
Learning Independently from Causality in Multi-Agent Environments
Rafael Pina
a
, Varuna De Silva
b
and Corentin Artaud
Institute for Digital Technologies, Loughborough University London, 3 Lesney Avenue, London, U.K.
Keywords:
Multi-Agent Reinforcement Learning, Causality, Deep Learning.
Abstract:
Multi-Agent Reinforcement Learning (MARL) comprises an area of growing interest in the field of machine
learning. Despite notable advances, there are still problems that require investigation. The lazy agent pathol-
ogy is a famous problem in MARL that denotes the event when some of the agents in a MARL team do not
contribute to the common goal, letting the teammates do all the work. In this work, we aim to investigate this
problem from a causality-based perspective. We intend to create the bridge between the fields of MARL and
causality and argue about the usefulness of this link. We study a fully decentralised MARL setup where agents
need to learn cooperation strategies and show that there is a causal relation between individual observations
and the team reward. The experiments carried show how this relation can be used to improve independent
agents in MARL, resulting not only on better performances as a team but also on the rise of more intelligent
behaviours on individual agents.
1 INTRODUCTION
The use of causality in the field of Artificial Intelli-
gence (AI) has been gaining the attention of the re-
search community. Recent discussions argue how
causality can play an important role to improve many
traditional machine learning approaches (Peters et al.,
2017). More specifically, recent works argue that
causality can be used to get a deeper understanding of
the underlying properties of systems within the field
of AI. While it can be relatively straight forward to
learn the underlying distributions of a given system, to
understand the cause of the events in the environments
can be a key to a richer representation of the dynamics
of the system (Peters et al., 2017). For instance, hu-
mans apply causal reasoning in their everyday lives,
whereas AI entities are currently incapable of such
reasoning. A popular example in the healthcare field
is when a certain model trained to make predictions
mistakes correlations for causations. If the model is
predicting patient health needs based on many fac-
tors, it is likely that it will be doing it based on some
correlation found. However, in certain cases some of
the correlations found might not explain the predic-
tion for all the cases, since the factor found would
not be the cause of the prediction, although they were
somehow correlated (Sgaier et al., 2020).
a
https://orcid.org/0000-0003-1304-3539
b
https://orcid.org/0000-0001-7535-141X
Motivated by the indications of how causality can
be so successfully linked to machine learning, the ap-
plications have been studied in different fields. In
neurology, causality has been used to find causal rela-
tions among different regions of the brain (Glymour
et al., 2019). This can be important to understand the
reason of certain events lighted by different parts of
our brains. Besides the relevance in the healthcare
field, in agriculture it can be critical to understand
what is causing the harvesting to be less fruitful in one
year than in the previous, and not only to see what is
correlated to this event (Sgaier et al., 2020).
Applications involving more advanced machine
learning methods have been rising. For instance,
in (Kipf et al., 2018) the authors enlighten how
causal relations can also be found in human bodies
to understand relations among joints when moving.
When it comes to time series analysis, the applica-
tions are numerous. Starting from the foundations
of Granger Causality (Granger, 1969), causal discov-
ery in time series has evolved quickly with notable
progress. Causal discovery has proved to be help-
ful in time series prediction related to areas such as
weather forecasting or finance (Hlav
´
a
ˇ
ckov
´
a-Schindler
et al., 2007). More advanced techniques have also
shown how the basic concepts of the traditional statis-
tics causality can be integrated with deep learning
methods. A popular approach is to use an encoder-
decoder architecture to model the causal relations of
Pina, R., De Silva, V. and Artaud, C.
Learning Independently from Causality in Multi-Agent Environments.
DOI: 10.5220/0011747900003411
In Proceedings of the 12th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2023), pages 481-487
ISBN: 978-989-758-626-2; ISSN: 2184-4313
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
481

a certain system (Zhu et al., 2020; L
¨
owe et al., 2022;
Huang et al., 2020). Alternatives inspired by Granger
Causality have also been presented. For instance, the
application of Transfer Entropy (Schreiber, 2000) is
seen as a popular alternative for causal discovery in
time series. In fact, this metric is so much related
to the traditional Granger Causality that it has been
proved that the two metrics are equivalent for Gaus-
sian variables (Barnett et al., 2009).
Despite the advances made with causal relations in
machine learning, finding these relations is still chal-
lenging (Sgaier et al., 2020). Most machine learning
models have problems to recognize the patterns nec-
essary to say if two events are correlated or if instead
one is the cause of the other. Prompted by the inspir-
ing discoveries in the field, we intend to show how we
can use causal estimations within the context of AI in
the aims of solving complex cooperative tasks. In par-
ticular, we aim to demonstrate how causal estimations
can be used in the field of Multi-Agent Reinforce-
ment Learning (MARL) and train these AI agents to
work as a team and solve cooperative tasks. MARL
is a growing topic in the field of machine learning
with many challenges yet to address (Canese et al.,
2021). In this sense, the goal of this work is to show
how causal estimations can be used to improve inde-
pendent learners in MARL, by tackling a well-known
problem in the field: the lazy agent problem (Sunehag
et al., 2018). By creating the bridge between MARL
and causal estimations we hope to open doors to fu-
ture works in the field, demonstrating how beneficial
the link of causal estimations and MARL can be to
develop more intelligent and capable entities.
2 BACKGROUND
2.1 Decentralised Partially Observable
Markov Decision Processes
(Dec-POMDPs)
In this work we consider Dec-POMDPs (Oliehoek A.
and Amato, 2016), defined by the tuple
⟨S, A, O, P, Z, r, γ,N⟩, where S and A represent the state
and joint action spaces, respectively. We consider
a setting where each agent i ∈ N ≡ {1, . . . , N}
has an observation o
i
∈ O(s, i) : S × N → Z.
Each agent keeps an action-observation history
τ
i
∈ T : (Z × A)
∗
, on which it conditions a stochastic
policy π
i
(a
i
|τ
i
) → [0, 1]. At each time step, each
agent i takes an action a
i
∈ A forming a joint
action a = {a
1
, . . . , a
N
}. Taking the joint action
at a state s, will make the environment transit to
a next state s
′
according to a probability function
P(s
′
|s, a) : S × A × S → [0, 1]. All the agents in the
team share a reward r(s, a) : S × A → R. Let γ ∈ [0, 1)
be a discount factor.
2.2 Independent Deep Q-Learning
Independent Q-learning (IQL) was introduced by
(Tan, 1993) as one of the foundations in MARL.
This approach follows the principles of single-agent
reinforcement learning and applies the basics of Q-
learning (Watkins and Dayan, 1992) for independent
learners that update their Q-functions individually
with a learning rate α following the rule
Q(s, a) = (1 − α)Q(s, a)
+ α
r + γmax
a
′
Q(s
′
, a
′
)
(1)
Later on, (Mnih et al., 2015) introduce Deep Q-
Networks (DQNs), a method that combines deep
neural networks with Q-learning, allowing agents to
approximate their Q-functions as deep neural net-
works instead of simple lookup tables as in simple
Q-learning. This approach introduces the use of a re-
play buffer that stores past experiences of the agents,
and a target network that aims to stabilise the learning
process. The DQN is updated in order to minimise
the loss (Mnih et al., 2015)
L(θ) = E
b∼B
r + γmax
a
′
Q(s
′
, a
′
;θ
−
)
−Q(s, a; θ)
2
i
(2)
where θ and θ
−
are the parameters of the Q-network
and a target Q-network, respectively, for a certain ex-
perience sample b sampled from a replay buffer B.
(Tampuu et al., 2015) put together the concepts of
IQL and DQN to create independent learners that use
DQNs. In this paper we refer to this method as Inde-
pendent Deep Q-learning (IDQL).
2.3 Causality in Time Series
To build our causality-based approach we used as mo-
tivation the concept of Transfer Entropy (Schreiber,
2000). Transfer entropy is a metric that has been
widely used to infer about causality relationships in
time series for different fields (Smirnov, 2013). Cor-
relation and causality are two concepts that are of-
ten misunderstood. Given two time series, while they
might be correlated with each other, they may not nec-
essarily be impacted one by another (Rohrer, 2018).
Prompted by these concepts, we use the transfer en-
tropy to create the link between causality and MARL
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
482
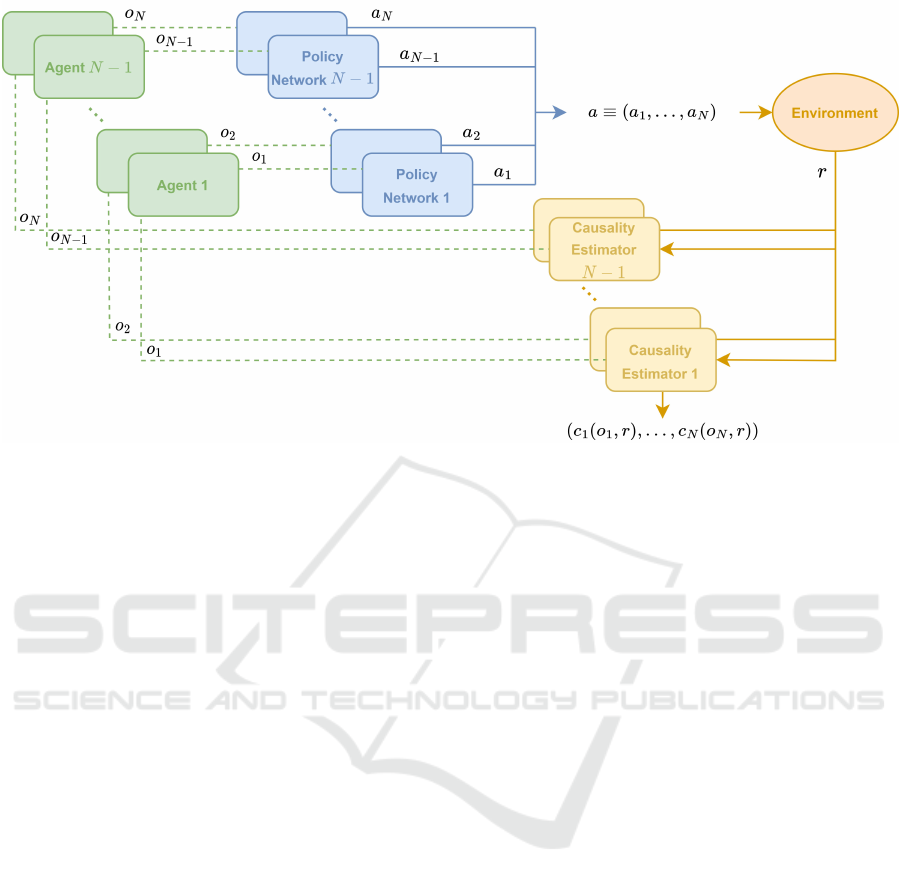
Figure 1: Architecture of the framework described to improve independent learners in MARL using causality detection. Each
agent is controlled by an independent network that is updated independently based on the output of the causality estimator, as
per Eq. 6.
scenarios. Definition 1 states the formal definition of
the Transfer Entropy.
Definition 1. Given a bivariate time series y with vari-
ables X and Y , the transfer entropy of X on Y can be
expressed as (Aziz, 2017)
T
X→Y
H(Y
t
|Y
−
t
) − H(Y
t
|Y
−
t
, X
−
t
) (3)
where H represents the Shannon’s Entropy at a given
time stamp t and X
−
t
and Y
−
t
represent the previous
values of the time series, up to t.
3 CAUSALITY IN MARL
In this section we present the proposed method in this
paper, named Independent Causal Learning (ICL).
This method aims to punish lazy agents and as a re-
sult improve the performance of MARL agents in co-
operative tasks. The key for the proposed method is
the use of an agent-wise causality factor c
i
that each
agent i : i ∈ {1, . . . , N} uses to attribute or not the
team reward to itself. This way, with the proposed
method we intend to improve the credit assignment to
the agents in cooperative multi-agent tasks. Each in-
dividual agent should be able to understand whether it
is helping the team to achieve the intended team goal
of the task or not. At the same time, this method en-
courages the agents to learn only by themselves. This
can be beneficial, since in many real scenarios it is
often unfeasible to provide the agents with the full in-
formation of the environment (Canese et al., 2021).
Hence, to learn optimal policies in such scenarios,
agents may be forced to rely only on their individual
observations to understand whether they are perform-
ing well or not. To motivate the proposed method, we
explore the concept of temporal causality, commonly
used in the context of time series, as stated in Def-
inition 1. Building up from this definition, we can
then create the bridge between causality and a MARL
problem.
Definition 2. Let E represent a certain episode sam-
pled from a replay buffer of experiences. Let E be
denoted as a multivariate time series of observations
O and rewards R. From Definition 1, we can then de-
fine the transfer entropy for the time series E as
T
O→R
= H(R
t
|R
−
t
) − H(R
t
|R
−
t
, O
−
t
) (4)
where T defines the amount of information reduced in
the future values of R by knowing the previous values
of R and O, and H is the Shannon’s Entropy.
Definition 2 states the motivation that supports the
existence of a causality relationship between observa-
tions and rewards when we see a reinforcement learn-
ing episode as a time series. Assuming that these
causal relations are indeed present in MARL and
can be estimated accurately, we can define a certain
function that calculates the causal relations between
the team reward and individual observations for each
agent i,
c
i
(o
i
, r) =
1 o
i
causes r
0 ¬ o
i
causes r
, i ∈ {1, . . . , N} (5)
Learning Independently from Causality in Multi-Agent Environments
483
When this causality factor is calculated accurately,
each agent can adjust the team reward received from
the environment and update its individual network
following the rule
Q
i
(τ
i
, a
i
) = (1 − α)Q
i
(τ
i
, a
i
)
+ α
"
c
i
(τ
i
, r) × r + γ max
a
′
i
Q
i
(τ
′
i
, a
′
i
)
#
(6)
In the considered training setting, the loss calcu-
lated by each agent is the same as in IDQL (Eq. 2),
but with respect to their individual networks Q
i
and
following the update in Eq. 6, resulting in the loss,
L(θ
i
) = E
b∼B
h
c
i
(τ
i
, r) × r
+ γ max
a
′
i
Q
i
(τ
′
i
, a
′
i
;θ
−
i
) − Q
i
(τ
i
, a
i
;θ
i
)
2
i
(7)
3.1 Causality Effect in MARL
Environments
In this subsection we describe the MARL environ-
ment used for the experiments in this paper and
show how c
i
can be intuitively estimated, when there
is some prior knowledge about the task. Fig. 1
illustrates the architecture of the proposed method
and how the calculation of c
i
is incorporated within
MARL. Note that the team rewards given result frrom
the sum of N individual rewards.
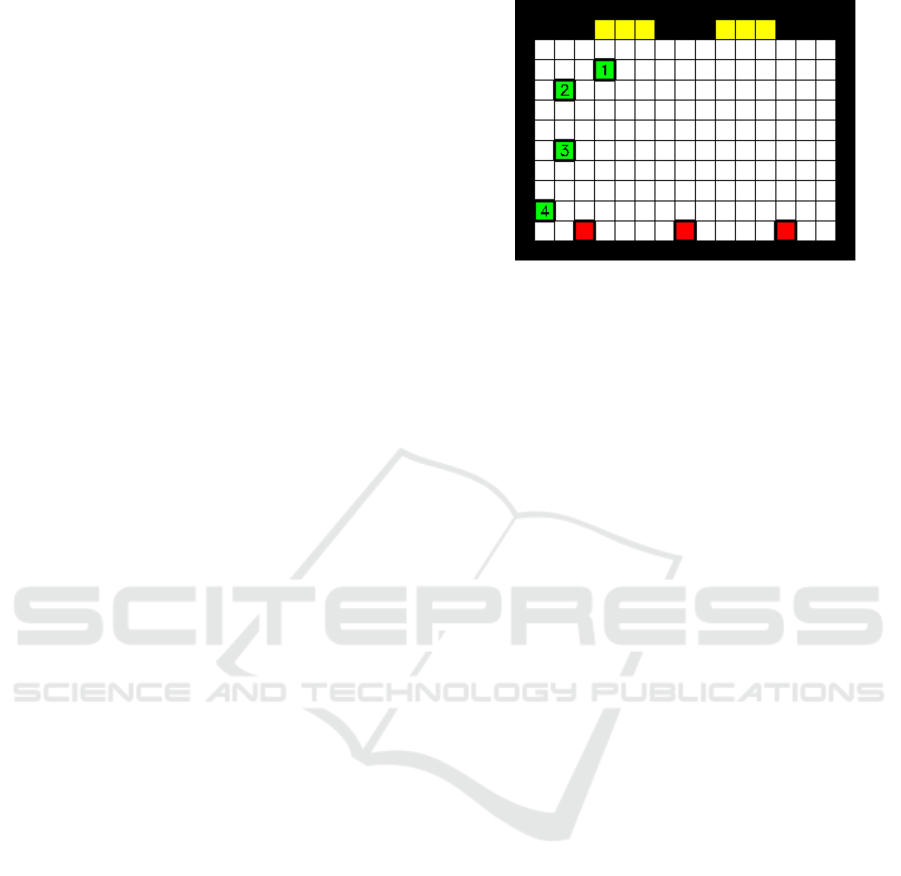
Warehouse. Warehouse is a grid world environment
with dimensions 10x15 (Fig. 2). The goal of this task
is to carry boxes from a box delivery queue (red) to
a pre-defined dropping station (yellow), simulating a
workstation in a real factory of robots with delivery
tasks to complete. However, in this environment each
box can only be carried by two agents at the same
time. In this sense, a team of 4 agents needs to co-
operate in order to maximise the number of boxes de-
livered to the dropping station over the duration of the
episodes (300 steps). Every time a box is successfully
dropped at the station, each agent receives a reward of
+5. Additionally, there is an intermediate reward of
+2 for when a box is lifted from the delivery queue.
However, in this environment there is also a wrong
dropping station that the agents should avoid (left yel-
low). If the agents drop a box at this fake station,
then each one will receive a reward of -5. So, beyond
learning to pick the boxes together, the agents should
also learn to always choose the right dropping station
(right yellow). The observation space for this envi-
ronment consists of a vector with the position of the
agent, a boolean flag F
i
that tells whether the agent i is
carrying a box or not, and an observation mask with
dimensions 5x5 around the agent. In this sense, the
Figure 2: Cooperative Warehouse environment used in the
experiments.
causality factors are calculated based on the following
condition: there is a positive team reward (box was ei-
ther picked from queue or delivered), and the agent is
carrying a box at the moment right before the reward
(box delivered) or the agent was carrying a box at the
moment of the reward (box picked),
C
1
=
True (F
t−1
i
∨ F
t
i
) ∧ r
t
> 0
False otherwise.
where F
i
is the boolean flag in the observation o
i
of
an agent i at a timestep t. In this scenario, the learn-
ing is improved by the perception of each agent about
whether they are carrying a box or not at the moment
of receiving a team reward. This intuition will coax
the agents to be more cooperative with the team, elim-
inating lazy agents and maximising the number of de-
livered boxes over the duration of the episodes.
4 EXPERIMENTS AND
DISCUSSIONS
In this section we evaluate the performance of the
proposed approach and use IDQL as the benchmark.
The motivation behind the use of the baseline IDQL
is to demonstrate how the proposed method improves
the quality of the behaviours learned for fully inde-
pendent learners that use only local observations to
learn the tasks. Importantly, we investigate the per-
formances of independent learners and how we can
improve independent learning. Hence, we do not use
the popular parameter sharing convention in MARL
(Gupta et al., 2017) and do not follow the CTDE
paradigm (Lowe et al., 2017). In other words, the
learning process is fully decentralised and indepen-
dent.
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
484
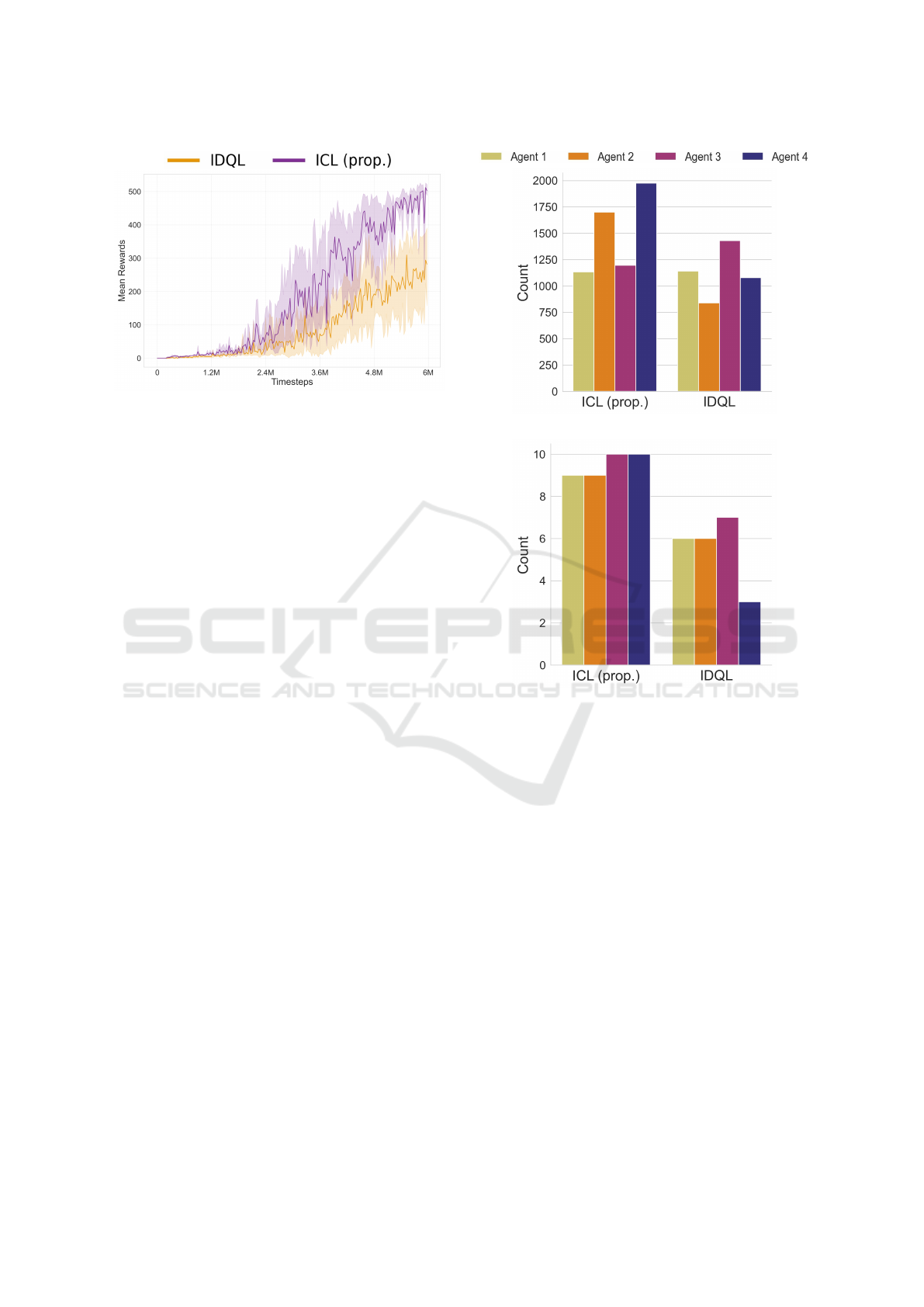
Figure 3: Team rewards obtained for the experimented
Warehouse environment (6 independent runs). The bold
area represents the 95% confidence interval.
4.1 Team Performance and Rewards
Fig. 3 illustrates the results for the Warehouse task,
where ICL achieves a much higher performance. Al-
though IDQL can still achieve an intermediate reward,
it is clear the discrepancy of performance between the
two methods. The sub-optimal reward of IDQL is ex-
plained by insufficient exploration, caused by lack of
cooperation of some agents. As Fig. 3 shows, ICL
encouraged the agents to learn different policies and
hence to cooperate more, leading to an optimal re-
ward that could not be achieved by the fully inde-
pendent learners of IDQL. This means that using a
causality estimator for independent agents to under-
stand whether they have caused the team rewards or
not will benefit the team as a whole, pushing them to
develop more cooperative behaviours and not become
lazy.
4.2 Individual Learned Behaviours
We have seen that the agents trained by ICL with
a causality estimator can achieve higher rewards as
a team in the complex environment experimented.
We now investigate the quality of the individual be-
haviours learned by ICL compared to the purely inde-
pendent learners of IDQL. The aim of this analysis is
to demonstrate how ICL enables independent and in-
dividual agents to learn more intelligent behaviours.
For the results presented in this subsection, we se-
lected trained policies of IDQL and ICL for the ware-
house environment.
As we discuss in detail ahead, Fig. 4a and Fig. 4b
show how the proposed method eliminates lazy agents
in the warehouse task by looking at how much the
agents move during the task and how many boxes they
deliver (contribute to the goal of the team). The dis-
(a)
(b)
Figure 4: Behaviour metrics for ICL vs IDQL in the ex-
perimented environments. From top to bottom: (a) distance
travelled per agent in Warehouse (one successful episode);
(b) boxes delivered per agent in Warehouse (one successful
episode, same as (a)).
crepancy of rewards between IDQL and ICL in Fig.
3 is explained by the existence of agents that do not
cooperate and let the others do the task all by them-
selves. For instance, this can be confirmed in Fig. 4a
that shows how some of the agents trained by IDQL
do not move nearly as much as the agents trained by
ICL. This means that some of them have become lazy
and will not be cooperative with the team, waiting for
the other agents to solve the task for them. They keep
receiving the team reward, but without credit for it.
Additionally, Fig. 4b shows that, while for ICL all
the agents carry roughly the same amount of boxes,
for IDQL some of them almost do not cooperate. As
an example, agent 4 barely participates in the task in
IDQL, carrying almost no boxes during the episode.
As Fig. 3 demonstrates, such non-cooperative indi-
vidual behaviours will be very harmful for the team as
Learning Independently from Causality in Multi-Agent Environments
485

a whole, leading to worst overall outcomes. In addi-
tion, agents with such undesirable behaviours would
not be qualified to be placed together with a new team
of other trained agents. For instance, if we get to train
a couple of agents to solve a certain task and want to
transfer them to a different team to help other agents,
they would not be qualified to do so.
5 CONCLUSION AND FUTURE
WORK
This paper introduced Independent Causal Learning
(ICL), a method for learning fully independent be-
haviours in cooperative MARL tasks that bridges the
concepts of causality and MARL. When there is some
prior knowledge of the environment, a causal rela-
tionship between the individual observations and the
team reward becomes perceptible. This allows the
proposed method to improve learning in a fully de-
centralised and fully independent manner. The re-
sults showed that providing an environment depen-
dent causality estimation allows agents to perform ef-
ficiently in a fully independent manner and achieve a
certain goal as a team. In addition, we showed how
using causality in MARL can improve individual be-
haviours, eliminating lazy agents that are present in
normal independent learners and enabling more in-
telligent behaviours, leading to better overall perfor-
mances in the tasks. These preliminary results are in-
spiring as they enlighten the potential of the link be-
tween causality and MARL.
In the future, we aim to study how causality esti-
mations can be used to also improve centralised learn-
ing. In addition, although the recognition of patterns
that identify causality relations has shown to be chal-
lenging in machine learning methods, we intend to ex-
tend this method to more cases and show that causal-
ity discovery can be generalised to MARL problems.
Furthermore, we intend to study how ICL can be ap-
plied in real scenarios that require online learning and
prohibit excessive trial-and-error episodes due to po-
tentially catastrophic events caused by the learning
agents. We believe that this can be a breakthrough for
online learning in real scenarios where reliable com-
munication or a centralised oracle is not available,
and agents must learn to coordinate independently. At
last, we expect that this link can bring more relevant
research questions to the field of MARL.
ACKNOWLEDGEMENTS
This work was funded by the Engineering and Physi-
cal Sciences Research Council in the United Kingdom
(EPSRC), under the grant number EP/T000783/1.
REFERENCES
Aziz, N. A. (2017). Transfer entropy as a tool for inferring
causality from observational studies in epidemiology.
preprint, Epidemiology.
Barnett, L., Barrett, A. B., and Seth, A. K. (2009). Granger
causality and transfer entropy are equivalent for gaus-
sian variables. Phys. Rev. Lett., 103:238701.
Canese, L., Cardarilli, G. C., Di Nunzio, L., Fazzolari,
R., Giardino, D., Re, M., and Span
`
o, S. (2021).
Multi-Agent Reinforcement Learning: A Review
of Challenges and Applications. Applied Sciences,
11(11):4948.
Glymour, C., Zhang, K., and Spirtes, P. (2019). Review of
causal discovery methods based on graphical models.
Frontiers in Genetics, 10.
Granger, C. W. J. (1969). Investigating causal relations
by econometric models and cross-spectral methods.
Econometrica, 37(3):424–438.
Gupta, J. K., Egorov, M., and Kochenderfer, M. (2017). Co-
operative Multi-agent Control Using Deep Reinforce-
ment Learning. In Sukthankar, G. and Rodriguez-
Aguilar, J. A., editors, Autonomous Agents and Multi-
agent Systems, volume 10642, pages 66–83. Springer
International Publishing, Cham. Series Title: Lecture
Notes in Computer Science.
Hlav
´
a
ˇ
ckov
´
a-Schindler, K., Palu
ˇ
s, M., Vejmelka, M., and
Bhattacharya, J. (2007). Causality detection based on
information-theoretic approaches in time series analy-
sis. Physics Reports, 441(1):1–46.
Huang, X., Zhu, F., Holloway, L., and Haidar, A. (2020).
Causal discovery from incomplete data using an en-
coder and reinforcement learning.
Kipf, T., Fetaya, E., Wang, K.-C., Welling, M., and Zemel,
R. (2018). Neural Relational Inference for Interact-
ing Systems. arXiv:1802.04687 [cs, stat]. arXiv:
1802.04687.
Lowe, R., Wu, Y., Tamar, A., Harb, J., Abbeel, O. P.,
and Mordatch, I. (2017). Multi-Agent Actor-Critic
for Mixed Cooperative-Competitive Environments. In
Proceedings of the 31st International Conference on
Neural Information Processing Systems, pages 6382–
6393.
L
¨
owe, S., Madras, D., Zemel, R., and Welling, M.
(2022). Amortized Causal Discovery: Learning
to Infer Causal Graphs from Time-Series Data.
arXiv:2006.10833 [cs, stat]. arXiv: 2006.10833.
Mnih, V., Kavukcuoglu, K., Silver, D., Rusu, A. A., Ve-
ness, J., Bellemare, M. G., Graves, A., Riedmiller,
M., Fidjeland, A. K., Ostrovski, G., Petersen, S.,
Beattie, C., Antonoglou, I., King, H., Kumaran, D.,
Wierstra, D., Legg, S., Hassabis, D., and Sadik, A.
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
486

(2015). Human-level control through deep reinforce-
ment learning. Nature, 518(7540):529–533.
Oliehoek A., F. and Amato, C. (2016). A Concise Introduc-
tion to Decentralized POMDPs. Springer Publishing
Company, Incorporated, 1st edition.
Peters, J., Janzing, D., and Scholkopf, B. (2017). Elements
of Causal Inference. MIT Press.
Rohrer, J. M. (2018). Thinking Clearly About Correlations
and Causation: Graphical Causal Models for Obser-
vational Data. Advances in Methods and Practices in
Psychological Science, page 16.
Schreiber, T. (2000). Measuring Information Transfer.
Physical Review Letters, 85(2):461–464.
Sgaier, S. K., Huang, V., and Charles, G. (2020). The
case for causal ai. Stanford Social Innovation Review,
18:50–55.
Smirnov, D. A. (2013). Spurious causalities with transfer
entropy. Physical Review E, 87(4):042917.
Sunehag, P., Lever, G., Gruslys, A., Czarnecki, W. M.,
Zambaldi, V., Jaderberg, M., Lanctot, M., Son-
nerat, N., Leibo, J. Z., Tuyls, K., and Graepel, T.
(2018). Value-Decomposition Networks For Coopera-
tive Multi-Agent Learning. In Proceedings of the 17th
International Conference on Autonomous Agents and
MultiAgent Systems, pages 2085– 2087, Stockholm,
Sweden,.
Tampuu, A., Matiisen, T., Kodelja, D., Kuzovkin, I., Kor-
jus, K., Aru, J., Aru, J., and Vicente, R. (2015). Mul-
tiagent Cooperation and Competition with Deep Re-
inforcement Learning. arXiv:1511.08779 [cs, q-bio].
arXiv: 1511.08779.
Tan, M. (1993). Multi-Agent Reinforcement Learning: In-
dependent vs. Cooperative Agents. In Proceedings
of the Tenth International Conference on Machine
Learning, pages 330–337.
Watkins, C. and Dayan, P. (1992). Technical Note Q,-
Learning. In Machine Learning, volume 8, pages
279–292.
Zhu, S., Ng, I., and Chen, Z. (2020). Causal discovery with
reinforcement learning. In International Conference
on Learning Representations.
Learning Independently from Causality in Multi-Agent Environments
487
