Data Streams: Investigating Data Structures for Multivariate
Asynchronous Time Series Prediction Problems
Christopher Vox
1
, David Broneske
2
, Istiaque Mannafee Shaikat
1
and Gunter Saake
3
1
Volkswagen AG, Wolfsburg, Germany
2
German Centre for Higher Education Research and Science Studies, Hannover, Germany
3
Otto-von-Guericke-Universit
¨
at Magdeburg, Magdeburg, Germany
Keywords:
Multivariate Asynchronous Time Series, Deep Learning, Convolutional Neural Network, Recurrent Neural
Network.
Abstract:
Time series data are used in many practical applications, such as in the area of weather forecasting or in the
automotive industry to predict the aging of a vehicle component. For these practical applications, multivariate
time series are present, which are synchronous or asynchronous. Asynchronicity can be caused by different
record frequencies of sensors and often causes challenges to the efficient processing of data in data analytics
tasks. In the area of deep learning, several methods are used to preprocess the data for the respective models
appropriately. Sometimes these data preprocessing methods result in a change of data distribution and thus, to
an introduction of data based bias.
Therefore, we review different data structures for deep learning with multivariate, asynchronous time series
and we introduce a lightweight data structure which utilizes the idea of stacking asynchronous data for deep
learning problems. As data structure we create the Triplet-Stream with decreased memory footprint, which
we evaluate for one classification problem and one regression problem. The Triplet-Stream enables excellent
performance on all datasets compared to current approaches.
1 INTRODUCTION
Time series data are generated, gathered and pro-
cessed all over the world. Thereby, these data are
of diverse nature, as there are, among others, peri-
odically sent short text messages, employees avail-
ability recordings, measurements of patient data for
clinical purposes, but also manifold sensor measure-
ments, which enable digitalized and autonomous ser-
vices. If we consider one recording at a specific time
point, then this measurement can have different di-
mensionality, such as images or text messages result
in value matrices and value vectors, whereas temper-
ature sensors generate one value per time point. The
time series evaluated within this work can be repre-
sented by the measurement information I : {(x,t) ⊆
I| x
(n,m)
∈ R
z
, t ∈ R
+
}. The measurement x is defined
by the three-dimensional space spanned over n,m, z.
In the following, we limit ourselves to measurements
of one dimensional nature (n = m = z = 1) at a certain
time point t.
A specific challenge is that the introduced infor-
mation I can have different properties such as missing
or incorrect measurements (Sun et al., 2020; Weer-
39.8
40
40.1
40.2
40.1
𝑡
1
𝑡
3
𝑡
4
𝑡
7
𝑡
8
100
101.5
104
105 106
𝑡
1
𝑡
2
𝑡
3
𝑡
4
𝑡
5
1 0
𝑡
1
𝑡
6
Vehicle Temperature Sensor (𝑆
1
)
Vehicle Speed Sensor (𝑆
2
)
Vehicle Light Sensor (𝑆
3
)
°C
time
km/h
time
On/Off
time
Figure 1: Characteristic of vehicle sensor data.
akody et al., 2021). Furthermore, measurements
from different sources can have different record fre-
quencies, which causes an asynchronous multivariate
space (Vox et al., 2022). According to (Wu et al.,
2018), multivariate time series data can be character-
ized as synchronous or asynchronous, as regular or
irregular and as co-cardinal or multi-cardinal. Asyn-
chronicity can be defined as multivariate time series
state, where the measurements of the univariate time
series are not synchronized to a uniform time pat-
tern and thus not aligned on the time domain. More-
over, when the amount of measurements of univariate
time series within a multivariate time series space are
different, the time series space can be described as
686
Vox, C., Broneske, D., Shaikat, I. and Saake, G.
Data Streams: Investigating Data Structures for Multivariate Asynchronous Time Series Prediction Problems.
DOI: 10.5220/0011737300003411
In Proceedings of the 12th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2023), pages 686-696
ISBN: 978-989-758-626-2; ISSN: 2184-4313
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

multi-cardinal. In addition, when all univariate time
series have the same amount of measurement points,
the multivariate time series space is co-cardinal.
The data source we investigate is shown in Fig-
ure 1. Three different sensors (one temperature sensor
(S
1
), one speed sensor (S
2
) and one light control sen-
sor (S
3
)) are presented, which have unevenly spaced
measurements due to an event-based recording. Thus,
the multivariate sensor space is asynchronous, multi-
cardinal and irregular but is referred to in simplified
terms as asynchronous time series in the following.
As already introduced, different variations of time
series exist whereby the investigation of this work is
based on time series of one-dimensional characteris-
tic. The investigation covers two prediction problems
in the context of Multivariate asynchronous Time Se-
ries (MaTS). The first prediction problem is based
on a clinical dataset, which describes the in-hospital
mortality of patients. The second problem under in-
vestigation is based on a vehicle component aging
dataset.
Within literature, different models have been in-
troduced, which solve the prediction problems with
complex model architectures or with the help of syn-
chronizing aggregations (Che et al., 2018; Sass et al.,
2019; Horn et al., 2020; Shukla and Marlin, 2021).
Particularly, over the last years the depth of Deep
Neural Networks (DNNs) grew significantly to opti-
mize the reliability and the goodness of estimation. In
contrast, (Schwartz et al., 2020) elaborated the impor-
tance of the consideration of the efficiency of machine
learning to minimize the required computational ef-
fort. They identified that only a small percentage of
publications evaluated by them focused on the effi-
ciency of deep Artificial Neural Networks (ANNs)
also called DNNs. Especially, with respect to sustain-
ability and with regard to the rebound effects of dig-
italization, machine learning models should process
time series data efficiently. Hence, the focus of the
development of DNNs should be on small and opti-
mized models with reduced data preprocessing effort.
One benefit of this optimization can be an efficient
and highly optimized continuous operation of DNNs.
For this purpose, we investigate present data struc-
tures for DNNs which are used to solve prediction
problems based on MaTS. Likewise, we evaluate the
models that utilize the data structures, based on their
performance and capacity. On the basis of the estab-
lished solutions, we develop a lightweight but highly
efficient data structure to solve asynchronous time se-
ries prediction problems. The main contributions of
this paper are as follows:
• Investigating data structures and models for pre-
diction problems based on MaTS. Focusing on
introduced bias by manipulating the data distribu-
tion and on the main memory footprint of the data
structures.
• Developing a lightweight but highly efficient data
structure to enable Convolutional Neural Net-
works (CNNs) and Recurrent Neural Networks
(RNNs) to solve two asynchronous time series
prediction problems which are one binary classi-
fication problem and one regression problem.
The remainder of this paper is structured as follows.
We describe the related work in Section 2. In Sec-
tion 3 we describe preliminaries and the methodol-
ogy. According to the introduced method, we present
in Section 4 the experimental setup, the data source
and the evaluations. Finally, Section 5 summarizes
our findings of this research.
2 RELATED WORK
The datasets which are considered within this work
correspond to those of MaTS. Based on the find-
ings, which have been gathered through the exten-
sive evaluation and processing of synchronous time
series, in recent years, different approaches and meth-
ods have been developed to process and represent the
rather complex time series asynchronicity with the
help of statistical models and DNNs. For problems
based on asynchronous time series, discretization can
be seen as a basic procedure to use statistical mod-
els and kernel-based methods which require a fixed-
length input.
Besides discretization methods, asynchronous
time series can be processed in two ways (Sun et al.,
2020; Weerakody et al., 2021). Firstly, by interpreting
missing and irregular measurements as informative,
through which different imputation strategies have
been developed (Little and Rubin, 2019). Secondly,
by processing the measurements as close as possible
in their original measuring state.
2.1 Synchronous Time Series Modeling
Discretization of time series generates a synchronized
time pattern and a uniform distance between con-
secutive measurements. Hence, Support Vector Ma-
chines (SVMs), Gaussian Process Regression (GPR),
Random Forest Regression, Hidden Markov Models,
Bayesian Networks and Kalman Filters can be applied
to solve multivariate time series related problems (Ra-
biner, 1989; Ramati and Shahar, 2010; Shih et al.,
2019).
Data Streams: Investigating Data Structures for Multivariate Asynchronous Time Series Prediction Problems
687

Besides the introduced statistical models, DNNs
have been utilized to solve time series related prob-
lems. (Fawaz et al., 2020) evaluated CNNs for their
capability to solve multivariate time series classifi-
cation problems. They identified, that Fully Con-
volutional Networks (FCNs) and residual networks
are well suited for their problem under investiga-
tion. Based on these findings and also continuing
the work of (Szegedy et al., 2016), who developed
the Inception-Network for computer vision tasks, they
developed the InceptionTime network for multivariate
time series.
Thirdly, DNNs designed as RNNs, such as the
Long Short-Term Memory (LSTM)(Hochreiter and
Schmidhuber, 1997) and the Gated Recurrent Unit
(GRU)(Cho et al., 2014) have been applied to time se-
ries related prediction and forecasting problems and
have shown impressive results (Shih et al., 2019;
Yang et al., 2019; Hewamalage et al., 2021).
Fourthly, attention mechanisms are used in DNNs
for positional and time encoding. While utilizing
self-attention for positional encoding, Transformers
by (Vaswani et al., 2017) have been a break-through
in terms of splitting the input into learnable repre-
sentations. Subsequent work applied positional or
time-based attention layers to the time series do-
main. Different combinations of those attention lay-
ers with Multi-Layer Perceptrons (MLPs) and RNNs
have shown impressive results for prediction tasks
(Song et al., 2018; Ma et al., 2019; Horn et al., 2020;
Shukla and Marlin, 2021).
2.2 Missingness as Information
Discretization or a join between different modalities
can generate a global time axis with aligned mea-
surements. This allows to consider the problem as
missing value problem and not as an irregular value
problem (Lipton et al., 2016). In this regard, (Lipton
et al., 2016) investigated whether missing indicators
support LSTM networks for classification problems.
They evaluated different combinations of imputation
strategies (zero imputation and forward interpolation)
with and without missing indicators. The investiga-
tion showed, that the combination of zero value im-
putation and missing indicators result in the best clas-
sification performance.
Besides the work of (Lipton et al., 2016), (Neil
et al., 2016) improved the LSTM architecture to be
capable to process event based unevenly spaced time
series. Therefore, they used the time information
within a time gate, which they incorporated into the
LSTM cell. The time gate is controlled by an oscil-
lation, which is parameterized by three learnable pa-
rameters. Only when the time gate is open, the LSTM
states are updated. When the time gate is closed, the
last cell state maintains although a defined leak of im-
portant gradients is allowed. Due to the sparse up-
dates, the memory capability of the LSTM could be
improved.
Subsequently, (Che et al., 2018) investigated GRU
networks with different imputation strategies, such as
mean value and zero value imputation as well as for-
ward interpolation, to evaluate the impact to the clas-
sification performance. Therefore, the zero imputa-
tion strategy was enriched by missing indicators and
delta time information. Moreover, they modified the
GRU network and introduced trainable exponential
decays which they applied to the input and the hid-
den state between observations. The so called GRU-
D was able to outperform the different baseline GRU
imputation strategies at two benchmark classification
datasets.
(Lipton et al., 2016) as well as (Che et al., 2018)
were able to empirically support the hypothesis of
(Ramati and Shahar, 2010) who formulated inefficient
training based on artificial generated samples. Also,
they were able to indicate inefficient modeling due to
data bias based on artificially imputed information,
when we consider zero imputation as negligible bias.
2.3 Raw Processing & End-to-End
Learning
Based on the work of (Rasmussen and Williams,
2006; Li and Marlin, 2016; Futoma et al., 2017), who
utilized Gaussian Process (GP) and Multitask Gaus-
sian Process (MGP) to approximate and process irreg-
ular time series, (Shukla and Marlin, 2019) developed
an end-to-end algorithm without calculation intensive
Gaussian Processes (GPs). They used Radial Basis
Functions (RBFs) as semi-parametric, feed-forward
interpolation layer. With the help of reference time
points, each series of the multivariate space is ag-
gregated to a fixed representation. Followed by a
concatenation, the multiple fixed-length representa-
tions are processed by a cross-dimensional interpola-
tion layer to obtain learnable correlations. In their ex-
periment they combined the interpolation stage with a
GRU network. The resulting Interpolation Prediction
Network (IPNet) was able to outperform the GP-GRU
as well as the GRU-D architecture within a classifica-
tion benchmark.
(Rubanova et al., 2019) developed a generaliza-
tion of the continuous state transition for recurrent
networks. The basic idea is to understand the hid-
den state of RNNs as solution of an Ordinary Dif-
ferential Equation (ODE), which ensures a continu-
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
688

ous dynamic representation. As a consequence of the
continuous state transition, the modeling of unequally
space time series could be optimized. The Latent-
ODE (L-ODE-ODE) was able to outperform existing
Recurrent Neural Network (RNN) based approaches
on a classification benchmark dataset.
Parallel to the continuous development of RNN
architectures for MaTS, (Horn et al., 2020) devel-
oped an architecture, called Set Functions for Time
Series (SeFT), based on Set-Functions (Zaheer et al.,
2017), which directly process the unequally spaced
measurements. The SeFT model does not need a prior
ordering of sequential measurements. The measure-
ments are converted to sets (time, value, modality in-
dicator) and are processed disordered. The informa-
tion of events and the respective occurrence in time is
preserved and learned by the model with the help of a
time encoding layer and a Transformer like aggrega-
tion network. A weighted mean aggregation approach
is utilized to separate important and unimportant time
encoded sets. The many weights approach results in
a multi-head attention layer. The output of the multi-
head attention is subsequently processed by an aggre-
gation network.
(Shukla and Marlin, 2021) have utilized atten-
tion to create a deep learning interpolation network,
which they called Multi Time Attention Networks
(mTANs). The authors combined a time encoding
layer (generated via a learnable embedding) with a
multi-time attention layer. The multi-time attention
layer processes the multiple generated time embed-
dings to create a fixed representation based on refer-
ence time points. The fixed output of the discretized
mTANs (mTAND) architecture can then be processed
by a black-box classifier. Thus, the mTAND can
be interpreted as interpolation module which is not
build upon GPs and Radial Basis Function (RBF) ker-
nels, as they have been introduced by (Li and Marlin,
2016; Shukla and Marlin, 2019). In their experiments
they combined mTAND with a GRU and trained the
combined mTAND model in an end-to-end fashion.
They achieved impressive results on two classifica-
tion benchmark datasets where they were able to out-
perform the most other recently published models.
3 PRELIMINARIES AND
METHODOLOGY
This section begins with the depiction of the related
work problem. Connected to the related work prob-
lem, different data structures are visualized, which are
used in relevant model implementations. Based on the
present data structures a new data structure is intro-
duced. Lastly, models are described, which are used
to process the variable feature space we have devised.
3.1 Related Work Problem
According to Section 1, and in particular with regard
to sustainable application of AI, the development of
efficient DNNs is important. In recent years, differ-
ent methods have been developed, which can pro-
cess MaTS (cf. Section 2). The models have been
continuously improved to achieve even higher predic-
tion accuracy based on benchmark datasets. The most
common quality characteristics were training time per
epoch and prediction accuracy estimated with the use
of a test dataset. The evaluation of model size (also
known as model capacity) has received little to no at-
tention.
Moreover, the research of the last seven years stated,
that normal RNNs are insufficient to solve missing
value problems. Thus, advanced and modified RNNs
have been developed. Also, attention mechanisms
were introduced into end-to-end learning concepts
which enabled even higher performance on bench-
mark datasets. However, can we utilize existing gen-
eral purpose DNNs, such as the RNN, to reach equal
performance compared to recently published models?
3.2 Data Structures of MaTS
When we are considering vehicle sensor networks,
different sensors and also different network protocols
interact. Hence, if we gather diverse sensor informa-
tion in a central node, then this multivariate measure-
ment space is asynchronous, as Figure 1 depicts. Be-
sides the vehicle specific sensor measurements, dif-
ferent DNNs have been introduced, which tried to
reach optimal prediction accuracy applied to irregu-
lar sampled time series benchmark datasets, such as
the PhysioNet dataset (Goldberger et al., 2000; Silva
et al., 2012). However, as complex as the models have
become, the models consume and process the asyn-
chronous data in similar ways. Generally, the mod-
els can be ordered to one of the three data structures
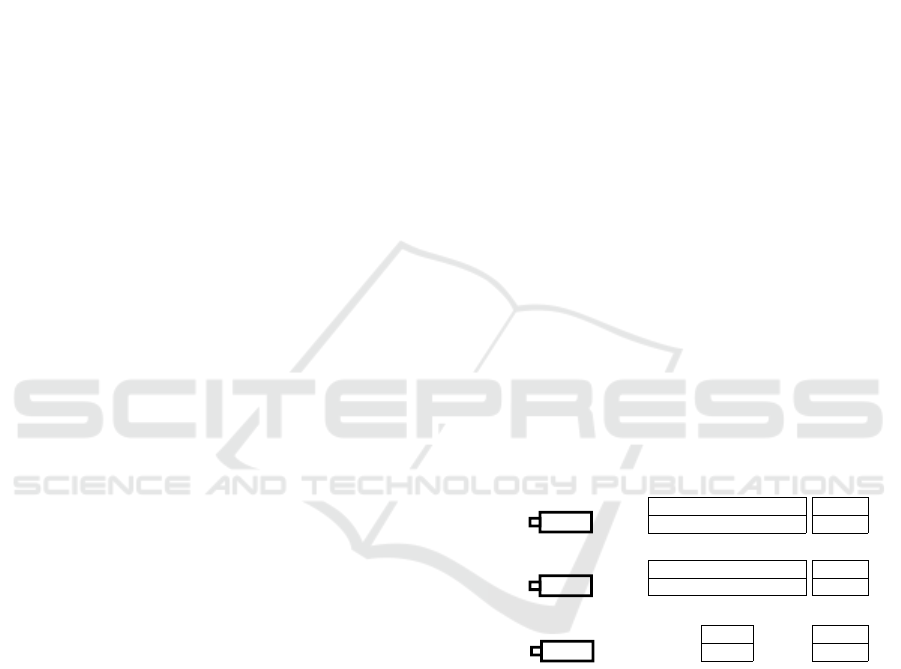
shown in Figure 2. The parameter T represents the
time information and S
i
represents the time series of
the measurement interval t
[1,8]
.
The data structure shown in a) indicates the con-
cept of interpolation and imputation of missing val-
ues indicated by σ. Strategies such as forward inter-
polation or mean value imputation have been used to
generate a synchronized multivariate time series of a
defined dimensionality (Che et al., 2018). The data
structure of b) shows a mask matrix (also known as
missing indicator), which indicates whether the val-
Data Streams: Investigating Data Structures for Multivariate Asynchronous Time Series Prediction Problems
689
39.8
100
101.5
40 104
40.1 105
106
0
40.2
40.1
39.8
100
101.5
40 104
40.1 105
106
0
40.2
40.1
1 1 1
0 1 0
1 1 0
1 1 0
0 1 0
0 0 1
1 0 0
1 0 0
39.8
40
40.1
40.2
40.1
100
101.5
104
105
106
1 0
a) b)
c)
T
T
Figure 2: General MaTS data structures for Deep Neural Networks. Structure a) depicts the interpolation and imputation
strategy, structure b) shows missing information as valuable information with the use of a masking layer and structure c)
depicts the rather non-preprocessed processing of multivariate sensor data.
ues of the NaN-matrix (note that the NaNs can be im-
puted diversely) are real measurements or negligible
values for the deep neural network. (Che et al., 2018)
used the mask as missing indicator to enrich the in-
formation, which is given to the DNN. In contrast,
(Shukla and Marlin, 2021) used the mask to extract
valid measurements. The data structure of c) repre-
sents an array for each time series. To process the data
structure of c), methods can be applied, which process
each time series individually. Afterwards, the outputs
are aggregated to a latent space of length dependent
on the amount of time series. The latent space is then
used within a final fixed-input size predictor. As we
identified, the data structure of c) minimizes the data
preprocessing effort.
3.3 Data Streams
The main optimization aspects for processing MaTS
are the model as well as the data structure which rep-
resents the given information. Hence, we fully utilize
the property that RNNs and CNNs can process vari-
able feature spaces. Therefore, the feature space is
created with the fundamental idea to change the raw
measurements and the existing array, which holds the
measurements in the main memory, as less as possi-
ble, to reduce the data preprocessing effort. As further
requirements we define:
• The data distribution of the raw measurements
should not be changed, compared to when no im-
putation strategy is applied.
• When considering hardware constraints on em-
bedded devices, the input data structure should be
as small as possible. Thus, missing value indica-
tors are rather inappropriate.
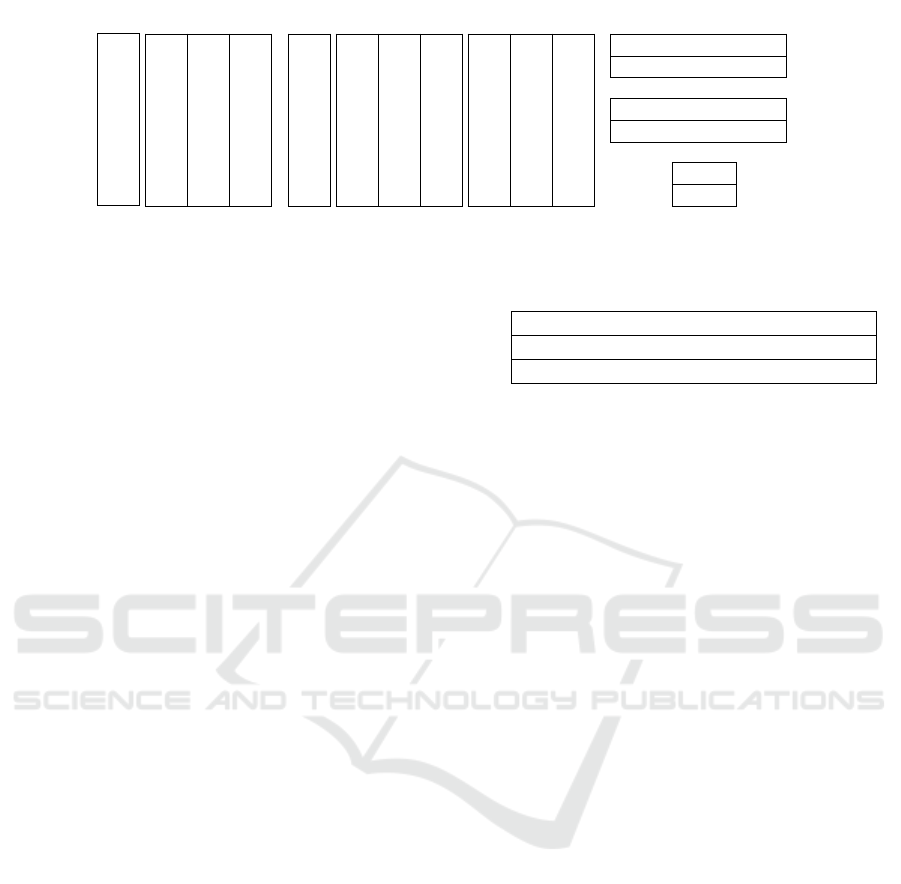
Thus, we developed a vertically stacked data struc-
ture named as Triplet-Stream, which is shown in Fig-
ure 3. We assume that CNNs as well as RNNs should
be capable to generalize over a multivariate feature
space, when the features are arranged vertically. The
T
𝑡
1
𝑡
3
𝑡
4
𝑡
7
𝑡
8
𝑡
1
𝑡
2
𝑡
3
𝑡
4
𝑡
5
𝑡
1
𝑡
6
V
39.8
40
40.1
40.2
40.1
100
101.5
104
105
106
1 0
ID
𝑆
1
𝑆
1
𝑆
1
𝑆
1
𝑆
1
𝑆
2
𝑆
2
𝑆
2
𝑆
2
𝑆
2
𝑆
3
𝑆
3
Figure 3: Concatenated data structure defined as Triplet-
Stream.
Triplet-Stream ensures separability of the vertically
stacked unequally spaced measurements by the third
column named as ID. Therefore, each time series gets
a unique indicator information. The original and raw
time information is given within column T . The val-
ues of the time series are represented by the column
V .
For a supervised machine learning problem we
can then define a dataset D = {(Z
k
,l
k
)|k ∈ N
+
}.
Where each sample is described by the label infor-
mation l (the label is dataset and use-case depen-
dent) and by the feature representation Z. The fea-
ture representation Z can further be formulated as
Z = {(t
i
,v
i
,s
i
)|i ∈ N
+
}. The index i defines the
recording (row) of the feature space and t the time
where the value v was measured for the signal indica-
tor s respectively.
3.4 The Ways of Encoding
The usage of a signal indicator and thus the unam-
biguous assignment of an ID to each measurement
leads to the problem of encoding the ID. The most
statistical models and the most established DNNs pro-
cess numerical data and numerical representations of
features.
The sensor ID can be interpreted as categorical
(string) variable. In the context of tabular data, a cat-
egorical variable can be of nominal or ordinal nature
(Cerda et al., 2018). Categorical data of ordinal na-
ture are classes which can be transferred to a scalable
and finite numerical system. Otherwise, a categori-
cal variable can be nominal, such as the gender of a
person is a nominal category. (Cerda et al., 2018) for-
mulated that categorical variables of a tabular data are
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
690

standardized when the dataset is defined completely.
In this context, standardization can be understood as a
state, where the categories of the categorical variable
are known a-priori, finite and mutually exclusive. In
a non-standardized tabular dataset the categories of a
categorical variable are not known a-priori.
Within the statistical analysis the problem arises,
when models have to process unknown nominal cate-
gories of a new collected dataset. The identification,
whether a new category belongs to an already exist-
ing entity or whether the new category describes a
completely new entity is challenging and problematic
(Cerda et al., 2018; Cerda and Varoquaux, 2022).
To solve this problem, different algorithms have
been developed to convert the categorical classes to a
numerical feature representation to ensure separabil-
ity between categories. In principle, those algorithms
can be divided into two approaches. Firstly, Con-
stant Encoding, where the categorical variable is con-
verted to a constant numerical representation. Sec-
ondly, Similarity Encoding, where each category gets
a trainable representation.
As constant encoding, such as One-Hot-Encoding
(OHE), does not depict the similarity between words
such as book and publication, algorithms have been
developed to encode numerical similarity based on
distances. For example, Word-Embeddings of fixed
size, implemented as initial layer for categorical vari-
ables, can be trained in a supervised fashion in DNNs
to obtain the best suited encoded representation (Guo
and Berkhahn, 2016).
3.5 The Method
In our method, the Triplet-Stream is processed by
DNNs, which are capable to process variable fea-
ture spaces. For this, the modality indicators need to
be encoded. The categories of the analyzed datasets
are finite, mutually exclusive and known a-priori.
Due to the disadvantages of Constant Encoding al-
gorithms, we choose the Word-Embedding approach
introduced by (Guo and Berkhahn, 2016), cf. Section
3.4. Thereby, the embedding size can be considered
as further hyperparameter.
The method we propose is shown in Figure 4.
It can be seen that the modality indicators are pro-
cessed by the trainable Embedding-Network in ad-
vance. Subsequently, the encoded categories are con-
catenated with the original time and value informa-
tion. The combined representation is then processed
by the prediction network. To identify, which DNN
architecture is best suited as Prediction Head, cf. Fig-
ure 4, we evaluate the GRU network designed by (Cho
et al., 2014) and the InceptionTime network designed
Time Value
ID
…
Prediction
Head
NN
Figure 4: The generic Deep Neural Network (DNN)-
Architecture for MaTS.
by (Fawaz et al., 2020). The GRU-based approach
is referred to as GRU-Triplet-Stream (GRUTS) and
the InceptionTime-based approach is referred to as
InceptionTime-Triplet-Stream (ITTS).
GRU based models have shown promising results
applied on MaTS datasets (Che et al., 2018). In con-
trast, the performance of the InceptionTime network
applied to MaTS datasets has barely been studied.
The InceptionTime network is designed modular with
the help of blocks. To overcome the vanishing gra-
dient problem residual connections are used. Each
block consists of a dimension-reducing bottleneck
layer and convolution layers with different kernel-
sizes. The different kernel-sizes generate a broader
and improved field-of-vision. Subsequently, the out-
puts of the convolution layers are concatenated with
the output of a MaxPool layer, which is applied to
the input of the block. Following the last inception
block a global average pooling is applied to generate
a fixed dimensional space which is forwarded to a lin-
ear layer. The amount of blocks, the size of kernels
but also the amount of bottleneck channels are impor-
tant hyperparameters of the model.
4 EXPERIMENT
In the experiments we evaluated the GRUTS and the
ITTS on two irregular sampled and asynchronous
multivariate time series datasets: The first one is a bi-
nary classification task based on the PhysioNet-2012
dataset and the second one is a regression task based
on the Vehicle Engine Component Aging (VECA)
dataset.
Data Streams: Investigating Data Structures for Multivariate Asynchronous Time Series Prediction Problems
691

4.1 Datasets
The PhysioNet-2012 Challenge dataset contains
12000 Intensive Care Unit (ICU) admissions (Gold-
berger et al., 2000; Silva et al., 2012). At the be-
ginning, only 4000 ICU admissions possessed labels
(named as Set-a). The dataset was extended over the
past few years, which results in currently ∼ 12000 la-
beled ICU admissions. Each patient was admitted to
one of a variety of ICUs for e.g. medical, trauma and
surgical reasons. The ICU stay of the patient needed
to last at least 48 hours, otherwise the patients have
been excluded from the dataset. The dataset contains
41 variables of which five generic descriptors are only
measured once such as the age and the weight of the
patient. The remainder of 36 variables represents time
series with multiple observations. Each observation
got a time stamp which describes the time, which has
passed since the initial admission of the individual pa-
tient. Five outcome descriptors are available in the
dataset such as length of stay or length of survival.
Within this study we focused on the in-hospital mor-
tality (1:=died; 0:=survived). This led to a dataset,
which is strongly imbalanced. Less than 15% of the
labeled ICU stays are positive.
To be comparable to the work of (Rubanova et al.,
2019; Shukla and Marlin, 2021), we chose the Set-
a with 4000 labeled patients as the first benchmark
dataset. We refer to this as PhysioNet-a dataset. To
further be comparable to the work of (Horn et al.,
2020), we created a second benchmark dataset from
the whole 12000 labeled patients and applied the
same train-test-split as (Horn et al., 2020). We refer
to this as PhysioNet-b dataset.
The Vehicle Engine Component Aging dataset has
been introduced by (Sass et al., 2019). The com-
ponent under investigation was the Exhaust Gas Re-
circulation (EGR) cooling system. The EGR system
is used in diesel engines to regulate the combustion
temperature within the combustion chamber. The ag-
ing represents the degree of pollution of the EGR-
cooler. The investigated degree of aging of the pro-
totype in the development stage is detected in service
intervals by measuring the fresh air mass flow once
with enabled EGR-system ˙m
open
and once with dis-
abled EGR-system ˙m
closed
. The aging over time is
then defined as mass flow ratio ˙m
r
= ˙m
open
/ ˙m
closed
.
While utilizing interpolation, the aging in the range
of (0, 1) is continuously defined over the whole inves-
tigated time span.
The corresponding vehicle data are one dimen-
sional in-vehicle sensor information recorded within
the time of component aging. With respect to the
investigation of (Sass et al., 2020), who identified
and classified the importance of sensors to monitor
the aging, we selected the seven most relevant sen-
sors. Based on the properties of the underlying bus-
network, the multivariate time series space is asyn-
chronous as asynchronicity has been defined in Sec-
tion 1. Furthermore, we increased the effect of asyn-
chronicity and reduced the size of the MaTS space
to 49.16 % of the original allocated size with the use
of the Binary Shift Compression (BiSCo) algorithm
(lossless configuration) introduced by (Vox et al.,
2022).
The total component aging dataset contains seven
unevenly spaced time series as features and one la-
bel time series, which describes the aging. In total,
the encoded dataset is defined by 29.883.593 obser-
vations over the multivariate time series space. How-
ever, the technical requirement of a minute-by-minute
prediction of component aging leads to 38.426 la-
beled samples which we created with a sliding win-
dow approach. Furthermore, we took the last aging
information within the window to label the sample.
4.2 Competitors
As competitors we have chosen models which have
shown suitable properties to process asynchronous
vehicle sensor data. These models are listed below:
• The Phased-LSTM model (Neil et al., 2016)
• The GRU-D model (Che et al., 2018)
• The L-ODE-ODE model (Rubanova et al., 2019)
• The IPNet model (Shukla and Marlin, 2019)
• The SeFT model (Horn et al., 2020)
• The mTAND model (Shukla and Marlin, 2021)
All models are described in detail in Section 2.
4.3 Experimental Setup
All experiments have been written in the program-
ming language Python, where we used the PyTorch
and the Tensorflow framework (Abadi et al., 2016;
Paszke et al., 2019). All experiments are executed
with a GPU of type NVIDIA Tesla K80, which
has access to 6 cores and 56 GB of RAM. Further-
more, we used the Adam optimizer during learn-
ing phase for all Triplet-Stream experiments (Kingma
and Ba, 2015). To find the best hyperparameter
configuration for the problems under investigation
we used a Bayesian optimization approach called
Heteroscedastic Evolutionary Bayesian Optimisation
(HEBO) (Cowen-Rivers et al., 2022). HEBO has
shown outstanding performance on a benchmark
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
692

dataset compared to other hyperparameter optimiza-
tion algorithms (Turner et al., 2021). For repro-
ducibility, the best hyperparameters of the individual
models for the two benchmark datasets are presented
in the APPENDIX.
4.4 Classification Results
Due to the imbalanced PhysioNet datasets
(PhysioNet-a and PhysioNet-b) we used the Area
Under the Receiver Operating Characteristic
Curve (AUROC) score instead of the binary accuracy
to compare the classification performance. The ITTS
and the GRUTS model have been trained with the
cross-entropy loss. Thereby, we applied a mini-batch
stochastic training approach. Also, we evaluated the
classification performance of the test dataset for each
epoch. Through an extensive hyperparameter search
we identified the best model configurations and
simulated them ten times, for which the performance
(mean and standard deviation) is shown in Table 1.
The best model configurations are listed in Table 4
and 5 in the APPENDIX. It can be seen from the
Table 1: Visualization of the classification performance for
medical health prediction problems.
Model AUROC
PhysioNet-a PhysioNet-b
GRU-D 0.818 ± 0.008
*
0.863 ± 0.003
†
Phased-LSTM 0.836 ± 0.003
*
0.790 ± 0.010
†
IPNet 0.819 ± 0.006
*
0.860 ± 0.002
†
SeFT 0.795 ± 0.015
*
0.851 ± 0.004
†
L-ODE-ODE 0.829 ± 0.004
*
0.857 ± 0.006
†
mTAND 0.854 ± 0.001
*
-
ITTS 0.801 ± 0.014 0.828 ±0.003
GRUTS 0.834 ± 0.004 0.857 ± 0.002
*
Published by (Shukla and Marlin, 2021)
†
Published by (Horn et al., 2020)
table that the mTAND model reached the highest
classification performance for the PhysioNet-a
dataset. It is worth noting that we were not able to
reproduce the published accuracy of the mTAND
model, which deviated in our experiments by ap-
proximately two percentage points to 0.83. For the
PhysioNet-b dataset the GRU-D model reached the
highest AUROC score.
From the results it can be taken that the GRUTS
approach achieved a classification performance com-
parable to advanced attention models and compa-
rable to modified recurrent networks such as the
GRU-D. Also, for the more transparent results of the
PhysioNet-b benchmark the GRUTS model deviated
only by 0.6 percentage points, which is interesting
due to the fact that (Che et al., 2018) compared dif-
ferent GRU based methods on MaTS prediction prob-
lems and showed that their GRU-D model outper-
formed standard GRUs significantly. Moreover, from
the results it can be taken that the ITTS approach
did not perform well on the PhysioNet classification
benchmarks.
4.5 Regression Results
To be able to fairly compare the performance for
the VECA regression task of the individual models
a train-test-split of 80%-20% has been applied to the
VECA dataset. We excluded the L-ODE-ODE model
because of the escalating training time per epoch
caused by the ODE-solver, which made a fair com-
parison by an appropriate hyperparameter tuning im-
possible. Within the mini-batch based learning al-
gorithm we used the Mean-Squared-Error (MSE) as
loss term. All investigated models have been exten-
sively hyperparameter tuned with HEBO, where we
used the model implementations of (Horn et al., 2020)
and (Shukla and Marlin, 2021). The resulting optimal
hyperparameters are depicted in Table 6 in the AP-
PENDIX. Furthermore, the regression performance of
the best hyperparameter configuration for each model
under investigation is shown in Table 2. The simula-
tion for each model has been repeated three times to
present the RMSE with mean and standard deviation.
From the results of the regression benchmark it can be
seen that the GRUTS model reached the best perfor-
mance while the ITTS model enabled a more stable
convergence based on the lower standard deviation
with a comparable RMSE as the GRUTS. Without
forcing the hyperparameter tuning algorithm to search
for small models, the model with the lowest capacity
and thus with the lowest number of trainable param-
eters is the IPNet model. If the epoch time quality
characteristic is considered, then the SeFT model is
the fastest model which we evaluated. While taking
into account the RMSE, the epoch time and the ca-
pacity holistically the most suited model to solve the
regression problem is the ITTS approach due to the
Pareto optimum of the three quality measures.
4.6 Ablation Study
Besides the model size the sample data structure and
the resulting array size in the main memory is a fur-
ther important criterion for embedded devices such as
vehicles and batch based training on graphic cards.
Hence, we investigated the amount of bytes which
have to be allocated for the data structures of Section
3.
Data Streams: Investigating Data Structures for Multivariate Asynchronous Time Series Prediction Problems
693

Table 2: Visualization of the regression performance defined as Root-Mean-Squared-Error (RMSE) (mean ± std), the mean
epoch time in seconds and the model capacity defined as trainable parameters. The RMSE evaluation metric was multiplied
by 1000 to improve readability.
Model RMSE Capacity Epoch Time
Model
Impl.
Phased-LSTM 1.736 ± 0.337 482,305 6395.84 (Horn et al., 2020)
*
GRU-D 3.214 ± 0.598 49,695 6740.68 (Horn et al., 2020)
*
IPNet 3.304 ± 0.510 15,057 2095.66 (Horn et al., 2020)
*
SeFT 2.933 ± 0.817 122,033 56.88 (Horn et al., 2020)
*
mTAND 3.367 ± 1.228 105,733 1886.58 (Shukla and Marlin, 2021)
†
ITTS 1.301 ± 0.082 82,094 138.11 cf. Section 3.5
†
GRUTS 1.250 ± 0.450 108,064 437.80 cf. Section 3.5
†
*
Tensorflow v2.9.1;
†
PyTorch v1.12
In Table 3 the data structures are linked to the
model implementations. Moreover, the table shows
the mean sample size in Bytes of 30 randomly se-
lected samples of the VECA dataset. It can be seen
that the interpolation based data structure (a
1
) results
in a sample size which is by a factor of 1000 bigger
than the other data structures. To ensure that each sen-
sor information is represented without loss of infor-
mation, we used an interpolation frequency of 10 Hz.
Likewise, the standard deviation of the interpolated
data structure is noteworthy because a few of the sam-
ples allocated more than 1 GB. Thus, the interpolated
data structure is rather inappropriate. The mean value
imputed data structure is approximately 50% smaller
than the masked data structure, which is caused by
the additional mask. Also, it can be taken from the ta-
ble that the Triplet-Stream data structure is the second
smallest. In comparison to the masked data structure,
the Triplet-Stream reduced the needed memory space
by approximately 80%.
4.7 Discussion
In the experiments we showed that the Triplet-Stream
combined with CNN and RNN prediction heads can
compete and even outperform state-of-the-art atten-
tion and recurrent models in the domain of MaTS. We
showed that an efficient data structure and a suitable
encoding of modality indicators enabled high perfor-
mance of general purpose DNNs in the classification
task and in the regression task.
For the classification task we used the published
results of (Shukla and Marlin, 2021), because we
were not able to reproduce them. Nevertheless, the
GRUTS approach obtained sufficient performance
within the classification benchmark. In the regression
benchmark we showed that the Triplet-Stream is an
efficient method for vehicle sensor data based regres-
sion problems.
5 CONCLUSION
In this paper we elaborated a need for research for
processing MaTS in DNNs. Therefore, we devel-
oped the Triplet-Stream, which is a lightweight data-
structure without missingness indicators or value im-
putation strategies. Thus, we did not change the raw
sensor data distribution, to minimize data based bias.
We combined the Triplet-Stream with an embedding
stage and a subsequent prediction head. As prediction
heads we evaluated the GRU model and the Incep-
tionTime model. The GRUTS and the ITTS as well
as other relevant models were benchmarked on a re-
gression problem and on a classification problem.
The evaluation has shown that the GRUTS model
achieved excellent performance on the classification
problem. Furthermore, the Triplet-Stream based
models outperformed existing state-of-the-art models
on the regression dataset. The ITTS model achieved
Pareto-optimal results regarding the quality measures
accuracy, training time per epoch, model capacity and
sample size. Consequently, we demonstrated an ap-
propriateness of our method to enable a sustainable
application of deep learning. Based on these results,
the Triplet-Stream approach should further be stud-
ied and analyzed on different multivariate time series
based prediction problems.
In future work, we will continue the investigation
of suitable data structures for DNNs. We will evaluate
their impact on the model size for vehicle sensor data
based prediction problems. Also, we will study the
impact of processing synchronous time series with the
Triplet-Stream and compare the results to the standard
approach. Likewise, we will extend the investigation
to vehicle fleets and analyze the energy demand of
DNNs. Through this, we want to evaluate the energy
consumption of models when they are fully deployed.
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
694

Table 3: Combining the data structures of Figure 2 and Figure 3 with the models under investigation and the resulting VECA
sample size.
Data Structure Sample Size in Byte Model
Interpolated (a
1
) 4.017e8 ± 1.060e9 -
Imputed (a
2
) 4.591e4 ± 3.647e4 -
Masked (b) 8.608e4 ± 7.837e4
SeFT, IPNet, mTAND
GRU-D, Phased-LSTM
Raw (c) 1.148e4 ± 9.116e3 -
Triplet-Stream 1.722e4 ± 1.367e4 GRUTS, ITTS
DISCLAIMER
The results, opinions, and conclusions expressed in
this publication are not necessarily those of Volkswa-
gen Aktiengesellschaft.
REFERENCES
Abadi, M., Barham, P., Chen, J., Chen, Z., Davis, A., Dean,
J., Devin, M., Ghemawat, S., Irving, G., Isard, M.,
et al. (2016). Tensorflow: A system for large-scale
machine learning. In 12th USENIX Symposium on
Operating Systems Design and Implementation (OSDI
16), pages 265–283.
Cerda, P. and Varoquaux, G. (2022). Encoding high-
cardinality string categorical variables. IEEE
Transactions on Knowledge and Data Engineering,
34(3):1164–1176.
Cerda, P., Varoquaux, G., and K
´
egl, B. (2018). Similarity
encoding for learning with dirty categorical variables.
Machine Learning, 107(8-10):1477–1494.
Che, Z., Purushotham, S., Cho, K., Sontag, D., and Liu,
Y. (2018). Recurrent neural networks for multivari-
ate time series with missing values. Scientific reports,
8(1):6085.
Cho, K., van Merrienboer, B., Gulcehre, C., Bahdanau, D.,
Bougares, F., Schwenk, H., and Bengio, Y. (2014).
Learning phrase representations using rnn encoder–
decoder for statistical machine translation. Proceed-
ings of the 2014 Conference on Empirical Methods in
Natural Language Processing, EMNLP, pages 1724–
1734.
Cowen-Rivers, A. I., Lyu, W., Tutunov, R., Wang, Z.,
Grosnit, A., Griffiths, R. R., Maraval, A. M., Jianye,
H., Wang, J., and Peters, J. (2022). Hebo: push-
ing the limits of sample-efficient hyper-parameter op-
timisation. Journal of Artificial Intelligence Research,
74:1269–1349.
Fawaz, H. I., Lucas, B., Forestier, G., Pelletier, C., Schmidt,
D. F., Weber, J., Webb, G. I., Idoumghar, L., Muller,
P.-A., and Petitjean, F. (2020). Inceptiontime: Finding
alexnet for time series classification. Data Mining and
Knowledge Discovery, 34(6):1936–1962.
Futoma, J., Hariharan, S., and Heller, K. (2017). Learn-
ing to detect sepsis with a multitask gaussian process
rnn classifier. International Conference on Machine
Learning, ICML, 34:1174–1182.
Goldberger, A. L., Amaral, L. A. N., Glass, L., Hausdorff,
J. M., Ivanov, P. C., Mark, R. G., Mietus, J. E., Moody,
G. B., Peng, C.-K., and Stanley, H. E. (2000). Phys-
iobank, physiotoolkit, and physionet: Components of
a new research resource for complex physiologic sig-
nals. Circulation, 101(23):215–220.
Guo, C. and Berkhahn, F. (2016). Entity embeddings of cat-
egorical variables. arXiv preprint arXiv:1604.06737.
Hewamalage, H., Bergmeir, C., and Bandara, K. (2021).
Recurrent neural networks for time series forecast-
ing: Current status and future directions. International
Journal of Forecasting, 37(1):388–427.
Hochreiter, S. and Schmidhuber, J. (1997). Long short-term
memory. Neural computation, 9(8):1735–1780.
Horn, M., Moor, M., Bock, C., Rieck, B., and Borgwardt,
K. (2020). Set functions for time series. International
Conference on Machine Learning, ICML, 37:4353–
4363.
Kingma, D. P. and Ba, J. (2015). Adam: A method for
stochastic optimization. International Conference on
Learning Representations, ICLR, 3.
Li, S. C.-X. and Marlin, B. (2016). A scalable end-to-
end gaussian process adapter for irregularly sampled
time series classification. International Conference
on Neural Information Processing Systems, 30:1812–
1820.
Lipton, Z., Kale, D., and Wetzel, R. (2016). Modeling miss-
ing data in clinical time series with rnn. Proceedings
of Machine Learning for Healthcare 2016.
Little, R. J. A. and Rubin, D. B. (2019). Statistical analysis
with missing data, volume 793. John Wiley & Sons.
Ma, J., Shou, Z., Zareian, A., Mansour, H., Vetro, A., and
Chang, S.-F. (2019). Cdsa: Cross-dimensional self-
attention for multivariate, geo-tagged time series im-
putation. arXiv preprint arXiv:1905.09904.
Neil, D., Pfeiffer, M., and Liu, S.-C. (2016). Phased
lstm: Accelerating recurrent network training for long
or event-based sequences. International Conference
on Neural Information Processing Systems, 30:3889–
3897.
Paszke, A., Gross, S., Massa, F., Lerer, A., Bradbury, J.,
Chanan, G., Killeen, T., Lin, Z., Gimelshein, N.,
Antiga, L., Desmaison, A., Kopf, A., Yang, E., De-
Vito, Z., Raison, M., Tejani, A., Chilamkurthy, S.,
Steiner, B., Fang, L., Bai, J., and Chintala, S. (2019).
Pytorch: An imperative style, high-performance deep
learning library. Advances in Neural Information Pro-
cessing Systems, 32:8024–8035.
Data Streams: Investigating Data Structures for Multivariate Asynchronous Time Series Prediction Problems
695

Rabiner, L. R. (1989). A tutorial on hidden markov models
and selected applications in speech recognition. Pro-
ceedings of the IEEE, 77(2):257–286.
Ramati, M. and Shahar, Y. (2010). Irregular-time bayesian
networks. Conference on Uncertainty in Artificial In-
telligence, UAI, 26.
Rasmussen, C. E. and Williams, C. K. I. (2006). Gaussian
Processes for Machine Learning. MIT Press.
Rubanova, Y., Chen, R. T. Q., and Duvenaud, D. (2019).
Latent odes for irregularly-sampled time series. Ad-
vances in Neural Information Processing Systems, 32.
Sass, Andreas Udo, Esatbeyoglu, E., and Fischer, T.
(2019). Monitoring of powertrain component aging
using in-vehicle signals. Diagnose in mechatronis-
chen Fahrzeugsystemen XIII, pages 15–28.
Sass, Andreas Udo, Esatbeyoglu, E., and Iwwerks, T.
(2020). Signal pre-selection for monitoring and pre-
diction of vehicle powertrain component aging. Pro-
ceedings of the 16th European Automotive Congress,
pages 519–524.
Schwartz, R., Dodge, J., Smith, N. A., and Etzioni, O.
(2020). Green ai. Communications of the ACM,
63(12):54–63.
Shih, S.-Y., Sun, F.-K., and Lee, H.-y. (2019). Temporal
pattern attention for multivariate time series forecast-
ing. Machine Learning, 108(8-9):1421–1441.
Shukla, S. and Marlin, B. (2019). Interpolation-prediction
networks for irregularly sampled time series. In-
ternational Conference on Learning Representations,
ICLR, 7.
Shukla, S. N. and Marlin, B. M. (2021). Multi-time atten-
tion networks for irregularly sampled time series. In-
ternational Conference on Learning Representations,
ICLR, 9.
Silva, I., Moody, G., Scott, D. J., Celi, L. A., and Mark,
R. G. (2012). Predicting in-hospital mortality of icu
patients: The physionet/computing in cardiology chal-
lenge 2012. In 2012 Computing in Cardiology, pages
245–248.
Song, H., Rajan, D., Thiagarajan, J. J., and Spanias, A.
(2018). Attend and diagnose: Clinical time series
analysis using attention models. Proceedings of the
AAAI conference on artificial intelligence, 32(1).
Sun, C., Hong, S., Song, M., and Li, H. (2020). A review of
deep learning methods for irregularly sampled medi-
cal time series data. arXiv preprint arXiv:2010.12493.
Szegedy, C., Vanhoucke, V., Ioffe, S., Shlens, J., and Wojna,
Z. (2016). Rethinking the inception architecture for
computer vision. Proceedings of the IEEE conference
on computer vision and pattern recognition.
Turner, R., Eriksson, D., McCourt, M., Kiili, J., Laaksonen,
E., Xu, Z., and Guyon, I. (2021). Bayesian optimiza-
tion is superior to random search for machine learn-
ing hyperparameter tuning: Analysis of the black-box
optimization challenge 2020. NeurIPS 2020 Compe-
tition and Demonstration Track, pages 3–26.
Vaswani, A., Shazeer, N., Parmar, N., Uszkoreit, J., Jones,
L., Gomez, A. N., Kaiser, L., and Polosukhin, I.
(2017). Attention is all you need. Advances in Neural
Information Processing Systems, 30.
Vox, C., Broneske, D., Piewek, J., Sass, A. U., and Saake,
G. (2022). Integer time series compression for holistic
data analytics in the context of vehicle sensor data. In
International Conference on Connected Vehicle and
Expo (ICCVE), pages 1–7.
Weerakody, P. B., Wong, K. W., Wang, G., and Ela, W.
(2021). A review of irregular time series data handling
with gated recurrent neural networks. Neurocomput-
ing, 441(7):161–178.
Wu, S., Liu, S., Sohn, S., Moon, S., Wi, C.-I., Juhn, Y.,
and Liu, H. (2018). Modeling asynchronous event se-
quences with rnns. Journal of biomedical informatics,
83:167–177.
Yang, B., Sun, S., Li, J., Lin, X., and Tian, Y. (2019). Traffic
flow prediction using lstm with feature enhancement.
Neurocomputing, 332(4):320–327.
Zaheer, M., Kottur, S., Ravanbakhsh, S., Poczos, B.,
Salakhutdinov, R. R., and Smola, A. J. (2017). Deep
sets. Advances in Neural Information Processing Sys-
tems, 30.
APPENDIX
Table 4: Classification Benchmark I.
Best hyperparameters for the PhysioNet-a dataset
ITTS: n-blocks=3, bottleneck-channels=2, n-filters=12, kernel-
sizes=[4, 8, 16], activation=hardswish, out-activation=sigmoid, n-
embeddings=15, linear-hidden=[256], use-residual=True, min-max-
scaling=False; GRUTS: rnn-hidden=55, rnn-depth=5, activation=gelu,
linear-hidden=[65, 33], n-embeddings=69, min-max-scaling=False
Table 5: Classification Benchmark II.
Best hyperparameters for the PhysioNet-b dataset
ITTS: n-blocks=1, bottleneck-channels=12, n-filters=16, kernel-
sizes=[4, 8, 16], activation=tanh, out-activation=linear, n-
embeddings=20, linear-hidden=[128], use-residual=True, min-
max-scaling=False; GRUTS: rnn-hidden=235, rnn-depth=7,
activation=tanh, linear-hidden=[424], n-embeddings=176, min-
max-scaling=False
Table 6: Regression Benchmark.
Best hyperparameters for the VECA dataset
Phased-LSTM: n-units=256, use-peepholes=True, leak=0.001,
period-init-max=1000.0; GRU-D: n-units=120, dropout=0.0,
recurrent-dropout=0.01; IPNet: n-units=60, dropout=0.0, recurrent-
dropout=0.1, imputation-stepsize=1.0, reconst-fraction=0.01; SeFT:
n-phi-layers=1, phi-width=165, phi-dropout=0.0, n-psi-layers=3,
psi-width=28, psi-latent-width=121, dot-prod-dim=90, n-heads=7,
attn-dropout=0.1, latent-width=40, n-rho-layers=4, rho-width=24, rho-
dropout=0.0, n-positional-dims=4, max-timescale=100.0; mTAND:
query-steps=196, rec-hidden=94, embed-time=88, num-heads=4,
freq=9, learn-emb=True, regressor-layer-size=134; ITTS: n-
blocks=6, bottleneck-channels=2, n-filters=13, kernel-sizes=[4,
32, 128], activation=relu, out-activation=sigmoid, n-embeddings=1,
linear-hidden=[256], use-residual=True, min-max-scaling=True;
GRUTS: rnn-hidden=64, rnn-depth=5, activation=hardswish, linear-
hidden=[128, 64, 32, 16], n-embeddings=1, min-max-scaling=True
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
696
