
Evaluation of Induced Expert Knowledge in Causal Structure Learning
by NOTEARS
Jawad Chowdhury, Rezaur Rashid and Gabriel Terejanu
Dept. of Computer Science, University of North Carolina at Charlotte, Charlotte, NC, U.S.A.
Keywords:
Causality, Structured Prediction and Learning, Supervised Deep Learning, Optimization for Neural Networks.
Abstract:
Causal modeling provides us with powerful counterfactual reasoning and interventional mechanism to generate
predictions and reason under various what-if scenarios. However, causal discovery using observation data
remains a nontrivial task due to unobserved confounding factors, finite sampling, and changes in the data
distribution. These can lead to spurious cause-effect relationships. To mitigate these challenges in practice,
researchers augment causal learning with known causal relations. The goal of the paper is to study the impact
of expert knowledge on causal relations in the form of additional constraints used in the formulation of the
nonparametric NOTEARS. We provide a comprehensive set of comparative analyses of biasing the model
using different types of knowledge. We found that (i) knowledge that correct the mistakes of the NOTEARS
model can lead to statistically significant improvements, (ii) constraints on active edges have a larger positive
impact on causal discovery than inactive edges, and surprisingly, (iii) the induced knowledge does not correct
on average more incorrect active and/or inactive edges than expected. We also demonstrate the behavior of the
model and the effectiveness of domain knowledge on a real-world dataset.
1 INTRODUCTION
Machine learning models have been breaking records
in terms of achieving higher predictive accuracy.
Nevertheless, out-of-distribution (OOD) generaliza-
tion remains a challenge. One solution is adopting
causal structures (Lake et al., 2017) to constrain the
models and remove spurious correlations. The un-
derlying causal knowledge of the problem of inter-
est can significantly help with domain adaptability
and OOD generalization (Magliacane et al., 2017).
Furthermore, causal models go beyond the capability
of correlation-based models to produce predictions.
They provide us with the powerful counterfactual rea-
soning and interventional mechanism to reason under
various what-if scenarios (Pearl, 2009).
Two of the most prominent approaches in ob-
servational causal discovery are constraint-based and
score-based methods (Spirtes et al., 2000; Pearl and
Verma, 1995; Colombo et al., 2012; Chickering,
2002; Ramsey et al., 2017). Although these meth-
ods are quite robust if the underlying assumptions
are true, they are computationally expensive and their
computational complexity increases with the number
of system variables due to the combinatorial nature
of the DAG constraint. NOTEARS (Zheng et al.,
2018) tackles this problem with an algebraic char-
acterization of acyclicity which reduces the combi-
natorial problem to a continuous constrained opti-
mization. Different approaches (Yu et al., 2019;
Lachapelle et al., 2019; Ng et al., 2019; Zheng et al.,
2020) have been proposed as the nonlinear or non-
parametric extensions of this linear continuous opti-
mization, which provides flexibility in modeling dif-
ferent causal mechanisms.
Learning the causal structure purely based on ob-
servational data is not a trivial task due to various
limitations such as finite sampling, unobserved con-
founding factors, selection bias, and measurement er-
rors (Cooper, 1995; Elkan, 2001; Zadrozny, 2004).
These can result in spurious cause-effect relation-
ships. To mitigate these challenges in practice, re-
searchers augment causal learning with prior causal
relations as featured in software packages such as
CausalNex
1
, causal-learn
2
, bnlearn (Scutari, 2009),
gCastle (Zhang et al., 2021), and DoWhy (Sharma
and Kiciman, 2020). Heindorf et al. (Heindorf et al.,
2020) in their work attempts to construct the first large
scale open domain causality graph that can be in-
cluded in the existing knowledge bases. The work
further analyze and demonstrates the benefits of large
1
https://github.com/quantumblacklabs/causalnex
2
https://https://github.com/cmu-phil/causal-learn
136
Chowdhury, J., Rashid, R. and Terejanu, G.
Evaluation of Induced Expert Knowledge in Causal Structure Learning by NOTEARS.
DOI: 10.5220/0011716000003411
In Proceedings of the 12th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2023), pages 136-146
ISBN: 978-989-758-626-2; ISSN: 2184-4313
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

scale causality graph in causal reasoning. Given a
partial ancestral graph (PAG), representing the qual-
itative knowledge of the causal structure, Jaber et
al. (Jaber et al., 2018) in their study compute the inter-
ventional distribution from observational data. Com-
bining expert knowledge with structural learning fur-
ther constrains the search space minimizing the num-
ber of spurious mechanisms (Wei et al., 2020) and
researchers often leverage these background knowl-
edge by exploiting them as additional constraints
for knowledge-enhanced event causality identifica-
tion (Liu et al., 2021). O’Donnell et al. (O’Donnell
et al., 2006) use expert knowledge as prior probabili-
ties in learning Bayesian Network (BN) and Gencoglu
and Gruber (Gencoglu and Gruber, 2020) use the lin-
ear NOTEARS model to incorporate knowledge to
detect how different characteristics of the COVID-19
pandemic are causally related to each other. Differ-
ent experts’ causal judgments can be aggregated into
collective ones (Bradley et al., 2014) and Alrajeh et
al. (Alrajeh et al., 2020) in their work, studied how
these judgments can be combined to determine ef-
fective interventions. An interesting exploration by
Andrews et al. (Andrews et al., 2020) defines tiered
background knowledge and shows that with this type
of background knowledge the FCI algorithm (Spirtes
et al., 2000) is sound and complete.
However, understanding how to effectively incor-
porate and evaluating the impact of induced knowl-
edge is yet to be explored and we believe knowledge
regarding this can mitigate some of the challenges
of observational causal discovery. Human expertise
can play a vital role to assess the learned model in
causal structure learning (Bhattacharjya et al., 2021;
Li et al., 2021). In practice, human assessment and
validation process often take place in an iterative or
sequential manner (Holzinger, 2016; Xin et al., 2018;
Yang et al., 2019). In structure learning, this is more
realistic for a sufficiently large causal network where
one can learn, validate, and induce newly formed
knowledge-set in the learning process following se-
quential feedback loops. The goal of this paper is not
to create a new causal discovery algorithm but rather
to study this iterative interaction between prior causal
knowledge from domain experts that takes the form of
model constraints and a state-of-the-art causal struc-
ture learning algorithm. Wei et al. (Wei et al., 2020)
have been the first to augment NOTEARS with addi-
tional optimization constraints to satisfy the Karush-
Kuhn-Tucker (KKT) optimality conditions and Fang
et al. (Fang et al., 2020) in their work leverages the
low rank assumption in the context of causal DAG
learning by augmented NOTEARS that shows signif-
icant improvements. However, none of them have
studied the impact of induced knowledge on causal
structure learning by augmenting NOTEARS with the
optimization constraints. For completeness, in Sec-
tion 3, we do provide our formulation of nonparamet-
ric NOTEARS (Zheng et al., 2020) with functionality
to incorporate causal knowledge in the form of known
direct causal and non-causal relations. Nevertheless,
in this work, we aim to study the impact of expert
causal knowledge on causal structure learning.
The main contributions are summarized as fol-
lows. (1) We demonstrate an iterative modeling
framework to learn causal relations, impose causal
knowledge to constrain the causal graphs, and fur-
ther evaluate the model’s behavior and performance.
(2) We empirically evaluate and demonstrate that: (a)
knowledge that corrects model’s mistake can lead to
statistically significant improvements, (b) constraints
on active edges have a larger positive impact on causal
discovery than inactive edges, and (c) the induced
knowledge does not correct on average more incorrect
active and/or inactive edges than expected. Finally,
we illustrate the impact of additional knowledge in
causal discovery on a real-world dataset.
This paper is structured as follows: Section 2 in-
troduces the background on causal graphical models
(CGMs), score-based structure recovery methods, and
a study using the score-based approach formulated
as a continuous optimization and its recent nonpara-
metric extension. In Section 3, we present our ex-
tension of the nonparametric continuous optimization
to incorporate causal knowledge in structure learning
and detail the proposed knowledge induction process.
Section 4 shows the empirical evaluations and com-
parative analyses of the impact of expert knowledge
on the model’s performance. Finally, in Section 5, we
summarize our findings and provide a brief discussion
on future work.
2 BACKGROUND
In this section, we review the basic concepts related
to causal structure learning and briefly cover a recent
score-based continuous causal discovery approach us-
ing structural equation models (SEMs).
2.1 Causal Graphical Model (CGM)
A directed acyclic graph (DAG) is a directed graph
without any directed cyclic paths (Spirtes et al.,
2000). A causal graphical model CGM(P
X
, G) can
be defined as a pair of a graph G and an observa-
tional distribution P
X
over a set of random variables
X = (X
1
, . . . , X
d
). The distribution P
X
is Markovian
Evaluation of Induced Expert Knowledge in Causal Structure Learning by NOTEARS
137

with respect to G where G = (V, E) is a DAG that
encodes the causal structures among the random vari-
ables X
i
∈ X (Peters et al., 2017). The node i ∈ V
corresponds to the random variable X
i
∈ X and edges
(i, j) ∈ E correspond to the causal relations encoded
by G . In a causal graphical model, the joint distri-
bution P
x
can be factorized as p(x) =
∏
d
i=1
p(x
i
|x
G
pa
i
)
where X
G
pa
i
refers to the set of parents (direct causes)
for the variable X
i
in DAG G and for each X
j
∈ X
G
pa
i
there is an edge (X
j
→ X
i
) ∈ E (Peters et al., 2017).
2.2 Score-Based Structure Recovery
In a structure recovery method, given n i.i.d. obser-
vations in the data matrix X = [x
1
|. . . |x
d
] ∈ R
n×d
,
our goal is to learn the underlying causal relations
encoded by the DAG G. Most of the approaches fol-
low either a constraint-based or a score-based strategy
for observational causal discovery. A score-based ap-
proach typically concentrates on identifying the DAG
model G that fits the observed set of data X accord-
ing to some scoring criterion S(G, X) over the discrete
space of DAGs D where G ∈ D (Chickering, 2002).
The optimization problem for structure recovery in
this case can be defined as follows:
min
G
S(G, X)
subject to G ∈ D
(1)
The challenge with Eq. 1 is that the acyclicity con-
straint in the optimization is combinatorial in nature
and scales exponentially with the number of nodes d
in the graph. This makes the optimization problem
NP-hard (Chickering, 1996; Chickering et al., 2004).
2.3 NOTEARS: Continuous
Optimization for Structure
Learning
NOTEARS (Zheng et al., 2018) is a score-based
structure learning approach which reformulates the
combinatorial optimization problem to a continu-
ous one through an algebraic characterization of the
acyclicity constraint in Eq. 1 via trace exponen-
tial. This method encodes the graph G defined over
the d nodes to a weighted adjacency matrix W =
[w
1
|. . . |w
d
] ∈ R
d×d
where w
i j
̸= 0 if there is an ac-
tive edge X
i
→ X
j
and w
i j
= 0 if there is not. The
weighted adjacency matrix W entails a linear SEM by
X
i
= f
i
(X) + N
i
= w
T
i
X + N
i
; where N
i
is the associ-
ated noise. The authors define a smooth score func-
tion on the weighted matrix as h(W ) = tr(e
W ◦W
) − d
where ◦ is the Hadamard product and e
M
is the ma-
trix exponential of M. This embedding of the graph
G and the characterization of acyclicity turns the op-
timization in Eq. 1 into its equivalent:
min
W ∈R
d×d
L(W )
subject to h(W ) = 0
(2)
where L(W ) is the least square loss over W and h(W )
score defines the DAG-ness of the graph.
2.4 Nonparametric Extension of
NOTEARS
A nonparametric extension of the continuous opti-
mization suggested by a subsequent study (Zheng
et al., 2020) uses partial derivatives for asserting the
dependency of f
j
on the random variables. The au-
thors define f
j
∈ H
1
(R
d
) ⊂ L
2
(R
d
) over the Sobolev
space of square integrable functions whose deriva-
tives are also square integrable. The authors show
that f
j
can be independent of random variable X
i
if
and only if ||∂
i
f
j
||
L
2
= 0 where ∂
i
denotes partial
derivative with respect to the i-th variable. This re-
defines the weighted adjacency matrix with W ( f ) =
W ( f
1
, . . . , f
d
) ∈ R
d×d
where each W
i j
encodes the
partial dependency of f
j
on variable X
i
. As a result,
we can equivalently write Eq. 2 as follows:
min
f : f
j
∈H
1
(R
d
),∀ j∈[d]
L( f )
subject to h(W ( f )) = 0
(3)
for all X
j
∈ X. Two of the general instances pro-
posed by (Zheng et al., 2020) are: NOTEARS-
MLP and NOTEARS-Sob. A multilayer percep-
tron having h number of hidden layers and σ :
R → R activation function can be defined as
M(X; L) = σ(L
(h)
σ(. . . σ(L
(1)
X)) where L
(l)
denotes
the parameters associated with l-th hidden layer.
The authors in (Zheng et al., 2020) show that if
||i-th column of L
(1)
j
||
2
= 0 then M
j
(X;L) will be
independent of variable X
i
which replaces the as-
sociation of partial derivatives in Eq. 3 and rede-
fines the adjacency matrix as W (θ) with W (θ)
i j
=
||i-th column of L
(1)
j
||
2
where θ = (θ
1
, . . . , θ
d
); θ
k
de-
noting the set of parameters for the M
k
(X;L) (k-
th MLP). With the usage of neural networks and
the augmented Lagrangian method (Bertsekas, 1997)
NOTEARS-MLP solves the constrained problem in
Eq. 3 as follows:
min
θ
F(θ) + λ||θ||
1
F(θ) = L(θ) +
ρ
2
|h(W (θ))|
2
+ αh(W (θ))
(4)
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
138
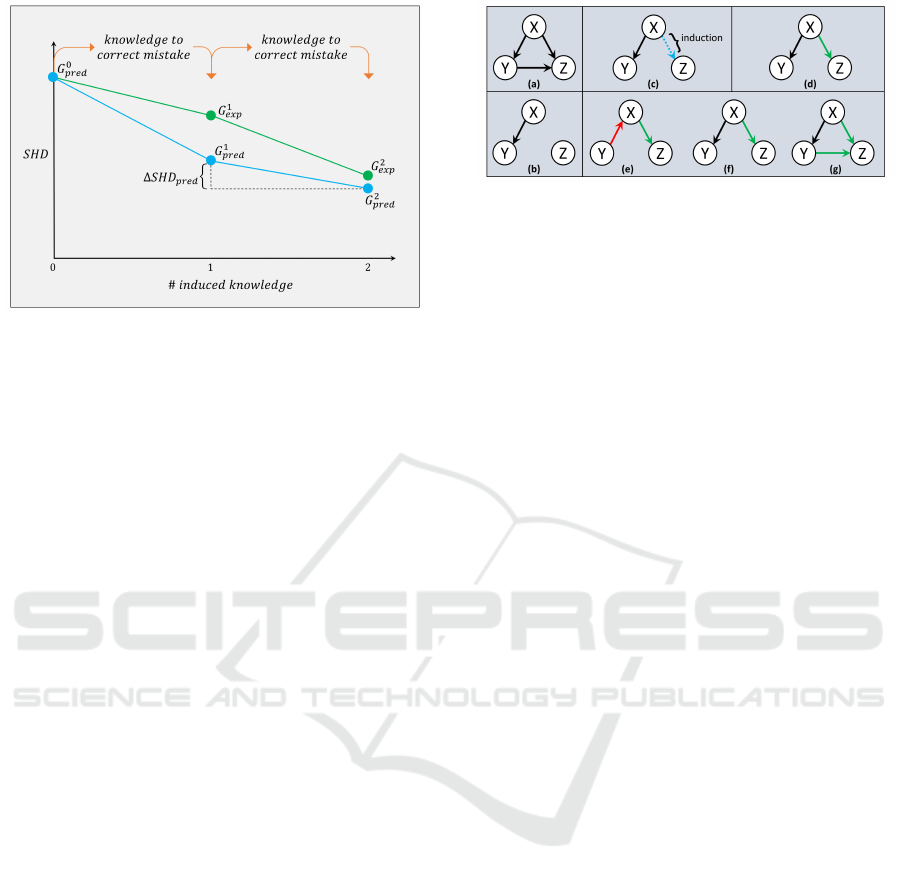
Figure 1: Knowledge induction process. We induce knowl-
edge by carrying over the existing knowledge set along with
a new random correction informed by model mistakes.
3 KNOWLEDGE INDUCTION
In our formulation, we use the multilayer perceptrons
of NOTEARS-MLP proposed by (Zheng et al., 2020)
as our estimators. We extend this framework to incor-
porate causal knowledge by characterizing the extra
information as additional constraints in the optimiza-
tion in Eq. 3.
Knowledge Type. We distinguish between these
two types of knowledge: (i) known inactive is knowl-
edge from the true inactive edges (absence of direct
causal relation), and (ii) known active is knowledge
from the true active edges (presence of direct causal
relation).
Knowledge Induction Process. We adopt an inter-
active induction process, where the expert knowledge
is informed by the outcome of the causal discovery
model. Namely, the knowledge is induced to correct
the mistakes of the model in the causal structure, in
the hope that the new structure is closer to the true
causal graph. This process is applied sequentially by
correcting the mistakes of the model at each step.
In the following subsections we present the formu-
lation of the NOTEARS optimization with constrains
and detail the sequential induction process.
3.1 Expert Knowledge as Constraints
An induced knowledge associated with a true ac-
tive edge, X
i
→ X
j
(known active) enforces the cor-
responding cell in the adjacency matrix to be non-
zero, [W (θ)]
i j
̸= 0. We consider this knowledge as
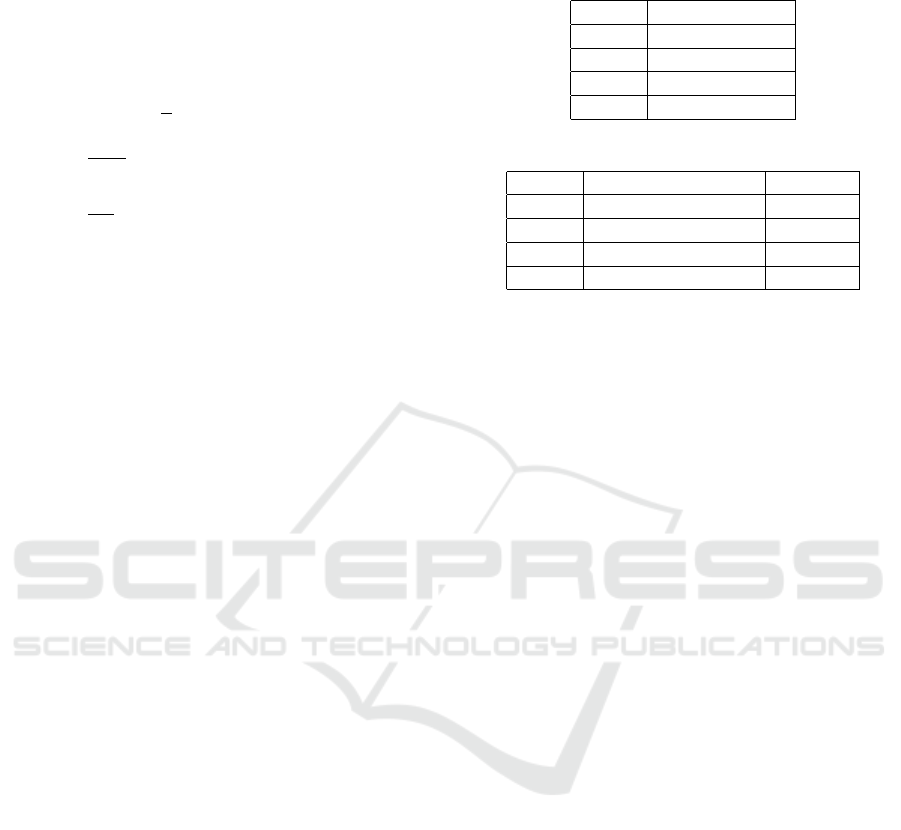
Figure 2: Expected graph formulation: (a) true graph, G
true
,
(b) predicted graph by model at step k, G
k
pred
, (c) induced
knowledge at step (k +1), (d) expected graph at step (k+1),
G
k+1
exp
. Three different examples of many possible predicted
graphs at step (k + 1), G
k+1
pred
where the model performs (e)
less than expectation, (f) par with expectation, and (g) more
than expectation.
inequality constraint in our extension of the optimiza-
tion such that the following statement holds:
h
p
ineq
(W (θ)) > 0
(5)
where p enumerates over all the inequality constraints
due to induction from the set of known active and
h
ineq
is the penalty score associated with the viola-
tion of these inequality constraints. On the other
hand, knowledge associated with true inactive edge,
X
i
↛ X
j
(known inactive) enforces the related cell in
W (θ) to be equal to zero, [W (θ)]
i j
= 0 if the induction
implies there should not be an edge from X
i
to X
j
. We
consider this knowledge as equality constraint in our
optimization such as:
h
q
eq
(W (θ)) = 0
(6)
where q enumerates over all the equality constraints,
induced from the set of known inactive and h
eq
is the
penalty score associated with the violation of these
equality constraints. With these additional constraints
in Eqs. 5, 6 we extend Eq. 3 to incorporate causal
knowledge in the optimization as follows:
min
f : f
j
∈H
1
(R
d
),∀ j∈[d]
L( f )
subject to h(W (θ)) = 0,
h
q
eq
(W (θ)) = 0,
h
p
ineq
(W (θ)) > 0
(7)
NOTEARS uses a thresholding step on the estimated
edge weights to reduce false discoveries by pruning
all the edges with weights falling below a certain
threshold. Because of this, in practice, even the equal-
ity constraints in Eq. 6 become inequalities to allow
for small weights. Finally, slack variables are intro-
duced in the implementation to transform the inequal-
ity constraints into equality constraints (see detailed
formulation in Appendix A).
Evaluation of Induced Expert Knowledge in Causal Structure Learning by NOTEARS
139
By using the similar strategy suggested by Zheng
et al. (Zheng et al., 2020) with augmented Lagrangian
method the reframed constrained optimization of
Eq. 4 takes the following form:
min
θ
F(θ) + λ||θ||
1
F(θ) = L(θ) +
ρ
2
|h(W (θ))|
2
+ αh(W (θ))
+
∑
p
(
ρ
ineq
2
|h
p
ineq
(W (θ))|
2
+ α
p
h
p
ineq
(W (θ)))
+
∑
q
(
ρ
eq
2
|h
q
eq
(W (θ))|
2
+ α
q
h
q
eq
(W (θ)))
(8)
3.2 Sequential Knowledge Induction
In case of knowledge induction, the optimization is
run in a sequential manner where the constraints are
informed by the causal mistakes made by the model
in the previous step. We start with our baseline model
without imposing any additional knowledge from the
true DAG and get the predicted causal graph denoted
by G
0
pred
in Figure 1. Then at each iterative step
(k + 1), based on the mistakes in the causal graph
G
k
pred
predicted by the NOTEARS-MLP, we select
one additional random piece of knowledge to correct
one of the mistakes, and add it to the set of con-
straints identified in the previous k steps, and rerun
NOTEARS. We note that a batch of corrections can
also be selected, however for this work we have fo-
cused on estimating the contribution of each piece of
knowledge in the form of known active/inactive edge.
Our observations are illustrated in Section 4.1, Sec-
tion 4.2, Section 4.3, and Section 4.4.
Expected Causal Graph. We consider the ex-
pected causal graph, G
k+1
exp
at step (k+1) by consider-
ing the case where all the knowledge has successfully
been induced without impacting any other edges. Fig-
ure 2d illustrates an example of how we formulate
our expected graph for a particular step in the itera-
tive process. We note that the correction might yield
a directed graph (Expected Causal Graph) that is not
necessary a DAG. The objective is to compare the
performance between the causal graph predicted by
NOTEARS and the expected causal graph. Our intu-
ition is that the induced knowledge will probably cor-
rect additional incorrect edges, see Figure 2g, yield-
ing a performance better than expected.
Table 1: Performance metrics considered with their corre-
sponding desirability.
Metric Desirability
∆FDR Lower is better
∆TPR Higher is better
∆FPR Lower is better
∆SHD Lower is better
Table 2: Results for inducing redundant knowledge.
Metric Mean ± Stderr. Remarks
∆FDR -0.00030 ± 0.00017 No harm
∆TPR -0.00035 ± 0.00027 No harm
∆FPR -0.00097 ± 0.00059 No harm
∆SHD -0.00154 ± 0.00167 No harm
4 EXPERIMENTS
To empirically evaluate the impact of additional
causal knowledge on causal learning and to keep our
experimental setup similar to the study in Ref. (Zheng
et al., 2020), we have used an MLP with 10 hid-
den units and sigmoid activation functions. In all our
experimental setup, we assume the prior knowledge
is correct (agrees with the true DAG). Despite the
known sensitivity of the NOTEARS algorithm to data
scaling, as demonstrated in previous study (Reisach
et al., 2021), we have conducted experiments using
both unscaled and scaled data to ensure the robustness
of our findings and we are pleased to report that our
conclusions remain unchanged regardless of the scal-
ing of the data, indicating the stability and reliability
of our results. While we present the results using the
unscaled data for consistency with the original imple-
mentation of NOTEARS (Zheng et al., 2020), it is
important to note that our conclusions hold true even
when the data is scaled.
Simulation. We investigate the performance of our
formulation and the impact of induced knowledge by
comparing the DAG estimates with the ground truths.
For our simulations with synthetic data, we have con-
sidered 16 different combinations following the sim-
ulation criteria: two random graph models, Erdos-
Renyi (ER) and Scale-Free (SF), number of nodes,
d = {10, 20}, sample size, n = {200, 1000}, edge
density, s0 = {1d, 4d}. For each of these combina-
tions, we have generated 10 different random graphs
or true DAGs (as 10 trials for a particular combina-
tion) and corresponding data by following nonlinear
data generating process with index models (similar
to the study in Ref. (Zheng et al., 2020) for which
the underlying true DAGs are identifiable. The results
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
140
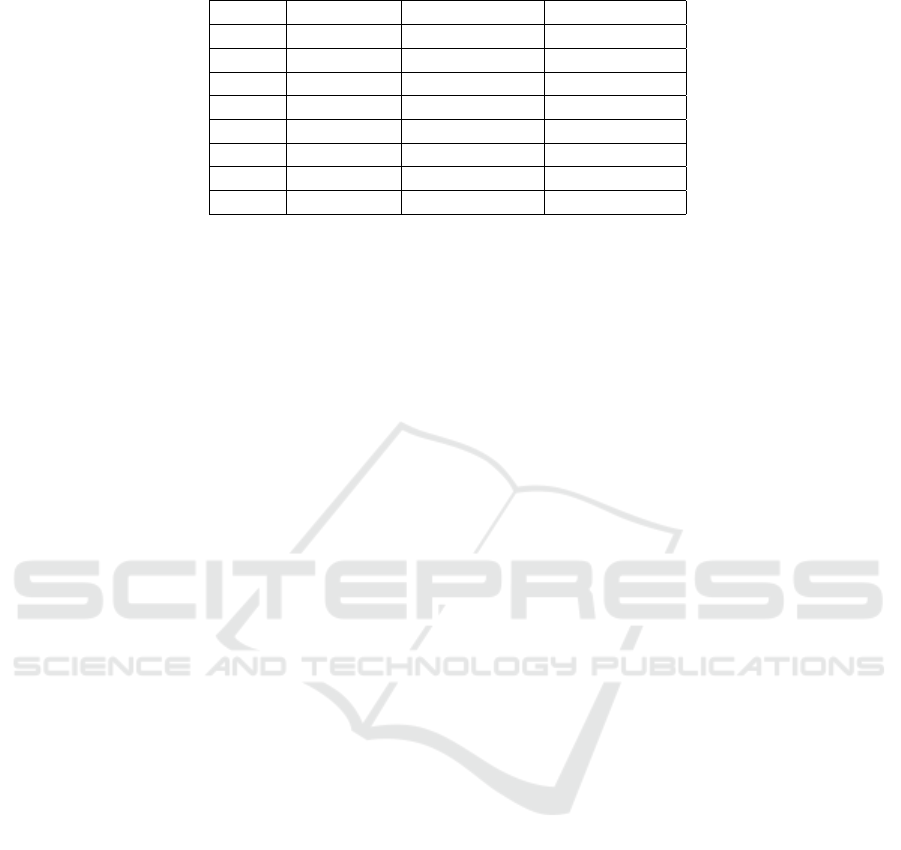
Table 3: Results for inducing knowledge that corrects model’s mistake.
Metric Knowledge Mean ± Stderr. Improvement
∆FDR inactive -0.018 ± 0.002 Significant
∆FDR active -0.008 ± 0.001 Significant
∆TPR inactive -0.007 ± 0.003 Not significant
∆TPR active 0.024 ± 0.003 Significant
∆FPR inactive -0.023 ± 0.004 Significant
∆FPR active -0.008 ± 0.003 Significant
∆SHD inactive -0.032 ± 0.012 Significant
∆SHD active -0.071 ± 0.011 Significant
are summarized over all these 160 random true DAGs
and datasets. In our simulations, we have considered
the regularization parameter, λ = 0.01. We evaluate
the performance of causal learning based on the mean
and the standard error of different metrics. For sta-
tistical significance analysis, we have used t-test with
α = 0.05 as the significance level.
Metrics. For the comparative analysis, we consider
the following performance metrics: False Discovery
Rate (FDR), True Positive Rate (TPR), False Posi-
tive Rate (FPR), and Structural Hamming Distance
(SHD). However, since we are evaluating the perfor-
mance over all these 160 random graphs of varying
sizes, we consider Structural Hamming Distance per
node (SHD/d) as our SHD measure that scales with
the number of nodes (FDR, TPR, and FPR scale by
definition). To evaluate the impact of induced knowl-
edge, we calculate the differences in the metrics at
different steps (where we have different sizes of in-
duced knowledge set) and referred them as ∆FDR,
∆TPR, ∆FPR, and ∆SHD, see also Table 1. For ex-
ample, based on our model’s prediction we calculate
the impact of inducing one additional piece of knowl-
edge on the metric SHD (∆SHD
pred
) as follows:
∆SHD
pred
= SHD(G
k+1
pred
) − SHD(G
k
pred
)
(9)
Sanity Check - Redundant Knowledge Does no
Harm. As part of our sanity check, we investigate
the impact of induced knowledge that matches the
causal relationships successfully discovered by the
NOTEARS-MLP. Therefore, in this section, we con-
sider the set of edges that our baseline model cor-
rectly classifies as our knowledge source. Here, we do
not distinguish between the edge types of our induced
knowledge (known inactive & active) since our goal
is to investigate whether having redundant knowl-
edge as additional constraints affects model’s perfor-
mance or not. The results are illustrated in Table 2.
Our empirical evaluation shows that adding redun-
dant knowledge does not deteriorate the performance
of NOTEARS-MLP. Our performed statistical test re-
flects that the results after inducing the knowledge
from the correctly classified edge set are not statis-
tically different than the results from the model with-
out these knowledge inductions. However, we have
noticed that the performance gets worse with highly
regularized models. This is consistent with observa-
tions by Ng et al. (Ng et al., 2020) where sparse DAGs
result in missing some of the true active edges.
4.1 Knowledge that Corrects Model’s
Mistake
We first investigate the role of randomly chosen
knowledge that corrects model’s mistake based on
the cause-effect relations of the true graph. There-
fore, in this case, we consider the set of misclassified
edges from the estimated causal graph as the knowl-
edge source for biasing the model. The results are
illustrated in Table 3. Our empirical result shows sta-
tistically significant improvements whenever the in-
duced knowledge corrects misclassified edges in the
estimated causal graph except for the case of ∆TPR
with known inactive edges. However, this behavior is
not totally unexpected since knowledge from known
inactive edges helps to get rid of false discoveries or
false positives, which hardly have impact on true pos-
itives.
4.2 Known Inactive vs Known Active
In this subsection, we are interested in understanding
the impact of different types of induced knowledge
on causal discovery to correct the mistakes in the es-
timated causal graph. As a result, the experimental
setup is similar to Section 4.1 where we consider the
misclassified edge set as the knowledge source. We
consider both known inactive and known active types
of knowledge to induce separately and analyze the
differences of their impact on the performance. The
results are illustrated in Table 4. Based on our statis-
tical test, we have found that inducing known inactive
is more effective when we compare the performance
Evaluation of Induced Expert Knowledge in Causal Structure Learning by NOTEARS
141
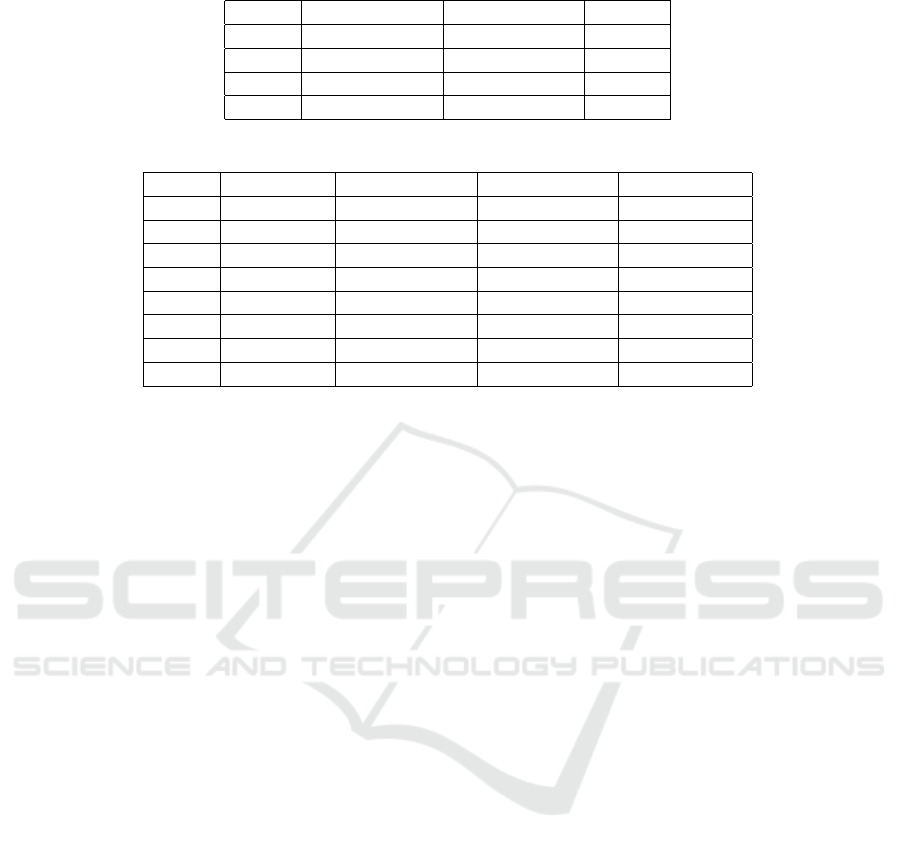
Table 4: Comparison between the impact of inducing knowledge regarding inactive vs active edges.
Metric Inactive Active Better
∆FDR -0.019 ± 0.002 -0.008 ± 0.001 inactive
∆TPR -0.007 ± 0.003 0.024 ± 0.003 active
∆FPR -0.023 ± 0.004 -0.009 ± 0.004 inactive
∆SHD -0.033 ± 0.013 -0.072 ± 0.011 active
Table 5: Comparison between the empirical performance vs expectation.
Metric Knowledge Empirical Expected Remarks
∆FDR inactive -0.019 ± 0.002 -0.016 ± 0.002 No difference
∆FDR active -0.008 ± 0.001 -0.006 ± 0.001 No difference
∆TPR inactive -0.007 ± 0.003 -0.002 ± 0.003 No difference
∆TPR active 0.024 ± 0.003 0.022 ± 0.002 No difference
∆FPR inactive -0.023 ± 0.004 -0.021 ± 0.004 No difference
∆FPR active -0.009 ± 0.003 -0.007 ± 0.003 No difference
∆SHD inactive -0.033 ± 0.013 -0.047 ± 0.010 No difference
∆SHD active -0.072 ± 0.011 -0.056 ± 0.010 No difference
based on FDR and FPR as misclassification of inac-
tive edges has more impact on these metrics. On the
other hand, the results show that inducing known ac-
tive is more effective on TPR as misclassification of
active edges has more impact on this metric. Inter-
estingly, we have found that known active provides a
significant improvement over known inactive in terms
of SHD. This can be attributed to the fact that the
induced knowledge based on the true inactive edge
(known inactive) between two random variables, i.e.
from X
i
to X
j
allows for two extra degrees of freedom
since it is still possible to have no edge at all or an ac-
tive edge from X
j
to X
i
. However, the induced knowl-
edge based on the true active edge doesn’t allow any
degrees of freedom. This type of knowledge is more
restraining for causal graph discovery and therefore
carries more information.
4.3 Empirical Performance vs
Expectation
In this subsection, we are interested in understand-
ing whether inducing knowledge to correct model’s
mistakes exceeds expected improvement. The ex-
perimental setup is similar to Section 4.1 and Sec-
tion 4.2 where we consider the misclassified edge set
as the knowledge source. We have conducted the ex-
periments using both known inactive and known ac-
tive types of knowledge separately. The expected
causal graph, G
exp
is formulated in a similar man-
ner described in Fig. 2. Table 5 shows the sum-
mary of the performance comparison in these cases
with the expected results. Our statistical test shows
that the induced correct knowledge does not cor-
rect on average more incorrect active and/or inactive
edges than expected. Therefore, using the informa-
tion from induced knowledge does not have addi-
tional impact than expected in the global optimiza-
tion scheme. However, this is likely due to the fact
that the structure of the expected causal graph, G
exp
is not well-posed. It’s worth noting that G
exp
isn’t
necessarily a DAG since there isn’t any constraining
mechanism to enforce acyclicity as compared to G
pred
(NOTEARS imposes hard acyclicity constaint in the
continuous optimization). Although it is to be noted
here that solving an acyclicity constrained optimiza-
tion problem does not guarantee to return a DAG and
Ng et al. (Ng et al., 2022) in their study illustrates on
this behavior and proposes the convergence guarantee
with a DAG solution.
4.4 Real Data
We evaluate the implication of incorporating expert
knowledge on the dataset from study in Ref. (Sachs
et al., 2005), which is largely used in the literature of
probabilistic graphical models with a consensus net-
work accepted by the biological community. This
dataset contains the expression levels of phosphory-
lated proteins and phospholipids in human cells under
different conditions. The dataset has d = 11 cell types
along with n = 7466 samples of expression levels. As
for the ground truth of the underlying causal graph,
we considered s
0
= 20 active edges as suggested by
the study (Sachs et al., 2005). We have opted for
∆TPR, the percentage difference of edges in agree-
ment (higher is better), and the percentage difference
of reversed edges (lower is better) as the evaluation
metrics since the performance on these metrics would
indicate the significance more distinctively. Similar
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
142

to the synthetic data analysis, we had 10 trials that
we used to summarize our evaluation. Our empiri-
cal result (Mean ± Stderr.) shows: ∆TPR as 0.020
± 0.004, the percentage difference of edges in agree-
ment as 0.393 ± 0.086, and the percentage difference
of reversed edges as -0.073 ± 0.030. We have found
that with the help of induced knowledge the model
shows statistically significant improvement by cor-
rectly identifying more active edges and by reducing
the number of edges identified in the reverse direc-
tion. Due to the limitation of having access only to a
subset of the true active edges, our analyses could not
include a comparative study on known inactive edges
as in the synthetic data case. We assume the perfor-
mance could have been improved by fine-tuning the
model’s parameters but since our main focus of this
study is entirely based on the analyses regarding the
impact of induced knowledge of different types and
from different sources on structure learning, we kept
the parameter setup similar for all consecutive steps
in the knowledge induction process.
5 CONCLUSIONS
We have studied the impact of expert causal knowl-
edge on causal structure learning and provided a set
of comparative analyses of biasing the model using
different types of knowledge. Our findings show that
knowledge that corrects model’s mistakes yields sig-
nificant improvements and it does no harm even in the
case of redundant knowledge that results in redundant
constraints. This suggest that the practitioners should
consider incorporating domain knowledge whenever
available. More importantly, we have found that
knowledge related to active edges has a larger positive
impact on causal discovery than knowledge related to
inactive edges which can mostly be attributed to the
difference between the number of degrees of freedom
each case reduces. This finding suggest that the prac-
titioners may want to prioritize incorporating knowl-
edge regarding presence of an edge whenever appli-
cable. Furthermore, our experimental analysis shows
that the induced knowledge does not correct on av-
erage more incorrect active and/or inactive edges than
expected. This finding is rather surprising to us, as we
have expected that every constraint based on a known
active/inactive edge to impact and correct more than
one edge on average.
Our work points to the importance of the human-
in-the-loop in causal discovery that we would like to
further explore in our future studies. Also, we would
like to mention that in our study we adopted hard con-
straints to accommodate the prior knowledge since we
have assumed our priors to be correct. An interesting
future direction would be to accommodate the contin-
uous optimization with functionality to allow differ-
ent levels of confidence on the priors.
ACKNOWLEDGEMENTS
Research was sponsored by the Army Research Of-
fice and was accomplished under Grant Number
W911NF-22-1-0035. The views and conclusions con-
tained in this document are those of the authors and
should not be interpreted as representing the official
policies, either expressed or implied, of the Army
Research Office or the U.S. Government. The U.S.
Government is authorized to reproduce and distribute
reprints for Government purposes notwithstanding
any copyright notation herein.
REFERENCES
Alrajeh, D., Chockler, H., and Halpern, J. Y. (2020). Com-
bining experts’ causal judgments. Artificial Intelli-
gence, 288:103355.
Andrews, B., Spirtes, P., and Cooper, G. F. (2020). On the
completeness of causal discovery in the presence of la-
tent confounding with tiered background knowledge.
In International Conference on Artificial Intelligence
and Statistics, pages 4002–4011. PMLR.
Bertsekas, D. P. (1997). Nonlinear programming. Journal
of the Operational Research Society, 48(3):334–334.
Bhattacharjya, D., Gao, T., Mattei, N., and Subramanian, D.
(2021). Cause-effect association between event pairs
in event datasets. In Proceedings of the Twenty-Ninth
International Conference on International Joint Con-
ferences on Artificial Intelligence, pages 1202–1208.
Bradley, R., Dietrich, F., and List, C. (2014). Aggregating
causal judgments. Philosophy of Science, 81(4):491–
515.
Chickering, D. M. (1996). Learning Bayesian networks is
NP-complete. In Learning from data, pages 121–130.
Springer.
Chickering, D. M. (2002). Optimal structure identification
with greedy search. Journal of machine learning re-
search, 3(Nov):507–554.
Chickering, M., Heckerman, D., and Meek, C. (2004).
Large-sample learning of Bayesian networks is NP-
hard. Journal of Machine Learning Research, 5.
Colombo, D., Maathuis, M. H., Kalisch, M., and Richard-
son, T. S. (2012). Learning high-dimensional directed
acyclic graphs with latent and selection variables. The
Annals of Statistics, pages 294–321.
Cooper, G. (1995). Causal discovery from data in the pres-
ence of selection bias. In Proceedings of the Fifth
International Workshop on Artificial Intelligence and
Statistics, pages 140–150.
Evaluation of Induced Expert Knowledge in Causal Structure Learning by NOTEARS
143

Elkan, C. (2001). The foundations of cost-sensitive learn-
ing. In International joint conference on artificial in-
telligence, volume 17, pages 973–978. Lawrence Erl-
baum Associates Ltd.
Fang, Z., Zhu, S., Zhang, J., Liu, Y., Chen, Z., and He, Y.
(2020). Low rank directed acyclic graphs and causal
structure learning. arXiv preprint arXiv:2006.05691.
Gencoglu, O. and Gruber, M. (2020). Causal modeling
of twitter activity during Covid-19. Computation,
8(4):85.
Heindorf, S., Scholten, Y., Wachsmuth, H.,
Ngonga Ngomo, A.-C., and Potthast, M. (2020).
Causenet: Towards a causality graph extracted from
the web. In Proceedings of the 29th ACM Inter-
national Conference on Information & Knowledge
Management, pages 3023–3030.
Holzinger, A. (2016). Interactive machine learning for
health informatics: when do we need the human-in-
the-loop? Brain Informatics, 3(2):119–131.
Jaber, A., Zhang, J., and Bareinboim, E. (2018). Causal
identification under Markov equivalence. arXiv
preprint arXiv:1812.06209.
Lachapelle, S., Brouillard, P., Deleu, T., and Lacoste-Julien,
S. (2019). Gradient-based neural DAG learning. arXiv
preprint arXiv:1906.02226.
Lake, B. M., Ullman, T. D., Tenenbaum, J. B., and Gersh-
man, S. J. (2017). Building machines that learn and
think like people. Behavioral and brain sciences, 40.
Li, Z., Ding, X., Liu, T., Hu, J. E., and Van Durme, B.
(2021). Guided generation of cause and effect. arXiv
preprint arXiv:2107.09846.
Liu, J., Chen, Y., and Zhao, J. (2021). Knowledge enhanced
event causality identification with mention masking
generalizations. In Proceedings of the Twenty-Ninth
International Conference on International Joint Con-
ferences on Artificial Intelligence, pages 3608–3614.
Magliacane, S., van Ommen, T., Claassen, T., Bongers,
S., Versteeg, P., and Mooij, J. M. (2017). Do-
main adaptation by using causal inference to pre-
dict invariant conditional distributions. arXiv preprint
arXiv:1707.06422.
Ng, I., Fang, Z., Zhu, S., Chen, Z., and Wang, J.
(2019). Masked gradient-based causal structure learn-
ing. arXiv preprint arXiv:1910.08527.
Ng, I., Ghassami, A., and Zhang, K. (2020). On the role
of sparsity and DAG constraints for learning linear
DAGs. arXiv preprint arXiv:2006.10201.
Ng, I., Lachapelle, S., Ke, N. R., Lacoste-Julien, S., and
Zhang, K. (2022). On the convergence of continuous
constrained optimization for structure learning. In In-
ternational Conference on Artificial Intelligence and
Statistics, pages 8176–8198. PMLR.
O’Donnell, R. T., Nicholson, A. E., Han, B., Korb, K. B.,
Alam, M. J., and Hope, L. R. (2006). Causal discov-
ery with prior information. In Australasian Joint Con-
ference on Artificial Intelligence, pages 1162–1167.
Springer.
Pearl, J. (2009). Causality. Cambridge university press.
Pearl, J. and Verma, T. S. (1995). A theory of inferred cau-
sation. In Studies in Logic and the Foundations of
Mathematics, volume 134, pages 789–811. Elsevier.
Peters, J., Janzing, D., and Sch
¨
olkopf, B. (2017). Elements
of causal inference: foundations and learning algo-
rithms. The MIT Press.
Ramsey, J., Glymour, M., Sanchez-Romero, R., and Gly-
mour, C. (2017). A million variables and more: the
Fast Greedy Equivalence Search algorithm for learn-
ing high-dimensional graphical causal models, with
an application to functional magnetic resonance im-
ages. International journal of data science and ana-
lytics, 3(2):121–129.
Reisach, A., Seiler, C., and Weichwald, S. (2021). Beware
of the simulated dag! causal discovery benchmarks
may be easy to game. Advances in Neural Information
Processing Systems, 34:27772–27784.
Sachs, K., Perez, O., Pe’er, D., Lauffenburger, D. A., and
Nolan, G. P. (2005). Causal protein-signaling net-
works derived from multiparameter single-cell data.
Science, 308(5721):523–529.
Scutari, M. (2009). Learning bayesian networks with the
bnlearn r package. arXiv preprint arXiv:0908.3817.
Sharma, A. and Kiciman, E. (2020). Dowhy: An end-
to-end library for causal inference. arXiv preprint
arXiv:2011.04216.
Spirtes, P., Glymour, C. N., Scheines, R., and Heckerman,
D. (2000). Causation, prediction, and search. MIT
press.
Wei, D., Gao, T., and Yu, Y. (2020). Dags with no fears:
A closer look at continuous optimization for learning
bayesian networks. arXiv preprint arXiv:2010.09133.
Xin, D., Ma, L., Liu, J., Macke, S., Song, S., and
Parameswaran, A. (2018). Accelerating human-in-
the-loop machine learning: Challenges and opportu-
nities. In Proceedings of the second workshop on data
management for end-to-end machine learning, pages
1–4.
Yang, Y., Kandogan, E., Li, Y., Sen, P., and Lasecki, W. S.
(2019). A study on interaction in human-in-the-loop
machine learning for text analytics. In IUI Workshops.
Yu, Y., Chen, J., Gao, T., and Yu, M. (2019). DAG-GNN:
DAG structure learning with graph neural networks.
In International Conference on Machine Learning,
pages 7154–7163. PMLR.
Zadrozny, B. (2004). Learning and evaluating classi-
fiers under sample selection bias. In Proceedings of
the twenty-first international conference on Machine
learning, page 114.
Zhang, K., Zhu, S., Kalander, M., Ng, I., Ye, J., Chen, Z.,
and Pan, L. (2021). gcastle: A python toolbox for
causal discovery. arXiv preprint arXiv:2111.15155.
Zheng, X., Aragam, B., Ravikumar, P., and Xing, E. P.
(2018). DAGs with no tears: Continuous op-
timization for structure learning. arXiv preprint
arXiv:1803.01422.
Zheng, X., Dan, C., Aragam, B., Ravikumar, P., and Xing,
E. (2020). Learning sparse nonparametric DAGs.
In International Conference on Artificial Intelligence
and Statistics, pages 3414–3425. PMLR.
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
144
APPENDIX
We illustrate here the detailed performance with sum-
mary statistics of induced knowledge from our em-
pirical evaluation (∆FDR, ∆TPR, ∆FPR, and ∆SHD
for both ∆=1 and ∆=2). Similar to one additional
knowledge (∆=1), we calculate the impact of induc-
ing two additional piece of knowledge (∆=2) based
on our model’s prediction i.e. on the metric SHD
(∆SHD
2
pred
) as follows:
∆SHD
2
pred
= SHD(G
k+2
pred
) − SHD(G
k
pred
)
(10)
Table 6 shows the results for inducing redundant
knowledge or knowledge that is correctly classified
by NOTEARS-MLP.
A. Threshold Incorporation and Slack Variables.
In Eq. 5, we have seen that our inequality constraint
takes the following form:
h
p
ineq
(W (θ)) > 0
where p enumerates over each induced knowledge as-
sociated with true active edge (known active) X
i
→ X
j
imposing [W (θ)]
i j
̸= 0. NOTEARS uses a threshold-
ing step that reduces false discoveries where any edge
weight below the threshold value, w
thresh
in its ab-
solute value is set to zero. Thus, for any induction
from true active edges (X
i
→ X
j
) we have the follow-
ing constraint:
[W (θ)]
2
i j
≥ W
2
thresh
.
We convert inequality constraints in our optimization
to equality by introducing a set of slack variables y
p
such that:
− [W (θ)]
2
i j
+W
2
thresh
+ y
p
= 0 s.t. y
p
≥ 0
(11)
In a similar manner, using the threshold value,
W
thresh
our equality constraints (associated with
known inactive edges) take the form as:
[W (θ)]
2
i j
−W
2
thresh
+ y
q
= 0 s.t. y
q
≥ 0
(12)
where q enumerates over each induction asso-
ciated with true inactive edge X
i
↛ X
j
imposing
[W (θ)]
i j
= 0.
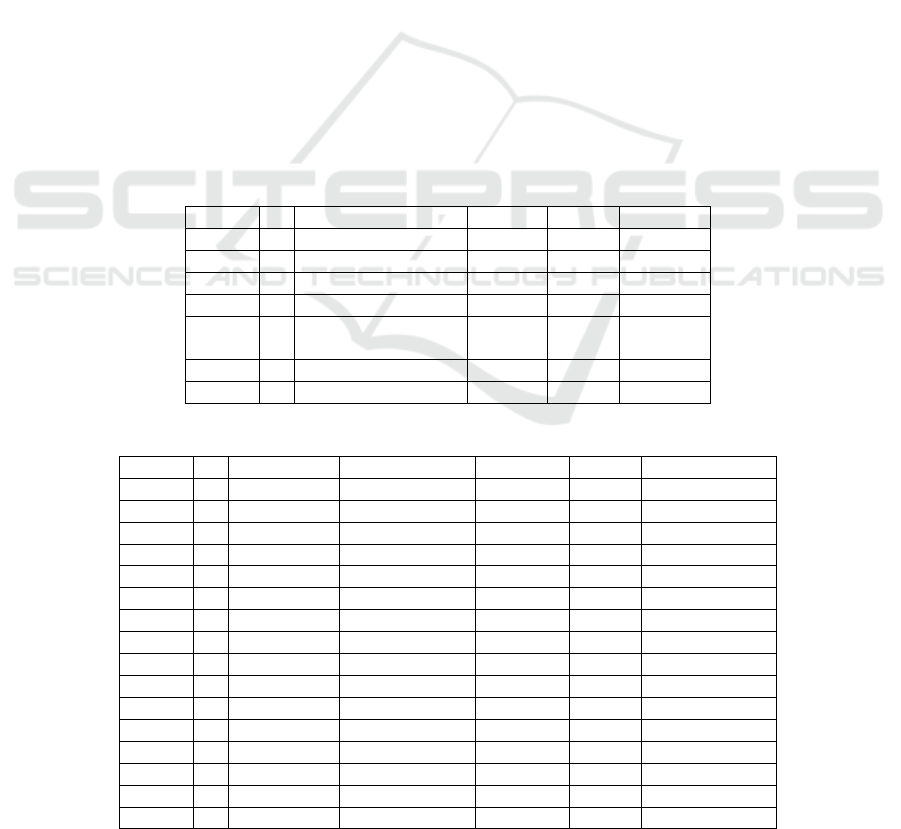
B. Additional Results and Summary Statistics.
Table 7 shows the detailed results for inducing knowl-
edge that corrects model’s mistake. Table 8 shows the
Table 6: Full results for inducing redundant knowledge (Sanity Check).
Metric ∆ Mean ± Stderr. p-value t-stat Remarks
∆FDR 1 -0.00030 ± 0.00017 0.076 -1.770 No harm
∆FDR 2 -0.00060 ± 0.00021 0.004 -2.850 No harm
∆TPR 1 -0.00035 ± 0.00027 0.205 -1.260 No harm
∆TPR 2 -0.00036 ± 0.00029 0.227 -1.210 No harm
∆FPR 1 -0.00097 ± 0.00059 0.100 -1.630 No harm
∆FPR 2 -0.00183 ± 0.00069 0.008 -2.660 No harm
∆SHD 1 -0.00154 ± 0.00167 0.356 -0.920 No harm
∆SHD 2 -0.00357 ± 0.00188 0.050 -1.900 No harm
Table 7: Full results for inducing knowledge that corrects model’s mistake (Section 4.1).
Metric ∆ Knowledge Mean ± Stderr. p-value t-stat Improvement
∆FDR 1 inactive -0.018, 0.002 3.41E-14 -7.800 Significant
∆FDR 1 active -0.008, 0.001 2.51E-08 -5.657 Significant
∆FDR 2 inactive -0.023, 0.003 2.74E-15 -8.221 Significant
∆FDR 2 active -0.011, 0.002 9.06E-08 -5.448 Significant
∆TPR 1 inactive -0.007, 0.003 3.10E-02 -2.164 Not significant
∆TPR 1 active 0.024, 0.003 8.58E-19 9.191 Significant
∆TPR 2 inactive -0.001, 0.003 8.25E-01 -0.222 Not significant
∆TPR 2 active 0.035, 0.004 1.16E-19 9.580 Significant
∆FPR 1 inactive -0.023, 0.004 3.81E-08 -5.583 Significant
∆FPR 1 active -0.008, 0.003 1.21E-02 -2.517 Significant
∆FPR 2 inactive -0.021, 0.003 1.04E-08 -5.845 Significant
∆FPR 2 active -0.015, 0.005 6.73E-03 -2.724 Significant
∆SHD 1 inactive -0.032, 0.012 9.74E-03 -2.594 Significant
∆SHD 1 active -0.071, 0.011 1.61E-10 -6.522 Significant
∆SHD 2 inactive -0.082, 0.012 1.93E-10 -6.533 Significant
∆SHD 2 active -0.126, 0.016 3.41E-14 -7.875 Significant
Evaluation of Induced Expert Knowledge in Causal Structure Learning by NOTEARS
145
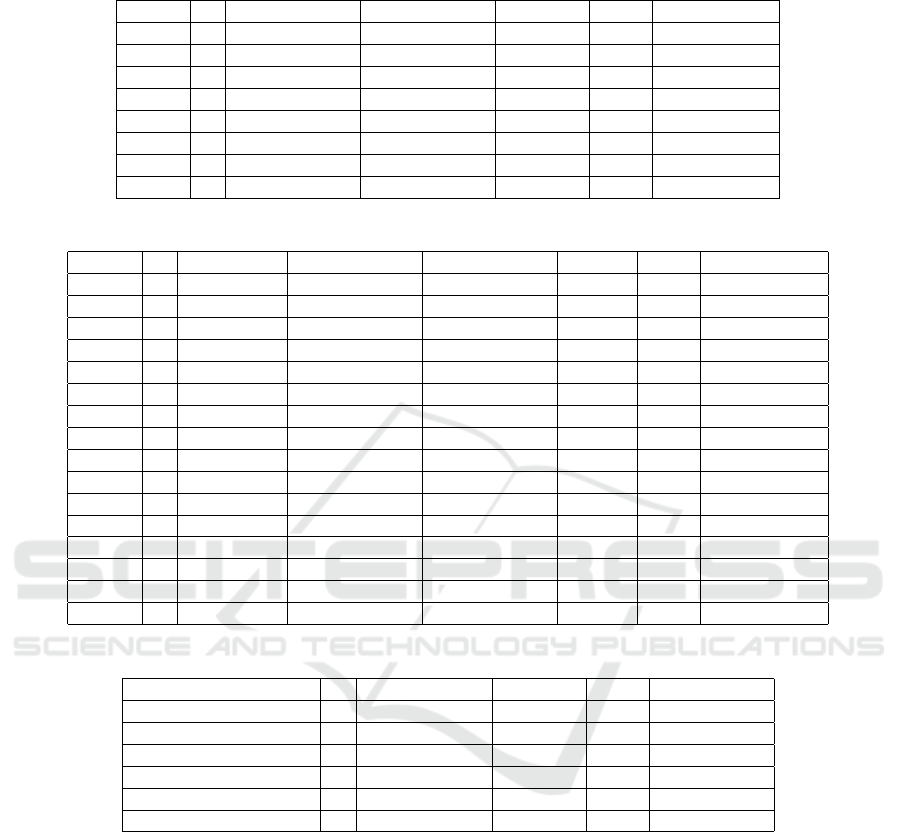
Table 8: Full results of comparison between the impact of inducing knowledge regarding inactive vs active edges. (Sec-
tion 4.2).
Metric ∆ Inactive Active p-value t-stat Better
∆FDR 1 -0.019 ± 0.002 -0.008 ± 0.001 1.30E-04 -3.85 Inactive
∆FDR 2 -0.023 ± 0.002 -0.011 ± 0.001 5.58E-04 -3.47 Inactive
∆TPR 1 -0.007 ± 0.003 0.024 ± 0.003 8.13E-14 -7.57 Active
∆TPR 2 -0.001 ± 0.003 0.035 ± 0.004 2.84E-13 -7.43 Active
∆FPR 1 -0.023 ± 0.004 -0.009 ± 0.004 7.28E-03 -2.69 Inactive
∆FPR 2 -0.021 ± 0.004 -0.015 ± 0.005 3.23E-01 -0.99 No difference
∆SHD 1 -0.033 ± 0.013 -0.072 ± 0.011 1.90E-02 2.35 Active
∆SHD 2 -0.082 ± 0.013 -0.126 ± 0.016 3.28E-02 2.14 Active
Table 9: Full results of comparison between the empirical performance vs expectation (Section 4.3).
Metric ∆ Knowledge Empirical Expected p-value t-stat Remarks
∆FDR 1 inactive -0.019 ± 0.002 -0.016 ± 0.002 0.51 -0.65 No difference
∆FDR 1 active -0.008 ± 0.001 -0.006 ± 0.001 0.21 -1.25 No difference
∆FDR 2 inactive -0.023 ± 0.002 -0.025 ± 0.002 0.60 0.53 No difference
∆FDR 2 active -0.011 ± 0.002 -0.010 ± 0.002 0.75 -0.32 No difference
∆TPR 1 inactive -0.007 ± 0.003 -0.002 ± 0.003 0.22 -1.23 No difference
∆TPR 1 active 0.024 ± 0.003 0.022 ± 0.002 0.48 0.70 No difference
∆TPR 2 inactive -0.001 ± 0.003 -0.006 ± 0.003 0.24 1.17 No difference
∆TPR 2 active 0.035 ± 0.004 0.028 ± 0.004 0.18 1.34 No difference
∆FPR 1 inactive -0.023 ± 0.004 -0.021 ± 0.004 0.62 -0.50 No difference
∆FPR 1 active -0.009 ± 0.003 -0.007 ± 0.003 0.79 -0.27 No difference
∆FPR 2 inactive -0.021 ± 0.004 -0.030 ± 0.005 0.18 1.34 No difference
∆FPR 2 active -0.015 ± 0.005 -0.018 ± 0.005 0.61 0.51 No difference
∆SHD 1 inactive -0.033 ± 0.013 -0.047 ± 0.010 0.36 0.91 No difference
∆SHD 1 active -0.072 ± 0.011 -0.056 ± 0.010 0.30 -1.04 No difference
∆SHD 2 inactive -0.082 ± 0.013 -0.086 ± 0.013 0.82 0.23 No difference
∆SHD 2 active -0.126 ± 0.016 -0.100 ± 0.017 0.28 -1.09 No difference
Table 10: Full results for inducing knowledge in real data (Section 4.4).
Metric ∆ Mean ± Stderr. p-value t-stat Remarks
∆TPR 1 0.020 ± 0.004 8.10E-06 4.60 Improvement
∆TPR 2 0.036 ± 0.005 1.77E-12 7.62 Improvement
∆ % edge in agreement 1 0.393 ± 0.086 8.10E-06 4.60 Improvement
∆ % edge in agreement 2 0.714 ± 0.094 1.77E-12 7.62 Improvement
∆ % edge reversed 1 -0.073 ± 0.030 1.54E-02 -2.45 Improvement
∆ % edge reversed 2 -0.107 ± 0.033 1.29E-03 -3.27 Improvement
detailed results of the difference between the impact
of ‘known inactive’ (knowledge induced from inac-
tive edges) and ‘known active’ (knowledge induced
from active edges) using misclassified edge set as the
knowledge source. Table 9 shows the detailed re-
sults of the difference between empirical improve-
ments due to knowledge induction vs expected out-
comes using misclassified edge set as the knowledge
source. Table 10 shows the detailed results for induc-
ing knowledge on the real dataset (from (Sachs et al.,
2005)).
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
146
