutive
crossings, called Reidemeister moves (Kassel and Tu-
raev, 2008). Somewhat confusingly, the moves for
untangling braids are called the second Reidemeister
move and the third Reidemeister move; there exists a
move called the first Reidemeister move, but it is used
only with knots and not with braids (Lickorish, 2012).
Please see all forms of the second Reidemeister move
in Figures 7, 8. The meaning of each of these figures
is that a braid fragment shown on the left can be re-
placed by a braid fragment shown on the right, or vice
versa.
All forms of the third Reidemeister move are
shown in Figures 9, 10, 11, 12, 13, 14.
As you can see, the second Reidemeister move,
when applied to one of directions, removes two cross-
ings from a braid; thus, if our aim is to untangle
the braid, it seems like a good move to use. How-
ever, not every Reidemeister move removes cross-
ings from a braid; one can say that some Reidemeis-
ter moves (including all versions of the third Reide-
Supervised Learning for Untangling Braids
785

Figure 4: An example of a trivial braid which our agent successfully untangles.
Figure 5: An example of a trivial braid which our agent cannot untangle.
meister move) only prepare groundwork for remov-
ing crossings. Thus, the challenge for artificial intelli-
gence is to learn which Reidemeister moves it should
use to untangle a braid, even though initially it might
be not clear how these moves contribute to untangling
the braid.
Here is how we encode braids in the computer.
Considering a braid from left to right, we record
a clockwise (or anti-clockwise) crossing of strands
in positions i and i + 1 (counting from the bottom)
as the number i (or −i). Thus, for example, the
braid in Figure 5 is encoded as the list of numbers
−2, 1, −1, −1, 1, 1, 2, −2, −1, 2. We were prepared
to transform this encoding into one-hot encoding, if
needed, but so far, we are reasonably successful with
this simple encoding. This list of numbers is fed into
a neural network when Lara is trained. As to Reide-
meister moves, each of them is re-interpreted as an in-
struction stating that a certain two-digit or three-digit
fragment within the braid can be replaced by another
fragment of the same length. For example, the Rei-
demeister move in Figure 7 states that 0 0 can be re-
placed by 1 − 1 (or 2 − 2, etc., depending on which
strands the move is applied to) or vice versa.
For our experiments, we fix the length of the braid,
as we did in our previous research (Khan et al., 2021).
If there is no intersection of strands in a certain part
of a braid, this part of the braid is denoted by 0. Thus,
for example, in the context of braids with up to 10
crossings, the canonical trivial braid (shown in Figure
6) is encoded by the list of 10 0s. Because of this
encoding, we need to add one more kind of moves in
addition to Reidemeister moves, namely, shifting zero
entries in the braid to the left or to the right, as needed;
that is, the fragment i 0 in the braid can be replaced by
0 i or vice versa.
Not every type of Reidemeister move can be ap-
plied at every position in a given braid; for example,
the Reidemeister move in Figure 7 cannot be applied
to the first and the second crossing (counting from the
left) of the braid in Figure 5, but can be applied to
the second and the third crossing of this braid. When
Lara predicts the last move, it predicts a pair, consist-
ing of the type of the move and the position in the
braid where it was applied. Sometimes Lara is wrong
in the sense that this move could not have been ap-
plied at this position in the braid. In this sense, below,
when we discuss how Una should interpret Lara’s pre-
dictions, we discuss how to interpret valid and invalid
moves.
4 MODEL STRUCTURE
As we said in Section 2, our code consists of two main
parts, Lara and Una. The first one, Lara, is an Multi-
Layered Perceptron (MLP) network that predicts the
last move that was made to obtain a given braid. The
second one, Una, is an algorithm that attempts to un-
tangle a given braid by executing a series of moves.
4.1 LARA
This model is used to predict the last move made to a
certain braid. The data generated for Lara comes from
a breath first search tree, as in Figure 2, where there
is only one path from O to any other node. In this
sense, Lara is a single-label multi-class model. The
configuration of this MLP is given by:
• Input layer that receives the array of an encoded
braid.
• Three hidden layers of size 128, 64 and 32, re-
spectively. Each one with ReLU as activation
function.
• Output layer of the the encoded action array, of
length (strands ∗ 2 + 4) ∗ length. with a softmax
activation function.
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
786
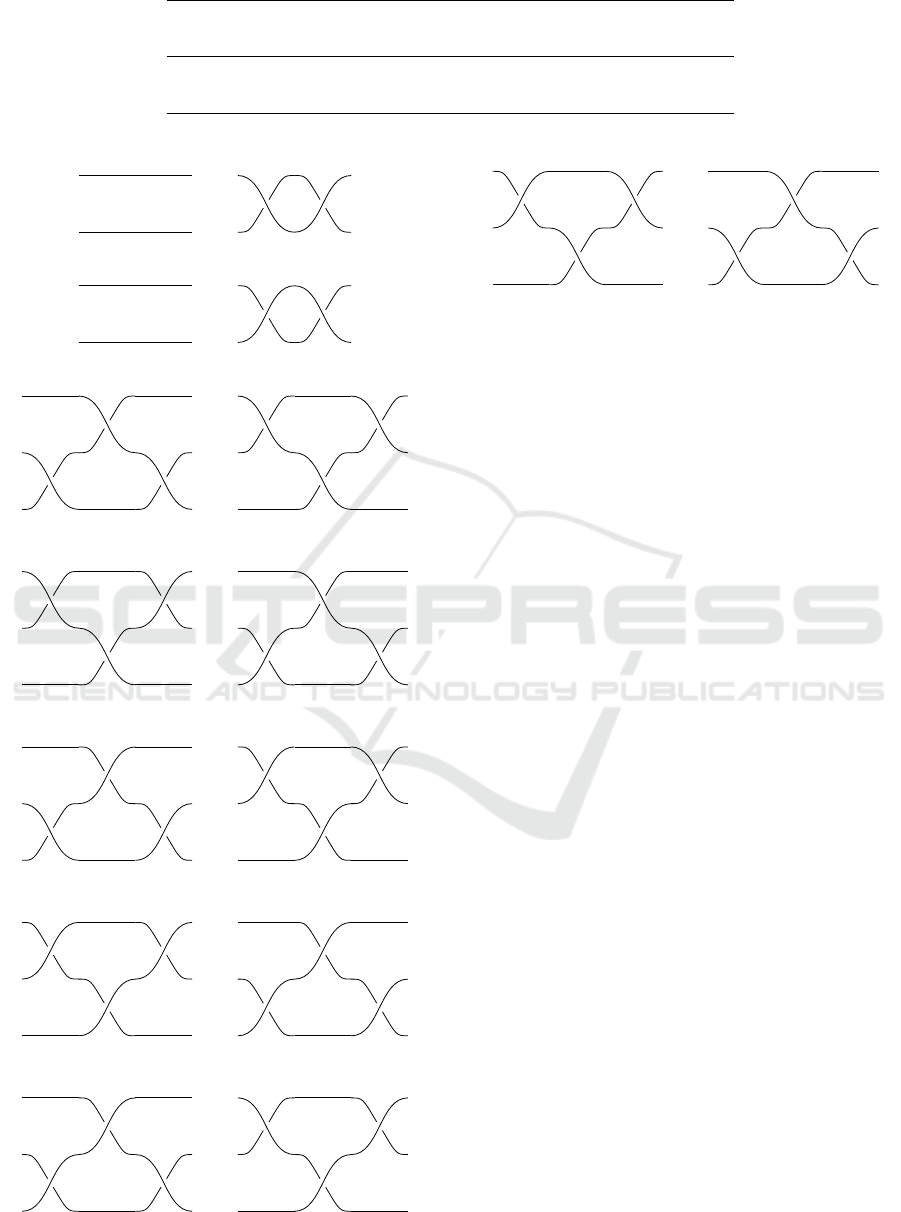
Figure 6: The canonical trivial braid contains no crossings.
Figure 7: Second Reidemeister move (form 1).
Figure 8: Second Reidemeister move (form 2).
Figure 9: Third Reidemeister move (form 1).
Figure 10: Third Reidemeister move (form 2).
Figure 11: Third Reidemeister move (form 3).
Figure 12: Third Reidemeister move (form 4).
Figure 13: Third Reidemeister move (form 5).
Figure 14: Third Reidemeister move (form 6).
We could have trained Lara on all nodes of the
tree; however, we not only train Lara, but also test its
accuracy on a test set. The training and test sets come
from the tree dataset, being randomly chosen 80% and
20% of the nodes, respectively. As you can see in
Table 1, the performance of Lara is very promising,
maintaining overall accuracy above 99%.
After Lara has been trained, the predictions of
Lara need to be sequenced and inverted to use them
to untangle braid, as described below.
4.2 UNA
The purpose of this code is untangling a given braid
by executing a series of moves, namely, the inverses
of the moves produced by Lara. In order to test our
Lara/Una architecture, We wrote several versions of
Una, depending on how much they trust Lara’s output
and how they interpret it:
• Random (U NA
R
): Una performs a randomly cho-
sen valid move without consulting Lara.
• Valid or random (UNA
V
): Una executes the rec-
ommended move from Lara if the recommended
move is valid; otherwise, Una performs a ran-
domly chosen valid move (like UNA
R
).
• Best valid move (UNA
B
): Una executes, out of all
valid moves available, the one that is ranked most
highly by Lara.
• Tree only (UNA
T
): Una executes the recom-
mended action from Lara (like UNA
B
) if the cur-
rently considered braid belongs to the tree on
which Lara was trained. If the braid does not
belong to the tree, Una executes a random valid
move (like UNA
R
).
Every version works until it reaches one of two
situations. The first one is when the braid is com-
pletely untangled; then it is a success. The second
Supervised Learning for Untangling Braids
787

one is when the current braid has already been vis-
ited; then it is a failure
1
.
5 EXPERIMENTS
To test the different versions of Una, we used a dataset
of randomly generated braids that do not necessarily
belong to the tree of braids created to train Lara. (To
be more precise, the randomly generated braids in the
test set are unlikely to be in the tree because we only
include braids without 0s, in other words, braids with
the maximal number of crossings, in the test set.) In
Table 1, we show the size of the braids used in the
experiments (the length and the number of strands),
the size of the tree used to train Lara (the depth and the
number of nodes), the total number of trivial braids in
the network containing the tree, Lara’s accuracy (on
the test set separated within the tree), and the success
rate of different implementations of Una.
The training set of Lara is represented in the Tree
size column. For length 8, this training set goes from
11% to 61% of the all braids. The test set of Una is
represented in the Test size column, and for length 8
it is 21% of all braids. For length 10, Lara’s training
set goes from 2% to 30%, with a test set of Una of
around 5% of all braids. Finally, with length 12 the
training set of Lara goes from 0.2% to 3.2% with the
test set of Una of 0.6% of all braids.
This data enables us to answer two research ques-
tions which we asked ourselves. Do Lara and Una,
between the two of them, learn something useful
about untangling braids? The answer is yes, because
the performance of the version of Una making random
moves, UNA
R
, is much lower than the performance of
all other versions of Una, which benefit from learning.
Can Lara, after having been trained on a tree, gener-
alize this knowledge usefully to the braids it has not
been trained on? The answer is yes, because the per-
formance of the versions of Una that use Lara’s advice
outside the tree, UNA
V
and UNA
B
, are noticeably bet-
ter than the performance of the version of Una that
does not use Lara’s advice outside the tree, UNA
T
.
The performance of these models is calculated
with an accuracy ratio of the successfully untangled
braids over the total braids tested. For example, with
length 8 and depth 7, UNA
V
is able to untangle 74%
of the testing set braids.
1
We could have expanded our experiments to allowing
Una to visit the same node repeatedly and choose a different
random action each time it happens. However, these non-
deterministic approaches are of little interest to us, because
our main aim is to test how much Lara’s advice helps Una
in untangling the braid.
Although our experiment results make us suffi-
ciently confident to formulate the general conclusions
stated in the previous paragraph, we can report that
specific numbers are noisy and depend on the ran-
domness in the training of Lara. For braids of length
8, we ran each experiment (including training Lara)
several times, and results are different; please see Ta-
ble 2 showing how the performance of Una changes
depending on Lara. The first 4 rows in Table 2 are the
numbers from Table 1, and the next 4 rows are the
same experiments, but repeated with newly trained
Lara’s neural networks. The bottom 4 rows in Table
2 are the same experiments again, with longer trained
Lara’s neural networks.
From the mathematical point of view, we know
that only at the distance of 6 moves from O the third
Reidemeister move can be first applied. For instance,
for length 10, the 24, 191 braids in the tree of depth 5
do not include any braids that require the third Reide-
meister move to be untangled, so Lara trained on this
dataset has never encountered any version of the third
Reidemester move applied. Accordingly, we can see,
for example, that for length 10 there is a clear im-
provement between depth 5 and 6, with the success
rate of both UNA
V
and UNA
B
improving almost two
times.
6 RELATED WORK
A Reinforcement Learning approach was attempted
for the same problem in previous research that we de-
veloped. Using Policy Gradient with a MLP we gave
a negative reward for every step the agent made in
order to encourage time efficiency. A comparative re-
sult is the RL approach obtained an accuracy of 22%
for untangling braids of 3 strands and 12 crossings.
In this sense, this Supervised Learning approach im-
proves that accuracy to 27% with UNA
B
, for example.
Multiple- and single-agent reinforcement learning
was applied to untangling braids in our earlier work
(Khan et al., 2021; Khan et al., 2022). The method
proposed in this paper demonstrates better perfor-
mance of untangling on comparable sizes of braids.
A closely related problem (with a slightly ex-
tended list of Reidemeister moves) is untangling
knots presented as closed braids. A range of single-
agent reinforcement learning methods was used in
(Gukov et al., 2021) to solve that problem. The
best accuracy (about 85% of braids untangled) was
reported for the trust region policy optimization
(TRPO) method. Although that is a not the same un-
tangling problem as the one we consider in this paper,
it is encouraging to see that this accuracy is compara-
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
788
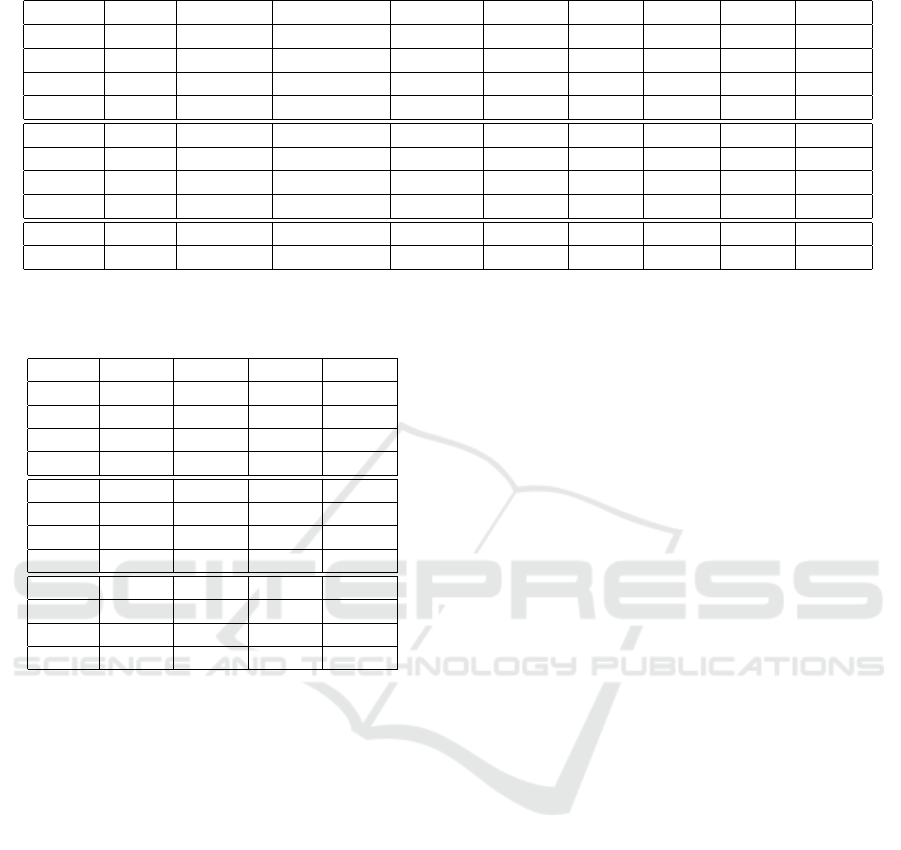
Table 1: Results of Una versions using different depths to train Lara. All experiments are with braids with 3 strands.
Length Depth Tree size Total braids Test size LARA UNA
R
UNA
V
UNA
B
UNA
T
8 3 1,271 11,317 2,400 99.30% 16% 52% 18% 30%
8 5 3,919 11,317 2,400 99.48% 16% 46% 59% 43%
8 6 5,639 11,317 2,400 97.36% 16% 64% 80% 62%
8 7 6,963 11,317 2,400 99.44% 16% 74% 64% 57%
10 3 3,455 191,645 10,000 99.12% 6% 32% 16% 18%
10 5 24,191 191,645 10,000 99.92% 6% 26% 33% 14%
10 6 38,759 191,645 10,000 99.85% 6% 51% 65% 36%
10 7 57,947 191,645 10,000 99.63% 6% 60% 54% 35%
12 3 7,367 3,427,517 20,000 99.52% 2% 18% 11% 8%
12 5 112,559 3,427,517 20,000 99.07% 2% 20% 27% 10%
Table 2: Experiments run two times with different NNs.
Depth U NA
R
UNA
V
UNA
B
UNA
T
3 16% 52% 18% 30%
5 16% 46% 59% 43%
6 16% 64% 80% 62%
7 16% 74% 64% 57%
3 16% 53% 27% 40%
5 16% 61% 77% 56%
6 16% 58% 72% 51%
7 15% 41% 37% 32%
3 16% 53% 27% 40%
5 16% 65% 77% 56%
6 15% 70% 85% 63%
7 15% 81% 81% 69%
ble with the best results we have achieved in our ex-
periments, with arguably a simpler off-line learning
approach.
7 CONCLUSION
We demonstrate that although Lara is only trained on
a small tree inside the network (that is, the network
of braids connected by actions), using Lara’s advice
when performing actions considerably increases the
probability of reaching the canonical trivial braid (that
is, untangling the braid).
As described in the end of Section 2, this approach
can be applied to other problems, too, in place of re-
inforcement learning.
In the future, we will extend our approach to
untangling knots presented as closed braids, as in
(Gukov et al., 2021); one specific challenging exam-
ple to tackle is the one presented in (Morton, 1983).
In addition to this, we want to untangle knots pre-
sented in a different form, called the plat represen-
tation of knots (Birman, 1976).
ACKNOWLEDGEMENTS
The work was supported by the Leverhulme Trust Re-
search Project Grant RPG-2019-313.
REFERENCES
Birman, J. S. (1976). On the stable equivalence of plat rep-
resentations of knots and links. Canadian Journal of
Mathematics, 28(2):264–290.
Gukov, S., Halverson, J., Ruehle, F., and Sułkowski, P.
(2021). Learning to unknot. Machine Learning: Sci-
ence and Technology, 2(2):025035.
Ho, J. and Ermon, S. (2016). Generative adversarial imi-
tation learning. Advances in neural information pro-
cessing systems, 29.
Kassel, C. and Turaev, V. (2008). Braid groups, volume
247. Springer Science & Business Media.
Khan, A., Vernitski, A., and Lisitsa, A. (2021). Untan-
gling braids with multi-agent Q-learning. In 23rd In-
ternational Symposium on Symbolic and Numeric Al-
gorithms for Scientific Computing (SYNASC), pages
135–139.
Khan, A., Vernitski, A., and Lisitsa, A. (2022). Rein-
forcement learning algorithms for the untangling of
braids. In Bart
´
ak, R., Keshtkar, F., and Franklin,
M., editors, Proceedings of the Thirty-Fifth Interna-
tional Florida Artificial Intelligence Research Society
Conference, FLAIRS 2022, Hutchinson Island, Jensen
Beach, Florida, USA, May 15-18, 2022.
Kunkle, D. and Cooperman, G. (2007). Twenty-six moves
suffice for rubik’s cube. In Proceedings of the 2007
international symposium on Symbolic and algebraic
computation, pages 235–242.
Lickorish, W. R. (2012). An introduction to knot theory,
volume 175. Springer Science & Business Media.
Morton, H. R. (1983). An irreducible 4-string braid with un-
knotted closure. In Mathematical Proceedings of the
Cambridge Philosophical Society, volume 93, pages
259–261. Cambridge University Press.
Sutton, R. S. and Barto, A. G. (2018). Reinforcement learn-
ing: An introduction. MIT press.
Supervised Learning for Untangling Braids
789
