
Shuffle Mixing: An Efficient Alternative to Self Attention
Ryouichi Furukawa
a
and Kazuhiro Hotta
b
Meijo University, 1-501 Shiogamaguchi, Tempaku-ku, Nagoya 468-8502, Japan
Keywords:
Transformer, Self Attention, Depth Wise Convolution, Shift Operation.
Abstract:
In this paper, we propose ShuffleFormer, which replaces Transformer’s Self Attention with the proposed shuf-
fle mixing. ShuffleFormer can be flexibly incorporated as the backbone of conventional visual recognition,
precise prediction, etc. Self Attention can learn globally and dynamically, while shuffle mixing employs Depth
Wise Convolution to learn locally and statically. Depth Wise Convolution does not consider the relationship
between channels because convolution is applied to each channel individually. Therefore, shuffle mixing can
obtain the information on different channels without changing the computational cost by inserting a shift op-
eration in the spatial direction of the channel direction components. However, by using the shift operation, the
amount of spatial components obtained is less than that of Depth Wise Convolution. ShuffleFormer uses over-
lapped patch embedding with a kernel larger than the stride width to reduce the resolution, thereby eliminating
the disadvantages of using the shift operation by extracting more features in the spatial direction. We evaluated
ShuffleFormer on ImageNet-1K image classification and ADE20K semantic segmentation. ShuffleFormer has
superior results compared to Swin Transformer. In particular, ShuffleFormer-Base/Light outperforms Swin-
Base in accuracy at about two-thirds of the computational cost.
1 INTRODUCTION
In computer vision, network design plays an impor-
tant role in improving performance. The recently de-
veloped Vision Transformer(ViT) (Sharir et al., 2021)
has the potential to surpass convolution, which has
dominated the field since the AlexNet (Krizhevsky
et al., 2017). The superiority of ViT was first
demonstrated in image classification tasks, and ViT
is rapidly spreading to many other tasks such as
semantic segmentation (Strudel et al., 2021), ob-
ject detection (Chi et al., 2020), and action recog-
nition (Arnab et al., 2021). ViT consists of Posi-
tional Embedding and multiple Transformer Encoders
which are composed of Normalization, Self Attention
(Vaswani et al., 2017), and FFN. The superiority of
ViT over convolution has been attributed to Self At-
tention which can model spatial relationships dynami-
cally and globally. Specifically, Self Attention extract
features from arbitrary locations using weights calcu-
lated by using inner products. Self Attention has two
advantages compared to convolution. First, the en-
tire image is treated as input, so local constraints in
convolution can be ignored. Second, the weights are
dynamically generated by input features, rather than
fixed weights generated by training as in convolution.
a
https://orcid.org/0000-0002-8723-7742
b
https://orcid.org/0000-0002-5675-8713
However, can the advantages be considered a fac-
tor in ViT’s success? Local attention mechanism is
introduced to ViTs to restrict their attention scope
within a small local region, e.g., Swin Transformer
(Liu et al., 2021b) and Local ViT (Li et al., 2021). The
results indicate that local restrictions do not degrade
performance. MLP-Mixer (Tolstikhin et al., 2021)
substitutes Self Attention for a linear projection layer
used in spatial direction and achieves top performance
on ImageNet-1K (Russakovsky et al., 2015). More
surprisingly, MetaFormer (Yu et al., 2022), which re-
placed Self Attention with a simple pooling mech-
anism, also performed very well. These results in-
dicate that dynamic weight generation is not neces-
sarily important. Therefore, the success of ViT may
not be due to Self Attention, which was previously
considered to be important, but to the other network
structures and learning methods. In addition, Self At-
tention has the following problems, which have been
discussed in many conventional types of pieces of
research (Katharopoulos et al., 2020). The compu-
tational cost of Self Attention is proportional to the
square of the number of patches in the input image.
This causes significant computational cost problems
for most tasks in computer vision that deal with two-
dimensional information.
We considered that an important approach to cre-
ate a superior model to ViT from these perspectives
700
Furukawa, R. and Hotta, K.
Shuffle Mixing: An Efficient Alternative to Self Attention.
DOI: 10.5220/0011720200003417
In Proceedings of the 18th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2023) - Volume 5: VISAPP, pages
700-707
ISBN: 978-989-758-634-7; ISSN: 2184-4321
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
would be to replace self-attention with methods that
are computationally less expensive and to improve
methods such as FFN, Patch Embedding, and Nor-
malization. In this paper, we focus on Depth Wise
convolution (DWconv) (Howard et al., 2017) and shift
operations (Wang et al., 2022) to create a more ef-
ficient (low computational cost and high accuracy)
method than Self Attention. The block of our pro-
posed method consists of Token Mixer for spatial
modeling and FFN for channel modeling, similar to
the Transformer structure handled in computer vi-
sion. In the proposed method, Token Mixer is re-
placed with the proposed shuffle mixing, and FFN is
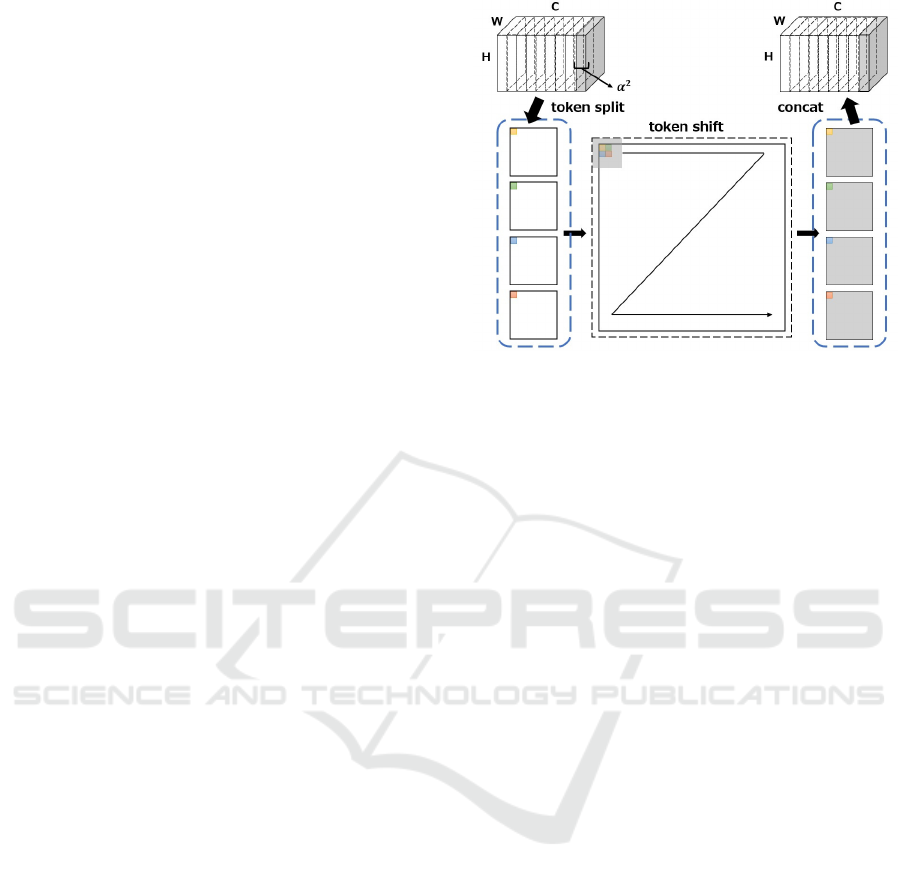
retained. First, the proposed shuffle mixing as shown
in Figure 1 shifts the features in the channel direc-
tion to neighboring spatial neighborhoods on the same
coordinates. Next, DWconv with an increased num-
ber of output channels can be used to extract nearby
channels and spatial direction components without in-
creasing computational cost. Shuffle mixing limits
the ability to model in the spatial direction by using
shift to allow reference to components in the channel
direction. Therefore, the ability to acquire spatial in-
formation is compensated for by increasing the size of
the kernel of patch embedding, which performs reso-
lution reduction.
The proposed ShuffleFormer using these blocks
and patch embedding achieved the same or better ac-
curacy than Swin Transformer. Specifically, on the
ImageNet-1k dataset with the same computational
complexity as Swin-B, our ShuffleFormer achieved
an accuracy improvement of 0.62%. Furthermore, in
comparison with Swin-B/Light, our model achieved
the same accuracy while reducing the computational
cost by two-thirds. Our method also achieved a 0.5%
mIoU improvement in semantic segmentation on the
ADE20K dataset (Zhou et al., 2019), which has the
same computational complexity as Swin-B.
This paper is organized as follows. Section 2 de-
scribes the related works. The detail of the proposed
method is presented in section 3. Section 4 shows the
experimental results. Finally, section 5 provides con-
clusions and future work.
2 RELATED WORKS
Transformer (Vaswani et al., 2017) is a model de-
veloped in natural language processing(NLP). RNN
(Mikolov et al., 2010) conventionally used in NLP
has the problem of not being able to parallelize the
computation because the hidden state obtained from
the previous time is used as input for processing at
the next time. CNN does not need to input the infor-
Figure 1: Overview of shuffle mixing.
mation obtained from the previous time as RNN, so
the computation can be parallelized. However, CNN
(LeCun et al., 1989) has the problem that it is diffi-
cult to capture distant information. Transformer has
achieved great success in NLP because it can paral-
lelize computations unlike existing RNNs and CNNs
while capturing the relationship between distant in-
formation.
ViT (Sharir et al., 2021) is a typical model that uti-
lizes the Transformer for computer vision. ViT solved
the local constraints of CNNs, which have been a
problem in computer vision as well, by dividing the
image into patches and inputting them to the Trans-
former. In addition, ViT allows the weights to be han-
dled dynamically. Following the success of ViT, many
studies using Transformer have been conducted in
computer vision. CoAtNet (Dai et al., 2021) and CmT
(Guo et al., 2022) improve the performance by mixing
convolution and Self Attention, while CvT (Wu et al.,
2021) improves the performance by introducing con-
volution in the Self Attention embedding layer. PVT
(Wang et al., 2021) includes downsampling in ViT,
making it easier to apply ViT to other tasks except
for image classification. There is no improvement in
Transformer’s Self Attention in these methods, which
still guarantees the success of the vanilla Transformer
in computer vision.
However, is it really possible to say that Self At-
tention has led to Transformer’s success? Self Atten-
tion has the disadvantage that the computational cost
is the square of the size of the input token. Swin
Transformer achieved better performance than ViT
while reducing computational cost by restricting im-
ages to local regions called windows and inputting
each window to Self Attention. MLP-Mixer (Tol-
stikhin et al., 2021) used token-mixing MLP, which
learns all spatial information by linear projection
Shuffle Mixing: An Efficient Alternative to Self Attention
701

Figure 2: Left: Overview of Shuffleformer, Right: Overview of shuffle block
layer, instead of Self Attention. However, it lacks the
property of dynamically handling weights. In subse-
quent studies, spatial gating units (Liu et al., 2021a)
and cyclic connections (Chen et al., 2021) have been
used similarly with high success using MLP in the
spatial direction. These studies suggest that the global
feature extraction and dynamic weighting properties
of Self Attention do not necessarily lead to the suc-
cess of Transformer in computer vision. The fact that
PoolFormer (Yu et al., 2022), which replaces Self At-
tention with a simple average pooling layer, works as
well as the latest Networks, increases the possibility
that the consideration is correct.
In these research trends, our model is similar to
PoolFormer in that it replaces Self Attention with a
method that has local and static weights. To create
an efficient model, Self Attention is replaced by a
method using DWconv and shift operations. The pro-
posed method can extract features by DWconv more
effectively than average pooling, and refer to infor-
mation from different channels by using shift with-
out changing the computational cost. We demonstrate
the usefulness of the proposed method by comparing
the Self Attention-based method and vanilla DWconv
through experiments.
3 PROPOSED METHOD
3.1 Network Architecture
For comparison with networks using Self Attention,
ShuffleFormer takes on the structure shown in Figure
2. For hierarchical feature extraction such as PVT,
overlapped patch embedding is used for resolution re-
duction. Patch embedding used in Swin Transformer
is implemented using convolution with equal kernel
size and stride. In overlapped patch embedding, the
kernel size is made larger than the stride width to gen-
erate patches with more spatial information. Shuffle-
Former consists of four stages. The i-th stage consists
of an overlapped patch embedding layer and multi-
ple shuffle blocks. In actuality, we use a convolution
layer with a kernel size of 7 × 7 and stride of 4 ×
4, and output as an arbitrary number of channels C
(output features are H/4 × W/4 × C). Unlike con-
ventional methods, this method takes duplicates into
account, and thus generates better patches for a larger
computational cost.
Next, the generated patches are used as input to
the shuffle block for feature extraction. The same
structure is used in stages 2, 3, and 4 for feature ex-
traction. The number of channels is doubled by using
a convolution layer with a kernel size of 3 × 3 and
a stride of 2 for the Patch embedding layer of each
stage. That is, the output resolutions of stages 2, 3,
and 4 are H/8 × W /8,H/16 × H/16, and H/32 ×
W /32, and the corresponding channel numbers are
2C, 4C, and 8C, respectively. Since the network
outputs features of different resolutions at different
stages, it can be used for tasks such as segmenta-
tion and object detection as well as conventional CNN
methods.
3.2 Shuffle Block
3.2.1 Composition of Block
The shuffle block takes features from the patch em-
bedding layer as input. As shown in Figure 2, the
shuffle block consists of shuffle mixing, FFN, nor-
malization, and residual connection. FFN consists of
two linear transformation layers and a GELU func-
tion. Layer Norm (LN) is used for Normalization.
Therefore, a shuffle block is defined as follows.
x
′
= x + shufflemixing(LN(x))
y = x
′
+ FFN(LN(x
′
))
where x ∈ R
h×w×c
, h, w is the height and width of in-
put feature, and c is the number of dimensions.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
702

Table 1: Model Configuration. Block Num indicates the number of blocks in each Stage of Shuffleformer. Embedded
Dimension indicates the number of channels in each Stage. /Light model has the same configuration as the Swin Transformer
model being compared, while the model without /Light has a modified Block Num configuration to keep Pram and FLOP
comparable to the Swin Transformer.
Model Size Block Num Embedded Dimension MLP Ratio Param(M) FLOPs(G)
Minute {2, 2, 6, 2} {64, 128, 320, 512} {4, 4, 4, 4} 12.0 1.85
Tiny/Light {2, 2, 6, 2} {96, 192, 382, 764} {4, 4, 4, 4} 21.7 3.26
Tiny {3, 4, 8, 3} {96, 192, 382, 764} {4, 4, 4, 4} 29.5 4.67
Small/Light {2, 2, 18, 2} {96, 192, 382, 764} {4, 4, 4, 4} 36.0 6.06
Small {4, 8, 20, 4} {96, 192, 382, 764} {4, 4, 4, 4} 49.8 8.9
Base/Light {2, 2, 18, 2} {128, 256, 512, 1024} {4, 4, 4, 4} 63.5 10.7
Base {4, 8, 20, 4} {128, 256, 512, 1024} {4, 4, 4, 4} 88.0 15.7
3.2.2 Shuffle Mixing
Shuffle mixing is the replacement of Self Attention
in Transformer, and shuffle mixing should be a low-
cost feature extractor which is the purpose of this pa-
per. Shuffle mixing consists of shift operation and
DWconv. DWconv is known as a very lightweight
feature extraction method because one channel corre-
sponds to one filter. However, DWconv makes it im-
possible to refer the features between different chan-
nels. Grouped Convolution can refer different chan-
nels, but the parameters and FLOPs increase by the
number of groups. Shuffle mixing enables to refer
the features in different channels without increasing
parameters or FLOPs by performing DWconv after
shifting features in the channel direction in the spa-
tial direction. Specifically, as shown in Figure 1, the
feature map is segmented by a constant Group α
2
and
then the pixels of each channel are shifted to the same
coordinates. Therefore, the generated features have
different channels in the spatial direction, but the res-
olution is multiplied by α. Perform the DWconv with
kernel size k × k and stride α × α on the feature af-
ter shift operation. To make the final output equal to
the input features, DWconv outputs α × α channels
per channel. However, shuffle mixing has a smaller
reference range in the spatial direction than regular
DWConv. Therefore, the overlapped patch embed-
ding shown in section 3.1 is supplemented with refer-
ences in the spatial direction by using a kernel larger
than the conventional method. The larger the value
of α, the larger the kernel size should be so that both
the channel and spatial direction components can be
referenced after shifting. In this paper, the value of
α was set to 2 and a kernel size k of 5 was used to
reduce computational cost.
3.3 Model Configuration
To make a fair comparison with conventional meth-
ods, we constructed several models with a different
number of parameters and computational complexity
as shown in Table 1. Specifically, among the mod-
els, Shuffle-M(inute) corresponds to MetaFormer-
S12 (Yu et al., 2022). The other models Shuffle-
T(iny), S(mall), and B(ase) correspond to Swin-T, S,
and B (Liu et al., 2021b), respectively.
Models with /Light have the same number of lay-
ers and channels as Swin, and models without /Light
have the same parameters and FLOPs as Swin, but
with more layers. For the models handled in this
paper, the MLP channel expansion ratio is set to
4. Additionally, we set the stochastic depth (Huang
et al., 2016) rate as 0.1/0.1/0.3/0.4 respectively for our
ShuffleFormer-M/T/S/B.
4 EXPERIMENTS
We conduct experiments on ImageNet-1K (Rus-
sakovsky et al., 2015) image classification and
ADE20K (Zhou et al., 2019) semantic segmenta-
tion. In the following, we first compare the pro-
posed Shuffleformer architecture with the conven-
tional method. Then, an ablation study was performed
with ImageNet-1K.
4.1 Classification on ImageNet-1K
4.1.1 Experimental Setting
We evaluated the performance of ShuffleFormer on
ImageNet-1K, which consists of 1.28M training im-
ages with 1000 classes and 50K validation images.
To validate the effectiveness of ShuffleFormer and to
fairly compare it with conventional methods, the fol-
lowing settings were used. We experimented with two
nvidia A6000 GPUs. The batch size per GPU was set
to 128 for all methods, and we trained all methods for
300 Epochs. The optimization method was AdamW
(Loshchilov and Hutter, 2017) with a weight decay
of 0.05 and a momentum of 0.9. The cosine decay
Shuffle Mixing: An Efficient Alternative to Self Attention
703
Table 2: Experimental results on ImageNet-1K and ADE20K datassets. In experiments on ImageNet-1K, our method is
compared to ResNet (He et al., 2016), RegNet (Radosavovic et al., 2020), and Swin Transformer. For ADE20K, we used
Semantic FPN (Kirillov et al., 2019) with pre-trained model on ImageNet-1K as the backbone.
ImageNet-1K ADE20k
Model Param(M) FLOPs(G) Top-1 Semantic FPN
Acc.(%) mIoU(%)
ResNet-50 26 4.1 76.93 36.5
RegNet-4G 21 4.0 79.82 39.6
Swin-T 29 4.5 80.91 40.6
Shuffle-T/L 22 3.3 79.94 39.7
Shuffle-T 30 4.7 81.41 40.9
RegNet-8G 39 8.0 81.49 40.9
Swin-S 50 8.7 81.99 42.9
Shuffle-S/L 36 6.1 81.98 42.6
Shuffle-S 50 8.9 82.44 43.3
RegNet-16G 84 16.0 82.03 42.7
Swin-B 88 15.4 82.20 43.2
Shuffle-B/L 64 10.7 82.24 43.5
Shuffle-B 88 15.7 82.82 43.8
learning rate scheduler (Loshchilov and Hutter, 2016)
and 5 epochs of a linear warm-up are used. The ini-
tial learning rate was 1e
−6
, warming up to 3.75e
−4
and finally down to 1e
−5
. Data Augmentation was
applied using Rang Augment (Cubuk et al., 2020),
Mixup (Zhang et al., 2017), Cutmix (Yun et al., 2019),
CutOut (Zhong et al., 2020), and all parameters were
set the same as in the DeiT (Touvron et al., 2021) ex-
periment.
4.1.2 Results
Table 2 compares the classification accuracy, compu-
tational cost (FLOPs), and parameters for each net-
work on the ImageNet-1K validation images. The
best accuracy is written in red ink in the table. Com-
paring the accuracy of Shuffleformer-{T, S, B} with
conventional methods with similar computational pa-
rameters and costs, the proposed method outper-
forms them for all model sizes. In addition, the
shuffleformer-{S/Light, B/Light} achieved the same
accuracy despite lower parameters and cost than Swin
Transformer. From this result, it can be considered
that the combination of patch embedding, which in-
creases the kernel size of ShuffleFormer, and shuffle
mixing, which can efficiently extract different channel
components, is effective for efficient model construc-
tion.
4.2 Semantic Segmentation on ADE20K
4.2.1 Experimental Setting
To show the effectiveness of our method for seman-
tic segmentation, we evaluated our method on the
ADE20k dataset which consists of 20K training im-
ages with 150 classes and 2K validation images Our
codes are based on mmseg. We adopt the popular Se-
mantic FPN as the basic framework. For a fair com-
parison, we evaluated with Semantic FPN (Kirillov
et al., 2019) using cosine scheduling with 80k itera-
tions, similar to the PVT (Wang et al., 2021) setting.
4.2.2 Results
Table 2 shows the results of various models
pre-trained on ImageNet-1K as the backbone.
ShuffleFormer-{T,S, B} successfully improved the
accuracy by {0.3,0.4, 0.6%} to Swin-{T, S, B}.
The results show that our method outperforms the
Swin Transformer in the segmentation task. In
the lightweight model (/Light), our method outper-
formed Swin-B by 0.3% in the case of ShuffleFormer-
B/Light, which has a larger model size. These results
demonstrated that our model is more efficient than the
Swin Transformer.
4.3 Ablation Study on ImageNet-1K
4.3.1 Comparison of Token Mixing
To verify the effectiveness of shuffle mixing, we will
compare the accuracy when Token Mixing is replaced
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
704

with a method that has the nearly same FLOPs. Ac-
curacy comparison of shuffle mixing in the proposed
ShuffleformerM, T/Light with average pooling (Yu
et al., 2022), shift operation (Wang et al., 2022), and
DWconv. Since the kernel size used for shuffle mix-
ing in this paper is 5, the kernel sizes of average pool-
ing and DWconv used in this experiment are set to 5.
Table 3 compares the classification accuracy,
FLOPs, and parameters of each network when we
evaluated on ImageNet validation. The best accu-
racy is written in red ink in the table.. When we
compare the proposed method with 0 FLOPs, 0-
parameter average pooling, and shift operation. The
increase in computational parameters and FLOPs is
also minimal. These results confirm that shuffle mix-
ing is a very computationally inexpensive method.
In terms of accuracy, Shuffle-M improves by 1.06%
from average pooling and 0.63% from shift operation,
while Shuffle-T/Light improves by 1.09% from aver-
age pooling and 0.48% from shift operation. Shuffle-
T/Light improved the accuracy by 1.09% from aver-
age pooling and by 0.48% from shift operation. The
difference in the results is that, as with the exist-
ing convolution method, the kernel weights should be
learnable to extract salient features, which are more
effective in a Transformer-based structure.
Next, we compare the proposed method with DW-
conv, which uses a learnable kernel with a kernel size
of 5 and stride 1, whereas the proposed method uses a
feature map with twice the resolution of DWconv and
learnable weights with a kernel size of 5 and stride
2. The computational parameters and cost are the
same because the proposed method uses a kernel with
twice the resolution of DWconv. A comparison of the
accuracy shows that Shuffle-M improved by 0.25%
and Shuffle-T/Light improved by 0.12%. These re-
sults indicate that the shift operation is more effective
in extracting features by mixing (shuffling) the com-
ponents of different channels and spatial directions
rather than extracting features from only the spatial
direction components of the same channel.
4.3.2 Normalize
In all the following experiments, the baseline model
was ShuffleFormer-M. Ablation of the locations and
methods of Normalization used for the network are
reported in Table 4. First, Layer Norm (Ba et al.,
2016), Batch Norm (Ioffe and Szegedy, 2015), and
Root Mean Square Layer Norm (Zhang and Sennrich,
2019) were compared as a comparison of the normal-
ization methods used for the network. Since there
was no significant difference in performance between
Layer Norm and Batch Norm, Layer Norm is used in
Default for a fair comparison with the Swin Trans-
Table 3: Ablation study on token mixing with Shuffle-M.
Avg pool uses the same token mixing as MetaFormer (Yu
et al., 2022) and Shift uses the same token mixing as Shift
ViT (Wang et al., 2022). DWconv and Proposed show the
results when token mixing is set to DWconv and shuffle
mixing, respectively.
Model size Method Param FLOPs Acc.
(M) (G) (%)
Minute Avg pool 11.92 1.82 76.72
Shift 11.92 1.82 77.15
DWconv 12.00 1.85 77.53
Proposed 12.00 1.85 77.78
Tiny/Light Avg pool 21.57 3.22 78.85
Shift 21.57 3.22 79.46
DWconv 21.69 3.26 79.82
Proposed 21.69 3.26 79.94
Table 4: Ablation study with Shuffle-M. LN indicates Layer
Norm, BN indicates Batch Norm. B2T (Takase et al., 2022)
indicates Bottom-to-Top Connection.
Ablation Variant Acc.(%)
Baseline None(Shuffle-M) 77.78
Kernel Size 5 → 7 78.00
5 → 9 78.23
5 → 11 78.40
5 → 13 78.42
Normalization LN → BN 77.75
Pre Norm → B2T 76.89
former. RMSLN was judged a failure because the
learning did not successfully converge. Next, we
compared Pre Norm, Post Norm, and Bottom-to-up
Connection (B2T) (Takase et al., 2022) at the Normal-
ization location. The results showed that Pre Norm
was superior to B2T by 0.86%, so Pre Norm was cho-
sen. Post Norm had a ”NaN” gradient in one of the
three experiments.
4.3.3 Kernel Size
Ablation of kernel size for shuffle mixing is reported
in Table 4. We evaluated our method using kernel
sizes 5, 7, 9, 11, and 13. As a result, it was confirmed
that the performance improved by about 0.2% with
each increase in kernel size up to kernel size 11. The
lack of performance improvement after kernel size 13
is considered to be due to the small size of the feature
map at ShuffleFormer’s final stage. We confirmed that
it is possible to improve the performance of Shuffle-
Former to some extent by increasing the kernel size.
5 CONCLUSIONS
We proposed a Shuffleformer with a more powerful
patch embedding layer in addition to replacing the
Shuffle Mixing: An Efficient Alternative to Self Attention
705

Self Attention layer of the Vision Transformer with
shuffle mixing, which can effectively aggregate fea-
tures at a low cost. The results on ImageNet-1K and
ADE20K datasets showed that the proposed model
outperformed the conventional Vision Transformers.
Compared with the conventional methods, the im-
provement in this paper is in the token mixing and
patch embedding layers. Therefore, further improve-
ment in accuracy can be expected by adjusting FFN,
Normalization, optimization methods, and other pa-
rameters.
ACKNOWLEDGEMENTS
This work is supported by JSPS KAKENHI Grant
Number 21K11971.
REFERENCES
Arnab, A., Dehghani, M., Heigold, G., Sun, C., Lu
ˇ
ci
´
c, M.,
and Schmid, C. (2021). Vivit: A video vision trans-
former. In Proceedings of the IEEE/CVF Interna-
tional Conference on Computer Vision, pages 6836–
6846.
Ba, J. L., Kiros, J. R., and Hinton, G. E. (2016). Layer
normalization. arXiv preprint arXiv:1607.06450.
Chen, S., Xie, E., Ge, C., Liang, D., and Luo, P. (2021). Cy-
clemlp: A mlp-like architecture for dense prediction.
arXiv preprint arXiv:2107.10224.
Chi, C., Wei, F., and Hu, H. (2020). Relationnet++:
Bridging visual representations for object detection
via transformer decoder. Advances in Neural Infor-
mation Processing Systems, 33:13564–13574.
Cubuk, E. D., Zoph, B., Shlens, J., and Le, Q. V. (2020).
Randaugment: Practical automated data augmentation
with a reduced search space. In Proceedings of the
IEEE/CVF conference on computer vision and pattern
recognition workshops, pages 702–703.
Dai, Z., Liu, H., Le, Q. V., and Tan, M. (2021). Coatnet:
Marrying convolution and attention for all data sizes.
Advances in Neural Information Processing Systems,
34:3965–3977.
Guo, J., Han, K., Wu, H., Tang, Y., Chen, X., Wang, Y.,
and Xu, C. (2022). Cmt: Convolutional neural net-
works meet vision transformers. In Proceedings of
the IEEE/CVF Conference on Computer Vision and
Pattern Recognition, pages 12175–12185.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 770–778.
Howard, A. G., Zhu, M., Chen, B., Kalenichenko, D.,
Wang, W., Weyand, T., Andreetto, M., and Adam,
H. (2017). Mobilenets: Efficient convolutional neu-
ral networks for mobile vision applications. arXiv
preprint arXiv:1704.04861.
Huang, G., Sun, Y., Liu, Z., Sedra, D., and Weinberger,
K. Q. (2016). Deep networks with stochastic depth. In
European conference on computer vision, pages 646–
661. Springer.
Ioffe, S. and Szegedy, C. (2015). Batch normalization: Ac-
celerating deep network training by reducing internal
covariate shift. In International conference on ma-
chine learning, pages 448–456. PMLR.
Katharopoulos, A., Vyas, A., Pappas, N., and Fleuret, F.
(2020). Transformers are rnns: Fast autoregressive
transformers with linear attention. In International
Conference on Machine Learning, pages 5156–5165.
PMLR.
Kirillov, A., Girshick, R., He, K., and Doll
´
ar, P. (2019).
Panoptic feature pyramid networks. In Proceedings
of the IEEE/CVF conference on computer vision and
pattern recognition, pages 6399–6408.
Krizhevsky, A., Sutskever, I., and Hinton, G. E. (2017). Im-
agenet classification with deep convolutional neural
networks. Communications of the ACM, 60(6):84–90.
LeCun, Y., Boser, B., Denker, J. S., Henderson, D., Howard,
R. E., Hubbard, W., and Jackel, L. D. (1989). Back-
propagation applied to handwritten zip code recogni-
tion. Neural computation, 1(4):541–551.
Li, J., Yan, Y., Liao, S., Yang, X., and Shao, L. (2021).
Local-to-global self-attention in vision transformers.
arXiv preprint arXiv:2107.04735.
Liu, H., Dai, Z., So, D., and Le, Q. V. (2021a). Pay attention
to mlps. Advances in Neural Information Processing
Systems, 34:9204–9215.
Liu, Z., Lin, Y., Cao, Y., Hu, H., Wei, Y., Zhang, Z., Lin,
S., and Guo, B. (2021b). Swin transformer: Hierar-
chical vision transformer using shifted windows. In
Proceedings of the IEEE/CVF International Confer-
ence on Computer Vision, pages 10012–10022.
Loshchilov, I. and Hutter, F. (2016). Sgdr: Stochastic
gradient descent with warm restarts. arXiv preprint
arXiv:1608.03983.
Loshchilov, I. and Hutter, F. (2017). Decoupled weight de-
cay regularization. arXiv preprint arXiv:1711.05101.
Mikolov, T., Karafi
´
at, M., Burget, L., Cernock
`
y, J., and
Khudanpur, S. (2010). Recurrent neural network
based language model. In Interspeech, volume 2,
pages 1045–1048. Makuhari.
Radosavovic, I., Kosaraju, R. P., Girshick, R., He, K., and
Doll
´
ar, P. (2020). Designing network design spaces.
In Proceedings of the IEEE/CVF conference on com-
puter vision and pattern recognition, pages 10428–
10436.
Russakovsky, O., Deng, J., Su, H., Krause, J., Satheesh, S.,
Ma, S., Huang, Z., Karpathy, A., Khosla, A., Bern-
stein, M., et al. (2015). Imagenet large scale visual
recognition challenge. International journal of com-
puter vision, 115(3):211–252.
Sharir, G., Noy, A., and Zelnik-Manor, L. (2021). An image
is worth 16x16 words, what is a video worth? arXiv
preprint arXiv:2103.13915.
Strudel, R., Garcia, R., Laptev, I., and Schmid, C. (2021).
Segmenter: Transformer for semantic segmentation.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
706

In Proceedings of the IEEE/CVF International Con-
ference on Computer Vision, pages 7262–7272.
Takase, S., Kiyono, S., Kobayashi, S., and Suzuki,
J. (2022). On layer normalizations and resid-
ual connections in transformers. arXiv preprint
arXiv:2206.00330.
Tolstikhin, I. O., Houlsby, N., Kolesnikov, A., Beyer, L.,
Zhai, X., Unterthiner, T., Yung, J., Steiner, A., Key-
sers, D., Uszkoreit, J., et al. (2021). Mlp-mixer: An
all-mlp architecture for vision. Advances in Neural
Information Processing Systems, 34:24261–24272.
Touvron, H., Cord, M., Douze, M., Massa, F., Sablayrolles,
A., and J
´
egou, H. (2021). Training data-efficient
image transformers & distillation through attention.
In International Conference on Machine Learning,
pages 10347–10357. PMLR.
Vaswani, A., Shazeer, N., Parmar, N., Uszkoreit, J., Jones,
L., Gomez, A. N., Kaiser, Ł., and Polosukhin, I.
(2017). Attention is all you need. Advances in neural
information processing systems, 30.
Wang, G., Zhao, Y., Tang, C., Luo, C., and Zeng, W. (2022).
When shift operation meets vision transformer: An
extremely simple alternative to attention mechanism.
arXiv preprint arXiv:2201.10801.
Wang, W., Xie, E., Li, X., Fan, D.-P., Song, K., Liang, D.,
Lu, T., Luo, P., and Shao, L. (2021). Pyramid vi-
sion transformer: A versatile backbone for dense pre-
diction without convolutions. In Proceedings of the
IEEE/CVF International Conference on Computer Vi-
sion, pages 568–578.
Wu, H., Xiao, B., Codella, N., Liu, M., Dai, X., Yuan,
L., and Zhang, L. (2021). Cvt: Introducing convo-
lutions to vision transformers. In Proceedings of the
IEEE/CVF International Conference on Computer Vi-
sion, pages 22–31.
Yu, W., Luo, M., Zhou, P., Si, C., Zhou, Y., Wang, X., Feng,
J., and Yan, S. (2022). Metaformer is actually what
you need for vision. In Proceedings of the IEEE/CVF
Conference on Computer Vision and Pattern Recogni-
tion, pages 10819–10829.
Yun, S., Han, D., Oh, S. J., Chun, S., Choe, J., and Yoo,
Y. (2019). Cutmix: Regularization strategy to train
strong classifiers with localizable features. In Pro-
ceedings of the IEEE/CVF international conference
on computer vision, pages 6023–6032.
Zhang, B. and Sennrich, R. (2019). Root mean square layer
normalization. Advances in Neural Information Pro-
cessing Systems, 32.
Zhang, H., Cisse, M., Dauphin, Y. N., and Lopez-Paz, D.
(2017). mixup: Beyond empirical risk minimization.
arXiv preprint arXiv:1710.09412.
Zhong, Z., Zheng, L., Kang, G., Li, S., and Yang, Y. (2020).
Random erasing data augmentation. In Proceedings
of the AAAI conference on artificial intelligence, vol-
ume 34, pages 13001–13008.
Zhou, B., Zhao, H., Puig, X., Xiao, T., Fidler, S., Barriuso,
A., and Torralba, A. (2019). Semantic understanding
of scenes through the ade20k dataset. International
Journal of Computer Vision, 127(3):302–321.
Shuffle Mixing: An Efficient Alternative to Self Attention
707
