
Shrinking the Inductive Programming Search Space with
Instruction Subsets
Edward McDaid
a
and Sarah McDaid
b
Zoea Ltd., 20-22 Wenlock Road, London, N1 7GU, U.K.
Keywords: Inductive Programming, State Space Search, Knowledge Representation.
Abstract: Inductive programming frequently relies on some form of search in order to identify candidate solutions.
However, the size of the search space limits the use of inductive programming to the production of
relatively small programs. If we could somehow correctly predict the subset of instructions required for a
given problem then inductive programming would be more tractable. We will show that this can be
achieved in a high percentage of cases. This paper presents a novel model of programming language
instruction co-occurrence that was built to support search space partitioning in the Zoea distributed
inductive programming system. This consists of a collection of intersecting instruction subsets derived from
a large sample of open source code. Using the approach different parts of the search space can be explored
in parallel. The number of subsets required does not grow linearly with the quantity of code used to produce
them and a manageable number of subsets is sufficient to cover a high percentage of unseen code. This
approach also significantly reduces the overall size of the search space - often by many orders of magnitude.
a
https://orcid.org/0000-0001-8684-0868
b
https://orcid.org/0000-0001-7643-6722
1 INTRODUCTION
The use of AI to assist in the production of computer
software is an active area of research (e.g. Xu et. al.,
2022; Nguyen & Nadi, 2022). Many current systems
are based on deep learning and recent work includes
the use of large language models such as GPT-3
(Brown et. al., 2020). These involve training on
large quantities of code although this can also raise
ethical concerns (Lemley & Casey, 2021).
Work also continues on approaches not
traditionally associated with training (Cropper et al.,
2020; Petke et. al., 2018). Inductive programing (IP)
aims to generate code directly from a specification
such as test cases (Flener & Schmid, 2008). Various
IP techniques exist but fundamentally many of these
utilise search (Kitzelmann, 2010).
Aside from trivial cases it is not possible to
determine the outcome of a computation directly
from source code without executing it. Some kind of
generate-and-test approach is therefore unavoidable.
The size of the search space has limited
IP systems to the production of relatively small
programs (Galwani et. al., 2015). A major source of
combinatorial growth in IP is the number of
instructions, comprising core language and standard
library functions, and operators. This number varies
by programming language but is frequently around
200 or more. It has been suggested that if we could
predict the subset of instructions required for a given
program then IP would be more tractable (McDaid
& McDaid, 2019).
One way to produce slightly larger programs in a
given time period is to distribute the work across
many computers. This requires the search space to
be partitioned. Partitioning on the instruction set is
attractive as most programs use a relatively small
subset of instructions. But how do we define the
subsets?
This paper presents the results of a study that
was carried out to define instruction subsets for the
Zoea IP system (McDaid & McDaid, 2021). Zoea
employs a distributed blackboard architecture
comprising many knowledge sources that operate in
parallel. Activations can already be partitioned by
instruction subsets although currently these are
coarse grained and manually specified.
578
McDaid, E. and McDaid, S.
Shrinking the Inductive Programming Search Space with Instruction Subsets.
DOI: 10.5220/0011706900003393
In Proceedings of the 15th International Conference on Agents and Artificial Intelligence (ICAART 2023) - Volume 3, pages 578-585
ISBN: 978-989-758-623-1; ISSN: 2184-433X
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

At present, Zoea can efficiently utilise up to
around 100 cores in solving a problem. Using larger
numbers of cores requires finer-grained partitioning
of the instruction set. This will also enable Zoea to
better leverage cloud-based deployment.
The strategy of deriving subsets from existing
code was seen as a potential way to make subsets
more representative of human originated software. It
was also apparent that any such subsets would need
to intersect with one another to some extent.
The number of subsets required to provide
sufficient coverage for a wide variety of programs
was unknown in advance. Based on experience in
tuning the current system hundreds to thousands of
subsets would result in acceptable performance.
The target size of the instruction subsets is an
important consideration. Smaller subsets make it
possible to find programs with fewer instructions in
in less time. However, we also need to be able to
produce programs with larger numbers of
instructions. This suggests the use of multiple sets of
instruction subsets of different sizes. The subset
sizes studied were 10 to 100 in increments of 10.
The following sections describe our approach to
the production and evaluation of instruction subsets.
We then go on to discuss some significant findings
that became apparent after this work was completed.
2 PRELIMINARIES
Let C be a source code program in a high level
imperative programming language L. C is composed
of one or more program units U - corresponding to
procedures, functions or methods. L provides a set of
instructions IL comprising built in operators, core
and standard library functions. Each U contains a set
of instructions IU where IU ⊆ IL ∧ IU ≠ Ø.
Given a collection of programs SP1 we can
enumerate the corresponding family of program unit
instruction subsets SIU where SIU ∈ P(IL) ∧ SIU
≠ Ø. (Here P refers to the power set.)
IU is said to cover U if IU is the instruction
subset for U or IU is the instruction subset for a
different U and a superset of the IU for U. Each IU
trivially covers the corresponding U. We can also
say that SIU covers SP1. Coverage for a set of
programs is quantified as the number of covered
program units divided by the total number of
program units expressed as a percentage.
Any IU that is a subset of another IU can be
removed from SIU without affecting the overall
coverage of SIU wrt SP1. Two or more IUs can be
combined to form a new derived instruction subset
ID. ID provides the same aggregate coverage as its
component IUs wrt SP1.
SID is a family of instruction subsets comprising
all IUs (that have not been removed or merged)
union all IDs. SID provides the same coverage as the
original SIU wrt SP1. We can enforce an upper limit
M1 on |IU| and an upper limit M2 on |ID| during the
creation of SID. Any U where |IU| > M1 is silently
ignored. M2 constrains which subsets of SIU (IUs)
can be combined to form IDs. Any number of IDs
can be created providing their respective component
IUs are also removed and |ID| <= M2. Once created
SID can then be evaluated in terms of the coverage it
provides wrt a different set of programs SP2.
3 APPROACH
3.1 Objectives
The primary goal of this work was to define a set of
instruction subsets to support efficient clustering in
the Zoea IP system.
Evaluation of subsets was also necessary to
ensure that they were capable of generating a wide
range of programs. The approach selected involved
cross-validating subsets generated using part of the
code sample with the entire code sample.
3.2 Method
This work began as a piece of analysis and without a
specific research question. The methodology
followed can best be characterised as descriptive
with some similarities to exploratory data analysis.
A large quantity of code was required for
instruction subset creation to ensure sufficient
variety. Ideally it should be the product of many
different developers from a variety of contexts. The
code also needs to be legally and ethically available.
GitHub (Microsoft, 2022) was identified as a
suitable source of software and it has been used in
the past for similar analyses of code (Ray et. al.,
2014). We used the largest 1,000 repositories on
GitHub (as of 13 May 2022) and limited our analysis
to Python (Martelli et al., 2017) programs only.
Python was selected on the basis that it is a fairly
popular language and the available instructions are
representative of similar languages.
In each case the complete repository was
downloaded as a zip file, extracted and non-Python
files were discarded. Each Python program was split
into program units (classes, methods, functions and
Shrinking the Inductive Programming Search Space with Instruction Subsets
579
mains) and tokenised using simple custom code
based on regular expressions. Two of the
repositories were excluded due to parsing errors.
From the identified tokens the occurrences of each
of a specific set of instructions were counted.
Instructions that have no meaning in Zoea, such as
those relating to variable assignment, were either
mapped to an equivalent instruction if possible or
else excluded. (E.g. '+=' is mapped to '+' while '=' is
excluded.) No code or other information was used in
any other way. This step output a list of instruction
names in alphabetical order for each program unit.
The analysis included 71,972 Python files
containing 15,749,416 lines of code or 580,476,516
characters. From this 886,421 program units were
identified. For each program unit the subset of
instructions it contains was recorded. Many of the
instruction subsets so identified were duplicates and
when these were removed 345,120 unique
instruction subsets remained.
During processing the instruction subsets were
filtered to remove any that are proper subsets of
another instruction subset. This left 33,823
instruction subsets. These varied in size between 1
and 74 instructions (median: 3, standard deviation:
3.67). Many of the unique instruction subsets were
very similar to one another, differing by only one or
two instructions.
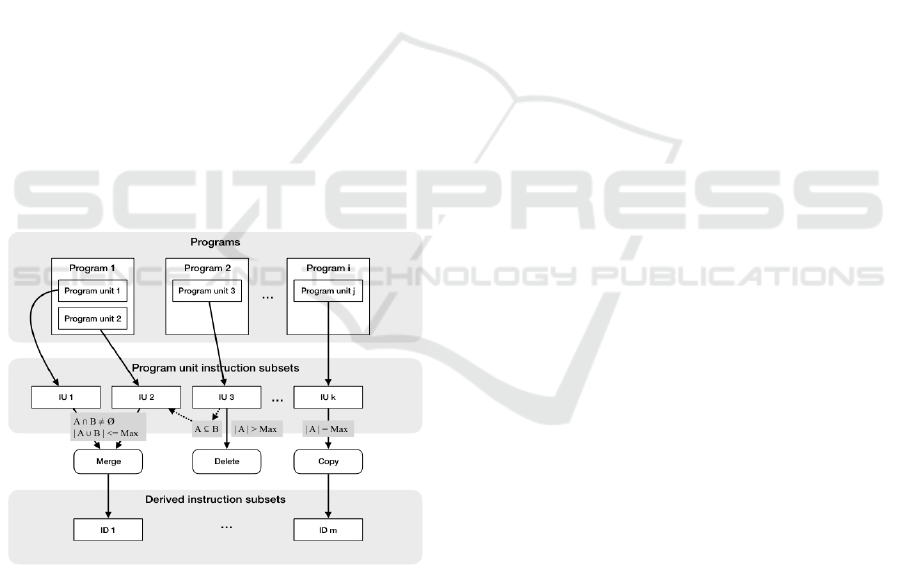
Figure 1: Overview of subset creation process.
3.3 Clustering Algorithm
Figure 1 gives a conceptual overview of the subset
creation process. Producing derived instruction
subsets (IDs) from program unit instruction subsets
(IUs) is a clustering problem. A number of different
clustering algorithms were developed and evaluated.
The end result incorporates the two most successful
of these together with some pre- and post-
processing. Pseudo-code for the software is shown
in Algorithm 1.
Every derived instruction subset is created with
respect to a specified maximum subset size. This
size limit also impacts the number of derived subsets
as described in more detail later in this section.
delete any duplicate IUs
amplify IUs (see section 3.4)
delete IUs that are subsets of IU’
foreach IU do
find Instr, Subsets where
Instr is not a subset of IU and
length(IU ∪ Instr) is maximum
Let IU = IU ∪ { Instr }
delete all IUs in Subsets
end foreach
create NumIDs empty IDs
foreach IU do
if exists( empty ID ) then
Let ID = IU
else
find IDs with max( | ID ∩ IU | )
choose ID with min( | ID | )
Let ID = ID ∪ IU
end if
end foreach
merge IDs where size <= MaxIdSize
return set of IDs
Algorithm 1: Clustering algorithm.
Input subsets are processed in decreasing order
of size. In order to improve performance all
instruction subsets are internally sorted at all times.
Pre-processing involves de-duplication,
amplification and subset removal. Amplification is
described in the next section. Many input subsets are
duplicates of which set one is retained. Any input
subset that is wholly contained within another input
subset is also removed.
The first clustering stage attempts to subsume the
largest number of near subsets by adding a single
additional instruction to each IU in turn. In choosing
which instruction to add the algorithm determines
how many other IUs will become subsets of the
current IU if that instruction is added. The
instruction that results in the removal of the greatest
number of other IUs is selected.
The second clustering stage tries to merge each
IU with the ID with which it has the greatest
intersection. This involves pre-creating a specified
number of empty IDs and then either populating the
empty IDs or else merging the IU into the ID with
both the largest intersection and the most remaining
capacity. If all IDs are at their maximum capacity
then additional empty IDs are created.
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
580
Post-processing involves merging any remaining
small IUs and non-full IDs together. This is driven
entirely by subset size and ignores similarity.
As noted already, the algorithm allows for the
specification of both a maximum subset size and a
target number of subsets. However, the number of
subsets requested is not honoured if this proves
impossible, in which case a minimal number of
additional subsets are created. For each subset size
the approximate number of subsets required is
determined in advance by code that iterates over
possible values in ascending order. The number of
subsets required is detected when the number of
subsets created equals the number of subsets
requested. Given this requires considerable time the
process has only been done in increments so the
figures obtained are approximate, within the size of
the increment.
The derived subset size that is enforced is
allowed to be somewhat larger than the maximum
by a small configurable amount – typically 10%.
Without this headroom program unit subsets of the
same size could not be merged.
3.4 Amplification
Initially, the process of merging subsets was seen as
a way to reduce the number of derived subsets and
standardize their sizes. However, it was observed
that coverage against unseen code improved
significantly after merging. This is partly because
larger subsets provide better coverage than do small
ones. Also, merging introduces additional intra-
subset instruction co-occurrence variety that would
not otherwise be present. It is interesting to note that
adding an equivalent number of random instructions
rather than merging does not give any detectable
benefit.
In order to take advantage of this phenomenon an
amplification step was introduced whereby smaller
input subsets are merged with one another before
clustering to create additional artificial program
subsets. This was not explored systematically but the
benefits do not seem to continue to accrue beyond a
50% increase in the number of subsets. Further work
in this area may be fruitful.
4 RESULTS
4.1 Input Data
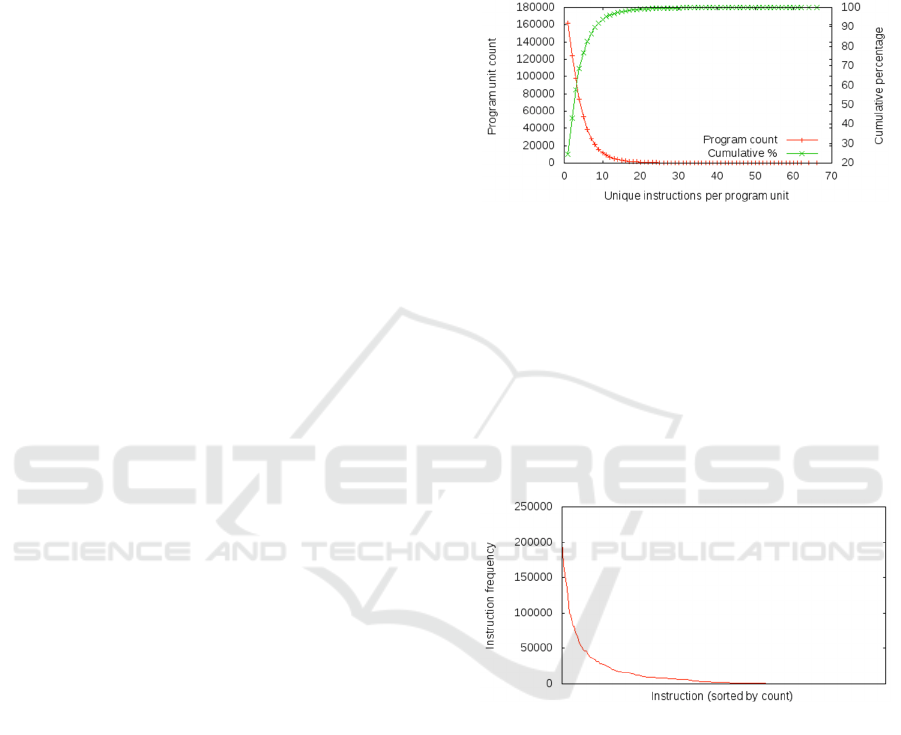
Figure 2 shows the size frequency distribution of the
program unit instruction subsets. This provides both
the numbers of subsets of different sizes and the
cumulative percentage of program units for each
subset size. From this it can be seen that around 90%
of program units have instruction subsets containing
10 or fewer unique instructions. Only 2% of
program units contain 20 or more instructions.
Figure 2: Program unit instruction subset size frequency
distribution.
Figure 3 gives the frequency distribution for
instructions across all of the code used. Here
instructions are ranked in order of descending
frequency. This shows that a small number of
instructions are used very frequently and that many
instructions are seldom used. This is similar to a
Zipfian distribution that is often associated with
human and artificial languages (Louridas et al.,
2008).
Figure 3: Ranked instruction frequency distribution.
The ranked frequency distribution for co-
occurring instruction pairs is similar to that for
instructions although it is more pronounced. Very
few instruction pairs co-occur frequently while most
occur infrequently or not at all.
4.2 Coverage of Unseen Code
By definition the derived subsets will always give
100% coverage of the code that was used to create
them. In other words, all of the instructions in each
program unit instruction subset will be found
together in at least one single derived instruction
subset. However, this is not the purpose for which
the derived subsets are created.
Shrinking the Inductive Programming Search Space with Instruction Subsets
581
To be useful the derived subsets should also
provide a high level of coverage for code that was
not used for their creation. The level of coverage for
unseen code was determined by nominating a
percentage of the input code as a training set from
which the derived subsets were then produced. The
derived subsets could then either be tested against a
different section of the input codebase or all of it.
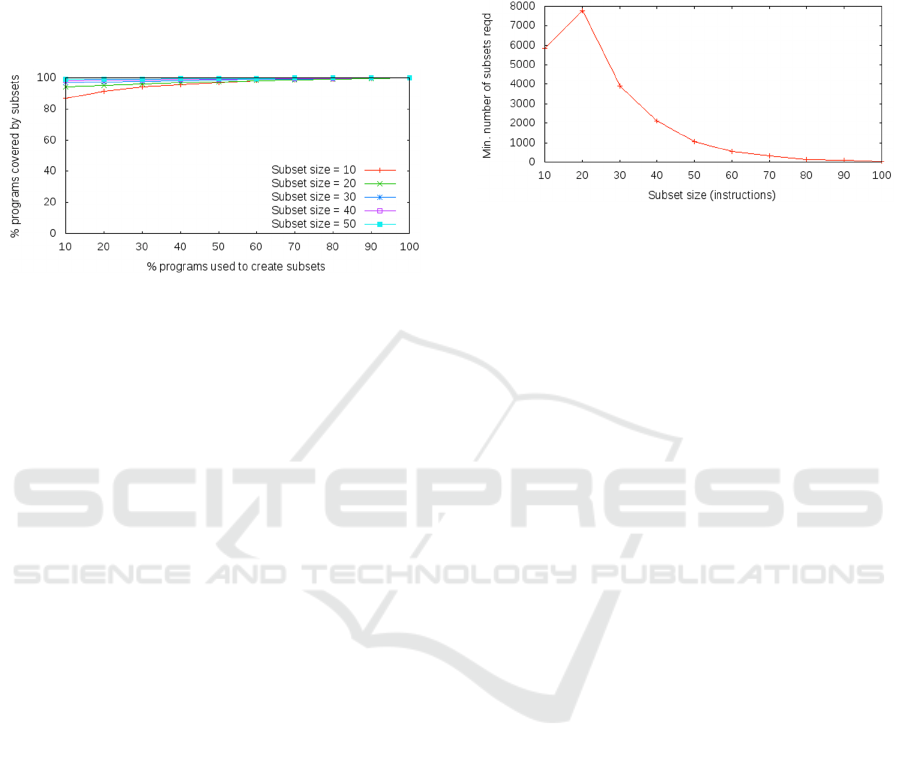
Figure 4: Unseen code coverage for different training set
percentages and subset sizes.
To understand the relative coverage that was
achieved using training sets of different sizes,
subsets were produced using 10% to 100% of the
available code in 10% increments. In each case the
derived subsets were then evaluated against the
entire codebase. These results are shown in Figure 4.
These tests were executed over 50 times and it was
soon clear that subsets produced using a relatively
small percentage of the code sample can provide
high coverage. For subset size 10 just 1% of the
code produces subsets that provide 77.31%
coverage.
Other tests - that are not reported here - were
carried out to ensure the particular section of code
from which the training set was taken had no
adverse impact on the results.
4.3 Number of Subsets
As we have already noted the number of derived
subsets required depends to a large extent on the
maximum derived subset size. Figure 5 shows the
numbers of derived subsets for various maximum
sizes. Generally, the number of subsets reduces
exponentially with increasing maximum subset size.
That the number for maximum size 10 is less than
20 is probably due to the fixed size of the derived
subset headroom in combination with the skewed
subset size distribution.
The numbers of derived subsets are acceptable in
order to support Zoea clustering. It is possible to
reduce the number of subsets further by various
means although this will also reduce the coverage
for unseen code. For example, some of the subsets
are redundant when considered solely in terms of
coverage of the training set. In addition, many
individual instructions can be removed from subsets
on the same basis.
Figure 5: Number of subsets required by subset size.
Another important factor is how the number of
required subsets grows as the size of the training set
is increased. This growth is not linear but instead
decreases with each increment. The decreasing rate
of growth suggests that subset size eventually
stabilizes rather than growing indefinitely.
4.4 Search Space Reduction
The original motivation for using instruction subsets
is to distribute work across many worker nodes in a
cluster. An unanticipated benefit is that the size of
the search space is also significantly reduced. It is
easy to see why this is the case.
The search space for code approximates to a tree
of a given depth with a branching factor largely
determined by the number of instructions. Various
approaches have been published for estimating the
size of such a search tree (Kilby et. al., 2006).
However, the reality is more complicated. Different
instructions have different numbers of arguments
and the data flows may span any number of levels
forming a graph rather than a tree.
A more accurate estimate of cumulative search
space size instead considers the number of values
generated as successive layers of instructions are
added. Inputs exist at level zero. If all instructions
are applied at each level then single argument
instructions must take their input from the previous
level whereas two argument instructions only
require one value from the previous level and
another from any level. In this approach the number
of search space nodes at a given level is the current
total number of values excluding inputs.
Figure 6 shows the impact of different subset
sizes on the size of the search space. This shows
very large reductions in search space size –
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
582
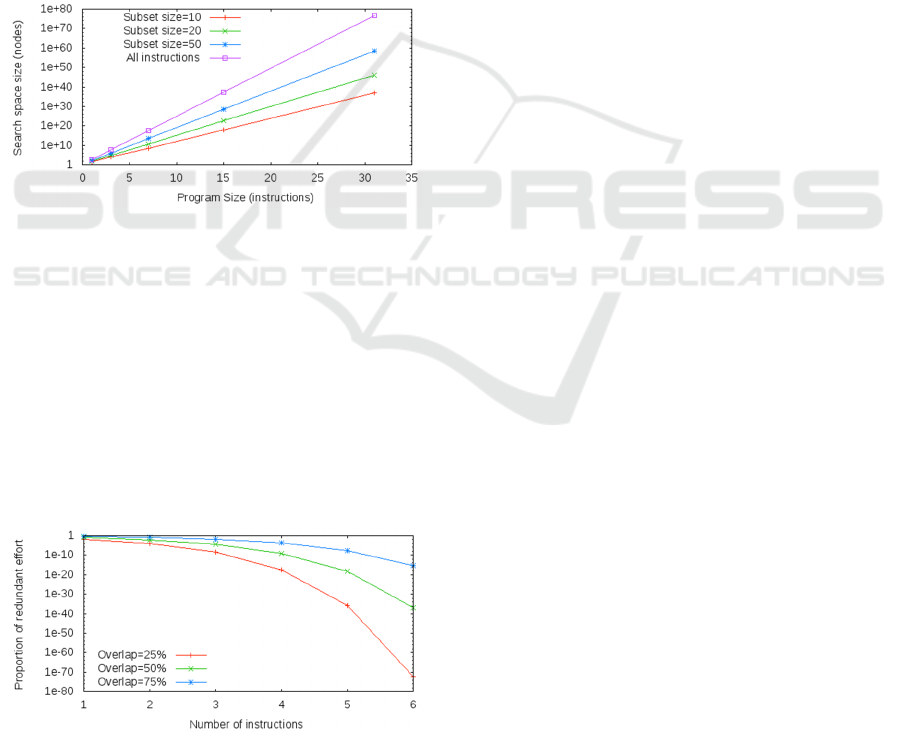
particularly for subsets of size 10. This is largely due
to the reduction in branching factor from around 200
to 10. The results in Figure 6 take account of the
number of subsets, although this makes little
difference to the relative scale of the results.
It is clear that distributing the work across a
number of nodes in this manner does not just enable
the work to be completed more quickly. It also
reduces the amount of work that needs to be done.
People seem to get by using a relatively small
proportion of all possible instruction subsets. This
means there are a great many subsets that are not
used very often - if at all. Every instruction subset,
that does not include all instructions, accounts for a
different and somewhat overlapping part of the
complete search space. Effectively it is the
instruction subsets that are not used that account for
the reduction in the size of the search space.
Figure 6: Search space reduction for different instruction
subset sizes.
4.5 Subset Overlap
Instruction subsets often overlap. This is intentional
and reflects the fact that instructions used in
different program units frequently intersect. It is also
partly due to the clustering process. The median
overlap for subset size 10 is around 20% and for size
50 is around 40%. As a result there might be a
concern that an excessive amount of effort may be
wasted when using the subsets to partition work.
Figure 7: Proportion of redundant activity for different
subset overlap percentages.
Estimation of duplicate effort uses the same
approach outlined earlier for search space size.
Duplicated work at a given level corresponds to the
size of the search space subtree for overlapping
instructions only, divided by the size of the tree for
the subset size number of instructions. Results are
shown in Figure 7.
As the search tree grows, any values that have
been produced using any non-duplicated instruction
are distinct. Thus the proportion of values at each
level that are produced exclusively from duplicated
instructions quickly becomes insignificant.
4.6 Meaning of Results
The concept of coverage is a proxy for IP success or
failure in finding a particular solution. High levels of
coverage mean that for a given set of instruction
subsets there is a correspondingly high probability
that at least one worker in the cluster will encounter
a particular IP solution.
Using only a subset of instructions rather than all
of them significantly reduces the time Zoea takes to
produce a solution. This, together with the overall
reduction in search space size and the ability to run
hundreds or possibly thousands of workers in
parallel will certainly yield a dramatic improvement
in response times. The size of programs that can be
generated in a given time are also certain to increase.
4.7 Comparative Evaluation
It would be interesting to compare our results with
other approaches such as various forms of heuristic
search and generic algorithms (Mart et al., 2018).
Distance metrics and fitness functions can be used to
guide best first search for some specific types of
program. However, no known set of distance metrics
or fitness functions covers all possible programs. In
many kinds of software the distance between a target
value and successive intermediate values has no
discernable pattern. Bi-directional search is also
impractical as the number of possible input values
for a given output can often be infinite. As a result
only comparisons with various kinds of uninformed
search can be made.
Consider a search space of size S with a
maximum depth (and upper bound on program size)
M. The simplest version of a specific program X is
known to exist within that space at depth D. Sd is the
cumulative size of the search space up to and
including D. There also exist a number N of larger
but functionally equivalent variants Vn of X between
depths D+1 and M. The task is to find X or
Shrinking the Inductive Programming Search Space with Instruction Subsets
583
alternatively any Vn using different kinds of search
and estimate the size of the space. See Table 1.
Depth first and breadth first search are well
known. Iterative deepening depth first search
(IDDFS) approximates the behaviour of breadth first
but although it requires less memory this is at the
cost of repeating some work.
S is considerably larger than Sd so in this case
depth first performs poorly. It can be seen that the
use of instruction subsets results in a huge reduction
in search space size. The corresponding running
time can also be expected to be considerably less.
Table 1: Comparison of search techniques.
Depth
first
IDDFS Breadth
first
Instr.
subsets
Always
finds
solution
Yes Yes Yes Yes
Best
solution
first
No Yes Yes No
Approx.
search
size
S /
(N+1)
>Sd Sd Between
Sd/10^5
and
Sd/10^40
5 DISCUSSION AND FUTURE
WORK
Much of this work was conducted as an exercise in
static code analysis rather than as a scientific
investigation. However, that does not detract from
the validity or potential significance of the results.
The frequency distributions of individual
instructions and instruction pairs can be seen as tacit
forms of software development knowledge. These
distributions are highly skewed yet it is not clear
why, or whether it has to be this way. Neither of
these topics have attracted much attention to date.
In conducting this work it became clear that
there is a key trade-off between clustering and
merging/amplification. While it is possible to
produce many fewer subsets through more
aggressive clustering this comes at the price of less
generality. We do not claim to have identified the
optimum position on this continuum and more work
in this area would be useful. However, the current
results are sufficient to support the on-going
operational deployment of this approach in Zoea.
By conceding that candidate solutions will only
come from defined subsets of instructions we are
accepting a compromise. We are willing to take any
solution, potentially produced much faster, but there
may be a small percentage of cases for which this
approach might not succeed. More work will be
required to quantify operational success in terms of
generated solutions that meet the specification.
Other approaches to producing instruction
subsets and alternative clustering algorithms are
possible. Some of these may produce smaller sets of
subsets and/or deliver greater coverage.
The authors believe that the results would also
hold for other imperative programming languages.
Most mainstream languages are very similar at the
instruction level. Intuitively, the approach should
also benefit different software development
paradigms such as logic programming. Built-in
predicates serve much the same role as instructions.
The authors also believe that the code sample
used should be representative of other code. The
sample used was large and came from many
different repositories. Additional verification with
code from other hosting sites would of course be
useful.
Some instructions occur very frequently in the
instruction subsets. One option would be to remove
the most frequent instructions from the subsets and
assume they always apply. This would have a
dramatic effect on the size and number of the
subsets. Since no clear boundary exists any
threshold could be chosen.
It is worth noting that instruction subsets are
capable of generating many more programs than
those from which they were derived. Also, lack of
coverage does not mean that an equivalent program
cannot be produced. There are many different ways
to produce a functionally equivalent program –
sometimes using different instructions.
Some of the individual subsets provide much
more program coverage than others. This
information could be used to prioritise the
assignment of cluster jobs to increase the probability
that a solution is found early.
This approach should be useful in any problem
that involves searching a program configuration
space. Integration should be a simple matter in any
software that utilises a defined list of instructions. It
is also worth considering whether a similar approach
might be useful in domains beyond IP.
Combinatorial problems are common as is the need
to partition work within clusters.
The current work considers subset construction
as an offline activity. In operational deployment this
could alternatively be a continuous process.
The only information extracted from the input
source code was an alphabetic list of instruction
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
584

names. In most cases these lists of instructions are
not unique to the code they came from. Instead they
are exceptionally common both as literal copies and
also as subsets of one another. As such there can be
no sense in which intellectual property rights or the
terms of any license have been violated.
6 CONCLUSIONS
We have described a technique for partitioning the
IP search space using instruction subsets. This
enables us to distribute IP work across many
computer cores by assigning each a distinct but
overlapping subset of instructions. Testing suggests
the subsets generalise quickly, particularly when
they are merged. Cross-validation shows they should
work well with unseen code. The approach
significantly reduces the size of the search space.
Any duplication of effort due to subset overlap
quickly becomes insignificant as program size
increases. We also believe that our approach is
ethical and does not exploit open source developers.
ACKNOWLEDGEMENTS
This work was supported by Zoea Ltd. Zoea is a
trademark of Zoea Ltd. Other trademarks are the
property of their respective owners.
REFERENCES
Brown, T. B.; Mann, B.; Ryder, N.; Subbiah, M.; Kaplan,
J.; Dhariwal, P.; Neelakantan, A.; Shyam, P.; Sastry,
G.; Askell, A.; Agarwal, S.; Herbert-Voss, A.;
Krueger, G.; Henighan, T.; Child, R.; Ramesh, A.;
Ziegler, D. M.; Wu, J.; Winter, C.; Hesse, C.; Chen,
M.; Sigler, E.; Litwin, M.; Gray, S.; Chess, B.; Clark,
J.; Berner, C.; McCandlish, S.; Radford, A.; Sutskever,
I.; Amodei, D. (2020). Language Models are Few-Shot
Learners. arXiv pre-print. arXiv:2005.14165 [cs.CL].
Ithaca, NY: Cornell University Library.
Cropper‚ A.; Dumancic, S.; Muggleton, S. H. (2020).
Turning 30: New Ideas in Inductive Logic
Programming. In Proceedings of the Twenty−Ninth
International Joint Conference on Artificial In-
telligence‚ IJCAI 2020. ijcai.org. pp. 4833–4839.
doi.org/10.24963/ijcai.2020/673.
Flener, P., Schmid, U. (2008). An introduction to
inductive programming. Artificial Intelligence Review
29(1), 45-62. doi.org/10.1007/s10462-009-9108-7.
Galwani, S.; Hernandez-Orallo, J.; Kitzelmann, E.;
Muggleton, S. H.; Schmid, U.; Zorn, B. (2015).
Inductive Programming Meets the Real World.
Communications of the ACM 58(11), 90–99. doi.org/
10.1145/2736282.
Kilby, P.; Slaney, J. K.; Thiébaux, S.; Walsh, T. (2006).
Estimating Search Tree Size. In Proceedings of the
Twenty-First National Conference on Artificial
Intelligence AAAI 2006. AAAI Press. 1014-1019.
Kitzelmann, E. (2010). Inductive programming: A survey
of program synthesis techniques. Approaches and
Applications of Inductive Programming. Lecture
Notes in Computer Science 5812, 50–73. Springer-
Verlag.
Lemley, M. A., Casey B. (2021). Fair Learning. Texas
Law Review 99(4): 743-785.
Louridas, P.; Spinellis, D.; Vlachos. V. (2008). Power
laws in software. ACM Transactions on Software
Engineering and Methodology 18(1): 1-26.
doi.org/10.1145/1391984.1391986.
Mart, R., Pardalos, P. M., Resende, M. G. C. (2018)
Handbook of Heuristics. Springer Publishing
Company. 1
st
edition.
Martelli, A.; Ravenscroft, A.; Holden, S. (2017). Python in
a Nutshell. O'Reilly Media, Inc. 3
rd
edition.
Microsoft. (2022). GitHub. https://www.github.com.
Accessed: 2022-11-06.
McDaid, E., McDaid, S. (2019). Zoea – Composable
Inductive Programming Without Limits. arXiv
preprint. arXiv:1911.08286 [cs.PL]. Ithaca, NY:
Cornell University Library.
McDaid, E., McDaid, S. (2021). Knowledge-Based
Composable Inductive Programming. In Proceedings
Artificial Intelligence XXXVIII: 41st SGAI
International Conference on Artificial Intelligence, AI
2021, Cambridge, UK, December 14–16, 2021,
Springer-Verlag. doi.org/10.1007/978-3-030-91100-
3_13.
Nguyen, N., Nadi, S. (2022). An Empirical Evaluation of
GitHub Copilot's Code Suggestions. In Proceedings of
the IEEE/ACM 19th International Conference on
Mining Software Repositories (MSR), 2022, 1-5.
doi.org/10.1145/3524842.3528470.
Petke, J.; Haraldsson, S.; Harman, M.; Langdon, W. B.;
White, D.; Woodward, J. (2018). Genetic
Improvement of Software: a Comprehensive Survey.
IEEE Transactions on Evolutionary Computation.
22(3): 415-432. doi.org/10.1109/TEVC.2017.
2693219.
Ray, B.; Posnett, D.; Filkov, V.; Devanbu, P. (2014). A
large scale study of programming languages and code
quality in github. In Proceedings of the 22nd ACM
SIGSOFT International Symposi-um on Foundations
of Software Engineering (FSE 2014). Association for
Computing Machinery. 155–165. doi.org/10.1145/
2635868.2635922.
Xu, F. F.; Alon, U.; Neubig, G.; Hellendoorn, V. J. (2022).
A systematic evaluation of large language models of
code. In Proceed-ings of the 6th ACM SIGPLAN
International Symposium on Machine Programming.
Association for Computing Machinery. 1–10. doi.
org/10.1145/3520312.3534862.
Shrinking the Inductive Programming Search Space with Instruction Subsets
585
