Sewer-AI: Sustainable Automated Analysis of Real-World Sewer Videos
Using DNNs
Rajarshi Biswas, Marcel Mutz, Piyush Pimplikar, Noor Ahmed and Dirk Werth
August-Wilhelm Scheer Institut, Uni-Campus D 5 1, 66123 Saarbr
¨
ucken, Germany
{firstname.lastname}@aws-institut.de
Keywords:
Computer Vision, Deep Learning, Industrial Application.
Abstract:
Automated maintenance of sewer networks using computer vision techniques has gained prominence in the
vision-research community. In this work, we handle sewer inspection videos with severe challenges. These
obstacles hinder direct application of state-of-the-art neural networks in finding a solution. Thus, we perform
an exhaustive study on the performance of highly successful neural architectures on our challenging sewer-
video-dataset. For complete understanding we analyze their performance in different modes. We propose
training strategies for effectively handling the different challenges and obtain balanced accuracy, F1 and F2
scores of more than 90% for 17 out of the 25 defect categories. Furthermore, for developing resource efficient,
sustainable versions of the models we study the trade-off between performance and parameter pruning. We
show that the drop in average performance of the networks is within 1% with more than 90% weight pruning.
We test our models on the state-of-the-art Sewer-ML-dataset and obtained 100% true positive rate for 8 out of
18 defect categories in the Sewer-ML-dataset.
1 INTRODUCTION
The sewage system is an indispensable part of civic
life all around the world. In Germany the sewer net-
work is approximately 594,321 kilometers long as of
2018 while the US has almost 2.08 million kilometers
in total network length (ASCE, 2017). Various fac-
tors cause progressive aging of the sewer networks.
Thus, systematic inspection is required for maintain-
ing the sewers. Sewer networks maintenance in most
countries is carried out by the network operators who
perform sampling inspections with the aid of TV-
camera mounted robotic probes. These probes record
the sewer conditions using a rotating video camera
while being remotely driven by a professional inspec-
tor. This is the state-of-the-art in sewer inspection,
however, the cost incurred in terms of man hours and
finance is exorbitant. The inspectors need to examine
the video for identifying the defects for extended time
lengths which is exhausting, time-consuming and er-
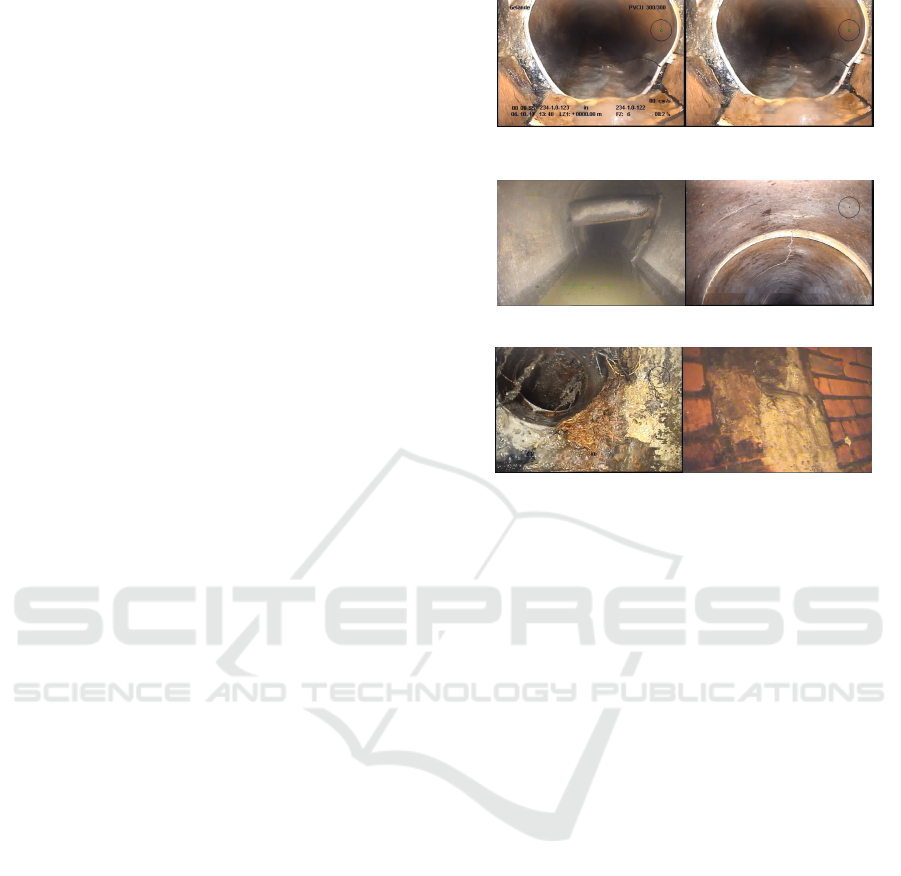
ror prone. This results in inconsistent labels, i.e., the
same image is assigned multiple labels by different in-
spectors. It is depicted in figure 4 where each image
is assigned to multiple different categories.
It costs approximately 2500C (Euros) to inspect
one kilometer of the sewer network in Germany. This
is compounded by the acute shortage of labor and do-
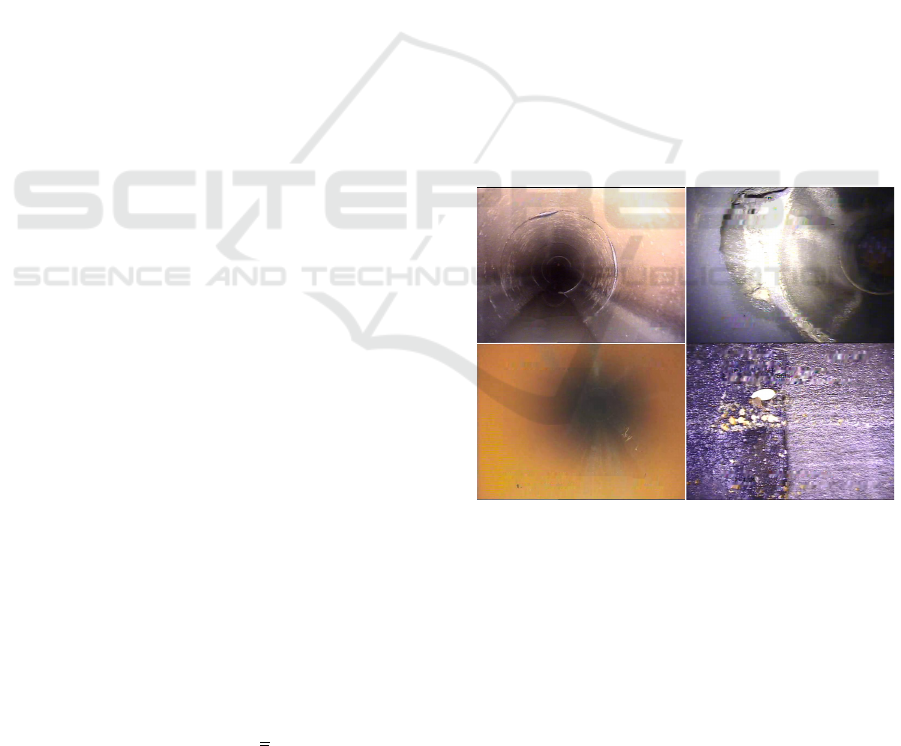
main experts. These factors render the current ap-
Figure 1: Challenging artefacts in real world sewer data.
proach for monitoring sewers both unscalable and un-
sustainable. In this paper, we perform an in-depth
analysis of the suitability of deep learning based mod-
els for automating the network inspection process and
thereby reducing the cost burden on the maintenance
industry. However, the prospect of direct application
of deep learning models from the computer vision
community is greatly limited due to several difficult
challenges. The primary obstacle is the inconsistency
in data collection, that is, there is no uniform stan-
dard with regards to equipment, format and resolu-
tion in which data is stored. Moreover, the dataset is
Biswas, R., Mutz, M., Pimplikar, P., Ahmed, N. and Werth, D.
Sewer-AI: Sustainable Automated Analysis of Real-World Sewer Videos Using DNNs.
DOI: 10.5220/0011709400003411
In Proceedings of the 12th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2023), pages 897-904
ISBN: 978-989-758-626-2; ISSN: 2184-4313
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
897

Figure 2: Highly imbalanced class distribution in real world
sewer data.
characterized by poor quality as most of the recorded
videos contain blur, grain and distortion artefacts (re-
fer to figure 1). There is also huge variation in terms
of lighting distribution, camera orientation, material
characteristics and inconsistent labeling, i.e., there is
high inter-annotator disagreement (refer to figure 4).
In addition to this, the dataset suffers from highly
imbalanced distribution among the labels (as can be
seen in figure 2). In order to systematically handle
all these obstacles we perform three experiments with
increasing degree of complexity for the classification
task. We study the performance of the chosen neu-
ral architectures, HRNet (Wang et al., 2019), ResNet-
152 (He et al., 2016), MobileNet V3 Large (Sandler
et al., 2018), DenseNet-264 (Huang et al., 2017), In-
ception V4 (Szegedy et al., 2016) and Efficient-Net
(Tan and Le, 2019) respectively through these exper-
iments. Our motivation behind these experiments is
to determine the comparative difficulty-level posed
by the different defect classes to these networks un-
der the non-uniform data collection and labeling stan-
dards of the sewer maintenance industry. In the first
experiment, Single-defect classification (E1), we test
the networks for individual defect category identifica-
tion using dataset containing only positive instances
from specific defect category and all the negative in-
stances present in our dataset. Then in the second ex-
periment, One-vs-all classification (E2), we observe
the performance of the networks in distinguishing a
specific defect category against all the categories, in-
cluding the non-defect instances, together. Through
this experiment, we test the influence of the low inter-
class distinction among some of the labels and other
inconsistencies in our dataset on the classification per-
formance of the networks for each defect category.
Finally, as the last experiment Classification under
Weight-pruning (E3) we test the drop in performance
of the trained models when performing inference with
heavily pruned models. Our goal here is to study the
suitability of the chosen networks under resource con-
strained environments. To summarize, our contribu-
tions in this paper are the following:
• Comprehensive performance analysis of the most
effective neural network architectures for sewer
video classification using three different experi-
ments with gradual increase in complexity.
• Performance estimation of the neural networks
under heavy weight pruning for developing re-
source efficient and sustainable solutions.
• Training strategies for handling acute data imbal-
ance in the sewer data.
2 RELATED WORK
The success of deep learning models in solving com-
puter vision problems has prompted their widespread
adoption in various industrial applications. The civil
engineering discipline too is witnessing a steady
adoption of different techniques for conducting visual
inspection of large civic infrastructures. There are ap-
proaches that borrow different classical vision meth-
ods for analysing the condition of pavements, bridges,
roads tunnels etc. Additionally, there is emphasis
too on using 3D modeling for digital reconstruction
and visualization of these large infrastructures for im-
proving the inspection quality. The area of auto-
matic sewer network analysis also generates atten-
tion in the vision research community. This has lead
to the development of crack detection in the sewers
using image processing (Halfawy and Hengmeechai,
2014) and segmentation (Iyer and Sinha, 2006) meth-
ods. Mathematical morphology is used by the au-
thors in (Sinha and Fieguth, 2006) for classifying
cracks, holes and joints in the sewer pipes whereas the
work (Dang et al., 2018) uses morphological opera-
tions along with edge-detection, binarization for iden-
tifying defects by recognizing the text on the sewer
videos. Employment of models with task-specific
features or heuristic decision rules are reported in
(Myrans et al., 2018). However, classical approaches
such as the ones mentioned require a lot of feature en-
gineering, extensive pre-processing routines and suf-
fer more from noisy, low-quality data. Deep learn-
ing based approaches resolve this problem. As for
example, convolutional neural networks or similar
deep neural network derived applications learn di-
rectly from the data obviating feature engineering
with little to almost non-existent pre-processing ef-
forts. The authors in (Cha et al., 2017; Montero
et al., 2015) demonstrate the efficiency of convolu-
tional neural networks over conventional techniques
for tunnel inspection. The introduction of deep learn-
ing has led to improvements in image & video anal-
ysis (Fang et al., 2020; Moradi et al., 2020; Wang
et al., 2021), estimation of water level (Haurum et al.,
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
898
2020; Ji et al., 2020), defect identification (Cheng and
Wang, 2018; Kumar et al., 2020; Yin et al., 2020),
segmentation (Pan et al., 2020; Piciarelli et al., 2019;
Wang and Cheng, 2020) along with the handling of
the classification problem in the multi-class setting
(Hassan et al., 2019; Kumar et al., 2018; Li et al.,
2019; Meijer et al., 2019; Xie et al., 2019). The
steady industrial and academic interest in automat-
ing the sewer maintenance process has led to utiliza-
tion of different technologies. For instance, the works
(Duran et al., 2002; Liu and Kleiner, 2013) report
the use of various sensors in this area. More specif-
ically, there is use of acoustic sensors (Iyer et al.,
2012) , depth sensors (Alejo et al., 2017; Haurum
et al., 2021; Henriksen et al., 2020) and laser scan-
ners (Lepot et al., 2017; Dehghan et al., 2015) for de-
fect detection and reconstruction of the sewer pipes.
However, none of the works mentioned above study
the performance of different highly effective neural
networks for classifying sewer defects in three differ-
ent modes as described earlier. Moreover, through the
pruning experiment we derive performance bounds
for developing lightweight versions of the networks
suitable for operation under resource constrained en-
vironments. To the best of our knowledge our work is
the first in the area of automated sewer video analysis
to perform this study which can help in developing
sustainable and energy efficient solutions. Further-
more, we benchmark our models against the Sewer-
ml dataset (Haurum and Moeslund, 2021) for under-
standing their generalization capabilities and obtain
better results compared to them.
3 DATASET
The data in our work is collected by registered sewer
network operators from 221 municipalities in Ger-
many. The operators employ human experts to iden-
tify the defects in the videos and use two software,
IBAK and PIPEX respectively, for annotating the
video data with the identified defects. The defects
are categorized into standard defect inspection codes
used all across Germany for sewer maintenance. A
total of 10,205 video files are collected from the 221
municipal locations amounting to 2.37 Terra-Bytes.
For every video, we extract defect frames from the
time interval marked as featuring a set of defects and
extract the negative frames using an offset of 10 sec-
onds outside this interval in either direction of the
time axis. Following this strategy we collect 156,028
frames, having resolutions of 576x480 and 576x768
respectively, in total amounting to 87.10 GB of frame
data. The extracted frames contain different informa-
Figure 3: Inpainting based text removal from frames.
(a) BAG,BAH,BCA,BAJ (b) BAJ,BAB
(c) BBB,BBA (d) BBB,BAF
Figure 4: Ambiguous instances with multiple labels.
tion in the form of text overlay. However, such tex-
tual information can wrongly influence the decision
making process of the neural classifiers. So, we re-
move the text from the images using optical character
recognition, for identifying the text, followed by in-
painting (Bertalmio et al., 2001). The effect of this
frame processing is seen in figure 3. There are 25
different defect categories, however, the distribution
of instances pertaining to each of these categories is
highly imbalanced as shown in figure 2.
4 METHOD
We perform three different experiments with the cho-
sen neural networks to handle the challenges in our
real world dataset. Our goal is to systematically es-
timate the performance of the different chosen net-
works. So, as our first experiment (E1), we train the
networks to perform single defect category identifi-
cation. This is followed by the second experiment
(E2), where we test the networks ability to perform
one-vs-all classification and finally in our last exper-
iment (E3), we prune systematically the parameters
of the network up to 98 percent of it’s original value
and study the drop in performance compared to the
results obtained from experiments E1 and E2 respec-
tively. The motivation behind our experiments is to
handle challenges in our dataset in an increasing de-
gree of complexity. Since our dataset suffers from
Sewer-AI: Sustainable Automated Analysis of Real-World Sewer Videos Using DNNs
899

Table 1: Average performance of the networks for experiments E1, E2, E3.
Neural Net E1 E3(E1 + Pruning) E2 E3(E2 + Pruning)
BA F1 F2 BA F1 F2 BA F1 F2 BA F1 F2
HRNet 85.27 0.81 0.83 84.46 0.82 0.80 77.67 0.71 0.65 79.12 0.74 0.69
ResNet 82.77 0.82 0.82 81.54 0.82 0.82 78.65 0.73 0.67 78.75 0.73 0.67
EfficientNet 75.39 0.73 0.73 74.88 0.70 0.70 73.34 0.63 0.59 72.75 0.67 0.65
MobileNet 82.83 0.80 0.78 78.76 0.72 0.70 79.34 0.74 0.68 74.90 0.62 0.58
Inception 82.05 0.77 0.76 82.76 0.79 0.78 76.55 0.70 0.66 76.41 0.69 0.66
DenseNet 82.25 0.81 0.75 81.25 0.78 0.76 80.55 0.76 0.72 80.94 0.76 0.70
Best Avg. Perf. 89.38 0.88 0.88 90.13 0.89 0.90 84.59 0.82 0.79 84.08 0.83 0.82
various limitations, discussed previously, we first con-
sider the simple setting of single defect category iden-
tification (E1). Subsequently, we consider the com-
paratively complex task of one-vs-all classification
with our dataset (E2) followed by the parameter prun-
ing experiment (E3).
We divide our dataset into train, validation and test
sets using a 80-10-10 split for each category. How-
ever, it is important to note that our dataset is highly
skewed towards negative images, that is, the number
of frames without any defects is much larger com-
pared to the number of frames in any individual defect
category. For handling this imbalance while training
our models we follow a specific training strategy. In
this approach, we first consider all the positive train-
ing instances of a particular class and an equal num-
ber of random negative instances in our first epoch of
training. In the next epoch, we keep the same positive
instances and take another set of random negative im-
ages of same size and continue training. In this way,
in every epoch we keep the same positive images but
keep considering set of random negative instances of
same size from our negative frames. We repeat this
strategy for 100 epochs for training the chosen neu-
ral networks. We have intentionally extracted nega-
tive frames from the videos in much larger proportion
compared to the frames containing the defects as we
wanted to understand the performance of the models
under real conditions where on average the defects oc-
cur in a highly infrequent manner.
For training the models in the one-vs-all classifi-
cation mode, experiment E2, we use the pre-trained
single defect classifiers and fine-tune the models on
the dataset reorganized in a one-vs-all way. We
take the specific defect category as the positive class
and all the other defect categories including the non-
defective instances as the negative class. For ease of
reference we assign the non-defective instances to the
“No Defect” category. In each epoch, we take the
same number of random “No Defect” instances as
the number of positive instances, and in the negative
dataset we further add the same number of instances
from the other defect categories with equal distribu-
tion from each category. Now, our negative dataset
size is twice the size of our positive dataset. This
setup ensures that the model will encounter a higher
proportion of “No Defect” instances compared to spe-
cific defect category instances during training. At the
same time, in addition to the “No Defect” instances,
it will be able to distinguish the specific defect cat-
egory from the other defect categories. For the ex-
periments E1 and E2, we optimize binary cross en-
tropy loss using a batch size of 16 and perform hy-
perparamter search over the optimizers Adam, SGD
and over learning rates of 1e-3, 1e-4 respectively. We
compute balanced accuracy, F1 and F2 scores in all
our experiments for measuring the performance of the
models on the test set.
With the view of developing energy efficient so-
lutions and reducing the computational burden we
study the influence of parameter pruning on the per-
formance of our models, obtained from E1 and E2 re-
spectively, under experiment E3. We use global prun-
ing for this purpose. In this approach, different layers
of the model are considered as a single global mod-
ule, and the weights closer to zero are pruned depend-
ing upon the amount of pruning percentage specified.
This type of pruning converts dense matrix represen-
tation to a sparse matrix, due to which the model size
gets reduced substantially. We tried pruning percent-
ages of 30, 50, 70, 90, 98 respectively. We keep on
increasing the pruning percentage as specified, in suc-
cession, if the balanced accuracy drop on test dataset
is less than 1 percent. If it drops more than one per-
cent, we stop pruning that network. This way we are
able to do dynamic pruning and come up with the best
pruning threshold or percentage for all the models for
each defect category. Following this strategy, we are
able to prune the models to a tenth of it’s original size
which significantly helps us in reducing the storage
and computational budget. Through this pruning ex-
ercise we try to find the most accountable weights of
our models responsible for making correct predictions
and discard those that are either irrelevant or degrade
the model’s performance. With each pruning thresh-
old, we check performance of each pruned model on
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
900
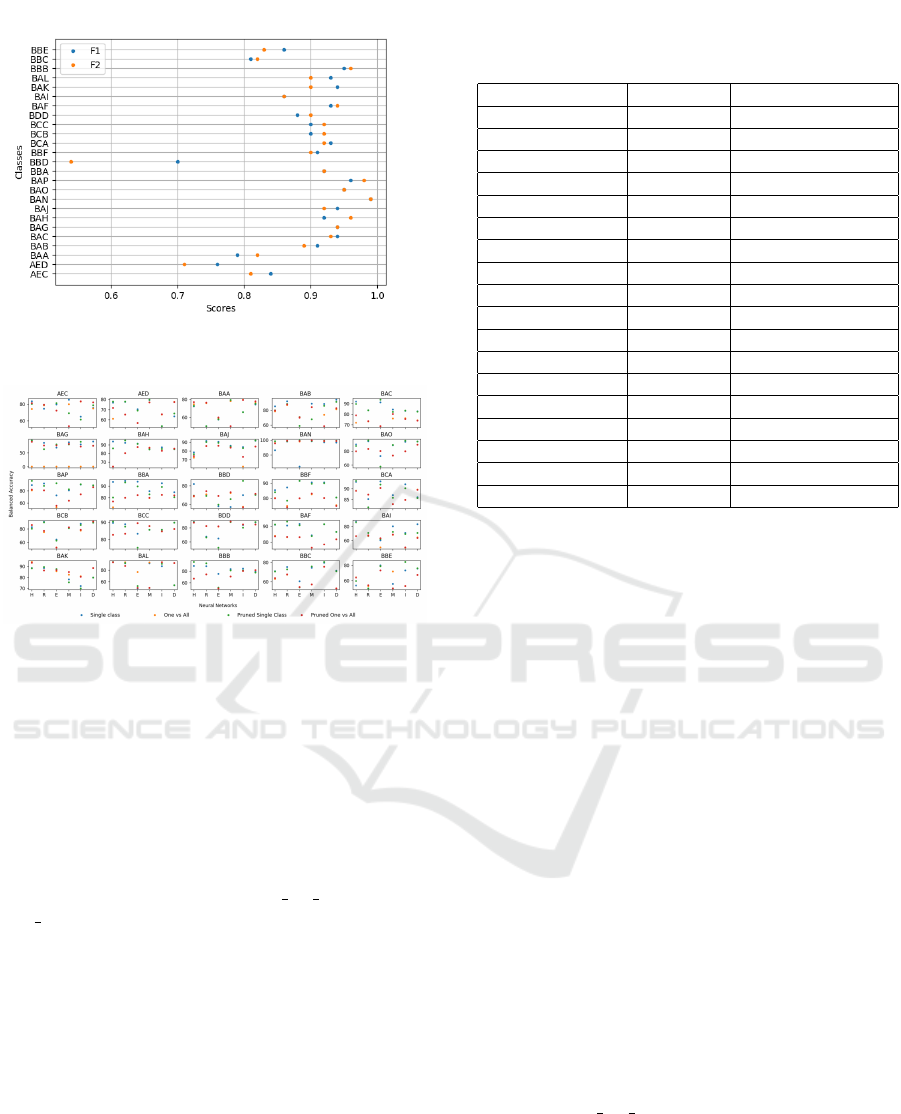
Figure 5: F1 and F2 scores obtained for each defect cate-
gory.
Figure 6: Balanced Accuracy for each defect category under
experiments E1, E2 and E3.
the test set that is used in our previous experiments
and report the results obtained with the pruned mod-
els.
5 RESULTS AND DISCUSSION
We trained six different classifiers, HRNet, ResNet-
152, EfficientNetV2-L, MobileNet V3 Large, Incep-
tion V4 and DenseNet-264 with significantly differ-
ent number of trainable parameters, for identifying
each defect category. We follow the training strat-
egy described in section 4 for handling the critical
imbalance in our dataset. The results obtained with
the chosen networks for classifying each defect cat-
egory under the experiments E1, E2 and E3 are re-
ported in detail in figures 5 and 6. The balanced accu-
racy scores obtained from the chosen neural networks
under all three experiments for every defect category
in our sewer dataset can be seen in figure 6. We re-
port the best F1 and F2 scores obtained for each defect
category from our experiments in figure 5.
Under experiment E1 we trained the six different
neural networks on each of the 25 defect categories.
Out of the 25 defect categories, we obtained more
Table 2: Performance of our single defect models on the
Sewer-ML test set.
SewerML-Code Our-Code TPR on SewerML
VA BDD 2.20%
RB BAB 100.00%
OB BAF 2.49%
PF — —
DE BAA 100.00%
FS BAG 98.83%
IS BAI 2.15%
RO BBA 100.00%
IN BBF 100.00%
AF BBC 62.09%
BE BBC 68.26%
FO BBE 0.0%
GR BCA 0.0%
PH BAH 100.00%
PB BAG 96.47%
OS BAH 100.00%
OP BAH 100.00%
OK BAH 100.00%
than 90 percent balanced accuracy on 14 categories,
more than 85 percent balanced accuracy on 5 cate-
gories while the rest gave around 80 percent on the
same metric. The defect category BAF is the most
frequently occurring defect in our dataset with a total
number of 8629 instances. On this category we ob-
tained a balanced accuracy score of 91.5 percent. On
all the categories containing more than 1000 instances
we achieved more than 90 percent balanced accuracy.
Interestingly, on the remaining 10 categories with less
than 1000 instances we achieved balanced accuracy
score between 85 percent and 90 percent. In some of
the rare categories, despite having very less instances
but due to its visually distinct nature, our models were
able to achieve very high accuracy. For instance, we
achieved 98.70 percent accuracy on the BAN class
which has only 119 instances and 91.91 percent ac-
curacy for the BAP class which has 138 instances re-
spectively. This shows that if the class is visually dis-
tinct, then even with as less as 100 images, our models
are capable of achieving good results. HRNet (19.25
million parameters) was the best performing model
with an average balanced accuracy of 85.27 percent
and a F2 score of 0.83 across all the defect categories
(refer to Table 1). The second best performing model
was MobileNet V3 Large, which is also the smallest
in size with 5.48 million parameters compared to the
other networks, with an average balanced accuracy of
82.83 percent. While DenseNet-264 (72.08 Million
parameters) and ResNet-152 (60.19 Million param-
eters) achieved average balanced accuracy scores of
82.25 percent and 82.77 percent respectively. These
results demonstrated models with smaller parameter
Sewer-AI: Sustainable Automated Analysis of Real-World Sewer Videos Using DNNs
901

count, i.e., MobileNet V3 Large achieved accuracy
scores close to or even better than much larger mod-
els. Such smaller models might be easier to integrate
on the inspection robots and can be used for quick
reliable inference during sewer inspection. This fact
further motivated us in the direction of pruning (E3)
in order to explore the feasibility of creating smaller
models that require less computational power but can
still achieve high, reliable performance.
In our next experiment E2 we tested the chosen
neural networks ability to distinguish each defect cat-
egory against all the other defect categories includ-
ing the non-defective instances, i.e., extracted images
with no defects. The results obtained in this exper-
iment establish DenseNet-264 as the best perform-
ing neural network with an average balanced accu-
racy of 80.55 percent, F1 score of 0.76 and F2 score
of 0.72 respectively across all the defect categories
(refer to Table 1). This is different from the results
obtained from experiment E1 where HRNet was the
best performing among all the chosen networks. In
the results from E2 we witness a drop of 4.72 per-
cent in average balanced accuracy, however, we ex-
pected this since there is very low inter-class varia-
tion among many defect categories. For example, the
defect categories BAG, BAH, BAJ and BDE are all
related to errors in pipe connections and are very sim-
ilar in their visual appearance. Therefore, having sim-
ilar images in both the positive and negative classes
under the one-vs-all setting decrease the performance
of the networks. As further examples, the defect cat-
egories BAB, BAC, BAF and BAO are related pipe
damage and contain instances which are very similar
with some being visually indistinguishable. In spite
of this, we were able to obtain more than 90 percent
balanced accuracy for 5 defect categories. Visually
distinct categories like BAN yielded very high bal-
anced accuracy of 99.57 percent while performance
on the shifted connection category BAJ, similar to
other connection related defect categories like BAG,
BAH, BDE, dropped to 86.01 percent from 91.95 per-
cent obtained under experiment E1. Thus, the models
under one-vs-all strategy (E2) certainly helped us in
differentiating one defect category from all the other
categories including the non-defective category, but
due to low inter-class variability in few of the cate-
gories the performance of the models dropped.
Under experiment E3, we performed pruning on
all the single-defect and one-vs-all classifiers devel-
oped in the experiments E1 and E2 respectively. With
the dynamic pruning strategy, described earlier, we
were able to find models with least size but still capa-
ble of achieving performance similar to the original
models. The average pruning on single-defect classi-
fiers from E1 achieved in our experiment across all the
classes was around 50 percent for all the neural net-
works apart from DenseNet-264 where we achieved
75 percent average pruning. For one-vs-all classifiers
from E2, the average pruning ranged from 60 to 85
percent. We were able to prune more than 90 percent
for 44 different single-defect models and 73 differ-
ent one-vs-all models. Pruning significantly reduced
model size, as with 90 percent or more pruning the
model size went down to 1/10th of the original model.
As a result, a significant number of models were re-
duced to a much smaller size and it helped us to re-
duce the storage budget significantly. Remarkably,
55 single-defect classifiers under pruning gave bet-
ter results than their corresponding non-pruned ver-
sions. Similarly, 62 of our one-vs-all pruned mod-
els performed better compared to their corresponding
non-pruned versions. Over here 6 models gave sig-
nificant results, with an increase in balanced accuracy
by 6 to 11 percentage points. This shows that pruning
resulted in finding the most important weights of the
model and it discarded the weights which were rel-
atively less important or which reduced the model’s
performance. Thus pruning gave us the best com-
pact models which resulted in achieving higher per-
formances. In majority of the pruned models, the drop
in balanced accuracy scores stayed within the 1 per-
cent mark of the scores obtained with the correspond-
ing non-pruned versions. Finally, after conducting ex-
periments E1, E2 and E3 we found that the average
best performance over the 25 different defect cate-
gories considering only the best performing networks
is 90.13 percent (refer to Table 1). This shows that if
we use the best performing model for each defect cat-
egory, we are able to achieve 90% average balanced
accuracy across all the 25 classes.
Lastly, we tested the performance of our models
on the largest publicly available standardized dataset
for sewer inspection (Haurum and Moeslund, 2021).
Our goal was to determine whether our models are
able to generalize to other data sources and to observe
the levels of performance they can offer on these data.
We identified corresponding defect categories in our
respective datasets and measure the performance of
our models on the Sewer-ML test set. To be precise,
we computed the True Positive Rate (TPR) or Recall
and found that on 8 out of the 18 defect categories
in the Sewer-ML dataset our models achieve a TPR
of 100 percent and more than 95 percent on the de-
fect catagories FS and PB in the Sewer-ML dataset
(refer to Table 2). On two defect categories, our cor-
responding models achieve TPR of more than 60 per-
cent while on the remaining six very low performance
is observed. We believe this can be due to improper
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
902

mapping between the defect categories in our dataset
compared to their dataset.
6 CONCLUSION
To summarize, in this paper we thoroughly analyzed
the performance of six different neural networks for
identifying the defects present in real world sewer in-
spection videos. We outlined the critical challenges
present in our dataset, proposed strategies for train-
ing neural networks for handling these challenges and
performed three different experiments, E1, E2 and
E3 respectively, to study the effectiveness of the cho-
sen networks in handling such challenging data. We
found that for experiment E1 HRNet was the best
performing neural architecture with an average bal-
anced accuracy of 85.27% across all the defect cate-
gories. For the more complex task in experiment E2
we found that DenseNet-264 performed the best with
an average balanced accuracy of 80.55%. In our re-
sults obtained for experiment E2 we witnessed a drop
of 4.72% on average in balanced accuracy. We believe
this is due to the very low inter-class variation among
the defect categories present in our dataset. Under
the pruning experiment in E3 we were able to signifi-
cantly reduce the model size. With pruning at 90 per-
cent or more, the models got reduced to one-tenth of
it’s original size. In total, we were able to prune 117
different class specific models, from experiments E1
and E2 combined, by more than 90 percent. However,
the drop in balanced accuracy scores stayed within the
1 percent mark of the scores obtained with the corre-
sponding non-pruned versions. Finally, we tested our
models on the Sewer-ML dataset and obtained very
high recall of 100% on 8 out of the 18 defect cate-
gories presented in the Sewer-ML dataset.
ACKNOWLEDGEMENTS
This research was funded in part by the German Fed-
eral Ministry of Education and Research (BMBF) un-
der the project KIKI (grant number 02WDG1594A).
It is a joint project of the August-Wilhelm-Scheer
Institut, TU Clausthal, AHT AquaGemini GmbH,
EURAWASSER Betriebsf
¨
uhrungsgesellschaft mbh,
IBAK Helmut Hunger GmbH & Co. KG and
Entsorgungsverband Saar Kd
¨
oR. August-Wilhelm-
Scheer Institut is mainly entrusted with conducting
research in artificial intelligence for automatically di-
agnosing the condition of the sewers.
REFERENCES
Alejo, D., Caballero, F., and Merino, L. (2017). Rgbd-
based robot localization in sewer networks. In
2017 IEEE/RSJ International Conference on Intelli-
gent Robots and Systems (IROS), pages 4070–4076.
ASCE (2017). American society of civil engineers 2017
infrastructure report card.
Bertalmio, M., Bertozzi, A. L., and Sapiro, G. (2001).
Navier-stokes, fluid dynamics, and image and video
inpainting. In Proceedings of the 2001 IEEE Com-
puter Society Conference on Computer Vision and
Pattern Recognition. CVPR 2001, volume 1, pages I–
I. IEEE.
Cha, Y.-J., Choi, W., and B
¨
uy
¨
uk
¨
ozt
¨
urk, O. (2017). Deep
learning-based crack damage detection using convo-
lutional neural networks. Comput.-Aided Civ. Infras-
truct. Eng., 32(5):361–378.
Cheng, J. C. and Wang, M. (2018). Automated detection
of sewer pipe defects in closed-circuit television im-
ages using deep learning techniques. Automation in
Construction, 95:155–171.
Dang, L. M., Hassan, S., Im, S., Mehmood, I., and Moon,
H. (2018). Utilizing text recognition for the defects
extraction in sewers cctv inspection videos. Comput-
ers in Industry, 99.
Dehghan, A., Mehrandezh, M., and Paranjape, R. (2015).
Defect detection in pipes using a mobile laser-optics
technology and digital geometry. MATEC Web of Con-
ferences, 32:06006.
Duran, O., Althoefer, K., and Seneviratne, L. (2002). State
of the art in sensor technologies for sewer inspection.
IEEE Sensors Journal, 2(2):73–81.
Fang, X., Guo, W., Li, Q., Zhu, J., Chen, Z., Yu, J., Zhou,
B., and Yang, H. (2020). Sewer pipeline fault identi-
fication using anomaly detection algorithms on video
sequences. IEEE Access, 8:39574–39586.
Halfawy, M. and Hengmeechai, J. (2014). Efficient algo-
rithm for crack detection in sewer images from closed-
circuit television inspections. Journal of Infrastruc-
ture Systems, 20:04013014.
Hassan, S., Dang, L. M., Mehmood, I., Im, S., Choi, C.,
Kang, J., Park, Y.-S., and Moon, H. (2019). Under-
ground sewer pipe condition assessment based on con-
volutional neural networks. Automation in Construc-
tion.
Haurum, J. B., Allahham, M. M. J., Lynge, M. S., Hen-
riksen, K. S., Nikolov, I. A., and Moeslund, T. B.
(2021). Sewer defect classification using synthetic
point clouds. In VISIGRAPP.
Haurum, J. B., Bahnsen, C. H., Pedersen, M., and Moes-
lund, T. B. (2020). Water level estimation in sewer
pipes using deep convolutional neural networks. Wa-
ter.
Haurum, J. B. and Moeslund, T. B. (2021). Sewer-ml:
A multi-label sewer defect classification dataset and
benchmark. In Proceedings of the IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition,
pages 13456–13467.
Sewer-AI: Sustainable Automated Analysis of Real-World Sewer Videos Using DNNs
903

He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. 2016 IEEE Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 770–778.
Henriksen, K. S., Lynge, M. S., Jeppesen, M. D. B., Al-
lahham, M. M. J., Nikolov, I. A., Haurum, J. B.,
and Moeslund, T. B. (2020). Generating synthetic
point clouds of sewer networks: An initial investi-
gation. In Augmented Reality, Virtual Reality, and
Computer Graphics: 7th International Conference,
AVR 2020, Lecce, Italy, September 7–10, 2020, Pro-
ceedings, Part II, page 364–373, Berlin, Heidelberg.
Springer-Verlag.
Huang, G., Liu, Z., and Weinberger, K. Q. (2017). Densely
connected convolutional networks. 2017 IEEE Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 2261–2269.
Iyer, S. and Sinha, S. (2006). Segmentation of pipe images
for crack detection in buried sewers. Comp.-Aided
Civil and Infrastruct. Engineering, 21:395–410.
Iyer, S., Sinha, S. K., Pedrick, M., and Tittmann, B. R.
(2012). Evaluation of ultrasonic inspection and imag-
ing systems for concrete pipes. Automation in Con-
struction, 22:149–164.
Ji, H. W., Yoo, S. S., Lee, B.-J., Koo, D. D., and Kang, J.-
H. (2020). Measurement of wastewater discharge in
sewer pipes using image analysis. Water, 12(6).
Kumar, S., Wang, M., Abraham, D., Jahanshahi, M., Iseley,
T., and Cheng, J. (2020). Deep learning–based auto-
mated detection of sewer defects in cctv videos. Jour-
nal of Computing in Civil Engineering, 34:04019047.
Kumar, S. S., Abraham, D. M., Jahanshahi, M. R., Iseley,
T., and Starr, J. (2018). Automated defect classifica-
tion in sewer closed circuit television inspections us-
ing deep convolutional neural networks. Automation
in Construction, 91:273–283.
Lepot, M., Stani
´
c, N., and Clemens, F. H. (2017). A tech-
nology for sewer pipe inspection (part 2): Experimen-
tal assessment of a new laser profiler for sewer defect
detection and quantification. Automation in Construc-
tion, 73:1–11.
Li, D., Cong, A., and Guo, S. (2019). Sewer damage detec-
tion from imbalanced cctv inspection data using deep
convolutional neural networks with hierarchical clas-
sification. Automation in Construction, 101:199–208.
Liu, Z. and Kleiner, Y. (2013). State of the art review of in-
spection technologies for condition assessment of wa-
ter pipes. Measurement, 46:1–15.
Meijer, D., Scholten, L., Clemens, F., and Knobbe, A.
(2019). A defect classification methodology for sewer
image sets with convolutional neural networks. Au-
tomation in Construction, 104:281–298.
Montero, R., Victores, J., Mart
´
ınez, S., Jard
´
on, A., and
Balaguer, C. (2015). Past, present and future of
robotic tunnel inspection. Automation in Construc-
tion, 59:99–112.
Moradi, S., Zayed, T., Nasiri, F., and Golkhoo, F. (2020).
Automated anomaly detection and localization in
sewer inspection videos using proportional data mod-
eling and deep learning–based text recognition. Jour-
nal of Infrastructure Systems, 26:04020018.
Myrans, J., Everson, R. M., and Kapelan, Z. (2018). Auto-
mated detection of faults in sewers using cctv image
sequences. Automation in Construction.
Pan, G., Zheng, Y., Guo, S., and Lv, Y. (2020). Auto-
matic sewer pipe defect semantic segmentation based
on improved u-net. Automation in Construction,
119:103383.
Piciarelli, C., Avola, D., Pannone, D., and Foresti, G. L.
(2019). A vision-based system for internal pipeline
inspection. IEEE Transactions on Industrial Informat-
ics, 15(6):3289–3299.
Sandler, M., Howard, A., Zhu, M., Zhmoginov, A., and
Chen, L.-C. (2018). Mobilenetv2: Inverted residu-
als and linear bottlenecks. In 2018 IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition,
pages 4510–4520.
Sinha, K. and Fieguth, W. (2006). Morphological segmen-
tation and classification of underground pipe images.
Mach. Vision Appl., 17(1):21–31.
Szegedy, C., Vanhoucke, V., Ioffe, S., Shlens, J., and Wojna,
Z. (2016). Rethinking the inception architecture for
computer vision. In 2016 IEEE Conference on Com-
puter Vision and Pattern Recognition (CVPR), pages
2818–2826.
Tan, M. and Le, Q. (2019). EfficientNet: Rethinking model
scaling for convolutional neural networks. In Chaud-
huri, K. and Salakhutdinov, R., editors, Proceedings of
the 36th International Conference on Machine Learn-
ing, volume 97 of Proceedings of Machine Learning
Research, pages 6105–6114. PMLR.
Wang, J., Sun, K., Cheng, T., Jiang, B., Deng, C., Zhao,
Y., Liu, D., Mu, Y., Tan, M., Wang, X., Liu, W., and
Xiao, B. (2019). Deep high-resolution representation
learning for visual recognition. TPAMI.
Wang, M. and Cheng, J. C. P. (2020). A unified con-
volutional neural network integrated with conditional
random field for pipe defect segmentation. Comput.-
Aided Civ. Infrastruct. Eng., 35(2):162–177.
Wang, M., Kumar, S. S., and Cheng, J. C. (2021). Auto-
mated sewer pipe defect tracking in cctv videos based
on defect detection and metric learning. Automation
in Construction, 121:103438.
Xie, Q., Li, D., Xu, J., Yu, Z., and Wang, J. (2019). Auto-
matic detection and classification of sewer defects via
hierarchical deep learning. IEEE Transactions on Au-
tomation Science and Engineering, 16(4):1836–1847.
Yin, X., Chen, Y., Bouferguene, A., Zaman, H., Al-Hussein,
M., and Kurach, L. (2020). A deep learning-based
framework for an automated defect detection sys-
tem for sewer pipes. Automation in Construction,
109:102967.
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
904
