
The Effect of Covariate Shift and Network Training on
Out-of-Distribution Detection
Simon Mariani
1
, Sander R. Klomp
2 a
, Rob Romijnders
1
and Peter H. N. de With
2 b
1
University of Amsterdam, Amsterdam, The Netherlands
2
Eindhoven University of Technology, Eindhoven, The Netherlands
Keywords:
Out-of-Distribution Detection, Deep Learning, Convolutional Neural Networks.
Abstract:
The field of Out-of-Distribution (OOD) detection aims to separate OOD data from in-distribution (ID) data in
order to make safe predictions. With the increasing application of Convolutional Neural Networks (CNNs) in
sensitive environments such as autonomous driving and security, this field is bound to become indispensable
in the future. Although the OOD detection field has made some progress in recent years, a fundamental
understanding of the underlying phenomena enabling the separation of datasets remains lacking. We find that
the OOD detection relies heavily on the covariate shift of the data and not so much on the semantic shift, i.e.
a CNN does not carry explicit semantic information and relies solely on differences in features. Although
these features can be affected by the underlying semantics, this relation does not seem strong enough to rely
on. Conversely, we found that since the CNN training setup determines what features are learned, that it is
an important factor for the OOD performance. We found that variations in the model training can lead to an
increase or decrease in the OOD detection performance. Through this insight, we obtain an increase in OOD
detection performance on the common OOD detection benchmarks by changing the training procedure and
using the simple Maximum Softmax Probability (MSP) model introduced by (Hendrycks and Gimpel, 2016).
We hope to inspire others to look more closely into the fundamental principles underlying the separation of
two datasets. The code for reproducing our results can be found at https://github.com/SimonMariani/OOD-
detection.
1 INTRODUCTION
Although Convolutional Neural Networks (CNNs)
achieve good performance on many different tasks,
their deployment in sensitive environments does not
come without problems. In order to use CNNs safely
in tasks for self driving cars (Vojir et al., 2021; Boone
et al., 2022), medical image analysis (Mehrtash et al.,
2020; Raghu et al., 2019) or face recognition (Chang
et al., 2020; Betta et al., 2011), some degree of cer-
tainty must be given to the predictions of such a net-
work, as a misclassification can be problematic. This
is often referred to as misclassification detection and
is generally done on samples that can be seen as
drawn from the same distribution as the training data,
i.e. the In-Distribution (ID). Besides such samples
that are drawn from the ID, it can also be the case
that a sample was drawn from a different distribu-
tion. Such a sample can then be referred to as an Out-
of-Distribution (OOD) sample and is likely to affect
a
https://orcid.org/0000-0002-0874-4720
b
https://orcid.org/0000-0002-7639-7716
the output of the CNN. Therefore, the field of OOD
detection is concerned with separating OOD sam-
ples from ID samples, as to increase the reliability of
CNNs. Although access to OOD data is generally not
available, some ID-OOD dataset pairs have emerged
and are being extensively used as the general bench-
mark (Hendrycks and Gimpel, 2016; Lee et al., 2018;
Lee et al., 2017). Succeeding work has been con-
cerned with the scalability of OOD detection methods
and propose larger benchmark datasets (Hendrycks
et al., 2019a; Huang and Li, 2021; Roady et al., 2019).
These benchmarks are currently the primary way of
comparing OOD detection methods and are vital for
the development of new OOD detection methods.
For this reason, we will also use the existing
benchmarks to measure performance and show that
detecting OOD samples relies heavily on the covari-
ate shift of the data and largely ignores actual class
differences. We do so by looking at the OOD samples
that share and do not share classes with the ID data, as
some of the commonly used benchmark dataset pairs
have some class overlap. For this purpose, we use
Mariani, S., Klomp, S., Romijnders, R. and N. de With, P.
The Effect of Covariate Shift and Network Training on Out-of-Distribution Detection.
DOI: 10.5220/0011725900003417
In Proceedings of the 18th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2023) - Volume 5: VISAPP, pages
723-730
ISBN: 978-989-758-634-7; ISSN: 2184-4321
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
723

the ID labels for OOD samples provided by (Yang
et al., 2021b), who proposed the Semantically Coher-
ent OOD detection framework where the OOD sam-
ples that share a class with the ID data are treated
as if they were from the ID data. We merely use
their class labels to link OOD detection to the covari-
ate and semantic shift encompassed by the General-
ized OOD Detection framework (Yang et al., 2021a),
which makes a clear distinction between a shift in the
feature space of the data (covariate), versus a shift in
the class space of the data (semantic).
Consequently, as the CNN training forms the fea-
ture space, it can thus improve or worsen the OOD
detection performance. We argue that the effect of the
model training on the OOD detection performance is
important to highlight. For this reason, we investi-
gate several training approaches and their relation to
the OOD detection performance on several ID-OOD
dataset pairs. We show that the CNN training has a
non-negligible impact on the OOD performance and
should be taken into account as it can drastically di-
minish performance. We also show that the model
training can be used to improve not only the classi-
fication accuracy, but also the OOD detection perfor-
mance without the use of additional OOD data.
In summary, we list our contributions as follows:
• We show that OOD detection methods rely on the
covariate shift of the data and mainly neglect the
semantic shift. We do so by looking at the rela-
tion between the OOD performance for separat-
ing OOD samples that do and do not share a class
with the ID data. Additionally, we explain the the-
oretical implications of this result.
• We show that by focusing on the covariate shift
during training, the OOD detection performance
can be improved even when using the simple MSP
model (Hendrycks and Gimpel, 2016). We also
show that model training can harm the OOD de-
tection performance and explain why.
2 RELATED WORK
Output Based Methods. The most fundamental
group of OOD detection approaches uses the final
model output or an enhanced version of the model
output as OOD score. One of the first and most widely
used baseline methods uses the unmodified Maximum
Softmax Probability (MSP) as OOD score (Hendrycks
and Gimpel, 2016). Following this work, the True
Class Probability (Corbi
`
ere et al., 2019) and Max
Logit (Hendrycks et al., 2019b) provide alternative
output values to use as OOD scores.
Another well known approach is called
ODIN (Liang et al., 2017) and enhances the
model output by applying image perturbations to
the input image and applying temperature scaling to
the output. The output layer can also be modified
by adding a rectified activation (ReAct) after the
penultimate layer of the model (Sun et al., 2021) or
the entire model can be cast as an energy based model
(EBM) by only changing the output layer (Liu et al.,
2020).
Feature Space Methods. An different group of
OOD detection methods uses the induced feature
space of a CNN to formulate OOD scores. The fea-
tures in the feature space can be modelled with a Mul-
tivariate Gaussian distribution, for which then the Ma-
halanobis distance can be used to obtain the distance
of a sample to the different class distributions. Be-
cause the feature distribution does not necessarily fol-
low a Gaussian distribution, (Zisselman and Tamar,
2020) propose to use a residual flow model to map the
feature space to a Gaussian distribution rather than us-
ing the Feature space directly. The feature representa-
tions can also be enhanced by calculating higher order
gram matrix of the feature representations and calcu-
lating the deviation from the min-max range (Sastry
and Oore, 2020).
Similarly, the feature space can be enhanced by
changing the model in order to obtain more distinct
and better separable representations. One such way
uses contrastive training (Winkens et al., 2020) by
adding an additional head to the model and feeding
it different augmentations of the original images in
order to map different representations of the same im-
age closer together. Alternatively, the representations
of pretrained transformer models already provide a
more discriminative representations and can also be
used for OOD detection (Fort et al., 2021).
3 METHODOLOGY
This section explains the two OOD detection methods
that we use in our study, as well as the training vari-
ations that we use to compare the effect of the model
training on the OOD detection performance.
Maximum Softmax Probability. One of the first
and simplest OOD detection methods for CNN was
proposed by (Hendrycks and Gimpel, 2016) and uses
the maximum softmax probability as OOD score. The
idea is that if the probability of the predicted class is
high, that the model is certain and the sample is likely
to be of the same distribution as the training data, i.e.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
724
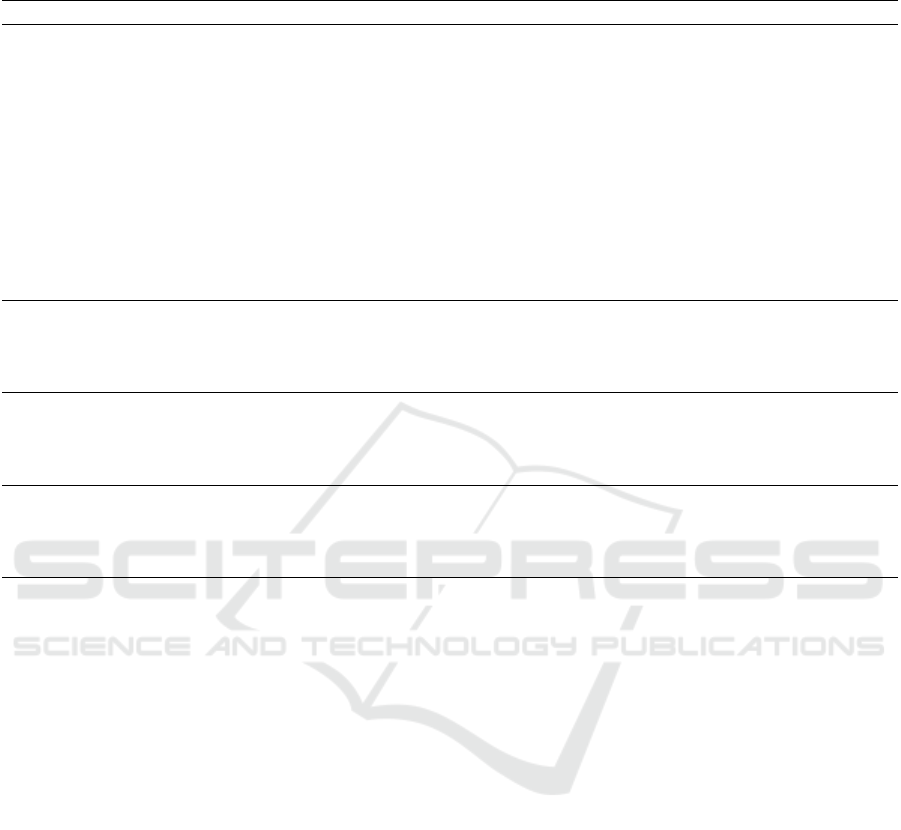
Table 1: All the training variations including a short explanation. The training variations can be categorized in data augmen-
tations, optimizer, loss and other variations.
Training variation Explanation
Data Augmentations
MixUp MixUp (Zhang et al., 2018) uses linear interpolations of images to learn linear
interpolations of labels.
Blur Adding Gaussian blur to images makes the images smoother, thus more uniform.
Equalize The equalize operation equalizes the intensity histogram of an image, creating
more uniformly distributed data.
Colorjitter This data augmentation randomly changes the brightness, saturation and hue.
Erase The random erasing data transform (Zhong et al., 2020) randomly chooses a rect-
angular region and randomizes its pixel values.
Perspective The perspective data transform randomly changes the perspective of the image,
making it seem like the image is viewed from a different angle.
Augment policy Instead of manually searching for data augmentation policies, (Cubuk et al., 2019)
propose to automatically search for the best data augmentation policy.
Optimizer
Momentum We change the default Stochastic Gradient Descent momentum with Nesterov mo-
mentum (Nesterov, 1983).
Scheduler We vary the cosine annealing learning rate scheduler with the multi step learning
rate scheduler, which multiplies the learning rate by a factor γ at pre-set intervals.
Loss
Weight decay As a training variation, we remove weight decay from our default setup, thereby
implicitly allowing large weights in the model.
Gradient penalty Gradient penalties (Drucker and Cun, 1992) ensure smaller gradients and therefore
make the training more sensitive.
Other
Pretrained model The authors of the Mahalanobis distance paper (Lee et al., 2018) have open
sourced a RESNET34 model. Since this model has since been re-used in other
works (Sastry and Oore, 2020; Zisselman and Tamar, 2020), we also include it as
a training variation for the sake of completeness.
it is ID. Vice versa, when the output probability of the
predicted class is low, the sample is likely to be of
some other distribution i.e it is OOD. This approach
is often used as a baseline method as it is easy to im-
plement and obtains reasonable OOD detection per-
formance.
Mahalanobis Distance. The second method that
we use to investigate the OOD benchmarks, uses the
intermediate features of a CNN to obtain a Gaussian
distribution and uses the Mahalanobis distance as the
OOD score (Lee et al., 2018). The class mean µ
c
and
tied covariance σ can be calculated from the train-
ing data by representing every image as a vector in
this feature space. The distance from any sample to a
class distribution can then be determined with the Ma-
halanobis distance, which is defined as the probabil-
ity density function of the unnormalized multivariate
Gaussian distribution.
The authors of the original Mahalanobis distance
based approach (Lee et al., 2018) also introduce a per-
turbation hyperparameter which is said to make the
ID and OOD data more separable. Because setting
the hyperparameters for the perturbation strength re-
quires the use of validation OOD data, we have cho-
sen to omit this parameter altogether. Furthermore, in
order to obtain the best average over the layers, the
authors also train a regression model using validation
samples in order to find the best layer weights. As this
also requires OOD validation data, we have chosen to
omit this as well and use a regular average over the
layers of the Mahalanobis distances.
Training Variations. For our standard model
training we use the training parameters provided
by (Kuangliu, 2021) and change one parameter at a
time in order to isolate the effect of the parameter
choice. All changed parameters are shown in Table 1.
4 EXPERIMENTS
4.1 Experimental Setup
This section describes the employed ID and OOD
datasets, as well as the CNNs and OOD detection
metrics.
Datasets. As training/ID dataset we use CIFAR10,
CIFAR100 and SVHN. As OOD datasets we use
CIFAR10, SVHN, Tiny ImageNet, LSUN, Places,
The Effect of Covariate Shift and Network Training on Out-of-Distribution Detection
725
(a) Default PyTorch bilinear resize. (b) Pytorch bicubic resize.
(c) Pytorch nearest resize. (d) Open sourced resized data by ODIN (Liang et al., 2017).
Figure 1: Resized samples of the Tiny ImageNet dataset for different resizing methods. Different resizes produce different
images as noise can be introduced which can affect the OOD detection performance.
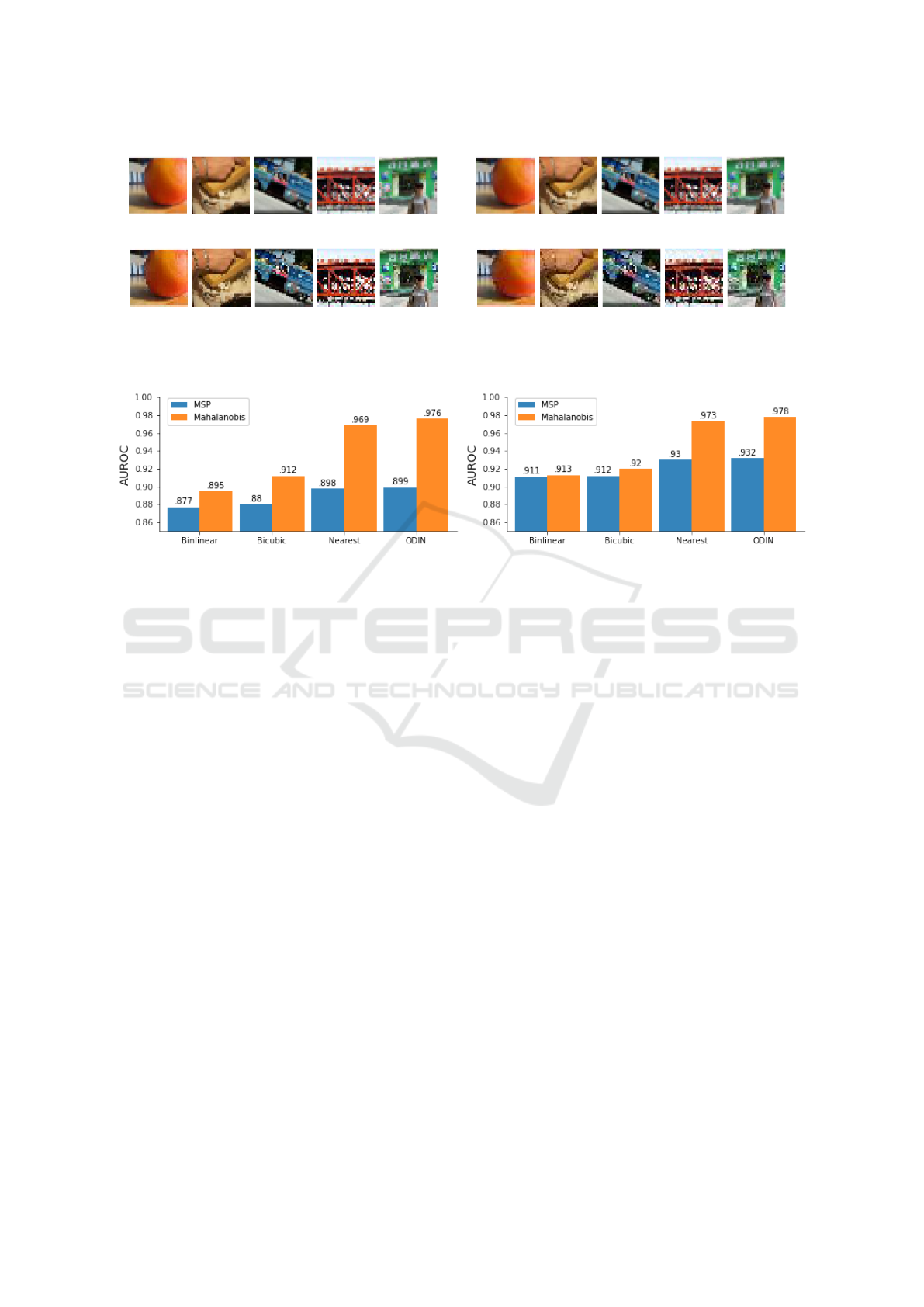
(a) Tiny ImageNet resizes. (b) LSUN resizes.
Figure 2: The AUROC scores for separating tiny ImageNet (2a) and LSUN (2b) with different resizes for both the baseline
model as well as the Mahalanobis distance based model. Different resizes lead to large differences in scores, indicating the
importance of the resize method and therefore the feature space.
CIFAR100 and Textures. This follows the stan-
dard OOD data setup followed by many such
as (Hendrycks and Gimpel, 2016; Lee et al., 2018;
Lee et al., 2017), but also the higher dimen-
sional OOD datasets used by (Huang and Li, 2021;
Hendrycks et al., 2019a; Roady et al., 2019). For a
correct OOD detection setting, we always use the ex-
act same test transform for the OOD data as for the
ID data. The resizing operation used for every OOD
dataset is the PyTorch default bilinear resizing opera-
tion.
Models. We first train the RESNET34 model (He
et al., 2015) on the CIFAR10, CIFAR100 and SVHN
datasets from scratch, by using the training param-
eters provided by (Kuangliu, 2021) and obtain the
same performance. We then vary the training as de-
scribed in Section 3 and use the resulting model for
the MSP and Mahalanobis methods. The models are
then indicated as {model}-{variety} s.t. {model} ei-
ther indicates the MSP or Mahalanobis model, and
{variety} one of the training variations.
Metrics. The OOD detection on an ID-OOD dataset
pair can be viewed as a binary classification problem,
where samples from the ID are labeled as positive
samples and samples from the OOD data as negative
samples. We then look at the Area Under the Re-
ceiver Operator Curve (AUROC), the Detection Ac-
curacy (Detection Acc.) and the True Negative Rate
at 95% True Positive Rate (TNR at TPR 95). These
are the generally included metrics for OOD detection.
Finally, in order to look at the relation between perfor-
mances, the Pearson correlation coefficient is used.
4.2 Impact of Covariate Shift
This section describes two experiments that show how
the data is generally separated with an emphasis on
the covariate shift of the ID-OOD dataset pairs.
Resizing and Noise. For the preparation of ID-
OOD dataset pairs images might need to be resized.
For example, the images from CIFAR10 have a size of
32 × 32 while the images from Tiny ImageNet have a
size of 64×64 pixels. This means that in order to use
Tiny ImageNet as the OOD dataset, the images will
have to be resized to match the CIFAR10 data. Al-
though not a lot of attention has been brought to this
matter, from Figure 1 we can see that different resizes
produce different images. Especially in Figure 1c,
the resizing introduces a lot of noise into the images.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
726

These images are very similar to the samples shown
in Figure 1d which come from the already resized
dataset that was open sourced by the authors of the
paper that introduced ODIN (Liang et al., 2017). Al-
though many have since used this data, to our knowl-
edge there has been no mention of the noise that is
present in the images and its effects.
In Figure 2, the Area Under the Receiver Oper-
ator Curve (AUROC) is plotted for the MSP model
and the Mahalanobis model for separating different
resizes of Tiny ImageNet and LSUN from CIFAR10.
The model has been trained using the default setup
explained in Section 3. We can see that especially
the Mahalanobis model performs a lot better depend-
ing on the resizing operation that is used, indicating
that it is detecting the noise in the images of the data
and using it to separate the OOD data from the ID
data. This makes sense, as the Mahalanobis distance
is the distance calculated in the feature space where
the noise in the images has a large impact. On the
other hand, the performance of the MSP model does
not increase as drastically for different resizing meth-
ods. This is likely because the class of the noisy im-
ages is still prominent despite the noise and that the
goal of the output layer is to find that class, therefore
mainly ignoring the noise. To conclude, noise in the
OOD images can lead to an artificial increase in OOD
performance, especially for methods that utilize the
feature space. Since noise can be introduced because
of the resizing method, the resizing method must be
chosen carefully.
Covariate and Semantic Data Shift. Some sam-
ples from the OOD datasets can share classes with
the ID data. This can pose issues, as there is still
some controversy around if semantically similar sam-
ples should be viewed as OOD for the sake of gen-
eralization (Yang et al., 2021a; Yang et al., 2021b;
Huang and Li, 2021). For this reason, it is important
to investigate the relation between OOD performance
on samples that share a class and samples that do not
share a class with the ID data. This allows us to deter-
mine how the model separates the OOD from the ID
data and if it relies on semantics or not. More specif-
ically, we want to know if OOD detection methods
can actually make a distinction between the semantic
and covariate shift between the ID and OOD data. We
do so, by looking at the relation between the separa-
tion of semantically similar and semantically dissim-
ilar samples from the ID dataset.
Figure 3 shows the AUROC for separating sam-
ples that do not share a class (disjoint), against the
AUROC for separating samples that do share a class
(joint) with the CIFAR10 dataset. In this figure, a
Figure 3: The AUROC for separating OOD samples that
share a class, against the AUROC for separating OOD sam-
ples that do not share a class with the CIFAR10 dataset.
The Tiny ImageNet and Places datasets are used as OOD
dataset. A fairly strong correlation between the two is visi-
ble.
fairly strong correlation between the two is shown.
This correlation indicates that if a model becomes bet-
ter at separating samples that share a class, it also be-
come better at separating samples that do not share a
class and vice versa.
Because samples with semantically dissimilar
classes can only be separated based on non-semantic
features, an increase in OOD performance can only
be explained by an increase in more discriminative
non-semantic features. Because there is a correla-
tion between the OOD performance for separating the
samples with disjoint classes and separating the sam-
ples with joint classes, it must be the case that the
samples with joint classes are also being separated
based on these non-semantic features. This means
that the methods at hand mostly separate the sam-
ples based on their covariate shift and not on their se-
mantic shift. However, it can be argued that semantic
features do not exist and that the semantic properties
of a model/image merely emerge from a set of non-
semantic features. Nevertheless, this would mean the
same thing, since the model would still be unable to
make a distinction between class dependent and in-
dependent features. From this, we can conclude that
the OOD detection depends on the covariate shift be-
tween the ID and OOD datasets.
However, as long as there are semantic differ-
ences, there must also be covariate differences. This
follows from the fact that a difference in class must
also lead to difference in images. If these differ-
ences are not captured by the model, it can be viewed
as a shortcoming of the model. Theoretically, as
The Effect of Covariate Shift and Network Training on Out-of-Distribution Detection
727

long as the feature space is descriptive and high-
level enough, separating any two semantically non-
overlapping datasets should be possible. The same
can however not be said for semantically overlapping
datasets, since semantically similar samples are not
bound to have different features given a more descrip-
tive feature space. This is only true if the features are
also on a high-enough level. For example, when two
sets of semantically non-overlapping images contain
the same low-level features, it becomes impossible to
separate them based on the low-level feature space.
4.3 CNN Training and OOD Detection
As the separation of ID and OOD data strongly de-
pends on the image features, looking at the effect of
the model training is important, because the model
training determines what features are learned. This
section provides insight about the effect of the train-
ing setup on the OOD detection performance.
CNN Accuracy and OOD Detection. When a
CNN is trained, the network learns different features
that aid to the minimization of the learning objec-
tive (Ilyas et al., 2019), and as we have shown in the
previous sections, the discriminativeness of the fea-
ture space is crucial for OOD detection. Therefore, by
training a model to have a more discriminative or less
discriminative feature space, the OOD detection per-
formance can be improved or diminished respectively.
This is in line with many other methods that use some
form of OOD data during training in order to obtain
more distinguishable features (Hendrycks et al., 2018;
DeVries and Taylor, 2018; Lee et al., 2017).
In order to investigate the effect of different train-
ing approaches on the OOD detection performance,
we trained several models on CIFAR10 with a single
difference in the setup in order to isolate its effect.
In Figure 4, we plotted the classification accuracy of
the trained model, against the average AUROC and
average TNR at 95% TPR of the OOD performance
across all datasets for all of the training variations.
This figure shows a fairly strong correlation between
the classification accuracy and the OOD performance,
although not very consistent.
For example, even though MixUp improves the
model accuracy, it reduces the OOD performance
with the MSP model compared to the basic MSP
model. Similarly, we see that when not using weight
decay or when using a multi step scheduler, that the
OOD performance is low compared to other training
variations with a similar accuracy. This shows that
although there is some correlation between the accu-
racy and OOD performance, that the individual train-
Figure 4: The accuracy against the average AUROC and
the average TNR at 95% TPR for all training variations. A
fairly strong correlation between the OOD performance and
the Accuracy is visible, but not very consistent.
ing methods have a bigger latent impact on the OOD
detection performance and are not necessarily related
to the accuracy of the model.
Benchmarking. By changing the training setup, the
classification accuracy as well as the OOD detection
performance can be improved. Table 2 shows that
by changing the training approach, the OOD detec-
tion performance can be increased relative to the same
model with a different training setup. This table also
shows that when using the erase method, the perfor-
mance increases quite steadily with the exception of
the CIFAR100 dataset as ID dataset. Because ran-
dom patches are being set to random values, thereby
obscuring the images during training, the model is
forced to learn different and less typical features in
order to minimize the loss. Because these features are
more typical of the ID data and thus more distinguish-
able from the OOD data, they aid the OOD detection
performance.
When using the SVHN and Textures datasets as
OOD, the Mahalanobis method with erase consis-
tently performs the best. Conversely, when using the
SVHN dataset as the ID dataset, the Mahalanobis
method with erase performs the best for all OOD
datasets. This shows that the features learned by us-
ing the erase data augmentation are generally more
discriminative than without the erase data augmenta-
tion.
Although for the CIFAR10 and SVHN datasets
the erase method performs the best, both with the
MSP or the Mahalanobis model, the CIFAR100
dataset deviates from this trend. From the table it
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
728

Table 2: The OOD detection results for the commonly used ID-OOD dataset pairs and several metrics. The MSP and
Mahalanobis distance on the default setup as well as the MSP and Mahalanobis distance with the erase data augmentation
setup variations are shown. The highest scores are printed in bold.
MSP / Mahalanobis / MSP + erase / Mahalanobis + erase
ID OOD AUROC Detection acc. TNR at TPR 95%
CIFAR10 SVHN .947 / .966 / .971 / .987 .920 / .941 / .950 / .958 .662 / .786 / .830 / .938
TinyImageNet .877 / .895 / .897 / .891 .827 / .829 / .845 / .824 .461 / .498 / .533 / .456
LSUN .911 / .913 / .930 / .911 .857 / .850 / .878 / .848 .511 / .514 / .595 / .475
Places .893 / .899 / .912 / .899 .872 / .878 / .889 / .884 .494 / .500 / .563 / .470
CIFAR100 .881 / .896 / .905 / .895 .827 / .830 / .852 / .826 .446 / .492 / .525 / .457
Textures .914 / .968 / .928 / .983 .855 / .905 / .873 / .933 .544 / .799 / .594 / .903
CIFAR100 SVHN .723 / .840 / .785 / .894 .777 / .817 / .811 / .869 .142 / .363 / .197 / .412
TinyImageNet .801 / .806 / .790 / .737 .737 / .745 / .728 / .687 .246 / .236 / .227 / .119
LSUN .749 / .726 / .748 / .645 .700 / .685 / .697 / .624 .152 / .122 / .141 / .054
Places .775 / .766 / .773 / .699 .818 / .805 / .826 / .802 .207 / .201 / .195 / .094
CIFAR10 .783 / .753 / .775 / .628 .719 / .708 / .713 / .612 .216 / .157 / .197 / .042
Textures .787 / .931 / .805 / .951 .718 / .852 / .727 / .882 .204 / .658 / .248 / .745
SVHN CIFAR10 .913 / .983 / .930 / .994 .893 / .942 / .891 / .967 .715 / .922 / .721 / .982
TinyImageNet .915 / .984 / .923 / .995 .895 / .944 / .889 / .970 .725 / .927 / .714 / .983
LSUN .899 / .981 / .906 / .994 .885 / .939 / .879 / .968 .680 / .906 / .674 / .985
Places .909 / .984 / .920 / .995 .869 / .950 / .867 / .973 .704 / .921 / .703 / .988
CIFAR100 .913 / .983 / .923 / .993 .892 / .941 / .888 / .965 .713 / .917 / .711 / .980
Textures .893 / .991 / .890 / .997 .904 / .963 / .898 / .980 .684 / .963 / .651 / .991
is evident that with the exception of the SVHN and
Textures datasets, the standard MSP and Mahalanobis
models perform the best when using CIFAR100 as ID
data. This is likely the case because when training on
the CIFAR100 data, the model learns more different
features than when training on CIFAR10 or SVHN.
This means that the features from the OOD datasets
are more likely to be present in the known features of
the model due to its inclusiveness. This also explains
why Mixup obtains high accuracy but a low OOD per-
formance. Due to the more inclusive features, the fea-
tures of the OOD data are more likely to fall within
the same range as the features of the ID data.
5 CONCLUSION
We have shown that current OOD detection meth-
ods rely heavily on the difference in features between
datasets and are therefore only able to detect the co-
variate shift. This reliance on covariate shift poses
some future problems since detecting the semantic
shift between images is debatably just as crucial.
The model training can then be altered in order
to obtain better OOD detection methods. In this
work we have highlighted the erase data augmenta-
tion, which obtains the best performance with only
a single adaption to the training procedure for most
ID-OOD dataset pairs. When using the erase method
in combination with the Mahalanobis distance, it also
consistently obtains the best results when using the
SVHN and Textures datasets as OOD.
Although model training seems to be a useful tool
for improving OOD detection performance, it does
come with problems. As seen in Table 2, when us-
ing CIFAR100 as ID dataset, the OOD performance
drops as opposed to the other ID datasets. This likely
happens because of the more inclusive feature space
learned by the model. A similar phenomenon is also
seen when using Mixup to train the CNN, although
the accuracy improves, the OOD performance is rel-
atively low. This also makes it difficult to state that
a richer feature space would lead to better OOD per-
formance, as it can go both ways. It is therefore more
fair to state that a more discriminative feature space
leads to better OOD performance and that a more dis-
criminative feature space is often the result of a richer
feature space.
As a future work, it should be investigated what
it means to have a more discriminative feature space
as opposed to a rich feature space. When does a
model become more inclusive and when does it be-
come more discriminative? Conversely, how can we
define discriminative and inclusiveness in OOD de-
tection? These research questions pair well with the
investigation of Mixup, which obtains better classifi-
cation performance but does not increase OOD detec-
tion performance, as well as the investigation of why
the OOD performance when training on CIFAR100 is
so different from the OOD performance when training
The Effect of Covariate Shift and Network Training on Out-of-Distribution Detection
729

on CIFAR10. We believe that these future research
questions combined with the results from this paper
pave the way for safer use of neural networks.
REFERENCES
Betta, G., Capriglione, D., Liguori, C., and Paolillo, A.
(2011). Uncertainty Evaluation in Face Recognition
Algorithms. IEEE International Instrumentation and
Measurement Technology Conference (I2MTC).
Boone, L., Biparva, M., Forooshani, P. M., Ramirez, J.,
Masellis, M., Bartha, R., Symons, S., Strother, S.,
Black, S. E., Heyn, C., Martel, A. L., Swartz, R. H.,
and Goubran, M. (2022). ROOD-MRI: Benchmarking
the Robustness of Deep Learning Segmentation Mod-
els to Out-of-Distribution and Corrupted Data in MRI.
Technical report.
Chang, J., Lan, Z., Cheng, C., and Wei, Y. (2020). Data
Uncertainty Learning in Face Recognition. In CVPR.
Corbi
`
ere, C., Thome, N., Bar-Hen, A., Cord, M., and P
´
erez,
P. (2019). Addressing Failure Prediction By Learning
Model Confidence. In NeurIPS.
Cubuk, E. D., Zoph, B., Mane, D., Vasudevan, V., and Le,
Q. V. (2019). Autoaugment: Learning augmentation
strategies from data. In CVPR.
DeVries, T. and Taylor, G. W. (2018). Learning Confidence
for Out-of-Distribution Detection in Neural Networks.
Technical report.
Drucker, H. and Cun, Y. L. (1992). Improving General-
ization Performance Using Double Backpropagation.
IEEE Transactions on Neural Networks.
Fort, S., Ren, J., and Lakshminarayanan, B. (2021). Ex-
ploring the Limits of Out-of-Distribution Detection.
In NeurIPS.
He, K., Zhang, X., Ren, S., and Sun, J. (2015). Deep Resid-
ual Learning for Image Recognition. Technical report.
Hendrycks, D., Basart, S., Mazeika, M., Zou, A., Kwon, J.,
Mostajabi, M., Steinhardt, J., and Song, D. (2019a).
A Benchmark for Anomaly Segmentation.
Hendrycks, D., Basart, S., Mazeika, M., Zou, A., Kwon, J.,
Mostajabi, M., Steinhardt, J., and Song, D. (2019b).
Scaling Out-of-Distribution Detection for Real-World
Settings. In ICML.
Hendrycks, D. and Gimpel, K. (2016). A Baseline for De-
tecting Misclassified and Out-of-Distribution Exam-
ples in Neural Networks. In ICLR.
Hendrycks, D., Mazeika, M., and Dietterich, T. (2018).
Deep Anomaly Detection with Outlier Exposure. In
ICLR.
Huang, R. and Li, Y. (2021). MOS: Towards Scaling Out-
of-distribution Detection for Large Semantic Space.
In CVPR.
Ilyas, A., Santurkar, S., Tsipras, D., Engstrom, L., Tran, B.,
and Madry, A. (2019). Adversarial Examples Are Not
Bugs, They Are Features. In NeurIPS.
Kuangliu (2021). Kuangliu/Pytorch-CIFAR: 95.47% on CI-
FAR10 with pytorch.
Lee, K., Lee, H., Lee, K., and Shin, J. (2017). Training
Confidence-calibrated Classifiers for Detecting Out-
of-Distribution Samples. In ICLR.
Lee, K., Lee, K., Lee, H., and Shin, J. (2018). A Simple
Unified Framework for Detecting Out-of-Distribution
Samples and Adversarial Attacks. NeurIPS.
Liang, S., Li, Y., and Srikant, R. (2017). Enhancing the
Reliability of Out-of-Distribution Image Detection in
Neural Networks. ICLR.
Liu, W., Wang, X., Owens, J. D., and Li, Y. (2020). Energy-
based Out-of-distribution Detection. In NeurIPS.
Mehrtash, A., Wells, W. M., Tempany, C. M., Abolmae-
sumi, P., and Kapur, T. (2020). Confidence Calibra-
tion and Predictive Uncertainty Estimation for Deep
Medical Image Segmentation. IEEE Transactions on
Medical Imaging.
Nesterov, Y. E. (1983). A Method of Solving a Convex
Programming Problem With Convergence rate. Pro-
ceedings of the USSR Academy of Sciences.
Raghu, M., Blumer, K., Sayres, R., Obermeyer, Z., Klein-
berg, R., Mullainathan, S., and Kleinberg, J. (2019).
Direct Uncertainty Prediction for Medical Second
Opinions. In ICML.
Roady, R., Hayes, T. L., Kemker, R., Gonzales, A., and
Kanan, C. (2019). Are Out-of-Distribution Detection
Methods Effective on Large-Scale Datasets? Techni-
cal report.
Sastry, C. S. and Oore, S. (2020). Detecting Out-of-
Distribution Examples with Gram Matrices. In ICML.
Sun, Y., Guo, C., and Li, Y. (2021). ReAct: Out-of-
distribution Detection With Rectified Activations. In
NeurIPS.
Vojir, T., Sipka, T., Aljundi, R., Chumerin, N., Olmeda
Reino, D., and Matas, J. (2021). Road Anomaly De-
tection by Partial Image Reconstruction with Segmen-
tation Coupling. In ICCV.
Winkens, J., Bunel, R., Roy, A. G., Stanforth, R., Natara-
jan, V., Ledsam, J. R., MacWilliams, P., Kohli, P.,
Karthikesalingam, A., Kohl, S., Cemgil, T., Eslami,
S. M. A., and Ronneberger, O. (2020). Contrastive
Training for Improved Out-of-Distribution Detection.
Technical report.
Yang, J., Wang, H., Feng, L., Yan, X., Zheng, H.,
Zhang, W., and Liu, Z. (2021a). Generalized Out-of-
Distribution Detection: A Survey. Technical report.
Yang, J., Wang, H., Feng, L., Yan, X., Zheng, H., Zhang,
W., and Liu, Z. (2021b). Semantically Coherent Out-
of-Distribution Detection. In ICCV.
Zhang, H., Cisse, M., Dauphin, Y. N., and Lopez-Paz, D.
(2018). MixUp: Beyond Empirical Risk Minimiza-
tion. In ICLR.
Zhong, Z., Zheng, L., Kang, G., Li, S., and Yang, Y. (2020).
Random Erasing Data augmentation. In Proceedings
of the AAAI Conference on Artificial Intelligence.
Zisselman, E. and Tamar, A. (2020). Deep Residual Flow
for Out of Distribution Detection. In CVPR.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
730
