
SynMotor: A Benchmark Suite for Object Attribute Regression and
Multi-Task Learning
Chengzhi Wu
1
, Linxi Qiu
1
, Kanran Zhou
1
, Julius Pfrommer
2,3
and J
¨
urgen Beyerer
3
1
Institute for Anthropomatics and Robotics, Karlsruhe Institute of Technology, Karlsruhe, Germany
2
Fraunhofer Center for Machine Learning, Karlsruhe, Germany
3
Fraunhofer Institute of Optronics, System Technologies and Image Exploitation IOSB, Karlsruhe, Germany
Keywords:
Computer Vision Benchmark, Object Attribute Regression, Multi-Task Learning.
Abstract:
In this paper, we develop a novel benchmark suite including both a 2D synthetic image dataset and a 3D syn-
thetic point cloud dataset. Our work is a sub-task in the framework of a remanufacturing project, in which
small electric motors are used as fundamental objects. Apart from the given detection, classification, and
segmentation annotations, the key objects also have multiple learnable attributes with ground truth provided.
This benchmark can be used for computer vision tasks including 2D/3D detection, classification, segmenta-
tion, and multi-attribute learning. It is worth mentioning that most attributes of the motors are quantified as
continuously variable rather than binary, which makes our benchmark well-suited for the less explored regres-
sion tasks. In addition, appropriate evaluation metrics are adopted or developed for each task and promising
baseline results are provided. We hope this benchmark can stimulate more research efforts on the sub-domain
of object attribute learning and multi-task learning in the future.
1 INTRODUCTION
Machine learning researchers have developed tremen-
dous inventive network models and algorithms during
the past decade. In parallel, a relatively small number
of benchmarks have been developed for evaluating
and comparing the performance of various models.
Datasets and benchmarks play important roles in the
development of neural networks and drive research
in more challenging directions. A good dataset can
boost the development of a certain computer vision
domain, e.g. , ImageNet (Deng et al., 2009) to im-
age classification, PASCAL VOC (Everingham et al.,
2009) and COCO (Lin et al., 2014) to image detection
and segmentation, KITTI (Geiger et al., 2012) to point
cloud detection, or ShapeNet (Chang et al., 2015) and
S3IDS (Armeni et al., 2016) to point cloud segmenta-
tion. However, among all the computer vision tasks,
the task of attribute regression is less explored due to
the scarcity of suitable benchmarks. Current attribute
learning methods mostly focus on outdoor pedestri-
ans (Li et al., 2015)(Li et al., 2018) or human facials
(Sarafianos et al., 2018)(Kalayeh et al., 2017). The at-
tributes in those datasets are mostly binary (e.g. gen-
der, with glasses or not), and only a few attributes are
continuous variables (e.g. age). On the other hand, re-
gression models with neural networks are mostly used
for non-vision data. We think it would be interesting
if we could contribute to bridging the gap between
attribute learning and regression for the computer vi-
sion community.
In this paper, we propose SynMotor, a bench-
mark that gives the possibility to perform object at-
tribute regression. Multi-task learning and multi-
modal learning are also possible with the provided
dataset. The benchmark originates from a sub-task
within our manufacturing project which aims at the
automatic disassembly of small electric motors. A
mesh model dataset is first generated with a care-
fully developed Blender addon, in which the motor
specifications are saved as object attributes. Subse-
quently, synthetic motor datasets of both 2D image
dataset and corresponding 3D point cloud dataset are
created for deep learning purposes. Apart from the
object attributes ground truth, the ground truth la-
bel of common computer vision tasks including de-
tection, classification, and segmentation are also pro-
vided. Those labels are generated automatically along
with the image or point cloud generation, with no
manual annotation required. On the other hand, the
metrics for common computer vision tasks are already
well-developed, while developing metrics for object
Wu, C., Qiu, L., Zhou, K., Pfrommer, J. and Beyerer, J.
SynMotor: A Benchmark Suite for Object Attr ibute Regression and Multi-Task Learning.
DOI: 10.5220/0011718400003417
In Proceedings of the 18th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2023) - Volume 4: VISAPP, pages
529-540
ISBN: 978-989-758-634-7; ISSN: 2184-4321
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
529
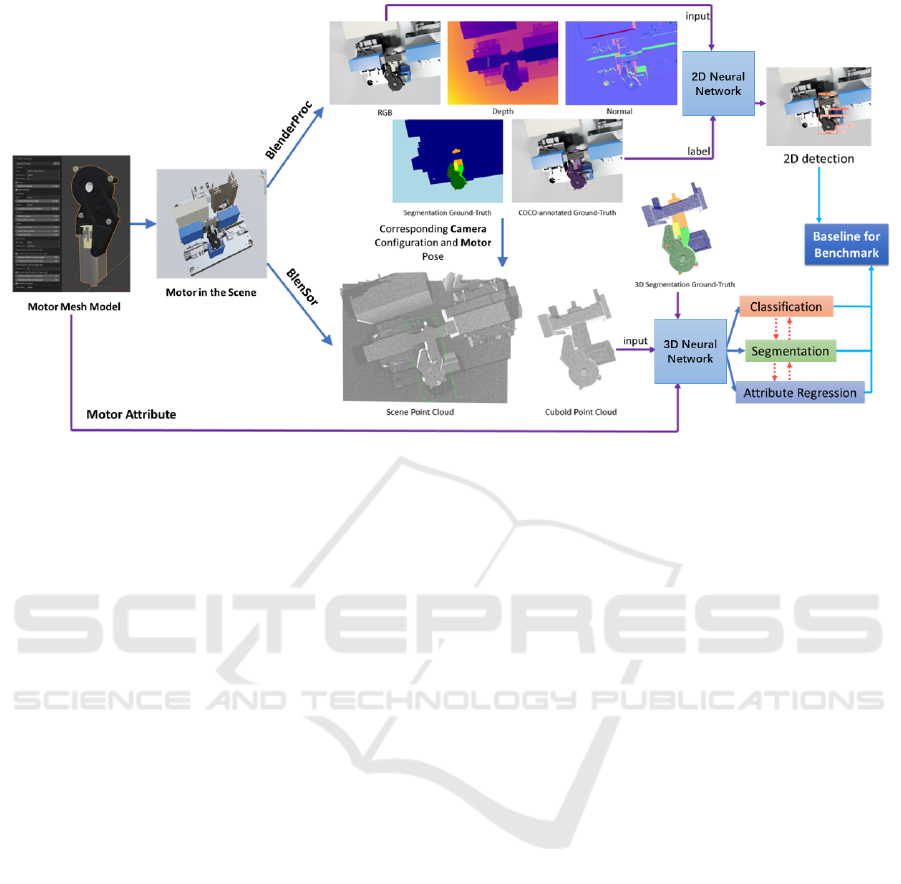
Figure 1: The framework of our work. Synthetic datasets are generated and task metrics are defined. Baseline results of 2D
detection and 3D classification, segmentation, and attribute regression are provided.
attribute regression is more difficult since the met-
rics need to be attribute-oriented. In our benchmark,
we have designed several metrics for attribute regres-
sion given the motor attributes. Baseline results are
also provided in the following experiments with some
widely recognized networks. An illustrative figure of
our framework is given in Figure 1.
The remainder of this paper is structured as fol-
lows: Section 2 summarizes the state-of-the-art of
3D dataset creation, multi-task learning, and attribute
learning. Section 3 shows a pipeline of creating our
synthetic dataset. Section 4 describes the tasks and
the developed metrics. Section 5 gives baseline re-
sults with some widely recognized network models.
Finally, Section 6 summarizes presented results and
discusses future work.
2 RELATED WORK
3D dataset. For 3D object dataset, ModelNet (Wu
et al., 2015) builds a huge dataset of 3D CAD mod-
els and provides the ModelNet40 benchmark for tasks
including 3D shape classification and retrieval. An-
other similar work of ShapeNet (Chang et al., 2015)
provides more detailed semantic annotations, its sub-
sequent work of PartNet (Mo et al., 2019) addition-
ally offers fine-grained semantic segmentation infor-
mation for a subset of the models. (Tremblay et al.,
2018) creates a dataset for object pose estimation.
A large dataset of 3D-printing models is provided in
Thingi10K (Zhou and Jacobson, 2016), while a more
recent ABC dataset (Koch et al., 2019) collects over
1 million CAD models including many mechanical
components. Regarding 3D scenes, KITTI (Geiger
et al., 2012) uses a vehicle-mounted platform outfitted
with a variety of sensors to capture and record road
information. Data for autonomous driving tasks like
3D object detection and 3D tracking are collected.
While (Ros et al., 2016) and (Khan et al., 2019) gen-
erate synthetic datasets for the segmentation and de-
tection of objects in virtual urban scenes, (Le Hoang-
An et al., 2021) generates images from virtual gar-
den scenes. SynthCity (Griffiths and Boehm, 2019)
generates point clouds of urban scenes using Blender.
(Pierdicca et al., 2019) also uses Blender but for
the generation of point clouds of historical objects.
For indoor scenes, SUN-RGBD (Song et al., 2015),
S3DIS (Armeni et al., 2016), and ScanNet (Dai et al.,
2017) use different cameras to scan rooms to get 3D
indoor point cloud dataset.
Multi-task Learning. Overfeat (Sermanet et al.,
2014) trains on classification, localization, and detec-
tion tasks simultaneously using a single shared con-
volutional network. (Eigen and Fergus, 2015) imple-
ments depth prediction, normal estimation, and se-
mantic labeling using a single multi-scale convolu-
tional network. (Kendall et al., 2018) optimizes the
weight of loss during multi-task training according to
the uncertainty of each task, thereby realizing the si-
multaneous learning of classification and regression
tasks of different orders of magnitude. MultiNet (Te-
ichmann et al., 2018) and UberNet (Kokkinos, 2017)
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
530

(a) (b)
(c)
Figure 2: Real-world motors (a) and generated demo mo-
tors. (b) Upper row: no textures added; bottom row: tex-
tures added and rendered. (c) An explosion figure of a gen-
erated motor. The original assembled motor model is also
shown at the rightmost.
offer methods for jointly performing classification,
detection, and semantic segmentation using a unified
architecture and achieving very efficient results. The
above approaches work on the fundamental principle
of a global feature extractor comprised of convolu-
tional layers shared by all tasks and a different out-
put branch for each task. In contrast to previous ap-
proaches, the strategy used in (Misra et al., 2016) and
(Gao et al., 2019) is to have a separate network for
each task while exchanging parameters between their
parallel layers. Ruder (Ruder et al., 2019) divides
each layer into task blocks and information sharing
blocks of previous layers, and the input of each layer
is a linear combination of these two blocks, so that
when learning, you can choose to focus more on the
relevance of the task or the task itself. PAD-Net (Xu
et al., 2018) uses multi-task learning making prelimi-
nary predictions for depth, scene, and surface normal
estimation, then combining these predictions to ob-
tain the refined depth and scene parsing results.
Attribute Learning. Attribute learning refers to the
process of discovering relevant attributes based on
known logical principles. Visual attribute recogni-
tion has become an important research area due to its
high-level semantic information. Previous work like
(Russakovsky and Fei-Fei, 2010) establishes trans-
fer learning by learning visual attributes such as col-
ors, shapes, or textures of images, and makes connec-
tions between semantically unrelated categories. At-
tribute learning has a wide range of applications in the
recognition of pedestrians. (Li et al., 2015) suggests
two deep learning models for surveillance scenarios
(a) (b)
Figure 3: (a) Simulated scene in Blender, with a clamping
system. (b) Camera setting.
to recognize based on a single attribute and multiple
attributes respectively. PGDM (Li et al., 2018) analy-
ses the salient features of the pedestrian’s body struc-
ture, it is helpful for the recognition of pedestrian at-
tributes. DIAA (Sarafianos et al., 2018) utilizes multi-
scale visual attention and weighted focal loss for per-
son attribute recognition. With the widespread popu-
larity of posting selfies in social software, the practice
of recognizing facial attributes is growing, (Liu et al.,
2015) provides a cascaded deep learning framework
for jointly predicting attributes and localizing faces.
(Kalayeh et al., 2017) leverages the information ob-
tained from semantic segmentation to improve facial
feature prediction, (Liu et al., 2018) obtains equiv-
alent discriminative ability for face attribute recog-
nition on CelebA and LFWA (Huang et al., 2008)
datasets by learning disentangled but complementing
face features with minimal supervision.
3 SYNTHETIC DATASET
GENERATION
3.1 Mesh Model Generation
A Blender addon is created for the easy generation of
synthetic motor mesh models. As open-source soft-
ware, Blender (Bonatti et al., 2016) is a proven tool
that performs well in modeling shapes and creating
highly customizable addons. Our addon is able to
generate motor mesh models with various specifica-
tions and save them in desired file formats. Each
component of a generated motor can also be saved
separately. The generated models contain the follow-
ing components: (i) Pole Pot; (ii) Electric Connec-
tion; (iii) Gear Container; (iv) Cover; (v) Side Screws
and (vi) Cover screws. Those are the six main cat-
egories we need to perform segmentation on for the
first step of disassembly. Additionally, the follow-
ing inner components have also been generated : (vii)
Magnets; (viii) Armature; (ix) Lower Gear and (x)
Upper Gear, as presented in Figure 2(c). To generate
SynMotor: A Benchmark Suite for Object Attribute Regression and Multi-Task Learning
531

Table 1: Object attributes and their notations and ranges. The x/y/z values of a key point location are treated as three separate
attributes. Some of the attributes are only valid under certain conditions. The attributes are used in different designed metrics.
SRE stands for size relative error, GLE stands for gear location error, MRE stands for motor rotation error, SLE stands for
screw location error. See a detailed explanation regarding these metrics in Section 4.2.
Notation Attribute Range Validity Involved metric
T Motor type {0,1,2,3,4} always Cls. accuracy
N
s
Number of cover screws {3,4,5} always Cls. accuracy
L
b
Bottom length 6.2 ∼ 8.0 always SRE
L
sb
Sub-bottom length 0.6 ∼2.0 always SRE
D
lg
Lower gear region diameter 3.5 ∼4.5 always SRE
D
ug
Upper gear region diameter 5.0 ∼ 6.5 if T = 0/1/2 SRE
X
lg
,Y
lg
,Z
lg
Lower gear center location (xyz) (1.7 ∼ 2.3,1.0,10.6 ∼ 14.2) always GLE
xyz
,GLE
xz
X
ug
,Y
ug
,Z
ug
Upper gear center location (xyz) (1.7 ∼ 2.5,0.3 ∼ 0.5,13.5 ∼ 17.3) if T = 0/1/2 GLE
xyz
,GLE
xz
R
x
,R
y
,R
z
Motor rotation (rx/ry/rz) (±15
◦
,±5
◦
,±5
◦
) always MRE
X
s
1
,Y
s
1
,Z
s
1
Cover screw 1 location (xyz)
(−4.9 ∼ 5.0,
−3 ∼−1.4,
8.6 ∼20.7)
always SLE
xyz
,SLE
xz
X
s
2
,Y
s
2
,Z
s
2
Cover screw 2 location (xyz) always SLE
xyz
,SLE
xz
X
s
3
,Y
s
3
,Z
s
3
Cover screw 3 location (xyz) always SLE
xyz
,SLE
xz
X
s
4
,Y
s
4
,Z
s
4
Cover screw 4 location (xyz) if N
s
= 4/5 SLE
xyz
,SLE
xz
X
s
5
,Y
s
5
,Z
s
5
Cover screw 5 location (xyz) if N
s
= 5 SLE
xyz
,SLE
xz
motors with various specifications, we provide lots of
parameter options that control the type, size, position,
and rotation of different parts of motor, e.g. screw
position, gear size, or pole pot length. Figure 2(b)
shows ten generated demo motors with different pa-
rameters and an exploded view of a demo motor. All
the individual components mentioned above are mod-
eled separately as illustrated.
3.2 Image and Point Cloud Generation
The generated mesh models are further used to create
synthetic image and point cloud datasets. As shown in
Figure 3(a), a simulated scene is built in Blender for it.
Apart from the lights and cameras, to make the scene
more realistic, a model of the real-world clamping
system and a background panel have been added ad-
ditionally. Three light sources with random changes
in light intensity are placed in the scene. The cam-
era rotates randomly on top of the scene within a cer-
tain view range yet always towards the motor, as illus-
trated in Figure 3(b). To create an image dataset, apart
from the scene images rendered by Blender directly,
BlenderProc (Denninger et al., 2019) is used to gener-
ate corresponding depth images, normal images, and
segmentation ground truth images. Detection ground
truth of bounding boxes of motor and screws are also
provided. On the 3D synthetic data side, BlenSor
(Gschwandtner et al., 2011) is used to simulate the
sensors to create point cloud data as well as to gen-
erate their segmentation ground truth. 3D bounding
boxes are also given. Moreover, for better learning
of key objects, we additionally provide corresponding
sub-point clouds for each scene by cropping random
cuboid regions around the motors, but make sure to
include them. The current version of our benchmark
focuses more on the undismantled motors, hence in-
ner components will not be investigated. However,
any researcher interested in this part is free to use the
provided addon and scripts to generate corresponding
datasets according to their own needs.
3.3 Dataset Details
We have created a synthetic motor mesh dataset of
1000 motor mesh models with different specifica-
tions. They are placed in the same simulated scene
but with random camera settings, random light con-
ditions, and random mild translations and rotations.
With these 1000 scenes, 1000 sets of images and 1000
point clouds are generated respectively. 80% of the
data are randomly selected as the training data, while
the other 20% are used as the test data. To ensure the
correspondence between images and point clouds for
each scene, the camera information has been saved
and shared between BlenderProc and Blensor.
Note that although we only generated 1000 motors
for the dataset creation, it is possible to create a much
larger dataset with more motor models following a
same pipeline. Scripts are used for batch generation,
hence the generation process requires no exhausting
labor work at all. The only manual work is to set some
hyper-parameters. The dataset generation scripts will
also be released. To give a better sense of how long
it takes to generate a dataset of a certain size, we re-
port the time it spent for creating our datasets of 1000
motors. To generate 1000 motor mesh models, it took
around 8 hours. To generate 1000 sets of images, it
took around 12 hours. To generate 1000 point clouds,
it took around 21 hours. These results are based on a
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
532
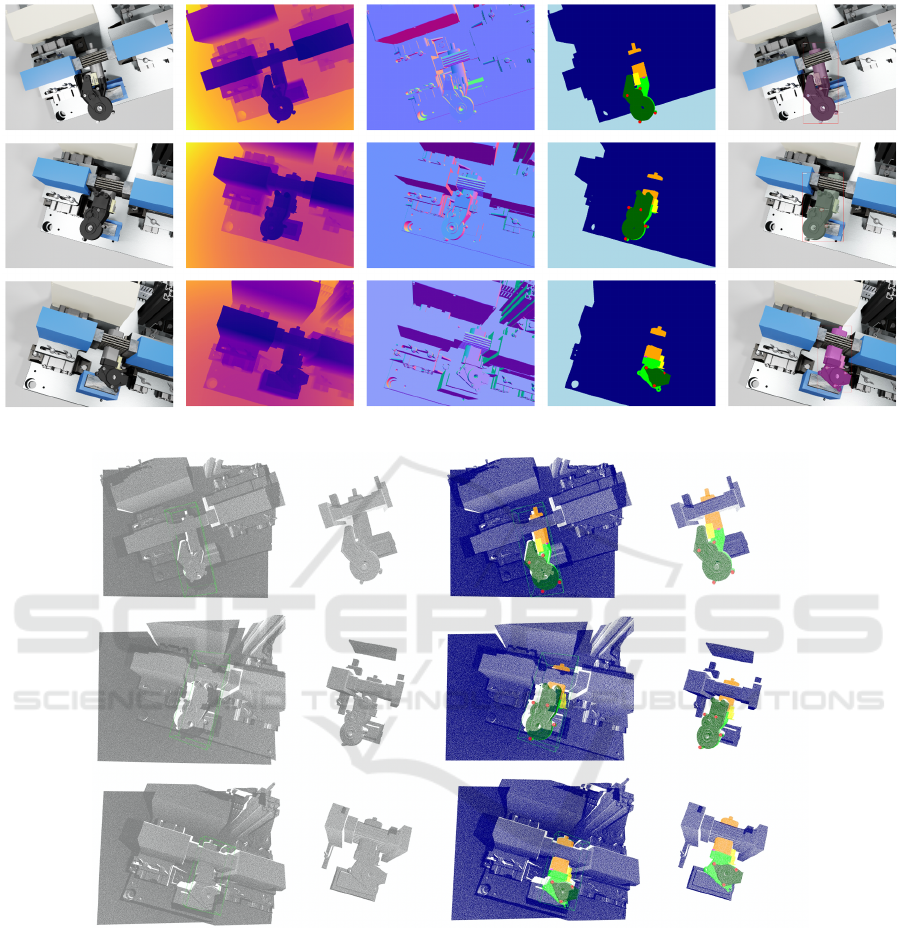
Figure 4: Demos of synthetic image data.
Figure 5: Demos of synthetic point cloud data.
desktop with an Intel Core i5 CPU with 16GB RAM,
and a GTX 1080 GPU. Faster processing can surely
be achieved with better processors and GPUs.
Our datasets are organized as follows.
Mesh Model Dataset. Part obj files and assembled
full shape obj files are both saved, with correspond-
ing material files. Apart from that, all attributes are
saved in a csv file. We select 30 key attributes as
the main learning targets for the benchmark and have
pre-processed them for more convenient usage. The
30 attributes are given in Table 1. Attribute Type and
Number of cover screws are suitable for classification
tasks, while the other 28 attributes are suitable for at-
tribute learning. Note that some attributes are invalid
in some cases, e.g. , the xyz coordinates of 5th cover
screw when the motor only has 4 cover screws. While
the attribute values are set to zero when they are in-
valid, an additional binary mask csv file is provided
for all 28 attributes of all 1000 motors. In our bench-
mark, all 28 attributes are continuous variables and
hence are suitable for attribute regression.
SynMotor: A Benchmark Suite for Object Attribute Regression and Multi-Task Learning
533

Image Dataset. 1000 sets of images are provided.
In each set, there are one rgb image, one depth image,
one normal image, and one segmentation ground truth
image. Detection ground truth of 2D bounding boxes
are provided in the COCO fashion, with a visualized
detection result supplemented. Demos of generated
images are given in Figure 4.
Point Cloud Dataset. 1000 sets of point clouds are
provided. In each set, there are one scene point cloud
and one cropped point cloud which focuses on the
motor region. 3D bounding boxes are provided. Seg-
mentation ground truth labels are also provided. Fig-
ure 5 gives a demo of generated point clouds colored
in their segmentation ground truth.
4 DESIGNED TASKS AND
METRICS
4.1 Common Computer Vision Tasks
Detection. The detection task is to detect the posi-
tions of the key objects in the scene and to draw 2D
or 3D bounding boxes around each object of inter-
est in RGB images or point clouds. For 2D detec-
tion, the widely used mean average precision (mAP)
was originally proposed in the VOC challenge (Ever-
ingham et al., 2009). We use an advanced version in
COCO (Lin et al., 2014) which further considers dif-
ferent IoU thresholds. The two metrics are (i) mAP
with IoU threshold of 0.5; (ii) average mAP with IoU
threshold of 0.5,0.55, 0.6,.. .,0.95. For 3D detection,
we require a 3D bounding box overlap of 70% for
computing the precision-recall curve and the mAP.
Classification. The task of classification is to clas-
sify the key object in the scene into the prior-defined
categories. There are 5 types of motors in our dataset,
the main differences between them are the number of
gears and the shape of covers. The classification task
can be performed on both 2D dataset and 3D dataset.
The well-known classification accuracy is used as the
metric for the classification task. This is a relatively
easy task in our setting since we only have 5 cate-
gories for classification and none of them is a tail cat-
egory.
Segmentation. Segmentation on 2D images is the
process of assigning a label to every pixel in the im-
age such that pixels with the same label share cer-
tain characteristics. 3D point cloud segmentation is
the process of classifying point clouds into different
Figure 6: Object attribute regression metrics.
regions, so that the points in the same isolated re-
gion have similar properties. Common segmentation
metrics are category-wise IoU and overall mIoU. In
our case, the overall mIoU metric is used. Moreover,
since the screw categories are the key categories in
real-world applications, an additional metric of screw
mIoU is performed.
4.2 Object Attribute Regression
When generating the motor mesh models, their de-
tailed geometric attributes are also saved, including
the length of the pole pot, the diameter of the gear
region, the positions of the screws, etc., which pro-
vides the possibility for regression learning. Evalua-
tion metrics for assessing these learned attributes are
proposed with consideration on multi-perspectives,
including object size, object orientation, and object
key point positions. It is worth noting that since the
attributes are not always valid in all scenes, a binary
mask is used for the metrics to get more accurate er-
ror information. In the following definition of each
metric, for a more clear description, we use A to de-
note the union set of involved attributes, with a cor-
responding binary mask M
a
. Note that the following
metrics are only used for evaluation, the loss used for
the training is computed with a masked mean square
error (MSE) between the predicted results and the
ground truth.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
534

Size Relative Error (SRE). This metric evaluates
the predicted overall motor size using four key at-
tributes which represent the main body of motors:
the lengths of the bottom and the sub-bottom part,
i.e. pole pot, and the diameters of the gear re-
gions. Denote A as the union set of those attributes:
A ∈ {L
b
,L
sb
,D
lg
,D
ug
} with a corresponding binary
mask M
a
, for a batch of N motor point clouds with
ground truth A
∗
, the SRE metric is given as
SRE =
1
N
N
∑
i=1
1
∥M
a
i
∥
1
∑
A
i
|M
a
i
A
i
−A
∗
i
|
1 −M
a
i
+ A
∗
i
!
(1)
where
∑
M
a
i
counts the valid attribute number in ith
motor and 1 −M
a
i
is served as a safety term to ensure
the denominator is greater than 0 When A
∗
i
= 0. For
a certain attribute of a certain motor that is invalid,
its ground truth value and mask value are both 0, i.e.
A
∗
i
= M
a
i
= 0, its size relative error is computed as
zero and this attribute will not be counted in the de-
nominator.
Note that we compute a mean error over the in-
stance level for SRE. We believe this can represent the
metric information better. The following three met-
rics are performed over the batch level.
Gear Location Error (GLE). This metric evalu-
ates the distance error between the predicted loca-
tion of gear region center and its ground truth. In-
volved attributes are the center point coordinate val-
ues. Denote A
l
and A
u
as the union sets of those at-
tributes: A
l
∈ {X
lg
,Y
lg
,Z
lg
} and A
u
∈ {X
ug
,Y
ug
,Z
ug
}
with masks M
al
and M
au
, for a batch of N motor point
clouds, the GLE
xyz
metric is given as
GLE
xyz
=
∑
N
i=1
r
∑
A
l
i
M
al
i
A
l
i
−A
∗
l
i
2
+
r
∑
A
u
i
(
M
au
i
A
u
i
−A
∗
u
i
)
2
!
∑
N
i=1
(
∥M
al
i
∥
1
/3+∥M
au
i
∥
1
/3
)
(2)
where M
au
i
/3 means for the 3D coordinate of each
center point, the mask should only be counted for one
time. In real-world applications of disassembly, the
small error along the motor normal direction (in our
case, the Y axis) is sometimes irrelevant. We further
provide another metric that only considers the dis-
tance error on the XZ plane with projected points. By
redefining A
l
∈ {X
lg
,Z
lg
} and A
u
∈ {X
ug
,Z
ug
}, a sim-
ilar metric of GLE
xz
is given as
GLE
xz
=
∑
N
i=1
r
∑
A
l
i
M
al
i
A
l
i
−A
∗
l
i
2
+
r
∑
A
u
i
(
M
au
i
A
u
i
−A
∗
u
i
)
2
!
∑
N
i=1
(
∥M
al
i
∥
1
/2+∥M
au
i
∥
1
/2
)
(3)
Motor Rotation Error (MRE). This metric eval-
uates the absolute motor rotation error. Involved at-
tributes are the motor rotations along three axes. De-
note A as the union set of those involved attributes:
A ∈ {R
x
,R
y
,R
z
}. Since the rotation attributes are al-
ways valid, the mask M
a
is unnecessary for computa-
tion. The metric MRE is defined as
MRE =
1
3N
N
∑
i=1
∑
A
i
|A
i
−A
∗
i
| (4)
Screw Location Error (SLE). This metric evalu-
ates the distance error between the predicted cover
screw positions and their ground truth. Involved at-
tributes are the screw position coordinate values. De-
note A
j
as the union set of those attributes: A
j
∈
{X
s
j
,Y
s
j
,Z
s
j
} with masks M
a j
where j = 1,2, 3,4,5.
For a batch of N motor point clouds, the SLE
xyz
met-
ric is given as
SLE
xyz
=
∑
N
i=1
∑
5
j=1
r
∑
A
j
i
M
a j
i
A
j
i
−A
∗
j
i
2
∑
N
i=1
∑
5
j=1
∥M
a j
i
∥
1
/3
(5)
where M
a j
i
/3 means for the 3D coordinate of each
screw, the mask should only be counted for one time.
Same as GLE, a metric SLE
xz
only considers the XZ
plane is defined with A
j
∈ {X
s
j
,Z
s
j
}:
SLE
xz
=
∑
N
i=1
∑
5
j=1
r
∑
A
j
i
M
a j
i
A
j
i
−A
∗
j
i
2
∑
N
i=1
∑
5
j=1
∥M
a j
i
∥
1
/2
(6)
4.3 Multi-Task Learning
Multi-task learning (Ruder, 2017)(Zhang and Yang,
2017) means solving multiple learning tasks simulta-
neously, while exploiting the commonalities and dif-
ferences between tasks. This can improve the learn-
ing efficiency and prediction accuracy of task-specific
models compared to training the models individually.
While acceptable performance can be obtained by fo-
cusing on a single task, the information that might
help in getting better performance is possibly ignored.
Specifically, the information comes from training sig-
nals on related tasks. By sharing representations be-
tween related tasks, the generalization ability of the
model can be improved on the original task.
In our case, the above tasks can be performed si-
multaneously with a same backbone network. For
example, classification and segmentation can be per-
formed at the same time. Or as mentioned in the last
subsection, the classification, detection, and segmen-
tation results may be used as additional input for the
regression task. Multi-modal learning is also possible
by using both 2D and 3D data.
SynMotor: A Benchmark Suite for Object Attribute Regression and Multi-Task Learning
535
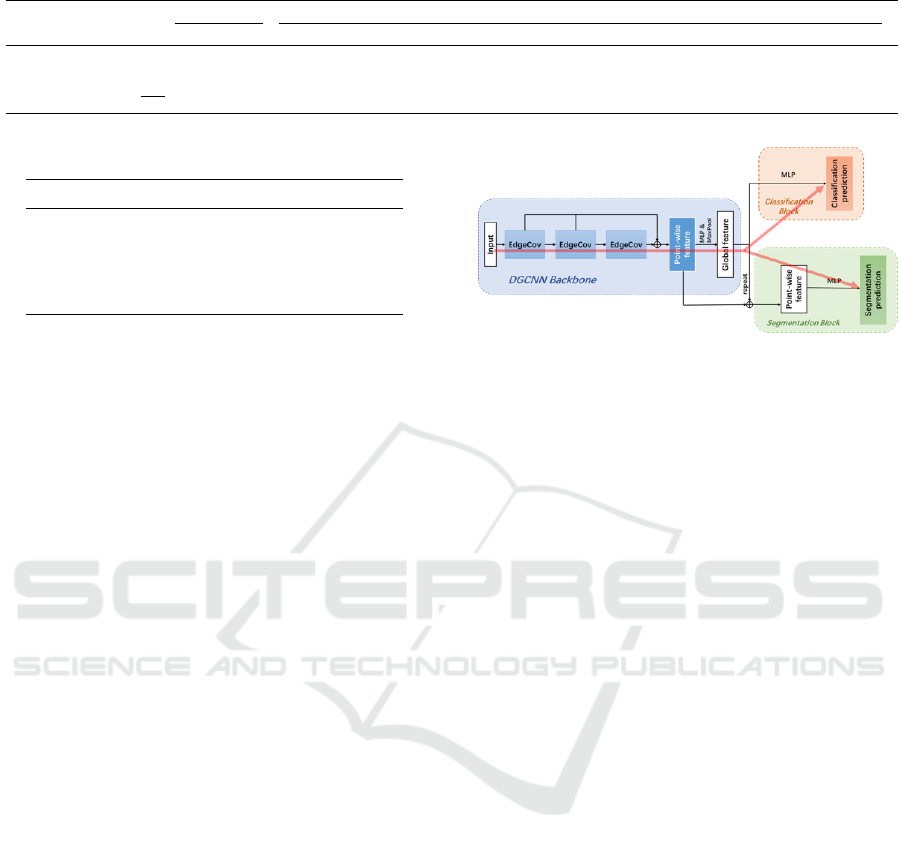
Table 2: 3D classification and segmentation baseline results.
Model Loss
Classification Segmentation (mIoU)
(Accuracy) Overall Background Cover Gear Container Charger Bottom Side Screw Cover Screw Screw
DGCNN (cls) L
c
100 - - - - - - - - -
DGCNN (seg) L
s
- 93.24 99.89 98.63 95.80 97.32 98.29 79.72 83.10 82.73
DGCNN (cls+seg) L
c
+ L
s
100 92.47 99.87 98.43 95.41 96.97 98.15 77.05 81.38 80.83
DGCNN (cls+seg)
√
L
c
L
s
100 92.41 99.87 98.40 95.35 96.87 98.18 76.94 81.20 80.66
Table 3: 2D Detection baseline results.
Model mAP (IoU 0.5-0.95) mAP (IoU 0.5)
YOLOv5n 75.3 93.6
YOLOv5s 77.8 94.2
YOLOv5m 82.7 95.9
YOLOv5l 86.7 96.4
YOLOv5x 89.1 96.8
5 BASELINE RESULTS
5.1 2D Detection
Since there is no such network architecture for 3D
point cloud detection as widely recognized as YOLO
series for 2D image detection, for the detection task,
we give baseline results on the 2D image dataset.
YOLO models of different sizes are used. All the
experiments are performed with same parameter set-
tings. The input image resolution is 640, the batch
size is 16. The optimizer SGD is used with an epoch
number of 200. The learning rate starts at 0.01 and
decays to 0.001 with a linear decay. The mAP perfor-
mances of all models are given in Table 3. It shows
that the YOLO framework achieves remarkable per-
formance on detection tasks. The mAP performance
also improves when a larger network model is used.
5.2 3D Classification and Segmentation
In the past five years, a variety of network models
have been proposed for point cloud data. Multi-view
based (Lawin et al., 2017)(Boulch et al., 2017) and
volumetric-based methods (Maturana and Scherer,
2015)(Jiang et al., 2018) are mostly used in the early
years. Since the pioneer work of PointNet (Qi et al.,
2017a), point-based methods which include point-
wise MLP (Qi et al., 2017b), point convolution-based
methods (Wu et al., 2019)(Thomas et al., 2019) and
graph-based methods (Wang et al., 2019)(Chen et al.,
2021)(Liang et al., 2020), gradually became the main
choice. Recent work even adapt the idea of trans-
former (Vaswani et al., 2017) for point cloud learn-
ing, e.g. , PCT (Guo et al., 2021) and PT (Zhao et al.,
2020)(Engel et al., 2021). Among all those methods,
PointNet++ (Qi et al., 2017b) and DGCNN (Wang
Figure 7: 3D classification and segmentation framework for
baseline results.
et al., 2019) are recognized as two key work in the
domain. In this paper, we use DGCNN as the network
backbone to produce baseline results.
We use an architecture of three successive Edge-
Conv blocks (key block in DGCNN) to learn point-
wise features, a linear layer and a max pooling layer is
applied subsequently to compute a global feature. For
the classification task, the global feature is processed
with several followed dense layers to get a classifi-
cation prediction; while for the segmentation task,
the global feature is repeated and concatenated with
point-wise features to process through several other
dense layers to predict point-wise labels. An illustra-
tive figure is given in Figure 7. Note that although two
tail blocks are different, the encoder block is identical.
It is possible to use a shared encoder for both classifi-
cation and segmentation tasks. In this case, by adding
the losses together and performing gradient backprop-
agation at the same time, we can train on the classifi-
cation task and the segmentation task simultaneously.
This is a simple way of performing multi-task learn-
ing. The red line indicates how the information flows
during one training step. The encoder block is co-
trained with both tasks, while the respective task tail
blocks are trained in parallel.
The settings of these three experiments are iden-
tical. We use a sub-point cloud size of 2048 points
for batch training. The batch size is 16. The op-
timizer AdamW is used with an epoch number of
100. The learning rate starts with 1 ×10
−3
and de-
cays to 1 ×10
−5
with a cosine annealing schedule.
In the EdgeConv blocks, we use K = 32 when se-
lecting neighbor points. Table 2 indicates that the
DGCNN global feature allows for complete identifi-
cation of the motor types since it is a relatively easy
task. However, the segmentation results from the
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
536

Table 4: 3D regression baseline results. T stands for motor type, N
s
stands for the number of cover screws. SRE stands for
size relative error, GLE stands for gear location error, MRE stands for motor rotation error, SLE stands for screw location
error. Results on all four kinds of methods are presented. Results with or without using the additional segmentation task in
the meta-block are both presented.
Method with seg
Classification ↑ Segmentation ↑ Regression ↓
T accuracy N
s
accuracy mIoU Screw mIoU SRE GLE
xyz
GLE
xz
MRE SLE
xyz
SLE
xz
Separate
no 100 80.86 - - 6.20% 0.3745 0.3741 0.9398 0.6171 0.6138
yes 100 82.52 90.27 74.84 6.20% 0.3745 0.3741 0.9398 0.6171 0.6138
Pre-train
no 100 80.86 - - 5.56% 0.3423 0.3418 0.8237 0.5615 0.5585
yes 100 82.52 90.27 74.84 5.41% 0.3500 0.3499 0.8039 0.5556 0.5536
Parallel
no 100 75.98 - - 5.66% 0.3199 0.3196 0.8233 0.5500 0.5477
yes 100 76.40 88.65 71.36 5.81% 0.3759 0.3757 0.8518 0.5869 0.5829
Iterative
no 100 81.52 - - 6.03% 0.4043 0.4040 0.9386 0.6100 0.6053
yes 100 82.82 90.49 75.63 5.84% 0.3721 0.3719 0.9444 0.5759 0.5740
multi-task training model are not as good as that from
individual training. Using loss weights to balance the
gradient information from two tails blocks may im-
prove the results. We would like to leave this problem
to other researchers that are interested in this topic.
5.3 3D Object Attribute Regression
Same as in the previous subsection, DGCNN is used
as the backbone for encoding point-wise features and
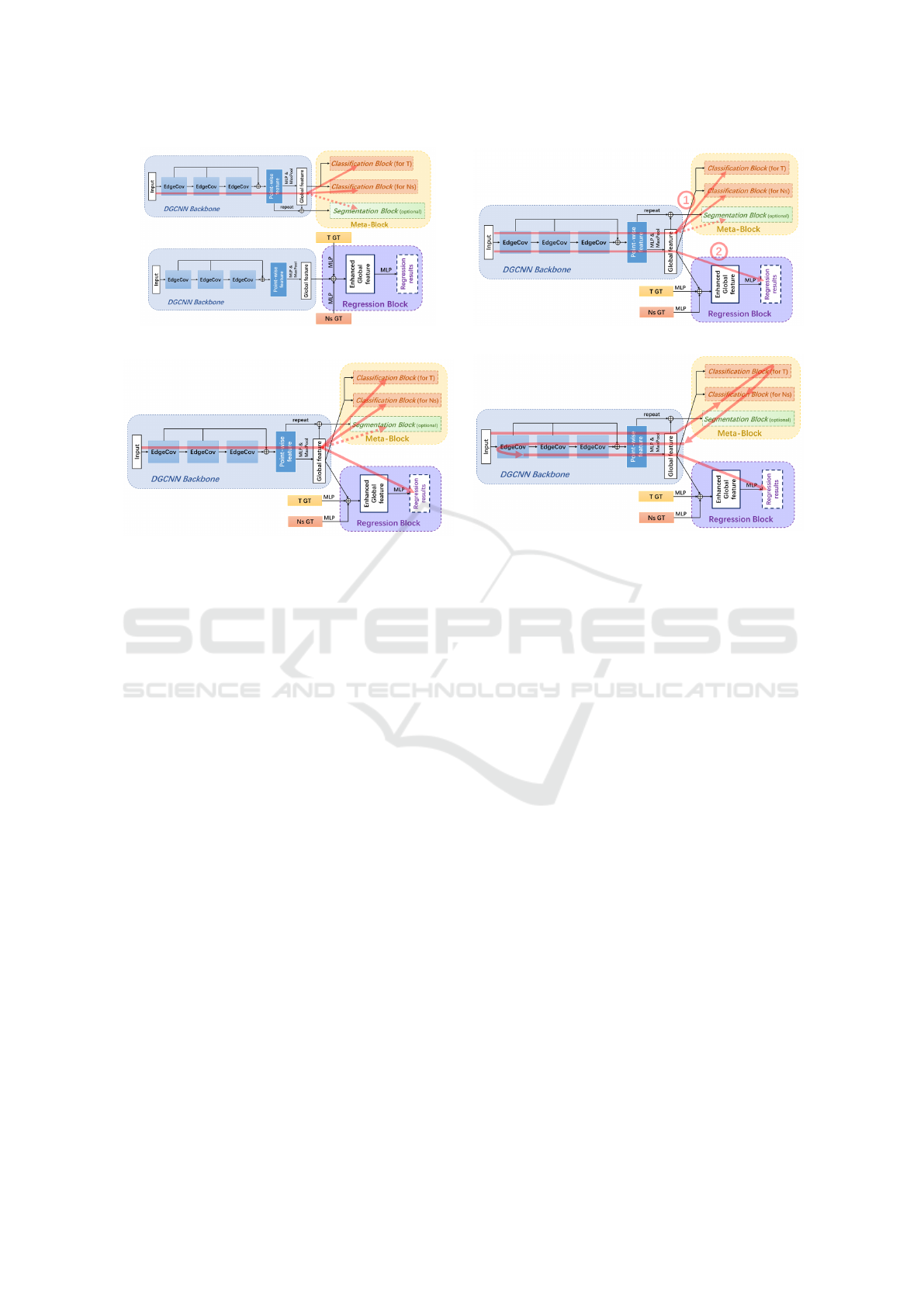
a global feature. Moreover, as illustrated in Figure
8, we consider the classification-segmentation paral-
lel training introduced in the previous subsection as a
meta-block. Note that since the one-hot attributes T
and N
s
indicate the validity of some other attributes,
apart from the block of motor type classification, an-
other block for classifying the number of cover screws
has also been included in the meta-block. The regres-
sion tasks compose a second tail block. In our case,
we use a simple method of concatenating the global
feature with one-hot features that have been encoded
with MLPs, and then directly perform MLP on the en-
hanced global feature to get a 28-dimensional vector,
which indicates the regression results of 28 attributes.
With the proposed architecture, there are several
possible ways to train those blocks. (i) Totally sep-
arate training: the encoder and the meta-block are
trained as one network first, and then another same-
structure encoder and the regression block are trained
as another totally separate network. No informa-
tion is shared between two trainings. (ii) Use meta-
block for pre-training: this method is similar to
the last one, but the encoder weights in the second
step will be initialized with the weights from the first
step. The meta-block is used for pre-training. (iii)
Encoder-shared yet tail blocks trained in paral-
lel: the encoder is shared between two tail blocks
and three blocks compose one joint network. All
tasks are trained in parallel. (iv) Encoder-shared and
tail blocks trained iteratively: in each training step,
the encoder is firstly connected with the meta-block.
We compute the loss, perform gradient backpropaga-
tion and update model weights with these two blocks.
Then the same encoder connects with the regression
block in a switch manner, the input is reprocessed
with the weight-updated encoder to get new encoded
representations which are used for computing the re-
gression loss. We then again perform gradient back-
propagation and weight update in these two blocks.
This action performs iteratively. The red line in Fig-
ure 8 indicates how the information flows during one
training step.
The experiments of the four methods used same
settings. We set a sub-point cloud size of 2048 points
for batch training. The batch size is 16. The op-
timizer AdamW is used with an epoch number of
100. The learning rate starts with 1 ×10
−3
and de-
cays to 1 ×10
−5
with a cosine annealing schedule. In
the EdgeConv blocks, we use K = 32 when select-
ing neighbor points. As shown in Table 4, in most
cases, performing attribute regression with semantic
segmentation decreases the regression error. Regres-
sion can also help in determining the number of cover
screws. Among them, the separate-based method is
the most simple one and it achieves the worst re-
gression results. The pretrain-based method signifi-
cantly improves the regression results. Overall, the
parallel-based method achieves better performance in
most regression metrics. However, since losses are
merged together during the training, the classification
and segmentation performances drop slightly with the
parallel-based method. The iterative training-based
approach achieves the best results for segmentation,
but does not achieve the best results in regression.
There are surely some other better ways of designing
the architecture, e.g. , post-processing on the segmen-
tation results for better N
s
classification results, or us-
ing 2D detection results as the supplementary input.
We would like to leave this as an open question for
other interested researchers.
SynMotor: A Benchmark Suite for Object Attribute Regression and Multi-Task Learning
537
(a) Totally separate training.. (b) Use meta-block for pre-training..
(c) Encoder-shared yet tail blocks trained in parallel..
(d) Encoder-shared and tail blocks trained iteratively..
Figure 8: Four different training methods for baseline results on the 3D regression framework. The red lines indicate how the
information flows inside these frameworks.
6 CONCLUSION
In this paper, a benchmark is proposed using synthetic
2D and 3D dataset, in which motors are the key ob-
jects. Motor attributes are saved during the dataset
generation and are suitable for the less explored at-
tribute regression task. Apart from the common com-
puter vision tasks including classification, detection,
and segmentation, several metrics have been designed
especially for the regression task. Baseline results on
several tasks are also provided. We hope this work
could contribute to the attribute regression or multi-
task learning domain in the computer vision commu-
nity and inspire the development of other novel algo-
rithms in the future.
ACKNOWLEDGEMENTS
The project AgiProbot is funded by the Carl Zeiss
Foundation.
REFERENCES
Armeni, I., Sener, O., Zamir, A. R., Jiang, H., Brilakis, I. K.,
Fischer, M., and Savarese, S. (2016). 3d semantic
parsing of large-scale indoor spaces. 2016 IEEE Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 1534–1543.
Bonatti, C., Crovisier, S., Diaz, L., and Wilkinson, A.
(2016). What is... a blender? arXiv preprint
arXiv:1608.02848.
Boulch, A., Le Saux, B., and Audebert, N. (2017). Un-
structured point cloud semantic labeling using deep
segmentation networks. 3DOR@ Eurographics, 3.
Chang, A. X., Funkhouser, T. A., Guibas, L. J., Hanra-
han, P., Huang, Q., Li, Z., Savarese, S., Savva, M.,
Song, S., Su, H., Xiao, J., Yi, L., and Yu, F. (2015).
Shapenet: An information-rich 3d model repository.
ArXiv, abs/1512.03012.
Chen, C., Fragonara, L. Z., and Tsourdos, A. (2021). Gap-
net: Graph attention based point neural network for
exploiting local feature of point cloud. Neurocomput-
ing, 438:122–132.
Dai, A., Chang, A. X., Savva, M., Halber, M., Funkhouser,
T. A., and Nießner, M. (2017). Scannet: Richly-
annotated 3d reconstructions of indoor scenes. 2017
IEEE Conference on Computer Vision and Pattern
Recognition (CVPR), pages 2432–2443.
Deng, J., Dong, W., Socher, R., Li, L.-J., Li, K., and Fei-
Fei, L. (2009). Imagenet: A large-scale hierarchical
image database. 2009 IEEE Conference on Computer
Vision and Pattern Recognition, pages 248–255.
Denninger, M., Sundermeyer, M., Winkelbauer, D., Zi-
dan, Y., Olefir, D., Elbadrawy, M., Lodhi, A., and
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
538

Katam, H. (2019). Blenderproc. arXiv preprint
arXiv:1911.01911.
Eigen, D. and Fergus, R. (2015). Predicting depth, surface
normals and semantic labels with a common multi-
scale convolutional architecture. 2015 IEEE Interna-
tional Conference on Computer Vision (ICCV), pages
2650–2658.
Engel, N., Belagiannis, V., and Dietmayer, K. C. J. (2021).
Point transformer. IEEE Access, 9:134826–134840.
Everingham, M., Gool, L. V., Williams, C. K. I., Winn,
J. M., and Zisserman, A. (2009). The pascal visual
object classes (voc) challenge. International Journal
of Computer Vision, 88:303–338.
Gao, Y., She, Q., Ma, J., Zhao, M., Liu, W., and Yuille,
A. L. (2019). Nddr-cnn: Layerwise feature fusing in
multi-task cnns by neural discriminative dimensional-
ity reduction. 2019 IEEE/CVF Conference on Com-
puter Vision and Pattern Recognition (CVPR), pages
3200–3209.
Geiger, A., Lenz, P., and Urtasun, R. (2012). Are we ready
for autonomous driving? the kitti vision benchmark
suite. 2012 IEEE Conference on Computer Vision and
Pattern Recognition, pages 3354–3361.
Griffiths, D. and Boehm, J. (2019). Synthcity: A large scale
synthetic point cloud. ArXiv, abs/1907.04758.
Gschwandtner, M., Kwitt, R., Uhl, A., and Pree, W. (2011).
Blensor: Blender sensor simulation toolbox. In In-
ternational Symposium on Visual Computing, pages
199–208. Springer.
Guo, M.-H., Cai, J., Liu, Z.-N., Mu, T.-J., Martin, R. R., and
Hu, S. (2021). Pct: Point cloud transformer. Comput.
Vis. Media, 7:187–199.
Huang, G. B., Mattar, M., Berg, T., and Learned-Miller,
E. (2008). Labeled faces in the wild: A database
for studying face recognition in unconstrained envi-
ronments. In Workshop on faces in’Real-Life’Images:
detection, alignment, and recognition.
Jiang, M., Wu, Y., Zhao, T., Zhao, Z., and Lu, C.
(2018). Pointsift: A sift-like network module for 3d
point cloud semantic segmentation. arXiv preprint
arXiv:1807.00652.
Kalayeh, M. M., Gong, B., and Shah, M. (2017). Improv-
ing facial attribute prediction using semantic segmen-
tation. 2017 IEEE Conference on Computer Vision
and Pattern Recognition (CVPR), pages 4227–4235.
Kendall, A., Gal, Y., and Cipolla, R. (2018). Multi-task
learning using uncertainty to weigh losses for scene
geometry and semantics. 2018 IEEE/CVF Conference
on Computer Vision and Pattern Recognition, pages
7482–7491.
Khan, S., Phan, B., Salay, R., and Czarnecki, K. (2019).
Procsy: Procedural synthetic dataset generation to-
wards influence factor studies of semantic segmenta-
tion networks. In CVPRW, pages 88–96.
Koch, S., Matveev, A., Jiang, Z., Williams, F., Artemov, A.,
Burnaev, E., Alexa, M., Zorin, D., and Panozzo, D.
(2019). Abc: A big cad model dataset for geometric
deep learning. CVPR, pages 9593–9603.
Kokkinos, I. (2017). Ubernet: Training a universal con-
volutional neural network for low-, mid-, and high-
level vision using diverse datasets and limited mem-
ory. 2017 IEEE Conference on Computer Vision and
Pattern Recognition (CVPR), pages 5454–5463.
Lawin, F. J., Danelljan, M., Tosteberg, P., Bhat, G., Khan,
F. S., and Felsberg, M. (2017). Deep projective 3d
semantic segmentation. In International Conference
on Computer Analysis of Images and Patterns, pages
95–107. Springer.
Le Hoang-An, Mensink, T., Das, P., Karaoglu, S., and Gev-
ers, T. (2021). Eden: Multimodal synthetic dataset
of enclosed garden scenes. 2021 IEEE Winter Con-
ference on Applications of Computer Vision (WACV),
pages 1578–1588.
Li, D., Chen, X., and Huang, K. (2015). Multi-attribute
learning for pedestrian attribute recognition in surveil-
lance scenarios. 2015 3rd IAPR Asian Conference on
Pattern Recognition (ACPR), pages 111–115.
Li, D., Chen, X., Zhang, Z., and Huang, K. (2018). Pose
guided deep model for pedestrian attribute recognition
in surveillance scenarios. 2018 IEEE International
Conference on Multimedia and Expo (ICME), pages
1–6.
Liang, Z., Yang, M., Li, H., and Wang, C. (2020). 3d in-
stance embedding learning with a structure-aware loss
function for point cloud segmentation. IEEE Robotics
and Automation Letters, 5:4915–4922.
Lin, T.-Y., Maire, M., Belongie, S. J., Hays, J., Perona, P.,
Ramanan, D., Doll
´
ar, P., and Zitnick, C. L. (2014).
Microsoft coco: Common objects in context. In
ECCV.
Liu, Y., Wei, F., Shao, J., Sheng, L., Yan, J., and Wang,
X. (2018). Exploring disentangled feature representa-
tion beyond face identification. 2018 IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition,
pages 2080–2089.
Liu, Z., Luo, P., Wang, X., and Tang, X. (2015). Deep learn-
ing face attributes in the wild. 2015 IEEE Interna-
tional Conference on Computer Vision (ICCV), pages
3730–3738.
Maturana, D. and Scherer, S. (2015). Voxnet: A 3d con-
volutional neural network for real-time object recog-
nition. In 2015 IEEE/RSJ International Conference
on Intelligent Robots and Systems (IROS), pages 922–
928. IEEE.
Misra, I., Shrivastava, A., Gupta, A. K., and Hebert, M.
(2016). Cross-stitch networks for multi-task learning.
2016 IEEE Conference on Computer Vision and Pat-
tern Recognition (CVPR), pages 3994–4003.
Mo, K., Zhu, S., Chang, A. X., Yi, L., Tripathi, S., Guibas,
L. J., and Su, H. (2019). Partnet: A large-scale bench-
mark for fine-grained and hierarchical part-level 3d
object understanding. 2019 IEEE/CVF Conference
on Computer Vision and Pattern Recognition (CVPR),
pages 909–918.
Pierdicca, R., Mameli, M., Malinverni, E., Paolanti, M., and
Frontoni, E. (2019). Automatic generation of point
cloud synthetic dataset for historical building repre-
sentation. In AVR, pages 203–219.
Qi, C., Su, H., Mo, K., and Guibas, L. (2017a). Pointnet:
SynMotor: A Benchmark Suite for Object Attribute Regression and Multi-Task Learning
539

Deep learning on point sets for 3d classification and
segmentation. CVPR, pages 77–85.
Qi, C. R., Yi, L., Su, H., and Guibas, L. J. (2017b).
PointNet++: Deep hierarchical feature learning on
point sets in a metric space. arXiv preprint
arXiv:1706.02413.
Ros, G., Sellart, L., Materzynska, J., V
´
azquez, D., and
L
´
opez, A. M. (2016). The synthia dataset: A large
collection of synthetic images for semantic segmenta-
tion of urban scenes. CVPR, pages 3234–3243.
Ruder, S. (2017). An overview of multi-task learning in
deep neural networks. ArXiv, abs/1706.05098.
Ruder, S., Bingel, J., Augenstein, I., and Søgaard, A.
(2019). Latent multi-task architecture learning. In
AAAI.
Russakovsky, O. and Fei-Fei, L. (2010). Attribute learning
in large-scale datasets. In ECCV Workshops.
Sarafianos, N., Xu, X., and Kakadiaris, I. (2018). Deep im-
balanced attribute classification using visual attention
aggregation. ArXiv, abs/1807.03903.
Sermanet, P., Eigen, D., Zhang, X., Mathieu, M., Fergus,
R., and LeCun, Y. (2014). Overfeat: Integrated recog-
nition, localization and detection using convolutional
networks. CoRR, abs/1312.6229.
Song, S., Lichtenberg, S. P., and Xiao, J. (2015). Sun
rgb-d: A rgb-d scene understanding benchmark suite.
2015 IEEE Conference on Computer Vision and Pat-
tern Recognition (CVPR), pages 567–576.
Teichmann, M., Weber, M., Z
¨
ollner, J. M., Cipolla, R., and
Urtasun, R. (2018). Multinet: Real-time joint seman-
tic reasoning for autonomous driving. 2018 IEEE In-
telligent Vehicles Symposium (IV), pages 1013–1020.
Thomas, H., Qi, C. R., Deschaud, J.-E., Marcotegui, B.,
Goulette, F., and Guibas, L. J. (2019). Kpconv: Flexi-
ble and deformable convolution for point clouds. In
Proceedings of the IEEE/CVF international confer-
ence on computer vision, pages 6411–6420.
Tremblay, J., To, T., and Birchfield, S. (2018). Falling
things: A synthetic dataset for 3d object detection and
pose estimation. CVPRW, pages 2119–21193.
Vaswani, A., Shazeer, N., Parmar, N., Uszkoreit, J., Jones,
L., Gomez, A. N., Kaiser, Ł., and Polosukhin, I.
(2017). Attention is all you need. In Advances in
neural information processing systems, pages 5998–
6008.
Wang, Y., Sun, Y., Liu, Z., Sarma, S. E., Bronstein, M. M.,
and Solomon, J. M. (2019). Dynamic graph cnn
for learning on point clouds. Acm Transactions On
Graphics (tog), 38(5):1–12.
Wu, W., Qi, Z., and Li, F. (2019). Pointconv: Deep convo-
lutional networks on 3d point clouds. 2019 IEEE/CVF
Conference on Computer Vision and Pattern Recogni-
tion (CVPR), pages 9613–9622.
Wu, Z., Song, S., Khosla, A., Yu, F., Zhang, L., Tang, X.,
and Xiao, J. (2015). 3d shapenets: A deep represen-
tation for volumetric shapes. 2015 IEEE Conference
on Computer Vision and Pattern Recognition (CVPR),
pages 1912–1920.
Xu, D., Ouyang, W., Wang, X., and Sebe, N. (2018). Pad-
net: Multi-tasks guided prediction-and-distillation
network for simultaneous depth estimation and scene
parsing. 2018 IEEE/CVF Conference on Computer
Vision and Pattern Recognition, pages 675–684.
Zhang, Y. and Yang, Q. (2017). A survey on multi-task
learning. ArXiv, abs/1707.08114.
Zhao, H., Jiang, L., Jia, J., Torr, P. H. S., and Koltun, V.
(2020). Point transformer. ArXiv, abs/2012.09164.
Zhou, Q. and Jacobson, A. (2016). Thingi10k: A dataset of
10, 000 3d-printing models. ArXiv, abs/1605.04797.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
540
