
BGD: Generalization Using Large Step Sizes to Attract Flat Minima
Muhammad Ali
a
, Omar Alsuwaidi and Salman Khan
b
Department of Computer Vision, Mohamed bin Zayed University of Artificial Intelligence (MBZUAI), Abu Dhabi, U.A.E.
Keywords:
Generalization, Optimization Method, Deep Neural Network, Bouncing Gradient Descent, Heuristic Algo-
rithm, Large Step Sizes, Local Minima, Basin Flatness and Sharpness.
Abstract:
In the digital age of ever-increasing data sources, accessibility, and collection, the demand for generalizable
machine learning models that are effective at capitalizing on given limited training datasets is unprecedented
due to the labor-intensiveness and expensiveness of data collection. The deployed model must efficiently ex-
ploit patterns and regularities in the data to achieve desirable predictive performance on new, unseen datasets.
Naturally, due to the various sources of data pools within different domains from which data can be col-
lected, such as in Machine Learning, Natural Language Processing, and Computer Vision, selection bias will
evidently creep into the gathered data, resulting in distribution (domain) shifts. In practice, it is typical for
learned deep neural networks to yield sub-optimal generalization performance as a result of pursuing sharp
local minima when simply solving empirical risk minimization (ERM) on highly complex and non-convex
loss functions. Hence, this paper aims to tackle the generalization error by first introducing the notion of a
local minimum’s sharpness, which is an attribute that induces a model’s non-generalizability and can serve
as a simple guiding heuristic to theoretically distinguish satisfactory (flat) local minima from poor (sharp)
local minima. Secondly, motivated by the introduced concept of variance-stability ∼ exploration-exploitation
tradeoff, we propose a novel gradient-based adaptive optimization algorithm that is a variant of SGD, named
Bouncing Gradient Descent (BGD). BGD’s primary goal is to ameliorate SGD’s deficiency of getting trapped
in suboptimal minima by utilizing relatively large step sizes and ”unorthodox” approaches in the weight up-
dates in order to achieve better model generalization by attracting flatter local minima. We empirically validate
the proposed approach on several benchmark classification datasets, showing that it contributes to significant
and consistent improvements in model generalization performance and produces state-of-the-art results when
compared to the baseline approaches.
1 INTRODUCTION
Generalization refers to how well a trained generic pa-
rameterized candidate learner (usually a deep neural
network (DNN)) can categorize or predict data that
has not yet been seen. Deep learning (DL), which
utilizes the generalization power of deep neural net-
works, has recently caused paradigm shifts in vari-
ous academic and industrial fields. Therefore, one of
the primary goals of many studies pertaining to deep
learning has been to increase the generalization power
of deep neural networks through the implementation
of appropriate training techniques, and optimization
algorithms (Cha et al., 2021). One way to achieve this
goal is by finding a flat local minimum of a given
loss surface of training data (Lengyel et al., 2021),
a
https://orcid.org/0000-0001-9320-2282
b
https://orcid.org/0000-0002-9502-1749
(Lengyel et al., 2021), which indirectly induces mini-
mization of the generalization error, as shown explic-
itly in the following generalization risk upper bound
(Ben-David et al., 2010):
R
T
(h) ≤ R
emp
s
(h) + 2d(P
s
X
,P
t
X
) +
min
P
X
∈{P
s
X
,P
t
X
}
{E
x∼P
X
[|h
∗s
(x) −h
∗t
(x)|]}, (1)
where R
emp
s
(h) is the tractable source risk, R
T
(h)
is the target risk, and d(P
s
X
,P
t
X
) := min
A∈X
|P
s
X
[A] −
P
t
X
[A]| signifies how the source and target distribu-
tions are varied.
Flatness of a local minimum also induces mini-
mization of the generalization error implicitly in fol-
lowing bias-variance decomposition (James et al.,
Ali, M., Alsuwaidi, O. and Khan, S.
BGD: Generalization Using Large Step Sizes to Attract Flat Minima.
DOI: 10.5220/0011771700003417
In Proceedings of the 18th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2023) - Volume 5: VISAPP, pages
239-249
ISBN: 978-989-758-634-7; ISSN: 2184-4321
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
239

2013):
E
ˆy∼P
XY
( ˆy |x)
[( ˆy −y)
2
|x] =
(E[ ˆy|x ] −y
∗
)
2
| {z }
bias
+Var[ ˆy|x ]
| {z }
variance
+Var[y |x ]
| {z }
Bayes error
. (2)
The bias term can be correlated with the depth
of the loss landscape’s local minima, where attain-
ing a ”deeper” basin of a local minimum corre-
sponds to a lower bias value, lowering the gener-
alization error. Similarly, attracting a flat basin of
the loss landscape’s minimum corresponds to an in-
sensitive candidate learner, which results in dimin-
ishing the variance term, consequently reducing the
overall generalization error. Another popular way of
achieving model generalization is by utilizing vast
overparameterization in network models (Neyshabur
et al., ). It was shown by (Simsek et al., 2021) that
in vastly overparameterized networks, the number of
global minima subspaces dominates that of the criti-
cal subspaces, so that symmetry-induced saddles play
only a marginal role in the loss landscape. Hence,
the gradient trajectory will have an easier time con-
verging towards a more desirable (generalizable) lo-
cal minimum. Therefore, adequate optimization of
non-convex neural network loss landscapes can be
achieved via a combination of model attraction to-
wards flat local minima and model overparameteriza-
tion. Although they are gaining in popularity, stochas-
tic gradient descent (SGD) optimization algorithms
are frequently implemented as black-box optimizers
because it is challenging to propose concrete explana-
tions of the benefits and drawbacks of using these al-
gorithms in the different domains (Ruder, 2016) with-
out making several assumptions. However, SGD is
widely celebrated for its ability to converge to more
generalizable local minima as compared to other opti-
mization algorithms such as ADAM (Kingma and Ba,
2014) and RMSProp (Dauphin et al., 2015). SGD’s
ability to generalize has been attributed to its capa-
bility of escaping undesirable sharp local minima in
favor of more generalizable flat ones due to the inher-
ent stochasticity (noise) in its training process. There-
fore, the flatness of the loss surface has become an
appealing measure of generalizability for neural net-
works as a result of the intuitive connection to robust-
ness and predictor insensitivity, as well as the con-
vincing empirical evidence surrounding it. (Lengyel
et al., 2021) has provided quantifiable empirical evi-
dence that, under the cross-entropy loss, once a neu-
ral network reaches a non-trivial training error, the
flatness correlates (via Pearson Correlation Coeffi-
cient) well to the classification margins. Accordingly,
many researchers have proposed improved variants of
Vanilla GD that aim to generalize better and converge
faster, which are primarily driven by postulating nu-
merous assumptions, empirical experiments, and in-
tuitive, yet not necessarily rigorous, theoretical jus-
tifications. Our proposed method improved conver-
gence while maintaining accuracy. we present a new
gradient-based adaptive optimization process that we
call Bouncing Gradient Descent. This approach is a
version of SGD (BGD). The primary objective of
BGD is to improve upon SGD’s weakness of becom-
ing stuck in suboptimal minima. This will be accom-
plished by employing relatively large step sizes and
”unorthodox” approaches in the weight update pro-
cess. The end result we obtain is improved model gen-
eralisation achieved through the attraction of flatter
local minima. This helps in achieving stable conver-
gence and improved accuracies. We provide empirical
validation of the proposed method on many bench-
mark classification data-sets, demonstrating that it is
effective.
2 RELATED WORK
One key aspect that most of the variants of SGD at-
tempted to ameliorate was their ability to indirectly
or directly reduce the amount variance (noise) in the
approximated gradients of the weight updates while
simultaneously improving their stability (Netrapalli,
2019). The motivation behind reducing the gradient’s
variance was based on the perception that it would
lead to a better approximation of the true (full) gra-
dient and, as a result, it would allow the algorithm to
achieve faster and more stable convergence. This ul-
timately leads to better loss landscape and hence im-
proved accuracies. Furthermore, most proposed SGD
variants rely heavily on local information about the
loss surface through the exploitation of gradients and
Hessians to draw global conclusions. Some examples
of such algorithms that attempt to reduce the inherent
variance present in SGD include: SVRG (Johnson and
Zhang, 2013), SAG (Kone
ˇ
cn
`
y and Richt
´
arik, 2013),
SAGA (Defazio et al., 2014), and SARAH (Nguyen
et al., 2017).
While reducing the variance in the utilized gradi-
ents can lead to more stabilized weight updates dur-
ing training, potentially improving convergence time,
it does not guarantee that the converged set of weights
will be better (more generalizable) weight candidates
than otherwise. When diminishing the variance in the
deployed gradients to a large extent, we consequently
narrow down the region of uncertainty (confusion)
around where a local minimum can be located; there-
fore, it probabilistically leads to a reduction in the
number of explored regions in the loss (fitness) land-
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
240

scape that can contain a local minimum, thereby hin-
dering overall weight exploration for local minima.
The latter can be a primary cause of overfitting be-
cause a reduction in the probability of discovering lo-
cal minima could potentially force the optimizer to
search and converge within a limited region of the
weight (search) space, which could contain unfavor-
able narrow (sharp) local minima. The optimization
algorithm is therefore prevented from further explor-
ing other regions in the weight space that could have
corresponded to flatter more favorable local minima,
where the coinciding weights would have been more
generalizable and insensitive to more extensive input
data distributions, as proven by (Cha et al., 2021) and
(He et al., 2019) under mild assumptions. Further-
more, (Keskar et al., 2016) showed that small-batch
SGD consistently converges to flatter, more general-
izable minimizers as compared to large-batch SGD,
which tends to converge to sharp minimizers of the
training and testing functions. Additionally, they at-
tributed this reduction in the generalization gap when
performing small-batch SGD to the inherent noise in
the gradient estimation when performing the weight
updates.
Having said that, one can observe an apparent
tradeoff between the variance (noise) and stability of
the gradients. The gradient’s variance-stability trade-
off can be closely linked to the popular exploration-
exploitation tradeoff that occurs in reinforcement
learning systems, where exploration involves move-
ments such as discovery, variation, risk-taking, and
search, while exploitation involves actions such as re-
finement, efficiency, and selection. When searching
for local minima of the loss landscape in the weight
space, the amount of variance in the gradient is analo-
gous to exploration, while the gradient’s stability is
analogous to exploitation. That is because the high
variance in the gradients causes the weight updates
to be noisy, which coincides with oscillations in the
loss function, either due to bouncing off some local
minimum’s basin or skipping over sharp ones. In con-
trast, higher gradient stability implies an exploitative
approach to the local geometry of the loss landscape,
which can be achieved by considering more gradient
statistics (a larger batch size) or by relying on a his-
tory of past gradients, such as incorporating a momen-
tum factor or using a previous fixed mini-batch gradi-
ent direction as an anchor in order to stabilize future
SGD updates. The latter is implemented in algorithms
such as SVRG and SARAH in a double-loop fashion,
with the fixed mini-batch gradient being updated in
the outer loop
1
k
times the number of updates in the
inner loop, where k corresponds to the number of in-
dividual SGD updates in the inner loop.
One common and straightforward way that is used
to pseudo-reduce the amount of variance in the weight
updates is by altering the step size. Where to reduce
the noise in the gradients, an extremely small step size
is used, or a decaying factor on the gradient’s step
size is employed accordingly, such that the step size
shrinks continuously as the training proceeds in order
to reduce the amount of fluctuation in the weight up-
dates, thereby inducing stabilization (exploitation). In
a similar fashion, employing a large step size would
correspond to a pseudo-increase in the amount of vari-
ance in our weight updates, leading to further ex-
ploration in the weight space. However, picking the
right step size is a labor-intensive, non-trivial prob-
lem, as its appropriate value widely varies from model
to model and task to task and requires tedious manual
hyperparameter tuning depending on multiple factors
such as the data type, the dataset used, the selected
choice of optimization algorithm, and other factors.
Furthermore, there exists a surplus of research to
relate flatness with generalizability, such as the works
conducted by (Keskar et al., 2016), (He et al., 2019),
(Wen et al., 2018), and (Izmailov et al., 2018), where
they demonstrate the effectiveness of finding a flat-
ter local minima of the loss surface in improving the
model’s generalizability, and hence, one must seek
to formulate techniques that can either smoothen and
flatten the loss landscape on the training dataset, or
lead to convergence towards a flatter local minimum.
Accordingly, we can condense our primary goal
of achieving model generalization to having the opti-
mizer converge to the best possible generalizable lo-
cal minimum by finding and attracting the flattest one,
because seeking flat minima can achieve better gen-
eralizability by maximizing classification margins in
both in-domain and out-of-domain (Cha et al., 2021).
3 METHODOLOGY
Motivated by the variance-stability ∼ exploration-
exploitation tradeoff as well as the particular findings
of (Lengyel et al., 2021), (Cha et al., 2021), and
(Nar and Sastry, 2018), we propose a novel adaptive
variant of SGD, presented in Algorithm 1, named
Bouncing Gradient Descent (BGD), which aims
to ameliorate SGD’s deficiency of getting trapped
in suboptimal minima by using ”unorthodox” ap-
proaches in the weight updates to achieve better
model generalization by attracting flat local minima.
The authors of (Lengyel et al., 2021) established
a strong correlation between the flatness of a loss
surface’s basin and the wideness of the classification
margins associated with it, and (Cha et al., 2021)
BGD: Generalization Using Large Step Sizes to Attract Flat Minima
241

theoretically and empirically showed that attracting
flatter minima will result in smaller generalization
gaps and lower model overfitting. Furthermore, the
authors of (Nar and Sastry, 2018) demonstrated that
the step size of the GD algorithm (and its variants) in-
fluences the dynamics of the algorithm substantially.
More specifically, they showed a crucial relationship:
that the step size value restricts and limits the set of
possible local minima to which the algorithm can
converge. In addition, they demonstrated that if the
gradient descent algorithm is able to converge to a
solution while utilizing a large step size, then the
function that is estimated by the deep linear network
must have small singular values, and consequently,
the estimated function must have a small Lipschitz
constant. With the aforementioned statements in
mind, the BGD optimization algorithm is constructed
to leverage relatively large step sizes to its advantage,
allowing the optimizer to better explore the loss land-
scape in search of a flatter set of local minima. BGD
also makes use of overshooting oracles, which enable
the optimizer to bounce across the loss landscape’s
basins and avoid as many undesirable sharp local
minima as possible in order to eventually settle on a
sufficiently flat local minimum, which induces model
generalizability. Firstly, we introduce the notion of
a local minimum’s sharpness, which is an attribute
that induces a model’s non-generalizability and can
serve as a simple guiding heuristic to theoretically
distinguish good (flat) local minima from bad (sharp)
local minima. The concept of sharpness ψ : W
∗
→R
+
of a given local minima w
∗
in non-convex functions
L : W → R
+
is defined by the following formulation:
Let
w
c
:= argmax
∥
δ
∥
p
≤ρ
{L (w
∗
+ δ) −L (w
∗
)
| {z }
δ
∗
}+ w
∗
. (3)
Let
w
I
:= inf
λ∈(0,1)
{w
∗
+ λδ
∗
} (4)
such that: ∇
2
L(w
I
) is singular and
∥
∇L (w
I
)
∥
p
̸= 0.
Then:
ψ(w
∗
) :=
L (w
c
) −L (w
∗
)
∥
w
c
−w
∗
∥
p
+
∥
w
c
−w
I
∥
p
∥
w
c
−w
∗
∥
p
(5)
ψ(w
∗
) :=
1
∥
w
c
−w
∗
∥
p
L (w
c
) −L (w
∗
)
| {z }
>0
+
∥
w
c
−w
I
∥
p
(6)
ψ(w
∗
) :=
1
∥
δ
∗
∥
p
L (w
c
) −L (w
∗
) + ,
∥
w
c
−w
I
∥
p
(7)
where w
c
corresponds to the set of weights in the
weight space representing the pseudo-critical point
that is in proximity to a given local minimum w
∗
de-
fined by a ball of radius ρ, and w
I
refers to the set
of weights that represents the pseudo-inflection point
that is the closest to that given local minimum. Note
that there exists at least one inflection point between
any two critical points, as given by applying Rolle’s
Theorem to any differentiable function f
′
: where if
f
′
(a) = f
′
(b), then there exists x ∈ (a, b) such that
f
′′
(x) = 0, implying x is an inflection point. The first
term in Equation 5 resembles the slope of an em-
bedded one-dimensional manifold line, and it will al-
ways be positive, trivially because by construction:
L (w
c
) > L (w
∗
), ∀w
∗
∈ W
∗
. Moreover, the second
term serves as a metric that measures a local mini-
mum’s upwards concavity, where a smaller value for
the term indicates that the minimum’s basin holds its
upwards concavity for longer before starting to con-
cave downwards. Given the formulation above, the
goal of our optimization algorithm would be to cap-
ture the loss function’s local minimum with the small-
est degree of sharpness, which corresponds to finding
the smallest attainable value for Equation 7:
ψ
∗
= inf
w
∗
{ψ(w
∗
)}.
However, optimizing a non-convex function to at-
tain the best local minimum in terms of generaliz-
ability, represented by ψ
∗
can be infeasible. Thus, we
should consider a ”good enough” local minimum that
satisfies the following condition:
ψ(w
∗
) ≤ k ψ
∗
, k > 1. (8)
Looking at Equations 7 and 8, one can re-
mark that the common denominator term
∥
δ
∗
∥
p
:=
argmax
∥
δ
∥
p
≤ρ
{L (w
∗
+ δ) −L (w
∗
)} can serve as a signif-
icant, yet simple guiding heuristic in discriminating
flat minima from sharp ones, since the other terms are
more complicated to analyze and compute. Observing
that
∥
δ
∗
∥
p
is inversely proportional to a local mini-
mum’s sharpness:
ψ(w
∗
) ∝
1
∥
δ
∗
∥
p
,
we can hence use
∥
δ
∗
∥
p
as a rough measure to distin-
guish out and avoid undesirable local minima. There-
fore, we can postulate that any local minima with
∥
δ
∗
∥
p
satisfying the following criteria:
∥
δ
∗
∥
p
≤ γ, γ > 0, (9)
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
242
will be classified as a bad one. Thus, our objective
now becomes to avoid any local minima that sat-
isfy Equation 9. Since the magnitude of a weight up-
date in the direction of a local minimum is given by:
α
∥
∇
w
L (w)
∥
in GD algorithms, the probability of a
weight update at step t skipping over a bad local min-
imum, given by:
∥
δ
∗
∥
p
≤ γ can be modeled on the
order of the following:
Pr[α
∥
∇
w
t
L (w
t
)
∥
p
> γ +
∥
w
t
−w
∗
∥
p
]. (10)
From Equation 10, it is evident that increasing the
step size α will probabilistically increase the chances
of the optimizer skipping over the bad local minimum
while, at the same time, exploring the search space
further. Consequently, the integral aspect behind the
BGD algorithm is to use a substantial set of step sizes
α ≫ 0 in order to increase the odds of skipping over
as many sharp, ungeneralizable local minima as pos-
sible, as given in Equation 10.
Algorithm 1: Bouncing Gradient Descent (BGD).
Parameters: the step size vector α ≫ 0, the mini-
batch size m, the exponential decay rate for the sec-
ond moment estimate β ≥ 0.999, and the threshold
value τ ∈ (0.5,1)
Require: Stochastic objective function f : R
d
→ R
with parameters w
Require: Distance-measuring function dist : R
d
×
R
d
→ R
+2
<1
mapping gradients g
i
, g
j
to positive
scalars respectively, where large gradient magni-
tudes result in small scalar values and vice versa.
Initialize: w
0
(Initial parameter vector)
Initialize: υ
0
← 1 (2
nd
moment vector)
Initialize: t ← 0 (timestep)
while w
t
not converged do
g
t
= ∇
w
t
f
w
t
; x
i:i+m
υ
t+1
= υ
t
+ β ·
√
g
t
⊙g
t
oracle = w
t
−α ⊙g
t
g
orc
= ∇
orc
f
oracle; x
i:i+m
if
⟨
g
t
, g
orc
⟩
≤ 0 then ▷ Indicates the optimizer
has bounced off
d
1
, d
2
= dist (g
t
, g
orc
) ▷ d
1
+ d
2
= 1
if d
1
> τ then ▷ Implies the step size taken
is too big
α = α/υ
t+1
end if
w
t+1
= d
1
·w
t
+ d
2
·oracle
else
w
t+1
= oracle −α ⊙g
orc
end if
t = t +1
end while
Return: w
t+1
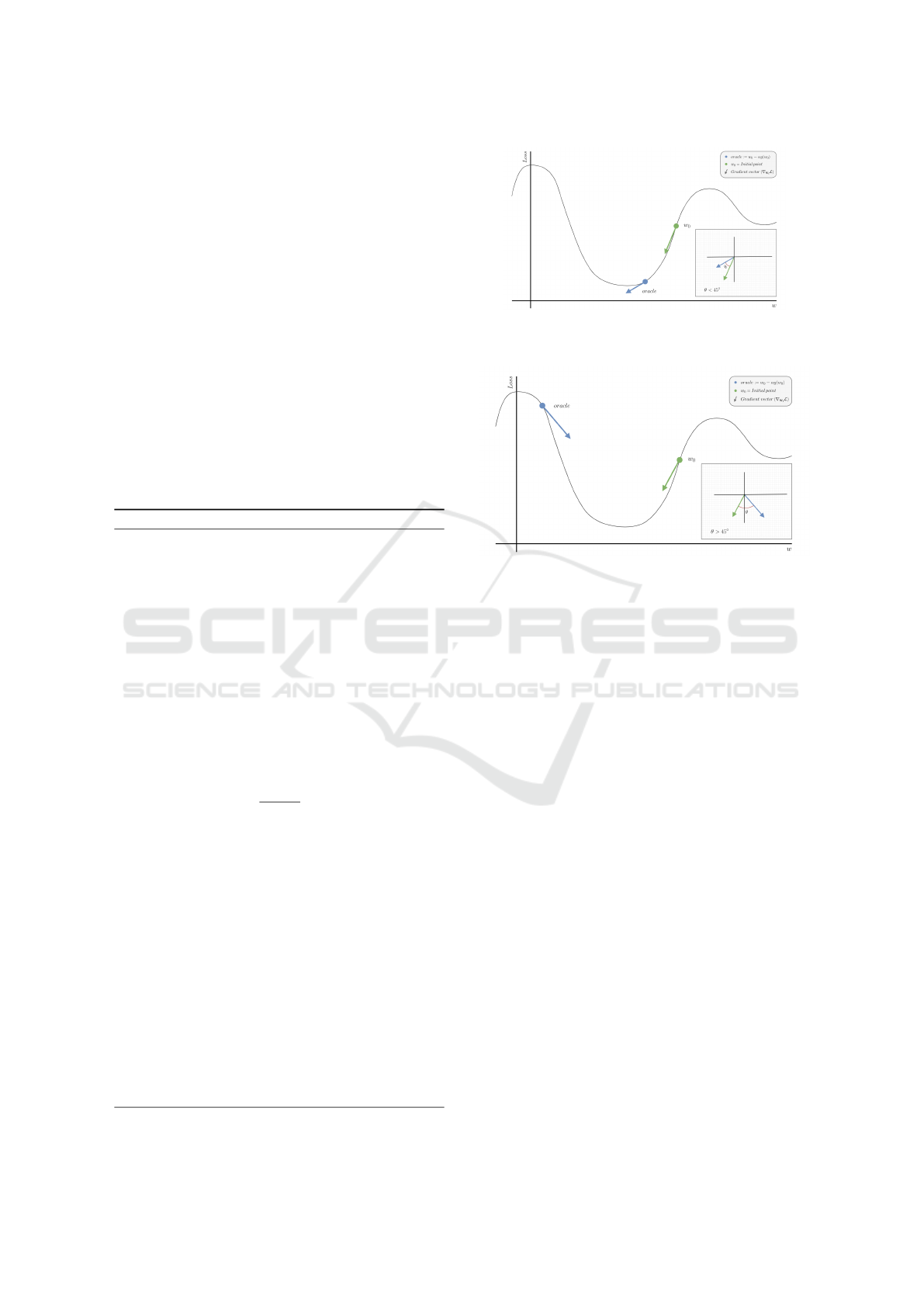
(a) The weight update results in both the previous weight w
0
and the oracle to be on the same side of the loss surface. In
such case, the first if statement would be evaluated as False.
(b) The weight update results in the oracle bouncing off
from the side where the previous weight w
0
was on the loss
surface. In such case, the first if statement would be evalu-
ated as True.
Figure 1: An elementary example to showcase the two pos-
sible cases of the first if statement in Algorithm 1.
As presented in Algorithm 1, BGD leverages rel-
atively significant step sizes in order to maximize its
regional search in the weight space for a generalizable
set of weights that coincide with a flatter local mini-
mum in the fitness landscape. The first if statement
is used to determine whether the optimizer’s initial
weight update: oracle = w
t
−α ⊙g
t
has caused the or-
acle to bounce off from one side of the loss surface to
another, indicated by the vector dot product
⟨
g
t
, g
orc
⟩
being non-positive. Additionally, we provide several
figures to help visualize the geometry of the dot prod-
uct if condition, as well as the possible trajectory dy-
namics that BGD can follow. Figure 1 presents a sim-
plified illustrative example, showcasing the two pos-
sible conditions of the first if statement.
Additionally, since BGD is an adaptive algorithm
(based on the second moment of gradients) that de-
ploys per-parameter step sizes, we explicitly capture
this notion in the step size α hyperparameter. Where
α is now a vector with relatively large step sizes cor-
responding to each weight, and the adaptivity of these
step sizes will become apparent when the second if
statement in Algorithm 1 is first triggered, specifically
when α = α/υ
t+1
, indicating an element-wise divi-
sion.
BGD: Generalization Using Large Step Sizes to Attract Flat Minima
243
Furthermore, the dist function is a vector-valued
distance-measuring (score) function that serves the
purpose of evaluating the relative quality of the two
given gradient vectors in order to yield two respective
distances summing up to one; resembling a weighted
sum of distances corresponding to each gradient vec-
tor.
The quality of a gradient degrades as its vector
norm increases and vice versa; here, the L2 norm was
used for the evaluation. A weight vector that yields a
smaller gradient norm will result in a comparatively
large distance value, and hence; the weight update
will lean closer towards that weight vector, allow-
ing the optimizer to quickly jump to attracting basins
given the large step sizes. The dist function can take
many forms, though the formulation used for the dist
function in the experiments was a simple and straight-
forward one, taking the following form:
dist (g
i
, g
j
) = [
g
j
∥
g
i
∥
+
g
j
+ ε
,
∥
g
i
∥
∥
g
i
∥
+
g
j
+ ε
],
(11)
where for numerical stability purposes, ε > 0 is a
small value added to the denominator. The thresh-
old value τ is an additional tunable hyperparameter
in BGD that determines when to adaptively shrink the
value of the step size vector α based on the second
moment of gradients υ in order to stabilize the future
weight updates. Execution of the second if statement
indicates that the overshooting oracle has landed on
a loss surface with a sharp (steep) curvature as com-
pared to its previous point w
t
, characterized by a large
gradient norm, and thus; the d
1
value corresponding to
w
t
will be relatively large. Hence, using a low thresh-
old value will be more suitable for highly non-convex
surfaces, as it will cause the second if statement to
trigger more often, consequently reducing the over-
all step size vector α. In practice, a threshold value
of τ ∈ [0.7, 0.9] was determined to work best empiri-
cally.
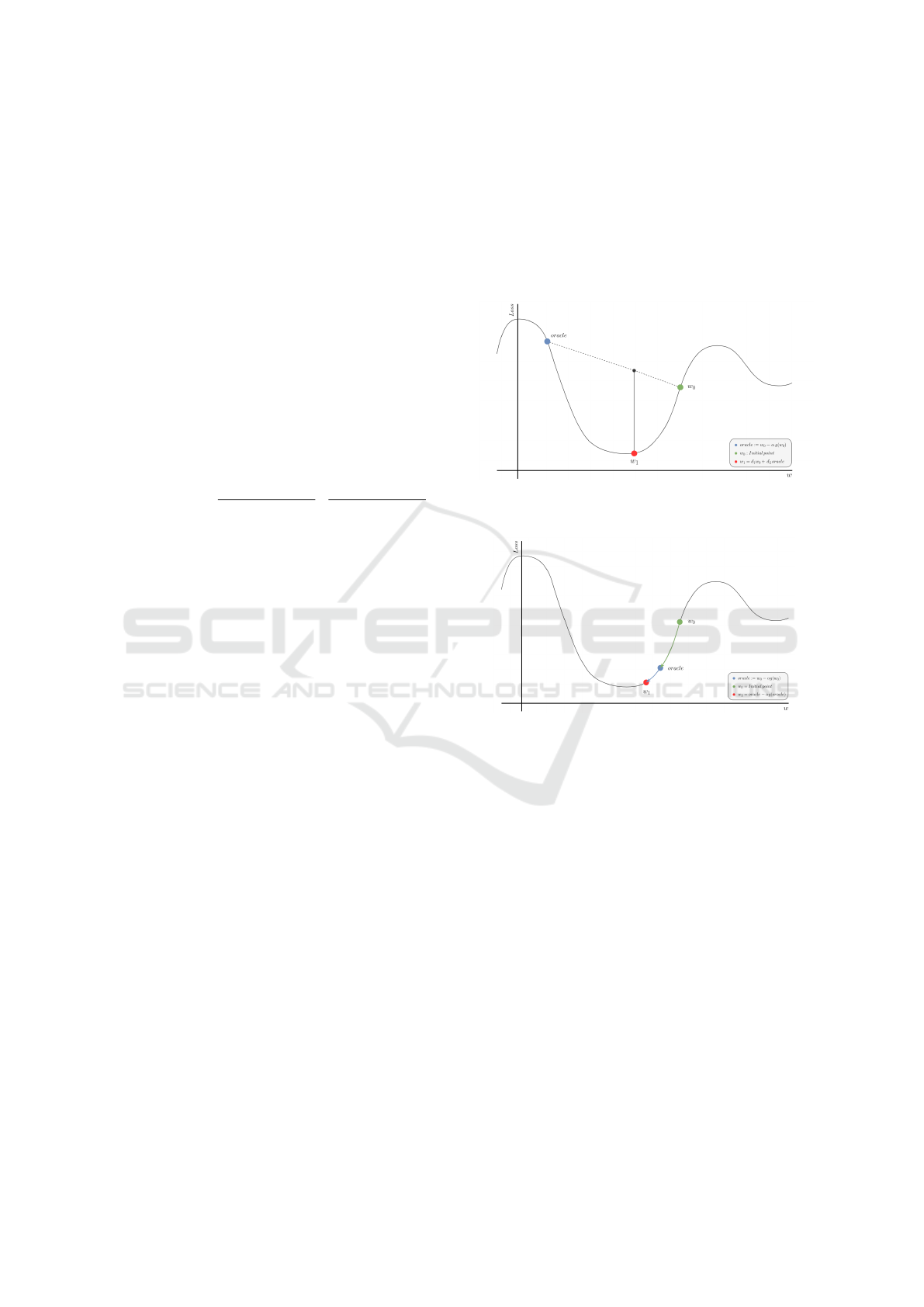
As apparent in Algorithm 1, BGD contains two
versions of the weight update. Where if the first if
statement was triggered, the first version of the form
w
t+1
= d
1
·w
t
+ d
2
·oracle will occur; implying that
the oracle has bounced off from the side of the loss
surface where the previous weight w
t
was at. The
updated weight w
t+1
in the first version will be a
weighted average of previous weight w
t
and the or-
acle, causing w
t+1
to land somewhere in between the
two valleys around the loss basin. However, if the first
if statement was not triggered, the second version of
the weight update will take place, which basically is
a gradient descent step from the oracle’s position to-
wards the local minimum. Both versions of the weight
update are illustrated in Figure 2.
Finally, since the step size for BGD does not need
to decay continuously to achieve stable convergence
as it does for SGD, allowing for a relatively large step
size to be utilized, which in turn leads to faster con-
vergence and the potential to converge to flatter lo-
cal minima due to the random exploration of the loss
landscape.
(a) Description of the first version of the weight update
which is applied when the first if statement is evaluated as
True.
(b) Description of the second version of the weight update
which is applied when the first if statement is evaluated as
False.
Figure 2: A simplified example that demonstrates the two
versions of the weight update presented in Algorithm 1.
4 EXPERIMENTATION AND
RESULTS
To begin, a comparison between GD and BGD is
made in terms of minimizing a simple β-smooth α-
strongly convex quadratic function f : R
2
→ R for
five iterations, in order to demonstrate the behavior
of the paths taken by each algorithm across differ-
ent step size values. As shown in the contour plots
of Figure 3, when a relatively proper step size is cho-
sen, GD weight updates follow a smooth trajectory to-
ward the minimum point of the function. Even though
this choice of step size does not fully capitalize on the
bouncing properties of BGD, it still manages to out-
perform GD significantly thanks to its advantageous
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
244
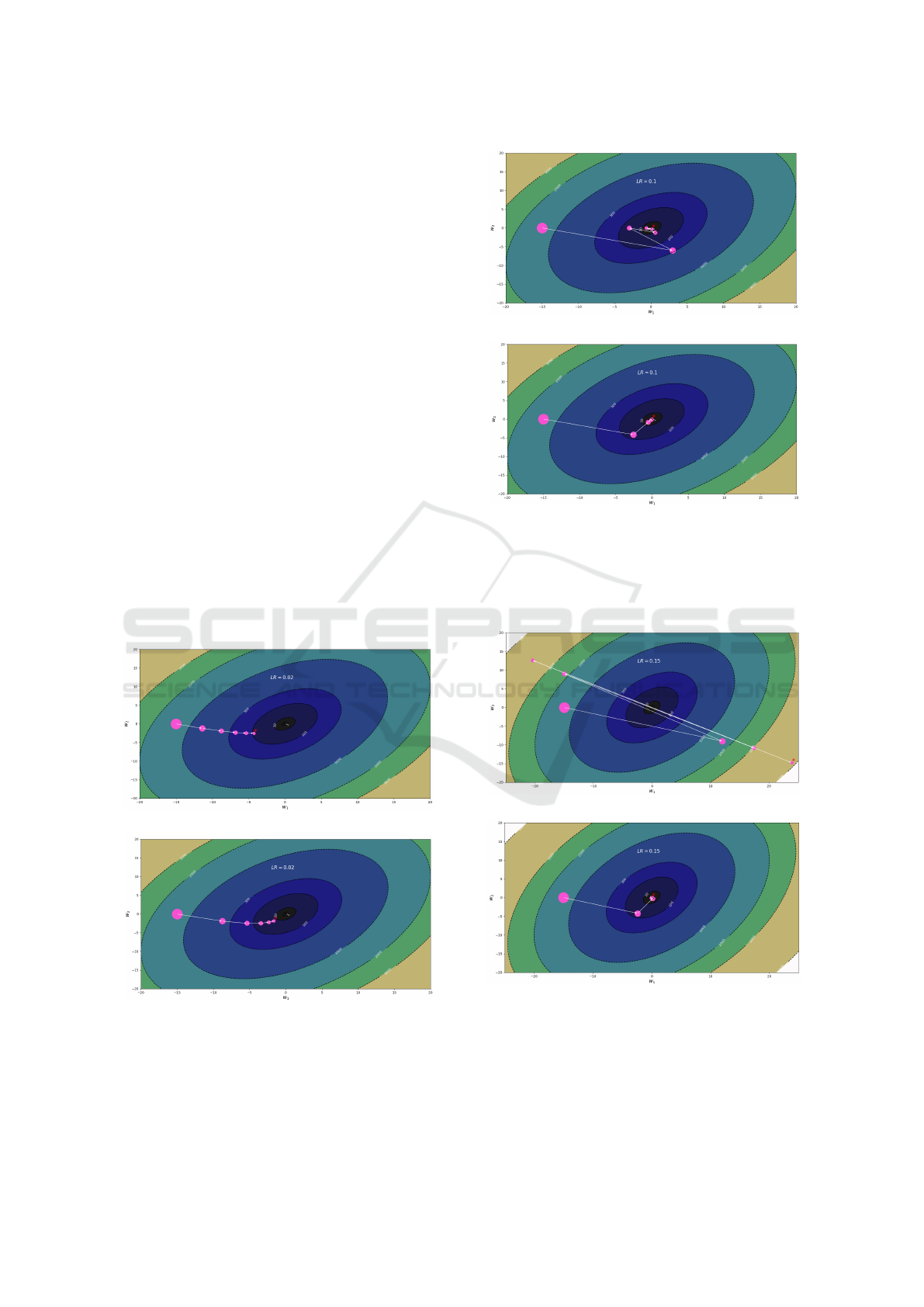
use of oracles. Figure 4 depicts the same comparison
made between the two algorithms, but this time, we
opted for a comparatively larger step size than the one
in Figure 3. As a result, we can see GD starting to
demonstrate oscillating behavior caused by bounces
around the basin of the function’s local minimum, in-
dicating that GD’s weight updates are overshooting
the minimum. On the other hand, BGD managed not
to overshoot the function’s minimum and bounce off
to the other side due to its utilization of the first ver-
sion of the weight update in BGD, resulting in faster
and more stable convergence.
Finally, Figure 5 shows the most unfavorable case
for GD, yet the most favorable case for BGD, where
a relatively large step size is deployed. Consequently,
GD started diverging away from the function’s
minimum and would require additional manual
intervention in order to stabilize its weight updates by
incorporating a step size decay per iteration. Again,
however, BGD faces no issues and is successfully
able to leverage the large step size to its advantage,
converging stably in much fewer steps than usual.
Furthermore, surprisingly, BGD is able to handle
much larger step sizes than those used in the figures.
However, when using such step sizes, GD starts to
diverge heavily and goes beyond the visible bounds
of the contour plots.
(a) Trajectory of the weight updates taken by GD.
(b) Trajectory of the weight updates taken by BGD.
Figure 3: A comparison between the trajectories taken
by GD versus BGD when minimizing the function:
f (w
1
, w
2
) = 6w
2
1
+ 4w
2
2
−4w
1
w
2
using a relatively small
step size of 0.02. The the final point is represented by the
asterisk symbol.
(a) Trajectory of the weight updates taken by GD.
(b) Trajectory of the weight updates taken by BGD.
Figure 4: A comparison between the trajectories taken by
GD and BGD when minimizing the function: f (w
1
, w
2
) =
6w
2
1
+ 4w
2
2
− 4w
1
w
2
using a relatively modest step size
(learning rate) of 0.1. The the final point is represented by
the asterisk symbol.
(a) Trajectory of the weight updates taken by GD.
(b) Trajectory of the weight updates taken by BGD.
Figure 5: A comparison between the trajectories taken by
GD and BGD when minimizing the function: f (w
1
, w
2
) =
6w
2
1
+4w
2
2
−4w
1
w
2
using a relatively large step size (learn-
ing rate) of 0.15. The the final point is represented by the
asterisk symbol.
BGD: Generalization Using Large Step Sizes to Attract Flat Minima
245
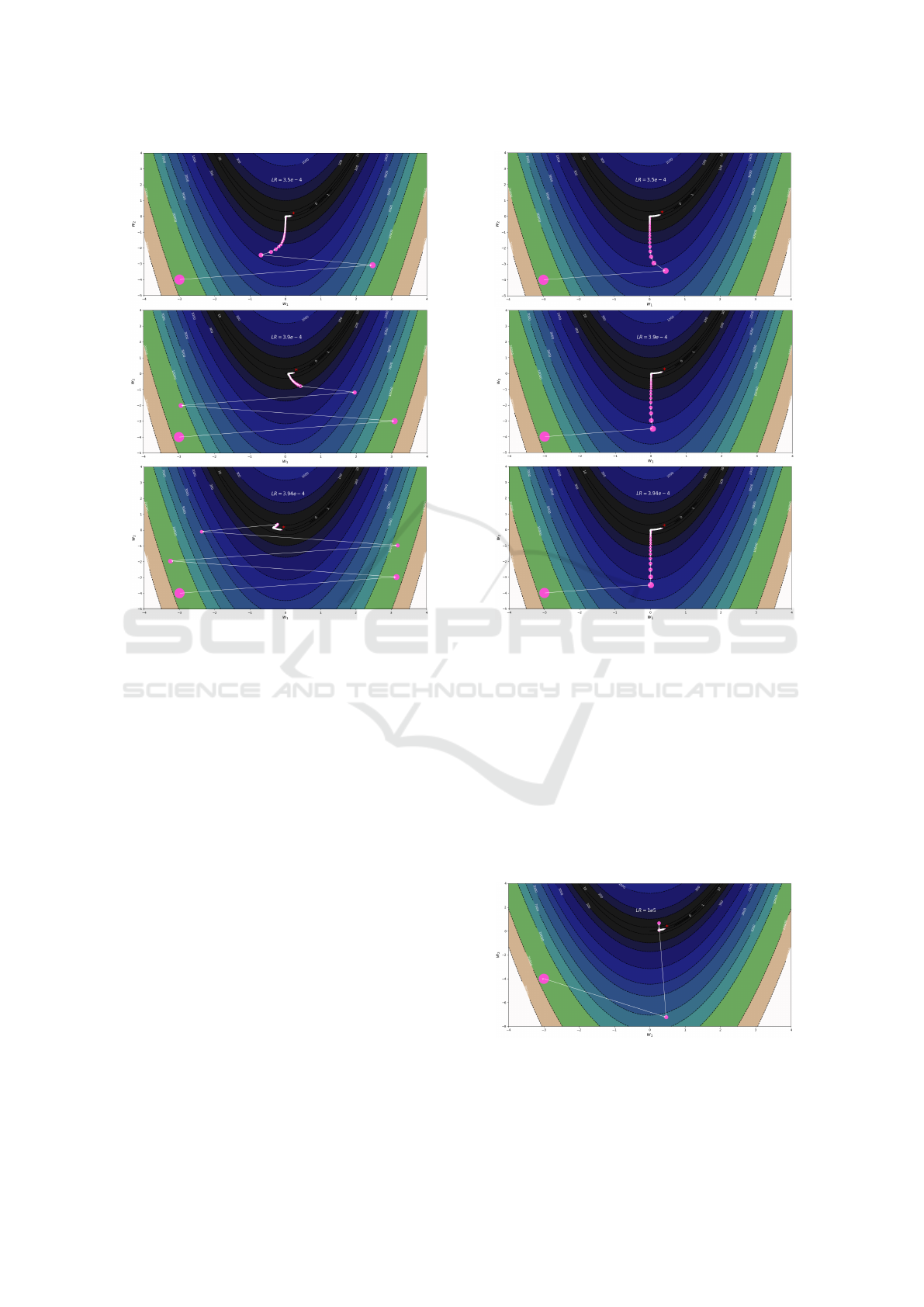
Figure 6: The trajectories taken by GD when minimizing
the Rosenbrock function: f (x, y) = (1 −x)
2
+100
y −x
2
2
across different values of the step size hyperparameter α,
where the final point is represented by the asterisk symbol.
In addition, a comparison of the trajectory dynam-
ics of both algorithms GD and BGD on minimizing
the Rosenbrock function f : R
2
→R for 325 iterations
is conducted. The Rosenbrock function is unimodal,
and its global minimum lies in a narrow, parabolic
valley, which is notoriously difficult to converge to
for gradient-based optimization algorithms. As shown
in Figure 6, GD’s convergence performance deterio-
rates as the step size increases due to the oscillations
around the valley of the function, failing to utilize the
increase in step size when approaching the minimum
of the Rosenbrock function. Moreover, GD’s conver-
gence performance is extremely sensitive to the step
size used, as relatively small adjustments made to the
step size result in extreme changes in the trajectories
and convergence of GD due to the non-convexity of
the Rosenbrock function. On the other hand, as illus-
trated in Figure 7, BGD’s convergence actually im-
proves as the step size increases, since BGD is able
to quickly land in the valley of the Rosenbrock func-
tion thanks to its first version of the weight update
(illustrated in Figure 2 (a)). Another important thing
to note is that GD started to diverge to infinity when
Figure 7: The trajectories taken by BGD when minimizing
the Rosenbrock function: f (x, y) = (1 −x)
2
+100
y −x
2
2
across different values of the step size hyperparameter α,
where the final point is represented by the asterisk symbol.
the step size was slightly altered to 3.95e−4, while
conversely, BGD demonstrated faster convergence to-
wards the minimum.
Furthermore, BGD can handle exceptionally large
step sizes, achieving remarkable performance even
when using a step size of α =1e5, resulting in a solu-
tion with a function value of 0.319 in 325 iterations as
demonstrated in Figure 8 This shows that even while
algorithm tested for the extreme cases gives stable
Figure 8: The trajectories taken by BGD when minimizing
the Rosenbrock function: f (x, y) = (1 −x)
2
+100
y −x
2
2
using an exaggerated value of 100000 for the step size hy-
perparameter α, where the final point is represented by the
asterisk symbol.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
246
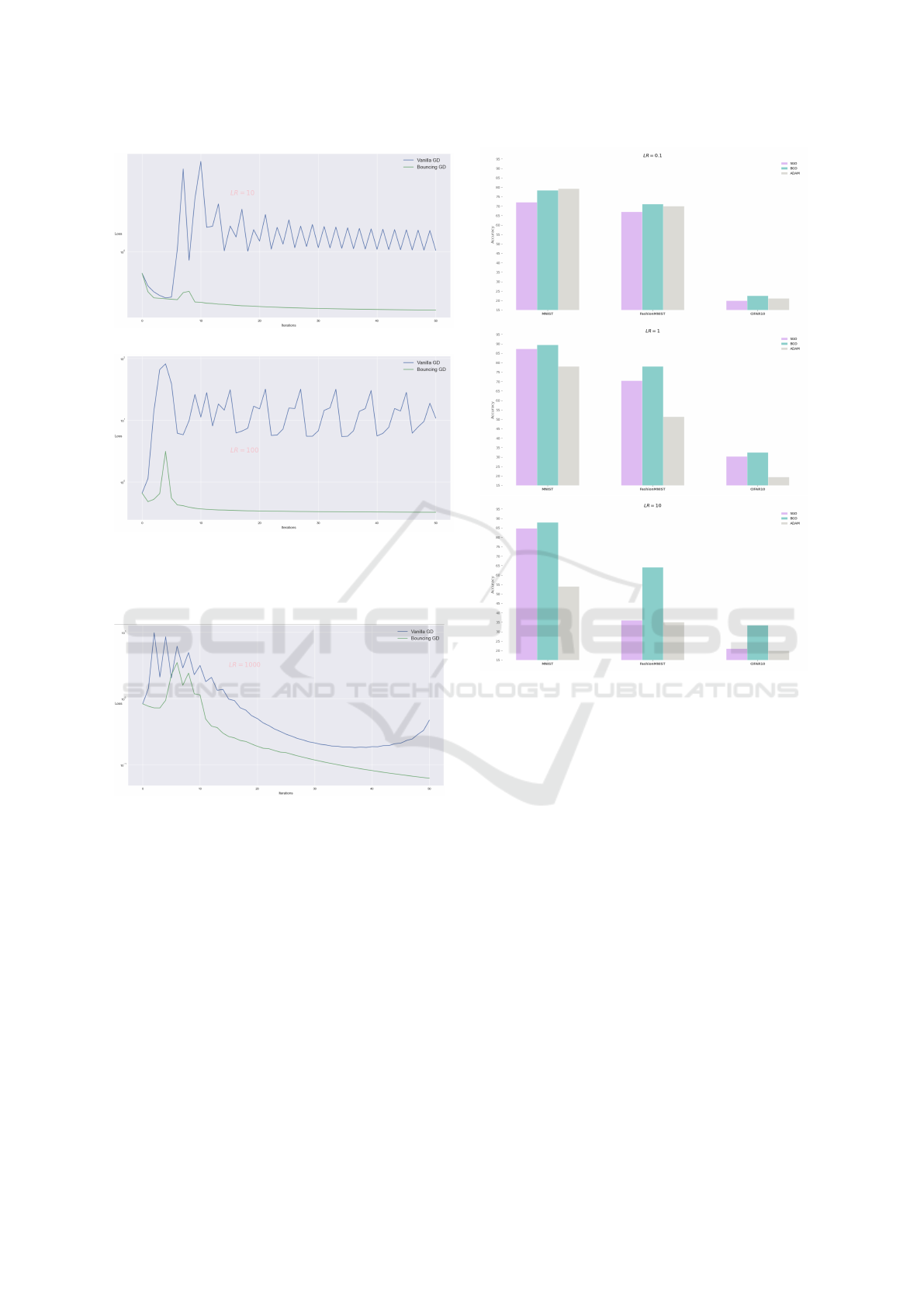
(a) Minimizing the logistic loss using a step size of 10.
(b) Minimizing the logistic loss using a step size of 100.
Figure 9: The log-scaled loss curves of each algorithm when
minimizing the logistic loss on the a1a dataset using two
different step sizes (learning rates).
Figure 10: The log-scaled loss curves of each algorithm
when minimizing the logistic loss on the news.20.binary
dataset using an exaggerated step size (learning rate) of
1000.
performance and it doesnot crash.
Next, we demonstrate yet another optimization
comparison between GD and BGD, though this time,
by observing how each algorithm minimizes the
logistic loss on two different binary classification
datasets taken from the LIBSVM library (Chang and
Lin, 2011). The first dataset is the simple a1a dataset,
which consists of 1,605 training examples, where
each example contains 123 input features. Figure 9 il-
lustrates the loss curves generated by training on each
algorithm. The second dataset is the more extensive
news.20.binary dataset, which contains 19,996 train-
ing examples and 1,355,191 input features per exam-
Figure 11: The classification accuracy of the different opti-
mization algorithms evaluated on multiple benchmark clas-
sification datasets when using a batch-size of 1000.
ple. Its loss curves are depicted in Figure 10; even
though both algorithms suffered from loss oscillations
initially, they eventually managed to find a relatively
smoother loss surface. However, GD started diverging
towards the end of the training phase, indicating that
the attracting basin of the loss function’s local min-
imum was relatively sharp; hence, GD bounced off
the minimum’s basin which resulted in a cascading
diverging effect, because unlike BGD, GD is unable
to handle large values of the step size α. Therefore
we cannot use very large learning rates with GD as it
will crash. While for the case of BGD we prove the
handling of even large learning rates with improved
convergence. That shows consistent performance of
our algorithm.
Finally, we conducted classification performance
comparisons between SGD (with and without mo-
mentum), BGD, and ADAM on popular benchmark
image classification datasets by minimizing the cate-
gorical cross-entropy loss of a three-layer non-linear
feedforward neural network, also known as a multi-
BGD: Generalization Using Large Step Sizes to Attract Flat Minima
247
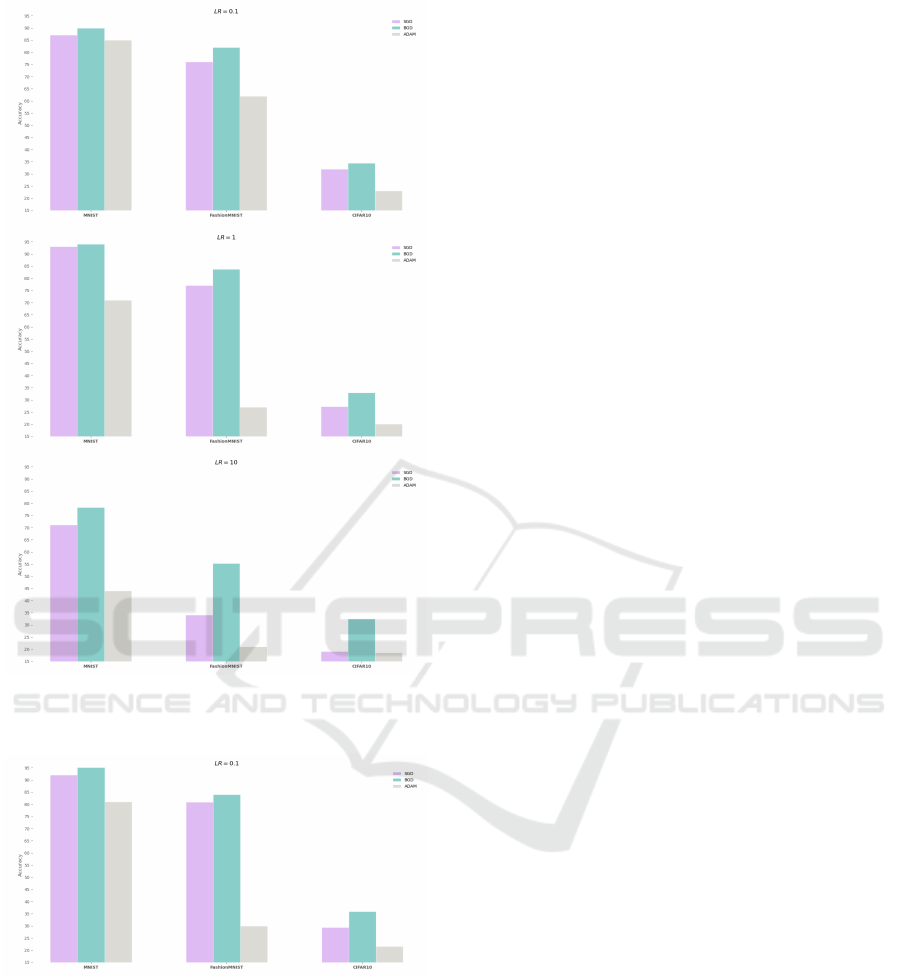
Figure 12: The classification accuracy of the different opti-
mization algorithms evaluated on multiple benchmark clas-
sification datasets when using a batch-size of 100.
Figure 13: The classification accuracy of the different opti-
mization algorithms evaluated on multiple benchmark clas-
sification datasets when using a batch-size of 10.
layer perceptron (MLP). For SGD, the best result be-
tween SGD versus SGD with momentum was cho-
sen for SGD’s performance evaluation. Each opti-
mizer was run using the same weight initialization,
same number of epochs, identical learning rates in
each run, and with the proper image normalization for
each dataset. Moreover, all the experiments were run
for five epochs while using the tanh non-linear acti-
vation for the hidden layers of the NN (other activa-
tion functions where also used such as ReLU and sig-
moid in the Appendix). Firstly, in Figure 11, a batch-
size of 1000 was used across different step sizes to
demonstrate each algorithms performance when uti-
lizing relatively stable gradients. Secondly, in Figure
12, a batch-size of 100 was used across different step
sizes, and finally, in Figure 13, a small batch-size of
10 was used with a relatively small learning rate to
demonstrate each algorithms performance when deal-
ing with comparatively high-variance (noisy) gradi-
ents. As illustrated in all the Figures, BGD consis-
tently outperforms both GD and ADAM under all set-
tings, and specifically, when a relatively large step
size is used, confirming BGD’s superiority in utilizing
large step sizes. This algorithm shows stable perfor-
mance in all the different settings shown and proved
the usefulness of this algorithm. With better and opti-
mized learning rates this algorithm can be utilized for
downstream tasks with improved convegence.
5 CONCLUSION
The primary goal of this paper was to tackle the sig-
nificantly practical problem of being able to train
a generic model that can generalize efficiently by
learning predictive knowledge from a limited train-
ing dataset, given that the gathered data is not a sta-
tistically significant representation of the population
data due to selection bias. We introduced the BGD al-
gorithm, a novel and robust gradient-based optimiza-
tion algorithm aimed at capturing flatter local min-
ima as compared to SGD and its variants for non-
convex objective functions. The BGD algorithm is
constructed in such a way as to leverage relatively
large step sizes to its advantage since the step size re-
stricts the set of local minima that the algorithm can
converge to, allowing the optimizer to better explore
the loss landscape in search of a flatter set of local
minima. BGD also makes use of overshooting ora-
cles, which enable the optimizer to bounce across the
loss landscape’s basins and avoid as many undesir-
able sharp local minima as possible in order to eventu-
ally settle on a sufficiently flat local minimum, which
induces model generalizability. This paper also aims
to push for intuitive, unorthodox approaches that uti-
lize large step sizes in weight updates to balance the
variance-stability ∼ exploration-exploitation tradeoff.
Currently, most proposed SGD variants rely heavily
on exploiting the local information about the loss sur-
face to stabilize training and convergence rather than
utilizing the inherent variance advantageously to fur-
ther explore the loss landscape, exposing the opti-
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
248

mizer to a broader set of minima in the hopes of at-
tracting a flatter local minimum. The experimenta-
tions conducted empirically validate the superiority
and consistency of the proposed algorithm over the
baseline methods in improving classification accuracy
and achieving model generalization. They also reveal
the robustness of BGD and demonstrate that it is well-
suited to a wide range of non-convex optimization
problems in machine learning.
REFERENCES
Ben-David, S., Blitzer, J., Crammer, K., Kulesza, A.,
Pereira, F., and Vaughan, J. W. (2010). A theory of
learning from different domains. Machine learning,
79(1):151–175.
Cha, J., Chun, S., Lee, K., Cho, H.-C., Park, S., Lee, Y.,
and Park, S. (2021). Swad: Domain generalization by
seeking flat minima. Advances in Neural Information
Processing Systems, 34:22405–22418.
Chang, C.-C. and Lin, C.-J. (2011). LIBSVM: A library for
support vector machines. ACM Transactions on Intel-
ligent Systems and Technology, 2:27:1–27:27. Soft-
ware available at http://www.csie.ntu.edu.tw/
∼
cjlin/
libsvm.
Dauphin, Y. N., de Vries, H., Chung, J., and Ben-
gio, Y. (2015). Rmsprop and equilibrated adaptive
learning rates for non-convex optimization. CoRR,
abs/1502.04390.
Defazio, A., Bach, F., and Lacoste-Julien, S. (2014). Saga:
A fast incremental gradient method with support for
non-strongly convex composite objectives. Advances
in neural information processing systems, 27.
He, H., Huang, G., and Yuan, Y. (2019). Asymmetric val-
leys: Beyond sharp and flat local minima. Advances
in neural information processing systems, 32.
Izmailov, P., Podoprikhin, D., Garipov, T., Vetrov, D., and
Wilson, A. G. (2018). Averaging weights leads to
wider optima and better generalization. arXiv preprint
arXiv:1803.05407.
James, G., Witten, D., Hastie, T., and Tibshirani, R. (2013).
An introduction to statistical learning, volume 112.
Springer.
Johnson, R. and Zhang, T. (2013). Accelerating stochastic
gradient descent using predictive variance reduction.
Advances in neural information processing systems,
26.
Keskar, N. S., Mudigere, D., Nocedal, J., Smelyanskiy, M.,
and Tang, P. T. P. (2016). On large-batch training for
deep learning: Generalization gap and sharp minima.
arXiv preprint arXiv:1609.04836.
Kingma, D. P. and Ba, J. (2014). Adam: A method
for stochastic optimization. arXiv preprint
arXiv:1412.6980.
Kone
ˇ
cn
`
y, J. and Richt
´
arik, P. (2013). Semi-stochastic gradi-
ent descent methods. arXiv preprint arXiv:1312.1666.
Lengyel, D., Jennings, N., Parpas, P., and Kantas, N. (2021).
On flat minima, large margins and generalizability.
Nar, K. and Sastry, S. (2018). Step size matters in deep
learning. Advances in Neural Information Processing
Systems, 31.
Netrapalli, P. (2019). Stochastic gradient descent and its
variants in machine learning. Journal of the Indian
Institute of Science, 99(2):201–213.
Neyshabur, B., Li, Z., Bhojanapalli, S., LeCun, Y., and Sre-
bro, N. The 1359 role of over-parametrization in gen-
eralization of neural networks. In International, vol-
ume 1360.
Nguyen, L. M., Liu, J., Scheinberg, K., and Tak
´
a
ˇ
c, M.
(2017). Sarah: A novel method for machine learning
problems using stochastic recursive gradient. In In-
ternational Conference on Machine Learning, pages
2613–2621. PMLR.
Ruder, S. (2016). An overview of gradient de-
scent optimization algorithms. arXiv preprint
arXiv:1609.04747.
Simsek, B., Ged, F., Jacot, A., Spadaro, F., Hongler, C.,
Gerstner, W., and Brea, J. (2021). Geometry of the
loss landscape in overparameterized neural networks:
Symmetries and invariances. In International Confer-
ence on Machine Learning, pages 9722–9732. PMLR.
Wen, W., Wang, Y., Yan, F., Xu, C., Wu, C., Chen, Y., and
Li, H. (2018). Smoothout: Smoothing out sharp min-
ima to improve generalization in deep learning. arXiv
preprint arXiv:1805.07898.
BGD: Generalization Using Large Step Sizes to Attract Flat Minima
249
