
Sentiment-Based Engagement Strategies for Intuitive Human-Robot
Interaction
Thorsten Hempel
a
, Laslo Dinges
b
and Ayoub Al-Hamadi
c
Neuro-Information Technology, Faculty of Electrical Engineering and Information Technology,
Otto von Guericke University, Magdeburg, Germany
Keywords:
Human-Robot Interaction, Approaching Strategy, Sentiment Estimation, Emotion Detection, Anticipating
Human Behaviors, Approaching People, Productive Teaming.
Abstract:
Emotion expressions serve as important communicative signals and are crucial cues in intuitive interactions
between humans. Hence, it is essential to include these fundamentals in robotic behavior strategies when inter-
acting with humans to promote mutual understanding and to reduce misjudgements. We tackle this challenge
by detecting and using the emotional state and attention for a sentiment analysis of potential human inter-
action partners to select well-adjusted engagement strategies. This way, we pave the way for more intuitive
human-robot interactions, as the robot’s action conforms to the person’s mood and expectation. We propose
four different engagement strategies with implicit and explicit communication techniques that we implement
on a mobile robot platform for initial experiments.
1 INTRODUCTION
Once utopian, robots are increasingly moving from
industrial and laboratory settings to the real-world
in order to assist humans in everyday tasks. In this
process, human-robot interaction became a central
point of interest in robotic research that investigates
the manifold challenges in performing interactive and
collaborative tasks. As a general principle, the robot
needs to be acquired with the necessary skills to en-
able intuitive interactions with arbitrary human inter-
action partners, regardless of the corresponding task,
the human’s intention and communication behavior.
To this end, a fundamental objective is the anticipa-
tion of appropriate strategies to proactively approach
or evade people based on the situation-specific con-
text, such as the person’s mood, attitude (M
¨
uller-
Abdelrazeq et al., 2019; Elprama et al., 2016) and
ressentiments towards robots (Naneva et al., 2020;
Miller et al., 2021). First, it requires the determina-
tion of people’s interest in interacting at all (Satake
et al., 2009; Finke et al., 2005). Thereupon, the robot
has to find an appropriate strategy for either engaging
people to establish an interaction or to avoid a con-
frontation if desired. In order to reach these under-
a
https://orcid.org/0000-0002-3621-7194
b
https://orcid.org/0000-0003-0364-8067
c
https://orcid.org/0000-0002-3632-2402
lying decisions, the robot has to cope with a row of
sub-tasks: estimating people’s focus of attention (Dini
et al., 2017), predicting their mental state, and carry-
ing out a (dis-)engagement strategy (Avelino et al.,
2021).
Especially, the estimation of the interaction will-
ingness is a very challenging task, as this mental state
tends to provide only vague social signals. As an
alternative approach, many methods (Oertel et al.,
2020) go after the detection of engagement in order
to determine if a person already approached the robot
and waits for the robot’s reaction. This state expresses
itself more clearly, e.g., in voice commands (Foster
et al., 2017), gestures and proxemics, but it under-
mines the proactive approach and neglects situations
where the human partner is in need of help, but too
uncertain or not aware of the robot.
In this work, we close the gap between the lack of
proactive behavior and advanced mental state predic-
tions by introducing a sentiment-based engagement
strategy.
By combining the focus of attention and emotions,
we derive a sentiment analysis that allows us to select
fine-grained behavior patterns that exceed current bi-
nary engagement and disengagement strategies. We
implement our approach on a mobile robot platform
and execute our strategies using explicit and implicit
embodied communication. Our models are trained
on minimum sized networks in order to perform our
680
Hempel, T., Dinges, L. and Al-Hamadi, A.
Sentiment-Based Engagement Strategies for Intuitive Human-Robot Interaction.
DOI: 10.5220/0011772900003417
In Proceedings of the 18th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2023) - Volume 4: VISAPP, pages
680-686
ISBN: 978-989-758-634-7; ISSN: 2184-4321
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

method on mobile systems with limited computa-
tional resources.
2 RELATED WORK
In recent years, proxemic rules have been a popular
tool to draw conclusions about the different states of
human-robot interactions (Mumm and Mutlu, 2011)
and how spatial zones can be leverages to improve
them (Syrdal et al., 2007). (Repiso et al., 2018) pre-
dict appropriate encounter points to achieve a natu-
ral engagement with a group of people. Similarly,
(Satake et al., 2009) proactively approach detected
people to offer help. (Fischer et al., 2021) verbally
greet people and dynamically adapt the voice volume
based on the distance to the target person. Follow-
ing (Kendon, 1990), (Carvalho et al., 2021) apply the
Kendon’s greeting model to approach people while
tracking the human mental states of the interaction us-
ing multiple features, such as gaze, facial expressions,
and gestures. Yet, all of these methods neglect if the
human counterpart is actually interested and ready to
initiate an interaction. This is problematic, as in the
case of negative attitude, the robot’s interaction ef-
forts can be perceived as rude and annoying (Br
¨
ohl
et al., 2019). An initial attempt to address this was
presented by (Kato et al., 2015), who only approach
and offer help if they detect signs of attention towards
the robot. But this still doesn’t incorporate the actual
mental attitude of the human counterpart towards the
interaction itself.
The recent advances in the area of deep-learning
opened up new possibilities for the visual analysis of
humans, starting from general detection tasks to the
estimation of facial micro expressions. This allows
the aggregation of additional relevant information,
such as emotions (Chuah and Yu, 2021; Spezialetti
et al., 2020), to better understand the behavior and in-
tentions of the human interaction partner. To the best
of our knowledge, we are the first to leverage this ad-
vancement by predicting sentiment states based on vi-
sual emotion estimation to improve interaction strat-
egy for robots. We summarize our main contributions
as follows:
• We propose an image-based sentiment analysis to
gauge the current interaction preference of poten-
tial human interaction partners.
• We propose four different behavior strategies (En-
gage, Attract, Ignore, Avoid) that comprises a
number of different explicit and implicit commu-
nication modalities.
Yaw, Tilt Head
Rotate Base
Lifting Torso
Speech
Figure 1: The TIAGo robot platform with the key opera-
tions used in our method.
• We design ultra lightweight models to implement
our method and integrate it on a mobile robot plat-
form.
• We conduct initial experiments in laboratory set-
tings for an early evaluation.
3 METHOD
This section explains each step of our proposed
method for sentiment-based interaction behavior.
The sentiment analysis is based on two main fea-
tures: head pose and emotion estimation. The head
pose estimation is a leading indicator to gauge the cur-
rent visual focus of attention of the person. The emo-
tion estimation predicts the current emotional state of
the person. Together, it allows the assumption about
a person that a) is seeking for interaction, b) is in-
decisive about it or c) doesn’t want to engage with
the robot at all. Determining each sentiment state en-
ables to perform a dedicated robot behavior that cor-
responds with the expected reaction from the person
and, thus, improves an intuitive interaction. Figure 2
illustrates an overview of our proposed system. In the
following subsection, we will give details about each
component of the system and its interplay.
3.1 Robot Platform
We use the TIAGo robot from PAL Robotics, a mobile
service robot for indoor environments. It is equipped
with an RGB-D camera mounted inside its head, that
can be yawed and pitched to dynamically perceive the
environment. For grasping and moving objects, the
Sentiment-Based Engagement Strategies for Intuitive Human-Robot Interaction
681

robot has a manipulator arm with a 5 finger gripper.
The torso can be lifted to adjust the robot’s height, and
integrated speakers allow the output of voice com-
mands. These abilities allow the combination of ex-
plicit and implicit communication modalities that we
use in our method.
• Head Following: The robot’s head aims at and fol-
lows a moving person as an implicit signal of at-
tentiveness without actively approaching.
• Body Following: If a person exceeds the range of
the robot’s moving head, the entire robot base ro-
tates in order to keep track of the person. This
behavior communicates an attention commitment
and is therefore an even stronger signal as the
head following.
• Torso Lifting: Lifting the torso is a rather subtle
communication cue, as it is perceived similarly to
the social convention of standing up while greet
someone.
• Speech: Approaching people with speech rep-
resents an explicit communication strategy, that
stronger commits them to a reaction. Hence,
speech should be only used if the approached per-
son is highly expected to welcome an interaction.
3.2 Visual Attention
Typical indicators for gauging the human visual at-
tention are the gaze and, more coarsely, the head
pose. As the gaze depends on the eyes, which takes
only a small part in face images, it is prone to er-
rors. Therefore, we estimate the visual attention of
the surrounding persons based on a head pose predic-
tion algorithm. At first, we locate faces in the image
stream using an ultra light SSD face detector. Then,
the face crops are further processed by the 6DRep-
Net (Hempel et al., 2022), that uses a rotation repre-
sentation to directly regress yaw, pitch, and roll an-
gle of the faces. To assure real-time processing capa-
bilities, we replace the original 6DRepNet backbone
with the efficient MobileNetv3-Small (Howard et al.,
2019). The new head pose prediction model is able to
maintain 90% of its accuracy compared to the origi-
nal model, but is downsized to only one tenth of its
parameters count.
3.3 Emotion Estimation
In order to assess the attitude towards robots as well
as differentiated subjective states such as dislike or
willingness to cooperate, basic emotions can be used
as indicating features. Naturally, these are frequently
communicated by facial expressions. Hence, au-
tomatic facial expression recognition is an essen-
tial method to generate features for Human-Robot-
Collaboration and attention prediction.
Previous facial expression recognition methods
adhere to the established pipeline of face detection,
landmark extraction, and action unit (AU). Then,
emotions are classified using these AUs as feature
vectors (Wegrzyn et al., 2017; Vinkemeier et al.,
2018; Werner et al., 2017). However, end-to-end
learning on a single but more comprehensive, and bet-
ter generalizing database, often outperforms such tra-
ditional approaches. The AffectNet database (Molla-
hosseini et al., 2017) for example contains about 500k
in-the-wild samples for neutral and the basic emo-
tions happy, disgust, fear, surprise, anger, and sad-
ness. Furthermore, it is the only database, that also
includes ground truth of valence and arousal (VA),
which are, in contrast to the basic emotion classes,
continuous labels ∈ [−1, 1] which can be used for re-
gression tasks. VA is less intuitively interpretable by
humans, but it allows differentiation between facial
expressions of varying degrees. This is particularly
useful for capturing modest but long-term changes
in expressed emotion. In addition, a multitask net-
work (simultaneous training of classification and re-
gression) also improved the accuracy of the classifi-
cation. Furthermore, Valence summarizes essential
information about several emotions in one parameter
(negative, neutral, positive), which may facilitate the
development of heuristic behavior rules for some sce-
narios.
In our former work, we proposed a multitask
network based on YOLOv3 (Dinges et al., 2021).
For the current paper, we compared EfficientNetV2-
S, ResNet18, and MobileNetV3-Large. Despite the
poorer converging training loss, MobileNet, which is
optimized for limited hardware, achieved almost the
same accuracy on the test set as EfficientNet (devia-
tion < 1%). In addition, we used a weighted random
sampler to handle the imbalanced dataset and re-train
the network on the training and test set to generate
an application model with increased robustness to un-
seen data.
3.4 Sentiment Analysis and
Approaching Strategy
Detecting emotional expressions combined with the
visual focus of attention allows perceiving important
communicative signals. As in human-human interac-
tion, you may be more likely to greet a stranger who
smiles at you but avoid eye contact if that stranger
is scowling. We transfer these principles to deter-
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
682
Engage Attract
Avoid Ignore
Head Pose Estimation
Emotion estimation
Face Detection
Perception
Behavior Strategy
Sentiment Analysis
Emotional state with
focus of attention
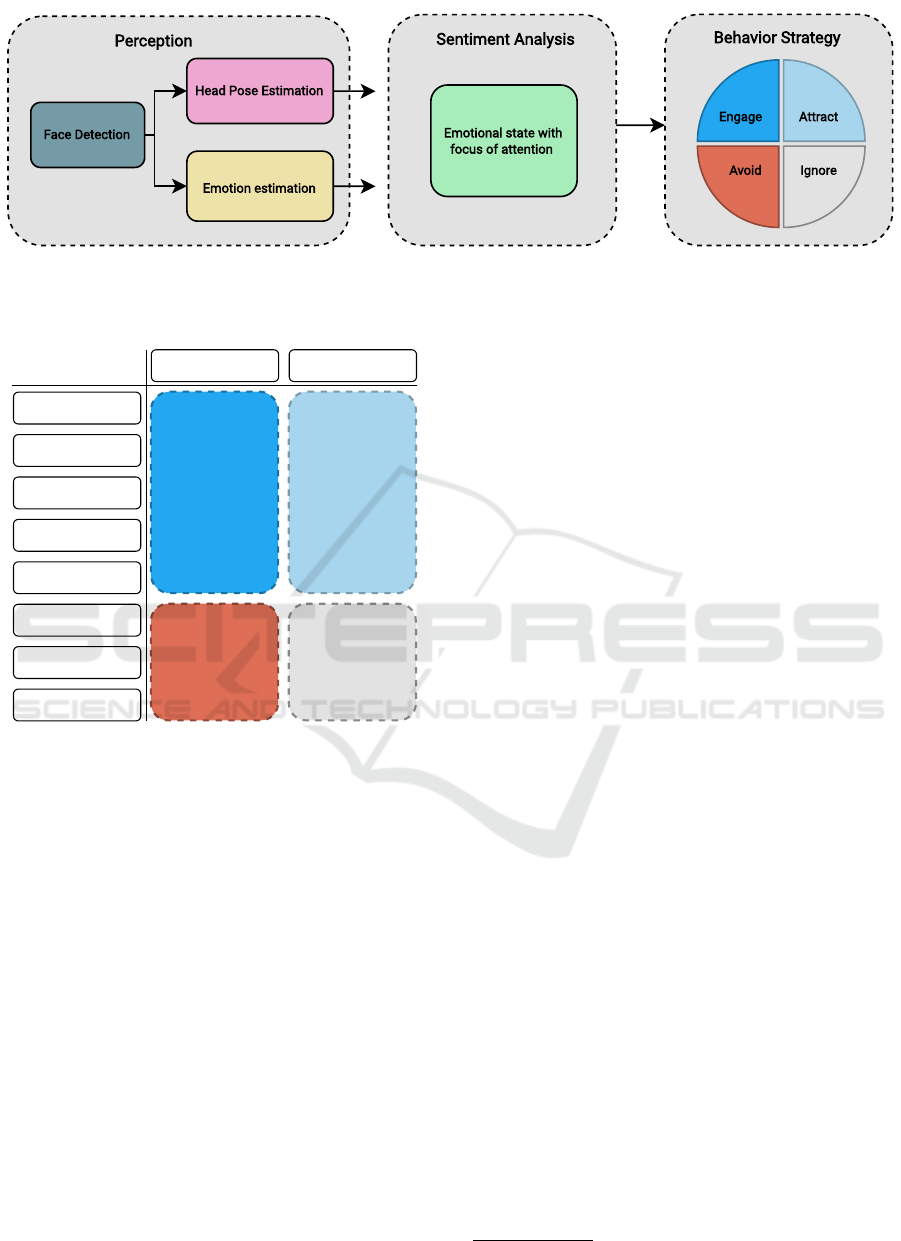
Figure 2: Method overview of our proposed system. Detected faces are used to estimate the head pose and the corresponding
emotions based on facial expressions. Both information is used to determine the emotional state with the corresponding visual
focus of the person’s attention that indicates the sentiment and allows a fine-tuned behavior strategy.
Happy
Uncertain
Surprise
Neutral
Sad
Fear
Disgust
Anger
Facing Averted
ENGAGE:
Lift torso, follow with
head and base, and
approach by speech
ATTRACT:
Lift torso and follow
with head
AVOID:
Look down and avoid
attraction
IGNORE:
Follow with head
Figure 3: Behavior strategies based on the emotional and
attentive state.
mine states of sentiment based on the combination
of the different emotions and visual attention. Is a
person showing visual signs of fear or anger, while
he is attentive towards the robot, it indicates a nega-
tive attitude towards the robot. In this case, a passive
robot behavior without hectic movements can help to
defuse the situation and to calm the person. If a per-
son is feared, but not attentive towards the robot, the
reason for the fear might not be the robot. Execut-
ing a more active robot behavior to show awareness
could be therefore a more suitable strategy. Hence,
our sentiment analysis allows us to compartmental-
ize the common hard binary engagement strategy into
soft behavior. Instead of choosing between engaging
and not engaging, we choose between four different
behaviors: Engage, Attract, Avoid, Ignore.
• Engage: Engaging will extend the torso of the
robot to signal the awareness of the person’s pres-
ence. Additionally, voice commands will greet
the people to actively initiate an interaction. This
strategy is called, when the attention is directed at
the robot with clear positive emotional attitude.
• Attract: Positive emotional attitude without atten-
tion towards the robot leads to more passive be-
havior. The goal is to signal the offer for inter-
action and help without actively committing to an
interaction. This is done by extending the torso
to show awareness, facing the person, but without
verbally greeting. This way, a non-verbal offer for
support (especially in case of uncertainty and sad-
ness) is subtly given, that can be easily accepted
or ignored.
• Avoid: The avoiding strategy is executed when
strong negative emotions (Fear, Disgust, Anger)
are facing the robot. In this case, the robot avoids
eye contact (keeps the face outside the camera
center) and takes a passive part. Especially in case
of fear, the goal is to increase the feeling of safe-
ness by avoiding unexpected motions.
• Ignore: If the negative emotions are not directed
at the robot, the robot mostly ignores the person,
only following it with its head to capture changes
in emotional or attention states.
Figure 3 shows all combinations of emotional and at-
tention states with corresponding behavior strategy.
4 IMPLEMENTATION
We used the ROS
1
middleware to implement our pro-
posed solution on our robot platform, as this also
offers a simplified integration into other ROS-based
robot platforms. Face detection, head pose and emo-
tion estimation are executed in separate nodes, that
forward the necessary information to perform the sen-
timent analysis and the action controls. While the lat-
ter is performed on the robot itself, the inference of
1
https://www.ros.org/
Sentiment-Based Engagement Strategies for Intuitive Human-Robot Interaction
683

Figure 4: Sentiment analysis in a laboratory setting. The
person is tracked using a face detector, followed by a head
pose and emotion estimation. As the person shows atten-
tiveness and happy, a positive sentiment towards the robot
is expected and a proactive initiation strategy selected.
the neural networks is outsourced to a separate note-
book that is mounted on the shoulder of the robot.
This ensures the complete mobility of the robot, while
exploiting additional computational resources. The
notebook has a Quadro RTX 4000 processing all
models in parallel with the following inference times:
• Face Detection: 6.7 ms
• Head Pose Estimation: 1.4 ms
• Emotion Estimation: 6.3 ms
The visual perception can be therefore performed in
real time and is able to continuously track people in
the surroundings.
5 EXPERIMENT
We conducted an initial experiment in a laboratory
setting to test our implemented method on the TIAGo
robot platform. The objective of the experiment was
to gain experience about the model’s performances in
real application scenarios. Figure 4 shows a snapshot
from one of our tests. The robot platform detects a
face in the environment and predicts head pose and
emotional state. The focus of attention is on the robot
(indicated by the green arrow) in conjunction with ex-
pressing happiness, so the robot initiates an interac-
tion by following the engage strategy.
While the models provide very robust predic-
tions, the implementation is currently entirely based
on single shot detections. Yet, over the duration of
face tracking, facial expressions change intermedi-
ately and short distractions make the head pose oc-
casionally oscillating. This leads to abrupt changes of
states within short time periods. Hence, to improve
the robustness of the sentiment analysis, conclusions
about the current state should incorporate the predic-
tions from multiple time frames.
6 CONCLUSION
In this paper, we present a sentiment-based method-
ology to improve the intuitiveness and reasoning in
human-robot interactions. Our method focuses on the
visual perception of mental states and the focus of at-
tention to derive a sentiment analysis for suitable in-
teraction initiation strategies. We take also into ac-
count the case where people are not interested in an
engagement at all, which has been mainly neglected
in the recent literature. To implement our method,
we trained lightweight perception models that we in-
tegrate on a mobile robot platform. Finally, we con-
ducted initial experiments using a mobile robot plat-
form to analyze the performance of our models and
the overall system.
In the future, we will extend our work by
embedding our sentiment analysis in a temporal-
probabilistic framework to improve the robustness in
real-world scenarios. Here, we will also incorpo-
rate the valence and arousal predictions to evaluate
the emotion’s intensity and transitions between emo-
tional states. Further enhancements offer the inclu-
sion of the robot’s mobility to actively engage and dis-
engage people or to add additional interaction modal-
ities, such as following people by command, getting
out of the way of passing people, or approaching a
place that offers a better overview of the surround-
ings.
Finally, we will conduct a study with test subjects
to evaluate our approach in terms of intuitiveness and
sympathy.
ACKNOWLEDGEMENTS
This work is funded and supported by the Fed-
eral Ministry of Education and Research of Ger-
many (BMBF) (AutoKoWAT-3DMAt under grant Nr.
13N16336) and German Research Foundation (DFG)
under grants Al 638/13-1, Al 638/14-1 and Al 638/15-
1.
REFERENCES
Avelino, J., Garcia-Marques, L., Ventura, R., and
Bernardino, A. (2021). Break the ice: a survey on
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
684

socially aware engagement for human–robot first en-
counters. International Journal of Social Robotics,
13:1851 – 1877.
Br
¨
ohl, C., Nelles, J., Brandl, C., Mertens, A., and Nitsch,
V. (2019). Human-robot collaboration acceptance
model: Development and comparison for germany,
japan, china and the usa. I. J. Social Robotics, 11:709–
726.
Carvalho, M., Avelino, J., Bernardino, A., Ventura, R.
M. M., and Moreno, P. (2021). Human-robot greet-
ing: tracking human greeting mental states and acting
accordingly. 2021 IEEE/RSJ International Confer-
ence on Intelligent Robots and Systems (IROS), pages
1935–1941.
Chuah, S. H.-W. and Yu, J. (2021). The future of ser-
vice: The power of emotion in human-robot interac-
tion. Journal of Retailing and Consumer Services,
61:102551.
Dinges, L., Al-Hamadi, A., Hempel, T., and Al Aghbari,
Z. (2021). Using facial action recognition to evaluate
user perception in aggravated hrc scenarios. In 2021
12th International Symposium on Image and Signal
Processing and Analysis (ISPA), pages 195–199.
Dini, A., Murko, C., Yahyanejad, S., Augsd
¨
orfer, U., Hof-
baur, M., and Paletta, L. (2017). Measurement and
prediction of situation awareness in human-robot in-
teraction based on a framework of probabilistic atten-
tion. In 2017 IEEE/RSJ International Conference on
Intelligent Robots and Systems (IROS), pages 4354–
4361.
Elprama, S., El Makrini, I., Vanderborght, B., and Jacobs,
A. (2016). Acceptance of collaborative robots by fac-
tory workers: a pilot study on the role of social cues
of anthropomorphic robots.
Finke, M., Koay, K. L., Dautenhahn, K., Nehaniv, C., Wal-
ters, M., and Saunders, J. (2005). Hey, i’m over here
- how can a robot attract people’s attention? In RO-
MAN 2005. IEEE International Workshop on Robot
and Human Interactive Communication, 2005., pages
7–12.
Fischer, K., Naik, L., Langedijk, R. M., Baumann, T.,
Jel
´
ınek, M., and Palinko, O. (2021). Initiating human-
robot interactions using incremental speech adapta-
tion. In Companion of the 2021 ACM/IEEE Interna-
tional Conference on Human-Robot Interaction, HRI
’21 Companion, page 421–425, New York, NY, USA.
Association for Computing Machinery.
Foster, M. E., Gaschler, A., and Giuliani, M. (2017). Au-
tomatically classifying user engagement for dynamic
multi-party human–robot interaction. International
Journal of Social Robotics, 9.
Hempel, T., Abdelrahman, A. A., and Al-Hamadi, A.
(2022). 6d rotation representation for unconstrained
head pose estimation. In 2022 IEEE International
Conference on Image Processing (ICIP), pages 2496–
2500.
Howard, A., Sandler, M., Chu, G., Chen, L.-C., Chen, B.,
Tan, M., Wang, W., Zhu, Y., Pang, R., Vasudevan, V.,
Le, Q. V., and Adam, H. (2019). Searching for mo-
bilenetv3. In Proceedings of the IEEE/CVF Interna-
tional Conference on Computer Vision (ICCV).
Kato, Y., Kanda, T., and Ishiguro, H. (2015). May i
help you? - design of human-like polite approach-
ing behavior-. In 2015 10th ACM/IEEE International
Conference on Human-Robot Interaction (HRI), pages
35–42.
Kendon, A. (1990). Conducting Interaction: Patterns of Be-
havior in Focused Encounters. Cambridge University
Press, Cambridge, U.K.
Miller, L., Kraus, J., Babel, F., and Baumann, M. (2021).
More than a feeling—interrelation of trust layers in
human-robot interaction and the role of user disposi-
tions and state anxiety. Frontiers in Psychology, 12.
Mollahosseini, A., Hasani, B., and Mahoor, M. H. (2017).
Affectnet: A database for facial expression, valence,
and arousal computing in the wild. IEEE Transactions
on Affective Computing, 10:18–31.
M
¨
uller-Abdelrazeq, S. L., Sch
¨
onefeld, K., Haberstroh, M.,
and Hees, F. (2019). Interacting with Collaborative
Robots—A Study on Attitudes and Acceptance in In-
dustrial Contexts, pages 101–117. Springer Interna-
tional Publishing, Cham.
Mumm, J. and Mutlu, B. (2011). Human-robot proxemics:
Physical and psychological distancing in human-robot
interaction. In 2011 6th ACM/IEEE International
Conference on Human-Robot Interaction (HRI), pages
331–338.
Naneva, S., Gou, M. S., Webb, T. L., and Prescott, T. J.
(2020). A systematic review of attitudes, anxiety, ac-
ceptance, and trust towards social robots. Interna-
tional Journal of Social Robotics, pages 1–23.
Oertel, C., Castellano, G., Chetouani, M., Nasir, J., Obaid,
M., Pelachaud, C., and Peters, C. (2020). Engagement
in human-agent interaction: An overview. Frontiers in
Robotics and AI, 7.
Repiso, E., Garrell, A., and Sanfeliu, A. (2018). Robot
approaching and engaging people in a human-robot
companion framework. In 2018 IEEE/RSJ Interna-
tional Conference on Intelligent Robots and Systems
(IROS), pages 8200–8205.
Satake, S., Kanda, T., Glas, D. F., Imai, M., Ishiguro, H.,
and Hagita, N. (2009). How to approach humans?-
strategies for social robots to initiate interaction. In
2009 4th ACM/IEEE International Conference on
Human-Robot Interaction (HRI), pages 109–116.
Spezialetti, M., Placidi, G., and Rossi, S. (2020). Emotion
recognition for human-robot interaction: Recent ad-
vances and future perspectives. Frontiers in Robotics
and AI, 7.
Syrdal, D. S., Lee Koay, K., Walters, M. L., and Dauten-
hahn, K. (2007). A personalized robot companion?
- the role of individual differences on spatial prefer-
ences in hri scenarios. In RO-MAN 2007 - The 16th
IEEE International Symposium on Robot and Human
Interactive Communication, pages 1143–1148.
Vinkemeier, D., Valstar, M. F., and Gratch, J. (2018). Pre-
dicting folds in poker using action unit detectors and
decision trees. In FG, pages 504–511.
Wegrzyn, M., Vogt, M., Kireclioglu, B., Schneider, J., and
Kissler, J. (2017). Mapping the emotional face. How
Sentiment-Based Engagement Strategies for Intuitive Human-Robot Interaction
685

individual face parts contribute to successful emotion
recognition. PLOS ONE, 12(5):e0177239.
Werner, P., Handrich, S., and Al-Hamadi, A. (2017). Fa-
cial action unit intensity estimation and feature rel-
evance visualization with random regression forests.
In 2017 Seventh International Conference on Affective
Computing and Intelligent Interaction (ACII), volume
2018-Janua, pages 401–406. IEEE.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
686
