
Analysis of Wettability Model Using Adhesional and Spreading Works
Nobuhiko Mukai
1,2 a
, Takuya Natsume
1
, Masamichi Oishi
2
and Marie Oshima
2,3
1
Graduate School of Integrative Science and Engineering, Tokyo City University, 1-28-1 Tamazutsumi, Setagaya,
Tokyo 158-8557, Japan
2
Institute of Industrial Science, The University of Tokyo, 4-6-1 Komaba, Meguro, Tokyo 153-8505, Japan
3
Initiative in Information Industries, The University of Tokyo, 7-3-1 Hongo, Bunkyo, Tokyo 113-8654, Japan
Keywords:
Fluid Dynamics, Particle Method, Wettability, Contact Angle, Adhesional Work, Spreading Work.
Abstract:
We have developed a new method of wettability, which is a feature for a liquid to keep the contact angle formed
between a liquid and a solid body. Conventional models required the contact angle in advance for simulations,
which angle can be measured by physical experiments. On the other hand, our new model does not need the
contact angle and forms the shape of liquid on a solid body by considering adhesional and spreading works.
We demonstrated that the proposed method was able to represent wettability by simulations without contact
angles. This paper evaluates the proposed method by investigating the drop time of the liquid extruded from a
thin tube.
1 INTRODUCTION
Liquid simulation is a very challenging issue since
it deforms dynamically and the topology changes all
the time with the separation and integration of many
small molecules. The simulation where one kind of
liquid drops in the air is relatively simple because the
air is usually ignored and the simulation can be per-
formed by considering just one type of liquid. On the
other hand, the simulation where two kinds of liquid
should be treated is very complex and difficult to per-
form.
One example is the simulation of an emboliza-
tion material dropped in the cerebral aneurysm. In
this case, two different kinds of liquid, which are em-
bolization material and blood, should be considered
in the simulation, and the interfacial tension works on
the boundary between the two materials. The inter-
facial tension is different from free surface tension,
which works between liquid and air that can be usu-
ally ignored.
For fluid simulations, two types of methods are
usually used: grid-based Euler method and particle-
based Lagrangian one. Grid-based Euler methods can
perform simulations for large spaces, however, it is
difficult to treat the interfacial tension that works on
the boundary of two different kinds of fluid. On the
other hand, particle-based Lagrangian ones can eas-
a
https://orcid.org/0000-0001-8909-9454
ily detect the boundary of two different kinds of fluid
and can treat the topological change; however, the cal-
culation accuracy is relatively low since it does not
consider some particles that are outside of a constant
range for the calculation.
For the safety verification of a new embolization
method for a cerebral aneurysm, we have been trying
to simulate the behavior of a droplet that is ejected
from a thin tube, which is a real catheter, into a
water tank, which imitates a cerebral aneurysm, us-
ing the MPS (Moving Particle Semi-implicit) method
that is one of the particle methods and was devel-
oped for incompressive fluid. We have also evaluated
our method by the comparison between the simula-
tion results and the physical experiments. The method
considered the effect of liquid-liquid two-phase flow;
however, the droplet that came out of the catheter did
not adhere to the edge of the catheter because we did
not consider wettability.
To simulate wettability, which is a feature for a
liquid to keep the contact angle between the liquid
and the solid body, the contact angle is necessary
and it can be measured by physical experiments. It
means that we cannot perform the simulation unless
the contact angle is known, which is decided depend-
ing on the physical features of two materials: liquid
and solid.
Then, we developed a new wettability method that
does not need the contact angle between a liquid and a
230
Mukai, N., Natsume, T., Oishi, M. and Oshima, M.
Analysis of Wettability Model Using Adhesional and Spreading Works.
DOI: 10.5220/0011710100003417
In Proceedings of the 18th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2023) - Volume 1: GRAPP, pages
230-236
ISBN: 978-989-758-634-7; ISSN: 2184-4321
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

solid and succeeded in representing wettability. How-
ever, we have not evaluated the method for the drop
time of liquid by the comparison between the simu-
lation results and the physical experiment. Therefore,
this paper reports the evaluation of the new wettabil-
ity method for the drop time of liquid. The maximal
merit of our method is that it can represent wettability
without contact angles, which must have be measured
before simulations in the conventional methods. The
proposed method can visualize wettability of a liquid
on a solid body not by estimating the contact angle
but by changing the liquid shape with adhesional and
spreading works, which operate between liquid and
solid body.
2 RELATED WORKS
For fluid simulations, mainly two types of methods
are usually used: the grid-based Euler method and the
particle-based Lagrangian one. The grid-based Eu-
ler method calculates physical features such as den-
sity and velocity of fluid at fixed positions. Then,
it requires a lot of memories for simulations and it
is difficult to determine the boundary where multiple
fluids contact. On the other hand, the particle-based
Lagrangian one simulates physical phenomena using
many particles, and it can easily determine the bound-
ary between different types of particles, but, the cal-
culation accuracy is relatively low because it does not
consider some particles outside of a constant range
for the calculation. For the simulation of liquid em-
bolization, particle-based methods are more suitable
since they can treat the topological change and can
calculate the interfacial tension on the boundary be-
tween two kinds of materials.
In general, two major particle methods are used
depending on the purpose of the simulation: One is
the SPH (Smoothed Particle Hydrodynamics) method
that was developed by (Gingold and Monaghan,
1997) for compressive fluid, and the other is the MPS
method that was developed by (Koshizuka and Oka,
1996) for incompressive one.
For the simulation of a droplet that is ejected from
a thin tube, force balance should be considered. The
droplet drops when the gravitational force becomes
more than the attractive force caused by the interfa-
cial tension. Two kinds of models are usually used for
interfacial tension calculation. One is the CSF (Con-
tinuum Surface Force) model developed by (Brack-
bill et al., 1992), and the other is a potential energy
model. (Morris, 2000) applied the CSF to the in-
terfacial model of the SPH method, while (Nomura
et al., 2001) used the CSF to the MPS method. On
the other hand, (Tartakovsky and Meakin, 2005) uti-
lized the potential energy model for the SPH method,
while (Shirakawa et al., 2001) proposed an interfacial
tension model based on potential energy for the MPS
method.
Wettability is caused by the attractive force that
works to support the droplet against the gravitational
force. (Wang et al., 2005) proposed a wettabil-
ity model with a level set method, while (Zhang
et al., 2012) established the model by using a mesh
method. They both represented a droplet with wetta-
bility, where the liquid adheres to a solid body.
In addition, (Akinci et al., 2013) proposed a
method considering adhesional wetting, while (Yang
et al., 2016) investigated another model with poten-
tial energy by considering the interaction between liq-
uid and air. (Hattori and Kohizuka, 2019) also repre-
sented a droplet that slides down on a slope by using
potential energy and the MPS method.
(Natsume et al., 2019b) investigated the droplet
behavior by using the MPS method and the compari-
son between the simulation result and a physical ex-
periment, and (Natsume et al., 2019a) performed a
droplet simulation with a particle method for liquid-
liquid two-phase flow. On the other hand, (Ruan et al.,
2021) proposed a method to model the contact inter-
action using a hybrid Euler-Lagrangian framework,
and (Xing et al., 2022) simulated surface tension flow
with a position-based dynamics (PBD) framework. In
addition, (Natsume et al., 2021a) also simulated the
viscous fluid injection by considering the effect of the
force working between two kinds of liquid. These
methods, however, did not consider wettability. For
the simulation considering wettability, the contact an-
gle, which is the angle formed between a liquid and
a solid body, is necessary. Unless the contact angle
is known, the wettability simulation cannot be per-
formed.
(Kondo and Matsumoto, 2021) proposed a sur-
face tension model and expressed wettability by in-
troducing the interaction ratio between fluid and wall;
however, it required contact angle calculation. On
the other hand, (Natsume et al., 2021b) proposed a
wettability method based on surface free energy be-
tween a liquid and a solid body, not by specifying
the contact angle but by calculating the interfacial
tension based on surface free energy. In addition,
(Natsume et al., 2022) proposed another method to
represent wettability by considering adhesional and
spreading works and (Mukai et al., 2022) performed
a liquid injection simulation with the new wettabil-
ity method. The paper demonstrated that the liquid
ejected from the catheter adhered to the solid body;
however, it did not investigate the drop time of each
Analysis of Wettability Model Using Adhesional and Spreading Works
231

droplet. Then, this paper evaluates the proposed wet-
tability method by the comparison of the drop time
between the simulation results and the physical ex-
periment in the same environment. The biggest merit
of the proposed method is to be able to simulate wet-
tability without contact angles that were necessary for
the simulations using conventional methods.
3 METHODS
3.1 Governing Equations
The purpose of the paper is to simulate the behavior
of the droplet ejected from a thin tube to a water tank
and to investigate the drop time by the comparison be-
tween the simulation results and a real physical exper-
iment. We employ the MPS method for the simulation
because particle methods can easily treat the topolog-
ical change caused by the detachment of the droplet
extruded from a tube, and the embolization material
and water are considered as incompressive fluid.
The governing equations for the liquid behavior
analysis are the equation of continuity and the Navier-
Stokes equations described as follows.
Dρ
Dt
=
∂ρ
∂t
+ ∇ · (ρu
u
u) = 0, (1)
ρ
Du
u
u
Dt
= −∇p + µ∇
2
u
u
u + ρg
g
g + f
f
f
Tension
, (2)
where, ρ is the density, t is the time, u
u
u is the velocity,
p is the pressure, µ is the viscosity coefficient, g
g
g is the
gravitational acceleration, and f
f
f
Tension
is the interfa-
cial tension.
For incompressive fluid, ∇ · u
u
u = 0 is true. Then,
Eq. (1) can be written in the following.
∂ρ
∂t
= 0 (3)
3.2 Wettability Model
Wettability is a feature that liquid on a solid body
keeps the contact angle between them, and there is
the following relationship between the contact angle
and the surface tensions as shown in Fig. 1 and Eq.
(4), which is called Young’ formula.
γ
s
= γ
l
cosθ + γ
sl
, (4)
where, θ is the contact angle, γ
s
, γ
l
, and γ
sl
are the
surface tensions of solid, liquid, and solid-liquid, re-
spectively.
However, we cannot simulate liquid behavior with
wettability unless the contact angle is known. On the
Figure 1: Relationship between the contact angle and the
surface tensions.
other hand, there is a work that separates the solid
and the liquid from the condition where they are at-
tached, which is called “adhesional work”. In addi-
tion, there is another work that restrains the liquid to
spread out on the solid body, which is called “spread-
ing work”. There are also the following relationships
between these works and the surface free energies ac-
cording to Dupr
´
e’s formula.
W
a
+ E
sl
= E
s
+ E
l
, (5)
W
d
+ E
sl
= E
s
− E
l
, (6)
where, W
a
and W
d
are the adhesional and the spread-
ing works, respectively. E
s
, E
l
, and E
sl
are the surface
free energies of the solid, the liquid, and the solid-
liquid, respectively. Here, the unit of surface free en-
ergy is J/m
2
and J = N · m. Then, the unit of surface
free energy becomes N/m, which is the same unit as
surface tension, and Eqs. (5) and (6) can be written as
Eqs. (7) and (8), respectively.
W
a
+ γ
sl
= γ
s
+ γ
l
, (7)
W
d
+ γ
sl
= γ
s
− γ
l
. (8)
Finally, the potential force that works at a particle
i is defined in the following by replacing works and
surface free energies with forces.
f
f
f
a
i
= f
f
f
s
i
+ f
f
f
l
i
− f
f
f
sl
i
, (9)
f
f
f
d
i
= f
f
f
s
i
− f
f
f
l
i
− f
f
f
sl
i
, (10)
f
f
f
k
i
= C
k
i
∑
j̸=i
f
p
(r
i j
)
r
r
r
j
− r
r
r
i
r
i j
, (11)
C
k
i
=
γ
k
l
0
(T
n
i
− T
t
i
)
, (12)
T
n
i
=
1
A
0
N
n
∑
j
f
p
(r
i j
)
r
r
r
j
− r
r
r
i
r
i j
· n
n
n
p
i
, (13)
T
t
i
=
1
A
0
N
t
∑
j
f
p
(r
i j
)
r
r
r
j
− r
r
r
i
r
i j
·t
t
t
p
i
, (14)
f
p
(r
i j
) =
(r
i j
− l
0
)(r
i j
− r
p
e
) (r
i j
≤ r
p
e
)
0 (Otherwise),
(15)
r
i j
=| r
r
r
j
− r
r
r
i
|, (16)
where, f
f
f
a
i
and f
f
f
d
i
are the potential forces of a particle
i for the adhesional and the spreading works, respec-
tively. k means s, l or sl, C
k
i
(C
s
i
, C l
i
, and C
sl
i
) are
GRAPP 2023 - 18th International Conference on Computer Graphics Theory and Applications
232
the potential coefficients of f
f
f
k
i
( f
f
f
s
i
, f
f
f
l
i
, and f
f
f
sl
i
) of a
particle i, respectively, f
p
is the strength of the force
working between particles, and r
r
r
i
and r
r
r
j
are the posi-
tion vectors of particles i and j, respectively. l
0
is the
initial distance between particles, A
0
is the small area
element at the curvature 0, N
n
and N
t
are the num-
bers of particles in the normal and the tangential di-
rections, respectively. n
n
n
p
i
and t
t
t
p
i
are the normal and
the tangential vectors for the calculation of the po-
tential coefficients C
k
i
(C
s
l
, C
l
i
, and C
sl
i
) of a particle i,
respectively. r
p
e
is the radius of influence for the calcu-
lation of potential forces. r
p
e
is 3.1 times of the initial
distance between particles (l
0
), and other parameters
are defined in the above equations.
Here, the adhesional force works vertically to sep-
arate the liquid and the solid. Then, the vertical force
of W
a
is used as the adhesional force, and the vertical
component is described as f
f
f
an
. Finally, f
f
f
an
and f
f
f
d
are connected with the Heaviside function (H), and
f
f
f
Tension
i
is calculated as the interfacial tension of a
particle i, and applied to f
f
f
Tension
in Eq. (2). f
f
f
i
in Eq.
(17) is designed so that the larger surface tension of
a particle i ( f
f
f
Tension
i
) is used for the smaller spreading
work of a particle i ( f
f
f
d
i
).
f
f
f
i
= f
f
f
an
i
− H f
f
f
d
i
, (17)
f
f
f
an
i
= ( f
f
f
a
i
· n
n
n
Sur f
)n
n
n
Sur f
, (18)
f
f
f
Tension
i
= S
i
d
V
0
1
N
i
∑
j
sinφ
i j
!
−1
− 1
f
f
f
i
, (19)
where, n
n
n
Sur f
is the normal vector on the boundary
surface. S
i
is 1 or -1 for the convex or the concave
boundary surfaces of a particle i, respectively. d is the
dimensional factor, V
0
is the volume of one particle,
N
i
is the number of particles within the radius of in-
fluence for a particle i, and φ
i j
is the angle between
the normal vectors of particles i and j.
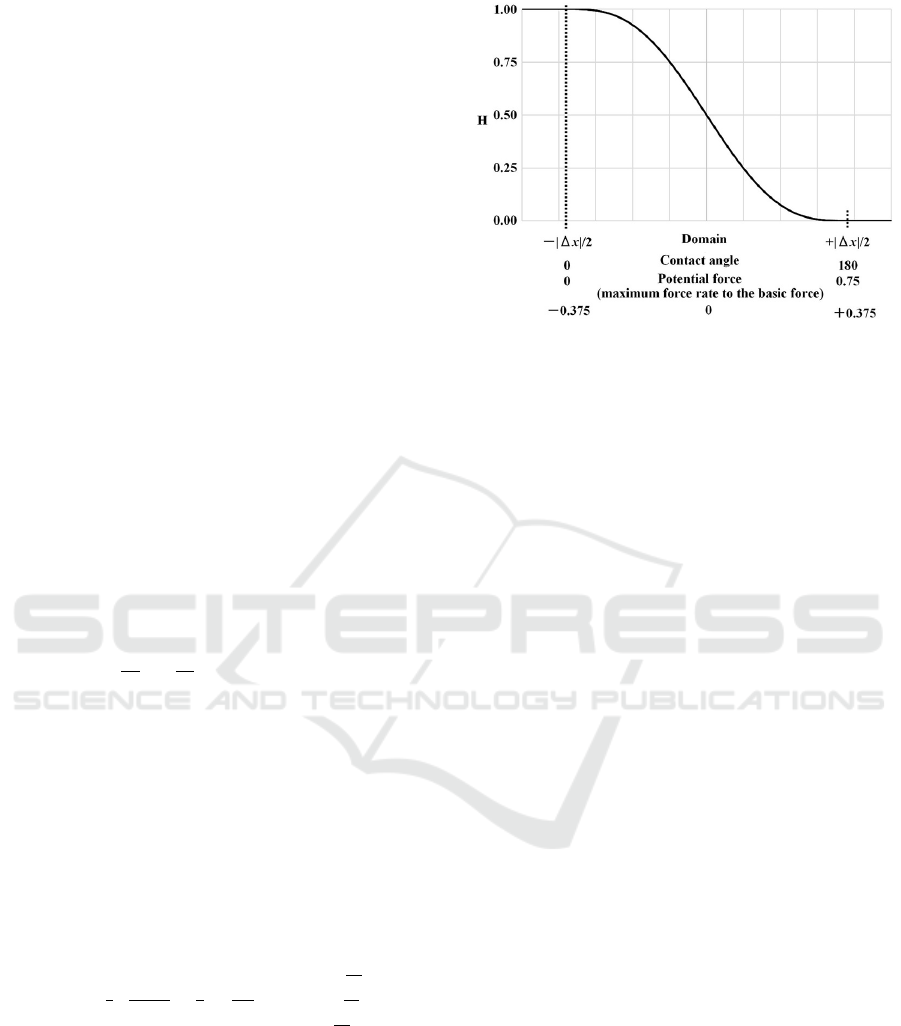
Fig. 2 and Eq. (20) show the approximate Heavi-
side function.
H =
1
x < −
∆x
2
1 −
1
2
2x+∆x
∆x
+
1
π
sin
2πx
∆x
|x| ≤
∆x
2
0
x >
∆x
2
.
(20)
The domain and the range of the Heaviside func-
tion are [0,180] for the contact angle and [0,1] for the
value, respectively. The outputs of 1 and 0 correspond
to the inputs of 0 and 180, respectively. The contact
angle, however, cannot be measured during the sim-
ulation. Then, the domain should be decided without
the contact angle, and it is defined by the potential
force instead of the contact angle in our method. The
maximum value of the potential force was 75% of the
Figure 2: Approximate Heaviside function.
basis one, which is measured at the curvature 0. Fi-
nally, the domain becomes [−0.375,+0.375] because
the center of the domain should be 0.
4 SIMULATIONS AND RESULTS
Fig. 3 shows the environment of the physical experi-
ment and the model of the simulation, which are the
same ones for easier comparison. In the physical ex-
periment, SCR780 was used as the liquid that was in-
jected into a water tank from a thin tube that is a real
catheter, which inner and outer diameters are 0.5 [mm]
and 1.0 [mm], respectively.
Tables 1 and 2 show the parameters used in the
simulation and the surface free energies of solid, liq-
uid, and solid-liquid, respectively. In fact, the theoret-
ical contact angle between the embolization material
(SCR780) and the catheter (Teflon tube) is 26.2
◦
. The
number of particles dynamically changes during the
simulation because the particles of the embolization
material (SCR780) are injected into the water tank
through the catheter. The detail is shown in Table 3.
Table 4 shows the specification of the PC used in the
simulation.
Fig. 4 shows the comparison between the simula-
tion results and the physical experiment in 4 [s] after
the injection starts. Fig. 4 (a) is the simulation image
by the method without wettability, it does not show
the feature of wettability, while Fig. 4 (b) shows the
feature and the liquid adheres to the surface of the
tube, which is similar to the image of the physical ex-
periment shown in Fig. 4 (c). The contact angle (θ)
in Fig. 4 (b) is about 25.0
◦
, which is similar to that in
Fig. 4 (c) that is about 28.0
◦
, although the theoretical
angle is 26.2
◦
. These results show that the proposed
method is effective for the wettability representation.
Fig. 5 shows the comparison between the simula-
Analysis of Wettability Model Using Adhesional and Spreading Works
233
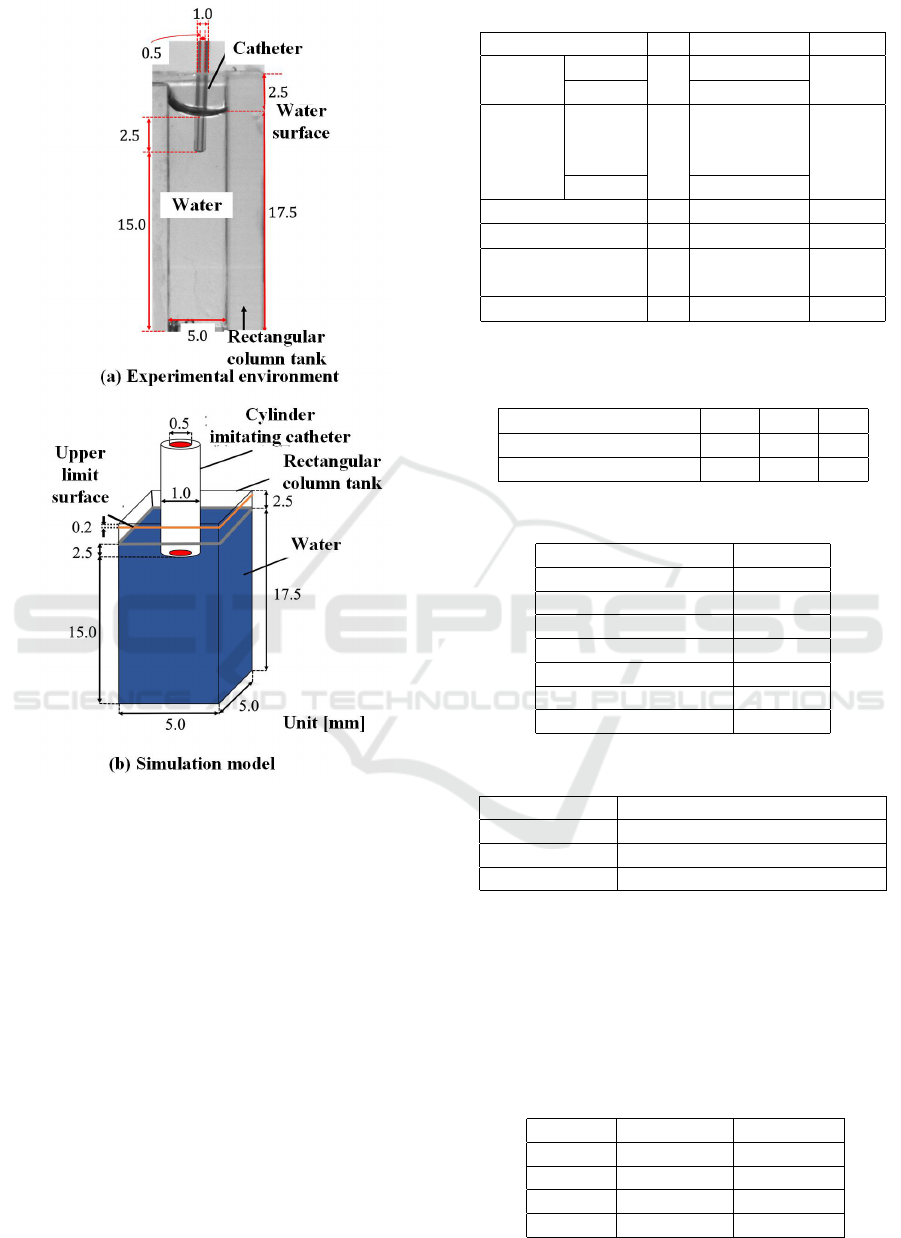
Figure 3: Experimental environment and simulation model.
tion result with the wettability method and the phys-
ical experiment. In Fig. 5, the comparison starts at
1.03[s] from the beginning because there is no liquid
in the tube at 0.0[s] in the physical experiment, while
there should be some particles in the simulation at the
initial state. After one droplet is dropped, there is
some liquid remaining in the tube, which amount cor-
responds to the volume in 1.03[s] after the injection
starts. Then, both initial states can start at 1.03[s] by
setting some particles that correspond to the volume
of the real liquid at 1.03[s] after the injection starts.
In the figure, both liquid states are almost the
same; however, the liquid in the simulation elongates
vertically more than that in the physical experiment,
and the liquid almost forms a droplet at 10.0[s] in the
simulation, while a droplet has not been formed yet in
the physical experiment. Table 5 shows the drop time
for one droplet.
Table 1: Parameters used in the simulation.
Parameter * Value Unit
Density Water ρ 1.00 × 10
3
kg/m
3
Liquid 1.18 × 10
3
Viscosity
coeffi- Water µ 1.00 × 10
−3
Pa · s
cient
Liquid 7.42 × 10
−1
Injection speed u
u
u 8.50 × 10
−3
m/s
Gravity g
g
g 9.80 m/s
2
Particle radius l
0
1.00 × 10
−4
m
(=Initial distance)
Time step ∆t 5.00
−5
s
* Symbol
Table 2: Surface free energies used in the simulation.
[J/m
2
]
Material γ
s
γ
l
γ
sl
Thin tube 10.5 — 0.8
Embolization material — 10.8 —
Table 3: Number of particles used in the simulation.
Particle type Numbers
Water 453,150
Wall 190,804
Catheter 3,384
SCR 780 (Minimum) 1,070
SCR 780 (Maximum) 44,072
Total (Minimum) 648,408
Total (Maximum) 691,410
Table 4: Specification of the PC used in the simulation.
CPU Xeon E5-1650 v3 3.5GHz
Main memory 32GB
GPU Tesla K40 with 12GB memory
OS Arch Linux
In Table 5, the drop time in the simulation is
shorter than that in the physical experiment except for
the first drop. On the first drop, there is the same vol-
ume of the liquid in the tube, and they drop at almost
the same time. However, there are more amounts
of liquid remaining in and on the tube in the sim-
Table 5: Drop time for one droplet.
[s]
Number Experiment Simulation
1 10.69 10.01
2 10.33 5.38
3 10.41 5.88
Average 10.32 7.09
GRAPP 2023 - 18th International Conference on Computer Graphics Theory and Applications
234
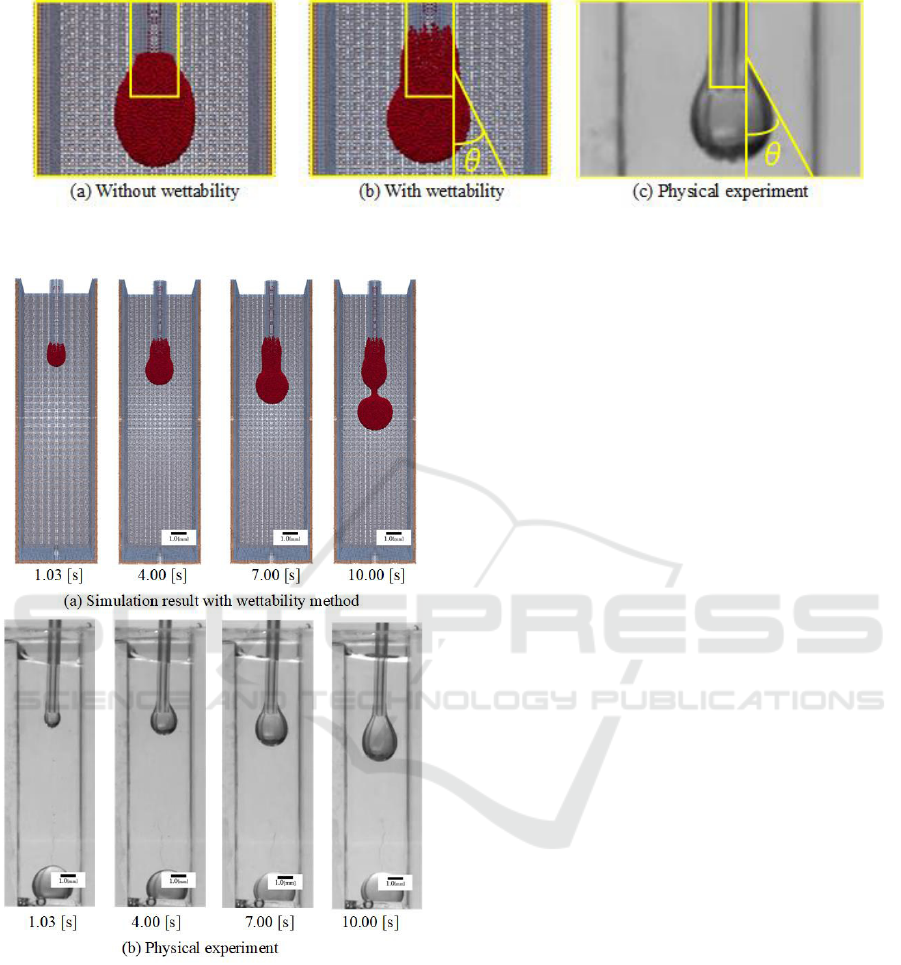
Figure 4: Comparison between the simulation results and the physical experiment for wettability.
Figure 5: Comparison between the simulation result and the
physical experiment for the drop time.
ulation by introducing the wettability method. The
volume of the droplet in the physical experiment was
about 1.80 × 10
−8
[m
3
], while that in the simulation
was about 8.84 × 10
−9
[m
3
] in average, which is about
the half of the real droplet volume. This means that
the interfacial tension of the particle in the simulation
is weaker than that in the real liquid. Then, the drop
time in the simulation becomes faster than that in the
physical experiment.
5 CONCLUSIONS AND FUTURE
WORKS
The conventional methods needed contact angles to
represent wettability since simulations were not able
to be performed without them. This means that
we could not represent wettability for the materials,
which contact angles are unknown. Then, we have
developed a new wettability method that does not
need to specify the contact angle but change the liquid
shape using adhesional and spreading works, and we
became able to represent wettability of materials even
if the contact angles were not known. In addition,
we have confirmed that the proposed method can rep-
resent wettability that is similar to the physical phe-
nomenon by the comparison between the simulation
results and the physical experiment,
However, the liquid elongated vertically more
than that in the experiment, and the drop time was
shorter. It seems that there are three main reasons
for the difference. One is that more liquid remains in
and on the tube by introducing the wettability method.
The second is that the interfacial tension based on po-
tential energy in the simulation is weaker than the real
force. The last one is that we did not consider the
visco-elastic feature of the liquid. The material is a
visco-elastic fluid so it has both characteristics of vis-
cosity and elasticity. This simulation, however, con-
sidered only viscosity and did not consider elasticity.
Then, we plan to perform the droplet simulation
by reconsidering the wettability method and the in-
terfacial tension model and also by introducing the
visco-elastic feature of the liquid in the future.
REFERENCES
Akinci, N., Akinci, G., and Teschner, M. (2013). Versatile
surface tension and adhesion for SPH fluids. ACM
Transactions on Graphics, 32(6):Article No. 182, 1–
18.
Brackbill, J. U., Kothe, D. B., and Zemach, C. (1992).
Analysis of Wettability Model Using Adhesional and Spreading Works
235

A continuum method for modeling surface tension.
Journal of Computational Physics, 100(2):335–354.
Gingold, R. A. and Monaghan, J. J. (1997). Smoothed par-
ticle hydrodynamics: Theory and application to non-
spherical stars. Monthly Notices of the Royal Astro-
nomical Society, 181(3):375–389.
Hattori, T. and Kohizuka, S. (2019). Numerical simulation
of droplet behavior on an inclined plate using the mov-
ing particle semi-implicit method. Mechanical Engi-
neering Journal, 6(5):19:00204–00220.
Kondo, M. and Matsumoto, J. (2021). Surface tension and
wettability calculation using density gradient poten-
tial in a physically consistent particle method. Com-
puter Methods in Applied Mechanics and Engineer-
ing, 385(114072):1–24.
Koshizuka, S. and Oka, Y. (1996). Moving-particle semi-
implicit method for fragmentation of incompressible
fluid. Nuclear Science and Engineering, 123(3):421–
434.
Morris, J. P. (2000). Simulating surface tension with
smoothed particle hydrodynamics. International
Journal for Numerical Methods in Fluids, 33:333–
353.
Mukai, N., Natsume, T., Oishi, M., and Ohsima, M. (2022).
Liquid injection simulation with wettability represen-
tation method considering adhesional and spreading
works. In 7th International Conference on Compu-
tational and Mathematical Biomedical Engineering
(CMBE), pages 617–620.
Natsume, T., Oishi, M., Ohsima, M., and Mukai, N.
(2019a). Particle based droplet simulation in liquid-
liquid two-phase flow. In MODSIM (23rd Interna-
tional Congress on Modelling and Simulation), pages
822–827.
Natsume, T., Oishi, M., Ohsima, M., and Mukai, N.
(2019b). Visualization of liquid drop behavior based
on particle method and its quantitative evaluation (in
Japanese). The Journal of the Society for Art and Sci-
ence, 18(3):106–113.
Natsume, T., Oishi, M., Ohsima, M., and Mukai, N.
(2021a). Droplet formulation method for viscous fluid
injection considering the effect of liquid-liquid two-
phase flow. ITE (The Institute of Image Informa-
tion and Television Engineers) Transactions on Media
Technology and Applications, 9(1):33–41.
Natsume, T., Oishi, M., Ohsima, M., and Mukai, N.
(2021b). Wettability method based on surface free
energy between solid and liquid. In IWAIT (Inter-
national Workshop on Advanced Image Technology)
2021, SPIE (The International Society for Optics and
Photonics), volume 11766, pages 1176613:1–6.
Natsume, T., Oishi, M., Ohsima, M., and Mukai, N.
(2022). A study on particle-based wettability method
considering adhesional and spreading wettings (in
Japanese). The Journal of the Society for Art and Sci-
ence, 21(2):97–110.
Nomura, K., Koshizuka, S., Oka, Y., and Obata, H. (2001).
Numerical analysis of droplet breakup behavior using
particle method. Journal of Nuclear Science and Tech-
nology, 38(12):1057–1064.
Ruan, L., Liu, J., Zhu, B., Sueda, S., Wang, B., and Chen, B.
(2021). Solid-fluid interaction with surface-tension-
dominant contact. ACM Transactions on Graphics,
40(4):Article 120.
Shirakawa, N., Rorie, H., Yamamoto, Y., and Tsunayama,
S. (2001). Analysis of the void distribution in a
circular tube with the two-fluid particle interaction
method. Journal of Nuclear Science and Technology,
38(6):392–402.
Tartakovsky, A. and Meakin, P. (2005). Modeling of surface
tension and contact angles with smoothed particle hy-
drodynamics. Physical Review, E 72:26301:1–9.
Wang, H., Mucha, P. J., and Turk, G. (2005). Water drops on
surfaces. ACM SIGGRAPH Papers, pages 921–929.
Xing, J., Ruan, L., Wang, B., Zhu, B., and Chen, B. (2022).
Position-based surface tension flow. ACM Transac-
tions on Graphics, 41(6):Article 244.
Yang, T., Lin, M. C., Martin, R. R., Chang, J., and Hu,
S. (2016). Versatile interactions at interfaces for SPH-
based simulations. In Eurographics/ACM SIGGRAPH
Symposium on Computer Animation, pages 57–66.
Zhang, Y., Wang, H., Wang, S., Tong, Y., and Zhou, K.
(2012). A deformable surface model for real-time wa-
ter drop animation. IEEE Transactions on Visualiza-
tion and Computer Graphics, 18(8):1281–1289.
GRAPP 2023 - 18th International Conference on Computer Graphics Theory and Applications
236
