
Joint Training of Product Detection and Recognition Using Task-Specific
Datasets
Floris De Feyter
a
and Toon Goedem
´
e
b
EAVISE—PSI—ESAT, KU Leuven, Sint-Katelijne-Waver, Belgium
{floris.defeyter, toon.goedeme}@kuleuven.be
Keywords:
Product Detection and Recognition, Joint Detection and Recognition, Task-Specific Training.
Abstract:
Training a single model jointly for detection and recognition is typically done with a dataset that is fully
annotated, i.e., the annotations consist of boxes with class labels. In the case of retail product detection and
recognition, however, developing such a dataset is very expensive due to the large variety of products. It would
be much more cost-efficient and scalable if we could employ two task-specific datasets: one detection-only
and one recognition-only dataset. Unfortunately, experiments indicate a significant drop in performance when
trained on task-specific data. Due to the potential cost savings, we are convinced that more research should
be done on this matter and, therefore, we propose a set of training procedures that allows us to carefully
investigate the differences between training with fully-annotated vs. task-specific data. We demonstrate this
on a product detection and recognition dataset and as such reveal one of the core issues that is inherent to
task-specific training. We hope that our results will motivate and inspire researchers to further look into the
problem of employing task-specific datasets to train joint detection and recognition models.
1 INTRODUCTION
In the retail industry, planogram compliance refers to
the compliance between the planned layout of a store
rack (i.e., the planogram) and its true layout. These
planograms are the result of negotiations between
the retailer and the manufacturers. Sales representa-
tives of the manufacturing companies have the task
to regularly verify that the true shelf layout complies
with the agreements that were made. This involves
taking a photo of the store rack, drawing bounding
boxes around each product and annotating each prod-
uct with a label. Clearly, this is a time-intensive and
cumbersome job. A system that could automatically
recognize the products that are on the shelves of a
supermarket, would make the process of verifying
planogram compliance much more efficient.
In general, there are two ways to develop such
a system. First, a pipeline consisting of two mod-
els could be built: one model (the detector) detects
where there are products in the image, another model
(the encoder) extracts an embedding for each product
region that can be employed for comparison. This ap-
proach is frequently used in facial recognition (Wang
et al., 2019), but has also already been proposed for
a
https://orcid.org/0000-0003-2690-0181
b
https://orcid.org/0000-0002-7477-8961
(a) (b) (c)
Figure 1: Samples from (a) a detection-only dataset; (b) a
recognition-only dataset; (c) a dataset with both detection
and recognition annotations.
retail product recognition (Tonioni et al., 2018). Sec-
ond, a single model could be trained to jointly per-
form product detection and recognition. In person
search literature (Munjal et al., 2019; Xiao et al.,
2017; Xiao et al., 2019), this combination of detec-
tion and recognition has been achieved by adding an
extra Region of Interest (RoI) head to a typical de-
tector network like Faster R-CNN (Ren et al., 2015).
This extra head outputs the necessary recognition em-
bedding. Figure 2 shows an example of such a joint
network architecture.
The advantage of the two-models approach is
that we can train on two task-specific datasets (see
Figs. 1 (a) and (b)), i.e., one dataset that contains de-
tection annotations and one dataset that contains la-
beled single products. This leads to interesting cost
reductions in dataset development. Indeed, a recog-
nition dataset containing individual products is read-
De Feyter, F. and Goedemé, T.
Joint Training of Product Detection and Recognition Using Task-Specific Datasets.
DOI: 10.5220/0011725100003417
In Proceedings of the 18th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2023) - Volume 5: VISAPP, pages
715-722
ISBN: 978-989-758-634-7; ISSN: 2184-4321
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
715

ily available to most retail stores, so only a dataset
with bounding boxes (without a class label) would
need to be developed. The disadvantage of the two-
models approach is that it is very computationally ex-
pensive, since all detected products need to be passed
through a second model. The joint approach does not
have such a computational bottleneck. However, pre-
vious work has always trained such a model on a fully-
annotated dataset (see Fig. 1 (c)), i.e., a dataset that
contains a product label for each bounding box (Mun-
jal et al., 2019; Ranst et al., 2018; Xiao et al., 2019;
Xiao et al., 2017). Such a dataset is much more costly
to develop.
One could wonder if, instead, the joint approach
could also be trained on task-specific datasets. Sur-
prisingly, however, to the best of our ability, we
were unable to find any previous work that con-
cerned this topic. A lot of research has been done on
semi-supervised object (SSOD) detection (Fang et al.,
2021; Redmon and Farhadi, 2016; Zhou et al., 2022),
and while parallels can be drawn, SSOD is clearly dif-
ferent from the approach proposed here. With SSOD,
part of the data is fully annotated with bounding boxes
and class labels, and another part of the data is only
annotated on the image level with one or more labels
per image (i.e., weak labeling). The annotations of the
detection dataset should contain class labels that even
partly overlap with the labels in the weakly-labeled
dataset. In the set-up we wish to investigate, there is
a strict boundary between both datasets: one dataset
only contains bounding boxes, the other one only con-
tains labeled images of individual products.
Our experiments suggest why we could not find
any previous publications on the matter: a joint
model trained on task-specific datasets clearly per-
forms worse than the same joint model trained on a
fully-annotated dataset. Due to the potential cost sav-
ings, however, we are convinced that training on task-
specific datasets deserves more exposure in the litera-
ture, and that it is worth the effort to look for causes
of its lower performance. Therefore, we propose a
novel method to carefully evaluate the differences be-
tween both training procedures. We first train a joint
model on a fully-annotated dataset and gradually ap-
ply changes to the training procedure until we end
up with training on task-specific datasets. With this
framework, any issues that occur during the transfor-
mation process can be pointed out and as such provide
focus points to work on when attempting to close the
performance gap.
2 RELATED WORK
2.1 Product Detection and Recognition
The automated recognition of products in stores is
a long-standing problem with many proposed solu-
tions. Many of the early proposed works focus on
using RFID-tags, barcodes or QR-codes that are at-
tached to each product (Kulyukin et al., 2005; L
´
opez-
de-Ipi
˜
na et al., 2011). Computer vision-based tech-
niques, however, offer a potentially less intrusive and
more scalable approach to product recognition. There
are two tasks to be performed: detection, i.e., find-
ing out where there are products in the image; and
recognition (or, classification), i.e., finding out which
product is present in a product region. While a lot
of research has been done on employing classic com-
puter vision techniques for both product detection and
product classification (George et al., 2015; Merler
et al., 2007; Tonioni and Di Stefano, 2017), most re-
cent work focuses on using deep learning techniques.
Solutions have been proposed for both deep learning-
based product classification and deep learning-based
product detection (Goldman et al., 2019; Qiao et al.,
2017; Srivastava, 2020).
Most relevant to our work, however, are the meth-
ods that combine product detection and classifica-
tion (Fuchs et al., 2019; Hao et al., 2019). Often,
these models need to be (partly) retrained every time
a new product class is added, limiting the scalabil-
ity of the pipelines. In the product recognition liter-
ature, only Tonioni et al. (Tonioni et al., 2018) and
Osokin et al. (Osokin et al., 2020) propose a prod-
uct detection and recognition system that can also be
used for products that were not present in the origi-
nal training dataset. Tonioni et al. use a separate de-
tector and encoder model, where each detected prod-
uct is cropped out and passed through the encoder.
While their results are satisfactory, the two-stage de-
sign causes a computational bottleneck at the encoder
part of the pipeline (Tonioni et al., 2018). Osokin
et al. propose a solution in a one-shot object detec-
tion setting (Osokin et al., 2020). Via a pairwise-
correlation of the feature maps of the query (rack)
image and of each of the gallery images, their model
computes geometric transformation parameters that
map the gallery images to matching locations in the
query image. Adding new products to the gallery only
requires the computation of their feature maps once.
However, their method needs a training dataset that
is annotated with bounding boxes and class labels,
which we explicitly wish to avoid.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
716
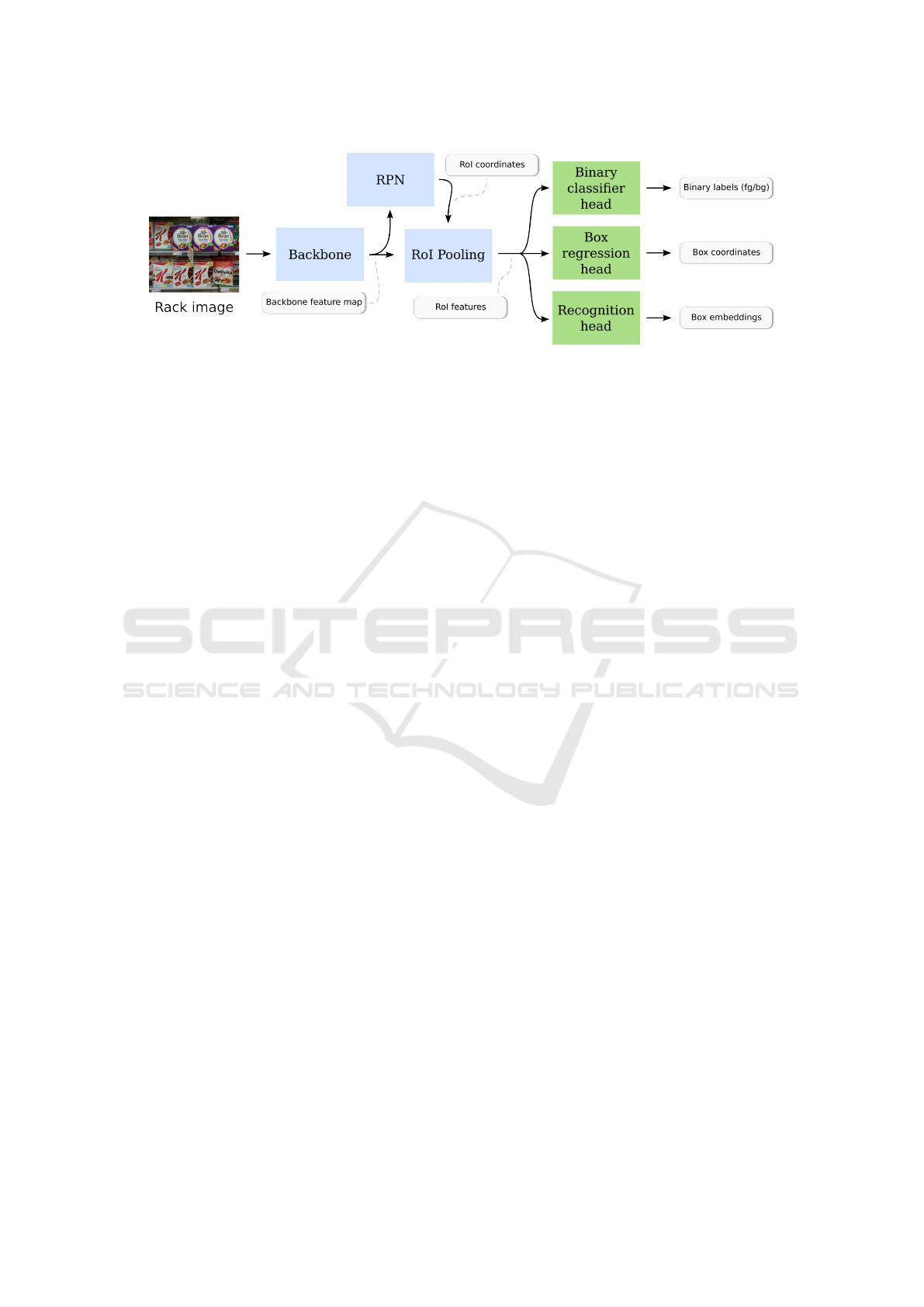
Figure 2: High-level overview of the joint architecture we use in this paper. The outputs of the different components are
indicated with the light gray boxes.
2.2 Joint Detection and Recognition
An important property of the model considered in
this paper, is that both product detection and product
recognition are performed at once. In the area of per-
son search and person re-identification, this has been
coined as joint detection and recognition (Munjal
et al., 2019; Ranst et al., 2018; Xiao et al., 2017; Xiao
et al., 2019). All of these methods start from a stan-
dard detector (either Faster R-CNN (Ren et al., 2015)
or YOLOv2 (Redmon and Farhadi, 2016)) and mod-
ify it in such a way that, for each bounding box, an
embedding is returned that can be used for the recog-
nition task. Similar architectures can also be found
in the field of few-shot object detection (Kang et al.,
2019; Wang et al., 2020; Zhou et al., 2022), where
the task is to detect and classify an object based on
only a few (typically < 10) examples. While product
detection and recognition certainly is a valid use-case
of few-shot object detection (as (Osokin et al., 2020)
shows), all these methods require a fully-annotated
dataset.
3 METHOD
To identify issues that arise when training a joint
model on task-specific datasets, we define four pro-
cedures for training the model. The first one, Proc. 1,
is simply the well-known multi-class detector train-
ing, trained on a fully-annotated dataset. The last one,
Proc. 4, describes how one could train a joint architec-
ture on task-specific datasets. Starting from Proc. 1,
each next procedure is a slightly modified version of
the previous one. When one of the procedures fails
while the previous one worked, we have identified an
issue that decreases the performance of Proc. 4.
Note that, for all except Proc. 4, we need a fully-
annotated dataset. In our experiments, we used the
GroZi-3.2k dataset (George and Floerkemeier, 2014)
with annotations from Tonioni and Di Stefano (To-
nioni and Di Stefano, 2017). This dataset is not large
enough for a production-ready model (see Sec. 4 for
more details), but it suffices to demonstrate how the
procedures below can be applied. Also, note that
the forward pass during test time is exactly the same
for all the procedures: a store rack image is passed
through the model, which returns a set of bound-
ing boxes, binary class labels and recognition embed-
dings.
Procedure 1 (Conventional Detector Training). The
model is trained with a fully-annotated dataset. A
batch of product rack images is passed through the
joint architecture and we obtain a set of bounding
boxes, binary class labels (foreground/background)
and recognition embeddings (along with region pro-
posals and objectness scores from the RPN). For each
of these outputs, we have an annotated ground truth,
so we can compute a loss value and train the network
with a gradient descent-like optimization algorithm.
Fig. 3 shows an example of how these losses could be
computed.
Procedure 2 (Two-Phase Training). Unlike Proce-
dure 1, the batch of rack images is passed through
the joint architecture twice. Weight updates are ap-
plied after each training phase separately. During
the detection training phase, the batch goes through
all the network components, except the recognition
head. Losses are computed for the RPN, bounding
box regression and foreground vs. background classi-
fication. During the recognition training phase, the
batch only goes through the backbone and the recog-
nition head. We use the ground truth bounding boxes
to apply RoI pooling on the feature maps that come
out of the backbone. During this phase, only the
recognition loss is computed. More specifically, the
loss is calculated from the ground-truth product label
of the bounding box used during RoI pooling. An ex-
ample of the loss computation during the recognition
training phase, is illustrated in Fig. 4.
Joint Training of Product Detection and Recognition Using Task-Specific Datasets
717
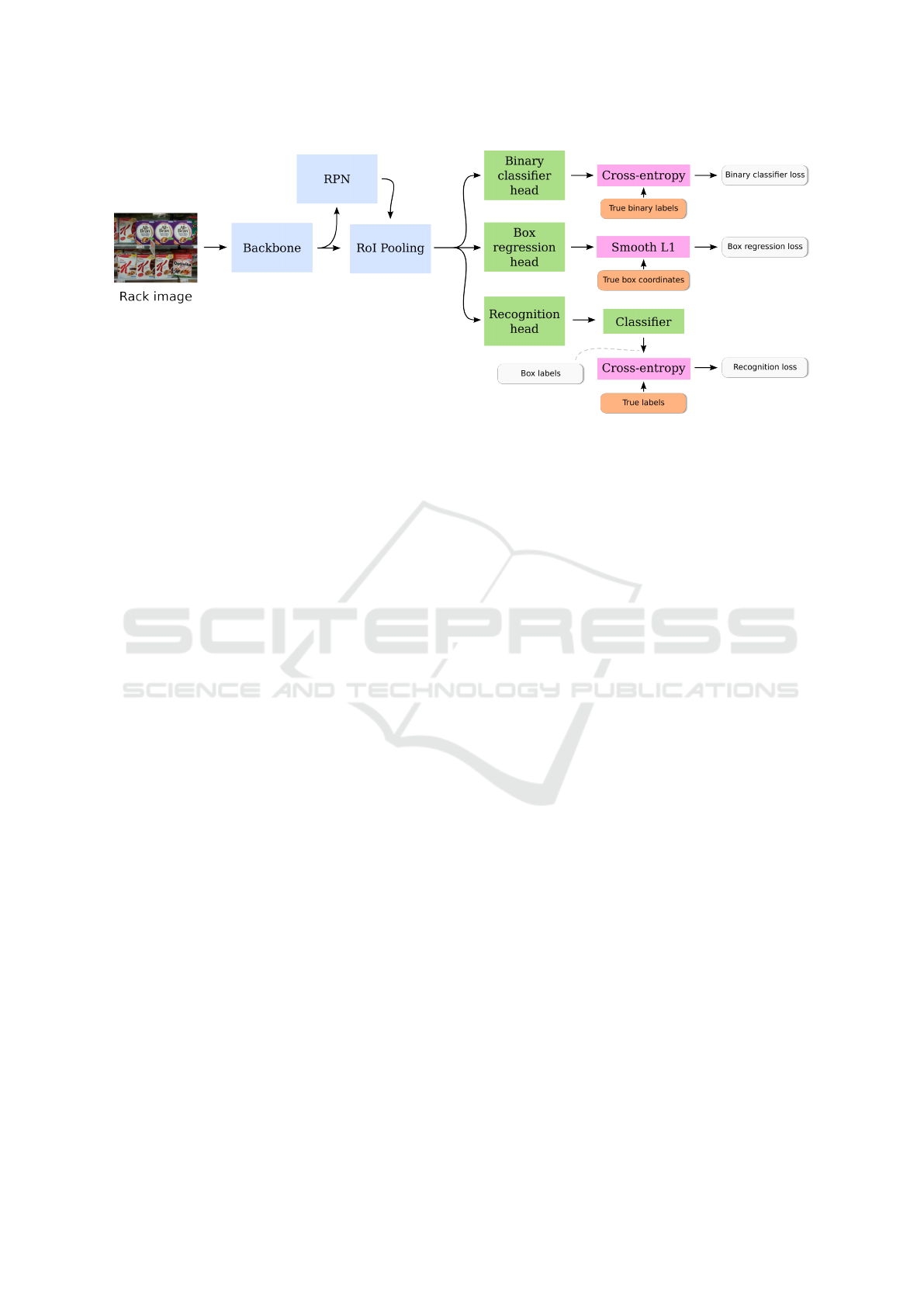
Figure 3: Computation of the detection and recognition losses of a joint architecture trained with Procedure 1 (Conventional
detector training). The outputs of the model components shown in Fig. 2 are omitted for clarity.
Procedure 3 (Crop-Batch Training). The training
phase for detection is the same as in Proc. 2, but dur-
ing the recognition training phase, we use a batch of
image crops as input, instead of the entire images. We
again use the respective ground-truth bounding boxes
of each crop in the batch to apply RoI pooling on the
feature maps that are returned by the backbone. This
is illustrated in Fig. 5. Note that we do not resize the
crops, such that the absolute size of products in im-
ages during both training phases stays the same.
Procedure 4 (Task-Specific Training). Again, the de-
tection training phase is the same as in Proc. 2. The
input of the recognition training phase, however, now
consists of individual product images. RoI pooling
is applied on the entire backbone feature map. See
Fig. 6 for an example.
4 IMPLEMENTATION
In this section, we demonstrate how the procedures
described in Sec. 3 can be applied. The code, data
and instructions on how to reproduce the results can
be found on https://github.com/florisdf/jpdr.
For our joint model, we follow previous
work (Munjal et al., 2019; Ranst et al., 2018; Xiao
et al., 2017; Xiao et al., 2019) and add an extra RoI
head (Girshick, 2015) to a well-studied detector archi-
tecture, in our case Faster R-CNN with a ResNet-50
Feature Pyramid Network (FPN) backbone (He et al.,
2016; Lin et al., 2017; Ren et al., 2015). The extra RoI
head returns a 512-dimensional recognition embed-
ding for the corresponding region of interest by pass-
ing the RoI features through a fully-connected layer.
Each model is trained on the GroZi-3.2k (George
and Floerkemeier, 2014) dataset with the improved
annotations of Tonioni and Di Stefano (Tonioni and
Di Stefano, 2017). This dataset consists of 123 im-
ages of store racks (similar to the input image shown
in Fig. 2) with an average of 13 products per image.
In total, the dataset contains 286 different products.
We split up the images in the dataset into five equally-
sized random folds from which four are used for train-
ing and one is used for validation. The results that we
report are always the average of five runs, each with a
different combination of training and validation folds.
For the RPN, the bounding box regression head
and the binary classifier head, we use the same losses
as described in (Ren et al., 2015). To compute a loss
for the recognition head, we append an extra fully-
connected layer that transforms the recognition em-
bedding into a vector of dimension L—with L the
number of product labels in the dataset—and apply
softmax cross-entropy loss to that vector. We train
each model for 500 epochs with a constant learning
rate of 0.01 on an NVIDIA Tesla V100 GPU. The
ResNet-50 FPN backbone of our model is pretrained
on ImageNet (Deng et al., 2009) and frozen, except
for the last layer. The layers of the RPN and the RoI
heads are randomly initialized. We use stochastic gra-
dient descent to optimize the model weights.
For Proc. 1 and the detection phases of the other
procedures, the input images are resized so that their
shortest size is 960 px and are then randomly cropped
to a size of 800 × 800 px. We use a batch size of 2.
The recognition phase of Proc. 2 uses the same input
data, transformation pipeline and batch size. For the
recognition phase of Proc. 3, we also start from the
same data and, as we want the products in the crops
to have the same absolute size as during the detection
phase, we apply the same transformation pipeline. To
create the crops, we center a box of size s
c
×s
c
at each
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
718
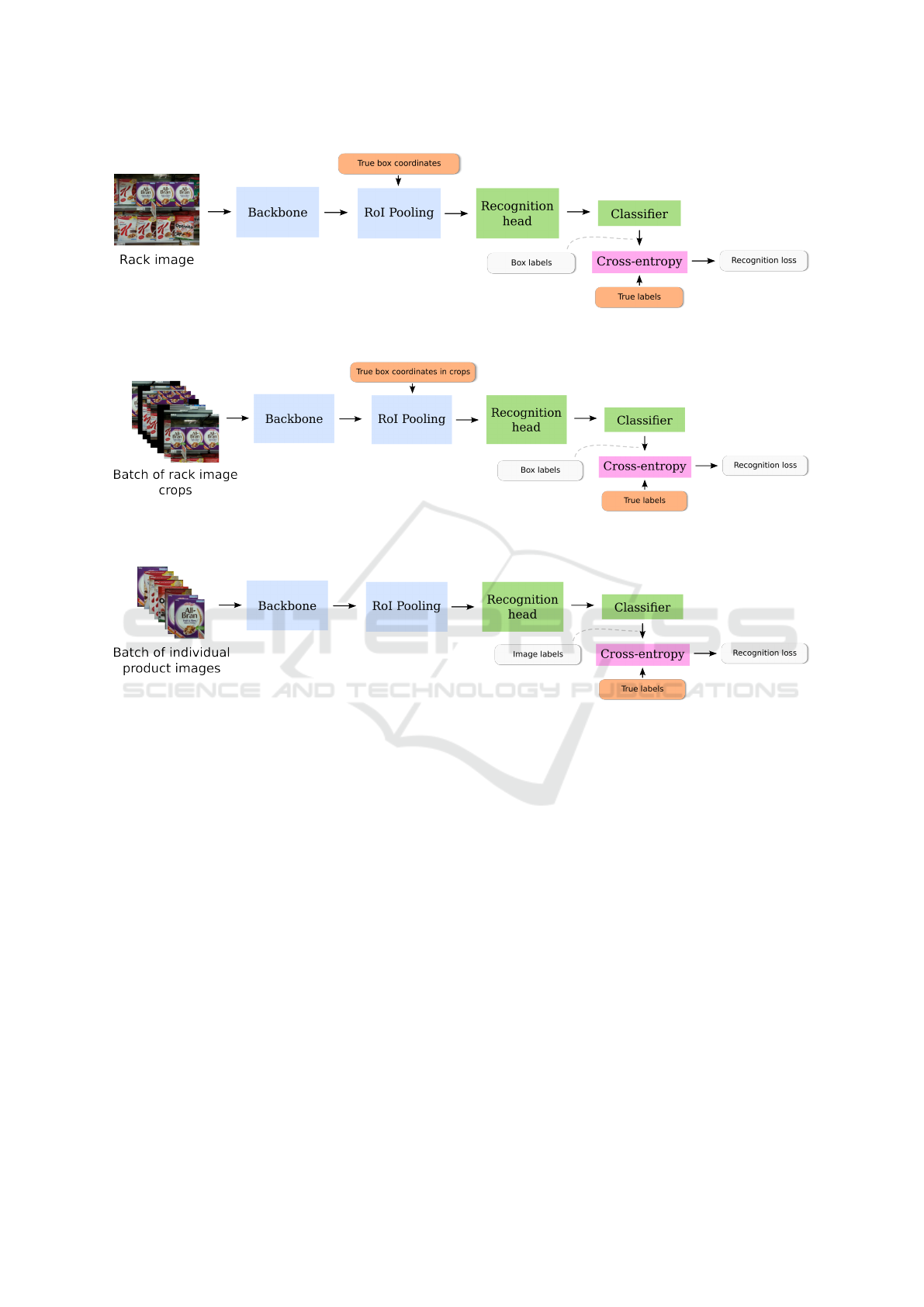
Figure 4: Computation of the recognition loss during Procedure 2 (Two-phase training). We use the ground-truth bounding
boxes for RoI pooling instead of region proposals.
Figure 5: Computation of the recognition loss during Procedure 3 (Crop-batch training). Note that the input is a batch of
crops of a rack image. We use the ground-truth bounding boxes in each crop for RoI pooling.
Figure 6: Computation of the recognition loss during Procedure 4 (Task-specific training). Note that the input is a batch of
individual product images. The RoI pooling is now applied on the entire feature map.
product location, with s
c
a predefined crop size. When
multiple boxes overlap with more than 50% IoU, only
one of them will be kept. Crops that partly fall outside
the image will be filled up with zeroes in that area. If
more than 50% of a crop’s area is outside the image,
the crop is not used.
During validation, we resize the store rack images
to a shortest size of 960 px and apply a center crop of
800×800 px. The images are passed through the joint
network (including all three RoI heads). We employ
the classifier that was used to compute the softmax
cross-entropy training loss to classify the recognition
embedding of each detection. Together with the re-
sult of the bounding box regression head, these prod-
uct labels and confidence scores can be employed to
compute the COCO AP (Doll
´
ar and Lin, 2022; Lin
et al., 2015) metric.
5 RESULTS
Figure 8 shows the COCO AP for Procs. 1, 2 and
3 (for s
c
= 800 px and s
c
= 300 px). When s
c
=
800 px, a lot of crop boxes will overlap and/or fall
largely outside the 800 × 800 px input image and
as such be removed (see Sec. 4). In fact, only a
single 800 × 800 px “crop” will remain, positioned
around the center of the image, such that Proc. 3 be-
comes similar to Proc. 2. Since, after the transfor-
mation pipeline, the average size of the products in
the GroZi-3.2k dataset is around 300 × 300 px, when
s
c
= 300 px, Proc. 3 is similar to Proc. 4. To get an
idea of what these crops look like for different crop
sizes, see Fig. 7.
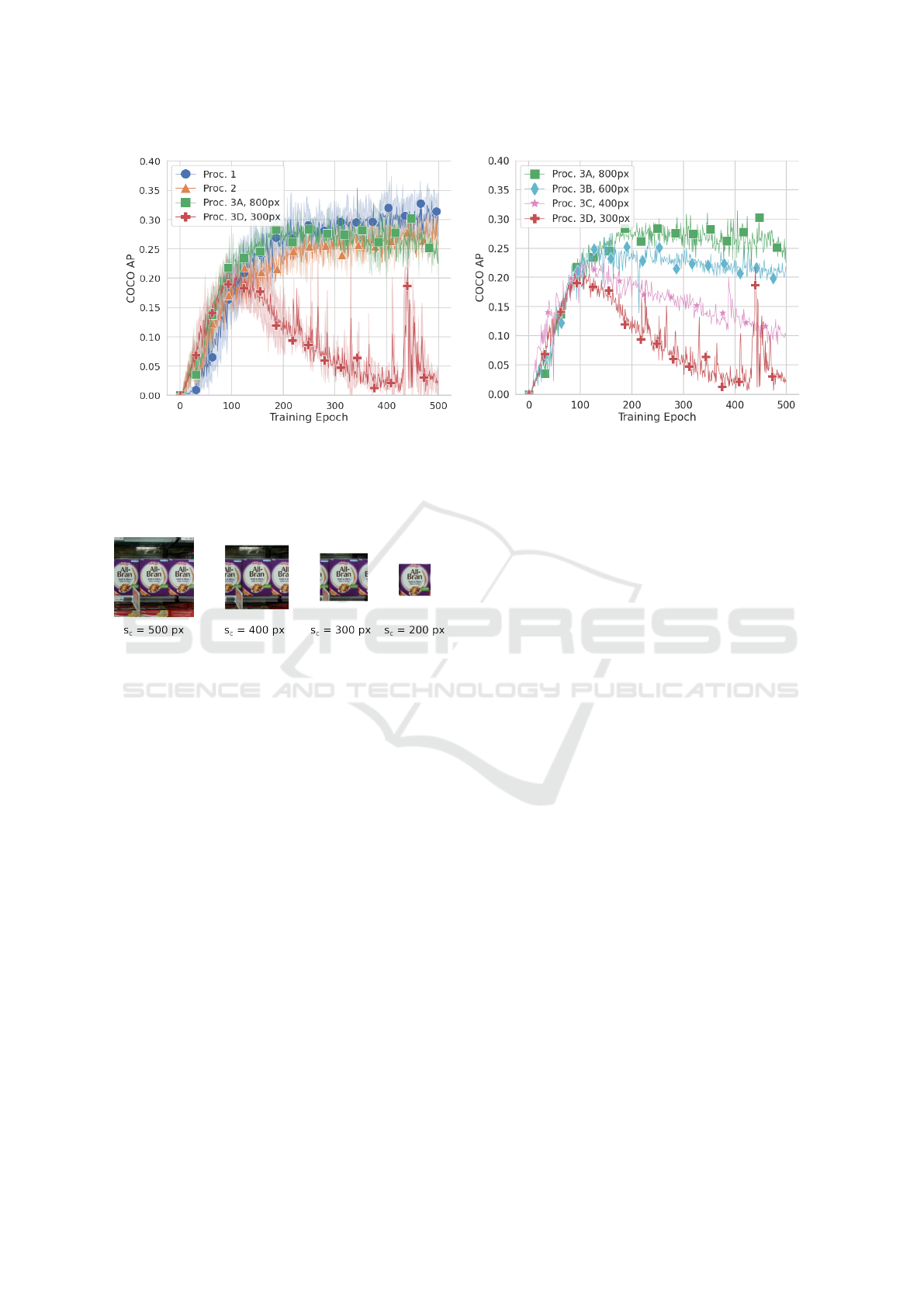
As we can see in Fig. 8 (a), Procs. 1, 2 and 3A
perform similarly. This indicates that splitting up
the training in a detection and a recognition phase,
does not harm the performance of the model com-
Joint Training of Product Detection and Recognition Using Task-Specific Datasets
719
(a) (b)
Figure 8: Validation COCO AP evaluated during training on the GroZi-3.2k dataset for (a) Procs. 1, 2 and two versions of
Proc. 3; and (b) multiple versions of Proc. 3. The lines indicate the mean after five-fold cross-validation and the bands in (a)
show the standard deviation. As crops fit more tightly around individual products, the validation AP starts to drop after 100
epochs.
Figure 7: Example of multiple crop sizes (centered around
the same product) that can be used for Proc. 3. As the crop
size becomes smaller, the amount of rack context decreases.
pared to training it as a conventional multi-class de-
tector. Also, employing ground-truth bounding boxes
for RoI pooling during recognition training, does not
seem to be a problem. Proc. 3D, however, clearly
yields inferior results. The COCO AP rises the first
100 epochs, but drops significantly after that. The
maximum COCO AP achieved by Proc. 3 is clearly
about ten percent points lower than the other proce-
dures. These results suggest that separately training
the recognition head on crops that tightly fit around
individual products, seriously harms the performance
of a joint product detection and recognition architec-
ture. This is also confirmed by Fig. 8 (a), where we
let s
c
decrease from 800 px to 300 px with more in-
termediary crop sizes.
6 DISCUSSION
In Section 5, we ran our implementations of Procs. 1,
2 and 3. The experiments show that when s
c
= 800 px,
Proc. 3 performed similarly to the previous proce-
dures. However, when s
c
= 300 px, we saw a per-
formance drop. Due to the careful definition of the
procedures in Sec. 3, we can easily identify that a
smaller crop size is causing a difference in model per-
formance.
Why is this the case? First of all, it could be that,
as the crop size becomes smaller, either the recog-
nition or the detection task is performing worse. To
investigate this, we keep track of two extra metrics
during training. The first one evaluates the recogni-
tion performance. More specifically, we crop individ-
ual products out of the validation data and pass these
through the backbone and recognition head. The re-
sulting product embeddings are classified using the
trained classifier from the softmax cross-entropy loss
function. As such, we obtain a predicted label, along
with a confidence score that can be used to compute
a Precision-Recall-curve and an AP. For each valida-
tion epoch, we report the average of all image APs as
the mAP. Fig. 9 (a) shows that there is no noteworthy
difference in the recognition validation performance
of any of the versions of Proc. 3. Second, we evaluate
the COCO AP for product/no product classification
during training. When this metric is low, it indicates
that the detection task itself is failing. Figure 9 (b)
shows a slight decrease in the COCO AP when the
crop size becomes smaller, but by no means compa-
rable to the drastic decrease we see in Fig. 8 (b).
We conclude that, for all crop sizes, the individ-
ual subtasks perform similar on validation data. Only
when we combine both tasks and pass RoI features
that come from an entire rack image to the recogni-
tion head, performance decreases. As such, we are
convinced that, when trained on smaller crops, the
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
720
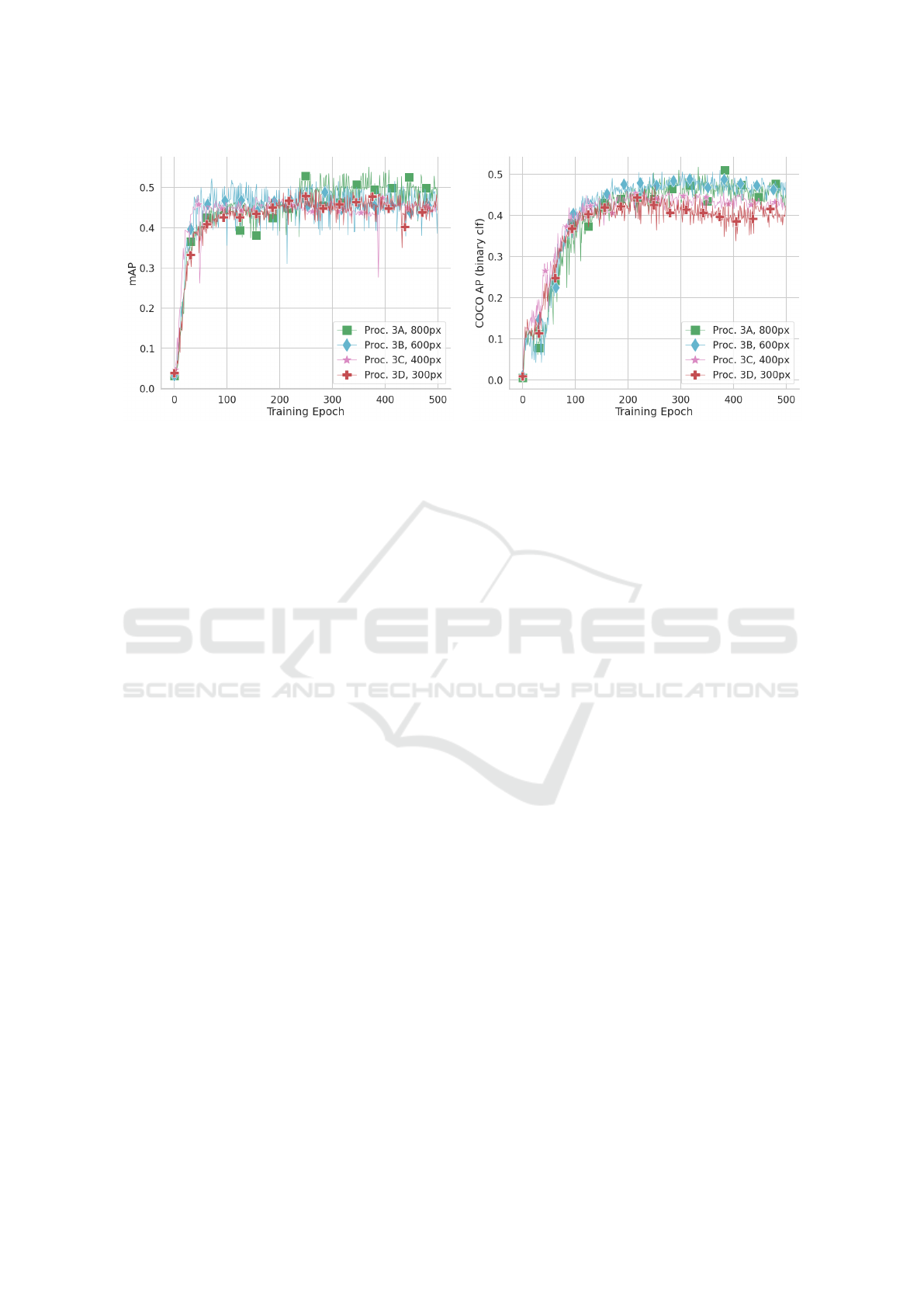
(a) (b)
Figure 9: Validation (a) mAP of the recognition pipeline; and (b) COCO AP of detection pipeline during training for multiple
versions of Proc. 3 on the GroZi-3.2k validation folds. Both recognition and detection seem to perform more ore less equally
for different crop sizes.
recognition head does not learn to cope with the extra
context that is unavoidably present in the RoI features
during validation. This causes the total pipeline to
perform worse.
7 CONCLUSION
In this paper, we proposed a set of training procedures
to investigate the issue of employing task-specific
training for a joint detection and recognition network
architecture. With these procedures, we exposed an
important problem that hinders task-specific training.
Our experiments suggest that, by training on tightly-
fit product crops, the recognition head of the joint ar-
chitecture never learns to cope with the context infor-
mation that is present in feature maps during infer-
ence. This inability hinders the model to achieve sim-
ilar performance to a model trained on fully-annotated
data.
We hope that both the proposed training proce-
dures and our findings on the influence of context
during validation will aid future research in solving
task-specific training of joint detection and recogni-
tion models.
REFERENCES
Deng, J., Dong, W., Socher, R., Li, L., Kai Li, and Li Fei-
Fei (2009). ImageNet: A large-scale hierarchical im-
age database. In 2009 IEEE Conference on Computer
Vision and Pattern Recognition, pages 248–255.
Doll
´
ar, P. and Lin, T.-Y. (2022). Cocodataset/cocoapi. coco-
dataset.
Fang, S., Cao, Y., Wang, X., Chen, K., Lin, D., and Zhang,
W. (2021). WSSOD: A New Pipeline for Weakly- and
Semi-Supervised Object Detection.
Fuchs, K., Grundmann, T., and Fleisch, E. (2019). Towards
identification of packaged products via computer vi-
sion: Convolutional neural networks for object detec-
tion and image classification in retail environments.
In ACM International Conference Proceeding Series,
pages 1–8, New York, New York, USA. Association
for Computing Machinery.
George, M. and Floerkemeier, C. (2014). Recognizing
Products: A Per-exemplar Multi-label Image Classifi-
cation Approach. In Fleet, D., Pajdla, T., Schiele, B.,
and Tuytelaars, T., editors, Computer Vision – ECCV
2014, volume 8690, pages 440–455. Springer Interna-
tional Publishing, Cham.
George, M., Mircic, D., Soros, G., Floerkemeier, C.,
and Mattern, F. (2015). Fine-Grained Product Class
Recognition for Assisted Shopping. In 2015 IEEE In-
ternational Conference on Computer Vision Workshop
(ICCVW), pages 546–554, Santiago. IEEE.
Girshick, R. (2015). Fast R-CNN. In The IEEE Interna-
tional Conference on Computer Vision (ICCV), pages
1440–1448, Santiago, Chile.
Goldman, E., Herzig, R., Eisenschtat, A., Goldberger, J.,
and Hassner, T. (2019). Precise Detection in Densely
Packed Scenes. In The IEEE Conference on Computer
Vision and Pattern Recognition (CVPR), pages 5227–
5236.
Hao, Y., Fu, Y., and Jiang, Y.-G. (2019). Take Goods from
Shelves: A Dataset for Class-Incremental Object De-
tection. In Proceedings of the 2019 on International
Conference on Multimedia Retrieval, pages 271–278,
Ottawa ON Canada. ACM.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep Resid-
ual Learning for Image Recognition. In The IEEE
Joint Training of Product Detection and Recognition Using Task-Specific Datasets
721

Conference on Computer Vision and Pattern Recog-
nition (CVPR), pages 770–778, Las Vegas, NV, USA.
IEEE.
Kang, B., Liu, Z., Wang, X., Yu, F., Feng, J., and Dar-
rell, T. (2019). Few-Shot Object Detection via Fea-
ture Reweighting. In Proceedings of the IEEE/CVF
International Conference on Computer Vision, pages
8420–8429.
Kulyukin, V., Gharpure, C., and Nicholson, J. (2005).
RoboCart: Toward robot-assisted navigation of gro-
cery stores by the visually impaired. In 2005
IEEE/RSJ International Conference on Intelligent
Robots and Systems, pages 2845–2850.
Lin, T.-Y., Doll
´
ar, P., Girshick, R., He, K., Hariharan,
B., and Belongie, S. (2017). Feature Pyramid Net-
works for Object Detection. In The IEEE Conference
on Computer Vision and Pattern Recognition, pages
2117–2125, Honolulu.
Lin, T.-Y., Maire, M., Belongie, S., Bourdev, L., Girshick,
R., Hays, J., Perona, P., Ramanan, D., Zitnick, C. L.,
and Doll
´
ar, P. (2015). Microsoft COCO: Common Ob-
jects in Context. arXiv:1405.0312 [cs].
L
´
opez-de-Ipi
˜
na, D., Lorido, T., and L
´
opez, U. (2011). In-
door Navigation and Product Recognition for Blind
People Assisted Shopping. In Bravo, J., Herv
´
as, R.,
and Villarreal, V., editors, Ambient Assisted Living,
volume 6693, pages 33–40. Springer Berlin Heidel-
berg, Berlin, Heidelberg.
Merler, M., Galleguillos, C., and Belongie, S. (2007). Rec-
ognizing Groceries in situ Using in vitro Training
Data. In 2007 IEEE Conference on Computer Vision
and Pattern Recognition, Minneapolis. IEEE.
Munjal, B., Amin, S., Tombari, F., and Galasso, F. (2019).
Query-Guided End-To-End Person Search. In 2019
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition (CVPR), pages 811–820.
Osokin, A., Sumin, D., and Lomakin, V. (2020). OS2D:
One-Stage One-Shot Object Detection by Matching
Anchor Features.
Qiao, S., Shen, W., Qiu, W., Liu, C., and Yuille, A. (2017).
ScaleNet: Guiding Object Proposal Generation in Su-
permarkets and Beyond. In 2017 IEEE International
Conference on Computer Vision (ICCV), pages 1809–
1818, Venice. IEEE.
Ranst, W. V., Smedt, F. D., Berte, J., and Goedem
´
e, T.
(2018). Fast Simultaneous People Detection and Re-
identification in a Single Shot Network. In 2018 15th
IEEE International Conference on Advanced Video
and Signal Based Surveillance (AVSS), pages 1–6.
Redmon, J. and Farhadi, A. (2016). YOLO9000: Better,
Faster, Stronger. arXiv:1612.08242 [cs].
Ren, S., He, K., Girshick, R., and Sun, J. (2015). Faster R-
CNN: Towards Real-Time Object Detection with Re-
gion Proposal Networks. In Advances in Neural In-
formation Processing Systems 28 (NIPS 2015), pages
91–99.
Srivastava, M. M. (2020). Bag of Tricks for Retail Prod-
uct Image Classification. In Campilho, A., Karray, F.,
and Wang, Z., editors, Image Analysis and Recogni-
tion, volume 12131, pages 71–82. Springer Interna-
tional Publishing, Cham.
Tonioni, A. and Di Stefano, L. (2017). Product recognition
in store shelves as a sub-graph isomorphism problem.
In Lecture Notes in Computer Science (Including Sub-
series Lecture Notes in Artificial Intelligence and Lec-
ture Notes in Bioinformatics), volume 10484 LNCS,
pages 682–693. Springer Verlag.
Tonioni, A., Serra, E., and Stefano, L. D. (2018). A
deep learning pipeline for product recognition on store
shelves. In 2018 IEEE International Conference on
Image Processing, Applications and Systems (IPAS),
pages 25–31.
Wang, W., Cui, Y., Li, G., Jiang, C., and Deng, S. (2020).
A self-attention-based destruction and construction
learning fine-grained image classification method for
retail product recognition. Neural Computing and Ap-
plications, 32(18):14613–14622.
Wang, Z., Zheng, L., Li, Y., and Wang, S. (2019). Linkage
Based Face Clustering via Graph Convolution Net-
work.
Xiao, J., Xie, Y., Tillo, T., Huang, K., Wei, Y., and Feng,
J. (2019). IAN: The Individual Aggregation Network
for Person Search. Pattern Recognition, 87:332–340.
Xiao, T., Li, S., Wang, B., Lin, L., and Wang, X. (2017).
Joint Detection and Identification Feature Learning
for Person Search. In 2017 IEEE Conference on Com-
puter Vision and Pattern Recognition (CVPR), pages
3376–3385, Honolulu, HI. IEEE.
Zhou, X., Girdhar, R., Joulin, A., Kr
¨
ahenb
¨
uhl, P., and
Misra, I. (2022). Detecting Twenty-thousand Classes
using Image-level Supervision. arXiv:2201.02605
[cs].
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
722
