
Logic + Reinforcement Learning + Deep Learning: A Survey
Andreas Bueff and Vaishak Belle
University of Edinburgh, U.K.
Keywords:
Logic-Based Reinforcement Learning.
Abstract:
Reinforcement learning has made significant strides in recent years, including in the development of Atari
and Go-playing agents. It is now widely acknowledged that logical syntax adds considerable flexibility in
both the modelling of domains as well as the interpretability of domains. In this survey paper, we cover the
fundamentals of how logic, reinforcement learning, and deep learning can be unified, with some ideas for
future work.
1 INTRODUCTION
Reinforcement learning (RL) has made significant
strides in recent years, including in the development
of Atari and Go-playing agents (Denil et al., 2016;
Foerster et al., 2016; Mnih et al., 2013). It is now
widely acknowledged that logical syntax adds consid-
erable flexibility in both the modelling of domains as
well as the interpretability of domains (Milch et al.,
2005; Hu et al., 2016; Narendra et al., 2018; Graves
et al., 2014). In this survey paper, we cover the fun-
damentals of how logic, reinforcement learning, and
deep learning can be unified, with some ideas for fu-
ture work. In some cases, we go into some depth into
the technical details because the modules depend on
such details.
We begin with a brief review of inductive logic
programming (ILP), the main paradigm we focus on
in this article (Raedt et al., 2016). Although there
are other approaches, such as (Sanner and Kersting,
2010), which uses Partially-observable Markov deci-
sion processes (POMDPs) as a powerful model for
sequential decision-making problems with partially-
observed states, and those that apply satisfiability
(SAT) logical representations in Discrete Hopfield
Neural Networks (DHNN) (Zamri et al., 2022; Guo
et al., 2022; Chen et al., 2023), we focus on ILP be-
cause it allows the learning of rules, a powerful facet
for understanding the policies learned by agents, and
could play an important role in explainable AI (Bhatt
et al., 2020). After discussing the basics of RL, we
will delve into recent advances in extending ILP and
differential ILP, which allows for neural integration in
the learning of logical rules with RL.
2 LOGIC PROGRAMMING
Logic programming is a programming paradigm with
relational logic (Kowalski, 1974), composed of a tu-
ple (R, F) where R is a set of rules and F a set of facts.
This tuple encapsulates an if-then rule. Such rules are
known as clauses and a definite clause is a rule com-
posed of a head atom α and a body α
1
, ··· , α
m
, for-
mally α ← α
1
, ··· , α
m
with rules read from right to
left. In order for α to be true, all atoms to the right
must also be true. An atom α is a tuple p(t
i
, ··· , t
n
)
where p is a predicate with an arity of n in conjunc-
tive normal form (CNF). The body of the predicate is
defined by the terms t
1
, ··· , t
n
which can be variables
or constants. To ground an atom means to have terms
defined by constants (Evans and Grefenstette, 2017).
2.1 ILP
Inductive logic programming (ILP) is a method of
symbolic computing which can automatically con-
struct logic programs provided a background knowl-
edge base (KB) (Muggleton and de Raedt, 1994). An
ILP problem is represented as a tuple (B, P , N ) of
ground atoms, with B defining the background as-
sumptions, P is a set of positive instances which help
in defining the target predicate to be learned, and N
defines the set of negative instances of the target pred-
icate. The aim of ILP is to eventually construct a
logic program that explains all provided positive sets
and rejects the negative ones. Given an ILP problem
(B, P , N ), the aim is to identify a set of hypothe-
ses (clauses) H such that (Muggleton and de Raedt,
1994):
• B ∧H |= γ for all γ ∈ P
• B ∧H 6|= γ for all γ ∈ N
Bueff, A. and Belle, V.
Logic + Reinforcement Learning + Deep Learning: A Survey.
DOI: 10.5220/0011746300003393
In Proceedings of the 15th International Conference on Agents and Artificial Intelligence (ICAART 2023) - Volume 3, pages 713-722
ISBN: 978-989-758-623-1; ISSN: 2184-433X
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
713

Where |= denotes logical entailment. Thus
stating, that the conjunction of the background
knowledge and hypothesis should entail all
positive instances and the same should not
entail any negative instances. We assume
for example a KB with provided constants
{bob, carol, volvo, jacket, pants, skirt, ···}, where
the task is to learn the predicate Passenger(X).
Then the ILP problem is defined as:
• B = {Car( f ord), Clothing( jacket),
On( jacket, bob), Inside(carol, volvo), ···}
• P = {Passenger(bob), Passenger(carol), ···}
• N = {Passenger(volvo),Passenger( jacket),···}
The outcome of the induction performed is a hypoth-
esis of the form:
Passenger(X) ← Inside(X,Y
1
) ∧Car(Y
1
) ∧On(Y
2
, X)
∧Clothing(Y
2
)
The learned first-order logic rule from the KB states
“if an object is inside the car with clothing on it, then
it is a passenger”.
The ILP problem may also contain a language
frame L and program template Π (Evans and Grefen-
stette, 2017). The language frame is a tuple which
contains information on the target predicate, the set
of extensional predicates, the arity of each predicate,
and a set of constants, while the program template de-
scribes the range of programs that can be generated.
2.2 dILP
To make ILP more robust to noise in data, Evans et al.
expanded the framework by making it differentiable
(Evans and Grefenstette, 2017). Doing so provides a
loss function which can be minimised with stochas-
tic gradient descent. Differential inductive logic pro-
gramming (dILP) utilises a continuous interpretation
of semantics where atoms are mapped to values [0,1].
dILP requires a valuation vector [0, 1]
n
with n atoms
which map each ground atom γ ∈ G to a real unit in-
terval. Also defined is an atom label Λ which pairs a
true binary identifier λ to atoms in P (λ = 1) and false
binary to atoms in N (λ = 0).
Provided an ILP problem (L, B, P , N ), a pro-
gram template and class weights W . The differential
model we are trying to solve for an atom α is
p(λ|α,W, Π, L, B) where λ acts as a classification
problem for α. Thus, this sets our goal as minimising
the expected negative log-likelihoods for pairs (α, λ).
loss = −E
(α,λ)∼Λ
[λlog p(λ|α,W, Π, L, B) +
(1 −λ) log p(1 − p(λ|α,W, Π, L, B))]
By forward chaining T steps, we can calculate the
consequences of applying the rules, so-called “Con-
clusion Valuation”. The probability of λ given α is
computed using the auxiliary functions f
exract
, f
in f er
,
f
covert
, and f
generate
. We refer to the literature (Evans
and Grefenstette, 2017) for further details on the cal-
culations of the remaining auxiliary functions.
2.3 dNL
Payani et al. proposed an extension to ILP called dif-
ferentiable neural logic (dNL) networks which utilise
differentiable neural logic layers to learn Boolean
functions (Payani and Fekri, 2019). The concept is
to define Boolean functions that can be combined in a
cascading architecture akin to neural networks. Giv-
ing deep learning an explicit symbolic representation
that is interpretable, and redefines ILP as an optimisa-
tion problem. The dNL architecture uses membership
weights and conjunctive and disjunctive layers with
forward chaining to remove the need for the rule tem-
plate to solve ILP problems.
Payani et al. mapped Boolean values (true =
1, f alse = 0) to real value ranges [0, 1], and defined
fuzzy unary and dual Boolean functions of variables
x and y as follows:
• x = 1 −x
• x ∧y = xy
• x ∨y = 1 −(1 −x)(1 −y)
Given an input vector x
n
into the logical neuron, the
implementation of the conjunction function requires
first selection of a subset of x
n
and applying mul-
tiplication(conjunction) of selected elements. Train-
able Boolean membership weights m
i
are also associ-
ated with each input element x
i
from vector x
n
. The
conjunction function in Equation 1 is defined by the
Boolean function defined in Equation 2 which is able
to include each element in the conjunction function.
f
con j
(x
n
) =
n
∏
i=1
F
c
(x
i
, m
i
) (1)
F
c
(x
i
, m
i
) = x
i
m
i
= 1 −m
i
(1 −x
i
) (2)
By combining different Boolean functions, a
multi-layered structure can be created. For example,
cascading a conjunction function with a disjunction
function( see Equation 3) creates a layer in disjunc-
tion normal form (DNF), so-called dNL-DNF.
f
dis j
(x
n
) = 1 −
n
∏
i=1
(1 −F
d
(x
i
, m
i
)) (3)
F
d
(x
i
, m
i
) = x
i
m
i
(4)
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
714

A dNL conjunction function F
i
p
is associated with
the i
th
rule of intensional predicate p in a logic pro-
gram and the membership weights m
i
act as Boolean
flags to each atom. As membership weights can be
optimised, we find that dNL is similar to dILP. How-
ever, dILP maps Boolean flags to permutations of
two atom sets and only uses the weights to infer the
Boolean flags in selecting a single winning clause.
We refer the reader to (Payani and Fekri, 2019) for
a further description of the forward chaining for eval-
uation.
3 REINFORCEMENT LEARNING
Reinforcement learning (RL) seeks to solve the prob-
lem where an agent is tasked with learning an opti-
mal action sequence to maximise the expected future
reward (Sutton et al., 1998; Rodriguez et al., 2019).
The environment E that an agent operates on is of-
ten modelled as a Markov Decision Process (MDP).
An MDP is defined as a tuple M = hS , A, R , T , Ei
where S is set of states, A is a set of actions that can
be taken, R : S ×A ×S is the reward function which
takes as input the current state s
t
, current action a
t
,
and provides reward from the transition to state s
t+1
,
R (s
t
, a
t
, s
t+1
). T : S ×A ×S is the transition prob-
ability function which represents the probability of
transitioning to state s
t+1
from state s
t
given action
a
t
was taken p(s
t+1
|s
t
, a
t
). E ⊂S are the set of termi-
nal states (Sutton et al., 1998; Leike et al., 2018). A
discount factor γ ∈ [0, 1] states how important it is to
receive a reward in the current state versus the future
state where R
t
=
∑
∞
k=0
γ
k
r
t+k
is the total accumulated
return from the time step. The value function V
π
(τ) =
E
π
[R
t
] of a policy is the measure of the expected sum
of discounted rewards r
t
. The objective is to find the
optimal policy π(s) : S → A to maximise the reward
over time defined by π
∗
= argmax
π
E[
∑
∞
t=0
γ
t
r
t
|s
0
= s]
(Sutton et al., 1998; Rodriguez et al., 2019; Leike
et al., 2018; Roderick et al., 2017; Icarte et al., 2018;
Mnih et al., 2016). This is done by mapping a his-
tory of observations τ
t
= (a
0
, s
0
, a
1
, s
1
, ··· , a
t−1
, s
t
) to
the next action a
t
. In practice, at each time step t, the
agent is in a particular state s
t
∈S , select an action a
t
,
and according to π(·|s
t
), executes a
t
.
Value Based Methods: depend on V
π
to find the
best action to take for each state. This method benefits
from finite states. The Q-function value Q
π
(s, a) =
E[R
t
|s
t
= s, a] under a policy π is the expected return
for selecting action a in state s and following policy π.
The Q-function updates using the Bellman equation,
where the Bellman equation is a fundamental relation-
ship between the value of a state action pair (s,a) and
the value of subsequent state-action pair (s
0
, a
0
) (Sut-
ton and Barto, 2012).
Q
π
(s, a) = r + γE
s
0
,a
0
[Q
π
(s
0
, a
0
)], a
0
v π(s
0
) (5)
Q
∗
(s, a) = arg max
π
Q
π
(s, a) (6)
For deep learning and the Q-function, we parame-
terise the Q function Q(s,a; θ) where the action value
function is represented by a neural network.
Policy Based Methods: seek to directly learn a
policy π
θ
(s), parameterised by θ as opposed to a value
function as in Q-learning. This is useful when the ac-
tion space is continuous or stochastic. Gradient as-
cent on E[R
t
] is done to update the parameters θ for a
parameterised policy π(a|s;θ). REINFORCE is a pol-
icy based algorithm that updates policy parameters θ
in the direction δ
θ
logπ(a
t
|s
t
;θ)R
t
which is an unbi-
ased estimate of δ
θ
E[R
t
]. By subtracting the learned
function of the state, the baseline b
t
(s
t
), it is possible
to reduce the variance of the estimate. The resulting
gradient is δ
θ
logπ(a
t
|s
t
;θ)(R
t
−b
t
(s
t
)) (Sutton et al.,
1998; Mnih et al., 2016).
A mixed approach which takes advantage of both
value and policy-based methods is Actor-Critic where
a learned estimate of the value function is commonly
used as the baseline b
t
(s
t
) = V
π
(s
t
) leading to a lower
variance estimate of the policy gradient. The quan-
tity R
t
−b
t
used in the policy gradient can be seen as
an estimate of the advantage of action a
t
in state s
t
,
or A(a
t
, s
t
) = Q(a
t
, s
t
) −V (s
t
) because R
t
is an esti-
mate of Q
π
(a
t
, st) and b
t
is an estimate of V
π
(s
t
). The
critic estimates the value function which can be either
Q
π
(a, s) or V
π
(s
t
). The actor updates the policy dis-
tribution in the direction suggested by the critic via
policy gradients (Sutton et al., 1998).
A model is the internal representation of the en-
vironment for an agent, and this is often represented
with the transition function T and the reward function
R in an MDP. For RL, the approach with regard to
models is either model-based or model-free. Model-
based methods tasks an RL agent where the model is
input and an agent learns a policy through interact-
ing with the model, so-called planning. The opposite
of planning is seen with the trial and error approach
of model-free which relies on learning state and ac-
tion values to achieve a goal, solely through interact-
ing with the environment (Sutton et al., 1998). While
model-free methods lack sample efficiency from us-
ing a model, they tend to be easier to implement and
tune.
With planning, the agent’s observation of the en-
vironment results in the computation of the optimal
policy with respect to the model. The policy in this
framework describes a series of actions over a fixed
Logic + Reinforcement Learning + Deep Learning: A Survey
715
time window to achieve a goal. The agent executes
the first action of a plan then discards the rest and
sees to it that each interaction with the environment
generates a new plan.
Model-free methods include policy optimisation
methods, where the parameters for a policy are
learned via gradient ascent on the performance ob-
jective J(π
θ
). Here the learning is done on-policy so
each update uses information learned while acting in
accordance with the most recent version of the policy.
Q-learning is the other model-free method which is
off-policy and learns the optimal action-value func-
tion Q
∗
(s, a) so each update uses information col-
lected at any point during training.
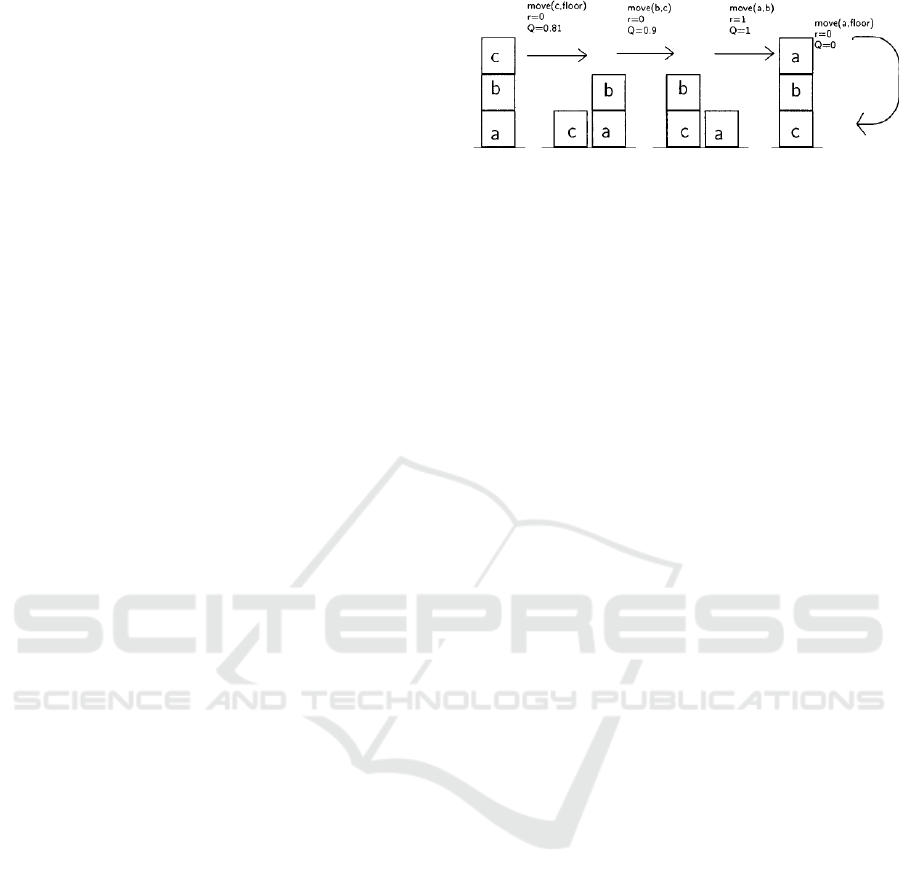
3.1 Relational RL
Relational Reinforcement learning (RRL) seeks to
combine ILP or relational learning with the general
RL framework. RRL has found applications in plan-
ning tasks (model-based) such as the simple block
world task seen in Figure 1. RRL like classic RL is
tasked with learning a policy that provides agents with
the optimum actions to take in a given state. As RRL
integrates ILP, a state is represented relationally as a
set of ground facts. As a symbolic approach, RRL
learns first-order logic (FOL) rules as a policy for a
given task (Driessens, 2010).
As RRL initially was developed for planning
(Driessens, 2010) the block worlds problem was
used as a basis for testing. The objective in
planning problems is to start from a state s and
find a sequence of actions a
i
, ··· , a
n
with a
i
∈
A such that goal((··· , (s, a
1
))··· , a
n−1
) = true and
pre((···(s, a
1
)··· , a
i−1
), a
i
) = true. In the case of
block worlds, say we have 3 blocks called a, b, c on
the f loor, then states can be described by blocks ei-
ther being on each other or the floor, and actions
are represented by move(x, y) where x 6= y and x ∈
{a, b, c}, y ∈ {a, b, c, f loor}. An example state is
given:
s
1
= {clear(a), on(a, b), on(b, c), on(c, f loor)}
The initial work into RRL (Driessens, 2010) used
a modified Q-learning algorithm with a standard
relational learning algorithm (TILDA). Background
knowledge (BK) provides general predicates that can
be used for induction, where predicates are valid for
all training examples. As BK is prior knowledge de-
fined in an expert-defined predicate language, RRL
allows experts to input inductive biases to restrict the
search space. This not only provides policies that are
crafted for the expert’s interpretation but also speeds
up the learning process (Payani and Fekri, 2020).
Figure 1: Relational reinforcement learning in the box
world environment (Driessens, 2010).
RRL provides several benefits over classical RL:
(1) The learned policy is human interpretable and can
be analysed by an expert. (2) The learned RRL policy
is also better able to generalise than policies learned
under classical RL. (3) As the language framework
for defining states and actions is reliant on the expert,
inductive bias can be injected into learning which en-
tails that the expert can control agent behaviour to a
degree. (4) RRL allows for prior background knowl-
edge to act as heuristics in learning (Driessens, 2010;
Payani and Fekri, 2020).
Formally, the task formulation of RRL is given as:
1. States are described relationally using predicates.
2. Actions are described with relational language
such as that in the box world.
When combined with Q-learning, the standard
RRL algorithm uses the stochastic selection of ac-
tions and a relational regression tree. Similarly, the
Q-values are instantiated to zero.
Recent works in RRL have sought to learn end-
to-end in order to avoid the restrictions of regression
trees. In work done by Jiang et al. RRL is extended to
learn FOL policies with policy gradients (Jiang and
Luo, 2019). The authors apply dILP to sequential
decision-making tasks such as the block world task
and cliff walking task.
Taking dILP’s valuation vector e, the authors ex-
pand on its architecture to create so-called Differen-
tial recurrent logic machines (DRLM) which perform
iterative deduction on the valuation vector by taking
the probabilistic sum of possible grounded atoms a
and b, denoted as ⊕ and defined as a⊕b = a+b−a
b, where is the component-wise product. DRLM
treats the valuation produced by the last step deduc-
tion only as input, so the last step of the deduction is
just a function of the initial valuation vector e
0
and
the sum of the deduced valuation. DRLM also ex-
tends the expressiveness of dILP policies by assigning
weights to individual clauses whereas dILP is limited
to combinations of clauses (Jiang and Luo, 2019).
f
t
θ
(e
0
) =
(
g
θ
( f
t−1
θ
(e
0
)), if t ≤ 0
e
0
, if t = 0
(7)
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
716

The deduction of facts e
0
using weights w for in-
dividual clauses is done iteratively. Each iteration de-
composes the valuation vector with a single-step de-
duction function g
θ
as seen in Equation 7 where t is
the deduction step. The single-step deduction func-
tion g
θ
takes in the clause weights and valuation vec-
tor on the clause, as seen in Equation 8.
g
θ
(e) = (
⊕
∑
n
∑
j
w
n, j
F
n, j
(e)) +e
0
(8)
The function F
n, j
performs one step deduction on the
valuation vector e with the j
th
definition of the n
th
clause.
The authors rely on encoders and decoders to
translate first-order atoms to policy valuation and ac-
tionable policy for the agent. The state encoder p
s
:
S →2
G
maps game world states to sets of atoms, and
the decoder p
a
: [0, 1]
|D|
→ [0, 1]
|A|
maps atoms back
to actions. The authors trained their agent using the
REINFORCE algorithm and the design of the encoder
and decoder architecture was done with neural net-
works. In order to ensure the system is differentiable,
they represent the probability of actions based on the
valuations e.
p
A
(a|e) =
(
l(e,a)
σ
, if σ ≥ 1
l(e,a)
σ
+
1−σ
|A|
, if σ < 1
(9)
Here, we have the valuation vector e determining
the value of a given action. The first case is the pro-
portional value of an action where the total sum of the
valuations is over 1, and if the sum of values is less
than one total valuation is evenly distributed to all ac-
tions. The function l : [0, 1]
|D|
×A → [0, 1] maps the
valuation vector to the valuation of that action atom
and σ is the sum of all action valuations
∑
a
l(e, a).
As a model-based approach, Neural Logic Rein-
forcement Learning (NLRL) is limited to learning in
a discrete space. Zambaldi et al. sought to extend
RRL to a model-free and continuous-based setting by
taking advantage of Deep RL and relational learning
(Zambaldi et al., 2019). The authors incorporate re-
lational inductive bias for entity and relation-focused
representations by applying an iterative relational rea-
soning mechanism. In an environment, entities cor-
respond to local regions of an image and the agent
learns the values of certain entities and compares their
interactions with other entities. Visual data is handled
by a convolutional neural network (CNN) front-end
and the agent itself learns with the off-policy A2C al-
gorithm.
For the actor, the policy consists of logits over a
set of possible actions, and the critic generates a base-
line value which is used to calculate the temporal-
difference error to optimise π. As mentioned, input
for the agent is done via a CNN which takes an image
from a game environment and transforms it into an
embedded state representation. Entity vectors E are
computed by transforming an m ×n × f feature ma-
trix to an N × f matrix where (N = m ·n) and where
f represents the number of feature maps. This allows
each row e
i
in E to correspond to a feature vector s
x,y
for any point location x, y in the state image.
The authors tested their framework on the block-
worlds problem and on the popular real-time strategy
(RTS) game Starcraft 2. The lack of a formal ILP
module prevents the policies from being represented
in a FOL language, losing some human interpretabil-
ity. The relational model proposed by the authors is
defined as a stack of multiple relational blocks, and
these blocks perform one-step relational updating us-
ing a shared recurrent neural network (RNN) on un-
shared parameters to derive higher-order entity rela-
tions.
Relational reasoning on the entity interactions is
performed by taking the entity interactions p
i, j
and
updating each entity based on interactions in the gam-
ing environment. The self-attention network, so-
called multi-head dot-product attention (MHDPA),
projects the entities E into matrices query (Q), key
(K), and value (V ) to compute the similarities. The
dot product is taken for a query q
i
and all keys k
j=1:N
,
which are then normalised via a softmax function into
attention weights w
i
.
The pairwise interactions are computed using the
attention weights and value matrix p
i, j
= w
i, j
v
j
. The
equation 10 defines the transformation performed to
derive the accumulated interactions with d defining
the number of dimensions of the Q and K matrices
(N ×d).
A = so f tmax
QK
T
√
d
V (10)
Updates to the entities E
0
is done via a multi-layer
perception (MLP) g
θ
which takes as input the accu-
mulated interactions e
0
= g
θ
(a
h=1:H
i
).
Another approach for end-to-end learning with
model-based agents is the work by Dong et al. In their
work they develop so-called, Neural Logic Machines
(NLM), for a variety of relational reasoning tasks in-
cluding the RRL setting of the block worlds problem
(Dong et al., 2019). Like NLRL, NLM is able to
learn lifted rules from a policy which are generalis-
able and handle high-order relational data, for exam-
ple, the transitional rule r(a, c) ← ∃b r(a, b) ∧r(b, c)
where reasoning is performed on objects (a, b, c). An-
other common issue addressed in this work is that of
ILP’s issue with scaling. In (Yang and Song, 2019),
Logic + Reinforcement Learning + Deep Learning: A Survey
717

MLPs for NLRL act as decoders/encoders while in
the following work, MLPs are integrated into the rule
evaluation and generation process.
The logical framework of ILP is refactored as so-
called logic predicate tensors. The NLM architec-
ture allows for neural-symbolic realisations of Horn
clauses in FOL. A Horn clause is a clause with at most
one positive literal such that a rule ˆp ← p
1
(x) ∧p
2
(x)
implies ∀ ˆp ← p
1
(x) ∧ p
2
(x). Using MLPs, an NLM
is able to learn logical operations such as AND and
OR. NLMs take as input a KB comparing base pred-
icates and variable objects. NLMs apply FOL rules
to draw conclusions using tensors to represent logic
predicates. Predicates are grounded with permuta-
tions of possible variable input and evaluated as being
true or false. The grounded predicates are represented
by logic tensors and implemented by neural operators
for a sequential logic deduction. The final output is a
set of generalisable rules which contain the probabil-
ity of variables and their relations.
The authors combine a probabilistic view on a log-
ical predicate with their so-called U-grounding tensor
p
u
provided a set of variables U = {u
1
, u
2
, ··· , u
m
},
and predicates p(x
1
, x
2
, ··· , x
r
)-arity r, which can be
grounded as a tensor of size [m
ˆr
] where m
ˆr
is de-
fined as [m, m −1, m −2, ··· , m −r + 1]. The prop-
erties of a variable are defined here as unary predi-
cates “moveable(x)”, relations of predicates are de-
fined as a binary predicate “on(x, y)”, and global prop-
erties are nullary predicates “allmatched()”. The
grounding of each entity p
u
(u
i1
, u
i2
, ··· , u
ir
) repre-
sents whether p is true provided a given instantiation.
The authors extend this representation of a logic
predicate p
u
by stacking them, they define C
(r)
to be
the number of predicates of arity r. This creates a
tensor of size [m
ˆr
,C
(r)
]. NLM applies a probabilis-
tic interpretation by taking each ground predicate and
deriving a likelihood ∈ [0, 1] for being true.
The modules of the architecture are reliant on
select meta-rules. (1) Boolean logic rules for op-
erations AND, OR, NOT and (2) quantifications
which link predicates of different arities via logic
quantifiers (∀, ∃). The neural Boolean logic rule
is predicate logic in the form ˆp(x
1
, x
2
, ··· , x
r
) ←
expression(x
1
, x
2
, ··· , x
r
) and can be defined as an ex-
ample moveable(x) ← ¬isground(x) ∧clear(x). In
the context of NLM, provided a set of predicates
P = {p
1
, p
2
, ··· , p
k
} with all the same arity, they can
be stacked as a tensor of shape [m
ˆr
, |P|] with arbitrary
permutations of potential groundings. An MLP takes
as input all the permutations of p
u
i
to create r! tensors
with shape [m
ˆr
, r! ×|P|] as well as trainable parame-
ters θ. A sigmoid is applied to the MLP to derive the
likelihood of a specific predicate.
The neural quantifiers are defined by two rules, (1)
Expansion which constructs a new predicate q from p
by introducing a new variable x
r+1
, where x
r+1
is not
a previous variable in the body of the predicate:
∀x
r+1
q(x
1
, x
2
, ··· , x
r
, x
r+1
) ← p(x
1
, x
2
, ··· , x
r
) (11)
The Expand() method, given a set of C r-arity
predicates with a shape [m
r
,C], expands the logic
predicate tensor by the addition of a distinct variable
x
r+1
. The additional dimension to the tensor creates a
shape [m
ˆ
r+1
,C]. The second rule is reduction, where
using either the ∀, ∃ quantifier, reduces the arity of a
body request by marginalising over a given variable.
q(x
1
, x
2
, ··· , x
r
) ← ∀x
r+1
p(x
1
, x
2
, ··· , x
r
, x
r+1
) (12)
The implementation Reduce() is just the reverse
architecture of Expand() where given a [m
ˆ
r+1
,C]
shaped tensor with a set of C
(r+1)
-arity predicates re-
duces the tensor along the x
r+1
dimension by taking
the max and min and stacking the resulting tensors for
a dimension of [m
ˆr
, 2C].
The authors combine these meta-rules to create
the formal NLM, comprising D layers with B + 1
computations per layer. NLM computes one split
into two distinct computational phases. Provided an
input layer O
i−1
to produce the output layer O
i
=
{O
(0)
i
, O
(1)
i
, ··· , O
(B)
i
}. The inter-group computation
relies on Equation 11 and 12 which takes in tensors
from say layer i and connects the previous layer i −1
into vertically neighbouring groups of arity r, r + 1,
etc. Aligning of the dimensions is done by Reduce()
or Expand() to form the tensor I
(r)
i
.
I
(r)
i
= Concat(Expand(O
(r−1)
i−1
), O
(r)
i−1
, Reduce(O
r+1
i−1
))
(13)
This addresses the issue of the aligning predicates of
the proximal arities and different orders.
Intra-group computation takes the tensor from the
inter-group computation I
(r)
i
and permutes the predi-
cate inputs to produce the output tensor O
i
(r). The
final output shape of the tensor is [m
ˆr
,C
(r)
i
].
O
(r)
i
= σ(MLP(Permute(I
(r)
i
;θ
i
(r))). (14)
Taking the concepts of dNL (Section 2.3), Payani
et al. combine their dNL framework with RL (Payani
and Fekri, 2020). Like NLRL, the author test on the
block world gaming environment and take advantage
of the declarative bias with provided BK. The authors
seek to expand RRL to handle complex scene inter-
pretations similarly to standard deep RL. Payani et
al. take their dNL-ILP differentiable deductive engine
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
718

to give RRL an end-to-end learning framework, so-
called dNL-RRL. This allows for a deep RL approach
with ILP. The authors focus on-policy gradients in or-
der to improve interpretability and also regression in
the form of expert constraints.
RRL has been limited in the past by non-
differentiable ILP (Muggleton and De Raedt, 1994),
so we have seen an overreliance on explicit relational
representations of states and actions in the BK. Hav-
ing differentiable ILP with the dNL-ILP engine al-
lows an RRL agent to learn from raw pixels to extract
low-level relational representations from CNNs. The
authors made significant changes to the original RRL
algorithm with regard to the state representation, lan-
guage bias, and action representation.
In the first case, state representations, the objec-
tive is to take advantage of dNL-ILP for policy learn-
ing by extracting explicit state representations via
deep learning methods. The authors propose first pro-
cessing raw images with CNNs and having the last
layer act as a feature vector which can contain info
such as pixel point position (x, y). Then feed the fea-
ture map into a relational unit to extract non-local fea-
tures (this approach is similar to that seen with (Zam-
baldi et al., 2019)), however, they do not rely on graph
networks instead seeking explicit predicates for ILP).
Three strategies are implemented for learning the
desired relational states from raw input. Where lower-
level state representations are first learned by CNNs
trained on the raw input, followed by the abstraction
to higher-level representations. For example, a high-
level predicate on(X,Y ) can be defined by position
predicates posH(X ,Y) and posV (X,Y) for X repre-
senting the block and Y the coordinates with posH
referring to the horizontal axis and posV the vertical
axis. The second strategy is state constraints, which
rely on the regularisation of the loss function and
connects to logic constraints for relational reasoning.
This requires the modeller to define what heuristics to
constrain. For example, posV ( f loor) should always
be zero. The third strategy is a semi-supervised set-
ting, where the modeller provides input which defines
certain states with labels to aid the agent in learning.
This information is added to the loss function as well.
The action representation is handled by having the
action probability distribution mapped to the ground-
ing of true predicates, for example, move(X,Y ) infer-
ring possible permutations of move(X,Y ) that are true
in a given state. In the case of multiple true predicates
of move(X,Y ), the probability distribution can be esti-
mated by applying a softmax function to the valuation
vector on the learned predicate move.
Outside of RRL, other avenues seeking to com-
bine RL with symbolic learning or explanations have
also been explored. Similar to the abstraction ap-
proach of Payani et al., Verma et al. also pur-
sued a similar approach in their contribution (Verma
et al., 2018), where the authors present Programmat-
ically Interpretable Reinforcement Learning (PIRL)
and Neurally Directed Program Search (NDPS). PIRL
is able to present policies in a human-readable lan-
guage, not unlike the dNL-ILP policies. The parame-
ters of PIRL include a high-level programming lan-
guage to define policies. These parameters infer a
policy(sketch) which defines the declarative language
for an RL problem in a high-level format. The ideal
policy(sketch) uses a language to maximise long-
term reward. The primary benefits of PIRL’s lan-
guage are first the interpretable output, followed by
encoding the modeller’s bias, effective pruning of un-
desired policies, and then a symbolic program verifi-
cation method analogous to ILP. The authors also pro-
pose NDPS which uses Deep RL to compute a high-
performing yet non-interpretable policy in an RL en-
vironment. Inspired by imitation learning (Ho and
Ermon, 2016), the authors take the high-performing
policy and treat it as an oracle for searching out an in-
terpretable policy defined by PIRL. An interpretable
policy is iteratively selected to minimise the output
difference between the high-performance policy and
itself.
An older approach by Garnel et al. establishes the
neural back-end and symbolic front-end framework
seen so far (Garnelo et al., 2016). The authors com-
bine deep learning with classical symbolic AI, inte-
grating symbolic elements such as constants, func-
tions, and predicates. Garnele et al. note the limi-
tation of declarative bias in instantiating symbolic se-
mantics for an RL agent to interpret. The back-end
works similarly to an auto-encoder to compress raw
perceptional data to be fed as input to the symbolic
front-end which maps the inputs to actions. The au-
thors also propose a set of principles, which are rel-
evant to all research with regard to symbolic RL. (1)
Conceptual abstraction which determines whether a
new situation is similar to past experiences and can
a connection be drawn. (2) Compositional struc-
ture which is a representational medium that has a
set of elements that can be recompiled in an open-
ended manner such as probabilistic FOL. (3) Com-
mon sense priors are the minimal assumptions and
expectations that can be built into the learning pro-
cedure and (4) Causal reasoning which attempts to
discover the causal structure of the domain and ex-
press them through the common sense ontology pro-
vided. This work was further extended by Garcez
et al. (d’Avila Garcez et al., 2018) by providing
heuristics to the common sense principle, so-called
Logic + Reinforcement Learning + Deep Learning: A Survey
719

principle one which only updates agent and object
interaction states based on Q values only when the
rewards are non-zero and principle two which takes
into account the relational position of an object to an
agent as a factor for an action selection.
In (Martires et al., 2020), real-world perception in
an RL setting was researched where a semantic world
modelling approach via detecting, segmentation, and
processing perceived objects from visual input and
then applying an anchoring system to maintain con-
sistent representations (anchor) of perceived objects.
The pipeline ends with an inference system to self-
check the anchoring system and for logically tracking
objects in a dynamic setting. Predicate logic is used
as the language for relational representation.
In (Li et al., 2019), the graph network approach
to real-world robotics tasks is also interesting to note.
Graph networks provide an alternative to ILP since
graph structures are suitable for an object-oriented en-
vironment and can model relational relationships be-
tween objects. Li et al. have an agent train with
an attention-based graph neural network (GNN) to
handle curriculum learning with multi-object environ-
ments and have the number of objects increase as the
agent learns.
Other works have provided a testing bed for RRL
research such as the works by Silver et al. (Silver
and Chitnis, 2020). The authors bridge the research
environment Open AI Gym (Brockman et al., 2016)
with planning domains in Planning Domain Defini-
tion Language (PDDL) which allows for testing of RL
interpretability.
Zhang et al. combine high-level symbolic rules
and deep Q-learning (DQN), treating rules defined in
a knowledge background as intuitive heuristics such
as “slow down when you approach curve” (Zhang
et al., 2019). The authors proposed so-called, Rule-
interposing Learning (RIL), which has a deep learn-
ing component. An agent queries the KB for appro-
priate actions in addition to Q values and decides what
action is appropriate. The KB aids the DQN in prun-
ing the actions that are unsafe or unnecessary. The KB
acts as an independent module, as opposed to (Gar-
nelo et al., 2016), which relies on the end-to-end RL
architecture with neural back-end and symbolic front-
end.
Saebi et al. address the issue of knowledge graph
(KG) completion, and problems of inferring missing
relations in their work (Saebi et al., 2020). A real-
world KG can contain exponential numbers of entity
relations, overburdening an RL agent. The authors
propose a representation of the state space which in-
cludes entity-type information. They then use a prun-
ing algorithm to limit searches made by an agent in
the action space. Similarly (Li et al., 2019), the au-
thors use GNNs to encode neighbourhood informa-
tion.
Sreedharan et al. research into RRL explore so-
called, Expectation-aware planning, which includes a
‘human in the loop’ for agent learning. The authors
propose self-explaining plans which contain actions
that are responsible for explaining the plan in an inter-
pretable manner and seek to include agent behaviour
acting in accordance with human expectation (Sreed-
haran et al., 2019).
Pacheo et al. seek to combine GNNs and end-to-
end learning of deep learning in their seminal work
(Pacheco et al., 2018). The authors present DRail,
a declarative modelling language which consists of
rules sets with factor templates over variables. Rules
in the framework have an associated neural architec-
ture to learn a scoring function and feature definition.
A unique application, Lederman et al. rely on
graph networks and relational RL, primarily for solv-
ing quantified Boolean logics and returning proofs.
Here they utilise a GNN to predict the quality of
each variable as a decision variable to select an action
and use end-to-end learning to improve reasoning on
given sets of formulas (Lederman et al., 2018).
4 CONCLUSIONS
In this survey paper, we studied the various dimen-
sions and some technical foundations for logic + rein-
forcement learning + deep learning. There is a grow-
ing body of work on logic and deep learning (Garcez
et al., 2015), and this survey pushes the area further
by looking at dynamic domains. In an extended re-
port, we also discuss advances in inverse RL (Ng and
Russell, 2000) and its integration with ILP.
ACKNOWLEDGEMENTS
This research was partly supported by a Royal Soci-
ety University Research Fellowship, UK, and partly
supported by a grant from the UKRI Strategic Priori-
ties Fund, UK to the UKRI Research Node on Trust-
worthy Autonomous Systems Governance and Regu-
lation (EP/V026607/1, 2020–2024).
REFERENCES
Bhatt, U., Xiang, A., Sharma, S., Weller, A., Taly, A., Jia,
Y., Ghosh, J., Puri, R., Moura, J. M. F., and Eckersley,
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
720

P. (2020). Explainable machine learning in deploy-
ment. Proceedings of the 2020 Conference on Fair-
ness, Accountability, and Transparency.
Brockman, G., Cheung, V., Pettersson, L., Schneider, J.,
Schulman, J., Tang, J., and Zaremba, W. (2016). Ope-
nai gym. CoRR, abs/1606.01540.
Chen, J., Kasihmuddin, M. S. M., Gao, Y., Guo, Y., Asyraf
Mansor, M., Romli, N. A., Chen, W., and Zheng, C.
(2023). Pro2sat: Systematic probabilistic satisfiability
logic in discrete hopfield neural network. Advances in
Engineering Software, 175:103355.
d’Avila Garcez, A. S., Dutra, A. R. R., and Alonso, E.
(2018). Towards symbolic reinforcement learning
with common sense. CoRR, abs/1804.08597.
Denil, M., Agrawal, P., Kulkarni, T. D., Erez, T., Battaglia,
P., and de Freitas, N. (2016). Learning to perform
physics experiments via deep reinforcement learning.
Dong, H., Mao, J., Lin, T., Wang, C., Li, L., and
Zhou, D. (2019). Neural logic machines. CoRR,
abs/1904.11694.
Driessens, K. (2010). Relational Reinforcement Learning,
pages 857–862. Springer US, Boston, MA.
Evans, R. and Grefenstette, E. (2017). Learning explanatory
rules from noisy data. CoRR, abs/1711.04574.
Foerster, J. N., Assael, Y. M., de Freitas, N., and Whiteson,
S. (2016). Learning to communicate with deep multi-
agent reinforcement learning.
Garcez, A., Besold, T., De Raedt, L., F
¨
oldi
´
ak, P., Hitzler, P.,
Icard, T., K
¨
uhnberger, K.-U., Lamb, L., Miikkulainen,
R., and Silver, D. (2015). Neural-symbolic learning
and reasoning: Contributions and challenges.
Garnelo, M., Arulkumaran, K., and Shanahan, M.
(2016). Towards deep symbolic reinforcement learn-
ing. CoRR, abs/1609.05518.
Graves, A., Wayne, G., and Danihelka, I. (2014). Neural
turing machines.
Guo, Y., Kasihmuddin, M. S. M., Gao, Y., Mansor, M. A.,
Wahab, H. A., Zamri, N. E., and Chen, J. (2022).
Yran2sat: A novel flexible random satisfiability logi-
cal rule in discrete hopfield neural network. Advances
in Engineering Software, 171:103169.
Ho, J. and Ermon, S. (2016). Generative adversarial imita-
tion learning. In Lee, D. D., Sugiyama, M., Luxburg,
U. V., Guyon, I., and Garnett, R., editors, Advances
in Neural Information Processing Systems 29, pages
4565–4573. Curran Associates, Inc.
Hu, Z., Ma, X., Liu, Z., Hovy, E. H., and Xing, E. P.
(2016). Harnessing deep neural networks with logic
rules. CoRR, abs/1603.06318.
Icarte, R. T., Klassen, T., Valenzano, R., and McIlraith,
S. (2018). Using reward machines for high-level
task specification and decomposition in reinforcement
learning. In Dy, J. and Krause, A., editors, Pro-
ceedings of the 35th International Conference on Ma-
chine Learning, volume 80 of Proceedings of Ma-
chine Learning Research, pages 2107–2116, Stock-
holmsm
¨
assan, Stockholm Sweden. PMLR.
Jiang, Z. and Luo, S. (2019). Neural logic reinforcement
learning.
Kowalski, R. A. (1974). Predicate logic as programming
language. In IFIP Congress, pages 569–574.
Lederman, G., Rabe, M. N., Lee, E. A., and Seshia, S. A.
(2018). Learning heuristics for quantified boolean for-
mulas through deep reinforcement learning.
Leike, J., Krueger, D., Everitt, T., Martic, M., Maini,
V., and Legg, S. (2018). Scalable agent alignment
via reward modeling: a research direction. CoRR,
abs/1811.07871.
Li, R., Jabri, A., Darrell, T., and Agrawal, P. (2019). To-
wards practical multi-object manipulation using rela-
tional reinforcement learning.
Martires, P. Z. D., Kumar, N., Persson, A., Loutfi, A., and
Raedt, L. D. (2020). Symbolic learning and reasoning
with noisy data for probabilistic anchoring.
Milch, B., Marthi, B., Russell, S. J., Sontag, D., Ong, D. L.,
and Kolobov, A. (2005). BLOG: Probabilistic models
with unknown objects. In Proc. IJCAI, pages 1352–
1359.
Mnih, V., Badia, A. P., Mirza, M., Graves, A., Lillicrap,
T. P., Harley, T., Silver, D., and Kavukcuoglu, K.
(2016). Asynchronous methods for deep reinforce-
ment learning.
Mnih, V., Kavukcuoglu, K., Silver, D., Graves, A.,
Antonoglou, I., Wierstra, D., and Riedmiller, M.
(2013). Playing atari with deep reinforcement learn-
ing.
Muggleton, S. and de Raedt, L. (1994). Inductive logic pro-
gramming: Theory and methods. The Journal of Logic
Programming, 19-20:629 – 679. Special Issue: Ten
Years of Logic Programming.
Muggleton, S. and De Raedt, L. (1994). Inductive logic
programming: Theory and methods. The Journal of
Logic Programming, 19:629–679.
Narendra, T., Sankaran, A., Vijaykeerthy, D., and Mani, S.
(2018). Explaining deep learning models using causal
inference. CoRR, abs/1811.04376.
Ng, A. Y. and Russell, S. J. (2000). Algorithms for inverse
reinforcement learning. In Proceedings of the Seven-
teenth International Conference on Machine Learn-
ing, ICML ’00, page 663–670, San Francisco, CA,
USA. Morgan Kaufmann Publishers Inc.
Pacheco, M. L., Dalal, I., and Goldwasser, D. (2018).
Leveraging representation and inference through deep
relational learning. NeurIPS Workshop on Relational
Representation Learning.
Payani, A. and Fekri, F. (2019). Inductive logic program-
ming via differentiable deep neural logic networks.
CoRR, abs/1906.03523.
Payani, A. and Fekri, F. (2020). Incorporating relational
background knowledge into reinforcement learning
via differentiable inductive logic programming.
Raedt, L. D., Kersting, K., Natarajan, S., and Poole, D.
(2016). Statistical relational artificial intelligence:
Logic, probability, and computation. Synthesis Lec-
tures on Artificial Intelligence and Machine Learning,
10(2):1–189.
Roderick, M., Grimm, C., and Tellex, S. (2017). Deep ab-
stract q-networks.
Logic + Reinforcement Learning + Deep Learning: A Survey
721

Rodriguez, I. D. J., Killian, T. W., Son, S., and Gombolay,
M. C. (2019). Interpretable reinforcement learning via
differentiable decision trees. CoRR, abs/1903.09338.
Saebi, M., Krieg, S., Zhang, C., Jiang, M., and Chawla, N.
(2020). Heterogeneous relational reasoning in knowl-
edge graphs with reinforcement learning.
Sanner, S. and Kersting, K. (2010). Symbolic dynamic
programming for first-order pomdps. In Proc. AAAI,
pages 1140–1146.
Silver, T. and Chitnis, R. (2020). Pddlgym: Gym environ-
ments from pddl problems.
Sreedharan, S., Chakraborti, T., Muise, C., and Kambham-
pati, S. (2019). Planning with explanatory actions: A
joint approach to plan explicability and explanations
in human-aware planning. CoRR, abs/1903.07269.
Sutton, R. S. and Barto, A. G. (2012). Reinforcement Learn-
ing: An Introduction. The MIT Press.
Sutton, R. S., Barto, A. G., et al. (1998). Introduction to
reinforcement learning, volume 135. MIT press Cam-
bridge.
Verma, A., Murali, V., Singh, R., Kohli, P., and Chaudhuri,
S. (2018). Programmatically interpretable reinforce-
ment learning. CoRR, abs/1804.02477.
Yang, Y. and Song, L. (2019). Learn to explain efficiently
via neural logic inductive learning.
Zambaldi, V., Raposo, D., Santoro, A., Bapst, V., Li, Y.,
Babuschkin, I., Tuyls, K., Reichert, D., Lillicrap,
T., Lockhart, E., Shanahan, M., Langston, V., Pas-
canu, R., Botvinick, M., Vinyals, O., and Battaglia,
P. (2019). Deep reinforcement learning with rela-
tional inductive biases. In International Conference
on Learning Representations.
Zamri, N. E., Azhar, S. A., Sidik, S. S. M., Mansor, M. A.,
Kasihmuddin, M. S. M., Pakruddin, S. P. A., Pauzi,
N. A., and Nawi, S. N. M. (2022). Multi-discrete
genetic algorithm in hopfield neural network with
weighted random k satisfiability. Neural Computing
and Applications, 34(21):19283–19311.
Zhang, H., Gao, Z., Zhou, Y., Zhang, H., Wu, K., and Lin, F.
(2019). Faster and safer training by embedding high-
level knowledge into deep reinforcement learning.
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
722
