
A Bi-Level Genetic Algorithm to Solve the Dynamic Flexible Job Shop
Scheduling Problem
Mohamed Dhia Eddine Saouabi
1 a
, Houssem Eddine Nouri
1,2 b
and Olfa Belkahla Driss
1,3 c
1
Univ. Manouba, ENSI, LARIA UR22ES01, Campus Universitaire Manouba, 2010, Tunisia
2
Univ. Gabes, ISGG, Rue Omar Ibn Khattab, 6029, Gabes, Tunisia
3
Univ. Manouba, ESCT, Campus Universitaire Manouba, 2010, Tunisia
Keywords:
Flexible Job Shop Scheduling Problem, Dynamic Scheduling, Genetic Algorithm, Bi-Level Optimization,
Job insertion, Rescheduling.
Abstract:
The dynamic flexible job shop scheduling problem (DyFJSP) is an extension of the flexible job scheduling
problem (FJSP) as the production environment is characterized by a set of disturbances that require a method
capable of reacting in real time in order to generate an efficient schedule in case of production failure. In
this paper, we propose a bi-level genetic algorithm (BLGA) to solve the DyFJSP in order to minimize the
maximum completion time (Makespan). The dynamic scenario taken into account in this work is job insertion.
To evaluate the performance of our approach, we carry out experiments on Brandimarte benchmark instances.
The results of the experiments show that the BLGA is characterized by its efficiency and performance in
comparison with other methods published in the literature.
1 INTRODUCTION
With the great evolution of the production environ-
ment characterized by competition and the strict de-
mands of customers, the improvement of industrial
managing tools has become a persistent need to meet
the limits of traditional disciplines (Martinsons and
Davison, 2007). One of the most important manage-
ment instruments in the decision-making of manufac-
turing is the production scheduling. This tool is con-
sidered as a vital link that transfers the flow between
the operational and tactical levels within the company.
Indeed, the scheduling function manages all the avail-
able resources and resolves conflicts caused by the
implementation of product lines over the estimated
time horizon. For this reason, studying this problem
in the field of optimization is becoming increasingly
important and it is interesting to implement practical
solutions and manage the expectations of decision-
makers in various areas (Wiers, 1997) such as the lo-
gistic field in order to schedule a list of operations
to produce a set of jobs, or in the field of health-
care in order to affect resources with the aim of carry
a
https://orcid.org/0000-0003-3272-513X
b
https://orcid.org/0000-0003-0901-1278
c
https://orcid.org/0000-0003-3077-6240
out a list of medical operations. One of the schedul-
ing problems that has been studied extensively in re-
cent years is the flexible job shop scheduling prob-
lem. This type of workshop problem is an exten-
sion of the classic job shop problem, it is character-
ized by the ability to perform each operation by one
or more alternative machines with different process-
ing times, whose objective is to determine the order
of operations and assigning them to machines (Xie
et al., 2019). Because of the high complexity of the
FJSP, known as NP-hard (Garey et al., 1976), sev-
eral approaches are proposed as optimization tools of
this type of problems, with the aim of minimize one
or more objectives considered as performance crite-
ria in each study. We cite the following studies to
solve the FJSP, a hybrid metaheuristics-based multi-
agent model (Nouri et al., 2018), multi-agent model
based on combination of chemical reaction optimiza-
tion metaheuristic with tabu search (Marzouki et al.,
2018) and a genetic algorithm combined with tabu
search in a holonic multi-agent model (Nouri et al.,
2015). Although these scheduling methods prove
their performance when offered for the static work-
shop, they lose their efficiency when applied in a dy-
namic production environment characterized by dis-
turbances like the insertion or cancellation of jobs, the
breakdowns or conflicts between machines, and the
752
Saouabi, M., Nouri, H. and Belkahla Driss, O.
A Bi-Level Genetic Algorithm to Solve the Dynamic Flexible Job Shop Scheduling Problem.
DOI: 10.5220/0011773300003393
In Proceedings of the 15th International Conference on Agents and Artificial Intelligence (ICAART 2023) - Volume 3, pages 752-759
ISBN: 978-989-758-623-1; ISSN: 2184-433X
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

problems related to the workers such as their fatigue
and absences (Mohan et al., 2019). In this paper, we
are interested in dynamic flexible job shop scheduling
problem (DyFJSP), which is defined as a production
environment characterized by the job insertion during
the production process. which require the implemen-
tation of an effective model to ensure the continuity of
the production process in the flexible job shop. In the
literature, several studies which focus on the mono-
objective optimization of the DyFJSP are published.
To minimize the makespan, (Zhang and Wong, 2017)
proposed a multi agent system combined with an ant
colony optimization method to solve this problem in
a dynamic workshop described by the rush orders,
the job cancellation, and the machine breakdown or
repair. (Li et al., 2017) used a hybrid artificial bee
colony algorithm in a workshop characterized by job
insertion, machine failure, and job cancellation. In
addition, (Long et al., 2022), (Mihoubi et al., 2021)
and (Ali et al., 2020) focused on the job insertion sce-
nario and proposed a dynamic self learning artificial
bee colony, genetic algorithm combined with a hy-
brid neuronal surrogate and an improved genetic algo-
rithm as a scheduling algorithm respectively. And to
minimize the mean weighted tardiness in the DyFJSP
with the job insertion scenario, (Fan et al., 2021) used
a genetic programming based hyper heuristic as a
scheduling algorithm. We notice that the makespan is
the most important objective studied in the literature.
For this reason, we are interested in this work to min-
imize this criterion when solving the dynamic flexi-
ble job shop scheduling problem. We also notice that
dynamic events related to jobs are the most disrup-
tive in the production system. The remainder of this
article is organized as follows. Section 2 formulates
the DyFJSP with new job insertion, the model pro-
posed to optimize this problem is described in section
3. Next, an application of the proposed approach to
solve the DyFJSP is presented in section 4. Then, the
experimental study is shown in section 5 to verify the
efficiency of our proposed approach and compare its
performance with other existing algorithms. Finally,
some conclusions and perspectives are presented in
section 6.
2 PROBLEM FORMULATION
In this paper, we aim to solve the dynamic and flex-
ible job shop scheduling problem (DyFJSP) which is
an extension of the flexible job shop scheduling prob-
lem (FJSP). The FJSP is formulated as follow. There
is a set of n jobs J= {J
1
,...,J
n
} to be realized by a set
of m machines M={M
1
,...,M
m
}, such as each job J
i
is
defined by a sequence of k operations {O
i,1
,...,O
i,k
}
to be executed successively. We notice that each op-
eration can be performed by a list of alternative ma-
chines with different processing times p
i, j,m
, where i
is the index of the job, j is the index of the operation
and m is the index of the machine. The main objective
of this problem is to minimize the maximum comple-
tion time which is the makespan. This performance
criterion is defined by C
max
. (See (1)), where C
i
is the
completion time of the job J
i
.
minC
max
= max
1<i<n
(C
i
) (1)
The FJSP problem is composed by two sub-problems
which are the determination of the optimal sequenc-
ing of operations and the assignment of machines for
the execution of operations. In a dynamic production
environment, the flexible job shop scheduling prob-
lem becomes dynamic and will be characterized by
the possibility of inserting jobs at a random time be-
fore the makespan. So the assumptions considered in
the DyFJSP are the following:
• All the machines are available at time zero.
• The independence of machines between them-
selves.
• Machines are available until the end of the sched-
ule.
• A machine can only perform one operation at a
given moment.
• The definition of jobs is determined before the
start of the schedule.
• Jobs are independent of each other.
• The execution of a job can only be on one machine
at a time.
• A running operation cannot be interrupted
• Jobs are allowed to wait for resources as long as
necessary.
• The production environment is characterized by
the insertion of new jobs.
• Disturbances are characterized by their timing.
3 THE BI-LEVEL GENETIC
ALGORITHM
To solve the DyFJSP, we propose a Bi-Level Genetic
Algorithm, denoted by BLGA, based on the bi-level
optimization design, which is defined as a specific
type of optimization where a problem is integrated
(nested) within another. The outer optimization task
A Bi-Level Genetic Algorithm to Solve the Dynamic Flexible Job Shop Scheduling Problem
753
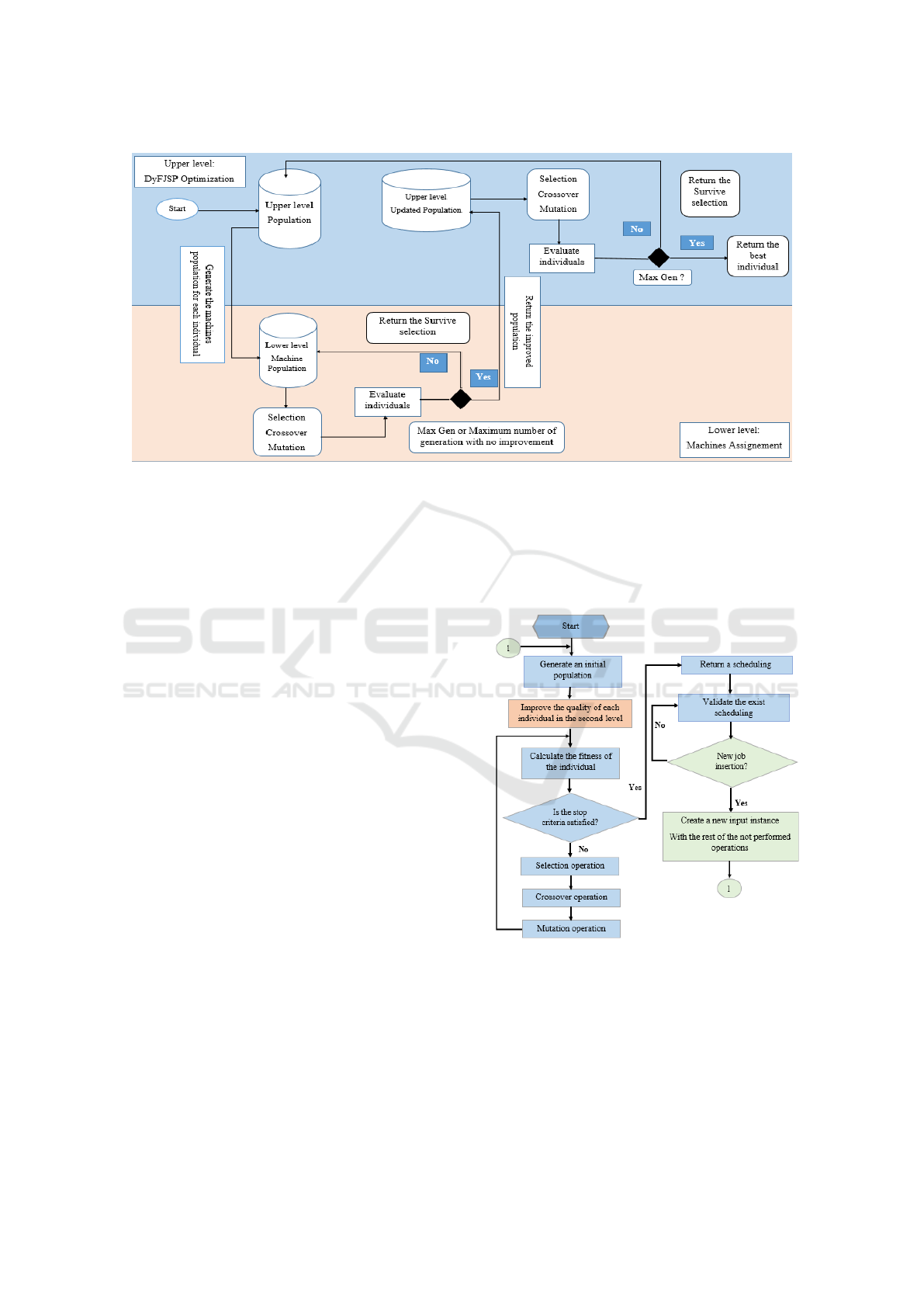
Figure 1: The description of bi-level genetic algorithm.
is commonly referred to as the upper-level optimiza-
tion task, and the inner optimization task is commonly
referred to as the lower-level optimization task (Zadeh
et al., 2018). We note that each level has its objec-
tives, constraints, and variables.
Our method BLGA can be defined by modeling two
levels of optimization as shown in Figure 1. In each
level, we use the genetic algorithm. In the upper level,
we seek the optimization of the general problem, and
in the lower level, our objective is the optimal allo-
cation of machines to carry out the workshop opera-
tions.
The upper level can be described as follows:
• A randomly generated initial population. Such as
each individual of the population is defined with
the operations sequence chromosome (OS) and
the machines sequence chromosome (MS).
• Application of the selection, two points crossover,
and mutation operators.
• Return the best scheduling.
The lower level is included just before the selection
phase and it allows us to improve the quality of each
individual generated randomly in the previous phase.
In this level, the OS chromosome of operations is
fixed and improvements are made on the MS chro-
mosome of machines. This improvement is described
as follows for each individual:
• Removal of the initial MS chromosome.
• Generation of a new machines population.
• Application of the selection, two points crossover,
and mutation operators.
• Return the improved individual.
We present two flowcharts, see Figures 2 and 3, that
illustrate the general approach and the lower level al-
gorithm successively.
Figure 2: The flowchart of the bi-level genetic algorithm.
4 APPLICATION OF THE BLGA
We consider the dynamic flexible job shop, which is
composed by four Jobs J
1
, J
2
, J
3
, and J
4
and five ma-
chines M
1
, M
2
, M
3
, M
4
, and M
5
. The jobs are defined
as follows: J
1
: [O
11
, O
12
, O
13
]
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
754
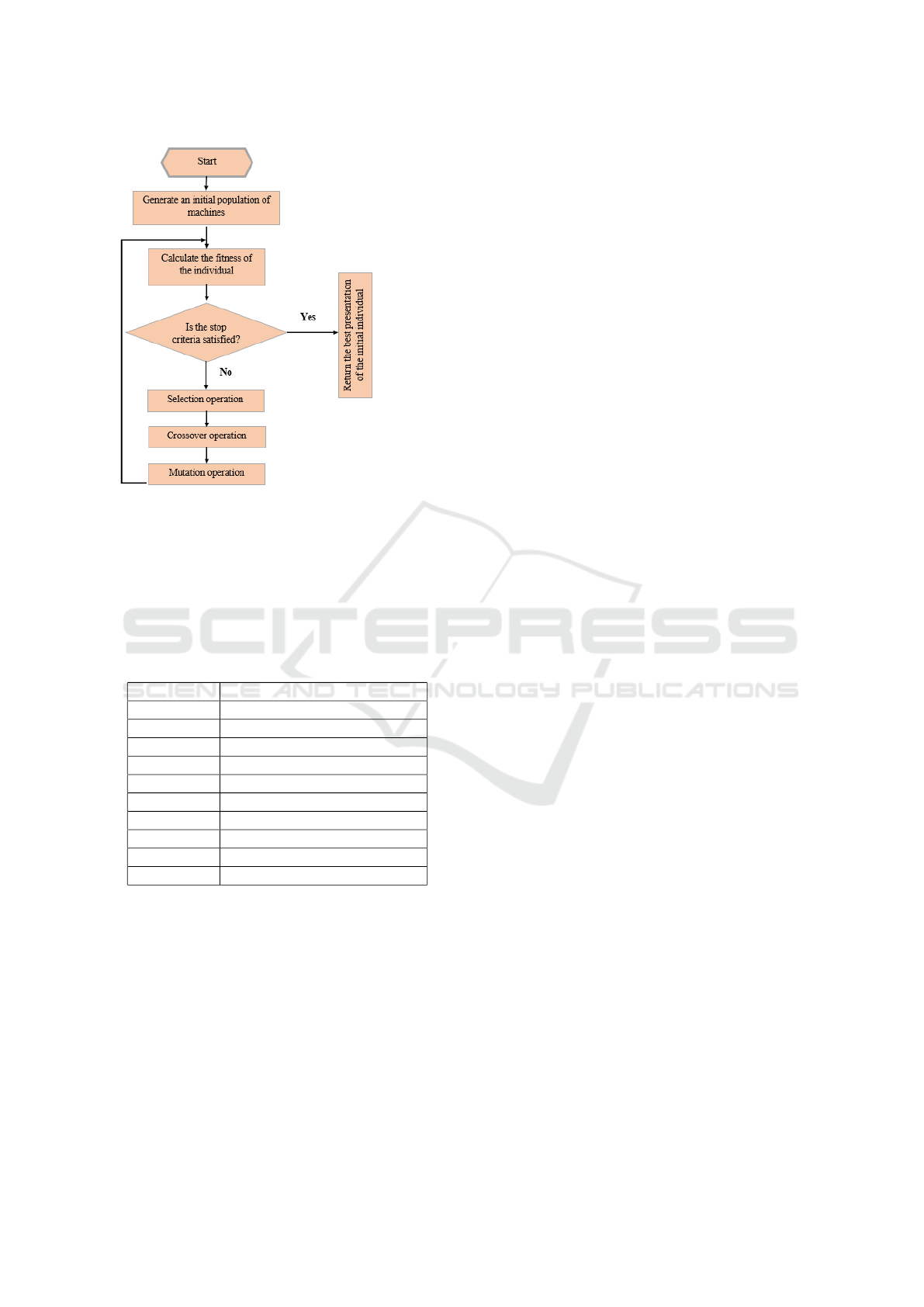
Figure 3: The flowchart of the lower level.
J
2
: [O
21
, O
22
]
J
3
: [O
31
, O
32
]
J
4
: [O
41
, O
42
, O
43
]
We present below in Table 1 the list of the alternative
machines for each operation and the processing time
required for each operation on that machine.
Table 1: List of the alternative machines for each operation.
Operations List of alternatives machines
O
11
{ M
2
(4), M
4
(3)}
O
12
{ M
3
(3), M
4
(5), M
5
(2)}
O
13
{ M
1
(2), M
2
(2), M
4
(1)}
O
21
{ M
1
(4), M
3
(3)}
O
22
{ M
2
(5)}
O
31
{ M
1
(1), M
2
(2), M
3
(1)}
O
32
{ M
3
(2), M
4
(3)}
O
41
{ M
2
(3), M
4
(5)}
O
42
{ M
1
(4), M
3
(3), M
4
(2)}
O
43
{ M
2
(5), M
4
(6)}
4.1 Solution Encoding
For the encoding of the solution, we choose two chro-
mosomes called MS and OS, as MS is the chromo-
some that represents the assignment of machines for
each operation, and the OS chromosome for the rep-
resentation of the order of operations.
4.1.1 MS Chromosome
As each Job is composed of operations assigned to
machines to be performed. The MS chromosome is
constructed as follows:
We start by assigning machines to the operations of
the first job while respecting the order of the opera-
tions of this job, and we redo the same procedure job
by job. We note that each machine is represented by
its index in the list of machines allocated to perform
the operation. See Figure 4.
4.1.2 OS Chromosome
The OS chromosome is reserved for the represen-
tation of the sequencing of operations and is con-
structed as follows, see Figure 5:
• Each gene on the chromosome contains a number
that symbolizes a job.
• Each job appears in the chromosome k times such
as k is the number of their operations.
• The operations of the job J are presented in the
chromosome by the order of appearance of the job
J index.
4.2 Implementation of The BLGA
We demonstrate in the rest of this section the imple-
mentation of the algorithm with the example shown
above:
Step 1 (Upper Level): We suppose a population P of
size 3 individuals:
I
1
= {OS
1
, MS
1
}, I
2
= {OS
2
, MS
2
} and I
3
= {OS
3
,
MS
3
}. See Figure 6.
i = 0
While i < 3
Do: Step 1 (Lower Level): Generation of 3 machines
individuals for the individual (i=0) generate in the first
step of the upper level. I
1
= {MS
11
, MS
12
, MS
13
} I
11
= {OS
1
, MS
11
} (See Figure 7).
I
12
= {OS
1
, MS
12
} (See Figure 8).
I
13
= {OS
1
, MS
13
} (See Figure 9).
Step 2 (Lower Level):
• Calculate fitness for each individual.
• Application of the selection operator:
We select I
11
and I
12
.
Step 3 (Lower Level): Application of the two points
crossover operator. (See Figure 10).
Step 4 (Lower Level): Application of the mutation
operator. (See Figure 11).
Step 5 (Lower Level): Calculate fitness value and
return the best individual for the first individual of the
A Bi-Level Genetic Algorithm to Solve the Dynamic Flexible Job Shop Scheduling Problem
755
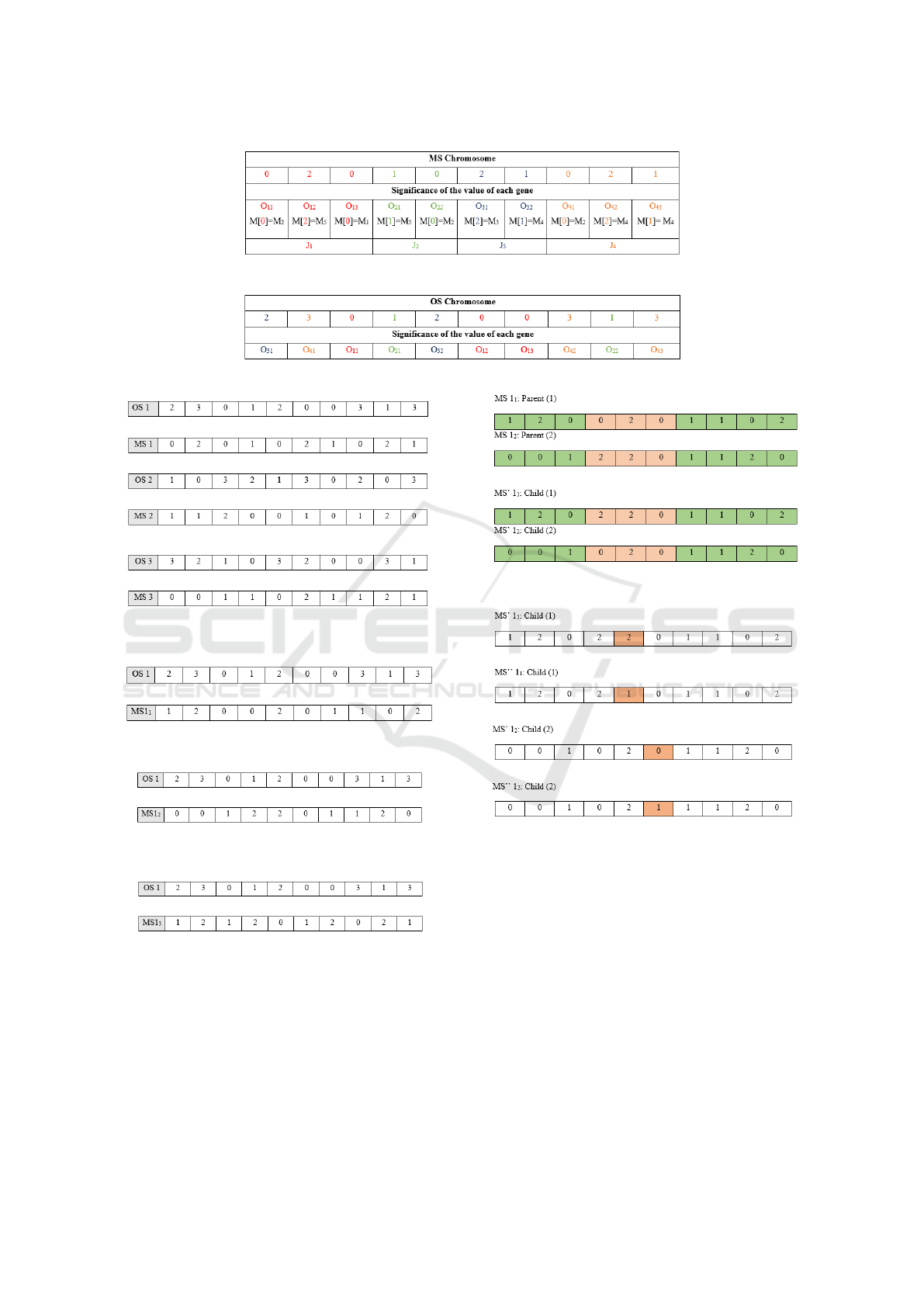
Figure 4: The representation of the MS chromosome.
Figure 5: The representation of the OS chromosome.
Figure 6: OS & MS chromosomes of the three individuals
I
1
, I
2
, I
3
.
Figure 7: The first MS
11
chromosome of the first individual
I
1
generate in the upper level.
Figure 8: The second MS
12
chromosome of the first indi-
vidual I
1
generate in the upper level.
Figure 9: The third MS
13
chromosome of the first individual
I
1
generate in the upper level.
upper level to be saved as an element of the population
P.
i++ Step 2 (Upper level):
• Calculate the fitness value for each individual of
the new population improved in lower level.
• Application of the selection operator: We select I
1
and I
2
Figure 10: Application of the two points crossover in the
lower level.
Figure 11: Application of the mutation in the lower level.
Step 3 (Upper Level): Application of the two points
crossover operator.
Step 4 (Upper Level): Application of the mutation
operator.
Step 5 (Upper Level): Evaluate each individual of
the population and return the best scheduling.
5 EXPERIMENTAL STUDY
In this section, we present the experiments carried
out on the DyFJSP in order to minimize the objective
function C
max
(Makespan).
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
756

5.1 Experiment Design
The proposed BLGA is implemented in java language
on a 2.00 GHz Intel® Core (TM) i3-5005U and 6GB
of RAM memory, where we use the integrated devel-
opment environment (IDE) “IntelliJ”. As a parameter
for the algorithm used to solve the DyFJSP, the values
of population size, crossover and mutation probabil-
ity, number of generations, perturbation probability,
and maximum generation with no improvement are
adjusted experimentally. The appropriate parameters
of the two levels are shown below in Table 2.
Table 2: The appropriate parameters for our approach.
Levels Parameters
Population Size = 300
Crossover probability = 0.98
Upper
Mutation probability = 0.01
Generations = 500
max generation with no improvement = 80
Perturbation probability = 0.40
Population Size = 300
Crossover probability = 0.98
Lower
Mutation probability = 0.01
Generations = 100
max generation with no improvement = 20
5.2 Performance of the BLGA
In this subsection, we will present the experimental
results developed using the BLGA. First, we will fo-
cus on the performance of our approach by comparing
their result with other approaches in the literature, and
then we will test the ability of our method to solve the
dynamic scenario in the next subsection.
5.2.1 Benchmark Instances
For the performance tests of the proposed approach,
we worked on the Brandimarte (Brandimarte, 1993)
benchmark instances. This benchmark is used for the
FJSP. But due to the absence of specific benchmarks
for dynamic and flexible problems, we worked on
this benchmark and we insert a new job at a given
moment T for the job insertion scenario based on
the work of (Long et al., 2022). To measure the
performance of our approach in minimizing the C
max
criterion, we will compare the results of BLGA with
other algorithms.
5.2.2 Comparison of the BLGA Results With
Other Algorithms
To test the performance of our approach, we will
compare the results of BLGA obtained in the flexi-
ble scheduling phase with those of other algorithms
used in the existing literature which worked with
the Brandimarte benchmark, including SLABC (Long
et al., 2022), IPSO (Ding and Gu, 2020), SLGA (Chen
et al., 2020), MACROG (Marzouki et al., 2017),
MAPSO (Nouiri et al., 2018) and GATS+HM (Nouri
et al., 2015).
The next Table 3, presents the best values obtained
by these algorithms cited above to resolve the Brandi-
marte benchmark instances. Such as the HOV repre-
sents the optimal historical value of each instance. We
note that the scale of each instance is defined by the
number of jobs (n) and the number of machines (m).
By analyzing the Table 3 we note that the use of
the BLGA gives more optimized results in 5 instances
of the Brandimarte benchmark compared to the other
algorithms used for comparison in this paper.
5.3 Experimental Results of the BLGA
on Job Insertion Scenario
This part is reserved for the presentation of the test
performed on dynamic event characterized by the in-
sertion of a new job that require a rescheduling of the
initial scheduling.
We will use a scenario posed by (Long et al., 2022)
which consists in inserting an 11
th
job to the MK02
instance of the Brandimarte benchmark at the moment
T= 12. This job is defined in Table 4.
First, we will start with an initial scheduling of
the MK02 instance. This scheduling is presented in
Figure 12.
In Figure 13, we present the final scheduling of
the MK02 instance with the insertion of job 11.
The BLGA application generates a C
max
= 30 for
dynamic scheduling characterized by the insertion of
a new job in the MK02 instance of the Brandimarte
benchmark. In the other side the DSLABC (Long
et al., 2022) returns a C
max
= 38, so we notice that
our approach is more appropriate for optimizing this
type of problem.
6 CONCLUSIONS AND
PERSPECTIVES
Over the past decade, many research efforts have been
devoted to dynamic scheduling. The objective is to
A Bi-Level Genetic Algorithm to Solve the Dynamic Flexible Job Shop Scheduling Problem
757
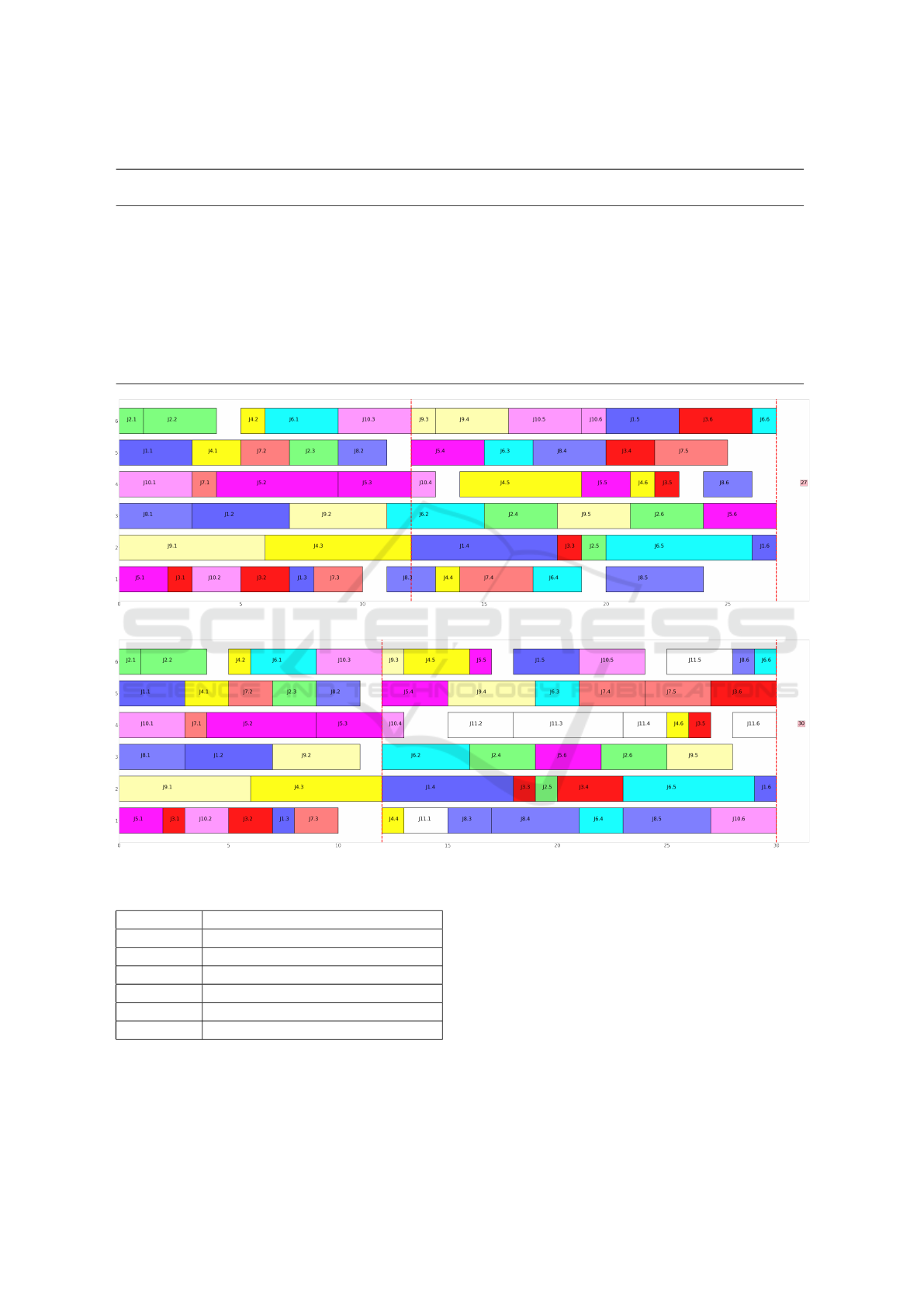
Table 3: The best value obtained by seven algorithms to solve 10 Brandimarte instances.
Instance Scale (n ∗ m) HOV
Algorithms
SLABC IPSO SLGA MACROG MAPSO GATS+HM BLGA
MK01 10 x 6 36 42 40 40 40 41 40 40
MK02 10 x 6 24 29 29 27 32 26 27 27
MK03 15 x 8 204 204 204 204 204 207 204 204
MK04 15 x 8 48 67 66 60 64 65 64 62
MK05 15 x 4 168 175 175 172 179 171 173 173
MK06 10 x 15 33 80 77 69 85 61 65 64
MK07 20 x 5 133 155 145 144 172 173 144 142
MK08 20 x 10 523 523 523 523 552 523 523 523
MK09 20 x 10 299 364 320 320 421 307 311 310
MK10 20 x 15 165 283 239 254 358 312 222 220
Figure 12: The initial scheduling of MK02.
Figure 13: The final scheduling of MK02 with job insertion.
Table 4: The operations of the new job.
Operations M1 M2 M3 M4 M5 M6
O
11−1
2 - 5 3 3 -
O
11−2
- 3 - 3 5 4
O
11−3
- 6 3 5 - -
O
11−4
4 1 - 2 5 3
O
11−5
- 5 2 4 - 3
O
11−6
5 6 3 2 - 4
contribute to a more productive and efficient func-
tioning of a manufacturing company in the face of
an ever-changing market environment. In this paper,
we present a bi-level genetic algorithm, called BLGA,
for the dynamic flexible job shop scheduling problem
(DyFJSP). In this approach, we used two levels for the
optimization of the DyFJSP by the upper level and
the optimization of the assignment of the machines
by the lower level respectively. The main objective
of this paper is to minimize the makespan in a dy-
namic flexible job shop characterized by the insertion
of jobs. The experimental results show that the pro-
posed approach is efficient in comparison with other
approaches used to solve the FJSP and also show that
the BLGA can resolve the perturbation in the DyFJSP.
As future work, we plan to work towards optimiz-
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
758

ing other objectives. To achieve this, a method dedi-
cated to solving multi-objective problems should be
applied in order to produce more useful results in
terms of the objectives that will be considered in fu-
ture work on this production environment. Another
perspective to consider is the improvement of our ap-
proach to be capable to solve scheduling problems
with transportation in a dynamic environment char-
acterized by other dynamic events such as machines
or robot breakdowns.
REFERENCES
Ali, K. B., Telmoudi, A. J., and Gattoufi, S. (2020).
Improved genetic algorithm approach based on new
virtual crossover operators for dynamic job shop
scheduling. IEEE Access, 8:213318–213329.
Brandimarte, P. (1993). Routing and scheduling in a flex-
ible job shop by tabu search. Annals of Operations
research, 41(3):157–183.
Chen, R., Yang, B., Li, S., and Wang, S. (2020). A self-
learning genetic algorithm based on reinforcement
learning for flexible job-shop scheduling problem.
Computers & Industrial Engineering, 149:106778.
Ding, H. and Gu, X. (2020). Improved particle swarm opti-
mization algorithm based novel encoding and decod-
ing schemes for flexible job shop scheduling problem.
Computers & Operations Research, 121:104951.
Fan, H., Xiong, H., and Goh, M. (2021). Ge-
netic programming-based hyper-heuristic approach
for solving dynamic job shop scheduling problem
with extended technical precedence constraints. Com-
puters & Operations Research, 134:105401.
Garey, M. R., Johnson, D. S., and Sethi, R. (1976).
The complexity of flowshop and jobshop scheduling.
Mathematics of operations research, 1(2):117–129.
Li, X., Peng, Z., Du, B., Guo, J., Xu, W., and Zhuang, K.
(2017). Hybrid artificial bee colony algorithm with
a rescheduling strategy for solving flexible job shop
scheduling problems. Computers & Industrial Engi-
neering, 113:10–26.
Long, X., Zhang, J., Zhou, K., and Jin, T. (2022). Dynamic
self-learning artificial bee colony optimization algo-
rithm for flexible job-shop scheduling problem with
job insertion. Processes, 10(3):571.
Martinsons, M. G. and Davison, R. M. (2007). Strategic de-
cision making and support. Decision support systems,
43(1):284–300.
Marzouki, B., Driss, O. B., and Gh
´
edira, K. (2017). Multi
agent model based on chemical reaction optimization
with greedy algorithm for flexible job shop scheduling
problem. Procedia Computer Science, 112:81–90.
Marzouki, B., Driss, O. B., and Gh
´
edira, K. (2018). Multi-
agent model based on combination of chemical reac-
tion optimisation metaheuristic with tabu search for
flexible job shop scheduling problem. International
Journal of Intelligent Engineering Informatics, 6(3-
4):242–265.
Mihoubi, B., Bouzouia, B., and Gaham, M. (2021). Reac-
tive scheduling approach for solving a realistic flexi-
ble job shop scheduling problem. International Jour-
nal of Production Research, 59(19):5790–5808.
Mohan, J., Lanka, K., and Rao, A. N. (2019). A review
of dynamic job shop scheduling techniques. Procedia
Manufacturing, 30:34–39.
Nouiri, M., Bekrar, A., Jemai, A., Niar, S., and Ammari,
A. C. (2018). An effective and distributed particle
swarm optimization algorithm for flexible job-shop
scheduling problem. Journal of Intelligent Manufac-
turing, 29(3):603–615.
Nouri, H. E., Belkahla Driss, O., and Gh
´
edira, K. (2018).
Solving the flexible job shop problem by hybrid
metaheuristics-based multiagent model. Journal of In-
dustrial Engineering International, 14(1):1–14.
Nouri, H. E., Driss, O. B., and Gh
´
edira, K. (2015). Genetic
algorithm combined with tabu search in a holonic
multiagent model for flexible job shop scheduling
problem. In ICEIS (1), pages 573–584.
Wiers, V. C. (1997). A review of the applicability of or
and ai scheduling techniques in practice. Omega,
25(2):145–153.
Xie, J., Gao, L., Peng, K., Li, X., and Li, H. (2019). Review
on flexible job shop scheduling. IET Collaborative
Intelligent Manufacturing, 1(3):67–77.
Zadeh, P. M., Fakoor, M., and Mohagheghi, M. (2018). Bi-
level optimization of laminated composite structures
using particle swarm optimization algorithm. Journal
of Mechanical Science and Technology, 32(4):1643–
1652.
Zhang, S. and Wong, T. N. (2017). Flexible job-shop
scheduling/rescheduling in dynamic environment: a
hybrid mas/aco approach. International Journal of
Production Research, 55(11):3173–3196.
A Bi-Level Genetic Algorithm to Solve the Dynamic Flexible Job Shop Scheduling Problem
759
