
Semantic Segmentation by Semi-Supervised
Learning Using Time Series Constraint
Takahiro Mano
a
, Sota Kato
b
and Kazuhiro Hotta
c
Meijo University, 1-501 Shiogamaguchi, Tempaku-ku, Nagoya 468-8502, Japan
Keywords:
Semantic Segmentation, Semi-Supervised Learning, Pseudo Label, Time Series Constraint.
Abstract:
In this paper, we propose a method to improve the accuracy of semantic segmentation when the number of
training data is limited. When time-series information such as video is available, it is expected that images
that are close in time-series are similar to each other, and pseudo-labels can be easily assigned to those images
with high accuracy. In other words, if the pseudo-labels are assigned to the images in the order of time-series,
it is possible to efficiently collect pseudo-labels with high accuracy. As a result, the segmentation accuracy can
be improved even when the number of training images is limited. In this paper, we evaluated our method on
the CamVid dataset to confirm the effectiveness of the proposed method. We confirmed that the segmentation
accuracy of the proposed method is much improved in comparison with the baseline without pseudo-labels.
1 INTRODUCTION
Semantic segmentation is the process of assigning a
label to each pixel in an image. In general, image
recognition using deep learning requires a large num-
ber of supervised images. Semantic segmentation re-
quires pixel-level annotation in all images, and the
cost of preparing a large number of supervised im-
ages is very high. For example, it is reported that it
takes approximately 90 minutes to create one anno-
tated image in the Cityscapes dataset (Cordts et al.,
2016).
FCN (Long et al., 2015) which consists of all-
layer convolution, SegNet (Badrinarayanan et al.,
2017) and U-Net (Ronneberger et al., 2015) with
encoder-decoder structures, and Deeplabv3+ (Chen
et al., 2018) which is the extension of these meth-
ods have been proposed. But, they suffer from low
accuracy when those methods are trained with only
a small number of supervised images. Against this
background, semi-supervised learning method using a
small number of supervised and lots of unsupervised
images has attracted attention. (Papandreou et al.,
2015)
Recently, semi-supervised image segmentation
(SSIS) methods (Chen et al., 2021; Ouali et al., 2020)
has been proposed to train models with a limited num-
a
https://orcid.org/0000-0003-2077-6079
b
https://orcid.org/0000-0003-0392-6426
c
https://orcid.org/0000-0002-5675-8713
ber of labeled and unlabeled images. However, ex-
isting SSIS methods do not use a large number of
unlabeled images and fail to take advantage of unla-
beled images. The method (Chen et al., 2020) used
additional teacher signals such as pseudo-labels for
unlabeled images in order to improve the accuracy.
However, these methods are not designed for video
data and do not take into account the good property
of time-series data, such that the images at time t and
t + 1 are similar to each other. We consider that time
series constraints should be useful to improve the ac-
curacy.
In this paper, we propose to a segmentation
method from a small number of annotated images
by using time series constraints effectively. When
time-series information such as video is available, it
is expected that images which are close in time-series
are similar to each other, and pseudo-labels on those
images are expected to be highly accurate. In other
words, if pseudo-labels are assigned to the images in
the order of time-series, it is possible to efficiently
collect pseudo-labels with high accuracy. As a re-
sult, we can improve the segmentation accuracy from
a small number of training images.
We conducted experiments on the Camvid dataset.
We evaluated the accuracy when we train our method
with approximately 1/91, 1/18, and 1/9 of all anno-
tated images. Our method can use the images with
pseudo-labels in the order of time-series for training.
We confirmed the significant performance improve-
ment by the proposed method. Specifically, the pro-
708
Mano, T., Kato, S. and Hotta, K.
Semantic Segmentation by Semi-Supervised Learning Using Time Series Constraint.
DOI: 10.5220/0011721800003417
In Proceedings of the 18th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2023) - Volume 5: VISAPP, pages
708-714
ISBN: 978-989-758-634-7; ISSN: 2184-4321
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

posed method improved the mIoU by 9.33%, 5.7%,
and 3.86% respectively when we use approximately
1/91, 1/18, and 1/9 of all annotated images.
This paper is organized as follows. Section 2
presents related works. Section 3 explains the pro-
posed method. Section 4 provides an experimental
overview, and Section 5 shows the experimental re-
sults. Finally, Section 6 describes conclusions and fu-
ture works.
2 RELATED WORKS
2.1 Semi-Supervised Semantic
Segmentation
Semi-supervised learning is an intermediate method
between supervised and unsupervised learning. Semi-
supervised learning does not require annotation of all
images, so we can reduce the annotation cost. Semi-
supervised learning makes good use of unlabeled im-
ages to improve the accuracy. Specifically, it has been
attracting attention because pseudo-labels can be as-
signed to unlabeled images.
Pseudo-labeling methods (Lee et al., 2013) cre-
ated pseudo labels by assigning the most probable
class to the pixel in an unlabeled image. In semi-
supervised learning, pseudo-labeling methods (Chen
et al., 2020; Zou et al., 2020) can be used to extend
the training data using unlabeled images.
Semi-supervised semantic segmentation meth-
ods utilize Generative Adversarial Networks (GANs)
(Goodfellow et al., 2020) such as AdvSemiSeg (Hung
et al., 2018) and S4GAN (Mittal et al., 2019). They
use discriminators to distinguish the confidence maps
from predictions for labeled and unlabeled data.
Consistency-based methods include perturbations by
CutMix (French et al., 2019) and ClassMix (Olsson
et al., 2021) to the input image in order to enforce the
consistency of predictions and intermediate features.
However, these methods have the problem that
they are also not designed for video data and do not
use the good property of time-series. Our proposed
method uses time-series constraints that images at
time t and t +1 is similar. By using this constraint ef-
fectively, we can predict more accurate pseudo-labels
easily for unlabeled images in a video.
2.2 Contrastive Learning
Contrastive Learning (Hadsell et al., 2006) has suc-
cessfully improved the accuracy for semi-supervised
learning. Pixel-by-pixel learning was used in the
method (Wang et al., 2021). The pixelwise con-
trastive loss is defined as
L
NCE
i
=
1
|P
i
|
∑
i
+
∈P
i
−log
exp(i·i
+
/τ)
exp(i·i
+
/τ)+
∑
i
−
∈N
i
exp(i·i
−
/τ)
(1)
where P
i
and N
i
denote pixel embedding collections
of the positive samples and negative samples. i is
a pixel, i
+
represents positive pixel and i
−
repre-
sents negative pixel. Positive and negative pixels are
learned contrastively not only in the same image but
also in two images. The · means the dot product. We
set the temperature τ to 0.1.
It is reported that contrastive learning improves
the accuracy by learning rich semantic relationships
between pixels across different images. In this pa-
per, we also use contrastive learning between pix-
els to predict pseudo-labels with high accuracy be-
cause the model can learn semantic relationships be-
tween pixels across different images. In this study, af-
ter shuffling the annotated images and unlabeled im-
ages with pseudo-labels, pixel-wise contrast learning
is performed between images in a mini-batch. In ex-
periments, our method is trained by using both cross
entropy loss and pixel-wise contrastive loss.
3 PROPOSED METHOD
In this section, We explain the details of the pro-
posed method. section 3.1 describes how to create
and learn pseudo-labels using time-series constraints
in only one scene. Section 3.2 describes how to learn
and create pseudo-labels in each scene. Section 3.3
explains the threshold when we predict pseudo-labels
of unlabeled images in a video. Section 3.4 describes
the loss function used in our method.
3.1 Semi-Supervised Learning with
Time-Series Constraints
In the proposed method, the model is trained on some
annotated images in the middle of a scene as shown
in Figure 1. This is because we would like to use the
time-series constraints effectively. In top row of Fig-
ure 1, five annotated images are used for training the
model. The trained model is applied to two unlabeled
images that are the closest in time-series to the anno-
tated images because images that are chronologically
adjacent to the annotated images are expected to be
similar to the annotated images. Thus, we can assign
highly accurate pseudo-labels to two images.
As shown in the bottom part of Figure 1, train-
Semantic Segmentation by Semi-Supervised Learning Using Time Series Constraint
709

Figure 1: Creating pseudo labels using time-series constraints.
Figure 2: Scene-wise learning and prediction of pseudo labels.
ing is performed again by using the original annotated
images and two pseudo-labeled images. The model
is also applied to two unlabeled images that are the
chronologically closest among the images that have
not yet been assigned pseudo-labels. Then we assign
pseudo-labels to two images. By repeating this pro-
cess in the order of time-series, the accuracy of the
proposed method is gradually improved.
3.2 Scene-Wise Learning and Pseudo
Label Prediction
In general, in-vehicle video dataset such as CamVid
dataset consists of some scenes. If we train a model
using annotated images and pseudo-labeled images in
all scenes simultaneously, we may not use time-series
constraint effectively because the model is not spe-
cialized to one scene. Therefore, in this paper, we
propose to learn and predict pseudo-labels for each
scene as shown in Figure 2.
At first, the proposed method is trained using
some annotated images in all scenes. In the Fig-
ure 2, there are four scenes.
1
⃝
Next, we select one
scene and the model is fine-tuning to the scene.
2
⃝
Then, we predict the pseudo-labels of two images
that are chronologically adjacent to the annotated im-
ages in the selected scene.
3
⃝
We pick up the differ-
ent one scene from the first scene, and fine-tuning is
performed.
4
⃝
We also perform the pseudo-label as-
signment. By fine-tuning the model for each scene,
we can use time-series constraint effectively and the
model can predict highly accurate pseudo-labels.
This process is continued for all scenes in the
numbered order shown in Figure 2, and while increas-
ing the number of pseudo-labeled images. Finally,
the model is trained on the annotated images and all
pseudo-labeled images obtained at the upper process.
3.3 Threshold
As described in previous section, pseudo-labels are
assigned to unlabeled images using the time-series
constraint. But, of course, all predictions are not cor-
rect. Thus, a threshold is needed to determine whether
we should assign pseudo-label to each pixel based on
the confidence through softmax function.
If the threshold is high, only the pixels that the
model classifies with high confidence are assigned to
pseudo-labels. However, if the threshold is too high,
only a smaller number of pixels in an image can be
pseudo-labeled.
On the other hand, if the threshold is low, we
must assign pseudo-labels to the pixels with low con-
fidence. But we can increase the number of pixels
for training. Therefore, the setting of threshold is im-
portant for both accurate pseudo-labels and the num-
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
710

ber of pixels for training. In this paper, we tried two
threshold values; a fixed value and an Average Pre-
dicted Value(APV) for each class.
Fixed Value
In general, a fixed value is used as threshold. This
means that only pixels whose confidence exceeds the
fixed threshold are assigned pseudo-labels. In this pa-
per, the threshold for each class was empirically set.
Average Predicted Value
We propose a threshold value called Average Pre-
dicted Value (APV). When fixed values are used, it
is difficult to assign pseudo-labels to pixels with low
confidence, such as the rare class. To compensate for
this, we use the average confidence of outputs of each
class in an image as the threshold value. This allows
approximately half number of pixels classified in each
class to be assigned pseudo-labels. Since the distribu-
tion of the confidence levels varies for each image,
we can change the threshold automatically for each
image.
3.4 Loss
In this study, the model is trained with the follow-
ing losses by using both annotated images and images
with pseudo-labels. The loss for the proposed method
can be formulated as follows.
L = L
ce
+ λL
NCE
i
(2)
where L
ce
is cross entropy loss. L
NCE
i
is pixel wise
contrastive loss showin in equation (1). λ is a hyper-
parameter and is empirically set to 0.1.
4 EXPERIMENTAL SETTINGS
In this section, we explain the experimental settings.
The dataset and training method are described in Sec-
tion 4.1. Experimental conditions are described in
Section 4.2. We explain the baseline method in Sec-
tion 4.3.
4.1 Data Sets and Training Methods
The CamVid dataset (Brostow et al., 2009) used in the
following experiment includes the images of 360 x
480 pixels and 11 classes. CamVid dataset consists of
367 training images, 101 validation images, and 233
test images. The original 367 training images con-
sisted of 5 scenes, but the fifth scene was not used
because the number of images in the scene was too
small to increase the number of pseudo-labeled im-
ages sufficiently. Therefore, experiments were con-
ducted using the remaining four scenes. In this paper,
we used 1, 5, and 10 images from each of the four
scenes for training as annotated images. Remaining
images were used as the unlabeled images for pseudo
labels. The 1, 5, and 10 annotated images were the
center images in the order of each time-series scene.
We evaluate whether the proposed method im-
proves the test mIoU. The training images, including
the pseudo-labeled images, were randomly flipped
left and right as data augmentation.
4.2 Network and Parameter
We used Deeplabv3+ with Resnet101 pre-trained on
Imagenet dataset. The batchsize was set to 4, and
SGD (Momentum=0.9, weight
d
= 1×10
−4
) was used
as the optimization method.
At first, the model is trained on the annotated
images in four scenes for 200 iterations. Next, the
trained model is fine-tuned to the specific scene for
200 iterations. The fine-tuned model is applied to
two unlabeled images in the scene that are chrono-
logically adjacent to the annotated images, and the
pseudo-labels are assigned to the unlabeled images by
using threshold. After we assign pseudo-labels to two
unlabeled images in all scenes, the model is trained
again using the images in all scenes for 200 iterations.
The images with pseudo-labels are used for training
in the next epoch. The process up to this point is de-
fined as 1 epoch. In the second epoch, the model is
trained for 200 iterations using the annotated images
and pseudo-labeled images. This is repeated until all
unlabeled images in scenes are used.
The initial learning rate was set to 0.001 for the
backbone network parameters and 0.01 for the classi-
fier parameters. Then, the learning rate was changed
using the following equation. The learning rate was
attenuated from the initial value at each iteration us-
ing Equation (3).
lr = lr
base
× (1 − iteration/200)
0.9
(3)
We used both cross entropy loss and pixelwise con-
trastive loss as the loss function. Mean IoU (mIoU) is
used as evaluation measure.
4.3 Baseline Method
The baseline method is to train the same model as
the proposed method with the same annotated images
obtained from four scenes. The best model with the
highest mIoU on validation set in 200 iterations is se-
lected as the baseline model. In this experiment, the
Semantic Segmentation by Semi-Supervised Learning Using Time Series Constraint
711

Table 1: Comparison of the proposed method and baseline on Camvid test dataset.
4/367 20/367 40/367
class baseline ours baseline ours baseline ours
sky 85.73 89.75 (+4.02) 89.57 89.76 (+0.19) 90.18 90.62 (+0.44)
building 67.91 73.10 (+5.19) 72.42 73.84 (+1.42) 74.33 75.15 (+0.82)
pole 4.08 12.67 (+8.59) 13.37 14.45 (+1.08) 14.23 16.65 (+2.42)
road 71.91 78.88 (+6.97) 78.53 87.67 (+9.14) 84.27 91.49 (+7.22)
sidewalk 16.15 39.60 (+23.45) 35.52 61.77 (+26.25) 53.67 73.71 (+20.04)
tree 55.17 67.38 (+12.21) 63.44 65.71 (+2.27) 65.55 67.67 (+2.12)
signal 1.11 14.35 (+13.24) 13.57 13.00 (-0.57) 31.35 30.56 (-0.79)
fence 0.00 0.16 (+0.16) 1.69 5.59 (+3.9) 8.95 13.66 (+4.71)
car 48.30 60.22 (+11.92) 62.31 73.17 (+10.86) 70.58 75.90 (+5.32)
pedestrian 3.10 19.94 (+16.84) 24.15 32.78 (+8.63) 36.56 42.14 (+5.58)
bicyclist 0.00 0.00 (+0.00) 0.01 0.00 (-0.01) 7.74 2.29 (-5.45)
mIoU 32.13 41.46 (+9.33) 41.33 47.07 (+5.74) 48.86 52.71 (+3.85)
effectiveness of the proposed method is demonstrated
by comparing the test mIoU of the baseline method
with the test mIoU of the proposed method when the
number of pseudo-labeled images is increased.
5 EXPERIMENTAL RESULTS
We conducted an experiment to evaluate semi-
supervised semantic segmentation on the CamVid
dataset. Section 5.1 shows the accuracy and quali-
tative comparison of the baseline and the proposed
method. Section 5.2 shows the results of ablation
studies.
5.1 Comparison of the Proposed
Method with Baseline
Table 1 shows the IoU of each class and mIoU by
baseline and the proposed method. The column of
baseline shows the IoU of each class by baseline. The
column of ours show the IoU and improvement com-
pared with baseline. 4/367, 20/367, and 40/367 indi-
cate the number of annotated images actually used for
training. For example, 4/367 means that we use only
one annotated image in one of four scenes. 20/367
means that we use 5 annotated images in each scene.
By using the proposed method, we were able to
significantly improve the mIoU compared to the base-
line. When we used only one annotated image in each
scene, the mIoU was improved 9.33%. The mIoU of
our method at this setting was better than the mIoU
of baseline at the setting that 5 annotated images per
scene are used for training. The IoUs of sidewalk,
tree, signal, and car are particularly improved. The
classification of Pedestrian and Bicyclist is difficult
because both Pedestrian and Bicyclist are very small
and similar. In experiments, many Bicyclist was mis-
classified as Pedestrian. Thus, Bicyclist class had low
accuracy and Pedestrian class was much improved.
Although our method improved the accuracy in
all settings, the accuracy was significantly improved
with fewer annotated images. Since the goal of semi-
supervised learning is to learn with as fewer super-
vision as possible, the effectiveness of our proposed
method is demonstrated.
Figure 3 shows the qualitative segmentation re-
sults of the baseline and the proposed method when
we used 40 annotated images. Our proposed method
generates more accurate segmentation results than the
baseline. We see that sidewalks are predicted more
accurately using the proposed method than baselines.
In addition, there are many parts of the baseline
where the pedestrian is not predicted, but the pro-
posed method is able to predict the pedestrian more
accurately. These results demonstrated the effective-
ness of the proposed method.
5.2 Ablation Studies
Table 2: Ablation study on the loss function. We show the
improvement from baseline in test mIoU by the proposed
method when we used 20 annotated images.
L
ce
L
NCE
i
mIoU
✓ +2.27
✓ ✓ +5.74
Table 3: Comparison of threshold when we used 20 anno-
tated images.
threshold 0.2 0.4 0.6 0.8 APV
mIoU 43.25 43.33 43.99 44.77 47.07
Table 2 shows ablation study about the loss functions.
Table shows the improvement from baseline in test
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
712
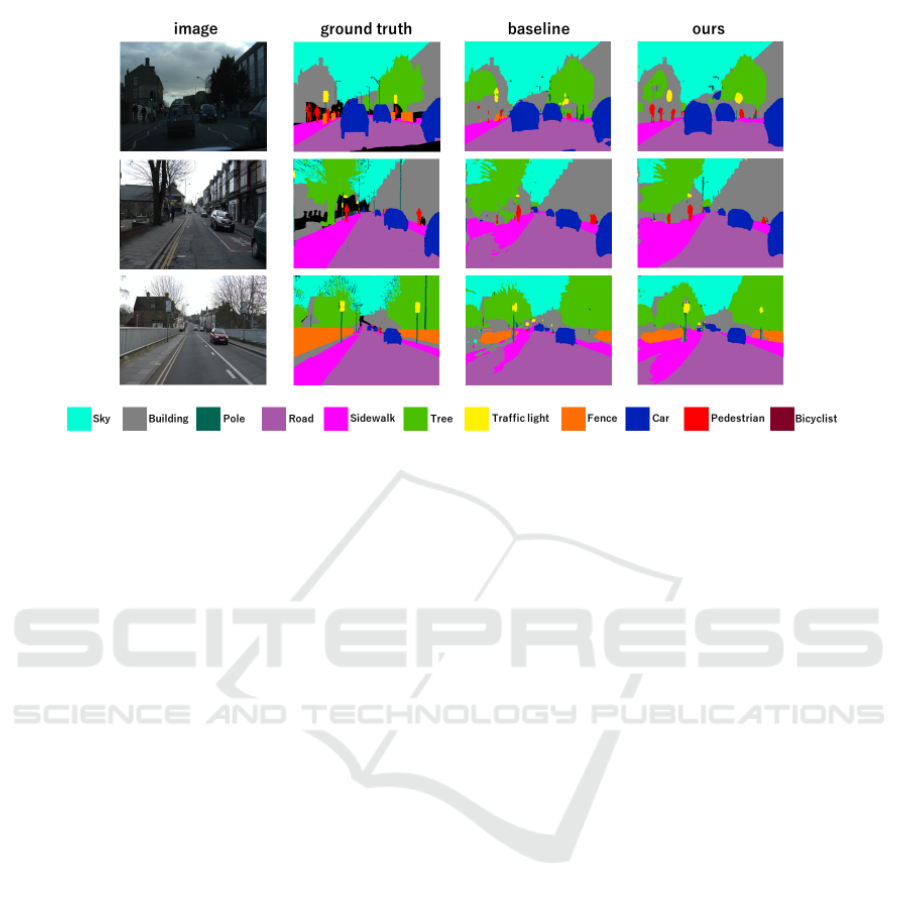
Figure 3: Comparison of qualitative results by the baseline and the proposed method when we used 40 labeled images for
training.
mIoU by the proposed method when we used 20 an-
notated images in four scenes. We see that contra-
sitive loss improved the accuracy significantly.
Table 3 shows a comparison of the threshold when
we use 20 annotated images. We see that the mIoU
increases significantly when the Average Predicted
Value(APV) of each class is used as the threshold
value. If a fixed value is used for the threshold value,
the accuracy is biased toward the classes with large
training samples, because the classes with small train-
ing samples have a smaller probability than classes
with large training samples. However, by using aver-
age predict value as the threshold value, we can use
different threshold value for each class, and this im-
proved the accuracy.
6 CONCLUSIONS
We proposed a semi-supervised semantic segmenta-
tion method that assigns pseudo-labels in chronolog-
ical order and trains the model using those images
step by step. We confirmed that our proposed method
much improved test mIoU on the Camvid dataset in
comparison with the baseline model.
Our proposed method used only the network’s
output to assign pseudo-labels. However, prior proba-
bility, which is calculated from past images in a time-
series manner, may improve the accuracy of pseudo-
labels. The usage of prior probability is one of the
subject for future works.
ACKNOWLEDGEMENTS
This work is supported by JSPS KAKENHI Grant
Number 21K11971.
REFERENCES
Badrinarayanan, V., Kendall, A., and Cipolla, R. (2017).
Segnet: A deep convolutional encoder-decoder ar-
chitecture for image segmentation. IEEE transac-
tions on pattern analysis and machine intelligence,
39(12):2481–2495.
Brostow, G. J., Fauqueur, J., and Cipolla, R. (2009). Seman-
tic object classes in video: A high-definition ground
truth database. Pattern Recognition Letters, 30(2):88–
97.
Chen, L.-C., Lopes, R. G., Cheng, B., Collins, M. D.,
Cubuk, E. D., Zoph, B., Adam, H., and Shlens, J.
(2020). Naive-student: Leveraging semi-supervised
learning in video sequences for urban scene segmen-
tation. In European Conference on Computer Vision,
pages 695–714. Springer.
Chen, L.-C., Zhu, Y., Papandreou, G., Schroff, F., and
Adam, H. (2018). Encoder-decoder with atrous sepa-
rable convolution for semantic image segmentation. In
Proceedings of the European conference on computer
vision (ECCV), pages 801–818.
Chen, X., Yuan, Y., Zeng, G., and Wang, J. (2021). Semi-
supervised semantic segmentation with cross pseudo
supervision. In Proceedings of the IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition,
pages 2613–2622.
Semantic Segmentation by Semi-Supervised Learning Using Time Series Constraint
713

Cordts, M., Omran, M., Ramos, S., Rehfeld, T., Enzweiler,
M., Benenson, R., Franke, U., Roth, S., and Schiele,
B. (2016). The cityscapes dataset for semantic urban
scene understanding. In Proceedings of the IEEE con-
ference on computer vision and pattern recognition,
pages 3213–3223.
French, G., Laine, S., Aila, T., Mackiewicz, M., and Fin-
layson, G. (2019). Semi-supervised semantic seg-
mentation needs strong, varied perturbations. arXiv
preprint arXiv:1906.01916.
Goodfellow, I., Pouget-Abadie, J., Mirza, M., Xu, B.,
Warde-Farley, D., Ozair, S., Courville, A., and Ben-
gio, Y. (2020). Generative adversarial networks. Com-
munications of the ACM, 63(11):139–144.
Hadsell, R., Chopra, S., and LeCun, Y. (2006). Dimen-
sionality reduction by learning an invariant mapping.
In 2006 IEEE Computer Society Conference on Com-
puter Vision and Pattern Recognition (CVPR’06), vol-
ume 2, pages 1735–1742. IEEE.
Hung, W.-C., Tsai, Y.-H., Liou, Y.-T., Lin, Y.-Y., and
Yang, M.-H. (2018). Adversarial learning for semi-
supervised semantic segmentation. arXiv preprint
arXiv:1802.07934.
Lee, D.-H. et al. (2013). Pseudo-label: The simple and effi-
cient semi-supervised learning method for deep neural
networks. In Workshop on challenges in representa-
tion learning, ICML, volume 3, page 896.
Long, J., Shelhamer, E., and Darrell, T. (2015). Fully con-
volutional networks for semantic segmentation. In
Proceedings of the IEEE conference on computer vi-
sion and pattern recognition, pages 3431–3440.
Mittal, S., Tatarchenko, M., and Brox, T. (2019). Semi-
supervised semantic segmentation with high-and low-
level consistency. IEEE transactions on pattern anal-
ysis and machine intelligence, 43(4):1369–1379.
Olsson, V., Tranheden, W., Pinto, J., and Svensson, L.
(2021). Classmix: Segmentation-based data augmen-
tation for semi-supervised learning. In Proceedings of
the IEEE/CVF Winter Conference on Applications of
Computer Vision, pages 1369–1378.
Ouali, Y., Hudelot, C., and Tami, M. (2020). Semi-
supervised semantic segmentation with cross-
consistency training. In Proceedings of the
IEEE/CVF Conference on Computer Vision and
Pattern Recognition, pages 12674–12684.
Papandreou, G., Chen, L.-C., Murphy, K. P., and Yuille,
A. L. (2015). Weakly-and semi-supervised learning of
a deep convolutional network for semantic image seg-
mentation. In Proceedings of the IEEE international
conference on computer vision, pages 1742–1750.
Ronneberger, O., Fischer, P., and Brox, T. (2015). U-net:
Convolutional networks for biomedical image seg-
mentation. In International Conference on Medical
image computing and computer-assisted intervention,
pages 234–241. Springer.
Wang, W., Zhou, T., Yu, F., Dai, J., Konukoglu, E., and
Van Gool, L. (2021). Exploring cross-image pixel
contrast for semantic segmentation. In Proceedings of
the IEEE/CVF International Conference on Computer
Vision, pages 7303–7313.
Zou, Y., Zhang, Z., Zhang, H., Li, C.-L., Bian, X., Huang,
J.-B., and Pfister, T. (2020). Pseudoseg: Design-
ing pseudo labels for semantic segmentation. arXiv
preprint arXiv:2010.09713.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
714
