
A Novel 3D Face Reconstruction Model from a Multi-Image 2D Set
Mohamed Dhouioui
1,*
, Tarek Frikha
1
, Hassen Drira
2
and Mohamed Abid
1
1
CES-Lab, ENIS, University of Sfax, Sfax, Tunisia
2
Centre e Recherche en Informatique Signal et Automatique de Lille, IMT Lille Douai University, Lille, France
Keywords: Facial Reconstruction, 3D Morphable Model, 3D Face Imaging, Multi-Image 3D Reconstruction,
Single-Image 3D Reconstruction.
Abstract: Recently, many researchers have focused on 3D face analysis and its applications, and put a lot of work on
developing its methods. Even though 3D facial images provide a better representation of the face in terms of
accuracy, they are harder to acquire than 2D pictures. This is why, wide efforts have been put to develop
systems which reconstruct 3D face models from 2D images. However, the 2D to 3D face reconstruction
problem is still not very advanced, it is both computationally intensive and needs great space exploration to
acquire accurate representations. In this paper, we present a 3D multi-image face reconstruction method built
over a single image reconstruction model. We propose a novel 3D face re-construction approach based on
two levels, first, the use of a single image 3d re-construction CNN model to represent vectorial embeddings
and generate a 3d Face morphable model. And second, an unsupervised K-means model on top of the single
image reconstruction CNN Model to optimize its results by incorporating a multi-image reconstruction.
Thanks to the introduction of a hybrid loss function, we are able to train the model without ground truth
reference. Further-more, to our knowledge this is the first use of an unsupervised model alongside a weakly
supervised one reaching such performance. Experiments show that our approach outperforms its counterparts
in the literature both in single-image and multi-image reconstruction, and it proves that its unique and original
nature are very promising to implement in other applications.
1 INTRODUCTION
Facial analysis is widely used in many different
applications, we could cite for example interactions
between humans and computers (Zhang et al., 2013),
security applications (Kaplan et al., 2015), (Burton et
al., 1999), motion pictures (Weise et al., 2011),
(Weise et al., 2009), and health (EL Rai et al., 2015),
(Suttie et al., 2013). In recent years, incorporating 3D
data is becoming a trend to surpass some of the
inherent issues of the vastly studied 2D facial
analysis. A 2D image is insufficient to precisely
represent the geometry and full data of a face due to
its 3D nature, since it collapses one of the dimensions.
Moreover, 3D imaging yields a representation of the
facial shape that preserves more or less illumination
and pose, two of the primary drawbacks of 2D
imaging. As a result, the benefits provided by 3d face
recognition techniques come at the expense of a more
sophisticated imaging procedure., which is more
demanding in data collection and exploration. Some
of the well-known techniques for 3D facial
information acquisition is stereo-vision systems
(Alexander et al., 2010), (Beeler et al., 2011), 3D
laser scanners (Lee et al., 1995) (e.g. NextEngine and
Cyberware), and RGB-D cameras (such as Kinect).
But, each of the mentioned tech-niques has its own
drawbacks. Stereo-vision and laser take precise facial
scanning, but need controlled settings and costly
equipment. As opposed to RGB-D cameras which are
cheaper and easier to use, but provide scans with
limited quality (Yang et al., 2015).
Researchers propose a substitute approach to
acquiring 3D facial scans, they propose to predict its
shape from an uncalibrated image (Booth et al.,
2018), (Guo et al., 2019). This approach to recon-
struct 3D models from 2D images aims to incorporate
the ease of 2D picture capture with the advantages of
representing the face in a 3D geometry. Despite its
attractive-ness, it is inherently ill posed: each and
every one of the individual facial geometries, The
head's position and texture (including lighting and
color) must be retrieved from a single image., which
leads to a much more complex problem. As a
consequence, and due to the difficulty in determining
Dhouioui, M., Frikha, T., Drira, H. and Abid, M.
A Novel 3D Face Reconstruction Model from a Multi-Image 2D Set.
DOI: 10.5220/0011749500003417
In Proceedings of the 18th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2023) - Volume 5: VISAPP, pages
745-753
ISBN: 978-989-758-634-7; ISSN: 2184-4321
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
745

which of several 3D faces that make up a single 2D
image is the one that best represents the underlying
geometry, there may be ambiguities in the solution of
the 3D from 2D face reconstruction. Recent research
progress has helped to achieve remarkably
convincing reconstructions based on newly proposed
methodologies, enabling 3D from 2D face
reconstruction to be used for number of disciplines
(Tu et al., 2019), (Zhu et al., 2019).
The use of past information to resolve ambiguities
in the solutions is critical to assure best conditions for
3d from 2d reconstruction approaches. Through
literature we could identify in the last decade three
techniques for incorporating this previous
knowledge: statistical model fitting, photometric
stereo, and Deep learning.
A starting method builds a 3D facial model from
a set of 3D facial scans, and then encoded prior
knowledge into it which is later fitted to the input
images.
In another method, they often combine data from
many photos, which therefore adds to the complexity.
The facial surface normals are estimated using
photometric stereo methods in conjunction with 3D
face template or 3D facial models.
In the third approach, the 2D to 3D
correspondence is implemented using neural net-
work models. Given adequate training images, these
networks can understand the descriptors required to
connect the shape and look of faces.
2 RELATED WORKS
As stated earlier in the introduction deep learning
techniques encode past information in the trained
network's weights and effectively understand
mappings between the 2D picture and the face model.
And even though deep learning has proven to be
highly useful in several applications, using it directly
in 3D from 2D facial reconstruction is constrained by
the absence of 3D facial scans that serve as a reliable
source of data. To overcome this problem of a lack of
ground truth data, academics have suggested many
methods for creating and learning from realistic
representative training data.
In this section, we present the most relevant works
in 3D-from-2D face reconstruction using deep
learning as the main tool. Many elements are involved
in the learning process. To simplify the study and
keep it related to the approach we propose, we will
only consider two representative ones in our literature
review both the learning framework and the training
set that were utilized to train the network. And,
according to these elements, we have organized this
section.
2.1 Training Data Set
The absence of ground truth data to be utilized as
training data is, as we indicated above, the main
challenge when using deep learning to 3D-from-2D
face reconstruction. This is due to the complexity and
hardship of obtaining a huge number of 3D facial
scans together with their corresponding 2D pictures.
To surpass this limitation, researchers proposed
methods either for using 2d datasets and then
compare the results to approaches based on 3D
datasets or simply constructing artificial training sets
and use 3DMMs that have already been constructed
to more easily generate 3D faces.
To create synthetic training sets, three basic
methodologies can be distinguished. Fit&Render is
how we ascribe to the first method.: It entails fitting a
3DMM to real-world photos and then producing
synthetic images with the predicted 3D faces. The
second one, Generate&Render: involves creating 3D
faces by randomly sampling from a 3DMM and then
rendering synthetic pictures with the resulting 3D
faces. On the other hand, in recent years, a novel
method has emerged that involves self-supervised
training, which eliminates the necessity for matched
2D and 3D data, therefore the need for artificial data
creation.
(Zhu et al., 2016) first proposed the Fit&Render
approach, which uses a face profile technique to
create pictures for bigger poses and build the 300W-
LP (300W large poses) database. They began by
fitting a 3DMM using (Romdhani & Vetter, 2005)
and (Xiangyu Zhu et al., 2015) over the back-drop to
estimate a 3D mesh over the provided facial picture.
Next, the 3D mesh was projected over the image and
rotated to create a synthetic version of the original
image with a bigger posture. Many other writers have
used this 300W-LP database (Bhagavatula et al.,
2017), (Feng et al., 2018) since it has complicated and
realistic face images., as well as 3DMM and
projection settings.
The Generate&Render approach involves taking
samples from a 3DMM to assemble real-world 3D
faces and then generating matching 2D pictures by
yielding the 3D faces under various circumstances.
(Poses, lighting, etc.). Because this technique does
not require a separate 3DMM fitting algorithm, the
reconstructive procedure does not limit the network's
capacity for learning. 2D pictures, however, are
not realistic, as opposed to the Fit&Render
method, because the rendering process is completely
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
746

Figure 1: Overview of our approach. (a) The full pipeline of reconstruction using both models (b) The training pipeline of R-
Net using the hybrid loss function.
syn-thetic, with synthetic backdrops,
lighting settings,
projection parameters, and so on. Furthermore, this
strategy does not get beyond the drawback of learning
from linearly-modeled data because a 3DMM is still
needed to build the ground truth 3D faces.
The works that employ the Generate&Render
methodology provide a number of solutions to deal
with these drawbacks, including the incorporation of
real data, the addition of artificial deformations to 3D
faces, and the use of more intricate training
frameworks.
With the scarcity of realistic ground truth 3D to
2D coupled data and the limitations of using synthetic
sets, self-supervision, an innovative method, gained
popularity. The crucial idea is that teaching is
provided by the data itself by introducing a render-er
layer at the network's edge (Tewari et al., 2017),
(Tewari et al., 2018), and (Shang et al., 2020).
As a result, using the sampling probabilities
discovered from photos of underlying data, the
network forecasts attributes for photos without
reference data.
2.2 Learning Framework
The core of the deep learning method is the network
itself, namely how it is designed and how it gets to
know its parameters. A single neural network trained
in a single pass is the simplest basic learning
framework. Alternatively, other researchers trained
their networks iteratively and/or took advantage of
the possibilities of more sophisticated designs
composed of several networks, such as encoder-
decoder architectures or generative adversarial
networks. In addition, some of the authors taught each
of the many networks to execute certain subtasks.
Despite the fact that triangular meshes are the most
common means of expressing 3D face data, most
works rely on alternative representations, such as
depth maps and 3DMM parameters. This is ow-ing to
the difficulty of traditional 2D convolution-based
networks to interpret non-Euclidean input like
meshes. However, a current study topic known as
geometric deep learning investigates ways to extend
convolutional networks to non-Euclidean inputs,
allowing for direct dealing with 3D face models.
When working with 2D data, convnets (CNNs)
have shown impressive results, prompting
researchers to employ CNNs to reconstruct the 3D
face from uncalibrated 2D photos (Tewari et
al.,2017), (Tewari et al., 2018), (Shang et al., 2020),
and (Wu et al., 2019). (Tewari et al., 2017), (Tewari
et al., 2018), (Shang et al., 2020) used the AlexNet
(Misra et al., 2016) to teach a CNN to learn from a
single image both the renderer (perception and
illumination characteristics) and 3DMM
configurations (form, ex-pressions, and texturing). At
first, the resultant reconstructions in (Tewari et al.,
2017) work were crude, and face features were not
preserved. They, later (Tewari et al., 2018), (Shang et
al., 2020) improved the coarse face produced by using
a model that was learned from the training data,
AlexNet calculates relative motion for every polygon
as coefficients
Contrarily, (Wu et al., 2019) and (Ramon et al.,
2019) used the CNN to retrieve information from the
image, which were then processed by numerous
adjacent layers to individually reconstruct the 3DMM
and projection settings. Since the VGG-Net is a
deeper network than the AlexNet (Misra et al., 2016),
they used it as a feature extractor because it enables
them to harvest more important properties even
though it is slow.
(Tran et al., 2018) used numerous perspectives in
the same way as (Wu et al., 2019), and (Ramon et al.,
2019) did. The former sought face recognition and
therefore taught the ResNet to be discriminative by
utilizing a training set containing the same 3D face
related to several images of the same individual.
(Deng et al., 2019) retrieved the final reconstruction
by linearly integrating single-image reconstructions
based on confidence ratings calculated by a second
network. As a result, a more precise reconstruction
contributed more to the final re-construction, yielding
better outcomes than averaging the forms. Unlike
(Deng et al., 2019), (Shang et al., 2020) used different
A Novel 3D Face Reconstruction Model from a Multi-Image 2D Set
747

perspectives to further push the reconstruction
process. They used Multiview consistency to rebuild
the 3D face matching to a target image from two
nearby views, allowing them to tweak the final
reconstruction using all three images at the same time.
Nonetheless, this technique requires the authors to
train their network using adjacent images, whereas
(Deng et al., 2019) could train their networks with a
collection of images that were “unrelated.”
At contrary to the single pass training used by the
works we just discussed, some writers advocated
training their networks iteratively. We may
differentiate two approaches: one is focused on
iteratively enhancing the synthetic training set, while
the other is based on repeatedly refining the previous
iteration's outcome. The second technique is
analogous to a cascaded regressor in that each
regressor estimates an update of the input parameters
estimated by the preceding regressor, bringing them
closer to the ground truth. The majority of the planned
works used the same architecture across all iterations
(Richardson et al. 2016), (Sanyal et al. 2019).
A ResNet-based network was proposed by
(Richardson et al. 2016) and (Sanyal et al. 2019). For
the first team the pose is pre-computed using (Kazemi
& Sullivan, 2014) and they trained the ResNet to
estimate the 3DMM parameters. (Sanyal et al. 2019)
estimated the pose in conjunction with the 3DMM
parameters. They trained their network by making use
of several perspectives and increasing the shape
distance between parameters of different persons
while decreasing it between parameters of the same
person.
3 MATERIALS AND METHODS
Fig. 1 (a) shows how we use a convolutional neural
network to regress the coefficients of a 3DMM face
model. We additionally regress the lighting and facial
pose for unsupervised/weakly supervised training
(Tewari et al., 2017), (Tewari et al., 2018) to enable
analytic image regeneration. Below a description is
detailed of how our model works and outputs in
further depth, namely using its three mathematical
components; a 3D Face Model, an illumination
model, and a camera model.
An affine system of equations can clearly describe
how the shape of a face, noted S, and its
corresponding texture, noted T, can be represented:
𝑆=𝑆
(
𝛼,𝛽
)
=𝑆
̅
+𝐵
𝛼+𝐵
𝛽
𝑇=𝑇
(
𝛿
)
=𝑇
+𝐵
𝛿
T
̄
and S
̄
represent the average values of T and S.
We scale with a standard deviation the PCA bases of
identity noted B
id
, B
exp
, and B
t
.
α, β, and δ represent the coefficient vectors for
generating a 3D face. The well-known Basel Face
Model from (Paysan et al., 2009) is used to determine
S
̄
, B
id
, T
̄
and B
t
. And from (Guo et al., 2019) we use
the expression bases B
exp
which is built from
FaceWarehouse (Chen Cao et al., 2014). By
excluding the neck and ear regions an selecting a
subset of the bases resulting in α ∈ R
80
, β ∈ R
64
and δ
∈ R
80
we can get our resulting model that contains
36K vertices.
A Lambertian surface for face is assumed. And
the scene illumination is approximated with Spherical
Harmonics (SH) (Ramamoorthi et al. 2001). Given
the following equation:
𝐶
(
𝑛
𝑡
|
𝛾
)
=𝑡
𝛾
𝜑
(𝑛
)
We can calculate S
i
being the radiosity of a vertex,
n
i
being the surface normal, and t
i
being the skin
texture. Spherical harmonics basis functions are
noted 𝜑
:ℝ
→ℝ and their corresponding
coefficients are noted 𝛾
. Just like (Tewari et al.,
2017),(Tewari et al., 2018), the number of bands is
chosen as B=3 bands and monochromatic lights are
assumed such that γ ∈ ℝ
.
For the geometry of the 3D-2D projection, we
employ the perspective camera model with an
experimentally chosen focal length. A translation t
and a rotation R are used to represent the 3D face pose
p such as 𝑹 ∈ 𝑺𝑶(𝟑) and 𝒕 ∈ ℝ
𝟑
. The output of our
model is a vector representing the unknowns to be
determined𝑥=
(
𝛼,𝛽,𝛿,𝛾,𝑝
)
∈ℝ
𝟐𝟑𝟗
. In this paper,
by modifying the last fully-connected layer to 239
neurons, we try to regress the mentioned coefficients
using a ResNet-50 neural network (He et al., 2016)
(Deng et al., 2019). Henceforth, we will be referring
to this ResNet-50 model as R-Net. In the following
sections, we present how we train it.
3.1 Single Image Reconstruction
As stated previously, R-net is used to regress a
coefficient vector x as an output, and for this task the
model’s input is an RGB image noted I. When
passing the image I, we get its corresponding vector
x as output, this vector is then used to analytically
generate a reconstructed image I’ (Fig. 1. shows some
examples of this process). By backpropagating a
hybrid-level loss evaluated on I’, we can train R-net
without any ground truth labels.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
748

This hybrid-level loss is composed of two functions;
an Image-level loss, and a Perception-level loss.
As for the image level loss, we used the same
skin-aware photometric loss as (Deng et al., 2019)
such as:
𝐿
(
𝑥
)
=
∑
𝐴
.
‖
𝐼
𝐼
(𝑥)
‖
∈
∑
𝐴
∈
Where:
• i is pixel index.
• M denotes the reprojected face region.
• A is a skin attention mask created using a
naïve Bayes classifier on a skin image
dataset [26] and for each pixel setting 𝐴
=
1 𝑖𝑓 𝑃
0.5
𝑃
𝑜𝑡ℎ𝑒𝑟𝑤𝑖𝑠𝑒
and as seen bellow Fig. 2.
shows the results with (bottom row) and
without (top row) a skin attention mask.
Figure 2: The effect of using a skin attention mask.
(Top row: without mask, bottom row with mask)
(Deng et al., 2019)
And for face alignment, we use the method of
(Suttie et al., 2013) in detecting 68 facial landmarks
{qn} for the training images. By projecting the
landmarks vertices of our reconstructed shape onto
the resulting image I’ we obtain {q’n} which we use
to compute the loss as:
𝐿
(
𝑥
)
=
𝜔
𝑞
𝑞
(𝑥)
Experimenting with 𝜔
led to setting it to 20 for
mouth and nose points and 1 for others.
As for the perception-level loss, inspired by (Yang
et al., 2015) and (Deng et al., 2019) we used the
following cosine distance:
𝐿
(
𝑥
)
=1
𝑓
(
𝐼
)
,𝑓𝐼
(
𝑥
)
‖
𝑓(𝐼)
‖
.
‖
𝑓(𝐼
(
𝑥
)
)
‖
With f(.) and <.,.> representing correspondently
deep feature encodings and vector inner product.
In our work, we use as deep feature extractor a
pretrained FaceNet structure (Schroff et al., 2015).
The regressed 3DMM coefficients could contain
some shape or texture degeneration on the face, in
order to prevent this from happening we apply
another loss function on said coefficients to impose a
distribution respecting the mean face:
𝐿
(𝑥) = 𝜔
‖
𝛼
‖
+𝜔
‖
𝛽
‖
+𝜔
‖
𝛾
‖
With:
𝜔
=1.0, 𝜔
=0.8, 𝜔
=1.7𝑒3
The Basel 2009 3DMM contain some dried shading
and we would like to maintain a constant skin shading
like (Tewari et al., 2018), for this we add a constraint
that reprimands the texture map variance:
𝐿
(
𝑥
)
= 𝑣𝑎𝑟(𝑇
,
(
𝑥
)
)
∈,,
With R being a predefined skin region involving the
forehead, cheek, and nose.
To summarize our training loss L(x) could be
described as a composition of three levels; a first level
having two image-level losses L
photo
and L
lan
, a second
level having one perceptual loss L
per
, and a third level
having two regularization losses L
coef
and L
tex
. The
corresponding weights for these losses are set to the
following values throughout our experiment:
𝜔
=1.9, 𝜔
=1.6𝑒3,
𝜔
=0.2, 𝜔
=3𝑒4,
𝜔
=5
3.2 Multi-Image Reconstruction
Even though reconstructing a face from a single
image input seems to be a great endeavour, such
reconstruction could be somewhat lacking in terms of
precision and resolution. As we made clear from
literature research, having multiple images of a face
would affect greatly the performance of a model in its
reconstruction task, since single images could be
subject to bad lighting or occlusions.
In this section of the paper, we propose building
an unsupervised machine learning model that goes
hands in hands with our previously created R-Net.
This model would make use of the output obtained
from R-Net and create a spacial representation of
different images of the same object, thus gaining
more information about the face and resulting in
better metrics for the reconstruction.
Creating and training a model with an arbitrary
number of images representing the same entity is not
a straightforward task. In this work we use K-means
as an aggregation algorithm to search for a vector
representation within a cluster of vectors obtained
from R-Net.
Given a set of M subjects with each having j
images, our approach could be described as follows;
A Novel 3D Face Reconstruction Model from a Multi-Image 2D Set
749
For each subject, we start by generating the
reconstructed image set {I
j
’} of {I
j
}. Thus,
resulting in having 𝑥
=(𝛼
,𝛽
,𝛿
,𝑝
,𝛾
)
the output vector of R-Net for each image j.
After obtaining 𝑀×𝑗 vectors, we create a K-
means models with K = M the number of
clusters.
Shuffle the vectors dataset and initialize the
centroids.
Then, we keep iterating until centroids no
longer change, meaning that the assignment of
data points to individual clusters isn’t
changing anymore.
By now, the algorithm computes the sum of
the squared distance between centroids and all
data points.
After computing distance equations, our
model assigns each data point to its closest
cluster.
Finally, the centroids for each cluster are
computed by taking the average of the data
points that belong to each cluster
The resulting clusters correspond each to a
vector 𝑥
=(𝛼
,𝛽
,𝛿
,𝑝
,𝛾
) with 𝑖 ∈ [1,𝑀].
Using these vectors, we reconstruct the face
model for each person respectively.
A last thing to note is that given the iterative nature of
K-means algorithm and the random initialization of
centroids at the start, an issue may arise with different
initializations leading to different clusters. Therefore,
we recommend using the same approach we did,
which is to run the algorithm using different
initializations of centroids and picking the run
yielding the lower sum of squared distance.
Moreover, since the nature of vectors obtained from
R-Net correspond to facial identities convergence is
achieved more easily since all the individual’s feature
vectors are close to each other in distance.
4 RESULTS
Training the R-Net model was done using multiple
sources namely; CelebA(Liu et al., 2015), 300W-
LP(Zhu et al., 2016), I-JBA(Klare et al., 2015),
LFW(B. Huang et al., 2008) and LS3D(Bulat &
Tzimiropoulos, 2017). Using these images, we took
in consideration the balancing of pose and race
distributions and got approximately 260K face
images.
The input size was set to 224x224. We used the
pretrained weights of ImageNetas initialization and
then trained the R-Net model using Adam optimizer,
a batch size of 8 and starting with a learning rate of
1e-4 ending after 500K iterations.
As for K-means, we used an image set that is
composed of our own facial recognition dataset, and
300W-LP(Zhu et al., 2016) from which we choose 5
random images for each person in various poses and
lighting. The resulting data-set has approximately
20K images of 5K identities.
Some of the reconstruction results seen in Fig 3.
bellow show the resulting images and 3D models of
our R-Net model. As observed clearly, the obtained
3D model is very smooth and lacks any visible
anomalies.
Figure 3: Examples of the results obtained through R-Net
model.
For fair comparison with previous results in the
current literature, we studied the results of our models
on the MICC Florence 3D Face Dataset (Bagdanov et
al., 2011) which contains 53 subjects each having a
neutral expression ground truth and three video
sequences taken in 3 three different scenarios:
cooperative, indoor, and outdoor. Table 1 and Fig 4
shows a comparison between the results from our R-
Net , the results from (Tran et al., 2017), those from
(Genova et al., 2018) and those from (Deng et al.,
2019).
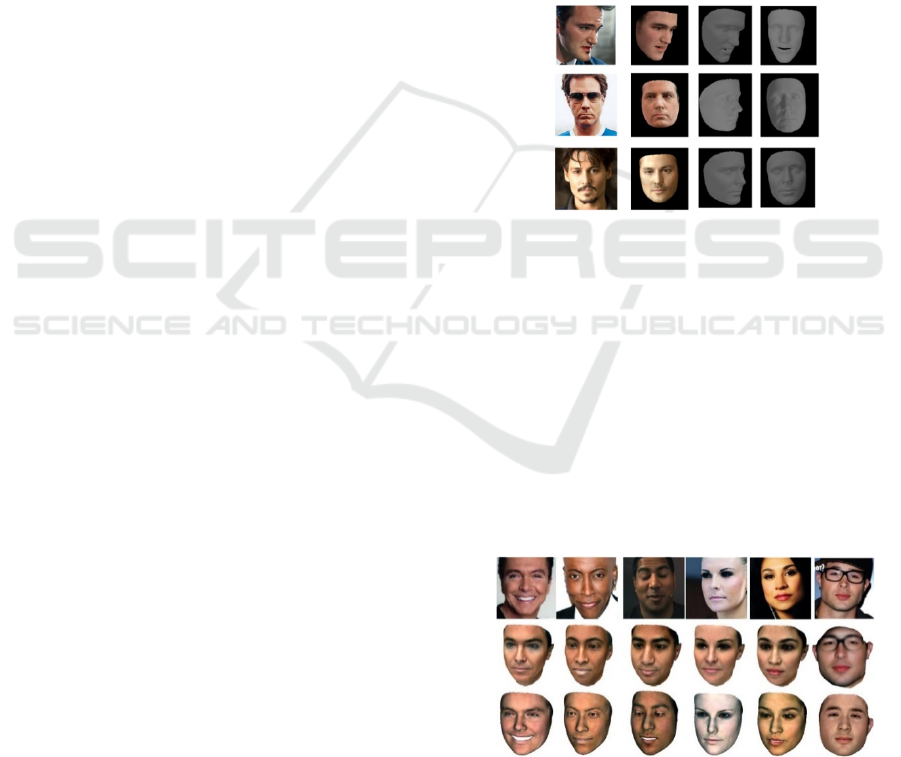
Figure 4: Comparison with the work done by (Genova et
al., 2018) in the second row and ours in the last row.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
750
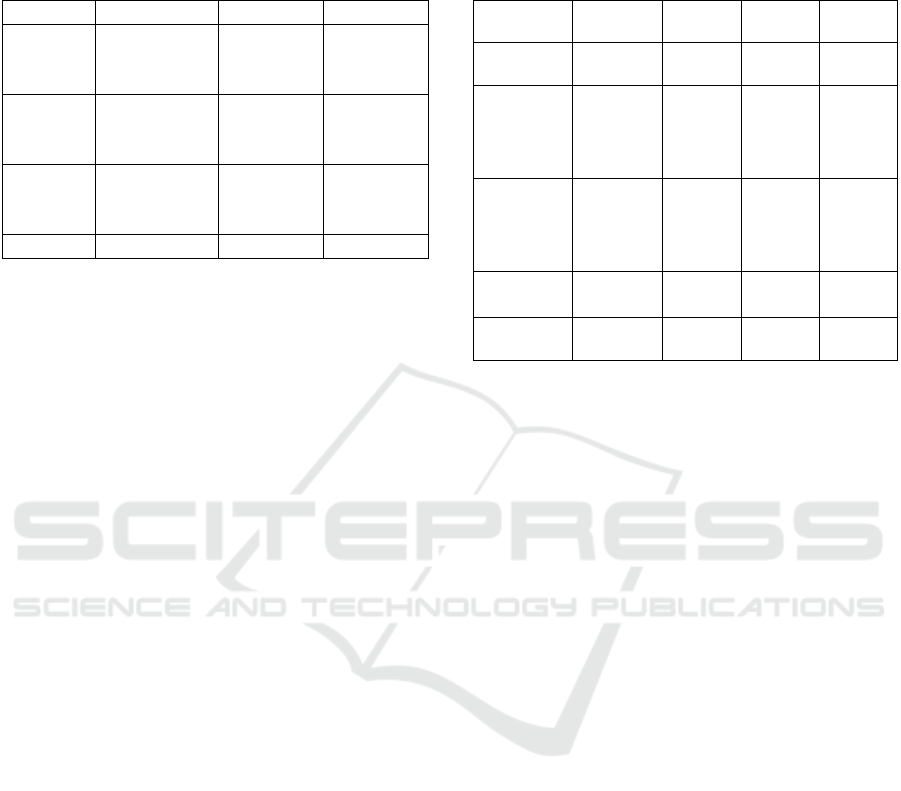
Table 1: Mean Root Mean Squared Error (RMSE) across
53 subjects on MICC dataset (in mm). We use ICP for
alignment and compute point-to-plane distance between
results and ground truth.
Metho
d
Cooperative Indoo
r
Outdoo
r
(Tran et
al.,
2017)
1.97±0.49 2.03±0.45 1.93±0.49
(Genova
et al.,
2018)
1.78±0.54 1.78±0.52 1.76±0.54
(Deng et
al.,
2019)
1.66±0.52 1.66±0.46 1.69±0.53
Ours 1.65±0.49 1.66±0.57 1.69±0.53
As seen, our results surpass those of (Genova et
al., 2018) and (Tran et al., 2017) both in visual renders
and RMSE, even though we cut the ground truth
meshes to compensate for (Tran et al., 2017) only
containing part of the forehead. As for (Deng et al.,
2019) our results are very close to each other due to
having arguably similar model architecture when it
comes to R-Net and working on the level of single
image reconstruction.
However, working on multi-image
reconstruction, table 2 below shows that using K-
means alongside R-Net clearly outperforms other
methods.
The fact that our R-Net produces smooth and
superior quality face shapes, and that by itself it
surpasses some of the literature results, would ensure
that adding a second layer on top of it, in our case the
K-means, converges for even better results. This, to
our knowledge, is the first approach applying K-
means to face reconstruction attaining such results.
And through qualitative analysis we further
demonstrated the interesting contribution done in this
paper.
5 CONCLUSIONS
In this paper, we designed and trained a ResNet based
model for the task of face reconstruction from a single
image. This model was trained using a custom loss
function that exploits image data levels without the
need for 3D ground truth shapes. And it showed great
results in comparison with previous work done in the
literature review.
Furthermore, we improved the outcomes by using
information from multiple image which provides
better insights on the facial structure. This was done
Table 2: Results for multi-image recognition on MICC
dataset, using the strategy of (Piotraschke & Blanz, 2016).
S and G here denote segment-based aggregation and global
based aggregation.
Method Cooperat
ive
Indoor Outdoo
r
All
Shape
averaging
1.97±0.4
9
2.03±0.
45
1.93±0.
49
1.62±0.
51
(Piotrasc
hke &
Blanz,
2016)
-G
1.78±0.5
4
1.78±0.
52
1.76±0.
54
1.65±0.
55
(Piotrasc
hke &
Blanz,
2016)
-S
1.66±0.5
2
1.66±0.
46
1.69±0.
53
1.65±0.
55
(Deng et
al., 2019)
1.60±0.5
1
1.61±0.
44
1.63±0.
47
1.56±0.
48
Ours 1.59±0.5
3
1.61±0.
50
1.62±0.
51
1.54±0.
52
by taking ad-vantage of the K-means algorithm
through its characteristics that computes centroids of
data cluster, resulting in far better understanding and
representation of feature vectors.
REFERENCES
Zhang, L., Jiang, M., Farid, D., & Hossain, M. (2013,
October). Intelligent facial emotion recognition and
semantic-based topic detection for a humanoid robot.
Expert Systems With Applications, 40(13), 5160–5168.
Kaplan, S., Guvensan, M. A., Yavuz, A. G., & Karalurt, Y.
(2015, December). Driver Behavior Analysis for Safe
Driving: A Survey. IEEE Transactions on Intelligent
Transportation Systems, 16(6), 3017–3032.
Burton, A. M., Wilson, S., Cowan, M., & Bruce, V. (1999,
May). Face Recognition in Poor-Quality Video:
Evidence From Security Surveillance. Psychological
Science, 10(3), 243–248.
Weise, T., Bouaziz, S., Li, H., & Pauly, M. (2011, July).
Realtime performance-based facial animation. ACM
Transactions on Graphics, 30(4), 1–10.
Weise, T., Li, H., Van Gool, L., & Pauly, M. (2009).
Face/Off. Proceedings of the 2009 ACM
SIGGRAPH/Eurographics Symposium on Computer
Animation - SCA ’09.
EL Rai, M. C., Werghi, N., Al Muhairi, H., & Alsafar, H.
(2015, February). Using facial images for the diagnosis
of genetic syndromes: A survey. 2015 International
Conference on Communications, Signal Processing,
and Their Applications (ICCSPA’15).
Suttie, M., Foroud, T., Wetherill, L., Jacobson, J. L.,
Molteno, C. D., Meintjes, E. M., Hoyme, H. E., Khaole,
N., Robinson, L. K., Riley, E. P., Jacobson, S. W., &
Hammond, P. (2013, March 1). Facial Dysmorphism
A Novel 3D Face Reconstruction Model from a Multi-Image 2D Set
751

Across the Fetal Alcohol Spectrum. Pediatrics, 131(3),
e779–e788.
Alexander, O., Rogers, M., Lambeth, W., Jen-Yuan
Chiang, Wan-Chun Ma, Chuan-Chang Wang, &
Debevec, P. (2010, July). The Digital Emily Project:
Achieving a Photorealistic Digital Actor. IEEE
Computer Graphics and Applications, 30(4), 20–31.
Beeler, T., Hahn, F., Bradley, D., Bickel, B., Beardsley, P.,
Gotsman, C., Sumner, R. W., & Gross, M. (2011, July).
High-quality passive facial performance capture using
anchor frames. ACM Transactions on Graphics, 30(4),
1–10.
Lee, Y., Terzopoulos, D., & Walters, K. (1995). Realistic
modeling for facial animation. Proceedings of the 22nd
Annual Conference on Computer Graphics and
Interactive Techniques - SIGGRAPH ’95.
Yang, L., Zhang, L., Dong, H., Alelaiwi, A., & El Saddik,
A. (2015, August). Evaluating and Improving the Depth
Accuracy of Kinect for Windows v2. IEEE Sensors
Journal, 15(8), 4275–4285.
Booth, J., Roussos, A., Ververas, E., Antonakos, E.,
Ploumpis, S., Panagakis, Y., & Zafeiriou, S. (2018,
November 1). 3D Reconstruction of “In-the-Wild”
Faces in Images and Videos. IEEE Transactions on
Pattern Analysis and Machine Intelligence, 40(11),
2638–2652.
Guo, Y., Zhang, J., Cai, J., Jiang, B., & Zheng, J. (2019,
June 1). CNN-Based Real-Time Dense Face
Reconstruction with Inverse-Rendered Photo-Realistic
Face Images. IEEE Transactions on Pattern Analysis
and Machine Intelligence, 41(6), 1294–1307.
Zhu, X., Liu, X., Lei, Z., & Li, S. Z. (2019, January 1). Face
Alignment in Full Pose Range: A 3D Total Solution.
IEEE Transactions on Pattern Analysis and Machine
Intelligence, 41(1), 78–92.
Romdhani, S., & Vetter, T. (n.d.). Estimating 3D Shape and
Texture Using Pixel Intensity, Edges, Specular
Highlights, Texture Constraints and a Prior. 2005 IEEE
Computer Society Conference on Computer Vision and
Pattern Recognition (CVPR’05).
Xiangyu Zhu, Lei, Z., Junjie Yan, Yi, D., & Li, S. Z. (2015,
June). High-fidelity Pose and Expression
Normalization for face recognition in the wild. 2015
IEEE Conference on Computer Vision and Pattern
Recognition (CVPR).
Bhagavatula, C., Zhu, C., Luu, K., & Savvides, M. (2017,
October). Faster than Real-Time Facial Alignment: A
3D Spatial Transformer Network Approach in
Unconstrained Poses. 2017 IEEE International
Conference on Computer Vision (ICCV).
Feng, Y., Wu, F., Shao, X., Wang, Y., & Zhou, X. (2018).
Joint 3D Face Reconstruction and Dense Alignment
with Position Map Regression Network. Computer
Vision – ECCV 2018, 557–574.
Zhu, X., Lei, Z., Liu, X., Shi, H., & Li, S. Z. (2016, June).
Face Alignment Across Large Poses: A 3D Solution.
2016 IEEE Conference on Computer Vision and
Pattern Recognition (CVPR).
Richardson, E., Sela, M., & Kimmel, R. (2016, October).
3D Face Reconstruction by Learning from Synthetic
Data. 2016 Fourth International Conference on 3D
Vision (3DV).
Richardson, E., Sela, M., Or-El, R., & Kimmel, R. (2017,
July). Learning Detailed Face Reconstruction from a
Single Image. 2017 IEEE Conference on Computer
Vision and Pattern Recognition (CVPR).
Sela, M., Richardson, E., & Kimmel, R. (2017, October).
Unrestricted Facial Geometry Reconstruction Using
Image-to-Image Translation. 2017 IEEE International
Conference on Computer Vision (ICCV).
Wu, Y., Shah, S. K., & Kakadiaris, I. A. (2016, February).
Rendering or normalization? An analysis of the 3D-
aided pose-invariant face recognition. 2016 IEEE
International Conference on Identity, Security and
Behavior Analysis (ISBA).
Tewari, A., Zollhofer, M., Kim, H., Garrido, P., Bernard,
F., Perez, P., & Theobalt, C. (2017, October). MoFA:
Model-Based Deep Convolutional Face Autoencoder
for Unsupervised Monocular Reconstruction. 2017
IEEE International Conference on Computer Vision
(ICCV).
Tewari, A., Zollhofer, M., Garrido, P., Bernard, F., Kim,
H., Perez, P., & Theobalt, C. (2018, June). Self-
Supervised Multi-level Face Model Learning for
Monocular Reconstruction at Over 250 Hz. 2018
IEEE/CVF Conference on Computer Vision and
Pattern Recognition.
Tewari, A., Zollhofer, M., Bernard, F., Garrido, P., Kim,
H., Perez, P., & Theobalt, C. (2020, February 1). High-
Fidelity Monocular Face Reconstruction Based on an
Unsupervised Model-Based Face Autoencoder. IEEE
Transactions on Pattern Analysis and Machine
Intelligence, 42(2), 357–370.
Zhou, Y., Deng, J., Kotsia, I., & Zafeiriou, S. (2019, June).
Dense 3D Face Decoding Over 2500FPS: Joint Texture
& Shape Convolutional Mesh Decoders. 2019
IEEE/CVF Conference on Computer Vision and
Pattern Recognition (CVPR).
Wu, F., Bao, L., Chen, Y., Ling, Y., Song, Y., Li, S., Ngan,
K. N., & Liu, W. (2019, June). MVF-Net: Multi-View
3D Face Morphable Model Regression. 2019
IEEE/CVF Conference on Computer Vision and
Pattern Recognition (CVPR).
Sanyal, S., Bolkart, T., Feng, H., & Black, M. J. (2019,
June). Learning to Regress 3D Face Shape and
Expression From an Image Without 3D Supervision.
2019 IEEE/CVF Conference on Computer Vision and
Pattern Recognition (CVPR).
Liu, F., Tran, L., & Liu, X. (2019, October). 3D Face
Modeling From Diverse Raw Scan Data. 2019
IEEE/CVF International Conference on Computer
Vision (ICCV).
Tu, X., Zhao, J., Xie, M., Jiang, Z., Balamurugan, A., Luo,
Y., Zhao, Y., He, L., Ma, Z., & Feng, J. (2021). 3D Face
Reconstruction From A Single Image Assisted by 2D
Face Images in the Wild. IEEE Transactions on
Multimedia, 23, 1160–1172.
Misra, I., Shrivastava, A., Gupta, A., & Hebert, M. (2016,
June). Cross-Stitch Networks for Multi-task Learning.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
752

2016 IEEE Conference on Computer Vision and
Pattern Recognition (CVPR).
Ramon, E., Escur, J., & Giro-i-Nieto, X. (2019, October).
Multi-View 3D Face Reconstruction in the Wild Using
Siamese Networks. 2019 IEEE/CVF International
Conference on Computer Vision Workshop (ICCVW).
Deng, Y., Yang, J., Xu, S., Chen, D., Jia, Y., & Tong, X.
(2019, June). Accurate 3D Face Reconstruction With
Weakly-Supervised Learning: From Single Image to
Image Set. 2019 IEEE/CVF Conference on Computer
Vision and Pattern Recognition Workshops (CVPRW).
Shang, J., Shen, T., Li, S., Zhou, L., Zhen, M., Fang, T., &
Quan, L. (2020). Self-Supervised Monocular 3D Face
Reconstruction by Occlusion-Aware Multi-view
Geometry Consistency. Computer Vision – ECCV
2020, 53–70.
Kazemi, V., & Sullivan, J. (2014, June). One millisecond
face alignment with an ensemble of regression trees.
2014 IEEE Conference on Computer Vision and
Pattern Recognition.
Paysan, P., Knothe, R., Amberg, B., Romdhani, S., &
Vetter, T. (2009, September). A 3D Face Model for
Pose and Illumination Invariant Face Recognition. 2009
Sixth IEEE International Conference on Advanced
Video and Signal Based Surveillance.
Chen Cao, Yanlin Weng, Shun Zhou, Yiying Tong, & Kun
Zhou. (2014, March). FaceWarehouse: A 3D Facial
Expression Database for Visual Computing. IEEE
Transactions on Visualization and Computer Graphics,
20(3), 413–425.
Ramamoorthi, R., & Hanrahan, P. (2001). An efficient
representation for irradiance environment maps.
Proceedings of the 28th Annual Conference on
Computer Graphics and Interactive Techniques -
SIGGRAPH ’01.
Ramamoorthi, R., & Hanrahan, P. (2001). A signal-
processing framework for inverse rendering.
Proceedings of the 28th Annual Conference on
Computer Graphics and Interactive Techniques -
SIGGRAPH ’01.
He, K., Zhang, X., Ren, S., & Sun, J. (2016, June). Deep
Residual Learning for Image Recognition. 2016 IEEE
Conference on Computer Vision and Pattern
Recognition (CVPR).
Schroff, F., Kalenichenko, D., & Philbin, J. (2015, June).
FaceNet: A unified embedding for face recognition and
clustering. 2015 IEEE Conference on Computer Vision
and Pattern Recognition (CVPR).
Liu, Z., Luo, P., Wang, X., & Tang, X. (2015, December).
Deep Learning Face Attributes in the Wild. 2015 IEEE
International Conference on Computer Vision (ICCV).
Klare, B. F., Klein, B., Taborsky, E., Blanton, A., Cheney,
J., Allen, K., Grother, P., Mah, A., Burge, M., & Jain,
A. K. (2015, June). Pushing the frontiers of
unconstrained face detection and recognition: IARPA
Janus Benchmark A. 2015 IEEE Conference on
Computer Vision and Pattern Recognition (CVPR).
B. Huang, Ramesh, Berg, & Learned-Miller. (2008).
Labeled faces in the wild: A database for studying face
recognition in unconstrained environments. University
of Massachusetts, Amherst, 07–49.
Bulat, A., & Tzimiropoulos, G. (2017, October). How Far
are We from Solving the 2D & 3D Face Alignment
Problem? (and a Dataset of 230,000 3D Facial
Landmarks). 2017 IEEE International Conference on
Computer Vision (ICCV).
Bagdanov, A. D., Del Bimbo, A., & Masi, I. (2011,
December). The florence 2D/3D hybrid face dataset.
Proceedings of the 2011 Joint ACM Workshop on
Human Gesture and Behavior Understanding.
Tran, A. T., Hassner, T., Masi, I., & Medioni, G. (2017,
July). Regressing Robust and Discriminative 3D
Morphable Models with a Very Deep Neural Network.
2017 IEEE Conference on Computer Vision and
Pattern Recognition (CVPR).
Genova, K., Cole, F., Maschinot, A., Sarna, A., Vlasic, D.,
& Freeman, W. T. (2018, June). Unsupervised Training
for 3D Morphable Model Regression. 2018 IEEE/CVF
Conference on Computer Vision and Pattern
Recognition.
Piotraschke, M., & Blanz, V. (2016, June). Automated 3D
Face Reconstruction from Multiple Images Using
Quality Measures. 2016 IEEE Conference on Computer
Vision and Pattern Recognition (CVPR).
A Novel 3D Face Reconstruction Model from a Multi-Image 2D Set
753
