
On the Future of Training Spiking Neural Networks
Katharina Bendig
1,2
, Ren
´
e Schuster
2
and Didier Stricker
1,2
1
Technische Universit
¨
at Kaiserslautern, Germany
2
DFKI – German Research Center for Artificial Intelligence, Germany
{firstname.lastname}@dfki.de
Keywords:
Spiking Neural Networks, Surrogate Gradients, Supervised Training, ANN2SNN, Conversion.
Abstract:
Spiking Neural Networks have obtained a lot of attention in recent years due to their close depiction of brain
functionality as well as their energy efficiency. However, the training of Spiking Neural Networks in order
to reach state-of-the-art accuracy in complex tasks remains a challenge. This is caused by the inherent non-
linearity and sparsity of spikes. The most promising approaches either train Spiking Neural Networks directly
or convert existing artificial neural networks into a spike setting. In this work, we will express our view on
the future of Spiking Neural Networks and on which training method is the most promising for recent deep
architectures.
1 INTRODUCTION
Deep Learning (DL) is becoming more and more in-
fluential both in our current daily lives as well as in
future research. There have been remarkable achieve-
ments in a variety of application areas, such as com-
puter vision (Krizhevsky et al., 2012), text process-
ing (Vaswani et al., 2017), autonomous driving (Chen
et al., 2017) and robotics (Andrychowicz et al., 2019).
Unfortunately, as the complexity of the applica-
tions grows, so does the size of the neural network
and the energy resources required during training and
inference. This leads not only to a higher carbon foot-
print but also to limited applicability on mobile de-
vices. It has been shown that costs grow roughly in
proportion to the demand for computing power, so we
are inevitably heading towards the point where DL is
no longer sustainable (Thompson et al., 2021). On
the other hand, the brain uses only a fraction of the
resources compared to a computer while performing
comparable or even more complex tasks and addition-
ally managing general functions of the body (Bala-
subramanian, 2021). This demonstrates that a great
deal of optimization and innovation is still required to
truly exploit the full potential of DL and neural archi-
tectures.
One possible approach is the usage of Spik-
ing Neural Networks (SNNs) (Gerstner and Kistler,
2002), which depict the biological functionality of
the brain more closely than traditional Artifical Neu-
ral Networks (ANNs). Spiking neurons communicate
by means of spikes, which can be represented solely
on the basis of ones and zeros. Therefore, theoreti-
cally no multiplications with synaptic weights like in
ANNs are necessary. The multiplication with zero re-
sults automatically in zero and a multiplication with
one in the weight itself, which only requires a single
memory read-out. Additionally, the inherent sparsity
of the spikes leads to a generally decreased amount of
computations in the network, since only the arrival of
spikes induces computations in the neuron. For these
reasons SNNs have the advantage of a lower energy
consumption during inference and training compared
to ANNs.
In theory, SNNs have been shown to possess
the same expressive power as ANNs (Maass and
Markram, 2004). However, practically there are still
many hindrances in the training of SNNs, so that in
the majority of cases they cannot reach the perfor-
mance capability of ANNs at the time being.
There are generally three ways to obtain a trained
SNN: Biological, conversion from a pre-trained
ANN, and direct training. The biological approach
typically leads to local optimization rules that are dif-
ficult to extend to deep networks, (Nunes et al., 2022).
This can be avoided by utilizing an existing ANN and
converting it into a SNN, since this principle can be
applied to a variety of modern architectures (Rueck-
auer et al., 2017). However, restrictions are often im-
posed on the ANN and the conversion is in any case
an approximation, so that the resulting SNN usually
suffers from lower performance. There are also ob-
stacles associated with the direct training, since the
spiking functional is non-differentiable and thus the
466
Bendig, K., Schuster, R. and Stricker, D.
On the Future of Training Spiking Neural Networks.
DOI: 10.5220/0011745500003411
In Proceedings of the 12th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2023), pages 466-473
ISBN: 978-989-758-626-2; ISSN: 2184-4313
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

successful gradient descent method is not directly ap-
plicable.
In this work, we will explore and compare
the advantages and disadvantages of these training
paradigms especially with regard to their use in fu-
ture real-world applications. This encompasses their
practicality in very deep neural networks as well as
their applicability for complex datasets. We are con-
vinced, that the future of SNNs lies in the direct train-
ing, due to its capability to train deep networks, its
greater variability concerning the encoding of input
data and its consideration of internal temporal rela-
tionships of SNNs.
2 RELATED WORK
2.1 Spiking Neural Networks
The general architecture of SNNs is analogous to the
structure of ANNs (Gerstner and Kistler, 2002). The
crucial difference lies in the functionality of the spik-
ing neurons, which implement biological processes in
a more detailed way. Spiking neurons have a mem-
brane potential U that grows in response to exter-
nal stimuli. If a certain threshold θ is exceeded, the
neuron fires and thus transmits a spike via outgo-
ing synapses. However, since it is very improbable
that all spikes arrive at a neuron simultaneously, there
are additional temporal dynamics, which maintain the
membrane potential over a short period of time.
In experiments on nerves in frogs, these dynam-
ics were found to be comparable to those in a simple
resistor–capacitor circuit (Brunel and van Rossum,
2007). Inspired by this, the simple Leaky Integrate-
and-Fire (LIF) neuron model is nowadays often used
in DL implementations for SNNs. A discrete approx-
imation of the LIF model can be described in the fol-
lowing way (Wu et al., 2019):
U[t] = βU [t − 1]
| {z }
decay
+W X[t]
|{z}
input
−S
out
[t − 1]θ
| {z }
reset
, (1)
with β as the decay rate of the membrane potential,
W X[t] as the weighted input spikes and S
out
[t] ∈ {0, 1}
as the generated output spike. The exponential de-
cay of the membrane potential sustains the incoming
spike information for a short amount of time, while
also preserving the non-correlation between spikes
at too distant time steps. Especially when ANNs
are converted to SNNs, this decay is often disre-
garded which results in the Integrate-and-Fire (IF)
neuron model. Furthermore, in case the neuron fires
the membrane potential gets reset by subtracting the
threshold. Outgoing spikes are generated, when the
membrane potential reaches the threshold:
S
out
[t] =
(
1, if U[t] > θ
0, otherwise.
(2)
However, this functionality is non-differentiable,
meaning that gradient descent is not applicable as in
conventional ANNs. For this reason, the training of
SNNs is still an ongoing research topic.
2.2 Data Handling
Since the calculations in SNNs are based on spikes,
input data such as intensity values in images must be
converted to a spike format. This is especially rel-
evant in the context of converting ANNs, since the
input encoding needs to abide certain restriction for
the converted SNN, which will be further explained
in Section 2.3. The two main approaches for encod-
ing floating points into spikes are temporal and rate
encoding.
The temporal encoding stores the information
within the timing of a single spike. For image data
this means that a high pixel intensity is encoded in an
earlier spike, while a low intensity pixel is mapped to
a later spike. In addition, a logarithmic mapping is ap-
plied to mimic processes in the retina (Dehaene, 2003;
Arrow et al., 2021). The main advantage of temporal
encoding is the low energy consumption, since the in-
put data is extremely sparse and thus requires minimal
computations and memory access. However at the
same time, the sparsity leads to an insufficient amount
of training signals and can therefore result in dead
neurons. Furthermore, this encoding has a poor er-
ror tolerance, since similar classes can fire at the same
time and no additional time step is taken into account
in order to compensate for this. Additionally, it re-
mains ambiguous which property should be described
by an earlier spike time. A high intensity pixel, for
example, may only describe background information
of an image and therefore initially provide little infor-
mation to the neural network. This becomes particu-
larly problematic with more complex input data and
has been insufficiently addressed, as most approaches
have only considered simple datasets such as MNIST
(Lecun et al., 1998).
Rate coding on the other hand stores the infor-
mation in the number of spikes N over a period of
time. Accordingly, in the most common rate coding
scheme, the average firing rate v over the time win-
dow T can be defined as follows:
v =
N
T
. (3)
On the Future of Training Spiking Neural Networks
467

This is typically modeled with a Poisson distribution
with a mean event rate proportional to the normalized
pixel intensity (Nunes et al., 2022). The occurrence of
rate coding in biological processes has been demon-
strated in several studies, (Adrian and Zotterman,
1926). It has the advantage of having a high error
tolerance, since numerous incoming spikes can excite
a neuron that previously failed to fire. Furthermore,
in output neurons, subsequent output spikes can com-
pensate for errors and make it easier to distinguish
classes. In addition, a large number of spikes leads
to many training signals and accordingly a stronger
gradient signal. However, this results in a trade-off
in terms of higher energy consumption and training
time due to increased computational operations. Rate-
coding is especially important for conversion algo-
rithms. These methods create SNNs based on pre-
trained ANNs based on the assumption, that the in-
put data will be fed into the converted SNN in a rate-
coded manner.
Recently, several SNN methods have started to use
the direct encoding scheme (Zenke and Vogels, 2021),
in which the floating point values of the input data are
fed directly into the network. This means that the first
neuron layer is used to convert these values into spikes
and thus adopt the functionality of body sensors. The
advantage of this approach is that the encoding does
not have to be explicitly predefined in a manual man-
ner and is instead learned by the network.
Biologically, different types of information encod-
ing in spikes exist in the brain (Izhikevich, 2003). For
this reason, it is important to study different types of
encoding that find a balance between trainability and
energy efficiency. In theory, there are an infinite num-
ber of ways to represent information in the form of
spikes, there is no necessity to limit oneself only to
temporal or rate encoding.
The most natural type of input for SNNs is event-
based data, since it already consists of binary events
and is further sparse and asynchronous. For exam-
ple, Dynamic Vision Sensor (DVS) cameras can be
used to detect intensity changes above a threshold in
an asynchronous manner (Gallego et al., 2022). For
traditional ANNs, processing this type of data is chal-
lenging because they perform synchronous computa-
tions. Thus pre-training an ANN directly with event
data for later conversion into a SNN becomes chal-
lenging, (Deng et al., 2019).
2.3 Training of SNNs
Despite all the successes of DL, the brain still remains
the reference point due to its comprehensive precision
and efficiency. For this reason, there is still a great re-
search effort to understand the exact processes in the
brain. Nevertheless, it is still not possible to find the
exact mechanism that allows the brain to learn com-
plex patterns and abstract thinking.
For traditional ANNs, the most successful train-
ing algorithm is backpropagation (Rumelhart et al.,
1986), which led to extraordinary successes for ANNs
in classification and recognition tasks (Krizhevsky
et al., 2012). However, this cannot be applied to SNNs
due to the non-differentiable nature of spike emer-
gence. Thus, the training of SNNs is still a challeng-
ing open research question. Currently, there are three
main types of training algorithms for SNN: Biologi-
cal, conversion based on a pre-trained ANN, and di-
rect training.
2.3.1 Biological Training
From a biological perspective, synaptic coupling in
the brain is strengthened when there is a positive cor-
relation between pre- and postsynaptic neuron activ-
ity (Morris, 1999). Similarly, synaptic depression
occurs when there is decorrelation of activity. This
phenomenon is described as Spike Timing Dependent
Plasticity (STDP) and is often used to train SNNs as
a more closely biological representation of the brain.
In this approach, synaptic weights are strengthened
when the presynaptic neuron fires just before the post-
synaptic neuron (Bi and Poo, 1998). This, however,
results in local updates during the training, making it
challenging to work with deep network architectures.
2.3.2 ANN to SNN Conversion
In order to transfer the progress in training and ar-
chitecture design of ANNs directly to SNNs, SNNs
can be constructed based on pre-trained ANNs
(Diehl et al., 2015). Thus, the obstacle of non-
differentiability is circumvented and state-of-the-art
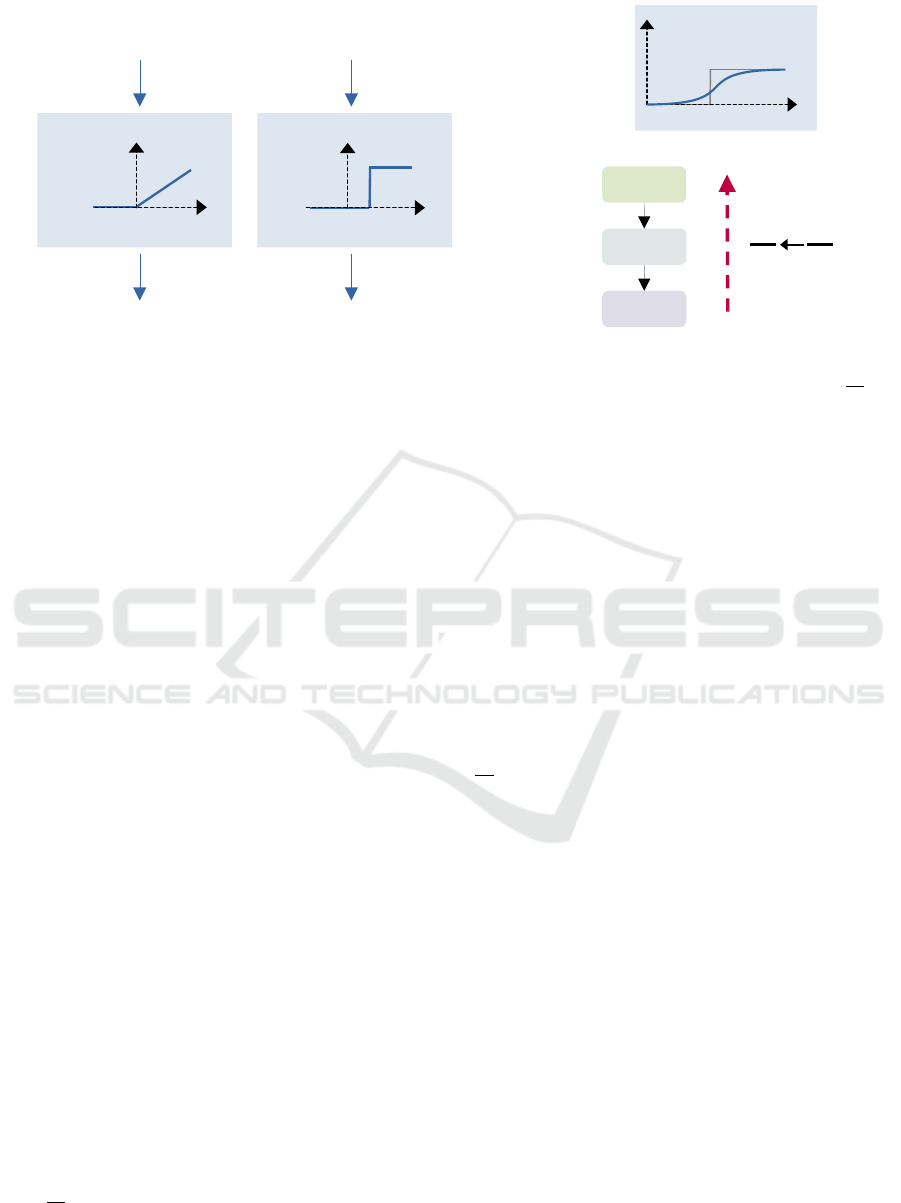
ANN approaches can be directly adopted. In theory,
the IF neuron can be seen as an unbiased estimator of
the ReLU activation, which is illustrated in Figure 1a.
Based on the definition of SNNs, the following re-
lationship at the input layer is obtained between the
firing rate r and the input z ∈ [0, 1] (Rueckauer et al.,
2017):
r =
z
θ
−
V
T
−V
0
T θ
. (4)
with V
T
and V
0
as the membrane potentials at t = T
and t = 0, respectively. Using z = a · θ with a as the
ReLU activation, θ = 1 and an infinite number of time
steps T , we get the following relationship between the
firing rate and the estimator for the ReLU activation
(Rueckauer et al., 2017):
r = a, (a > 0) (5)
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
468
𝑧 ∈ [0,1] = 0.8
𝑦 = 0.4
𝑤 = 0.5
𝔼[ (𝕐 𝑡)] = 0.4
𝑤/𝑎
𝑟 = [𝔼 ℤ(𝑡)] = 0.8
𝑎⋅θ
θ = 1
𝑧
𝔼[ℤ(𝑡)]
𝑦
θ = 1
𝔼[𝕐(𝑡)]
(a) Conversion of an ANN into a SNN.
θ = 1
U
S
Forward path Backward path
U
S
Loss
∂S
∂U
∂S
∂U
~
(b) Direct training.
Figure 1: Visual comparison of the conversion of a pre-trained ANN into a SNN (a) and the direct training (b) using
∂
˜
S
∂U
as a
surrogate gradient during the backward pass.
In a similar manner, these concepts can be extended
for higher layers. The basic idea of most conversion
approaches is then to approximate the inner floating
point values of the network using rate coding and
to adjust the ANN parameters so that the input val-
ues to each layer lie in the range of [0, 1]. There-
fore, the weights of the ANN have to be normalized,
using the maximum activation for each layer based
on the whole training dataset, with a threshold of 1
(weight-normalization) (Sengupta et al., 2019). An
equivalent approach is also to adjust the threshold by
a normalization factor while the weights are taken di-
rectly (threshold-balancing) (Sengupta et al., 2019).
The conversion approach by St
¨
ockl and Maass (2021)
is instead based on the temporal encoding of the input
data. However, their approach necessitates a modifi-
cation of the spiking neuron definition. This means,
the pre-trained ANN architecture as well as the input
encoding have to abide to a number of restrictions for
any of the currently available conversion methods to
work properly.
2.3.3 Direct Training
The advantage of using spikes directly is that a gradi-
ent can be calculated even if no spike occurred. For
this, the backpropagation is calculated over the dif-
ferent paths in the computational graph, which can
extend over several time steps, for example by us-
ing Back-Propagation Through Time (BPTT) (Wer-
bos, 1990). However, to calculate the gradient from
the loss to the network parameters, one must apply
the chain rule, which contains the non-differentiable
term
∂S
∂U
, as described in Section 2.1. The solution to
this is the use of a surrogate gradient function during
the backward pass, which is shown in Figure 1b. This
function approximates the gradient from the applica-
tion of the heaviside operator for U during the forward
pass.
Most often, variations of the following surro-
gate functions centered around the threshold are used
(Zenke and Vogels, 2021): Sigmoid, fast sigmoid, tri-
angular, or arctan function. However, the exact un-
derstanding of the influence of the biased gradient es-
timator is still missing. Nevertheless, the use of surro-
gate gradient is the current state-of-the-art for native
training of SNNs (Nunes et al., 2022). The great ad-
vantage of surrogate gradients is that they solve the
dead neuron problem. Conventionally, the gradient
∂S
∂U
= 0 when no spike is fired. Thus, the correspond-
ing neuron is not included in the loss and no learning
can take place on its weights. However, the applica-
tion of an approximation can overcome this obstacle
by a non-zero estimate, so that we can obtain a gradi-
ent over all layers.
2.4 Related Evaluation Studies
Previous comparisons between training methods for
SNNs focus on their application to very simple
datasets and architectures. For example, Deng et al.
(2019) compare directly trained as well as converted
SNNs and ANNs on MNIST (Lecun et al., 1998),
CIFAR10 (Krizhevsky, 2009) and their event driven
variant, N-MNIST (Orchard et al., 2015) and DVS-
CIFAR10 (Li et al., 2017). Their results suggest that
directly trained SNNs are best suited for frame-free
spike data. However, the datasets treated do not match
the complexity in real world applications, so we fo-
cus on the ImageNet (Deng et al., 2009) dataset and
On the Future of Training Spiking Neural Networks
469
ResNet (He et al., 2016) architecture in our work. The
papers by Rathi et al. (2020) and Rueckauer et al.
(2017) deal with more complex networks and data,
but they only compare the accuracy of the ANN train-
ing with the converted SNN, whereas our work in-
cludes the direct training of deep SNNs. Other papers
list the results of different training methods for SNNs
(Meng et al., 2022; Datta et al., 2021), but mainly fo-
cus on performance difference and not inherent re-
strictions by the training methods like we do in this
paper.
3 EXPERIMENTS AND RESULTS
3.1 Network Architecture
The focus of our work lies on the applicability of deep
SNNs for real-world scenarios. This is why, we use
the ResNet architecture (He et al., 2016) for our ex-
periments. It is based on building blocks which in-
clude a shortcut connection for identity mapping. Ac-
cordingly, it reduces the degradation problem for very
deep networks that are necessary for complex tasks.
In addition, the architecture for ImageNet includes a
maxpooling layer before the building blocks and fi-
nally an average pool and fully connected layer. We
use Resnet18 and ResNet34, which are the 18 and
34 layer version of the residual architecture. Fur-
thermore, the algorithm for conversion requires that
the ANN architecture does not contain maxpooling.
Therefore, we remove the maxpooling from the orig-
inal ResNet architecture (Resnet18* and ResNet34*)
and use these networks for the conversion into a SNN.
3.2 Training Details
Because of its challenging real world setting, we will
test the different SNN training methods for classifi-
cation on the ImageNet (Deng et al., 2009) dataset. It
contains about 1.3 million training images and 50,000
validation images with 1000 classes and is therefore
complex enough to represent a real-world scenario.
Moreover, we normalize the images and crop them to
a size of 224 × 224 pixels, randomly during training
and centered during inference. As optimizer we use
Stochastic Gradient Descent (SGD) and apply a batch
size of 32 with a starting learning rate of 0.00125. The
learning rate decays by γ = 0.1 after each 30 epochs.
We train for a maximum of 90 epochs. We further ap-
ply the cross-entropy loss for all algorithms and eval-
uate the top-1 accuracy for the classification on Ima-
geNet.
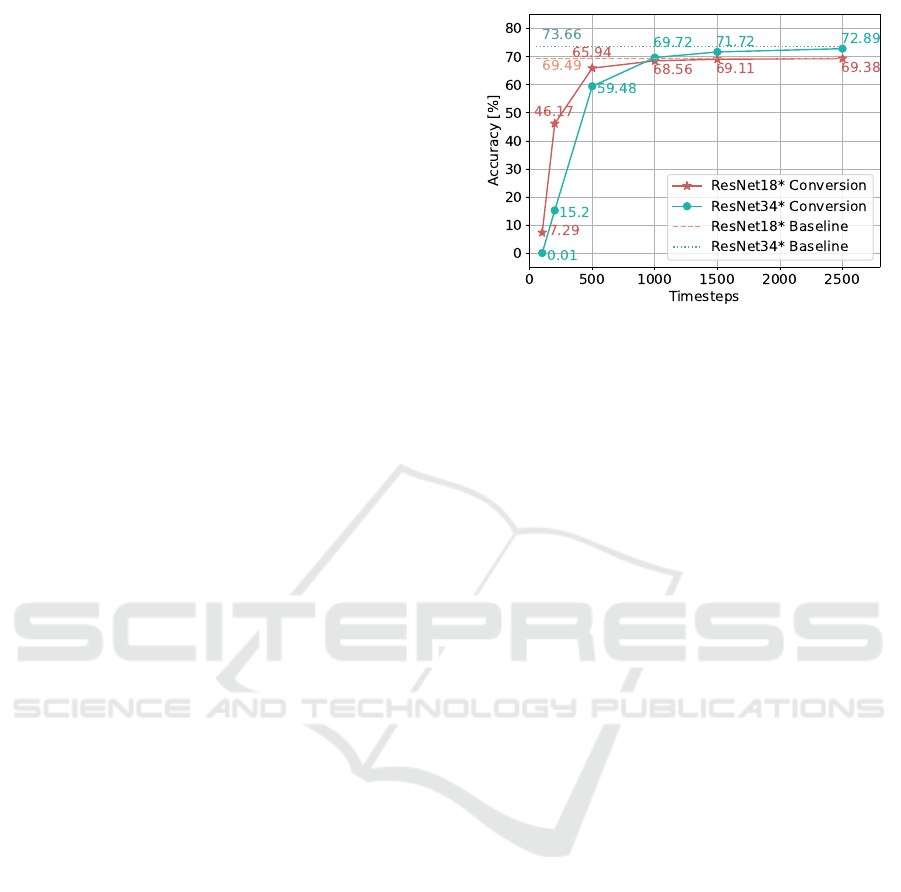
Figure 2: Results of the evaluation of the converted SNN for
the pre-trained networks ResNet18* and ResNet34* using
different numbers of time steps.
Our work puts its focus on the comparison of
the basic concepts and limitations behind different
training methods for SNNs and evaluates their po-
tential applicability in future real-world scenarios,
which does not only depend on the achieved accu-
racy. For this reason, we will use basic algorithms,
that showcase the general advantages and disadvan-
tages of the direct training of SNNs and the conver-
sion based on ANNs. For the direct training method,
we therefore use gradient descent and overcome the
non-differentiability of the spiking neuron formula-
tion by using the arctangent as a surrogate gradient
during the backward pass. To convert the trained
ANN into a SNN, we use the algorithm by Rueck-
auer et al. (2017). It addresses the handling of batch
normalization, whose parameters can be absorbed in
other parameter layers. In addition, the weights and
biases of the ANN are normalized by the maximum
output tensor of each layer.
3.3 ANN to SNN Conversion
In Figure 2 it can be seen that the accuracy after con-
version depends considerably on the number of time
steps t used for the simulation of the converted SNN.
After 100 time steps, the converted networks can only
achieve about 10 percent of the performance of the
original ANN for Resnet18*. For the deeper network
Resnet34*, the converted SNN is almost not able to
perform any classification after 100 steps. This shows
that the deeper the network architecture is, the more
accurate the approximations of the floating point val-
ues of the ANN must be. Accordingly, more time
steps for the rate coding are necessary to achieve a
certain performance. Only after 1000 time steps are
the converted SNNs able to reach a similar accuracy
compared to the baselines of the pre-trained ANNs.
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
470

Table 1: Top-1 classification accuracy on the ImageNet
evaluation dataset for the directly trained and converted
SNNs as well as for the pretrained ANNs.
Architecture NN type Training t acc1 [%]
ResNet18 ANN direct - 67.00
ResNet34 ANN direct - 70.70
ResNet18* ANN direct - 69.93
ResNet34* ANN direct - 73.66
ResNet18 SNN direct 5 47.99
ResNet18 SNN direct 10 53.51
ResNet34 SNN direct 5 44.73
ResNet34 SNN direct 10 52.71
ResNet18* SNN conversion 2500 69.38
ResNet34* SNN conversion 2500 72.89
However, the loss of performance compared to the
original network becomes negligible with 2500 time
steps. It can be seen that there is an exponential rela-
tionship between the number of time steps and the ac-
curacy. Nonetheless, the goal of the conversion meth-
ods is the approximation of the original ANN and will
thus most likely result in a reduced performance for
the SNN.
3.4 Direct Training vs Conversion
Table 1 shows the comparison of the results for the
original ANNs, the converted SNNs and the directly
trained SNNs. In this case, it can also be seen that re-
moving the maxpooling layer actually increases the
performance of the networks. Accordingly, the re-
sults from the conversion based on the Resnet18* and
ResNet34* architectures are not directly comparable
to the directly trained SNNs, which all contain the
maxpooling layer as in the original architecture.
The directly trained SNNs with t = 5 have about
20 percentage points lower accuracy than the original
networks, since the networks are very deep and the
error of the surrogate gradient adds up across the lay-
ers. However, for the directly trained ResNet18 and
ResNet34 with t = 10, the performance increases sig-
nificantly by about 6 and 8 percent, respectively, com-
pared to their training runs with 5 time steps, which
shows that a higher number of time steps leads to an
increased performance.This is due the higher number
of potential output spikes, which are produced for ev-
ery time step and help distinguishing similar classes.
Moreover, the resulting gradient becomes more mean-
ingful, since the behavior of all neurons is considered
over all time steps. Thus, there is further potential for
direct training if the number of time steps is increased
even further, especially for deeper architectures.
The results of the conversion with t = 2500 are
clearly superior compared to the directly trained
SNN. However, as evident from Figure 2, for the con-
versions of the ResNet18* and Resnet34* architec-
ture about 200 and 500 time steps, respectively, are
necessary to achieve similar results to the directly
trained SNNs. Therefore, the conversion methods re-
sult in a latency that is about two orders of magnitudes
higher compared to the direct training.
4 DISCUSSION
Training SNNs is still a challenging task, especially
for deep and complex network architectures. Biologi-
cal algorithms such as STDP currently handle only lo-
cal updates based on the correlation of the behaviors
of neighboring neurons. Since no end-to-end train-
ing of SNNs is possible in this way, the error is prop-
agated and accumulated through all network layers.
This makes it impossible to train deep state-of-the-
art network architectures. Nonetheless, there is great
potential in the biological approach, as it can lead to
more understanding of the brain’s processes.
However, until the global training processes in
the brain are discovered, direct training of SNNs is
the best option. Direct training takes into account
the temporal component of spikes and thus exploits
their true potential. This makes them particularly at-
tractive for applications with event-based data, since
they allow an asynchronous and sparse input with
which traditional ANNs have to struggle. The only
problem is the discontinuity in the spiking function,
which prevents gradient descent from being applied
directly. However, this can be solved by approximat-
ing the gradient by a surrogate function, especially
since it has been shown that even random feedback in
small networks leads to good results (Lillicrap et al.,
2016). Furthermore, the direct training of SNNs is the
only method, which has the future potential to fully
take advantage of neuromorphic chips for inference
as well as for training. This is relevant in terms of
energy efficiency in the whole process of creating ap-
plications of SNNs in real world scenarios. On syn-
chronous hardware such as GPUs, simulated training
of SNNs tends to have increased energy consumption
due to the multiple time steps over which spikes are
fed into the network.
The inherent temporal component of spiking data
cannot be exploited in a conversion from ANNs to
SNNs, since the ANN must be trained on synchronous
hardware and further struggles with very sparse in-
puts. Moreover, the converted SNN is necessarily
only an approximation of the original ANN with the
goal of increasing energy efficiency. However, the
temporal component is completely ignored, so that for
On the Future of Training Spiking Neural Networks
471

example event data cannot be entered directly. Fur-
thermore, other pruning methods are available in or-
der to reduce energy consumption of ANNs, which
means there is no necessity to enforce the constraints
of the SNN architecture in order to reach this goal.
In addition, the original floating point values must be
approximated by the firing rate during the conversion.
This means, that an enormous latency is required to
achieve a suitable accuracy, which in turn increases
the energy consumption and the inference time ex-
tremely. This makes converted SNNs almost unusable
for complex real world scenarios and direct training of
SNNs should be preferred.
ACKNOWLEDGEMENTS
This work was funded by the Carl Zeiss Stiftung,
Germany under the Sustainable Embedded AI project
(P2021-02-009).
REFERENCES
Adrian, E. D. and Zotterman, Y. (1926). The impulses pro-
duced by sensory nerve endings. The Journal of Phys-
iology.
Andrychowicz, O. M., Baker, B., Chociej, M., J
´
ozefowicz,
R., McGrew, B., Pachocki, J., Petron, A., Plappert,
M., Powell, G., Ray, A., Schneider, J., Sidor, S.,
Tobin, J., Welinder, P., Weng, L., and Zaremba, W.
(2019). Learning dexterous in-hand manipulation.
The International Journal of Robotics Research.
Arrow, C., Wu, H., Baek, S., Iu, H. H., Nazarpour, K.,
and Eshraghian, J. K. (2021). Prosthesis control us-
ing spike rate coding in the retina photoreceptor cells.
In International Symposium on Circuits and Systems
(ISCAS).
Balasubramanian, V. (2021). Brain power. Proceedings of
the National Academy of Sciences.
Bi, G. and Poo, M.-m. (1998). Synaptic modifications in
cultured hippocampal neurons: Dependence on spike
timing, synaptic strength, and postsynaptic cell type.
The Journal of Neuroscience.
Brunel, N. and van Rossum, M. C. W. (2007). Lapicque’s
1907 paper: from frogs to integrate-and-fire. Biologi-
cal Cybernetics.
Chen, X., Ma, H., Wan, J., Li, B., and Xia, T. (2017). Multi-
view 3d object detection network for autonomous
driving. In Conference on Computer Vision and Pat-
tern Recognition (CVPR).
Datta, G., Kundu, S., and Beerel, P. A. (2021). Train-
ing energy-efficient deep spiking neural networks with
single-spike hybrid input encoding. International
Joint Conference on Neural Networks (IJCNN).
Dehaene, S. (2003). The neural basis of the weber–fechner
law: a logarithmic mental number line. Trends in Cog-
nitive Sciences.
Deng, J., Dong, W., Socher, R., Li, L.-J., Li, K., and Fei-
Fei, L. (2009). Imagenet: A large-scale hierarchical
image database. In Conference on Computer Vision
and Pattern Recognition (CVPR).
Deng, L., Wu, Y., Hu, X., Liang, L., Ding, Y., Li, G., Zhao,
G., Li, P., and Xie, Y. (2019). Rethinking the per-
formance comparison between snns and anns. Neural
Networks.
Diehl, P. U., Neil, D., Binas, J., Cook, M., Liu, S.-C., and
Pfeiffer, M. (2015). Fast-classifying, high-accuracy
spiking deep networks through weight and threshold
balancing. In International Joint Conference on Neu-
ral Networks (IJCNN).
Gallego, G., Delbruck, T., Orchard, G., Bartolozzi, C.,
Taba, B., Censi, A., Leutenegger, S., Davison, A. J.,
Conradt, J., Daniilidis, K., and Scaramuzza, D.
(2022). Event-based vision: A survey. Transac-
tions on Pattern Analysis and Machine Intelligence
(TPAMI).
Gerstner, W. and Kistler, W. M. (2002). Spiking Neu-
ron Models: Single Neurons, Populations, Plasticity.
Cambridge University Press.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In Conference on
Computer Vision and Pattern Recognition (CVPR).
Izhikevich, E. (2003). Simple model of spiking neurons.
Transactions on Neural Networks.
Krizhevsky, A. (2009). Learning multiple layers of fea-
tures from tiny images. Technical report, University
of Toronto.
Krizhevsky, A., Sutskever, I., and Hinton, G. E. (2012). Im-
agenet classification with deep convolutional neural
networks (neurips). In Neural Information Process-
ing Systems.
Lecun, Y., Bottou, L., Bengio, Y., and Haffner, P. (1998).
Gradient-based learning applied to document recogni-
tion. Proceedings of the IEEE.
Li, H., Liu, H., Ji, X., Li, G., and Shi, L. (2017). Cifar10-
dvs: an event-stream dataset for object classification.
Frontiers in Neuroscience.
Lillicrap, T. P., Cownden, D., Tweed, D. B., and Akerman,
C. J. (2016). Random synaptic feedback weights sup-
port error backpropagation for deep learning. Nature
Communications.
Maass, W. and Markram, H. (2004). On the computational
power of circuits of spiking neurons. Journal of Com-
puter and System Sciences.
Meng, Q., Xiao, M., Yan, S., Wang, Y., Lin, Z., and Luo,
Z.-Q. (2022). Training high-performance low-latency
spiking neural networks by differentiation on spike
representation.
Morris, R. (1999). D.o. hebb: The organization of behavior,
wiley: New york; 1949. Brain Research Bulletin.
Nunes, J. D., Carvalho, M., Carneiro, D., and Cardoso, J. S.
(2022). Spiking neural networks: A survey. IEEE
Access.
Orchard, G., Jayawant, A., Cohen, G., and Thakor, N.
(2015). Converting static image datasets to spiking
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
472

neuromorphic datasets using saccades. Frontiers in
Neuroscience.
Rathi, N., Srinivasan, G., Panda, P., and Roy, K. (2020).
Enabling deep spiking neural networks with hybrid
conversion and spike timing dependent backpropaga-
tion. International Conference on Learning Represen-
tations (ICLR).
Rueckauer, B., Lungu, I.-A., Hu, Y., Pfeiffer, M., and Liu,
S.-C. (2017). Conversion of continuous-valued deep
networks to efficient event-driven networks for image
classification. Frontiers in Neuroscience.
Rumelhart, D. E., Hinton, G. E., and Williams, R. J. (1986).
Learning representations by back-propagating errors.
Nature.
Sengupta, A., Ye, Y., Wang, R., Liu, C., and Roy, K. (2019).
Going deeper in spiking neural networks: VGG and
residual architectures. Frontiers in Neuroscience.
St
¨
ockl, C. and Maass, W. (2021). Optimized spiking neu-
rons can classify images with high accuracy through
temporal coding with two spikes. Nature Machine In-
telligence.
Thompson, N. C., Greenewald, K., Lee, K., and Manso,
G. F. (2021). Deep learning’s diminishing returns:
The cost of improvement is becoming unsustainable.
IEEE Spectrum.
Vaswani, A., Shazeer, N., Parmar, N., Uszkoreit, J., Jones,
L., Gomez, A. N., Kaiser, L. u., and Polosukhin, I.
(2017). Attention is all you need. In Neural Informa-
tion Processing Systems (NeurIPS).
Werbos, P. (1990). Backpropagation through time: what it
does and how to do it. Proceedings of the IEEE.
Wu, Y., Deng, L., Li, G., Zhu, J., Xie, Y., and Shi, L. (2019).
Direct training for spiking neural networks: Faster,
larger, better. AAAI Conference on Artificial Intelli-
gence (AAAI).
Zenke, F. and Vogels, T. P. (2021). The remarkable ro-
bustness of surrogate gradient learning for instilling
complex function in spiking neural networks. Neural
Computation.
On the Future of Training Spiking Neural Networks
473
