
Printed Packaging Authentication: Similarity Metric Learning for
Rotogravure Manufacture Process Identification
Tetiana Yemelianenko
1
, Alain Tr
´
emeau
2
and Iuliia Tkachenko
1
1
Univ. Lyon, Univ Lyon 2, CNRS, INSA Lyon, UCBL, LIRIS, UMR 5205, F-69676 Bron, France
2
Univ. Lyon, UJM-Saint-Etienne, Laboratoire Hubert Curien UMR CNRS 5516, F-42023 St-Etienne, France
Keywords:
Rotogravure Press Identification, Press Forensics, Printed Support Forensics, Medicine Blister Authentication.
Abstract:
The number of medicine counterfeits increases each year due to the accessibility of printing devices and the
weak protection of medicine blister foils. The medicine blisters are often produced using the rotogravure
printing process. In this paper, we address the problem of rotogravure press identification and printed sup-
port identification using similarity metric learning. Both identification problems are difficult as the impact of
printing press or of printing support are minimal, moreover the classical techniques (for example, the use of
Pearson correlation) cannot identify the rotogravure press or the printing support used for the packaging pro-
duction. We show that the similarity metric learning can easily identify the press used and the printing support
used. Additionally, we explore the possibility to use the proposed approach for packaging authentication.
1 INTRODUCTION
The World Health Organization argues that 1-in-10
medicines in lower-and middle-income countries are
falsified or substandard
1
. This fact is worrying as the
medicine counterfeits may have a significant impact
on human health and life.
Unfortunately the existing anti-counterfeiting tech-
niques are either too expensive to be inserted in the
medicine packaging or too complicated to be verified
by non-professionals. Additionally, due to interna-
tional regulations and costs, the pharmaceutical com-
panies prefer to use a minimal graphical design (Davi-
son, 2011). Finally, due to big printing amounts, the
majority of medicine packaging is printed using the
rotogravure printing process, that is one of the cheap-
est and fasten processes.
The rotogravure printing process has some spe-
cific characteristics that can be used in forensics
(Tkachenko et al., 2019; Tkachenko et al., 2020).
Therefore, the forensics based solutions are very
promising and can easily be used to protect and to
authenticate pharmaceutical printed packaging.
One of such solutions, developed for authentication
of medicine blister foils printed using rotogravure
process, is based on the use of a regular test pat-
1
https://apps.who.int/iris/bitstream/handle/10665/
270662/PMC2855605.pdf?sequence=1&isAllowed=y
tern (Tkachenko et al., 2022). Thanks to this reg-
ular test pattern, the authors showed that it is pos-
sible to identify medicine packaging printed using a
specific cylinder engraving process (engraved using
chemical etching, see Section 2 for more details). The
authors used two approaches based on Pearson corre-
lation and Non-Negative Least Squares (NNLS) clas-
sifier to identify a set of samples printed using two
chemically engraved cylinders. Nevertheless, it was
shown that these approaches cannot differentiate sam-
ples printed using a same engraved cylinder but with
different presses.
In this paper, we want to explore this problem, i.e. the
identification of rotogravure press used. We propose
to use the similarity metric learning (Duffner et al.,
2021), which has shown its efficiency in biometric
applications (as face and signature identification) for
rotogravure press identification. The contributions of
this paper are the following:
1. We explored the efficiency of similarity met-
ric learning for the rotogravure printing process
forensics.
2. We enlarged the database introduced in
(Tkachenko et al., 2022) by adding samples
printed on strips using electro-mechanically
engraved cylinder
2
. To the best of our knowledge,
2
The data set is publicly available at https://gitlab.liris.
cnrs.fr/rotogravure-printing/regular-pattern-dataset.
Yemelianenko, T., Trémeau, A. and Tkachenko, I.
Printed Packaging Authentication: Similarity Metric Learning for Rotogravure Manufacture Process Identification.
DOI: 10.5220/0011728700003417
In Proceedings of the 18th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2023) - Volume 4: VISAPP, pages
905-911
ISBN: 978-989-758-634-7; ISSN: 2184-4321
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
905
electro-mechanical samples have never be con-
sidered in other studies in the field of medicine
blister authentication.
3. We studied the impact of electro-mechanical en-
graving process, and the possibility to identify the
press used, from a set of samples printed using
electro-mechanically engraved cylinders. It is a
quite challenging case, as the electro-mechanical
engraving process is well controlled and, thus,
printed samples have less individual imperfec-
tions.
4. We studied the impact of the printing support used
(strip - thicker aluminium foil and blister - thinner
aluminium foil). We explored the possibility to
identify the printing support while the engraved
cylinder and the rotogravure press are identical.
The rest of this paper is organized as follows. The
description of the rotogravure printing process and its
characterization are discussed in Section 2. The pro-
posed identification system is presented in Section 3.
The experimental results are shown in Section 4. We
discuss the possibility to use the proposed identifi-
cation approach for packaging authentication in Sec-
tion 5. Finally, we conclude this work in Section 6.
2 ROTOGRAVURE PRINTING
PROCESS
Rotogravure printing is currently used for packaging
manufacturing thanks to its fast and relatively cheap
printing process. The rotogravure printing process
differs a lot from other printing processes commonly
used (using for example laser or inkjet printers).
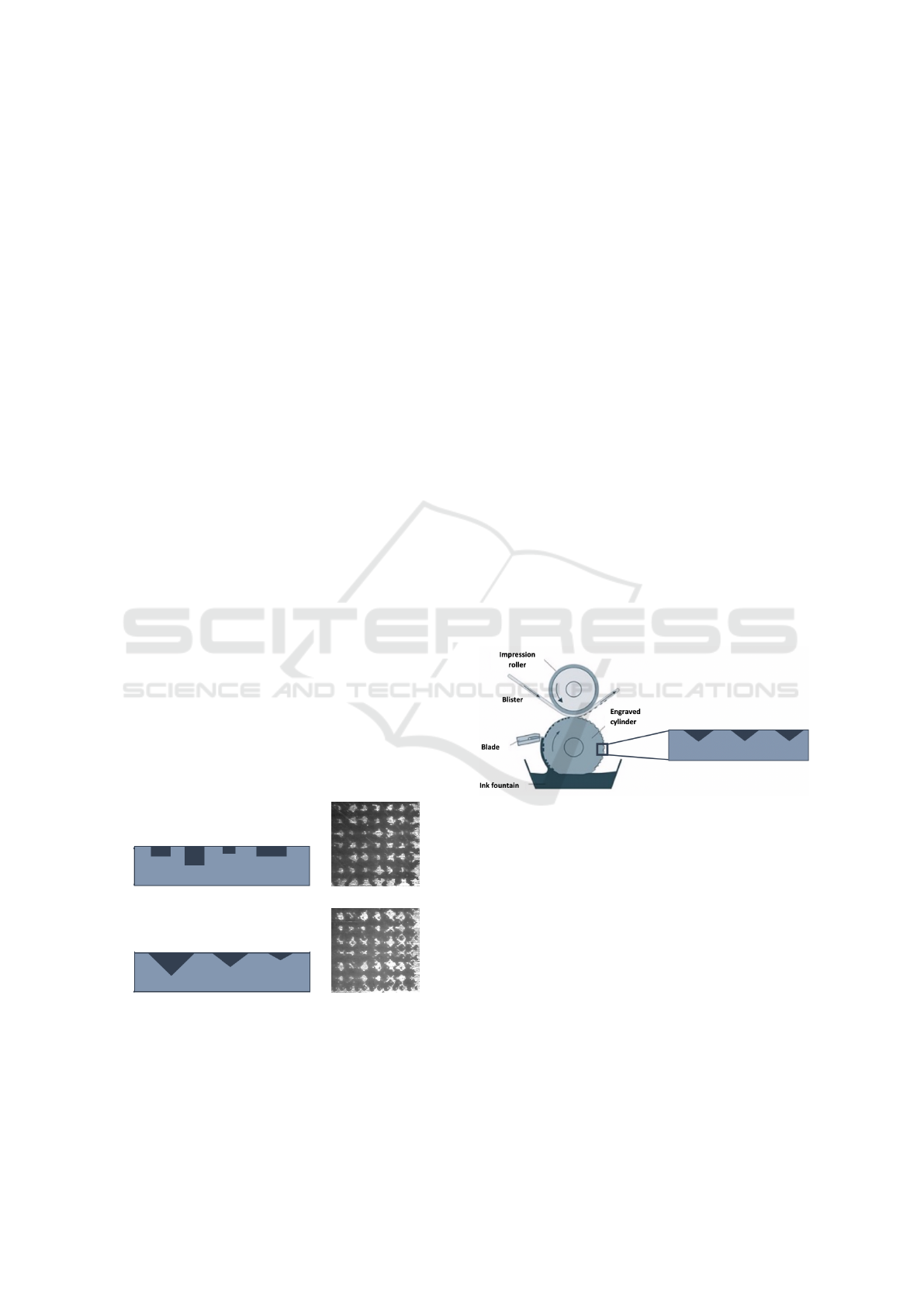
(a) (b)
(c) (d)
Figure 1: An illustration of: a) a cylinder engraved by
chemical etching; b) a regular test pattern (P
1
C
1
s) printed
using a chemically engraved cylinder; c) a cylinder en-
graved by electro-mechanical etching; d) a regular test pat-
tern (P
1
M
1
s) printed using a cylinder engraved by electro-
mechanical etching.
To print a packaging using the rotogravure printing
process, we need to follow the following steps:
1. Design an artwork considering specific engraving
parameters (as width of lines, dot shapes, color
orders, etc.) and using a specific graphic editor
software.
2. Engrave a cylinder using the designed artwork.
Depending of the type of engraving process
(chemical etching, electro-mechanical or laser en-
graving), the shape of printed dots and the qual-
ity of images will differ. For example, the sharp-
ness of edges in electro-mechanical engraving is
ensured by the cells with different depths and ar-
eas, meanwhile all cells have the same pyramid
shape (see Fig. 1.c). In the case of chemical etch-
ing, sharper edges are obtained thanks to engraved
half-dots (see Fig. 1.a).
3. Print the artwork on a chosen support using the
engraved cylinder. The rotogravure printing pro-
cess is split on color units. One color unit, illus-
trated in Fig 2, consists of an engraved cylinder,
a press and a pan of ink. After the ink transfer
from cylinder cells to the printing support, the ink
is dried using high velocity air nozzle dryer.
More details about the rotogravure printing process
can be found in (Kipphan, 2001). Rotogravure print-
Figure 2: The printing process using rotogravure. Cylinder
cells illustrated correspond to a electro-mechanical engrav-
ing.
ing has some particular characteristics and imper-
fections (Tkachenko et al., 2019) that can be used
in manufacturing process identification (Tsai et al.,
2019; Joshi et al., 2020) and packaging authenti-
cation (Nguyen et al., 2021). In this paper, we
propose to use the regular test pattern introduced
in (Tkachenko et al., 2022) printed using cylinders
engraved by chemical etching (Fig. 1.b) and using
electro-mechanically engraved cylinders (Fig. 1.d).
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
906
3 PROPOSED IDENTIFICATION
SYSTEM
Previously, it was shown that the cylinder signature
is the parameter which most impacts the artworks
printed by a rotogravure process (Tkachenko et al.,
2020). It was also demonstrated that the identification
of the cylinder(s) used can be done using the Pearson
correlation or the NNLS classification. Nevertheless,
according to (Tkachenko et al., 2022), it is not possi-
ble to identify the press used to print an artwork on a
packaging, as well as to identify the support used for
the printing, using these metrics.
The current advances in deep learning techniques
make possible a quick identification of people (us-
ing facial biometrics or handwritten signatures). (Tsai
et al., 2019) showed that printer identification can be
also efficiently performed using deep learning tech-
niques. In this context, we propose to use the simi-
larity metric learning for rotogravure press identifica-
tion.
In the following sections, we introduce first the two
identification scenarios studied, next the Siamese
Neural Network used, and lastly the training setup
used for rotogravure press and support identification.
3.1 Identification Scenarios Studied
To authenticate a medicine packaging, we need to ver-
ify the authenticity of the manufacturing process used
to print it (Schraml et al., 2017; Schraml et al., 2018).
The objective is to check that the cylinder, the press
and the support used to print this packaging come
from an authorized manufacture. The identification
of rotogravure cylinders used to print pharmaceuti-
cal packaging was solved in (Tkachenko et al., 2022).
The next step now is to study the two following iden-
tification problems:
• The identification of the press used: This scenario
happens when we need to identify a rotogravure
press to ensure that some samples were printed by
an authentic printing company.
• The identification of the printing support used:
This scenario allows us to verify the authenticity
of the printing support used for packaging.
In this paper, we want to solve these two identifica-
tion problems using a Siamese Neural Network with
triplet loss.
3.2 Siamese Neural Network Used
Deep learning networks are very powerful for super-
vised learning when a large amount of data is avail-
able. However, in the majority of real-world appli-
cations, it is very difficult and expensive to collect
big data sets. Therefore, weakly-supervised or semi-
supervised learning approaches are very popular to-
day. One of such approaches is the similarity met-
ric learning that learns to differentiate the inputs of
the model instead of classifying them (Duffner et al.,
2021).
When we talk about similarity metric learning, the
commonly used models are based on Siamese Neu-
ral Networks (SNN). SNN were proposed in (Brom-
ley et al., 1993) for solving the task of signature ver-
ification. The SNN consists of twin neural networks
which receive two different inputs, meanwhile these
parallel neural networks share the same parameters.
Each neural network produces embeddings which are
united with the top conjoining distance layer, based
on the distance loss function which represents the
similarity between inputs.
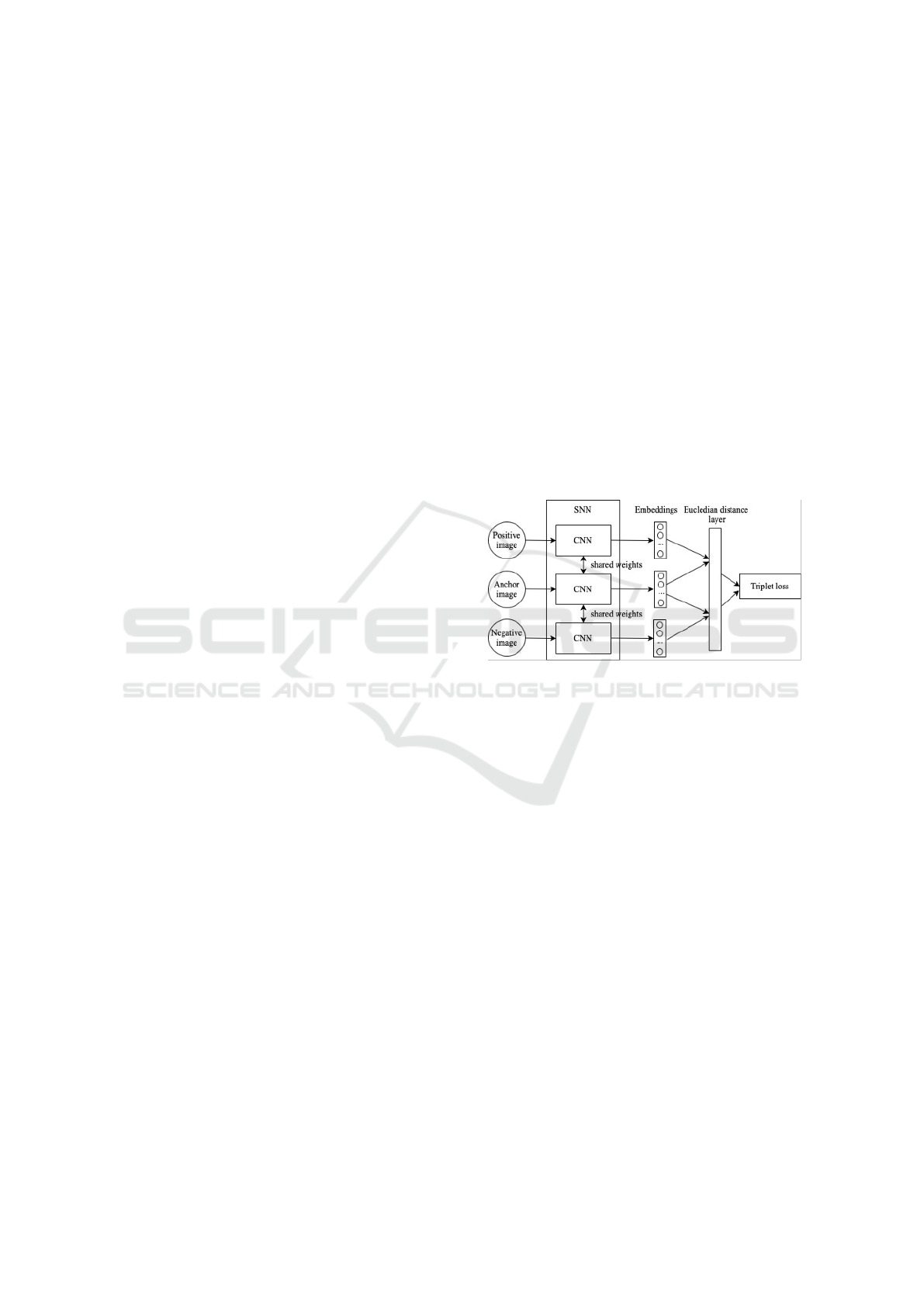
Figure 3: The SNN architecture used.
In this paper, we use the triplet SNN which is com-
posed of three identical sub-networks (see Fig. 3), to
solve the task of press identification. This model uses
three images for the input (A, P, N): an anchor A (tem-
plate image), a positive sample P (image printed with
the same conditions as the template) and a negative
sample N (image printed with different manufacturing
conditions - another press, cylinder or support used).
The model was trained to minimize the distance be-
tween similar images and to maximize the distance
between dissimilar images. For this purpose, we used
a triplet loss function (Weinberger et al., 2005) de-
fined by the following Euclidean distance function :
L(A, P, N) = max(||e(A) − e(P)||
2
− ||e(A) − e(N)||
2
+ α),
(1)
where α is the margin between positive and negative
pairs, and e(x) is the embedding.
For the training the standard stochastic gradient de-
scent was used. The accuracy of the model was cal-
culated as a binary accuracy, based on the similarity
between the anchor and the positive images, in com-
parison with the similarity between the anchor and the
negative images.
Printed Packaging Authentication: Similarity Metric Learning for Rotogravure Manufacture Process Identification
907

3.3 Training Setup Used
Due to the relatively small size of the training data
set, we decided to use a transfer learning approach.
This approach is based on the use of a pre-trained
model. The main objective was to use the trained
layers of a pre-trained model, freezing the weights of
this model, then adding several trainable layers on the
top of frozen layers, and lastly training them. The
new train model can be used for feature extraction.
Fine-tuning was used to improve the efficiency of the
model, it consists in: unfreezing several top layers of
the model, and re-training them with a small learn-
ing rate. For the feature extraction, we used two deep
convolutional networks: VGG16 (Simonyan and Zis-
serman, 2015) and ResNet50 (He et al., 2016), pre-
trained on Imagenet data set (consisting of 1.4M im-
ages and 1000 classes):
• VGG16 model has 13 convolutional layers, five
max pooling layers, and three dense layers. The
specificity of this architecture comes from the use
of very small 3 × 3 convolution filters.
• ResNet50 is a very deep CNN architecture with
50 layers. The specificity of this architecture
comes from the bottleneck design of the building
blocks, which reduces the number of parameters
and matrix multiplications, this enables to speed
the training of each layer.
In our identification process, both models (VGG16
and ResNet50) were only used for feature extraction,
and the last classification layers were removed from
these models.
We added to each pre-trained model: 1) three dense
layers (the first dense layer with 1024 neurons, the
two following layers with 512 neurons); 2) one
dropout layer with a learning rate equals to 0.2; and
3) one batch normalization layer. The output layer
for both models consists of 512 neurons, which repre-
sents the extracted features. These outputs were used
for calculating the distances between the anchor and
positive images, and also between the anchor and neg-
ative images. Then, the model was trained to mini-
mize the triplet loss function (1). After a series of ex-
periments, the value of the margin parameter α was
set to 0.2, meanwhile the learning rate was set to
0.0001. For fine-tuning, the fifth block was unfreezed
in both models.
4 EXPERIMENTAL RESULTS
In this section, we will present the experimental re-
sults. First, we present the augmented data set used in
our experiments, next we discuss the results obtained
for rotogravure and printing support identification.
(a) (b) (c)
(d) (e)
Figure 4: An illustration of: a) the regular test pattern E
used; b-c) two regular test patterns printed on blister, us-
ing a chemical etching engraved cylinder; d-e) two regular
test patterns printed on strip, using an electro-mechanically
engraved cylinder.
4.1 Database Description
In this paper, we worked with a regular test pattern
E (see Fig. 4.a) printed using two presses (P
1
and P
2
)
and two types of engraving cylinders: 1) two cylin-
ders engraved using chemical etching (C
1
and C
2
);
and 2) a cylinder engraved using electro-mechanical
process (M
1
). The samples printed using the cylin-
ders engraved using chemical etching (Fig. 4.b-c) dif-
fer a lot from the samples printed using the electro-
mechanically engraved cylinder (Fig. 4.d-e).
Additionally, we studied the impact of the printing
support used, using the regular test patterns printed
on: 1) thin aluminium foils - called blisters (letter ’b’
in the tables and figures); and 2) thick aluminium foils
- called strips (letter ’s’ in the tables and figures). The
details about the data set used are given in Table 1.
Table 1: Description of the database used (specifically de-
signed for this study) with a regular pattern printed in differ-
ent positions (E
i
, i = 1, . . . , 6) on the cylinder, printed with
different types of engraving processes on different printing
supports.
E
1
E
2
E
3
E
4
E
5
E
6
Chemical etching
P
1
C
2
s 50 50 50 50 50 50
P
2
C
2
s 50 50 50 50 50 50
P
1
C
1
b 50 50 50 50 50 50
P
2
C
1
b 50 50 50 50 50 50
Electro-mechanical engraving
P
1
M
1
s 50 50 50 50 50 50
P
2
M
1
s 49 48 49 48 49 48
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
908
The subsets P
1
C
2
s, P
2
C
2
s, P
1
C
1
b, P
2
C
1
b were al-
ready introduced in (Tkachenko et al., 2022). In this
new study, we enlarged this database by adding the
subsets P
1
M
1
s and P
2
M
1
s for the purpose of the eval-
uation of identification scenarios discussed in Sec-
tion 3.1. All images of the regular test pattern were
captured using an USB-microscope
3
with ×5 magni-
fication. The size of images is 432 × 452 pixels.
This database was divided in combinations of pairs:
P
1
C
2
s − P
2
C
2
s, P
1
C
1
b − P
2
C
1
b and P
1
M
1
s − P
2
M
1
s.
Next, samples corresponding to each pair were split
on training, validation, and test data set in the same
way. We used 50% of images for the training set, 25%
of images for the validation and test sets.
The triplets (anchor, positive, negative) were defined
as follow: we created unique pairs (anchor, positive)
from the first subset (for example, P
1
M
1
s), and we
added a random image from the second subset (in our
example, P
2
M
1
s) to each pair as a negative sample.
We used two approaches for making triplets. For the
first strategy of splitting, we did not consider the regu-
lar test pattern position (E
i
, i = 1, . . . , 6) while prepar-
ing the triplets. For the second strategy, the regular
test pattern position was taken into consideration.
All the involved networks were implemented using
Python 3.6.2 with Keras 2.3.1 and TensorFlow 2.0.0.
The following sections report the results of experi-
ments done for the validation of the proposed iden-
tification approach. We repeated each experiment 10
times with random splitting of the data set on train,
test, and validation sets.
4.2 Identification of the Press Used
We evaluated the press identification task using three
subsets of our database:
• Press identification while cylinders engraved us-
ing chemical etching and samples printed on strip
(subsets P
1
C
2
s and P
2
C
2
s).
• Press identification while cylinders engraved us-
ing chemical etching and samples printed on blis-
ter (subsets P
1
C
1
b and P
2
C
1
b).
• Press identification while cylinders engraved us-
ing electro-mechanical engraving and samples
printed on strip (subsets P
1
M
1
s and P
2
M
1
s).
The first series of experiments, illustrated by the re-
sults shown in Table 2 let us conclude that the use
of ResNet50 network gives better results (in terms of
accuracy) than VGG16 network. We can note that af-
ter fine-tuning, the ResNet50 model gives a little bit
worse result in comparison with the model without
3
Bodelin Proscope Microscope
fine-tuning, but if we consider the engraved position
the results after fine-tuning are better.
Therefore, for all further experiments, we used only
fine-tuned ResNet50 model trained with 20 epochs as
the value of loss function in most cases did not change
significantly after 15 epochs. To illustrate this, we
plotted in Fig. 5 the training and validation accuracy
curves for one of the experiments done.
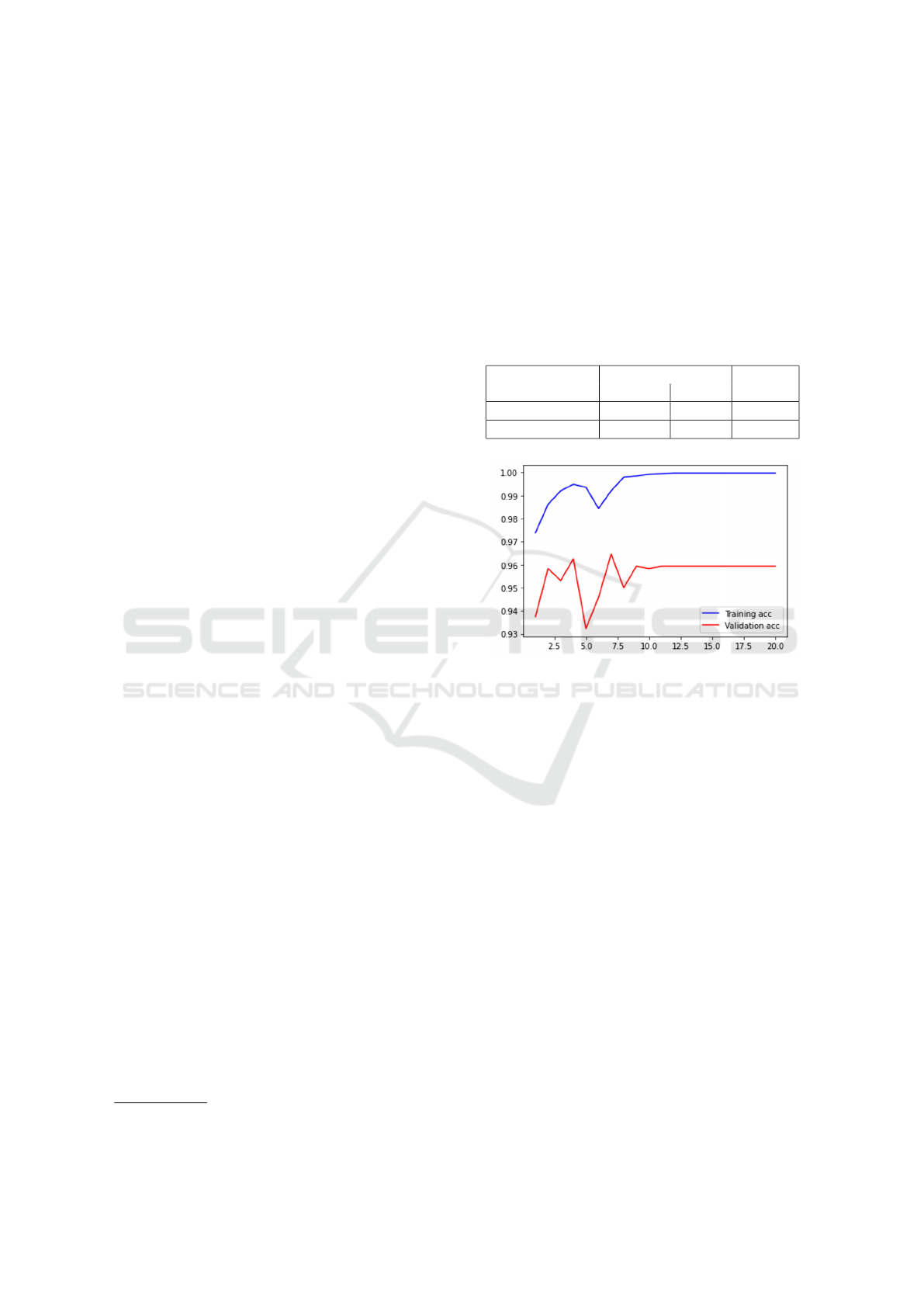
Table 2: Example of comparison of identification accuracy
of images from subsets P
1
M
1
s and P
2
M
1
s, while using two
training models, with and without fine tuning.
ResNet50 VGG16
w/o pos. w/pos.
w/o fine-tuning 0.9853 0.9699 0.9398
w/ fine-tuning 0.9819 0.9875 0.9486
Figure 5: Training and validation accuracy curves for 20
training epochs.
Table 3 shows the obtained accuracy results of press
identification. These results demonstrate that the sim-
ilarity metric learning using ResNet50 for feature ex-
traction based on the triplet loss can efficiently iden-
tify the rotogravure press used for packaging printing.
It was shown that the printing position also impacts
the printed image quality (Tkachenko et al., 2022).
Therefore, we tested both strategies 1) without con-
sidering engraved position, and 2) considering en-
graved position. For the first strategy when we formed
triplets for the ”anchor-positive” pairs we did not con-
sider engraved position, but for the second strategy
we formed ”anchor-positive” pairs only from the ele-
ments in one engraved position. Therefore, the train-
ing datasets are different in these two experiments.
The accuracy results in Table 3 prove that the consid-
eration of engraved position can improve the identi-
fication accuracy (see Table 3 column 3). The worst
results (identification accuracy equals to 0.88) are ob-
tained for subsets P
1
C
2
s and P
2
C
2
s. One possible ex-
planation is the big variability of training samples due
to the complex standardization of chemical etching
(Kipphan, 2001) and the higher complexity of print-
Printed Packaging Authentication: Similarity Metric Learning for Rotogravure Manufacture Process Identification
909
ing support (strip aluminium foil has more surface im-
perfection than blister aluminium foil).
Table 3: Press identification using ResNet50 with fine-
tuning, while not considering or considering the position
of regular test pattern on the cylinder.
Subsets used w/o position w/ position
P
1
C
2
s vs P
2
C
2
s 0.8288 0.8822
P
1
C
1
b vs P
2
C
1
b 0.9576 0.9610
P
1
M
1
s vs P
2
M
1
s 0.9819 0.9875
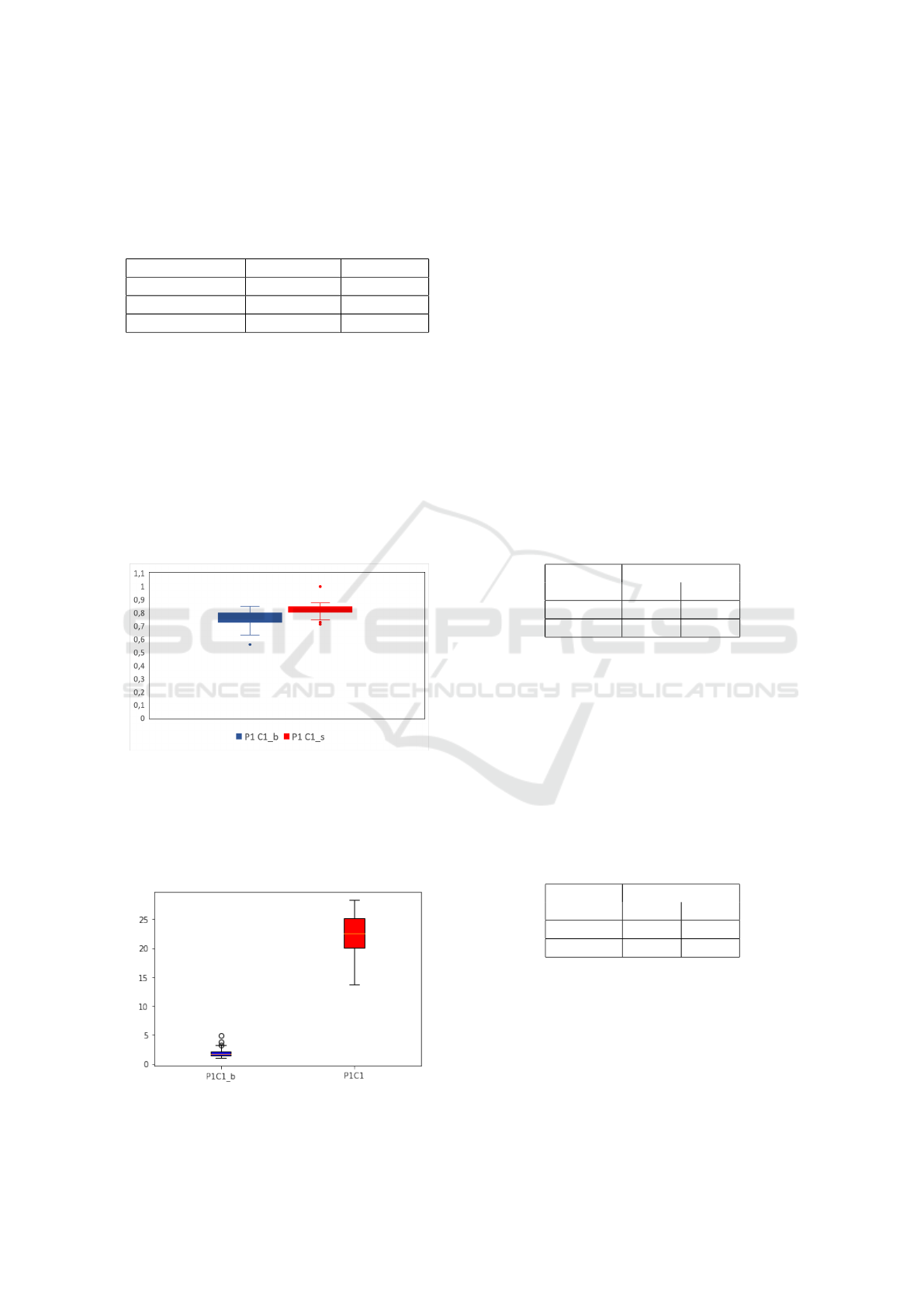
4.3 Identification of the Printing
Support Used
In this experiment, we studied the impact of printing
support for press identification. We used the subsets
of images P
1
C
1
s and P
1
C
1
b, from (Tkachenko et al.,
2022). While using the Pearson correlation, we can-
not spot the differences between the images printed
on blister and on strip. The results of this experiment
are illustrated in Fig. 6.
Figure 6: Press identification accuracy of samples printed
on blister and on strip aluminum foils.
On the other hand, the proposed similarity metric
learning model can successfully separate the sam-
ples that come from these subsets, as demonstrated
in Fig. 7.
Figure 7: Press identification accuracy of samples printed
on blister and on strip aluminum foils.
The results presented in previous sections illustrate
the possibility to use SNN with triplet loss for the ro-
togravure manufacturing process identification.
5 DISCUSSION ABOUT
PACKAGING
AUTHENTICATION
Based on these results, we can conclude that it is
possible to construct an authentication system using
the proposed similarity metric learning approach. For
this, we can empirically define a so called authentica-
tion threshold th (the maximal distance between the
authentic templates used during training and valida-
tion samples). Then, we can use this threshold for au-
thentication of test samples: if the minimal distance
between a test sample and a template is smaller than
th, then the test sample is considered as authentic.
Table 4: Confusion matrix of samples authentication com-
puted from data sets P
1
C
1
b and P
2
C
1
b.
Actual
Predicted P
1
C
1
b P
2
C
1
b
P
1
C
1
b 90.7% 9.3%
P
2
C
1
b 9.3% 90.7%
We fixed experimentally the authentication threshold
to th using the validation data set, and then classify
the test images to authentic and fake classes. The
confusion matrix, corresponding to some of the data
sets studied, is presented in Tables 4- 6. From results
shown in Tables 4- 5, we can conclude that it is pos-
sible to use the proposed similarity metric learning
approach to efficiently authenticate the samples that
were printed using the same engraved cylinder and
two rotogravure presses.
Table 5: Confusion matrix of samples authentication com-
puted from data sets P
1
M
1
s and P
2
M
1
s.
Actual
Predicted P
1
M
1
s P
2
M
1
s
P
1
M
1
s 98.5% 3%
P
2
M
1
s 1.5% 97%
The last experiment represents the situation, when
falsified packaging follow the same manufacturing
chain, but are printed on another printing support. Ta-
ble 6 demonstrates that the proposed similarity met-
ric learning approach can identify the printing support
that was used for printing.
These results show the potential of the similarity met-
ric learning for forensics and packaging authentica-
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
910

Table 6: Confusion matrix of sample authentication com-
puted from data sets P
1
C
1
b and P
1
C
1
s.
Actual
Predicted P
1
C
1
b P
1
C
1
s
P
1
C
1
b 98.7% 2.7%
P
1
C
1
s 1.3% 97.3%
tion applications. Additionally, the use of relatively
small data sets for training stage, motivates us to con-
tinue to study this approach for real-world authentica-
tion applications.
6 CONCLUSIONS
Medicine falsification is a big issue nowadays. We
need to find simple and relatively cheap protection
solutions. One of such solutions is the use of foren-
sics approaches. To print pharmaceutical packag-
ing printing manufactures use the rotogravure print-
ing technique that has some specific characteristics.
Previously, it was shown that the signature of the ro-
togravure cylinder can be easily identified using Pear-
son correlation. Nevertheless, the identification of the
rotogravure press and of the printing support were
shown to be a difficult problem. In this paper, we
investigated the use of the similarity metric learning
approach for these two identification scenarios.
Our experimental results prove the possibility to
easily identify both the printing support used and the
rotogravure press used for packaging pharmaceuti-
cal samples, using the similarity metric learning ap-
proach.
The next step will be to construct a full authen-
tication system using the proposed similarity metric
learning approach, and explore the possibility to use
a smartphone camera for authentication.
ACKNOWLEDGEMENTS
We would like to thanks the PAUSE Program: Emer-
gency Assistance to Ukrainian Researchers to support
the scientific stay of T. Yemelianenko in LIRIS lab-
oratory. This work was done in the context of the
FakeNets project funded by F
´
ed
´
eration Informatique
de Lyon. All the printed samples were provided by
Sergusa Solutions Pvt Ltd in the context of PackMark
project (IFCPAR-7127) supported by the Indo-French
Center for the Promotion of Advanced Research.
REFERENCES
Bromley, J., Guyon, I., LeCun, Y., S
¨
ackinger, E., and Shah,
R. (1993). Signature verification using a” siamese”
time delay neural network. Advances in neural infor-
mation processing systems, 6.
Davison, M. (2011). Pharmaceutical anti-counterfeiting:
combating the real danger from fake drugs. John Wi-
ley & Sons.
Duffner, S., Garcia, C., Idrissi, K., and Baskurt, A. (2021).
Similarity metric learning. In Multi-faceted Deep
Learning, pages 103–125. Springer.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep
residual learning for image recognition. In IEEE Con-
ference on Computer Vision and Pattern Recognition,
CVPR 2016, Las Vegas, NV, USA, June 27-30, 2016,
pages 770–778. IEEE Computer Society.
Joshi, S., Saxena, S., and Khanna, N. (2020). Source printer
identification from document images acquired using
smartphone. arXiv preprint arXiv:2003.12602.
Kipphan, H. (2001). Handbook of print media: technolo-
gies and production methods. Springer Science &
Business Media.
Nguyen, Q.-T., Mai, A., Chagas, L., and Reverdy-Bruas, N.
(2021). Microscopic printing analysis and application
for classification of source printer. Computers & Se-
curity, 108:102320.
Schraml, R., Debiasi, L., Kauba, C., and Uhl, A. (2017). On
the feasibility of classification-based product package
authentication. In Information Forensics and Security
(WIFS), 2017 IEEE Workshop on, pages 1–6. IEEE.
Schraml, R., Debiasi, L., and Uhl, A. (2018). Real or
fake: Mobile device drug packaging authentication.
In Proceedings of the 6th ACM Workshop on Informa-
tion Hiding and Multimedia Security, pages 121–126.
ACM.
Simonyan, K. and Zisserman, A. (2015). Very deep convo-
lutional networks for large-scale image recognition. In
3rd International Conference on Learning Represen-
tations, ICLR 2015, San Diego, CA, USA, May 7-9,
2015, Conference Track Proceedings.
Tkachenko, I., Tr
´
emeau, A., and Fournel, T. (2019). Au-
thentication of medicine blister foils: Characterization
of the rotogravure printing process. In VISIGRAPP (4:
VISAPP), pages 577–583.
Tkachenko, I., Tr
´
emeau, A., and Fournel, T. (2020). Fight-
ing against medicine packaging counterfeits: ro-
togravure press vs cylinder signatures. In 2020 IEEE
International Workshop on Information Forensics and
Security (WIFS), pages 1–6. IEEE.
Tkachenko, I., Tr
´
emeau, A., and Fournel, T. (2022). Au-
thentication of rotogravure print-outs using a regular
test pattern. Journal of Information Security and Ap-
plications, 66:103133.
Tsai, M.-J., Tao, Y.-H., and Yuadi, I. (2019). Deep learn-
ing for printed document source identification. Signal
Processing: Image Communication, 70:184–198.
Weinberger, K. Q., Blitzer, J., and Saul, L. (2005). Distance
metric learning for large margin nearest neighbor clas-
sification. Advances in neural information processing
systems, 18.
Printed Packaging Authentication: Similarity Metric Learning for Rotogravure Manufacture Process Identification
911
