
IACT: Intensive Attention in Convolution-Transformer Network for
Facial Landmark Localization
Zhanyu Gao
∗
, Kai Chen
∗
and Dahai Yu
TCL Corporate Research (HK) Co., Ltd, China
Keywords:
Transformer, Attention, Convolution.
Abstract:
Recently, the facial landmarks localization tasks based on deep learning methods have achieved promising
results, but they ignore the global context information and long-range relationship among the landmarks.
To address this issue, we propose a parallel multi-branch architecture combining convolutional blocks and
transformer layer for facial landmarks localization named Intensive Attention in the Convolutional Vision
Transformer Network (IACT), which has the advantages of capturing detailed features and gathering global
dynamic attention weights. To further improve the performance, the Intensive Attention mechanism is in-
corporated with the Convolution-Transformer Network, which includes Multi-head Spatial attention, Feature
attention, the Channel attention. In addition, we present a novel loss function named Smooth Wing Loss that
fills the gap in the gradient discontinuity of the Adaptive Wing loss, resulting in better convergence. Our IACT
can achieve state-of-the-art performance on WFLW, 300W, and COFW datasets with 4.04, 2.82 and 3.12 in
Normalized Mean Error.
1 INTRODUCTION
The facial landmarks localization task is to establish
coordinate information around the facial features and
the contour of faces, which mainly used for facial ex-
pression recognition (Savchenko, 2021), fatigue de-
tection (Parekh et al., 2020).
According to (Xia et al., 2022), the global contex-
tual information and the long-range dependencies be-
tween the landmarks are crucial to facial landmarks
localization tasks. Although Heatmap-based regres-
sion methods (Wan et al., 2020) provide an excellent
solution for facial images in extreme conditions, they
based on convolutional neural network (CNN) cannot
model the global contextual information and long dis-
tance relations due to local receptive fields. Heatmap-
based regression methods encode the coordinate in-
formation of the ground truth heatmap through Gaus-
sian distribution and decode the highest intensity in
the heatmaps of the coordinate information.
Facial landmarks localization tasks also have
other regression methods - the Coordinate direct re-
gression methods (Dong et al., 2020; Dong et al.,
2018; Guo et al., 2019; Feng et al., 2018) that map
feature maps to the landmarks via fully-connect lay-
ers (FC layers). However, directly projecting feature
maps into FC layers leads to losing local feature in-
*Authors contributed equally
formation and not robustness under challenging con-
ditions.
Transformer used to have achieved impressive
success in the natural language processing (NLP)
field. Recently, researchers are focusing on introduce
transformer to computer vision tasks since the pro-
posed of Vision in Transformer (ViT) [cite] first indi-
cate that transformer can perform comparable result
with those convolution-based network [cite]. How-
ever, directly apply the ViT architecture to different
tasks is not able to achieve considerable result and
need to make appropriate modifications.
As shown in Fig.1, we propose parallel multi-
branch architecture consisting of convolution blocks
and transformer blocks to overcome such barriers and
apply the transformer in the facial landmarks localiza-
tion. The convolution block is designed for extracting
pixel-level information and downsampling the feature
map size for computational efficiency and parameter-
friendly. The transformer block is design for global
information interaction through attention module.
To further improve the effectiveness and robust-
ness of the parallel architecture, the Intensive At-
tention mechanism is introduced into the structure,
which contains three parts: the multi-head Spatial
attention, the Feature attention, and the Channel at-
tention.The Intensive Attention mechanism improves
the detection accuracy of facial landmarks localiza-
Gao, Z., Chen, K. and Yu, D.
IACT: Intensive Attention in Convolution-Transformer Network for Facial Landmark Localization.
DOI: 10.5220/0011740900003417
In Proceedings of the 18th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2023) - Volume 4: VISAPP, pages
401-410
ISBN: 978-989-758-634-7; ISSN: 2184-4321
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
401

Figure 1: The whole structure of IACT. The parallel multi-branch structure could gain multi-model feature maps with various
resolutions. The Transformer stage(the white block) does not downsample the feature maps; it is only used for further
integrating multi-modal feature information.
tion and makes IACT comparable to other mainstream
methods.
The adaptive wing loss (Wang et al., 2019) per-
formed impressively in the heatmap-based regression
tasks. However, the Adaptive Wing loss has an un-
avoidable problem in that the gradient value of it dis-
continues around the zero point (y − ˆy = 0), which
will have an impact on training convergence. We pro-
posed a novel loss function called Smooth Wing Loss,
it can solve the problem by using a smoother curve.
We conduct a series of experiments on the heatmap
regression task to compare the training convergence
of Adaptive Wing Loss and Smooth Wing Loss and
thoroughly verify that Smooth Wing loss converges
faster than Adaptive Wing loss. Additionally, Smooth
wing loss could further converge at the later training
stage.
Our method can achieve state-of-the-art results on
three different facial landmarks datasets, 300W (Sag-
onas et al., 2013a), COFW (Burgos-Artizzu et al.,
2013) and WFLW (Wu et al., 2018), which is 2.82,
3.12 and 4.02 compare to the methods (Kumar et al.,
2020; Guo et al., 2019; Huang et al., 2021; Xia et al.,
2022).
The main contributionscan be summarized as fol-
lows:
• We introduce a parallel multi-branch framework,
IACT, which combines convolution stages and
transformer stages. The proposed IACT has the
advantages of capturing detailed features and spa-
tial subsampling from convolution and the abil-
ities of dynamic attention and global attention
weights fusion from transformer.
• To further improve the performance, we propose
the Intensive Attention mechanism, which can be
divided into Multi-head Spatial attention, Feature
attention, and Channel attention.
• We present a new loss function, Smooth Wing
Loss. Through the detailed experiments, we
demonstrate that Smooth Wing loss not only can
converge faster than Adaptive Wing loss but also
can further converge at the later training stage.
1.1 Related Work
With the development of CNN, face alignment meth-
ods have achieved exciting results. The mainstream
methods (Wang et al., 2020; Guo et al., 2019; Ku-
mar et al., 2020; Huang et al., 2021; Wang et al.,
2019; Huang et al., 2021) can be divided into the
Heatmap regression method and Coordinate regres-
sion method. Expecting the CNN-based method, the
regression method based on vision transformer (Xia
et al., 2022) recently also achieved impressive perfor-
mance.
1.2 Coordinate Regression Method
Coordinate Regression Method (Feng et al., 2018;
Zhang et al., 2016) utilize the fully connected layer
to project feature maps into the landmarks directly.
To acquire more accurate coordinate information, di-
verse cascaded networks (Trigeorgis et al., 2016)
and recurrent networks (Xiao et al., 2016) are uti-
lized to achieve face alignment with multi-stages. In
order to improve the robustness of the facial land-
marks tasks and solve the Intra-Dataset Variation and
Inter-Dataset Variation, Wu et al. (Wu and Yang,
2017) introduce Deep Variation Leveraging Networks
(DVLN) using two strong coupling sub-networks. In
addition, coordinate regression methods have trouble
detecting facial landmarks if they are in extreme con-
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
402

ditions. To address this problem, (Guo et al., 2019)
proposed a practical face detection network that uses
an auxiliary network jointly to predicate the land-
marks. (Feng et al., 2018) proposed the Wing loss
function that can surpass the performance of L2 loss
and demonstrated its effectiveness through experi-
ments.
1.3 Heatmap Regression Method
The Heatmap regression method (Dapogny et al.,
2019a; Deng et al., 2019; Kowalski et al., 2017;
Jin et al., 2021) maps the input image to probabil-
ity heatmaps through the network, and the maximum
point in each heatmap represents the probability of the
coordinate location. (Kowalski et al., 2017) combined
heatmap and landmarks for the first time, achieving
impressive results; (Kumar et al., 2020) firstly esti-
mates the uncertainty of the predicted locations, and
they proposed a novel framework for predicting land-
marks by associating uncertainties of these predicated
locations and landmark visibilities. Wu et al. (Wu
et al., 2018) used the boundary information of the face
to locate facial landmarks and proposed the WFLW
dataset, which includes facial images affected by dif-
ferent factors. Same as (Wu et al., 2018), (Wang et al.,
2019) also used boundary information to enhance the
fitting ability of the network and proposed a novel loss
function, named the Adaptive wing loss, for heatmap
regression tasks which can adapt its shape to different
types of ground truth heatmap pixels. But the Adap-
tive wing loss ignores the issue that the gradient can
not smooth and continue at every pixel, and we pro-
pose the Smooth Wing loss to fill this gap.
1.4 Vision Transformer
Transformers have achieved excellent results in the
NLP field. In the computer vision field dominated by
convolution networks, some researchers have noticed
that convolutional networks are problematic in mod-
eling the relationship between long-distance pixels,
motivating more and more researchers have invested
in the work of applying transformers to the CV field.
VIT (Dosovitskiy et al., 2020) divides the input im-
ages into patches, and maps them into a d-dimension
vector as the input of the self-attention layer to model
the long-distance relationship between patches and
patches, and successfully surpassed other state-of-
the-art methods based on CNN by pre-training on
large-scale datasets. Swin-Transformer (Liu et al.,
2021) uses shift windows to limit self-attention com-
putation to non-overlapping local windows, which
can reduce parameters and complexities meanwhile
improving performance. SLPT (Xia et al., 2022) pro-
posed a sparse local patch transformer, which can
generate the representations of the landmarks from
each local patch and learn the inherent relations be-
tween the landmarks.
Convolution and transformer have their own mer-
its, so we do not need to argue about which is better or
worse, what we need to do is that taking advantage of
them to achieve better performance. In this paper, we
propose the Intensive Attention in the Convolution-
Transformer Network, it has the strengths of both
convolution and transformer.
2 METHOD
As shown in Fig.1, IACT has a parallel multi-branch
structure containing two stages: Convolution and
Transformer stages. IACT can capture detailed fea-
tures and gather global dynamic attention weights
on account of the parallel multi-branch convolution-
transformer structure. The Intensive Attention im-
proves the performance of our parallel multi-branch
architecture, which includes the Multi-head Spatial
Attention, Feature Attention, Channel attention(Woo
et al., 2018). We propose the Multi-head Spatial at-
tention in the transformer stages, which uses the abil-
ity of sparse sampling to focus attention weights on
meaningful locations quickly. We insert the Feature
attention in the whole structure; as for it, we intro-
duce the exchanging feature information operation to
gain multi-model feature maps for better representa-
tions, and we add the Channel attention to model the
importance of these individual multi-model features.
2.1 The Multi-head Spatial Attention in
Transformer Stages
As shown in Fig.2, the Transformer stage contains
three parts: convolution embedding, Multi-head Spa-
tial attention, and Feed-forward Network(FFN).
2.1.1 Convolution Embedding
VIT (Dosovitskiy et al., 2020) divides the input image
or 2D feature map I ∈ R
H×W×C
into patches of size
P
h
×P
w
directly, P
h
and P
w
represents the weigh and
the height of each patch. For the same input, different
from VIT (Dosovitskiy et al., 2020), we want to take
full advantage of CNN to extract more low-level fea-
tures so that we use convolution to down-sample the
input image to gain the feature map, F ∈ R
H
2
×
W
2
×2C
,
then we flatten the feature map to get the 1D patches,
these patches are treated as tokens, whose length is
IACT: Intensive Attention in Convolution-Transformer Network for Facial Landmark Localization
403

Figure 2: The Multi-head Spatial Attention in the Transformer stage. The flatten operation means that the feature maps are
directly flattened into 1 ×1 patches, the reshape operation indicates that the 1-D vectors are reshaped back into 2-D feature
maps. The DeConv represents Deformable Convolution.
H
2
×
W
2
and dimension is 2C, then sending them into
the Multi-head Spatial attention layer.
We perform the downsample operation in the con-
volution embedding stages, generating multi-scale
feature maps while increasing feature dimension. The
convolution embedding process formula is as follows,
LN represents the Layer Normalization operation.
ConvEmbedding(I) = LN(Flatten(Conv(I))) (1)
2.1.2 Multi-Head Spatial Attention(MSA)
Different from the Multi-head self-attention structure
in the traditional transformer, when calculating the
value of Q(query), K(key), and V(value), we imple-
ment deformable convolution (Dai et al., 2017) pro-
jection instead of the linear projection. In the de-
formable convolution, it has an offset that can be
learned from input data, and then the offset is added
to each point of the receptive field, then the recep-
tive field is no longer a regular square shape. The
sparse sampling ability and the characteristic of data-
dependent from deformable convolution are vital for
MSA.
We reshape the 1D vectors gained from convolu-
tion embedding layers into 2D feature maps. Sup-
pose a reshaped 2D feature map I ∈ R
H×W ×C
is fed
into the Multi-head Spatial attention. The attention
layers have h heads, we get Q (query) feature maps,
K (key) feature maps, and V (value) feature maps
via deformable convolution projection, and we flatten
these 2D feature maps into the 1D vectors Q
v
,K
v
,V
v
∈
R
(H×W )×C
, the flatten operation is the same as the em-
bedding phase. C is the number of channels of the
feature map, H and W are the height and width of the
feature map, respectively, these vectors are equally
divided into h sequences Q
h
,K
h
,V
h
∈ R
h×(H×W )×
C
h
.
Then we perform matrix computation, soft-max func-
tion, and the linear projection on Q
h
,K
h
,V
h
, to obtain
vectors containing global attention weights informa-
tion, eventually giving them into the FFN.
Assuming I is the reshaped 2D feature map, the
following equation could summarize the process.
Q
h
,K
h
,V
h
= Flatten(I ×(W
q
h
,W
k
h
,W
v
h
)) (2)
Attention
h
(p) = So f tmax(
Q
h
×K
h
√
C
h
)(V
h
) (3)
MSA(p) = [Attention
1
(p); ... : Attention
h
(p)]W
p
(4)
Among them, C
h
=
C
h
and W
q
h
,W
k
h
,W
v
h
∈ R
C
h
×C
h
represents learnable matrices from deformable con-
volution, W
p
∈ R
C×C
is the learnable matrix from the
linear projection layer.
2.1.3 Feed-Forward Network
The Feed-forward Network(FFN) consists of two lin-
ear projection and a non-linear activation:
FFN(x) = σ(xW
1
+ b
1
)W
2
+ b
2
(5)
Where W
1
∈ R
C×K
is the weight of the first layer,
which projects tokens into a higher dimension K.
W
2
∈R
K×C
represents the weight for the second layer,
projecting tokens into an original dimension C, b
1
and
b
2
represents bias, and σ() is the activation of GELU.
At the end of FFN, we reshape the 1-D vectors into
2-D feature maps for exchanging information in the
following stages.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
404

2.2 The Feature Attention and the
Channel Attention in the Parallel
Multi-Branch Network Structure
The overall structure of IACT is shown in Fig.1. We
construct a parallel multi-branch network structure,
modeling the global attention weights information in
the Transformer stage, and extracting rich detailed
features in the Convolution stages. The Convolu-
tion stages contain four basic convolutional mod-
ules. Each module uses two stride-1 Conv-BN-Relu
blocks to extract C-channel features with more in-
formation maintained. We also add the Feature At-
tention mechanism and the Channel attention mech-
anism into the parallel structure, which can help our
IACT gain multi-model feature maps via exchanging
feature information and modeling the importance of
multi-model features.
Feature Attention: in the initial stage, we use CNN
Layer to extract low-level features from the input im-
age and then feed these feature maps into the parallel
structure. To distinguish the feature maps generated
by different stages, we name the feature map gener-
ated by the Convolution stage as the C-feature map
and the feature map generated by the Transformer
stage as the T-feature map. Due to the T-feature maps
being downsampled in the embedding layer, IACT
can gain various-resolution feature maps. The C-
feature map benefits from the convolutional network
and has rich detailed features, while the T-feature map
contains the global attention weights information.
Channel Attention: For better feature representa-
tions, we introduce the Feature attention and the
Channel attention that exists at the end of each
stage, we downsample the higher-resolution feature
maps to match the lowest-resolution feature maps,
then apply feature fusion operation on these various-
resolution feature maps via channel connection, gen-
erating multi-model feature maps. Subsequently, the
Channel attention is used to model the inherent rela-
tions between each multi-model feature. Finally, we
feed these multi-model feature maps into the Trans-
former stage to further strengthen the global contex-
tual information fusion.
Repeating Transformer stages and Convolution
stages three times, IACT can obtains four multi-
model feature maps with different resolutions, where
the C-feature maps are always the highest resolution
from the Convolution stage, which contains rich de-
tailed features information, and the other three feature
maps are obtained by exchanging feature information
between the Convolution stages and the Transformer
stages, which contains multi-model feature informa-
tion.
We interpolate these three feature maps with lower
resolutions to restore them to the exact resolution as
the C-feature map, performing channel connection
operations on them. We use convolution layers to
map these feature maps to heatmaps, the number of
channels is the same as the number of landmarks in
each facial image. We can get the predicted facial
landmarks by decoding these heatmaps, which con-
tain coordinate information. We refer to the method
(Yu and Tao, 2021), encoding the fractional part of
the numerical coordinates via the random rounding
method and decoding the maximum activation points
in the heatmaps of the numerical coordinates.
2.3 Smooth Wing Loss
(a) Gradient of losses (b) Loss functions
Figure 3: Adaptive Wing Loss and Smooth Wing loss.
When y=1, Fig.3(a) shows that the gradient of the Smooth
Wing loss is close to zero around the point (y− ˆy = 0), while
the Adaptive Wing loss tends to different values.
From Fig.3a, it can be known that when y = 1, the gra-
dient of the Adaptive Wing loss (Wang et al., 2019)
is not continuous at the y − ˆy = 0 (indicting the er-
ror), but with large gradient magnitude around this
point(y− ˆy = 0), there exits a negative impact on train-
ing convergence. It makes it difficult for the training
network to output zero or slight gradient at y − ˆy = 0
and could cause the training process to be unstable
and oscillating.
To solve this problem, we propose a novel loss
function for Heatmap regression tasks, Smooth Wing
Loss, defined as follows:
SW L(y, ˆy) =
K ln (1 + (y − ˆy)
2
)+
M(y − ˆy)
2
i f 0 < |y − ˆy| < θ
1
ω ln (1 + |
y−ˆy
ε
|
2
) i f θ
1
< |y − ˆy| < θ
2
A|y − ˆy|−C otherwise
(6)
Where y and ˆy are the pixel values on the ground
truth heatmap and the predicted heatmap respectively,
we set ω = 14, θ
1
= 0.05, θ
2
= 0.5, α = 2.1, ε = 1 .
Meanwhile, to make Smooth Wing loss function con-
tinuous and smooth at every pixels, we also set K =
(1 + θ
2
1
)(Bθ
1
−2ω ln1 + θ
1
)/(2θ
2
1
−2 ln1 + θ
2
1
)(1 +
θ
2
1
), B = ω(a − y)θ
a−y−1
1
/(ε + θ
a
1
− y), M = (A −
K ln 1 + θ
1
)/θ
2
1
. In order to prevent gradient explo-
sion and make Smooth Wing Loss be more robust to
IACT: Intensive Attention in Convolution-Transformer Network for Facial Landmark Localization
405

outliers, we set that A = ω(1/(1 + (θ
2
/ε)
a−y
))(a −
y)(1/ε)((θ
2
/ε)
a−y−1
), C = θ
2
−ω ln1 + (θ
2
/ε)
a−y
.
In addition, Smooth wing loss could also adap-
tively adjust the type of loss function according to
the value of the ground truth pixels. With significant
errors(y − ˆy), the derivative value of the loss function
on the predicted value reaches an upper limit, and the
upper limit is the value of C, which does not destroy
the network parameters. Smooth Wing loss perfectly
solves the defects of the Adaptive Wing loss and en-
sures that the network tends to be stable in the training
stage.
As shown in Fig.3a and 3b, our Smooth Wing loss
has a smoother curve, with its small gradient mag-
nitude around the zero-point, and it could decrease
rapidly to zero. In the training stage, it could converge
more quickly than the Adaptive Wing loss. Mean-
while, the smoother curve contributes to making the
training process more stable when the error is close
to zero, which means that Smooth wing loss could
converge further in the later training process. We
carry out a series of experiments on the Smooth Wing
loss function and the Adaptive Wing loss function, it
shows that our Smooth Wing loss not only converges
faster than the Adaptive Wing loss in the beginning
training stage, but also contributes to further conver-
gence.
3 EXPERIMENTS
3.1 Datasets
We carry out experiments on three popular bench-
marks, including WFLW (Wu et al., 2018), 300W
(Sagonas et al., 2013a), COFW (Burgos-Artizzu
et al., 2013)
WFLW: dataset contains 10000 face images, of
which 7500 face images are training images, and 2500
are test images. Each face image provides 98 manu-
ally annotated landmarks and attributed labels, such
as make-up and illumination.
300W: dataset has 3837 face images, each image is
annotated with 68 facial landmarks. The training and
test sets of 300W are composed of AFW (Zhu and Ra-
manan, 2012), Helen (Le et al., 2012), IBUG (Sago-
nas et al., 2013b), and LFPW (Belhumeur et al., 2013)
together.
COFW: dataset contains 1345 training images with
29 facial landmarks, and the test set provides 507 im-
ages. It mainly consists of face images with heavy
occlusion and profile faces.
3.2 Evaluation Metrics
Regarding related facial landmarks detection work
(Xia et al., 2022; Huang et al., 2021; Wang et al.,
2019; Kumar et al., 2020), we use the standard metric:
Normalized Mean Error (NME), Failure Rate (FR)
and Area Under Curve (AUC) to evaluate the pro-
posed method. The NME is defined as follows:
NME(S, S
gt
) =
1
N
N
∑
i=1
||p
i
−p
i
gt
||
2
d
×100% (7)
Where S and S
gt
represent the predicted and the
annotated facial landmarks respectively, p
i
and p
i
gt
represent i −th facial landmarks in S and S
gt
. N is
the total number of landmarks, d could be the dis-
tance between outer eye corners (inter-ocular) or the
distance between pupil centers (inter-pupils). FR in-
dicates the percentage of images in the test set whose
NME is higher than a certain threshold. AUC is cal-
culated based on the Cumulative Error Distribution
(CED) curve. AUC is the area under the CED curve,
from zero to the threshold for FR.
3.3 Implementation Details
We crop and resize each image to a resolution of
256 ×256, and they are downsampled to 64 ×64 to
generate heatmaps. We train the network mentioned
above framework using Adam optimizer (Kingma and
Ba, 2014), the initial learning rate is set to 0.0005,
train 120 epochs, the learning rate decays at the 40th
epoch and the 80th epoch, the decay rate is 0.2. We
set three parallel multi-branch stages with convolu-
tion and transformer, and finally we get four various-
resolution feature maps, we interpolate the other three
lower resolutions into the highest-resolution feature
maps. In addition, we randomly enhance the train-
ing data by random flipping (50%), mirroring (40%),
masking (30%), color gamut change (30%), rotation
(±30°), etc.
3.4 Comparison with State-of-the-Art
Method
3.4.1 WFLW
As tabulated in Table.1 and Table.2, our methods
demonstrate impressive performance on WFLW. With
the help of the Intensive Attention mechanism and the
proposed parallel multi-branch structure, the perfor-
mance of IACT outperforms the state-of-the-art meth-
ods (Huang et al., 2021; Xia et al., 2022; Kumar et al.,
2020). Specifically, IACT reaches 4.04 NME, 2.62
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
406

Table 1: Comparison with state-of-the-art methods on WFLW with inter-ocular NME(%)↓ , Params(M), Flops(G). Key:
[BEST,SECOND BEST].
Method Year Params Flops Full. Pose Exp. Ill. Mu. Occ. Blur
LAB CVPR 2018 12.26 18.96 5.27 10.24 5.51 5.23 5.15 6.79 6.32
Wing CVPR 2018 - 25 4.99 8.43 5.21 4.88 5.26 6.21 5.81
MHHN TIP 2020 - - 4.77 9.31 4.79 4.72 4.59 6.17 5.82
DeCaFA ICCV 2019 10 - 4.62 8.11 4.64 4.41 4.63 5.74 5.38
HRNet TPAMI 2020 9.66 4.75 4.65 7.94 4.85 4.55 5.29 5.44 4.86
LUVLI CVPR 2020 - - 4.37 7.56 4.77 4.30 4.33 5.29 4.94
AWing ICCV 2019 24.15 26.8 4.36 7.38 4.58 4.32 4.27 5.19 4.96
SDFL TIP 2019 - 5.17 4.35 7.42 4.63 4.29 4.22 5.19 5.08
ADNet ICCV 2021 13.37 17.04 4.14 6.96 4.38 4.09 4.05 5.06 4.79
SLPT CVPR 2022 19.45 8.14 4.12 6.99 4.37 4.02 4.03 5.01 4.79
Ours - 20.29 6.45 4.04 6.54 3.87 3.71 3.42 4.67 4.43
Table 2: Performance comparison of IACT and the state-of-the-art methods on WFLW. The normalization factor is inter-
ocular and the threshold for FR is set to 0.1. Key: [Best, Second Best].
Metric Method Full Pose Exp. Ill. Mu. Occ. Blur
LAB (Wu et al., 2018) 7.56 28.83 6.37 6.73 7.77 13.72 10.74
SAN (Dong et al., 2018) 6.32 27.91 7.01 4.87 6.31 11.28 6.60
HRNet (Wang et al., 2020) 4.64 23.01 3.50 4.72 2.43 8.29 6.34
LUVLi (Kumar et al., 2020) 3.12 15.95 3.18 2.15 3.40 6.39 3.23
FR
0.1
(%) AWing (Wang et al., 2019) 2.84 13.50 2.23 2.58 2.91 5.98 3.75
(↓) SDFL (Lin et al., 2021) 2.72 12.88 1.59 2.58 2.43 5.71 3.36
SDL (Li et al., 2020) 3.04 15.95 2.86 2.72 1.45 5.29 4.01
ADNet (Huang et al., 2021) 2.72 12.72 2.15 2.44 1.94 5.79 3.54
SLPT (Xia et al., 2022) 2.76 12.27 2.23 1.86 3.40 5.98 3.88
Ours 2.61 8.28 0.62 2.14 2.42 5.02 3.36
LAB (Wu et al., 2018) 0.532 0.235 0.495 0.543 0.539 0.449 0.463
SAN (Dong et al., 2018) 0.536 0.236 0.462 0.555 0.522 0.456 0.493
HRNet (Wang et al., 2020) 0.524 0.251 0.510 0.533 0.545 0.459 0.452
LUVLi (Kumar et al., 2020) 0.557 0.310 0.549 0.584 0.588 0.505 0.525
AUC
0.1
AWing (Wang et al., 2019) 0.572 0.312 0.515 0.578 0.572 0.502 0.512
(↑) SDFL (Lin et al., 2021) 0.576 0.315 0.550 0.585 0.583 0.504 0.515
SDL (Li et al., 2020) 0.589 0.315 0.566 0.595 0.604 0.524 0.533
ADNet (Huang et al., 2021) 0.602 0.344 0.523 0.580 0.601 0.530 0.548
SLPT (Xia et al., 2022) 0.595 0.348 0.574 0.601 0.605 0.515 0.535
Ours 0.615 0.409 0.625 0.636 0.619 0.575 0.587
FR
0.1
and 0.612 AUC
0.1
on WFLW, which demon-
strates that our method could localize the landmarks
accurately.
3.4.2 COFW
Following other works, we report results in terms of
NME and FR by inter-ocular normalization and inter-
pupil normalization. The compare result is shown
in Table.3. Compared to other excellent works, our
methods still maintain impressive performance and
surpass all state-of-the-art methods. Significantly,
IACT reaches 3.12 inter-ocular NME and 4.53 inter-
pupil NME.
3.4.3 300W
As shown in Table.4, we compared with previous
works in inter-ocular NME on the 300W benchmark
that contains full set, challenge set, and common set.
It is obvious that our methods also gain excellent re-
sults. Especially, IACT reaches 2.82 NME on the full
set, 2.51 NME on the common set and 4.09 NME on
the challenge set.
IACT: Intensive Attention in Convolution-Transformer Network for Facial Landmark Localization
407
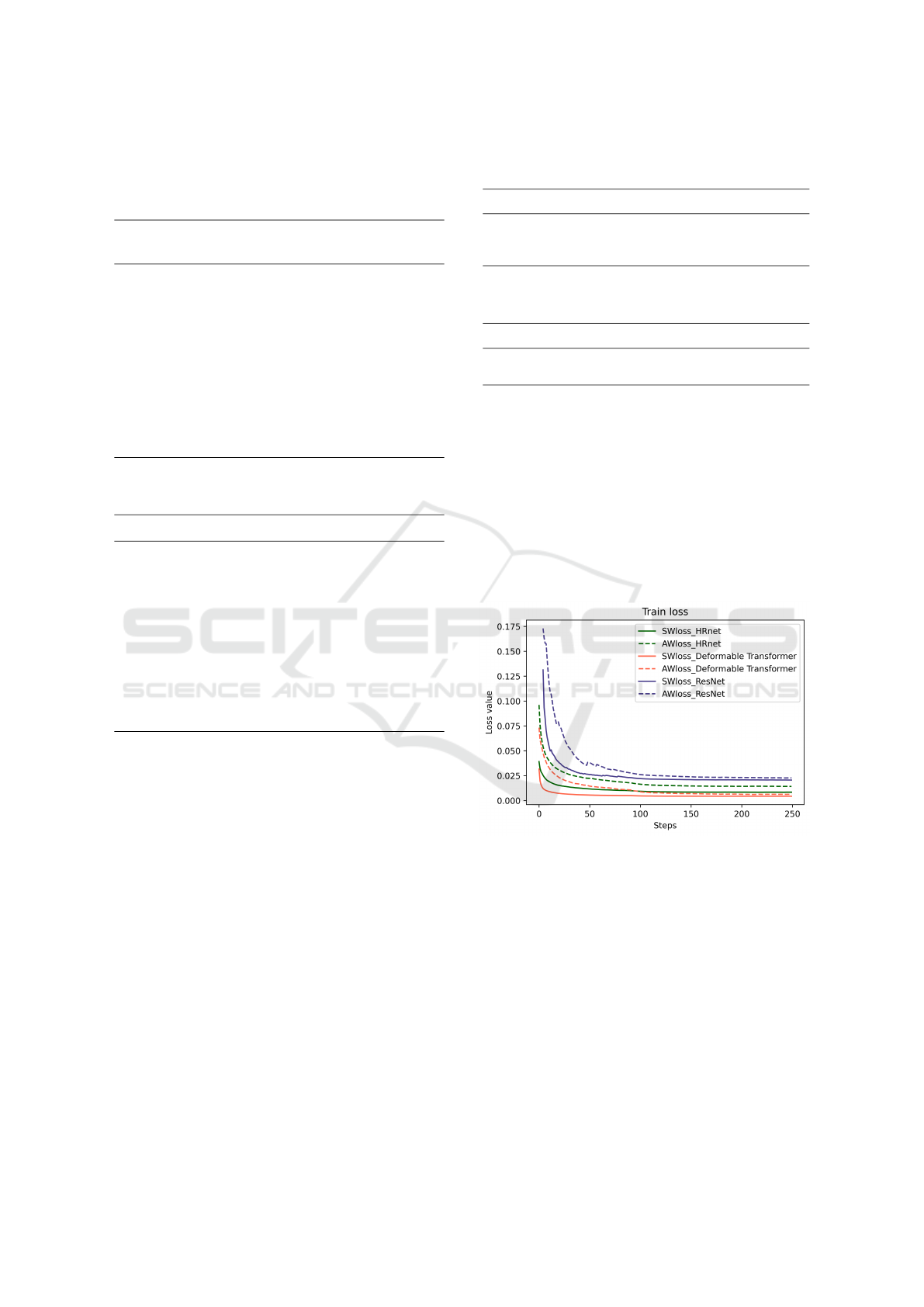
Table 3: NME and FR comparisons with State-of-the-art
methods under inter-ocular normalization and inter-pupil
normalization on COFW, the threshold for FR is set to 0.1.
Key: [Best, Second Best].
Method
Inter-Ocular Inter-pupil
NME(%)↓ FR(%)↓ NME(%)↓ FR(%)↓
LAB 3.92 0.39 5.58 2.76
SDFL 3.63 0.00 - -
HRNet 3.45 0.2 - -
DAC-CSR - - 6.03 4.73
Human - - 5.60 -
DCFE - - 5.27 7.29
MHHN - - 4.95 1.78
AWing - - 4.94 0.99
ADNet - - 4.68 0.59
SLPT 3.32 0.00 4.79 1.18
Ours 3.12 0.00 4.53 0.21
Table 4: Comparison with state-of-the-art methods under
inter-ocular NME(%)↓ on 300W. Key: [Best, Second Best].
Method Full Com. Chal.
LAB (Wu et al., 2018) 3.49 2.98 5.19
Wing (Feng et al., 2018) 3.60 3.01 6.01
DCFE (Valle et al., 2018) 3.24 2.76 5.22
DeCaFA (Dapogny et al., 2019b) 3.39 2.93 5.26
Awing (Wang et al., 2019) 3.07 2.72 4.52
HRNet (Wang et al., 2020) 3.32 2.87 5.15
LUVLI (Kumar et al., 2020) 3.23 2.76 5.16
SDFL (Lin et al., 2021) 3.28 2.88 4.93
ADNet (Huang et al., 2021) 2.93 2.53 4.58
SLPT (Xia et al., 2022) 3.17 2.75 4.90
Ours 2.82 2.51 4.09
3.5 Ablation Study
3.5.1 Evaluation on the Multi-Head Spatial
Attention
To explore the contribution of the Multi-head Spatial
attention module in the Transformer stages, we train
our Convolution-Transformer Network with different
transformer structures on the WFLW dataset. We in-
troduce Vit structure (Dosovitskiy et al., 2020) and
DETR structure (Carion et al., 2020). The results
are shown in Table.5. The Vit structure still outper-
forms other methods because of the parallel multi-
branch structure. With the DETR structure, the per-
formance on WFLW is boosted from 4.50% to 4.32%
in terms of NME. Our transformer structure with a
Spatial multi-head attention module has the best per-
formance, reaching 4.04% in NME.
Table 5: NME,FR,AUC with different transformer struc-
tures on WFLW. [Best].
Method Spa. VIT DETR NME(%)↓ FR(%)↓ AUC(%)↑
Model 1 - ✓ - 4.50 4.28 0.575
Model 2 - - ✓ 4.32 2.92 0.596
Model 3 ✓ - - 4.04 2.63 0.612
Table 6: NME,FR,AUC with/without Feature Attention
module on WFLW [Best].
Method NME(%)↓ FR(%)↓ AUC(%)↑
w/o Feature Attention 4.16 2.83 0.595
w Feature Attention 4.04 2.63 0.612
3.5.2 Evaluation on the Feature Attention
We implement two models with/without the Feature
Attention module to explore the influence of multi-
model feature information. With the Feature Atten-
tion module, the performance of IACT is improved,
as shown in Table.6.
3.5.3 Evaluation on Convergence Curves of
Smooth Wing Loss and Adaptive Wing
Loss
Figure 4: Convergence curves of different backbones using
Adaptive Wing Loss or Smooth Wing Loss.
We apply the Smooth Wing Loss and the Adaptive
Wing Loss on different backbones, such as HRNet
(Wang et al., 2020), ResNet (He et al., 2015), and
our IACT. The convergence curves of them are shown
in Fig.4. Experiments on different backbones show
that Smooth Wing Loss converges faster than Adap-
tive Wing Loss. Compared with it, Smooth Wing loss
converges further in the later training stages.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
408

4 CONCLUSION
In this paper, we propose a parallel multi-branch net-
work, combining the advantages of both the convo-
lution and transformer, which can capture rich de-
tailed features while modelling the long-range rela-
tions. Besides, the Intensive attention mechanism
is utilized in the network, which enables the net-
work to gain multi-model feature maps with differ-
ent resolutions for better representations and focus
global attention weight rapidly on sparse and mean-
ingful locations. Additionally, we propose a novel
and effective loss function, Smooth Wing Loss, which
steadily accelerates the convergence speed of the net-
work and can further converge at the later training
stage. Extensive experiments show that IACT outper-
forms the state-of-the-art methods, and the ablation
studies prove the effectiveness of the proposed meth-
ods.
REFERENCES
Belhumeur, P. N., Jacobs, D. W., Kriegman, D. J., and Ku-
mar, N. (2013). Localizing parts of faces using a
consensus of exemplars. IEEE transactions on pat-
tern analysis and machine intelligence, 35(12):2930–
2940.
Burgos-Artizzu, X. P., Perona, P., and Doll
´
ar, P. (2013).
Robust face landmark estimation under occlusion. In
Proceedings of the IEEE international conference on
computer vision, pages 1513–1520.
Carion, N., Massa, F., Synnaeve, G., Usunier, N., Kirillov,
A., and Zagoruyko, S. (2020). End-to-end object de-
tection with transformers. In European conference on
computer vision, pages 213–229. Springer.
Dai, J., Qi, H., Xiong, Y., Li, Y., Zhang, G., Hu, H., and
Wei, Y. (2017). Deformable convolutional networks.
In Proceedings of the IEEE international conference
on computer vision, pages 764–773.
Dapogny, A., Bailly, K., and Cord, M. (2019a). Decafa:
Deep convolutional cascade for face alignment in the
wild. In Proceedings of the IEEE/CVF International
Conference on Computer Vision, pages 6893–6901.
Dapogny, A., Bailly, K., and Cord, M. (2019b). Decafa:
Deep convolutional cascade for face alignment in the
wild. In Proceedings of the IEEE/CVF International
Conference on Computer Vision, pages 6893–6901.
Deng, J., Trigeorgis, G., Zhou, Y., and Zafeiriou, S. (2019).
Joint multi-view face alignment in the wild. IEEE
Transactions on Image Processing, 28(7):3636–3648.
Dong, X., Yan, Y., Ouyang, W., and Yang, Y. (2018). Style
aggregated network for facial landmark detection. In
Proceedings of the IEEE Conference on Computer Vi-
sion and Pattern Recognition, pages 379–388.
Dong, X., Yang, Y., Wei, S.-E., Weng, X., Sheikh, Y.,
and Yu, S.-I. (2020). Supervision by registration and
triangulation for landmark detection. IEEE transac-
tions on pattern analysis and machine intelligence,
43(10):3681–3694.
Dosovitskiy, A., Beyer, L., Kolesnikov, A., Weissenborn,
D., Zhai, X., Unterthiner, T., Dehghani, M., Minderer,
M., Heigold, G., Gelly, S., et al. (2020). An image is
worth 16x16 words: Transformers for image recogni-
tion at scale. arXiv preprint arXiv:2010.11929.
Feng, Z.-H., Kittler, J., Awais, M., Huber, P., and Wu, X.-J.
(2018). Wing loss for robust facial landmark localisa-
tion with convolutional neural networks. In Proceed-
ings of the IEEE conference on computer vision and
pattern recognition, pages 2235–2245.
Guo, X., Li, S., Yu, J., Zhang, J., Ma, J., Ma, L., Liu, W.,
and Ling, H. (2019). Pfld: A practical facial landmark
detector. arXiv preprint arXiv:1902.10859.
He, K., Zhang, X., Ren, S., and Sun, J. (2015).
Deep residual learning for image recognition. cite
arxiv:1512.03385Comment: Tech report.
Huang, Y., Yang, H., Li, C., Kim, J., and Wei, F. (2021). Ad-
net: Leveraging error-bias towards normal direction
in face alignment. In Proceedings of the IEEE/CVF
International Conference on Computer Vision, pages
3080–3090.
Jin, H., Liao, S., and Shao, L. (2021). Pixel-in-pixel
net: Towards efficient facial landmark detection in
the wild. International Journal of Computer Vision,
129(12):3174–3194.
Kingma, D. P. and Ba, J. (2014). Adam: A
method for stochastic optimization. arXiv preprint
arXiv:1412.6980.
Kowalski, M., Naruniec, J., and Trzcinski, T. (2017). Deep
alignment network: A convolutional neural network
for robust face alignment. In Proceedings of the IEEE
conference on computer vision and pattern recogni-
tion workshops, pages 88–97.
Kumar, A., Marks, T. K., Mou, W., Wang, Y., Jones, M.,
Cherian, A., Koike-Akino, T., Liu, X., and Feng, C.
(2020). Luvli face alignment: Estimating landmarks’
location, uncertainty, and visibility likelihood. In Pro-
ceedings of the IEEE/CVF Conference on Computer
Vision and Pattern Recognition, pages 8236–8246.
Le, V., Brandt, J., Lin, Z., Bourdev, L., and Huang, T. S.
(2012). Interactive facial feature localization. In Euro-
pean conference on computer vision, pages 679–692.
Springer.
Li, W., Lu, Y., Zheng, K., Liao, H., Lin, C., Luo, J., Cheng,
C.-T., Xiao, J., Lu, L., Kuo, C.-F., et al. (2020). Struc-
tured landmark detection via topology-adapting deep
graph learning. In European Conference on Computer
Vision, pages 266–283. Springer.
Lin, C., Zhu, B., Wang, Q., Liao, R., Qian, C., Lu, J.,
and Zhou, J. (2021). Structure-coherent deep feature
learning for robust face alignment. IEEE Transactions
on Image Processing, 30:5313–5326.
Liu, Z., Lin, Y., Cao, Y., Hu, H., Wei, Y., Zhang, Z., Lin,
S., and Guo, B. (2021). Swin transformer: Hierarchi-
cal vision transformer using shifted windows. In Pro-
ceedings of the IEEE/CVF International Conference
on Computer Vision, pages 10012–10022.
IACT: Intensive Attention in Convolution-Transformer Network for Facial Landmark Localization
409

Parekh, V., Shah, D., and Shah, M. (2020). Fatigue de-
tection using artificial intelligence framework. Aug-
mented Human Research, 5(1):1–17.
Sagonas, C., Tzimiropoulos, G., Zafeiriou, S., and Pantic,
M. (2013a). 300 faces in-the-wild challenge: The first
facial landmark localization challenge. In Proceed-
ings of the IEEE international conference on com-
puter vision workshops, pages 397–403.
Sagonas, C., Tzimiropoulos, G., Zafeiriou, S., and Pantic,
M. (2013b). 300 faces in-the-wild challenge: The first
facial landmark localization challenge. In Proceed-
ings of the IEEE international conference on com-
puter vision workshops, pages 397–403.
Savchenko, A. V. (2021). Facial expression and at-
tributes recognition based on multi-task learning of
lightweight neural networks. In 2021 IEEE 19th In-
ternational Symposium on Intelligent Systems and In-
formatics (SISY), pages 119–124. IEEE.
Trigeorgis, G., Snape, P., Nicolaou, M. A., Antonakos,
E., and Zafeiriou, S. (2016). Mnemonic descent
method: A recurrent process applied for end-to-end
face alignment. In Proceedings of the IEEE Con-
ference on Computer Vision and Pattern Recognition,
pages 4177–4187.
Valle, R., Buenaposada, J. M., Vald
´
es, A., and Baumela, L.
(2018). A deeply-initialized coarse-to-fine ensemble
of regression trees for face alignment. In Ferrari, V.,
Hebert, M., Sminchisescu, C., and Weiss, Y., editors,
ECCV (14), volume 11218 of Lecture Notes in Com-
puter Science, pages 609–624. Springer.
Wan, J., Lai, Z., Liu, J., Zhou, J., and Gao, C. (2020).
Robust face alignment by multi-order high-precision
hourglass network. IEEE Transactions on Image Pro-
cessing, 30:121–133.
Wang, J., Sun, K., Cheng, T., Jiang, B., Deng, C., Zhao,
Y., Liu, D., Mu, Y., Tan, M., Wang, X., et al. (2020).
Deep high-resolution representation learning for vi-
sual recognition. IEEE transactions on pattern analy-
sis and machine intelligence, 43(10):3349–3364.
Wang, X., Bo, L., and Fuxin, L. (2019). Adaptive wing
loss for robust face alignment via heatmap regression.
In Proceedings of the IEEE/CVF international confer-
ence on computer vision, pages 6971–6981.
Woo, S., Park, J., Lee, J.-Y., and Kweon, I. S. (2018). Cbam:
Convolutional block attention module. In Proceed-
ings of the European conference on computer vision
(ECCV), pages 3–19.
Wu, W., Qian, C., Yang, S., Wang, Q., Cai, Y., and Zhou,
Q. (2018). Look at boundary: A boundary-aware face
alignment algorithm. In Proceedings of the IEEE con-
ference on computer vision and pattern recognition,
pages 2129–2138.
Wu, W. and Yang, S. (2017). Leveraging intra and inter-
dataset variations for robust face alignment. In Pro-
ceedings of the IEEE conference on computer vision
and pattern recognition workshops, pages 150–159.
Xia, J., Huang, W., Zhang, J., Wang, X., Xu, M., et al.
(2022). Sparse local patch transformer for robust face
alignment and landmarks inherent relation learning.
arXiv preprint arXiv:2203.06541.
Xiao, S., Feng, J., Xing, J., Lai, H., Yan, S., and Kassim, A.
(2016). Robust facial landmark detection via recur-
rent attentive-refinement networks. In European con-
ference on computer vision, pages 57–72. Springer.
Yu, B. and Tao, D. (2021). Heatmap regression via random-
ized rounding. IEEE Transactions on Pattern Analysis
and Machine Intelligence.
Zhang, K., Zhang, Z., Li, Z., and Qiao, Y. (2016). Joint
face detection and alignment using multitask cascaded
convolutional networks. IEEE signal processing let-
ters, 23(10):1499–1503.
Zhu, X. and Ramanan, D. (2012). Face detection, pose es-
timation, and landmark localization in the wild. In
2012 IEEE conference on computer vision and pattern
recognition, pages 2879–2886. IEEE.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
410
