
Camera-Based Tracking and Evaluation of the Performance of a Fitness
Exercise
Linda B
¨
uker
1 a
, Dennis Bussenius
1
, Eva Schobert
2
, Andreas Hein
1 b
and Sandra Hellmers
1 c
1
Assistance Systems and Medical Device Technology, Carl von Ossietzky University Oldenburg, Oldenburg, Germany
2
Herodikos GmbH, Hans-Sch
¨
utte-Str. 20, 26316 Varel, Germany
Keywords:
Azure Kinect DK, Health, Human Pose Analysis, Exercise Analysis.
Abstract:
Back pain is a significant condition worldwide that is becoming more common over the years. Although
individually adapted exercise therapy would be very successful, the problem is - due to lack of capacity -
it is rarely prescribed by physicians. We analyse if it is feasible to automatically track and evaluate the
performance of an exercise used in a fitness check to support physicians in adapting exercise therapy and
thereby providing that kind of treatment to more patients. A depth camera with body tracking is used to detect
the pose of the subjects. We have developed a system that evaluates the execution of an exercise in terms of
correct performance based on the recognized joint positions. The feasibility study conducted shows, that it is
important to avoid as many occlusions of any kind as possible to get the best achievable body tracking. Then,
however, the evaluation of the performance of the tested finger-floor-distance exercise seems feasible.
1 INTRODUCTION
Lower back pain is a significant epidemiological bur-
den worldwide, especially in countries with a high
socio-demographic index, with a remarkable increase
in the last years (Mattiuzzi et al., 2020). The number
of hospital cases with a primary diagnosis of “back
pain” among the 2.5 million members of the German
health insurance “DAK-Gesundheit” has increased by
80% from 2007 to 2016 (Marschall et al., 2018).
While the 2003/2006 German Back Pain Study found
that up to 85% of the population experience back pain
at least once in their lifetime (Schmidt et al., 2007),
61.3% of the German population in 2021 reported
having suffered from it in the past 12 months (von der
Lippe et al., 2021). Therefore back pain is one of the
most common physical complaints (Saß et al., 2015).
Long-term success with back pain is achieved
through exercise therapy (Bredow et al., 2016), for
which an individual adaptation is mandatory, in
view of the patients needs (Hoffmann et al., 2010).
Thereby, information regarding the patient’s fitness,
for instance, is required for individual adaptation
(Barker and Eickmeyer, 2020) and can be assessed
a
https://orcid.org/0000-0002-6129-0940
b
https://orcid.org/0000-0001-8846-2282
c
https://orcid.org/0000-0002-1686-6752
by physicians in a fitness check. However, physi-
cians often do not have sufficient time with every pa-
tient (Irving et al., 2017), which means that a fitness
check can not be conducted and thus exercise therapy
is rarely integrated into the patient’s treatment plan.
As a result, in 2017, only less than one third of Amer-
ican population with back pain got exercise therapy as
treatment (statista, 2022).
To open exercise therapy to a large number of pa-
tients, a technology-based approach could be used to
automate the tracking and evaluation of the aforemen-
tioned fitness check. Hereby the physician would be
supported in terms of time, which enables more fre-
quent application of these checks. First, however, the
feasibility of such an approach needs to be tested.
Therefore, we developed a system to automatically
track and evaluate a fitness exercise, the finger-floor-
distance exercise, and tested it in a preliminary study.
2 STATE OF THE ART
To the best of our knowledge, there is only one study
evaluating the finger-floor-distance, among other ex-
ercises, automatically. For this, a marker-based opti-
cal motion capture system was used (Garrido-Castro
et al., 2012). In general, to evaluate an exercise,
the movement of the person has to be tracked first.
Büker, L., Bussenius, D., Schobert, E., Hein, A. and Hellmers, S.
Camera-Based Tracking and Evaluation of the Performance of a Fitness Exercise.
DOI: 10.5220/0011755700003414
In Proceedings of the 16th International Joint Conference on Biomedical Engineering Systems and Technologies (BIOSTEC 2023) - Volume 5: HEALTHINF, pages 489-496
ISBN: 978-989-758-631-6; ISSN: 2184-4305
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
489

This can be done via body-worn systems such as mo-
tion capture suits or marker-based camera systems.
However, these systems have the disadvantage that
they are usually time-consuming and require exper-
tise (Carse et al., 2013). In addition, the systems
can restrict the person’s freedom of movement, thus
hindering the execution of a fitness check. There-
fore, the use of external marker-less systems, such as
body tracking systems using camera images, is rea-
sonable. There are multiple approaches to body track-
ing systems via RGB-images (Cao et al., 2019; Bulat
et al., 2020; Liu et al., 2021). Although these systems
achieve very accurate results, they only track people
in two dimensions, which means that depth informa-
tion cannot be represented well. Therefore, there are
also some approaches that perform body tracking in
three dimensions (Ye et al., 2011; Chun et al., 2018;
B
¨
uker et al., 2021). One of these approaches was de-
veloped by Microsoft: the Azure Kinect Body Track-
ing SDK (Microsoft Inc., 2020), which can track mul-
tiple people (with 32 joint points each) in real time
on the depth images of the Azure Kinect DK camera.
Previous analyses have shown the resulting accuracy
of the SDK, in comparison to the Vicon system (Vicon
Motion Systems, Oxford, UK) as gold standard: de-
pending on the joint considered, the mean euclidean
distance between the two systems is between 10 mm
and 60 mm (Albert et al., 2020); the root mean square
error (RMSE) of the joint angles is between 7.2° and
32.3° for the lower extremities (Ma et al., 2020).
For the considered exercise, not only the tracking
of the person is relevant, but also the relation of fin-
ger to floor plane. There are multiple approaches us-
ing depth images for fall detection by calculating the
distance of the persons head and/or persons centroid
to the floor. The required plane of the floor is either
determined by a predefined area/points (Yang et al.,
2015), or planes are detected in the depth image by us-
ing a RANSAC-based approach (Diraco et al., 2010).
After the person’s pose and the floor are detected,
it must be evaluated whether the exercise is performed
correctly. A classification model can be used to de-
tect, for example, whether a ski jumper on a video per-
forms a bad pose while jumping (Wang et al., 2019).
Several approaches compare body angles between the
user and a professional who has previously performed
the exercise once. Here, the quality of execution is
either solely classified (Alabbasi et al., 2015) or, in
addition, a continuous color coding of the individual
joint angles is visually displayed (Thar et al., 2019).
A comparison of joint angles between several persons
can also be used to compare multiple dancers to each
other for synchronization by continuously color cod-
ing the considered parts of displayed skeletons (Zhou
et al., 2019). Another possibility is the use of rules,
that state how various body angles, distances, or po-
sitions should be for a correct execution and clas-
sify each rule into satisfied or not satisfied (Conner
and Poor, 2016; Rector et al., 2013; Chen and Yang,
2018). The result is either output visually or auditory,
giving correction suggestions in case the rules are not
fulfilled.
3 MATERIALS AND METHODS
In the following, the considered exercise, study de-
sign, used sensor system, as well as the used rules
and analysis are described.
3.1 Exercise
The finger-floor-distance exercise has excellent met-
ric properties for patients with lower back pain (Per-
ret et al., 2001) and is used in multiple back pain
related studies (Gurcay et al., 2009; Olaogun et al.,
2004). Therefore, this paper analyzes the feasibil-
ity of automatic exercise evaluation using the finger-
floor-distance exercise as an example.
For the execution of the finger-floor-distance ex-
ercise, the knees, arms and fingers must be fully ex-
tended. The feet should be close together. The subject
then bends forward and tries to touch the floor with
the fingertips as close as possible. The distance of
the fingertips to the floor is measured for evaluation.
(Perret et al., 2001)
Figure 1 shows the performance of the finger-
floor-distance exercise.
Figure 1: Finger-Floor-Distance exercise.
3.2 Study Design
To analyze the feasibility of a camera-based auto-
matic evaluation of the finger-floor-distance exercise,
we conducted a study with 10 subjects between the
ages of 23 and 30 (4 women, 6 men) with a height
between 168 cm and 191 cm. The subjects performed
the exercise finger-floor-distance twice with different
HEALTHINF 2023 - 16th International Conference on Health Informatics
490

finger to floor distances and/or different knee angles.
This ensured that a wide variety of positions were
tested. The subjects were filmed by two depth cam-
eras. The knee angle and the distance between fin-
gertips, as well as hands, and floor were measured
manually with a goniometer and a tape measure as
ground truth. The test procedures were approved by
the local ethics committee (ethical vote: Carl von
Ossietzky University Oldenburg, Drs.EK/2021/067)
and conducted in accordance with the Declaration of
Helsinki.
3.3 Applied Sensor System
In order to evaluate the finger-floor-distance exercise,
the subject is recorded during the exercise perfor-
mance. Two Azure Kinect DK RGB-D cameras are
used for this purpose to generate twice as much data.
The Kinect measures the depth with a time-of-flight
camera. It has a typical systematic error of <11 mm +
0.1% of the objects distance and a random error with a
standard deviation of ≤17 mm (Microsoft Inc., 2021).
Both cameras are positioned at an angle of about 45°
to the persons front (left and right respectively) in or-
der to try to avoid as much occlusion of the subjects
legs by the subjects arms (see Figure 2). The cameras
are started with the following configuration parame-
ters:
• color resolution: 1536p (2048 pixel x 1536 pixel),
• depth mode: narrow field of view binned,
• frame rate: 30 frames per second,
• inertial measurement unit (IMU) enabled.
Both cameras are evaluated individually. However,
they are synchronized with an aux cable to ensure that
they do not interfere with each other. The cameras are
connected to the same computer (Windows 10 oper-
ating system) and can be started via console call. Ac-
cording to T
¨
olgyessy et al. (T
¨
olgyessy et al., 2021),
the cameras were warmed up for one hour before the
actual recording.
To track the subject’s pose, the Azure Kinect Body
Tracking SDK is used. The Azure Kinect with the
body tracking SDK has the additional advantage that
it also works in real-time and thus a direct evaluation
of the exercise is possible. Body Tracking is running
with CUDA as its processing mode.
The floor detector sample from Microsofts Azure
Kinect Samples
1
is used to detect the floor plane,
which is required for calculating the distance from the
fingers and hands to the floor. The floor detector needs
IMU-data of the camera as well as the depth image to
1
https://github.com/microsoft/Azure-Kinect-Samples
(a) Schematic setup top view.
(b) Schematic setup frontal view.
Figure 2: Overview of the experimental setup.
generate a floor plane whose equation is provided in
normal form (see Section 3.5).
3.4 Rules
We decided to use rules instead of a machine learning
approach to detect whether the finger-floor-distance
exercise was performed correctly, and if so, how well.
The use of rules has the advantage that we don’t need
a large amount of data, as is usually needed for ma-
chine learning approaches. Additionally, we already
know the exact logic to decide whether a performance
is correct or not, which makes a rule-based approach
useful and explainable.
To evaluate whether the execution of the finger-
floor-distance exercise is correct, the compliance of
the following rules must be observed.
1. Feet Distance: The feet of the subject need to
be close together. Therefore, the system checks
whether the distance of the subjects feet is less
than the distance of the subjects hips. If the feet
are more than hip-width apart, the exercise is clas-
sified as incorrect.
2. Knee Angle: The knees need to be fully extended
as bending the knees give the subject an advan-
tage and leads to an incorrect performance. The
knees are fully extended when the knee angle (an-
gle between lower leg and thigh) is 180°. Since
not every person can extend their knees to 180°, it
is checked whether the knee angle is greater than
or equal to 170°.
During the exercise, the arms and fingers must also
be fully extended. Since not extending the arms or
fingers would lead to a worse result, this is not tested
at this point.
After evaluating whether the exercise was per-
formed correctly, it is necessary to check how well the
exercise is executed. For this purpose, the following
is analyzed:
Camera-Based Tracking and Evaluation of the Performance of a Fitness Exercise
491

3. Finger Floor Distance: The closest distance of
the fingertip (and hand) position to the plane
defining the floor, needs to be calculated. If rule 1
and 2 are fulfilled, this distance is the result of the
finger-floor-distance exercise.
3.5 Analysis
To analyze the performance of the finger-floor-
distance exercise, the previous described three rules
need to be checked for every frame of the video.
For rule 1, the correct f eet distance at timestamp
t need to be measured as following:
correct f eet distance
t
= d f eet
t
< d hips
t
, (1)
where d f eet and d hip are calculated as
d { f eet, hips}
t
(p
t
,q
t
) =
q
(p
t,x
− q
t,x
)
2
+ (p
t,y
− q
t,y
)
2
+ (p
t,z
− q
t,z
)
2
,
(2)
where
p
t,{x/y/z}
= position of the left ankle/hip at
frame t for axis x/y/z respectively,
q
t,{x/y/z}
= position of the right ankle/hip at
frame t for axis x/y/z respectively.
For the correct knee angle at time t (rule 2), the
knee angle α needs to be greater or equal than 170°:
correct knee angle
t
= α
t
≥ 170
◦
(3)
with
α
t
= 180 − (
180
π
· arccos(
⃗
AB
norm,x
·
⃗
BC
norm,x
+
⃗
AB
norm,y
·
⃗
BC
norm,y
+
⃗
AB
norm,z
·
⃗
BC
norm,z
)),
(4)
where
⃗
AB
norm,x
=
⃗
AB
x
q
⃗
AB
2
x
+
⃗
AB
2
y
+
⃗
AB
2
z
(5)
and
⃗
AB
norm,{y,z}
, as well as
⃗
BC
norm,{x,y,z}
respectively.
Here
⃗
AB is the vector from the hip position to the knee
position at frame t, while
⃗
BC is the vector from the
knee position to the ankle position at frame t. The an-
gle for the right and left half of the body is calculated
in each frame.
For rule 3, the distance between a point p (posi-
tion of left and right fingertip and hand respectively)
and the floor plane f needs to be calculated for every
frame t. The floor plane is given in normal form and
therefore consists of a normal vector N and a point on
the plane, the origin, O, as well as the constant C:
C = (N
x
· O
x
+ N
y
· O
y
+ N
z
· O
z
) · −1 (6)
The distance d f then is calculated as:
d f
t
(p
t
, f
t
) =
|(p
t,x
· N
t,x
+ p
t,y
· N
t,y
+ p
t,z
· N
t,z
+C
t
)|
q
N
2
t,x
+ N
2
t,y
+ N
2
t,z
(7)
4 RESULTS
This section presents striking aspects found while
conducting the study, as well as a comparison be-
tween automatic evaluation and ground truth.
4.1 Striking Aspects
While analyzing the results, we noticed that some re-
sults are considerably worse than others. When visu-
alizing these results as point clouds together with the
detected skeleton using the simple 3d viewer from
Microsofts Azure Kinect Samples
1
, it has been ob-
served that the body tracking has detected the skele-
ton incorrectly in these cases. This occurred mainly
when the subjects’ hair was worn open. An example
frame is shown in Figure 3. It can be seen that, on
the one hand, the confidence with which a joint po-
sition was detected is low for the posterior arm and
leg. This can be identified from the only slight col-
oring of these joints and bones. On the other hand,
it can be observed that the skeleton was not detected
at the exact position, but was partially located outside
the subject’s body (also the posterior arm and leg).
Figure 3: Incorrect body tracking at arms, presumably due
to occlusion by openly worn hair. The point cloud was ro-
tated for a better view of the incorrect body tracking.
Upon further observation, it was noticed that some
of the subjects who were able to touch the floor with
their hands leaned slightly forward with their hands,
whereby their fingers could no longer be seen in the
image frame. This also seems to negatively influence
the body tracking and thus leads to poorer results.
HEALTHINF 2023 - 16th International Conference on Health Informatics
492
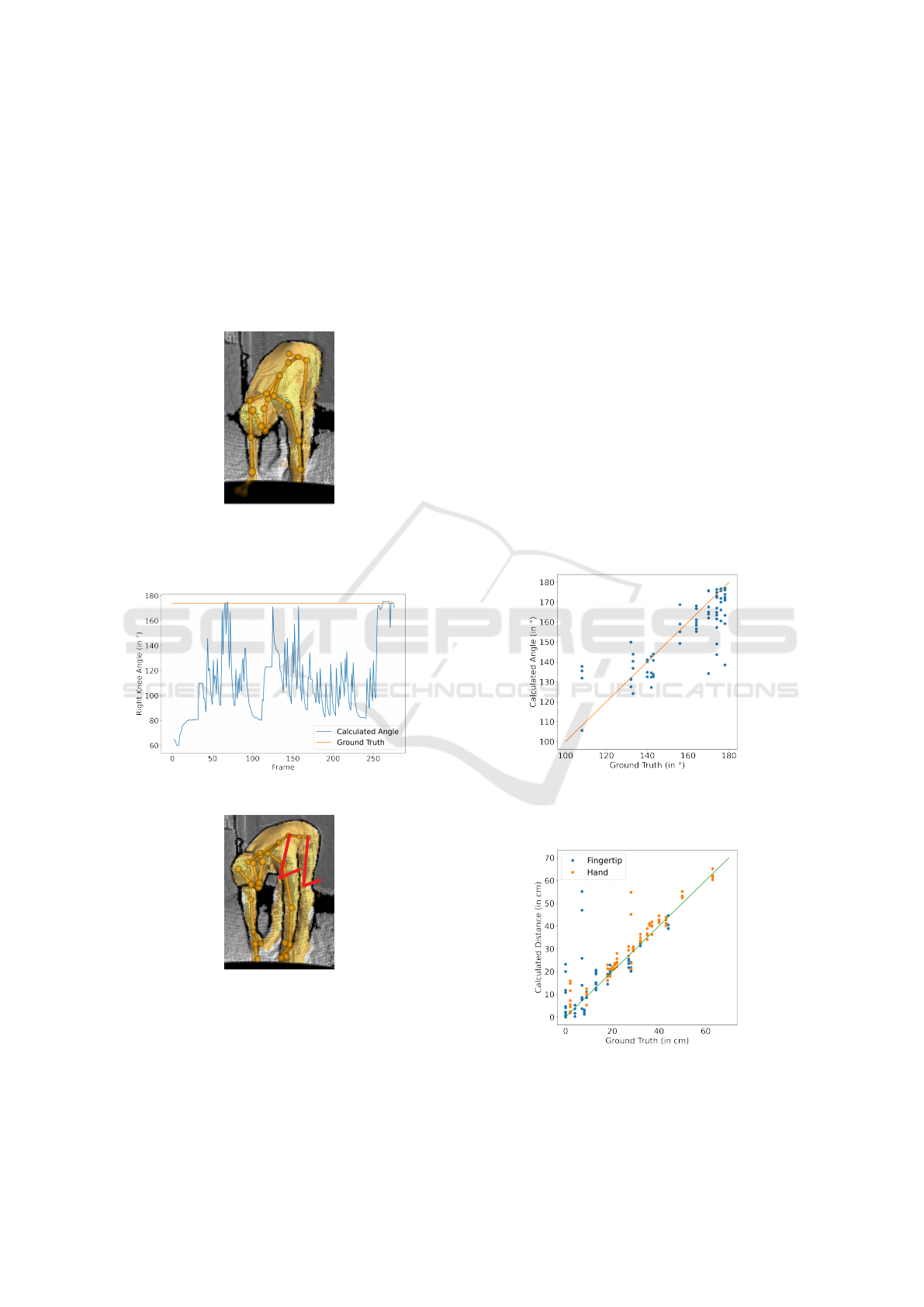
Figure 4 shows how the body tracking does not rec-
ognize the position of the hands and fingers, and thus
has to estimate them.
In the results of the analysis, it was also observed
that the knee angle sometimes varies greatly within
a recording (see Figure 5). On closer visual inspec-
tion, it is noticeable that the legs are in some cases
very poorly recognized and “float” in the air. Figure 6
shows the subject from Figure 5 with floating legs for
illustration.
Figure 4: Incorrect body tracking at hands, presumably due
to the fact that the hands are outside the frame. The posi-
tions of the hand on the left side of the frame is assumed to
be outside the point cloud by the body tracking.
Figure 5: Great variations in knee angle over time.
Figure 6: Incorrect body tracking at legs. The skeleton legs
are floating in the air, the subject’s legs are on the ground.
When calculating the distance from joint posi-
tions to the ground, the result depends not only on
body tracking, but also on the quality of floor plane
detection, since the floor is detected anew in every
frame. Therefore, we compared the floor planes of
each video with one another in terms of position and
orientation. Accordingly, the difference between the
closest distance of the camera to floor plane of all
frames and the angles between the normal vector of
all frames is calculated. For all videos, the difference
in position is between 0.0 cm and 4.35 cm (mean:
0.64 cm). The orientation differs between 0.0° and
1.13° with a mean of 0.244°. This suggests that the
detection of the floor may have an impact on the re-
sults, and therefore must be taken into consideration.
Due to the floating legs and the differences in floor
detection, the knee angle is only calculated in the fol-
lowing if the feet are a maximum of 5 cm from the
ground. This ensures that frames with strongly incor-
rect detection of the legs are disregarded.
4.2 Comparison with Ground Truth
In the subsequent analysis, the smallest and the mean
knee angle is calculated for all considered frames of
each video. Concurrently the smallest distance be-
tween fingertip, as well as hand, and floor is deter-
mined for every video.
Figure 7: Mean of the calculated knee angle vs. ground
truth. Visualized are all 80 data points (10 subjects with
two executions, two cameras and left and right side).
Figure 8: Minimal calculated distance of fingertip and hand
to floor vs. ground truth. Visualized are all 80 data points
(10 subjects with two executions, two cameras and left and
right side) each.
Camera-Based Tracking and Evaluation of the Performance of a Fitness Exercise
493
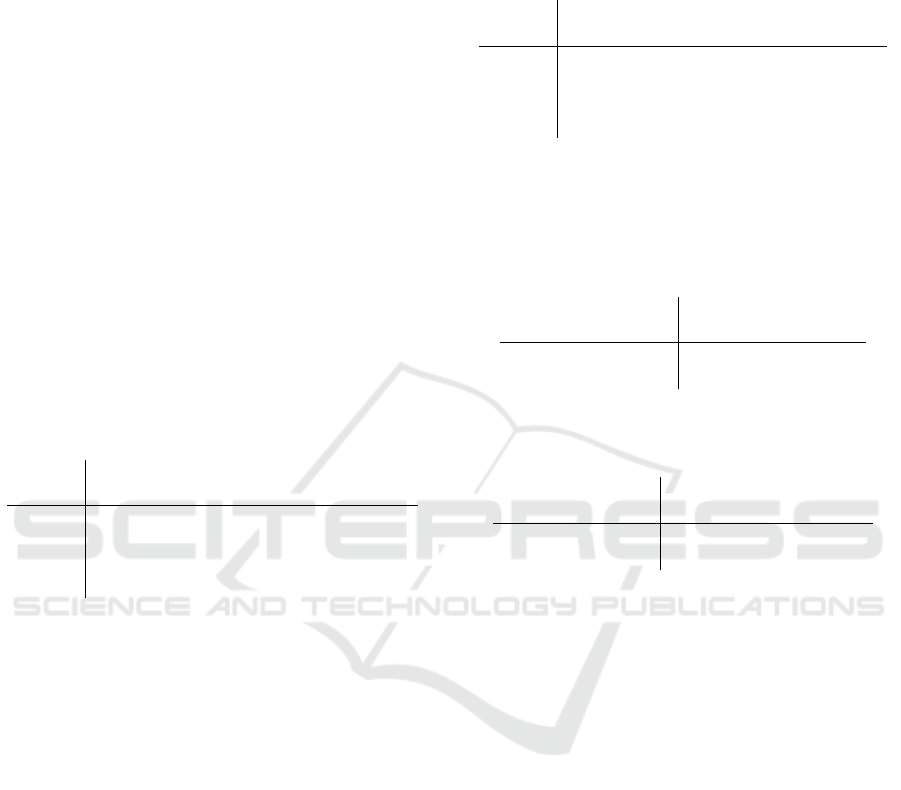
The distribution between the mean of the calcu-
lated knee angle per video and the ground truth, as
well as the distribution between the minimal calcu-
lated distance of the fingertips and hands to the floor
and the ground truth are shown in Figures 7 and 8.
One can see that although many calculated angles and
distances are very close to the ground truth, some
values show very strong differences. The difference
of the distance from fingertip to floor, for example,
ranges up to 48.2 cm, while the distance of the hand
has a maximum difference of 26.84 cm (see Table 1).
Not only the maximum difference of the fingertip is
bigger than of the hand, but Figure 8 also shows the
number of prominent outliers is bigger when looking
at the fingertips. It is also noticeable when looking
at Figures 7 and 8, that the distances of the finger-
tips and hands were calculated often larger than the
ground truth, while the average calculated knee angle
is mostly smaller than the ground truth.
Table 1: Minimal, maximal and mean difference as well as
RMSE of calculated and ground truth values for all 80 data
points (10 subjects, 2 executions, 2 cameras, left and right
side) each.
Distance (in cm) Knee Angle (in °)
Fingertip Hand Smallest Mean
Max 48.20 26.84 66.47 39.56
Min 0.00 0.04 0.14 0.04
Mean 4.33 3.21 18.54 8.08
RMSE 8.86 5.09 23.48 11.76
However, when leaving out the videos with an in-
correct body tracking due to occlusion by the sub-
ject’s hair as well as the videos with the subjects
hands outside of the frame, the maximum differences
between calculated values and ground truth are con-
siderably lower (see Table 2). The maximum differ-
ence of the smallest distance from fingertip to floor
is now approximately 40 cm smaller while the max-
imum difference of the hand is approximately 20 cm
smaller. The maximum differences of the knee an-
gle on the other side has remained (almost) the same.
The mean of the differences between calculated val-
ues and ground truth values is in all cases slightly
smaller when looking only at the videos with good
body tracking.
There are multiple possible thresholds for classi-
fying the quality of the exercise. Often, distances of
the fingertips of 0-10 cm are taken as typically (Janka
et al., 2019). The confusion matrix for a threshold of
10 cm is seen in Table 3. With ≤ 10 cm as the posi-
tive value, precision of these results is 1.0 and recall
is 0.94. The knees should be fully extended. As de-
scribed in Section 3.4, the threshold should therefore
be 170°. The confusion matrix for this threshold for
Table 2: Minimal, maximal and mean difference as well as
RMSE of calculated and ground truth values for videos with
good body tracking and visible fingertips (48 data points
each).
Distance (in cm) Knee Angle (in °)
Fingertip Hand Smallest Mean
Max 7.93 5.18 50.27 39.56
Min 0.00 0.11 0.14 0.04
Mean 2.82 2.41 15.47 7.14
RMSE 3.75 2.77 20.47 10.71
the mean of the knee angles is seen in Table 4. Here,
precision is also 1.0, while recall is 0.54, with > 170°
as the positive value.
Table 3: Confusion matrix for the distance of the fingertips
for videos with good body tracking and visible fingertips.
Calculated Distance
> 10 cm ≤ 10 cm
Ground
Truth
> 10 cm 32 0
≤ 10 cm 1 15
Table 4: Confusion matrix for the mean knee angle for
videos with good body tracking and visible fingertips.
Calculated Mean Angle
< 170° ≥ 170°
Ground
Truth
< 170° 20 0
≥ 170° 13 15
5 DISCUSSION
With the described study we tested if automated track-
ing and evaluation of an exemplary exercise with a
camera-based system is feasible. In this process we
noticed, that there are some major inaccuracies in the
results of the automatic tracking. The quality of the
body tracking seems to have a considerable influence
on the results. Poor body tracking is mainly caused
by hair/upper body occlusions or by body parts out-
side the image frame. When excluding the results
caused by these low quality body tracking outcomes,
the maximal differences between automatic evalua-
tion and ground truth are considerably reduced. This
showed, that the quality of the body tracking has an
impact on the results of an automatic exercise track-
ing and evaluation. When automatically analyzing
an exercise for a fitness check, possible causes for
occlusions should be taken into consideration and -
if identified- removed. Specifically, this means that
the subject should tie up his/her hair and wear tighter
clothing. Even though the influence of clothing was
not analyzed in this paper, it is reasonable to assume
HEALTHINF 2023 - 16th International Conference on Health Informatics
494

that loose clothing is more likely to cause occlusion
than tight clothing. In addition, the camera’s angle
of view must be chosen so that the camera sees as
many parts of the subject’s body as possible and there
is as little self-occlusion as possible. It also has to
be ensured that the subject is completely within the
camera’s field of view. In addition, the floor detec-
tion needs to be taken into account when analysing
distances between joint positions and the floor, as the
position and orientation of the floor plane varies be-
tween different frames.
A direct comparison with the systems described in
Section 2 is not possible because the focus of the eval-
uation of the other approaches was different. How-
ever, when looking at the accuracy of the position of
the hands of the body tracking during a gait analysis
compared to the accuracy of the hand/finger to floor
distances, our accuracy is very good. While the av-
erage euclidean distance between detected hand posi-
tion and ground truth is about 4.5 cm and 5.5 cm (Al-
bert et al., 2020), our average difference between min-
imal calculated hand-floor-distance and ground truth
is only about half as big. The RMSE of 11.9° of the
knee angle calculated in literature (Ma et al., 2020)
is very similar to the RMSE of the mean of our cal-
culated knee angle. Our RMSE of the smallest knee
angle, however, is about twice as high. Although all
frames with the feet further away from the floor than
5 cm were excluded, the smallest calculated angle is
probably still strongly influenced by the faulty body
tracking of the legs (such as the floating legs). This
can probably also be seen in the detected average knee
angle often being smaller than the ground truth. The
confusion matrix of the mean knee angle for videos
with good body tracking and visible fingertips shows
this as well: Almost half of all actual angles ≥ 170°
are detected incorrectly. The recall of the fingertip
distance, on the other hand, is considerably higher.
Only one > 10 cm calculated distance is actually ≤
10 cm. For fingertips and knees, all positive classified
values are actually positive. Considering these com-
parisons and the suggestions above, an analysis of the
fingertip distance is feasible. The average knee angle
is often smaller than the ground truth, but if this er-
ror is reduced, for example with better positioning of
the camera, the calculated angle should probably also
provide appropriate results.
In future work, attention should be paid to ad-
justing the camera’s angle of view to optimize body
tracking results and avoid occlusions. It can also be
tested whether other body tracking methods give bet-
ter results, and thus more accurate knee angles. Sub-
sequently, more exercises will be looked at to evalu-
ate if the automatic analysis of multiple exercises is
feasible. If this is the case, the software will then be
adapted to enable subjects to perform exercises inde-
pendently and have their execution tracked and eval-
uated automatically to help physicians to individually
adapt patient’s exercise therapies.
ACKNOWLEDGEMENTS
Funded by the German Federal Ministry of Education
and Research (Project No. 16SV8580), as well as by
the Lower Saxony Ministry of Science and Culture
(grant number 11-76251-12-10/19 ZN3491) within
the Lower Saxony “Vorab” of the Volkswagen Foun-
dation and supported by the Center for Digital Inno-
vations (ZDIN).
REFERENCES
Alabbasi, H., Gradinaru, A., Moldoveanu, F., and
Moldoveanu, A. (2015). Human motion tracking &
evaluation using kinect v2 sensor. In 2015 E-Health
and Bioengineering Conference (EHB), pages 1–4.
Albert, J. A., Owolabi, V., Gebel, A., Brahms, C. M.,
Granacher, U., and Arnrich, B. (2020). Evaluation of
the pose tracking performance of the azure kinect and
kinect v2 for gait analysis in comparison with a gold
standard: A pilot study. Sensors, 20(18).
Barker, K. and Eickmeyer, S. (2020). Therapeutic exercise.
The Medical clinics of North America, 104(2):189–
198.
Bredow, J., Bloess, K., Oppermann, J., Boese, C., L
¨
ohrer,
L., and Eysel, P. (2016). Konservative therapie beim
unspezifischen, chronischen kreuzschmerz. Der Or-
thop
¨
ade, 45:573–578.
Bulat, A., Kossaifi, J., Tzimiropoulos, G., and Pantic, M.
(2020). Toward fast and accurate human pose estima-
tion via soft-gated skip connections.
B
¨
uker, L. C., Zuber, F., Hein, A., and Fudickar, S. (2021).
Hrdepthnet: Depth image-based marker-less tracking
of body joints. Sensors, 21(4).
Cao, Z., Hidalgo Martinez, G., Simon, T., Wei, S., and
Sheikh, Y. A. (2019). Openpose: Realtime multi-
person 2d pose estimation using part affinity fields.
IEEE Transactions on Pattern Analysis and Machine
Intelligence.
Carse, B., Meadows, B., Bowers, R., and Rowe, P. (2013).
Affordable clinical gait analysis: An assessment of the
marker tracking accuracy of a new low-cost optical 3d
motion analysis system. Physiotherapy, 99(4):347–
351.
Chen, S. and Yang, R. (2018). Pose trainer: Correcting
exercise posture using pose estimation.
Chun, J., Park, S., and Ji, M. (2018). 3d human pose estima-
tion from rgb-d images using deep learning method.
In Proceedings of the 2018 International Conference
Camera-Based Tracking and Evaluation of the Performance of a Fitness Exercise
495

on Sensors, Signal and Image Processing, SSIP 2018,
page 51–55, New York, NY, USA. Association for
Computing Machinery.
Conner, C. and Poor, G. M. (2016). Correcting exercise
form using body tracking. In Proceedings of the
2016 CHI Conference Extended Abstracts on Human
Factors in Computing Systems, CHI EA ’16, page
3028–3034, New York, NY, USA. Association for
Computing Machinery.
Diraco, G., Leone, A., and Siciliano, P. (2010). An active vi-
sion system for fall detection and posture recognition
in elderly healthcare. In 2010 Design, Automation &
Test in Europe Conference & Exhibition (DATE 2010),
pages 1536–1541.
Garrido-Castro, J. L., Medina-Carnicer, R., Schiottis, R.,
Galisteo, A. M., Collantes-Estevez, E., and Gonzalez-
Navas, C. (2012). Assessment of spinal mobility
in ankylosing spondylitis using a video-based motion
capture system. Manual Therapy, 17(5):422–426.
Gurcay, E., Bal, A., Eksioglu, E., Hasturk, A. E., Gurcay,
A. G., and Cakci, A. (2009). Acute low back pain:
clinical course and prognostic factors. Disability and
rehabilitation, 31(10):840–845.
Hoffmann, M. D., Kraemer, W. J., and Judelson, D. A.
(2010). Therapeutic exercise. In Frontera, W. R. and
DeLisa, J. A., editors, DeLisa’s Physical Medicine
and Rehabilitation, chapter 61, page 1654. Lippincott
Williams & Wilkins Health, 5 edition.
Irving, G., Neves, A. L., Dambha-Miller, H., Oishi, A.,
Tagashira, H., Verho, A., and Holden, J. (2017). Inter-
national variations in primary care physician consul-
tation time: a systematic review of 67 countries. BMJ
open, 7(10):e017902.
Janka, M., Merkel, A., and Schuh, A. (2019). Diagnostik an
der lendenwirbels
¨
aule. MMW-Fortschritte der Medi-
zin, 161(1):55–58.
Liu, H., Liu, F., Fan, X., and Huang, D. (2021). Polar-
ized self-attention: Towards high-quality pixel-wise
regression.
Ma, Y., Sheng, B., Hart, R., and Zhang, Y. (2020). The
validity of a dual azure kinect-based motion capture
system for gait analysis: a preliminary study. In
2020 Asia-Pacific Signal and Information Processing
Association Annual Summit and Conference (APSIPA
ASC), pages 1201–1206.
Marschall, J., Hildebrandt, S., Zich, K., Tisch, T., S
¨
orensen,
J., and Nolting, H.-D. (2018). Gesundheitsreport
2018. beitr
¨
age zur gesundheits
¨
okonomie und ver-
sorgungsforschung (band 21). https://www.dak.de/
dak/download/gesundheitsreport-2108884.pdf. page
134.
Mattiuzzi, C., Lippi, G., and Bovo, C. (2020). Current epi-
demiology of low back pain. JJournal of Hospital
Management and Health Policy, 4.
Microsoft Inc. (2020). About Azure Kinect DK — Mi-
crosoft Docs.
Microsoft Inc. (2021). Azure kinect dk hardware specifica-
tions.
Olaogun, M. O., Adedoyin, R. A., Ikem, I. C., and Ani-
faloba, O. R. (2004). Reliability of rating low back
pain with a visual analogue scale and a semantic dif-
ferential scale. Physiotherapy theory and practice,
20(2):135–142.
Perret, C., Poiraudeau, S., Fermanian, J., Colau, M. M. L.,
Benhamou, M. A. M., and Revel, M. (2001). Validity,
reliability, and responsiveness of the fingertip-to-floor
test. Archives of physical medicine and rehabilitation,
82(11):1566–1570.
Rector, K., Bennett, C. L., and Kientz, J. A. (2013). Eyes-
free yoga: An exergame using depth cameras for blind
& low vision exercise. In Proceedings of the 15th
International ACM SIGACCESS Conference on Com-
puters and Accessibility, ASSETS ’13, New York, NY,
USA. Association for Computing Machinery.
Saß, A.-C., Lampert, T., Pr
¨
utz, F., Seeling, S., Starker,
A., Kroll, L. E., Rommel, A., Ryl, L., and Ziese,
T. (2015). Gesundheit in deutschland. gesundheits-
berichterstattung des bundes. gemeinsam getragen
von rki und destatis. page 69.
Schmidt, C. O., Raspe, H., Pfingsten, M., Hasenbring, M.,
Basler, H. D., Eich, W., and Kohlmann, T. (2007).
Back pain in the german adult population: prevalence,
severity, and sociodemographic correlates in a multi-
regional survey. Spine, 32(18):2005–2011.
statista (2022). Percentage of u.s. respondents that were
prescribed select treatments for their back pain as of
2017, by age.
Thar, M. C., Winn, K. Z. N., and Funabiki, N. (2019).
A proposal of yoga pose assessment method using
pose detection for self-learning. In 2019 International
Conference on Advanced Information Technologies
(ICAIT), pages 137–142.
T
¨
olgyessy, M., Dekan, M., Chovanec, L., and Hubinsk
´
y, P.
(2021). Evaluation of the azure kinect and its compar-
ison to kinect v1 and kinect v2. Sensors, 21(2).
von der Lippe, E., Krause, L., Porst, M., Wengler, A.,
Leddin, J., M
¨
uller, A., Zeisler, M.-L., Anton, A.,
Rommel, A., and study group, B. . (2021). Jour-
nal of health monitoring. pr
¨
avalenz von r
¨
ucken-
und nackenschmerzen in deutschland. ergebnisse der
krankheitslast- studie burden 2020.
Wang, J., Qiu, K., Peng, H., Fu, J., and Zhu, J. (2019).
Ai coach: Deep human pose estimation and analysis
for personalized athletic training assistance. In Pro-
ceedings of the 27th ACM International Conference
on Multimedia, MM ’19, page 2228–2230, New York,
NY, USA. Association for Computing Machinery.
Yang, L., Ren, Y., Hu, H., and Tian, B. (2015). New fast
fall detection method based on spatio-temporal con-
text tracking of head by using depth images. Sensors,
15(9):23004–23019.
Ye, M., Wang, X., Yang, R., Ren, L., and Pollefeys, M.
(2011). Accurate 3d pose estimation from a single
depth image. In 2011 International Conference on
Computer Vision, pages 731–738.
Zhou, Z., Tsubouchi, Y., and Yatani, K. (2019). Visualiz-
ing out-of-synchronization in group dancing. In The
Adjunct Publication of the 32nd Annual ACM Sym-
posium on User Interface Software and Technology,
UIST ’19, page 107–109, New York, NY, USA. Asso-
ciation for Computing Machinery.
HEALTHINF 2023 - 16th International Conference on Health Informatics
496
