
Towards User-Centred Validation and Calibration of Agent-Based
Models
Etienne Tack
1,2 a
, Gilles
´
En
´
ee
2 b
, Thomas Gaillard
3
, Jean-Marie Fotsing
2
and Fr
´
ed
´
eric Flouvat
4 c
1
INSIGHT, Noumea, New-Caledonia
2
Institute of Exact and Applied Sciences (ISEA), University of New Caledonia (UNC), Noumea, New-Caledonia
3
Ecosophy, Noumea, New-Caledonia
4
Aix Marseille Univ, CNRS, LIS, Marseille, France
fl
Keywords:
Agent-Based Modelling, Validation, Calibration, User-Centred.
Abstract:
This paper describes a path to a user-centred approach for calibration and validation of agent-based models,
particularly for spatially explicit models. Including the end-user in these critic modelling steps, we hope for
better models that converge more easily toward reality. Using experts’ knowledge, validation measures and
feedback links to model parameters can be established. However, experts are not necessarily proficient in
computer science. Tools should be created to help the transmission of their knowledge. With this paper,
complying with a user-centred approach, we suggest using user-defined validation measures and a visual
programming language to let the experts adjust themselves the behaviour rules of the agents.
1 INTRODUCTION
Multi-Agent Systems (MAS) are used to model dy-
namic systems and their environment. In contrast to
a centralised artificial intelligence approach, MAS—
also called agent-based models—are a decentralised
“bottom-up” approach that allow modellers to solve
problems by splitting knowledge and complexity into
multiple entities called agents. An agent is an entity
representing an object that evolves in an environment
and can interact with it and other agents to perform
any kind of tasks following behaviour rules (Ferber,
1999; Wooldridge and Jennings, 1995). Thus, the
main objectives of MAS, among others, are to bring
out a collective intelligence resulting of a sum of indi-
vidual interactions, and to study the dynamics of com-
plex systems which sometimes seem chaotic. Using
such tools, modellers are able to do hypothesis and
confirm them through simulation by analysing the re-
sults. The multi-agent model is not necessarily the
end, sometimes it just helps to understand and find an
easier way to model the studied subject.
MAS is not only a data driven approach, data can
be used but is not mandatory. However, MAS is in
a
https://orcid.org/0000-0003-4131-1449
b
https://orcid.org/0000-0002-0140-5291
c
https://orcid.org/0000-0001-7288-0498
practice a user-driven approach. The place of users
in the agent based modelling is often very important.
Definition of agents and interactions are mainly done
by experts. One of the most difficult points here is
the definition of agents’ behaviour rules. The ex-
perts have a global knowledge of the different objects
(agents or environment) that model the system. How-
ever, it is much more difficult for them to finely de-
fine their interactions, and the rules that govern them.
Definition of these rules are done iteratively by ex-
perts based on results of many simulations, which is
time-consuming and complex. The user requires be-
ing able to clearly identify missing or incorrect rules
and, more generally, to evaluate whether a simulation
result is correct or not. It is not trivial as it may depend
on several factors as well as the users. Moreover, the
objective of a simulation is generally not to have an
exact projection of the behaviour of a system, but to
have a realistic projection of it. Even if data exists, it
is therefore not enough to compare it to simulation re-
sults. It is necessary to identify features which make
it possible to check more generally the plausibility of
the simulation in relation to data, and measure it. In
such a modelling process, validation and calibration
are thus closely linked to each other, and to the user.
For example, a typical application of MAS is ur-
ban growth simulation (Jokar Arsanjani et al., 2013;
322
Tack, E., Énée, G., Gaillard, T., Fotsing, J. and Flouvat, F.
Towards User-Centred Validation and Calibration of Agent-Based Models.
DOI: 10.5220/0011750000003393
In Proceedings of the 15th International Conference on Agents and Artificial Intelligence (ICAART 2023) - Volume 1, pages 322-329
ISBN: 978-989-758-623-1; ISSN: 2184-433X
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

Gonz
´
alez-M
´
endez et al., 2021). The main objective is
to model development of a city, through construction,
modification and destruction of its buildings. Agents
can be people, households or builders. The environ-
ment is spatially explicit and constructed from GIS
data (Geographic Information System). It can include
road networks, transportation networks, and ameni-
ties (e.g. schools, supermarkets, hospitals, police sta-
tions). Agents modify, construct or destruct buildings
according to behaviour rules specified by a special-
ist in urban planning. Experts know some of these
rules, but defining finely these rules, their parame-
ters and triggering thresholds is not trivial. For ex-
ample, building supermarkets may depend on popula-
tion density in a district, but it is not easy to identify
the corresponding threshold (and location). More-
over, experts may miss some of them, and they may
not know some others, such as implicit rules linked to
socio-cultural considerations. Identifying and tweak-
ing these behaviours rules is difficult. Experts need
methods and tools to help them identify, fine-tune and
validate their rules iteratively.
In this paper, we first present and discuss differ-
ent methodologies for MAS modelling. We show that
these approaches offer a general framework, but their
integration of validation and calibration remains lim-
ited. Next, we present a user-centred view of this
validation and calibration process, and illustrate our
proposition on a use case dealing with a spatial ex-
plicit model. Finally, we summarise the benefits of
our propositions for the MAS community.
2 METHODOLOGY FOR MAS
MODELLING
Agent-based models involve a lot of inputs (e.g. data,
expert knowledge, . . . ) and processes (e.g. agents be-
haviour rules, environment definition, . . . ). A clear
modelling approach is required for the reproducibil-
ity of agent-based experiments, especially for spa-
tially explicit models aiming to reproduce human be-
haviours.
To facilitate the definition of agent based systems,
the MAS research community has proposed several
methodologies. The last methodology developed by
the community is ODD (Overview / Design Concepts
/ Details) (Grimm et al., 2006, 2010). It is a descrip-
tive framework which has been adopted as a protocol
to describe and share agent-based models.
2.1 ODD: A Protocol to Standardise
Model Definition
Before ODD, model descriptions were often hard to
read and incomplete (Grimm et al., 2006). ODD offer
a structure to help modellers not to forget anything
that can be useful when reimplementing an agent-
based model. Reimplementation is facilitated by a
more transparent description of the model, therefore
the results can be reproduced by peers more easily.
In the ODD acronym, the “O” stands for
“Overview”. This section covers general information
about the model (purpose, state variables and scales,
process overview and scheduling). As mentioned
in (Grimm et al., 2006), “after reading the overview it
should be possible to write, in an object-oriented pro-
gramming language, the skeleton of a program that
implements the described model”.
The first “D” is for “Design Concepts”. It is a
description of the general concepts of the model. It
covers agents’ interactions: whether the agents should
take into account the future states of the model in their
reasoning, the emergence of collective dynamics re-
sulting from local interactions, and the stochasticity
of the model.
Finally, the last section—“Details”—describes the
initialisation of the model, the required input data and
the submodels (e.g. weather, expert models, . . . ).
Depending on the kind of model that needs to be
described, ODD can still be insufficient, especially
when human behaviour is involved. ODD+D (M
¨
uller
et al., 2013) is an extension of ODD that focuses
on human decision-making aspects. It has the
same structure, but “adaptations were created to al-
low the protocol to be extended to human decision-
making” (Crooks, 2018). Changes are located in the
design concept category and implementation details
(c.f. grey boxes in Figure 1). For further details,
Crooks (2018) suggest seeing examples of the imple-
mentation of this protocol in Pires and Crooks (2017)
and Orsi and Geneletti (6 11).
2.2 Validation and Calibration
The purpose of validation is to measure the distance
between reality and simulations results. For simula-
tion models, whose aiming to reproduce the reality,
results needs to be validated. As shown in Figure 2,
the model generates data through simulation. This
data is compared to the observed data, and an error
(“fitness” or distance) is calculated. If the model is
not good enough, this information is used to adjust
the model parameters (e.g. submodels’ parameters or
agents’ rules), and run the same loop again. It is the
Towards User-Centred Validation and Calibration of Agent-Based Models
323
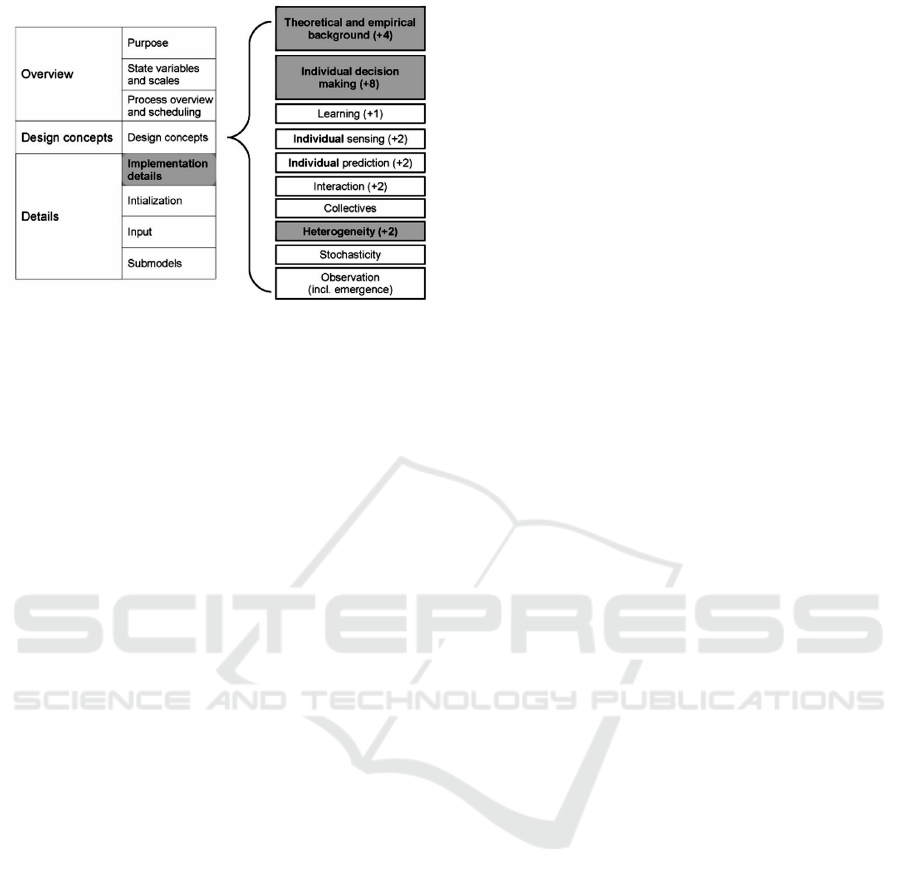
Figure 1: The structure of the ODD+D protocol. Grey
boxes indicate new elements compared to the ODD pro-
tocol, and the number in brackets shows the added ques-
tions (M
¨
uller et al., 2013).
calibration step.
The first question that comes in such pro-
cess (fig. 2) is: what do we rely on for calibration?
Wilensky and Rand (2015) talk about “microvalida-
tion” when the calibration is done on the agent at-
tributes individually and “macrovalidation” when it is
done by analysing the global dynamics of the system.
However, the model can be overfitted, i.e. it is
too specialised to the observed data. Such as in
classification approaches, the solution is to split the
observation data into two datasets: one for calibra-
tion (training data) and the other for validation (val-
idation data). Usually the partitions’ distribution is
between 75%/25% and 80%/20% (respectively for
training/validation). If the observed dataset is small,
Crooks (2018) suggest to use cross-validation, which
train and test the model multiple times using random
train and test partitions. However, it is not always
possible in a user-centred approach because it is par-
ticularly time-consuming for the experts. The experts
could help, correcting the model when the data is not
covering local minima, but such interventions must
remain highly targeted.
Calibration of a model based on natural processes
or human behaviour can be tricky. It depends on lots
of explicit and implicit parameters that are in interac-
tion. These parameters may have lots of possible val-
ues, and even an infinite number of values for some.
Therefore, the parameter search space can be very
colossal.
Crooks (2018) introduces two kinds of calibra-
tion: “qualitative”and ‘quantitative”. On the one
hand, with a “qualitative” calibration, the model is
adjusted until it looks correct for the modeller (i.e.
“face-validation”). Statistics and measures can be
computed to help the modeller in this process (i.e. if
the measurements are accurate. Then, the model is
also suspected to be accurate).
On the other hand, with a “quantitative” calibra-
tion, the model is adjusted using measures that quan-
tify the gap between simulation and reality. Railsback
and Grimm (2019) define a methodology for quanti-
tative calibration with the following steps:
1. Choose a few uncertain and important parameters.
2. Choose what kind of solution is wanted, a range
of potential solutions, or an optimum value.
3. If time is important in the model, use a measure
that integrates differences over time (e.g. mean
difference, maximum error, RMSE, . . . ).
4. Choose calibration patterns based on which obser-
vation data exist.
5. Explore the model’s parameter search space to
find a satisfactory solution (detail below).
6. Analyse the calibration results, and identify the
solution that best represent the reality.
Within this calibration methodology, the authors
recommend several technical solutions. They suggest
exploring the parameter search space, i.e. generate all
parameter combinations until the difference with ob-
servation data is small enough (statistics, model er-
ror evaluation, . . . ). A sensitivity analysis can also
be done for the more sensitive parameters (i.e. the pa-
rameters that influence the most in the model). Its
function is to operate several simulations and to ob-
serve the outcomes of the simulations while changing
the values of the parameters. It is usually applied with
a “one factor at a time” approach. Sensitivity anal-
ysis is the most widely used method for testing the
stability of a simulation (Crooks, 2018). An uncer-
tainty analysis can also be useful as well. In such ap-
proach, the model is executed many times (e.g. 1000
runs) to construct a frequency distribution of simu-
lation output measures. These distributions enable to
capture variation in simulation results for each param-
eter. Next, they are compared to probability distribu-
tions (i.e. Gaussian, log-normal, . . . ) constructed us-
ing the means and standard deviations of the observed
data. Finally, Railsback and Grimm (2019) also sug-
gest using a heuristic search. This approach has the
same objective as parameter space search, but instead
of exploring all possibilities, it uses a heuristic to re-
duce the search space (s.t. genetic algorithms (Reuil-
lon et al., 2013), gradient descent or gradient climb-
ing, reinforcement learning, . . . ).
Hence, the whole process of validation and cal-
ibration is not trivial. Whatever is the method fol-
lowed, the experts involved in the calibration process
need simplified interactions and semi-automation to
raise parameters leading to an invalid model.
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
324
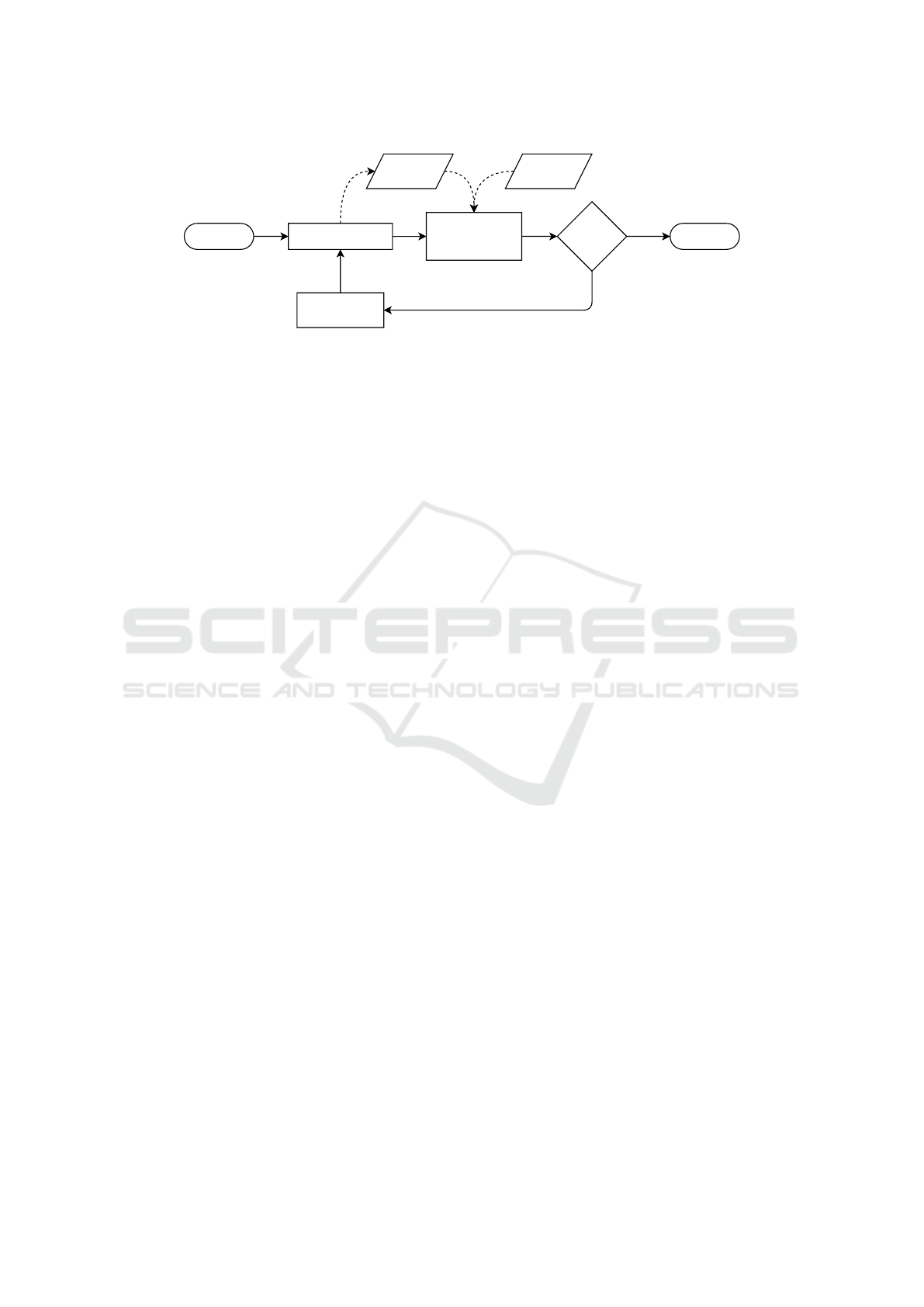
Compare Data and
Calculate Error
(aka Fitness)
Start Stop
Simulated
Data
Generate
Data
Run Model
Adjust model
No
Yes
Error
sufficiently
low?
Observed
Data
Figure 2: The process of validation and calibration (Crooks, 2018).
2.3 Limitation of Current
Methodologies
Although ODD and its extensions allow a clear struc-
ture, it is not yet universally used. For some complex
models, the protocol is time-consuming or too restric-
tive to write (Crooks, 2018). In addition, it does not
frame the details about calibration, validation and de-
scription of the agent behaviour rules, even though it
requires a description for these. This limit leads to
a more difficult calibration and validation, especially
for complex and innovative models. The lack of cali-
bration and validation approaches is still an open issue
for agent-based models (Lee et al., 2015; Heppenstall
et al., 2021).
Currently, calibration and validation solutions are
chosen on a case-by-case basis, as these steps heavily
require experts of the domain. Moreover, domain ex-
perts are not necessarily proficient to code the rules
themselves, this can limit the explainability of the
model, and thus, make the implementation of a multi-
agent model more complicated. A more user-centred
approach is needed.
3 USER-CENTRED VALIDATION
AND CALIBRATION
In a multidisciplinary context, experts from many sci-
entific domains (e.g. computer science, geography,
sociology, . . . ) have to collaborate together to model a
system. Thus, the models, rules and methods must be
understandable by all so that the results are accepted,
especially for non-computer scientists which are the
users (i.e. field experts). It is the acceptability prob-
lem that is at the centre of many works lately.
In this context, we propose a user-centred view of
calibration and validation, as these are the modelling
phases that require the most knowledge from field ex-
perts. We believe that by involving more of the ex-
perts in these steps, the acceptability and the explain-
ability of results will be improved.
To do this, we propose to integrate more the ex-
perts in the definition of the validation measures, and
in the calibration of the behaviour rules, in relation
with these measures. We illustrate this on an appli-
cation related to urban growth, i.e. spatially explicit
measures to evaluate multi-agents simulations in a
GIS context. The agents are representing physically
existing geographical objects (buildings) and have a
shape that may evolve over time.
3.1 User-Defined Validation Measures
For each application, the experts identify a list of do-
main specific measures that will be used to validate
the model. These measures are used to evaluate the
distance between simulation and reality. Several vali-
dation measures may be identified, and combined, to
provide an overview of the realism of the simulation.
If field data is available, these measures can be used
to process a distance between simulation results and
real data.
In our case study related to urban growth simula-
tion, these measures must describe the buildings gen-
erated by the model. They can be compared to real
buildings observed in satellite images, for example.
The table 1 lists several spatial measures identified by
our expert (a geographer). The table 2 shows whether
these measures can be applied at a micro-level (e.g.
morphological measures applied for each individual
objects) or at a macro-level (i.e. the whole area). Note
that micro-level measures are aggregated to generate
macro-level indicators (e.g. by averaging).
Most of these measures are processed for each ob-
ject individually first. Only the Hausdorff distance
and the Kernel density difference require considering
several objects. The Hausdorff distance evaluates the
distance between two building shapes. It can be used
to measure the minimum distance between a build-
ing and its neighbours. It can also be aggregated to
evaluate more globally the distances between build-
ings (using the mean, the average, etc.). The Kernel
Towards User-Centred Validation and Calibration of Agent-Based Models
325
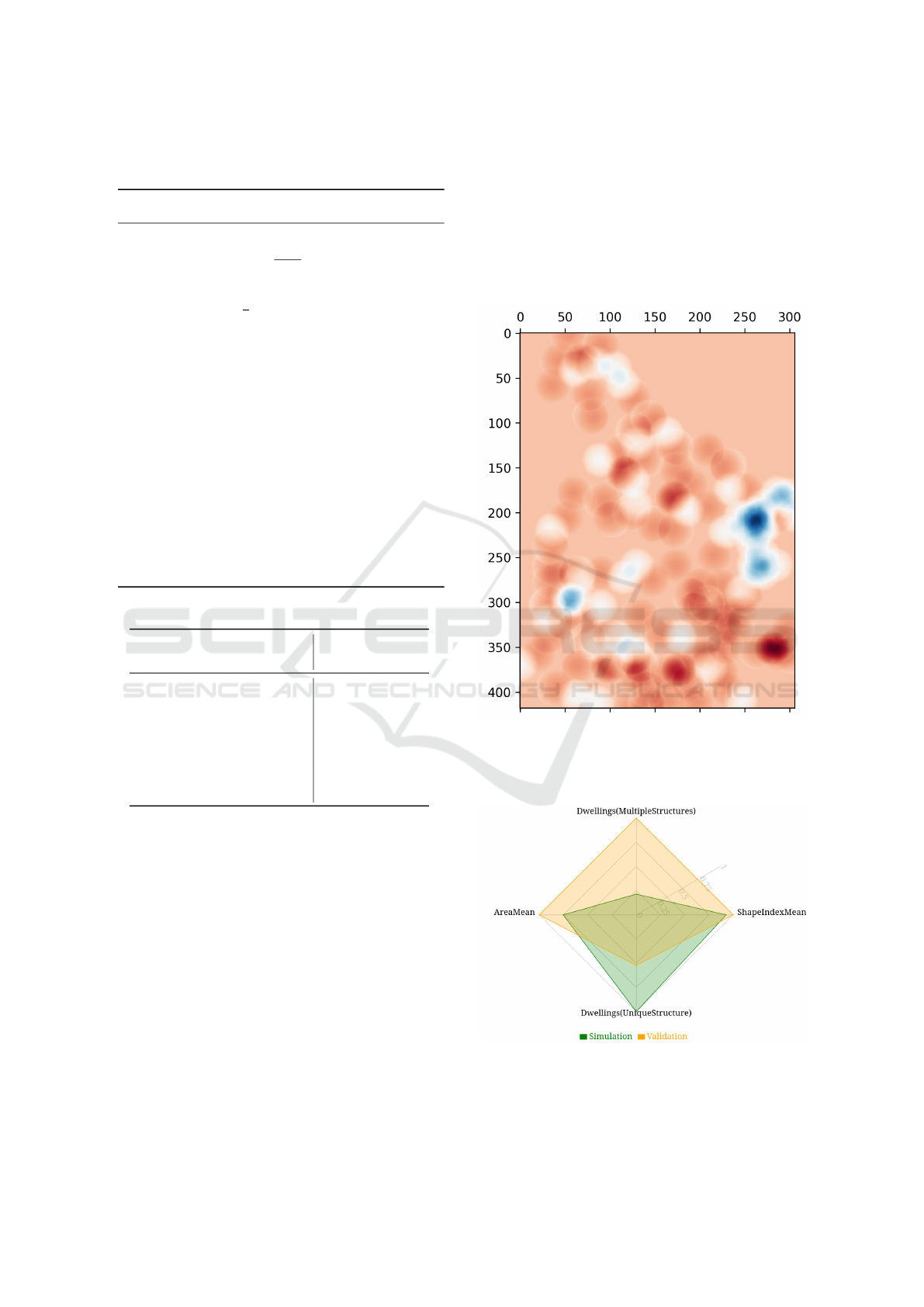
Table 1: Example of spatial validation measures defined by
an expert for urban growth simulation.
Measure Detail
Surface area Let a the area of a polygon
Shape index p/(2 ∗
√
a ∗π) with p the perimeter
of a polygon
Morton
index
a/(
π
2
∗ max
d∈D
d
2
) with D the set of
all the possible diagonal lengths of
a polygon
Perimeter to
surface ratio
p/a
Number of
objects
“Explicit”
Hausdorff
Distance
d
∞
(C,D) := sup
x∈R
n
|d
C
(x)−d
D
(x)|,
with two object shapes C,D ⊂ R
n
closed and non-empty (Rockafellar
and Wets, 2009)
Kernel
Density
Difference
Difference of the kernel density of
the generated data against the vali-
dation data (fig. 3)
Table 2: Validation Measures Levels.
Measure
Level
Micro Macro
Surface area X ⋆
Shape index X ⋆
Morton index X ⋆
Perimeter to surface ratio X ⋆
Number of objects X
Hausdorff distance X
Kernel density difference X
⋆ Aggregations (i.e. mean value, standard deviation, minimum
and maximum values, distribution by value, . . . )
density is also processed at a macro-level, and enables
to generate a density map (heat map). It evaluates the
density of buildings in the studied area. All these in-
dicators can be processed on simulated buildings and
buildings extracted from images using remote sens-
ing. If images are available, it is thus possible to mea-
sure the differences between the simulation and real-
ity, and this for each simulation step for which data
is available. This enables experts to study simulated
buildings from different points of view. Generally,
this analysis is done at a macro-level by experts.
These results must be presented to experts in user-
friendly and customisable dashboards. For example,
the Figure 3 illustrates a visualisation of the kernel
density difference. It is obtained by subtracting be-
tween the kernel density map of simulated buildings
and the one obtained from field data. It is important
to let the experts customise their indicators and charts.
The developed tool must therefore allow the expert to
build dashboards intuitively. It is also important to
provide experts a global view of all these indicators.
For this, we use for example a “spider” chart for its
simplicity (see Figure 4).
Figure 3: Kernel Density Difference (red areas represent a
lack of buildings in the simulation and blue areas shows the
contrary). Here is an example for our first case study, an
informal settlement situated in Fiji.
Figure 4: Comparative “Spider” Chart (values are nor-
malised for better visualisation, which can be disabled).
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
326
Beside GIS-centred measures, the experts must be
able also to follow other non-spatial measures such as
measures based on socio-economic variables, utility
function values, behavioural rule triggering history,
interactions history, . . .
3.2 An Intuitive and Guided Visual
Calibration
By giving the appropriate validation information to
the expert, the goal is to help him make the model
converge towards reality. Based on the validation
dashboards, the expert can explore the parameter
space. He can modify certain parameters of the sub-
models and adjust the agents’ behaviours, while grad-
ually checking that the results of the simulation con-
verge.
As mentioned before, a difficult point in agent
based modelling is the calibration of the behaviour
rules of agents. Even if validation information is pro-
vided, it can be time-consuming to identify and ad-
just, at each execution, the rules that need to be mod-
ified. To deal with this problem, we suggest identi-
fying and store the links between validation measures
and agents’ rules, when defining the validation mea-
sures.
Experts define behaviour rules when modelling.
They know their impact on the simulation (at least
locally). For example, they know that some agent
rules create buildings and that others extend build-
ings. Thus, they can store this information when
defining validation measures. Once these links have
been stored at design time, it is easy at runtime to dis-
play in the validation dashboards the rules impacted
by specific measures. Thus, the experts can directly
adjust the right rules when they identify in the dash-
boards an indicator that is too far from reality.
Going further in the implication of the user, it is
important to provide an intuitive, and sufficiently rich,
language to describe the behaviour rules of the agents.
A visual language like scratch, which is designed to
teach children coding, can be a solution for experts to
be more autonomous in the calibration process. For
example, such an approach has been followed in the
RePast platform, through the Repast Simphony Stat-
echarts (Ozik et al., 2015). However, it is not a full
programming language. It is just a finite state ma-
chine that can set agent’s statuses, and thus trigger
behaviours written in others languages (e.g. ReLogo,
Java, . . . ).
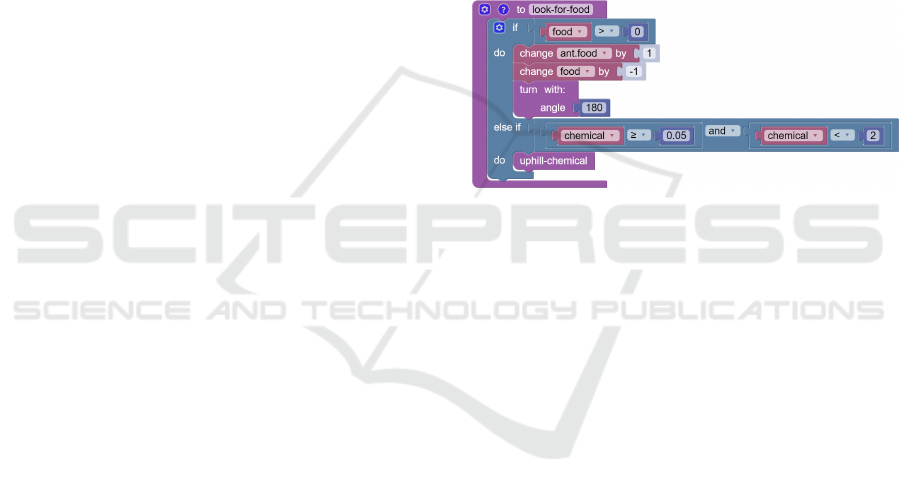
Two types of visual programming do exist. In-
structions can either be represented with blocks (like
Scratch) or with nodes in a graphical representation
(like flowcharts in node programming languages). For
example, Figure 5 illustrates a behaviour rule “look
for food” described in the NetLogo language to sim-
ulate ant foraging (Wilensky, 1997). The same rule is
translated in the Scratch language in Figure 6.
to look-for-food ;; turtle procedure
if food > 0
[ set color organge + 1 ;; pick up food
set food food - 1 ;; reduce food source
rt 180 ;; and turn around
stop ]
;; go in the direction where the chemical
;; smell is strongest
if (chemical >= 0.05) and (chemical < 2)
[ uphill-chemical ]
end
Figure 5: NetLogo code for the “look for food” procedure
Wilensky (1997).
Figure 6: The “look for food” procedure written with a
visual programming language (for instance, Blockly which
has more or less the same functionalities as Scratch).
Of course, such manual modification of behaviour
rules still time-consuming and difficult. To alleviate
this, it is possible to use machine learning approaches.
For example, genetic algorithms have been used at
the model level to set parameter thresholds (Reuil-
lon et al., 2013). Reinforcement learning have also
been used a lot in MAS (Bus¸oniu et al., 2010; Zhang
et al., 2019). They are used to finding good param-
eters for submodels, or to build a behaviour model
for agents. However, a problem of such approach is
the interpretability of the generated model. It is far
from behaviour rules defined by experts (which are
often “if . . . then . . . else” rules). Another problem for
some applications is the quantity and the quality of
available field data used to train algorithms. For ex-
ample, methods based on deep learning need a lot of
data (and are black boxes for experts). In any case,
even if learning algorithms are used, the expert must
be fully integrated into the calibration process to guar-
antee the acceptability of the results. He must be able
to understand the generated models and to guide the
learning algorithms thanks to his domain knowledge.
This is an important challenge for future agent learn-
ing methods.
Towards User-Centred Validation and Calibration of Agent-Based Models
327

4 CONCLUSIONS
In this paper, we present a user-centred approach
for calibration and validation of agent-based models.
By including the end user in most of the modelling
phases, especially calibration and validation, we are
hoping for better explainability of simulation results
and a smoother transmission of expert knowledge.
We illustrate this position with an application dealing
with urban growth. Such an application involves com-
plex, spatially explicit models of human behaviour,
and experts who have some knowledge of the under-
lying mechanisms, but who want interpretable models
and acceptable results.
In order to achieve this goal, we think it is impor-
tant to involve more the experts in the model design.
They must be able to define behaviour rules them-
selves using a visual programming language. They
must also be able to define their validation measures
and to navigate easily between behaviour rules and
validation results. Machine learning methods can
help to automate and simplifying the calibration pro-
cess, but chosen methods must produce interpretable
models, such that experts can trust simulation results.
We are currently implementing such an approach with
a geographer in the setting of informal settlement
growth modelling (e.g. slums), and the first results
are very encouraging.
ACKNOWLEDGEMENTS
We specifically thank the University of South-Pacific
(USP) for participating in data acquisition for an in-
formal settlement in Fiji.
This work was financed by the Pacific Islands Uni-
versities Research Network (PIURN) and the French
Ministry for Foreign Affairs (Pacific Fund). It is now
supported by the French National Research Agency
(ANR SITI project).
REFERENCES
Bus¸oniu, L., Babu
ˇ
ska, R., and Schutter, B. D. (2010). Multi-
agent reinforcement learning: An overview. In Inno-
vations in Multi-Agent Systems and Applications - 1,
pages 183–221. Springer Berlin Heidelberg.
Crooks, A. (2018). Agent-Based Modelling and Geograph-
ical Information Systems: A Practical Primer. Spatial
Analysis and GIS. SAGE Publications.
Ferber, J. (1999). Multi-Agent Systems : An Introduction
to Distributed Artificial Intelligence. Addison Wesley
Longman.
Gonz
´
alez-M
´
endez, M., Olaya, C., Fasolino, I., Grimaldi,
M., and Obreg
´
on, N. (2021). Agent-Based Model-
ing for Urban Development Planning based on Hu-
man Needs. Conceptual Basis and Model Formula-
tion. Land Use Policy, 101:105110.
Grimm, V., Berger, U., Bastiansen, F., Eliassen, S., Ginot,
V., Giske, J., Goss-Custard, J., Grand, T., Heinz, S. K.,
Huse, G., Huth, A., Jepsen, J. U., Jørgensen, C.,
Mooij, W. M., M
¨
uller, B., Pe’er, G., Piou, C., Rails-
back, S. F., Robbins, A. M., Robbins, M. M., Ross-
manith, E., R
¨
uger, N., Strand, E., Souissi, S., Still-
man, R. A., Vabø, R., Visser, U., and DeAngelis, D. L.
(2006). A standard protocol for describing individual-
based and agent-based models. Ecological Modelling,
198(1-2):115–126.
Grimm, V., Berger, U., DeAngelis, D. L., Polhill, J. G.,
Giske, J., and Railsback, S. F. (2010). The ODD pro-
tocol: A review and first update. Ecological Mod-
elling, 221(23):2760–2768.
Heppenstall, A., Crooks, A., Malleson, N., Manley, E., Ge,
J., and Batty, M. (2021). Future Developments in Ge-
ographical Agent-Based Models: Challenges and Op-
portunities. Geographical Analysis, 53(1):76–91.
Jokar Arsanjani, J., Helbich, M., and de Noronha Vaz, E.
(2013). Spatiotemporal simulation of urban growth
patterns using agent-based modeling: The case of
Tehran. Cities, 32:33–42.
Lee, J.-S., Filatova, T., Ligmann-Zielinska, A., Hassani-
Mahmooei, B., Stonedahl, F., Lorscheid, I., Voinov,
A., Polhill, G., Sun, Z., and Parker, D. C. (2015). The
Complexities of Agent-Based Modeling Output Anal-
ysis. Journal of Artificial Societies and Social Simu-
lation, 18(4):4.
M
¨
uller, B., Bohn, F., Dreßler, G., Groeneveld, J., Klassert,
C., Martin, R., Schl
¨
uter, M., Schulze, J., Weise, H.,
and Schwarz, N. (2013). Describing human decisions
in agent-based models – ODD + D, an extension of the
ODD protocol. Environmental Modelling & Software,
48:37–48.
Orsi, F. and Geneletti, D. (2016-11). Transportation as
a protected area management tool: An agent-based
model to assess the effect of travel mode choices on
hiker movements. Computers, Environment and Ur-
ban Systems, 60:12–22.
Ozik, J., Collier, N., Combs, T., Macal, C. M., and North,
M. (2015). Repast simphony statecharts. Journal of
Artificial Societies and Social Simulation, 18(3).
Pires, B. and Crooks, A. T. (2017). Modeling the emergence
of riots: A geosimulation approach. Computers, Envi-
ronment and Urban Systems, 61:66–80.
Railsback, S. F. and Grimm, V. (2019). Agent-Based and
Individual-Based Modeling A Practical Introduction,
Second Edition. Princeton University Press.
Reuillon, R., Leclaire, M., and Rey-Coyrehourcq, S.
(2013). OpenMOLE, a workflow engine specifi-
cally tailored for the distributed exploration of simu-
lation models. Future Generation Computer Systems,
29(8):1981–1990.
Rockafellar, R. T. and Wets, R. J.-B. (2009). Variational
Analysis. Springer Science & Business Media.
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
328

Wilensky, U. (1997). NetLogo Ants model. http://ccl.
northwestern.edu/netlogo/models/Ants. [Center for
Connected Learning and Computer-Based Modeling,
Northwestern University, Evanston, IL].
Wilensky, U. and Rand, W. (2015). An Introduction to
Agent-Based Modeling: Modeling Natural, Social,
and Engineered Complex Systems with NetLogo. The
MIT Press.
Wooldridge, M. and Jennings, N. R. (1995). Intelligent
agents: Theory and practice. The Knowledge Engi-
neering Review, 10(2):115–152.
Zhang, K., Yang, Z., and Bas¸ar, T. (2019). Multi-agent rein-
forcement learning: A selective overview of theories
and algorithms. Handbook of Reinforcement Learning
and Control, pages 321–384.
Towards User-Centred Validation and Calibration of Agent-Based Models
329
