
Modelling Spatial Connectivity of Forest Harvest Areas: Exact and
Heuristic Approaches
Pete Bettinger
a
Warnell School of Forestry and Natural Resources, University of Georgia, 180 E. Green Street, Athens, Georgia, U.S.A.
Keywords: Connectivity, Spatial Analysis, Land Management, Forestry, Natural Resource Management.
Abstract: A forest management planning process can involve the development of a tactical plan that illustrates for a
land manager where to go and what to do within a specific period of time, acknowledging and satisfying all
recognized management constraints. More often these days, forest management constraints address the size,
timing, and placement of management activities. The optimization methods used to mathematically develop
a forest plan, and to integrate spatial constraints into planning efforts are often referred to as exact and heuristic
approaches. This paper describes how one might model spatial connectivity of forest harvest areas as
constraints under both approaches, using two different representations of connectivity, the unit restriction
model and the area restriction model. The heuristic approach to the latter has until now only been described
using scientific notation. Here, we provide guidance for the programming logic.
1 INTRODUCTION
Forest management is an important aspect of modern
society. Nations around the world act in various ways
to address the use of these renewable resources, to
balance the demand for wood and paper products with
the demand for other ecosystem services such as the
development and maintenance of recreational spaces
and wildlife habitat, and the provisioning of water and
sequestered carbon. Knowledge of the potential
location of future forest management activities can
help forest managers better account for spatial
management restrictions and wildlife habitat
concerns, and thus allow appropriate decisions to be
made. In some cases the rules for the management of
forests are embedded in laws and regulations (e.g.,
Maine Forest Service, 2017). In the absence of these,
forest management may be influenced by the desires
of certification programs (e.g., Forest Stewardship
Council-US, 2019) or simply by the desires of the
forest landowner.
Over the last three decades, the use of spatial
dependencies for analysing appropriate actions has
been increasingly suggested in the functional
relationships that connect proposed management
activities to economic, ecologic, or social outcomes.
a
https://orcid.org/0000-0002-5454-3970
In the field of forestry, the use of a geographic
concept, adjacency, has become an important method
for assessing spatial dependencies, and the outcomes
of these assessments subsequently are used to control
(constrain) the assignment of management activities
to forest areas.
There are many reasons why a specific forest
landowner would want to develop a forest plan that
addresses spatial issues such as adjacency of
management activities, from concern over the
cumulative effects of the management of their lands
to compliance with laws and regulations (Bettinger
and Sessions, 2003). Landowners often develop a
forest plan to guide the implementation of
management activities by forest managers. The closer
a plan models the real world system in which the
forest managers operate, the more likely the outcomes
of forest management can trusted. However, forest
planning problems with spatial connectivity
constraints can be difficult to mathematically model.
Often the number of spatial relationships that are
needed to represent connectivity of management
activities or the impact of management on wildlife
habitat components increase exponentially as
management unit size decreases and the scope of
local analysis rules increase. Some examples include
the examination of wildlife habitat conditions within
136
Bettinger, P.
Modelling Spatial Connectivity of Forest Harvest Areas: Exact and Heuristic Approaches.
DOI: 10.5220/0011761600003473
In Proceedings of the 9th International Conference on Geographical Information Systems Theory, Applications and Management (GISTAM 2023), pages 136-143
ISBN: 978-989-758-649-1; ISSN: 2184-500X
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

a certain distance of a proposed timber harvest, and
the impact of that proposed harvest on minimum
habitat suitability constraints (Bettinger and Boston,
2008), and the evaluation of the average size of a
forest openings caused by proposed timber harvest
activities, and the impact of that proposed harvest on
constraints that limit maximum average opening sizes
(SFI USA, 2022). The mathematical approaches that
might be used to represent important spatial
relationships within a forest planning or optimization
context may overwhelm both the planner and the data
development processes employed.
This paper describes the common ways in which
adjacency of planned management activities is
modeled in quantitative processes that lead to the
development of a formal forest plan. The methods are
aimed at the integration of these ideas as constraints
with exact approaches to optimization of a forest plan
through mixed integer programming, and with
heuristic approaches to combinatorial optimization
through processes such as simulated annealing,
threshold accepting, or tabu search.
2 METHODS
The concepts described here refer to the development
of a tactical forest plan (where to go, and what to do
during specific periods of time). A mathematical
recognition and acknowledgement that two proposed
forest management activities are adjacent, in time and
space, can be used as a constraint that limits one of
them from being implemented through the tactical
forest plan. The feasibility of forest plans, which
guide the activities implemented by forest managers,
should be sound, providing forest managers an
opportunity to avoid mistakenly transforming the
condition of a landscape to a state that may be not
only undesirable, but also difficult to remedy in a
short amount of time.
Management units (i.e., stands, polygons) are
defined in modern times through the development of
a geographic information system (GIS) database.
These are contiguous areas of land that will be
managed in the same way through time. They often
include resources (e.g., trees) that have similarities or
are managed similarly. One example would be an area
of planted pine trees, where all of the trees are the
same species and age, and thus managed as an even-
aged system. Another example may be an area
containing a collection of heterogeneous tree species
and tree ages that are managed together as an uneven-
aged system. Adjacency refers to the proximity of
each management unit. In forest management, the
most common type of adjacency relationship between
two management units is that they share a side (or in
GIS, a line). However, an adjacency relationship may
suggest that two management units (a) only share a
point (vertex) in geographical space, of (b) share not
even a single vertex but have polygon vertices that are
within some assumed distance (e.g., less than 100 m
apart in geographical space).
Described below are methods for addressing
constraints of an optimization process. Constraints
control the amount, timing, and placement of
management activities when one seeks to minimize or
maximize some objective function (e.g., maximize
revenue). Two types of adjacency relationships are
commonly recognized in forest management
planning to control the timing and placement of final
forest harvests (clearcuts): the unit restriction model
and the area restriction model (Murray 1999).
2.1 Unit Restriction Adjacency
The concept of unit restriction adjacency in forest
and natural resource management is often used within
mathematical processes related to the development of
a tactical forest plan (where to go, and what to do
during specific periods of time). Unit restriction
adjacency constraints would prevent the assignment
of similar activities to two adjacent management units
during a specific period of time. For example, if the
final felling of trees in two management units were
under consideration, a unit restriction adjacency
constraint would prevent the assignment of the
fellings to occur during the same period of time. The
period of time is also referred to the green-up period,
which denotes the amount of time that the regenerated
forest in one management unit (the one whose trees
have been previously harvested) to grow to a desired
height (hence green up). In the northwestern United
States, the green-up period is often assumed to be 5
years on private lands, yet it can be much longer on
public lands. The length of the green-up period is
often defined by law or by policy.
2.1.1 Exact Approach
When employing unit restriction adjacency of forest
management activities and using an exact approach
suitable for mixed integer programming optimization
techniques (branch and bound, cutting plane, etc.),
one would develop pairwise constraints that limit the
ability of the process from selecting for management
two adjacent neighbours during the same time period
or green-up period. For example, to prevent the trees
in both management unit 1 and management unit 2,
Modelling Spatial Connectivity of Forest Harvest Areas: Exact and Heuristic Approaches
137

which are physically adjacent, from being harvested
during the same period of time (e.g., time period 1) a
constraint would be developed:
MU1P1 + MU2P1 <= 1
(1)
Here, the decision variable MU1P1 represents the
potential harvest of trees in management unit 1 during
time period 1. This approach assumes that the
decision variables are assigned only integer values,
where 1 = yes, harvest the trees in the management
unit, and 0 = no, do not harvest the trees in the
management unit. Obviously, only one of the two
choices would be possible with this constraint. For
multiple time periods (a green-up period that is longer
than a single time period), multiple pairwise
constraints may be necessary.
MU1P1 + MU2P1 <= 1
(2)
MU1P1 + MU2P2 <= 1
(3)
MU1P1 + MU2P3 <= 1
(4)
In the example above, if the trees in management
unit 1 are scheduled for harvest during time period 1
(e.g., MU1P1 = 1), then the trees in management unit
2 are not allowed to be harvested during time periods
1, 2, and 3.
What may not be obvious in this approach is that
the equations reflecting the constraints must be
constructed prior to solving the problem with an
optimization technique. If the green-up period
changes (lengthens or shortens), or the rules for
defining adjacent land areas change, the equations
would need to be re-developed.
2.1.2 Heuristic Approach
When a forest planning problem is being solved
(attempted to be optimized) with a heuristic approach,
computer logic (If-Then-Else statements, For-Next
loops, etc.) is used to assess constraints in real time.
For example, if a heuristic is attempting to schedule a
final harvest for management unit 1, it assesses all of
the potential constraint violations prior to formally
assigning the harvest period to that management unit.
To enable the assessment of adjacency constraints
within a heuristic, a list of the adjacency relationships
among the management units is often held in memory
of the computer program, and this list is accessed
when it is needed. The list may be as simple as:
1,2
1,3
1,4
2,1
2,12
3,1
3,4
...
This adjacency list suggests that management unit
1 is adjacent (however defined) to management units
2, 3, and 4. The list is redundant, as it also indicates
that in addition to management unit 1 being adjacent
to management unit 2, management unit 2 is adjacent
to management unit 1. To improve the efficiency of
this process, the list of adjacency relationships might
be sorted by management unit number, and pointers
might be developed to quickly access the beginning
and ending set related to a specific management unit.
For example, the pointers for management unit 2 are
4 (beginning line number) and 5 (ending line
number). This structure might be composed of a
single column vector once the beginning and ending
points for each management unit are known.
As an example of how a heuristic process would
assess the unit restriction adjacency constraint,
imagine that the trees in management unit 2 are
potentially being scheduled for final harvest during
time period 1. The logic within a heuristic would
check all of the neighbours of management unit 2 to
determine whether their trees are currently scheduled
for harvest during the same period of time.
Constraint violation = 0
For a = Beginning pointer (Management
Unit 2) to Ending pointer (Management
unit 2)
If (Potential harvest period
(Management unit 2) = Scheduled
harvest period (Adjacency list (a)))
Then
Constraint violation = 1
End If
Next a
Here, potential harvest period (Management unit 2)
is time period 1, and the scheduled harvest periods of
neighbours are determined by understanding who the
neighbours are from the adjacency list. In this
approach, there would be no need to re-develop
equations to assess the adjacency relationships. One
would only need the assumption of the green-up
period length to enable the logic to work during the
heuristic search process. If the green-up period were
longer than one time period within the time horizon,
the logic would expand to:
LowerPeriod = Potential harvest period
(Management unit 2)
- (Greenup window -
1)
UpperPeriod = Potential harvest period
(Management unit 2)
+ (Greenup window -
1)
GISTAM 2023 - 9th International Conference on Geographical Information Systems Theory, Applications and Management
138

Constraint violation = 0
For a = Beginning pointer (Management
Unit 2) to Ending pointer (Management
unit 2)
If (Scheduled harvest period
(Adjacency list (a)) >= LowerPeriod
AND Scheduled harvest period
(Adjacency list (a)) <= UpperPeriod)
Then
Constraint violation = 1
End If
Next a
Here, LowerPeriod and UpperPeriod represent
the bounds on the green-up period, or the time periods
that represent the beginning and ending of the green-
up period with respect to the potential schedule of a
harvest in Management unit 2 during time period 1.
Of course, some minor additional logic would be
necessary to ensure that LowerPeriod and
UpperPeriod are reasonable (i.e., greater than 0 and
less than or equal to the total number of time periods).
One advantage to the heuristic approach is that the
entire set of equations that define the adjacency
relationships need not be pre-defined, as the
relationships are assessed in real time, when needed.
2.2 Area Restriction Adjacency
The concept of area restriction adjacency in forest
and natural resource management is also used within
mathematical processes related to the development of
a tactical forest plan. In fact, this model of controlling
adjacent management activities is more closely
associated with common practice than the unit
restriction model, as management units defined in a
geographic information system may be of various
sizes, and combining them for on-site management
may be more practical than managing them
separately.
Area restriction adjacency constraints would
allow the assignment of similar activities to two or
more adjacent management units during a specific
period of time, as long as the total size of the
contiguous set of activities does not exceed some
maximum, assumed size. For example, if the final
felling of trees in two management units were under
consideration, an area restriction adjacency constraint
would allow the assignment of the fellings to occur
during the same period of time only if their total size
did not exceed some assumed maximum size.
Depending on the size of management units
(polygons) developed within a geographic
information system, and the assumed maximum size,
this collection of adjacent management units with
similar activities assigned can be brief (2 or 3
management units) or extensive (many management
units). For final harvests, the complicating factor is
the green-up period, and therefore here, the constraint
needs to be assessed from the perspective of each
management unit within the collection of adjacent
management units.
2.2.1 Exact Approach
Several methods for developing the equations that
would allow multiple forest management units that
are connected to be managed during a common period
of time have been described in the literature (e.g.,
Meneghin et al. 1998, Murray and Church 1996). For
this illustration we use the path model that was
described by McDill et al. (2002), as it concisely
illustrates an exact approach for modelling area
restriction adjacency.
Imagine that there are a collection of forest
management units of various sizes, and that there is
some assumed maximum area size (A) for final
harvests of the trees. Beginning with any two adjacent
pairs of management units, if the combined area of
these exceeds A, then a pairwise adjacency constraint
can be developed to prevent both of the management
units from being scheduled for harvest during a
specific period of time (i.e., the length of the green-
up period), just as we noted earlier. However, if the
combined size of the two management units is less
than A, it is possible that both can be scheduled for
harvest during the same period of time. In this latter
case, an examination of all of the adjacent neighbours
to these two management units would be made to
define the clusters of management units whereby the
last one added would force the total size of the cluster
to exceed A.
For example, assume management units 1-4 are
adjacent in one form or another. Assume the areas of
these management units are respectively 10 ha, 12 ha,
15 ha, and 10 ha. If A = 40 ha, then all four
management units should not be scheduled for a final
harvest during a period of time defined by the green-
up period. The exact approach constraints developed
to prevent scheduling all four during time period 1 of
a planning process would be devised in this manner
MU1P1 + MU2P1 + MU3P1 + MU4P1 <= 3
(5
)
which allows up to three of the management units to
be scheduled for a harvest during time period 1, but
not all four of them. In other words, from none to any
three of the management units can be scheduled for
harvest during time period 1 based on their adjacency
relationships.
Modelling Spatial Connectivity of Forest Harvest Areas: Exact and Heuristic Approaches
139

The "path" in the path model reflects the
connectivity of management units. Some
management units in the resulting cluster may not be
themselves adjacent, yet a cluster is formed that
connects all of those considered. All possible paths
that originate from each management unit, that relate
to the possible final harvest of the trees in that
management unit during different periods of time,
must be assessed to develop these constraints.
Further, redundant and dominated constraints (made
ineffective based on other constraints) should
preferably be avoided, which may add considerable
time to the development of the set of exact approach
constraints.
As with the unit restriction model, equations
reflecting the constraints must be constructed prior to
solving the problem. If the green-up period changes
(lengthens or shortens) the equations would need to
be re-developed. The larger the A (maximum size)
and the longer the green-up period, the larger
becomes the set of constraints needed. This
development and management of constraint
equations to represent the adjacency relationships is
perhaps the most important disadvantage of using an
exact approach to model spatial connectivity.
2.2.2 Heuristic Approach
As an example of how a heuristic process would
assess the area restriction adjacency constraint,
imagine that the trees in management unit 2 are
potentially being scheduled for final harvest during
time period 1. The logic within a heuristic would
check all of the neighbours and place them in a set of
management units that forms a harvest block, as long
as the trees within the neighbouring management
units are already scheduled for harvest within the
green-up period, and as long as the total size of the
harvest block is less than the maximum size (A)
allowed. The example below begins with
management unit 2, and illustrates the building of
harvest block based on the prior harvest schedules
assigned to nearby neighbouring management units.
Constraint violation = 0
Block size = Size (Management Unit 2)
Queued (1) = Management Unit 2
Do While Queued (1) > 0
For a = Beginning pointer (Queued (1))
to Ending pointer (Queued (1))
If (Potential harvest period
(Queued (1)) = Scheduled harvest
period (Adjacency list (a))) Then
Place Adjacency list (a), the
adjacent neighbour, in the next
empty cell of the Queued array.
Block size = Block size + Size
(Adjacency list (a))
If (Block size > A) Then
Constraint violation = 1
Exit Loop
End If
End If
Next a
"Seated" Management unit = Queued (1),
remembering member(s) of the harvest
block
The Queued array is then adjusted,
moving neighbouring management units
up 1 place
Loop
In addition to this abbreviated process, several
additional checks and balances may be needed. For
example, when neighbouring management units are
identified, they are ignored if they are already present
in the Queued array or if they are "Seated" as part of
the harvest block. If the logic suggests a constraint
violation has occurred, the resulting harvest block is
too large, and the proposed management activity
originally under consideration (in this case, the
harvest of trees in management unit 2 during time
period 1) is disallowed. However, if the resulting
harvest block does not exceed the maximum allowed
size, the proposed management activity may be
allowed to be scheduled within the framework of a s-
metaheuristic (e.g., simulated annealing, tabu search),
assuming the solution is feasible with respect to all
other constraints and other heuristic rules allow the
change to be made to the current feasible solution.
The main disadvantage of this heuristic approach
to modelling spatial connectivity is the programming
logic needed to efficiently and correctly represent the
development of a sprawling harvest block. Further,
when the green-up period is longer than one time
period, the assignment of harvest period to the focal
management unit in the process (the management unit
in position Queued(1)) defines the LowerPeriod and
UpperPeriod that were mentioned earlier. These
periods of time only relate to management unit 1, and
subsequently they need to be adjusted to assess
constraint violations related to all of the management
units in the Queued array (making them temporarily
the focal unit in this process).
2.3 Case Study
The application of unit restriction and area restriction
adjacency constraints is applied to a forested tract of
land situated in the western United States. The
management plan devised for this property has a 30-
year time horizon that consists of six, 5-year time
GISTAM 2023 - 9th International Conference on Geographical Information Systems Theory, Applications and Management
140

periods. The goal of the planning process is to provide
a guide to the forest managers, suggesting which
management units to harvest trees in each of the six
time periods, while minimizing deviations from a pre-
defined sustainable flow of wood products (13,950
thousand board feet
1
of wood per 5-year time period).
When the area restriction adjacency constraint is
employed, the maximum size was assumed to be 48.6
hectares (120 acres).
The exact approach described for the URM case
was formulated as a mixed integer programming
model and solved using Lingo Extended 19.0 (Lindo
Systems Inc., 2022). The heuristic approaches that are
described here for both the URM and ARM cases
embedded into a threshold accepting heuristic model
that employed search reversion and 2-opt moves
(Bettinger et al., 2015). The exact model produced the
optimal solution to the problem, while the heuristic
model produced the near-optimal solutions to the
associated problems.
2.3.1 Landscape Data
The case study forest (1,841.5 hectares) is contiguous
(Figure 1) and composed of 87 management units that
contain Douglas-fir (Pseudotsuga menziesii) and
western hemlock (Tsuga heterophylla) trees of
various ages. This case study forest has been
employed in several other research studies regarding
optimization methods for developing forest plans
(Akbulut et al., 2017, Bettinger et al., 2015, Restrepo
et al., 2022).
3 RESULTS
For the case study landscape described above, the
exact method for developing a forest plan that
accommodates unit restriction adjacency constraints
for final harvests requires 1,260 non-redundant
pairwise adjacency constraints when the green-up
period is one time period. As the size of the green-up
periods increases, the number of pairwise constraints
for this case study forest increases: 3,360 pairwise
constraints for two-period green-up, 5,040 pairwise
constraints for three-period green-up, 6,300 pairwise
constraints for four-period green-up, and so on. The
increase is not linear, as the green-up period extends
beyond the last period of time horizon (for
UpperPeriod), or before the first period of the
time horizon (for LowerPeriod), fewer pairwise
1
a board foot is 1 inch thick × 1 foot tall × 1 foot wide, or
2.54 cm thick × 30.48 cm tall × 30.48 cm wide.
Figure 1: The contiguous case study forest area.
constraints are necessary. The heuristic method
requires no pre-defined adjacency constraints, as it
checks the constraint violations with each attempted
adjustment to feasible solutions in real time as the
optimization problem is being solved. The logic
required to assess the constraints within a heuristic
can be as simple as the six lines of code noted above,
however, additional logic would be required to read
and store the adjacency list, and to create the pointers
for each stand to efficiently access the adjacency list.
An example forest plan, or coloured graph, that
represents the planned harvest period for each
management unit, recognizing unit restriction
constraints, is illustrated in Figure 2.
The exact method for developing a forest plan that
accommodates area restriction adjacency constraints
for final harvests requires 2,046 non-redundant, non-
dominated adjacency constraints when the green-up
period is one time period. As the number of green-up
periods increases, the number of constraints for this
case study forest increases substantially: 22,040
constraints for two-period green-up, 74,988
constraints for three-period green-up, and 146,238
constraints for four-period green-up. Like the
Modelling Spatial Connectivity of Forest Harvest Areas: Exact and Heuristic Approaches
141
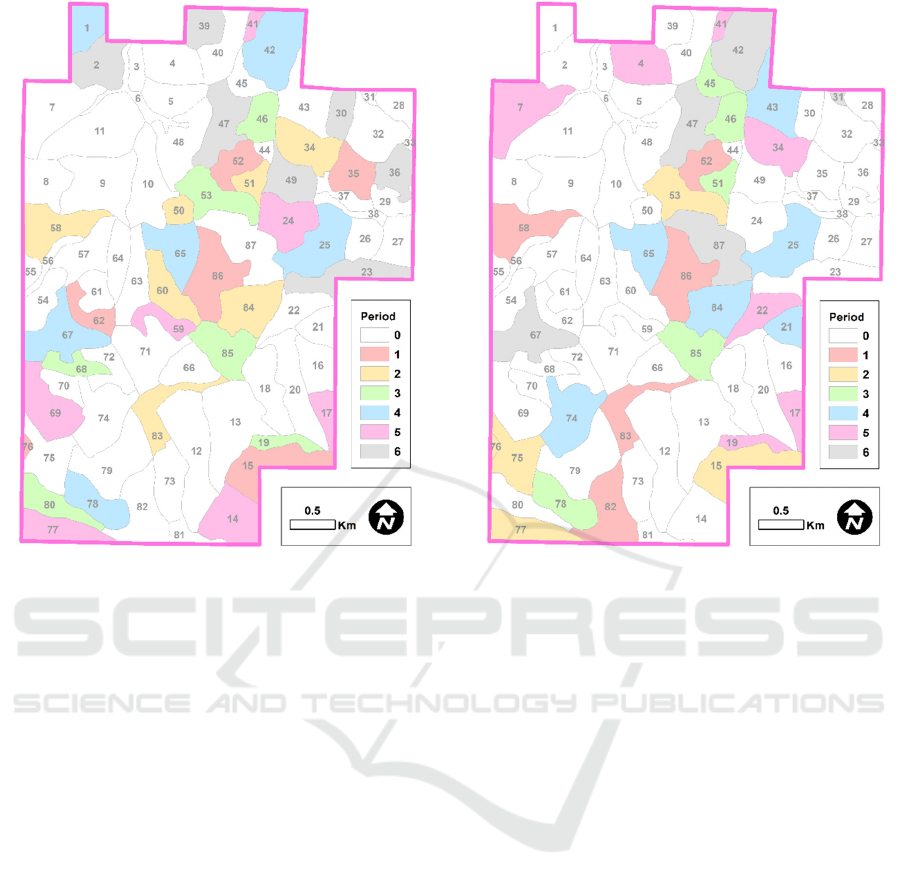
Figure 2: A forest plan that indicates the time period to
harvest the trees in each management unit, while
accommodating unit restriction adjacency constraints with
a green-up length of one time period.
previous case, the increase is not linear, but is it
certainly more substantial.
The combinations of management units that just
exceed the maximum area size, as the last one is
added, can be large when the management units are
small relative to the maximum area size. For this case
study landscape, one non-dominated area restriction
constraint contained six management unit decision
variables when the maximum area size was 48.6 ha,
and 8 non-dominated area restriction constraints
contained five management unit decision variables.
An example forest plan, or coloured graph, that
represents the planned harvest period for each
management unit, recognizing area restriction
constraints, is illustrated in Figure 3.
As suggested earlier, when it is necessary, removing
the redundant and the dominated constraints can be
cumbersome. For example, the constraint
MU1P1 + MU2P1 + MU3P1 + MU4P1 <= 3
(6)
is dominated by
MU1P1 + MU2P1 + MU4P1 <= 2
(7)
since if the latter is true, then the former must also be
true.
Figure 3: A forest plan that indicates the time period to
harvest the trees in each management unit, while
accommodating area restriction adjacency constraints with
a green-up length of one time period.
As noted earlier, one of the challenges when
utilizing an exact method for constraining the timing
and placement of forest management activities is in
reconstructing the area restriction model adjacency
constraints when the maximum area size or the green-
up period length changes. For example, a landowner
may wish to assess through modelling the impact of
various green-up or maximum final harvest size
policies on the production potential or economic
outcomes of a forest plan. For these purposes, the
development of adjacency constraints for an exact
method would likely require a separate computer
program to assess the relationships and remove the
redundant and dominated constraints.
As in the unit restriction case, the heuristic
method requires no pre-defined area restriction
adjacency constraints, as it checks in real time (during
the optimization process) the constraint violations
with each attempted adjustment to feasible solutions.
However, the logic required to assess the constraints
within a heuristic can require an extensive amount of
computer code to track the so-called queued and
seated management units noted earlier.
GISTAM 2023 - 9th International Conference on Geographical Information Systems Theory, Applications and Management
142

4 CONCLUSIONS
Described in this paper are methods for modelling the
connectivity of forest harvest areas, with particular
emphasis on the development of a tactical forest
management plan that prevents adjacent final
harvests of trees in management units located across
a forested area. Two common operations research
approaches for developing tactical forest
management plans that involve exact and heuristic
methods were described. The exact methods for
modelling unit restriction adjacency and area
restriction adjacency are well known within the
forestry community (e.g., McDill et al. 2002). The
heuristic method for assessing unit restriction
adjacency has been described in a number of
published papers over the last two decades (e.g.,
Akbulut et al., 2017, Bettinger et al. 2015, Bettinger
and Boston 2008). The logic for assessing area
restriction adjacency has only been described in a
theoretical sense in prior works, therefore the process
described here may be one of the first explicit
examples of how one might model area restriction
adjacency using computing logic.
As was illustrated in this paper, the number of a
priori defined constraints for exact URM and ARM
approaches that acknowledge and control the
adjacency of management activities can be quite
extensive, depending on the spatial management unit
size and the scope of local analysis rules. In contrast,
the heuristic approaches require only logic to assess
these relationships when they are needed during the
mathematical scheduling of management activities.
Regardless of the approach for developing a forest
plan or assessing the impact management activities
across a landscape, the exact and heuristic approaches
have both advantages and disadvantages that may be
of importance to scholars and practitioners. Future
work might involve studies designed to further
understand the time and effort needed to
accommodate these approaches as property size
increases and as spatial unit sizes change. These
investigations would advance our understanding how
the results from applying these methods may be
generalizable across different forest landscapes.
REFERENCES
Akbulut, R., Bettinger, P., Ucar, Z., Obata, S., Boston, K.,
Siry, J. (2017). Spatial forest plan development using
heuristic processes seeded with a relaxed linear
programming solution. Forest Science. 63(5): 518-528.
Bettinger, P., Boston, K. (2008). Habitat and commodity
production trade-offs in Coastal Oregon. Socio-
Economic Planning Sciences. 42(2): 112-128.
Bettinger, P., Demirci, M., Boston, K. (2015). Search
reversion within s-metaheuristics: Impacts illustrated
with a forest planning problem. Silva Fennica. 49(2):
article id 1232.
Bettinger, P., Sessions, J. (2003). Spatial forest planning:
To adopt or not to adopt? Journal of Forestry. 101(2):
24-29.
Forest Stewardship Council-US (2019). FSC-US Forest
Management Standard (V1.1), Complete with: Family
forest indicators and guidance and supplementary
requirements for lands managed by the USDA Forest
Service. Forest Stewardship Council US, Conifer, CO.
Lindo Systems Inc. (2022). LINGO Extended 19.0. Lindo
Systems Inc., Chicago, IL.
Maine Forest Service (2017). The forestry rules of Maine
2017, A practical guide for foresters, loggers and
woodlot owners, 2
nd
edition. Maine Department of
Agriculture, Conservation & Forestry, Maine Forest
Service, Augusta, ME.
McDill, M.E., Rebain, S.A., Braze, J. (2002). Harvest
scheduling with area-based adjacency constraints.
Forest Science. 48(4): 631-642.
Meneghin, B.J., Kirby, M.W., Jones, G.J. (1988). An
algorithm for writing adjacency constraints efficiently
in linear programming models. U.S. Department of
Agriculture, Forest Service, Rocky Mountain Forest
and Range Experiment Station, Ft. Collins, CO.
General Technical Report RM-161. pp. 46-53.
Murray, A.T. (1999). Spatial restrictions in harvest
scheduling. Forest Science. 45(1): 45-52.
Murray, A.T., Church, R.L. (1996). Analyzing cliques for
imposing adjacency restrictions in forest models. Forest
Science. 42(2): 166-175.
Restrepo, H.I., Bettinger, P., Bullock, B.P. (2022). A
theoretical minimum solution for heuristics: The case
of the spatial timber harvest problem. Computers &
Operations Research. 143: Article 105792.
SFI USA. (2022). SFI 2022 forest management standard,
Section 2. SFI USA, Washington, D.C.
Modelling Spatial Connectivity of Forest Harvest Areas: Exact and Heuristic Approaches
143
