
A Fine-Tuning Aggregation Convolutional Neural Network Surrogate
Model of Strategy Selecting Mechanism for Repeated-Encounter
Bilateral Automated Negotiation
Shengbo Chang
a
and Katsuhide Fujita
b
Department of Electrical Engineering and Computer Science, Faculty of Engineering,
Tokyo University of Agriculture and Technology, Koganei, Tokyo, Japan
Keywords:
Automated Negotiation, Strategy Selecting Mechanism, Surrogate Model, Fine-Tuning.
Abstract:
Negotiation with the same opponent for multiple times for each in a different domain commonly occurs in real
life. We consider this automated negotiation problem as repeated-encounter bilateral automated negotiation
(RBAN), in which it is essential to learn experiences from the history of coping with the opponent. This
study presents a surrogate-model-based strategy selecting mechanism that learns experiences in RBAN by
fine-tuning the proposed aggregation convolutional neural network (CNN) surrogate model (ACSM). ACSM
is promised to assess strategies more precisely by applying CNN to extract features from a matrix showing the
outcomes’ utility distribution. It ensures the abundance of extracted features by aggregating multiple CNNs
trained with diverse opponents. The fine-tuning approach adapts ACSM to the opponent in RBAN by feeding
the present negotiation results to ACSM. We evaluate ACSM and the fine-tuning approach experimentally
by selecting a strategy for a time-dependent agent. The experiments of negotiating with four Automated
Negotiating Agents Competition (ANAC) champions and six basic agents are performed. ACSM is tested on
600 negotiation scenarios originating from ANAC domains. The fine-tuning approach is tested on 60 RBNA
sessions. The experimental results indicate that ACSM outperforms an existing feature-based surrogate model,
and the fine-tuning approach is able to adapt ACSM to the opponent in RBAN.
1 INTRODUCTION
Negotiations with the same opponent multiple times
in a new domain each time happen in real life. For
example, a retailer may need to negotiate with one
diverse product supplier about the price, diversities,
and amount in each season as the preference of cus-
tomers change (Chkoniya and Mateus, 2019). More-
over, the identity of the opponent negotiating with is
known in the setting of the Automated Negotiation
League in the Automated Negotiating Agents Com-
petition (ANAC) 2022 (Aydogan et al., 2022), in-
dicating that candidates could change their strategies
by learning from their past experience with the given
opponent. In this study, we consider the strategy se-
lection of the repeated-encounter bilateral automated
negotiation (RBAN, i.e., a sequence of bilateral au-
tomated negotiation with the same opponent multiple
times and each time in a different scenario) (Renting
et al., 2022).
There is no single strategy that could dominate
a
https://orcid.org/0000-0001-6992-7566
b
https://orcid.org/0000-0001-7867-4281
all possible settings (Ilany and Gal, 2016). Previous
studies (Baarslag et al., 2012; Baarslag et al., 2013;
Ya’akov Gal and Ilany, 2015) demonstrated that the
best negotiation strategy varies with the negotiation
scenario, even for the same opponent. Therefore, se-
lecting the optimal strategy for each scenario is essen-
tial in RBAN. The similar behavior pattern of the op-
ponent in different scenarios is a distinguishable fea-
ture of RBAN that asks negotiators to use their expe-
rience and learn from the negotiation history to cope
with the opponent. Though several studies focused on
strategy selection (Ilany and Gal, 2016; Kawata and
Fujita, 2020; Wu et al., 2021; Baarslag et al., 2013;
Sengupta et al., 2021; Renting et al., 2020; G
¨
unes¸
et al., 2017; Fujita, 2014; Fujita, 2018), few consid-
ered the problem of RBAN to the best of our knowl-
edge.
Surrogate models, generally used in algorithm se-
lection, predict the outputs for unknown algorithm pa-
rameter inputs by regressing the known inputs with
outputs. A surrogate model for strategy selection
in automated negotiation usually uses the negotiation
scenario features and a strategy configuration as input,
Chang, S. and Fujita, K.
A Fine-Tuning Aggregation Convolutional Neural Network Surrogate Model of Strategy Selecting Mechanism for Repeated-Encounter Bilateral Automated Negotiation.
DOI: 10.5220/0011701300003393
In Proceedings of the 15th International Conference on Agents and Artificial Intelligence (ICAART 2023) - Volume 2, pages 277-288
ISBN: 978-989-758-623-1; ISSN: 2184-433X
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
277

and its output is the predicted evaluation value (Ilany
and Gal, 2016; Renting et al., 2020). For the given ne-
gotiation scenario, existing surrogate models use ex-
pert scenario features to predict the performance of a
strategy configuration (Ilany and Gal, 2016; Renting
et al., 2020; Renting et al., 2022). Since these fea-
tures relied on human intuition, prediction accuracy
is usually lost to some extent. The 2-dimension out-
come space (our agent utility - the opponent utility)
of a negotiation scenario could represent the scenario
exhaustively. Additionally, convolution neural net-
works (CNN) can be trained to extract useful features
from the 2D outcome space automatically. Therefore,
training the CNN to extract scenario features is a fea-
sible way of overcoming the disadvantages of human
intuition.
This study extends the existing strategy selecting
mechanisms with a CNN-based surrogate model and
an online learning method for RBAN. The contribu-
tions of this study are as follows:
• An approach of extracting scenario features with
CNN on a discrete size-fixed outcome distribu-
tion map which indicates the number of outcomes
falling within bins of a predefined utility range.
• A surrogate model (ACSM) aggregates multi-
ple CNN-components that implement the feature-
extracting approach trained with diverse oppo-
nents, ensuring the robustness and feature abun-
dance when against an unknown opponent. A
fine-tuning approach adapts the proposed surro-
gate model to the facing opponent in RBAN effi-
ciently.
• The feature-extracting approach is validated ex-
perimentally by comparing ACSM with an expert-
feature-based neural network surrogate model
(NNSM) in various scenarios of single negotia-
tion. The fine-tuning approach is validated exper-
imentally by comparing ACSM with fine-tuning
with one without fine-tuning in RBAN.
The remainder of this paper is structured as fol-
lows: Section 2 presents related works; Section 3
presents RBAN; Section 4 introduces ACSM with the
proposed feature-extracting method; Section 5 intro-
duces the strategy selecting mechanism of fine-tuning
ACSM for RBAN; Sections 5 demonstrates the exper-
imental results; Section 6 summarizes this paper and
discusses future possibilities.
2 RELATED WORK
This work focuses on strategy selection for each ne-
gotiation scenario in RBAN. The area related mostly
is strategy selection in automated negotiation.
(Ilany and Gal, 2016) proposed a Meta-agent that
includes a strategy portfolio used in the ANAC. They
proposed several expert features to help build sur-
rogate models for evaluating negotiation strategies
in the given scenarios. Additionally, they extended
them to an online reinforcement learning version,
when the learned model is flawed. They trained the
surrogate model to predict the average performance
when against a set of opponents. Extending their
work, (Renting et al., 2020) introduced the sequen-
tial model-based optimization mechanism for general
algorithm configuration to select strategy parameters
for a dynamic agent under a set of opponents and do-
mains. The mechanism searches the configuration
space accelerated by an expert-feature-based surro-
gate model. They also applied AutoFolio to con-
struct a strategy selector by domain and opponent fea-
tures (Renting et al., 2022). These studies rely on
the feature-based surrogate model. However, in this
study, we consider a new way of extracting negotia-
tion setting features with CNN.
(Fujita, 2018) proposed an approach to estimate
the opponent strategy and preference in multiple
times negotiation that could achieve better Pareto ef-
ficiency. (Kawata and Fujita, 2020) employed a re-
inforcement learning method to select the strategy for
multiple times negotiation inspired by (Ilany and Gal,
2016). (Taiji and Ikegami, 1999) proposed a strat-
egy for the repeated prisoner’s dilemma game that
uses a recurrent neural network to predict future in-
teractions with each other. This strategy optimizes
the next moves in the game. These works are ap-
plicable for the repeated negotiation where the oppo-
nent and negotiation domain are fixed. (G
¨
unes¸ et al.,
2017) applied boosting on bidding and acceptance
strategies. They proposed two versions of boosting
learning: learning to select a strategy and learning to
combine the output of different strategies. (Sengupta
et al., 2021) proposed an adaptive strategy switching
mechanism for their autonomous negotiating agent
framework. This mechanism could classify the op-
ponent in a negotiation scenario and use the expert
recommendation to select the coping strategy. Their
results show that they can outperform most existing
genius negotiators. Similarly, (Wu et al., 2021) pro-
posed a negotiating agent framework that leverages
Bayesian policy reuse in a negotiation. This frame-
work could recognize the opponent and give a cop-
ing policy or build a new policy when facing an un-
seen opponent. These works focused on the strategy
of coping with an opponent in a negotiation scenario,
and they do not consider the RBAN case.
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
278

3 REPEATED-ENCOUNTER
BILATERAL AUTOMATED
NEGOTIATION
This work considers selecting a strategy from a strat-
egy portfolio for an agent in RBAN. Each negotia-
tion in RBAN is a bilateral automated negotiation that
consists of a negotiation protocol, a negotiation sce-
nario, and two negotiators. The negotiation protocol
and scenario settings in this paper adopt the bilateral
negotiation settings commonly used to evaluate ne-
gotiation strategies in literature (Ilany and Gal, 2016;
Baarslag et al., 2013; Renting et al., 2020; Renting
et al., 2022; Sengupta et al., 2021; Wu et al., 2021).
The negotiation protocol is the alternating offers
protocol (AOP) (Rosenschein and Zlotkin, 1994), in
which negotiators take turns to make an offer, ac-
cept an offer, or walk away. This continues until the
deadline is reached or one negotiator agrees or walks
away. The deadline can be measured in the number of
rounds or real wall-time. The negotiation scenario in-
cludes a negotiation domain and two preference pro-
files. The domain is public information. A preference
profile is unique and private information only known
to its corresponding negotiator.
A domain D defines a set of issues I =
{I
1
, . . . , I
i
, . . . , I
n
issues
} with possible values V
I
i
=
{v
I
i
1
, . . . , v
I
i
j
, . . . , v
I
i
k
i
}, where n
issues
is the number of
issues, and k
i
is the number of values for issue I
i
.
A set of values for each issue is referred to as an
outcome ω. Ω is the set of all possible outcomes.
A preference profile maps each outcome with a real
value in [0, 1] usually in the form of a utility function.
This paper adopts the linear additive utility function
U(ω) =
∑
n
i=1
w
I
i
e
I
i
(ω[I
i
]) with a reservation value r,
where w
I
i
is the weight of issue I
i
(
∑
n
i=1
w
i
= 1); e
I
i
(·)
is a function that maps the values of issue I
i
to real
numbers in [0, 1]; a negotiator will obtain its reserva-
tion value if no agreement is reached.
RBAN is a sequence of negotiations with the
same opponent under AOP. A negotiation in RBAN
could be denoted as a function π(θ, S) of a strat-
egy θ and a scenario S = (Ω,U
n1
,U
n2
, r
n1
, r
n2
). The
strategy selecting problem for a negotiation sce-
nario S
i
in a RBAN negotiation sequence Π
q
=<
π
1
, . . . , π
i
, . . . , π
q
>:
argmax
θ
j
∈Θ
{U
i
our
(ω
j
)|ω
i
j
← π
i
(θ
j
, S
i
), Π
i
}
where Π
i
= < π
1
, π
2
, . . . , π
i−1
> is a subset of
the Π
q
, meaning the negotiations before π
i
; Θ =
{θ
1
, θ
2
, . . . , θ
n
s
} is the strategy space of an agent; and,
θ is a strategy configuration that contains a set of nu-
merical or categorical parameters.
4 AGGREGATION CNN
SURROGATE MODEL
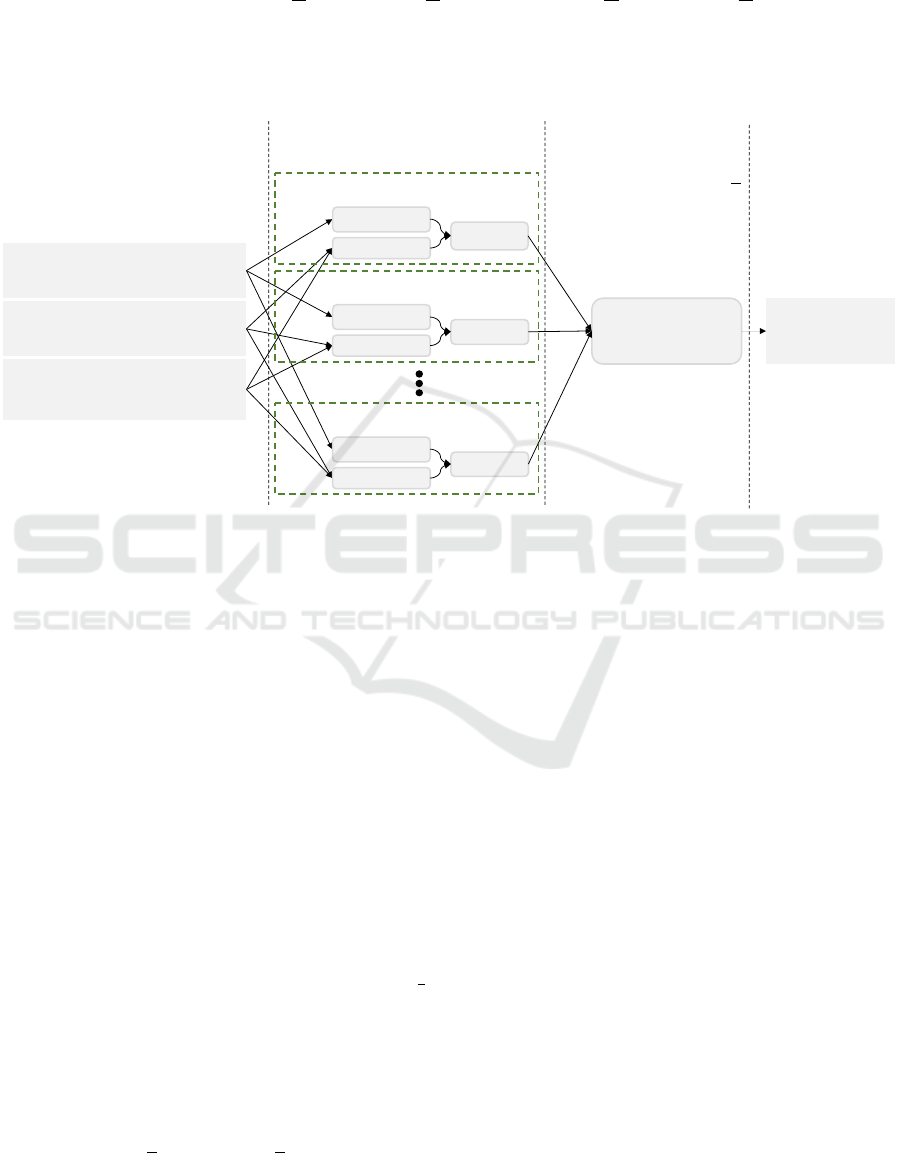
Figure 1 shows the structure of the proposed
ACSM. An ACSM contacts several pre-trained CNN-
components with an input layer in parallel and com-
pacts their outputs with an aggregation layer. The out-
put of the aggregation layer is the estimated agree-
ment utility.
The input layer includes a discrete outcome-
utilities matrix U, reservation values [r
n
1
, r
n
2
], and a
strategy configuration θ. The strategy configuration θ
could be real numbers representing real-valued strate-
gies or one-hot encoded vectors representing categor-
ical strategies. The discrete outcome-utilities matrix
U (m × m) is calculated from the outcome utilities.
Each element U
j,k(1≤ j≤m,1≤k≤m)
in U indicates the
number of outcomes in the corresponding utility bins
and could be calculated using Equation 1. Figure 2
shows an example of transforming the outcome space
to U (5 × 5). Mapping the outcome utility distribu-
tion to a size-fixed matrix that indicates the number
of outcomes falling within utility bins of predefined
makes the CNN-components applicable to domains
of different sizes and reduces the computing cost of
convolution.
A CNN-component, denoted C
A
i
(·) in Equation 2,
is already trained by the negotiation history data with
an opponent A
i
before integrating into ACSM. Each
CNN-component is trained with a unique opponent
agent. The output of a CNN-component C
A
i
(·) is
the estimated agreement utility of applying the in-
put strategy on the input negotiation scenario when
against the opponent agent A
i
. In the training phase,
labels are the real obtained agreement utilities of ap-
plying negotiation strategies on scenarios against the
opponent agent A
i
.
b
u
A
i
θ
j
= C
A
i
(U, r
own
, r
A
i
, θ
j
), j = 1, . . . , n
s
(2)
The aggregation layer is a sigmoid-activated neu-
ron, ensuring the output is scaled to [0, 1]. Its out-
put is positively correlated to the weighted summation
of the outputs of the aggregated CNN-components
(Equation 3). Its weights are the online trainable pa-
rameters, which make a trade-off between the aggre-
gated CNN-Components. ACSM is expected to be
able to fit different opponent agents by adjusting the
weights.
ˆu
θ
= ACSM(T )
= sigmoid(
n
∑
i=1
w
A
i
C
A
i
(T )) ∝
n
∑
i=1
w
A
i
C
A
i
(T )
(3)
where T = (U, r
n
1
, r
n
2
, θ
l
); C
A
i
(·) denotes a CNN-
component trained with an opponent agent A
i
; n is
A Fine-Tuning Aggregation Convolutional Neural Network Surrogate Model of Strategy Selecting Mechanism for Repeated-Encounter
Bilateral Automated Negotiation
279
U
j,k
=
{ω
i
∈ Ω i f b
lower
n
1
, j
≤ U
n
1
(ω
i
) ≤ b
upper
n
1
, j
and b
lower
n
2
,k
≤ U
n
2
(ω
i
) ≤ b
upper
n
2
,k
}
b
lower
n
1
, j
= ( j − 1)×
1
m
, b
upper
n
1
, j
= j ×
1
m
, b
lower
n
2
,k
= (k − 1) ×
1
m
, b
upper
n
2
,k
= k ×
1
m
( j = 1, 2, . . . , m; k = 1, 2, . . . , m) (1)
where U
j,k(1≤ j≤m,1≤k≤m)
is an element in U shows the number of outcomes in the corresponding utility bin.
CNN-component with
𝐴
!
CNN2D
NN
NN
CNN−component with 𝐴
"
CNN2D
NN
NN
CNN−component with 𝐴
#
CNN2D
NN
NN
Agreement
utility 𝑢"
Hidden Layer
𝐀𝐍
𝑤
!
𝑤
"
𝑤
#
Initial:
𝑤
!
= ⋯ = 𝑤
#
=
!
#
A Strategy
𝜃
Discrete outcome
utilities matrix 𝕌'
Inputs
Reservation values
[𝑟
!
!
, 𝑟
!
"
]
CNN-components Aggregation Output
Figure 1: Structure of the proposed ACSM. CNN-component with A
i
means it is trained with the negotiation data against the
opponent A
i
.
the number of aggregated CNN-components.
5 STRATEGY SELECTING
MECHANISM OF
FINE-TUNING ACSM
Figure 3 demonstrates a strategy selecting mechanism
of ACSM with fine-tuning (F-ACSM) for RBAM.
There are three primary procedures in the mecha-
nism: initialize ACSM, select a strategy using ACSM
with Monte-Carlo method, and fine-tune the surrogate
model after each negotiation.
Initialize ACSM. Selecting the strategy that can
perform averagely best before getting any informa-
tion about the facing opponent is rational; hence, the
weights of the aggregation layer are initialized to
1
n
(n is the number of CNN-Components). The output
of initial ACSM is positively correlated with the mean
value of all component outputs (see Equation 4).
ˆu
θ
= ACSM
0
(C
A
1
(T ),C
A
2
(T ), . . . ,C
A
n
(T ))
= sigmoid(
1
n
n
∑
i=1
C
A
i
(T )) ∝
1
n
n
∑
i=1
C
A
i
(T )
(4)
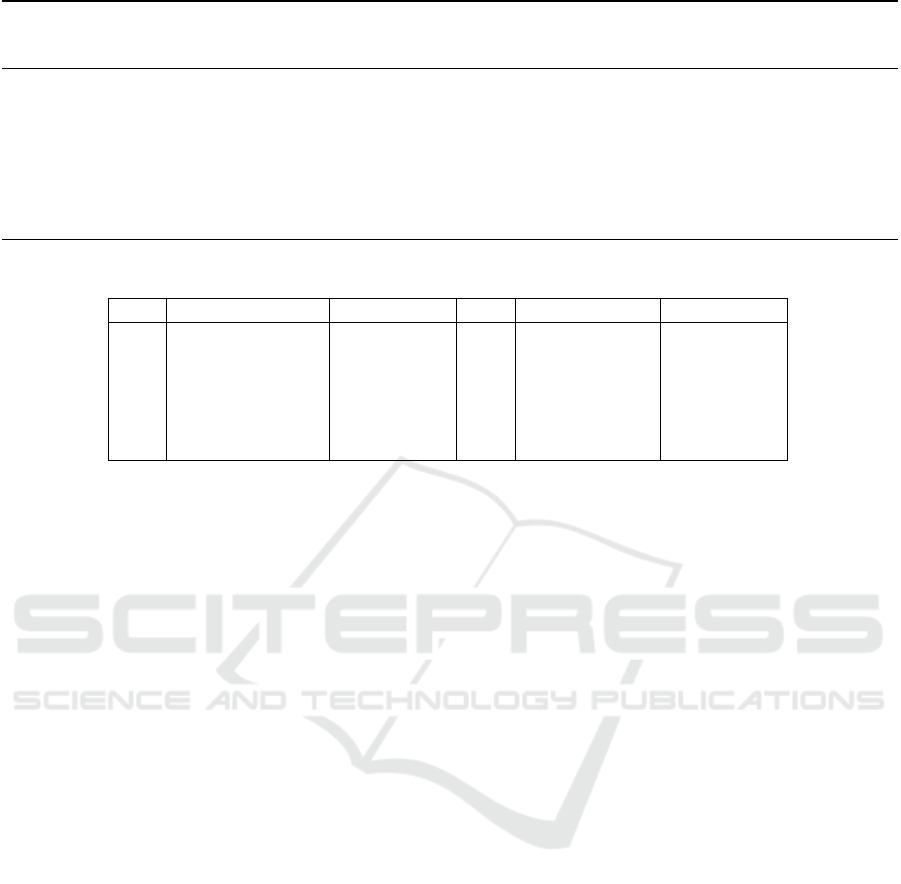
Select a strategy with ACSM. The mechanism pre-
dicts the performance of all possible strategies with
ACSM and selects the one with best prediction. To
predict the performance of strategies for a given ne-
gotiation scenario, ACSM needs the reservation val-
ues and U as inputs, whereas the opponent’s reserva-
tion value and utility function are private information.
One feasible way of overcoming the private informa-
tion is to sample the unknown part and select the strat-
egy that performs better on the samples, i.e., Monte
Carlo method (Figure 4). In this multiple issue lin-
ear additive utility case, a sampling assigns a weight
w
I
i
and generates a mapping function e
I
i
(v
I
i
j
), v
I
i
j
∈ V
I
i
for each issue I
i
∈ I under restrictions (Table 1). The
e
I
i
(v
I
i
j
) maps a random number to each possible issue
value v
I
i
j
∈ V
I
i
. The first proposal restriction assumes
an opponent would like to propose the bid that maxi-
mizes its utility at the first step (Baarslag et al., 2012;
Baarslag et al., 2013; Ya’akov Gal and Ilany, 2015).
After sampling, each strategy θ
k
∈ Θ is evaluated us-
ing ACSM on all the samples. The average output on
the samples is seen as the predicted performance of a
strategy.
Fine-tune ACSM. The proposed fine-tuning ap-
proach adjusts the weights of the aggregation layer of
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
280
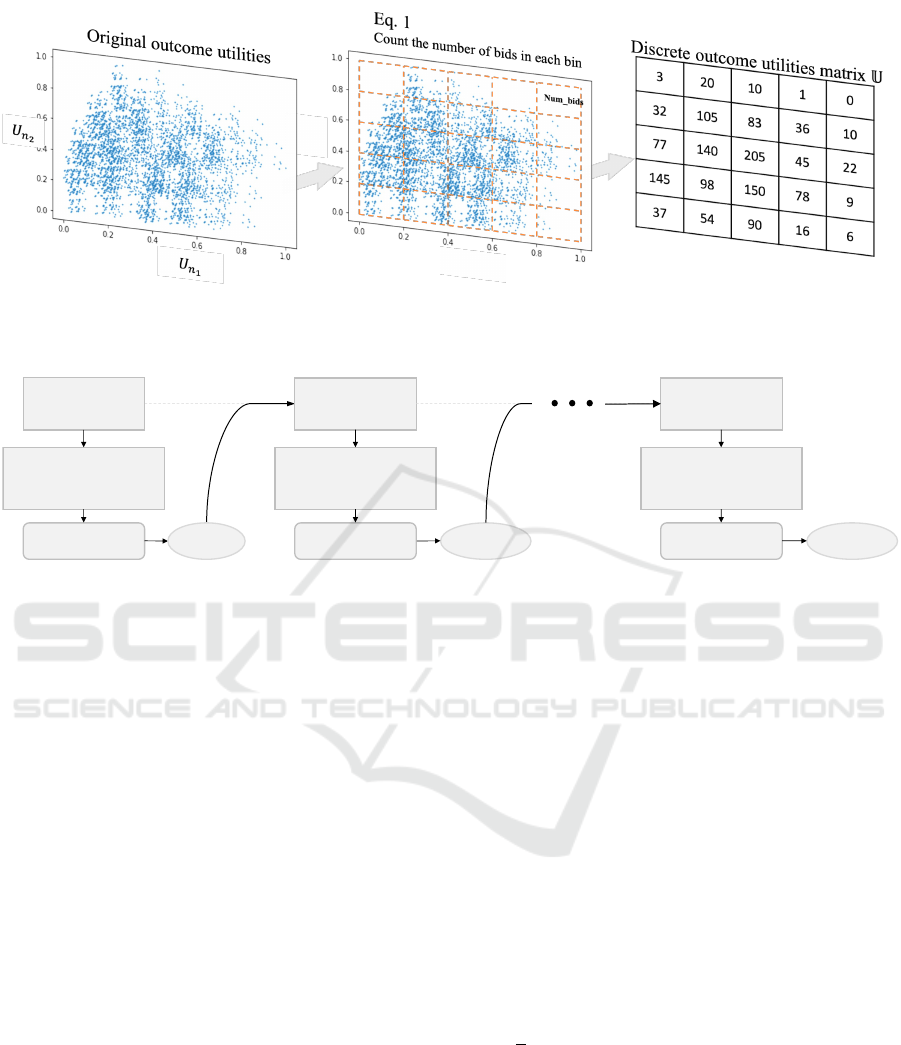
Figure 2: Example of transforming the original outcome utilities to U (5 × 5), where each index on the axis correspond to a
utility range of the negotiator. The integers filled in the matrix indicate the number of outcomes in the corresponding utility
bin.
Fine-tuned
𝐀𝐂𝐒𝐌
𝟏
Negotiation 1
Strategy Selection
Evaluated by Monte-
Carlo Method
Initialize
𝐀𝐂𝐒𝐌
𝟎
Fine-Tune
Negotiation 2
Strategy Selection
Evaluated by Monte-
Carlo Method
Result
Fine-tuned
𝐀𝐂𝐒𝐌
𝐧$𝟏
Negotiation n
Strategy Selection
Evaluated by Monte-
Carlo Method
Result
Fine-Tune
Result
Figure 3: Procedures of the strategy selecting mechanism of F-ACSM model in a RBAN session with n negotiation scenarios.
ACSM after each negotiation (Algorithm 1). First, the
Hardheaded opponent model (HOM) (Van Krimpen
et al., 2013) estimates the opponent utility function
ˆ
U
k
opp
by feeding with the opponent’s bidding history
BH
k
. Then, a
ˆ
U
k
is calculated with the
ˆ
U
k
opp
as Equa-
tion 1. The estimated opponent reservation value ˆr
k
opp
is the minimum estimated utility in the opponent’s
bidding history BH
k
calculated by the
ˆ
U
k
opp
. Finally,
the back-propagation optimizer fine-tunes the aggre-
gation layer of ACSM by using
ˆ
U
k
and ˆr
k
opp
as in-
puts, and the actual utility obtained in π
k
as the ex-
pected output. Suppose the diversity of the CNN-
components of an ACSM is enough. In that case, the
behavior pattern of the facing opponent agent must be
similar to one or a combination of the training agents.
Therefore, adjusting the aggregation layer weights of
the ACSM could adapt it to the opponent agent even
unknown.
6 EXPERIMENTS
Two experiments of selecting a strategy for a time-
dependent agent were performed to evaluate ACSM
and F-ACSM, respectively. One experiment of single
negotiations compared ACSM with an expert-feature-
based neural network surrogate model (NNSM) im-
plemented by ourselves using the same features as
in (Ilany and Gal, 2016), showing the capability of
the CNN-feature-based surrogate model. Another one
of RBAN compared ACSM-only with F-ACSM, pre-
senting the effect of the fine-tuning approach. Both
of them applied diverse negotiation scenarios and op-
ponent agents. All experiments were performed on
NegMAS of Python (Mohammad et al., 2020).
6.1 Experimental Setup
We evaluated the proposed methods by selecting a
parameter for a time-dependent agent using only
a time-dependent strategy. This time-dependent
strategy is generally adopted by many advanced
agents (Ya’akov Gal and Ilany, 2015) and can notice-
ably affect negotiation results. The time-dependent
strategy (Faratin et al., 1998) follows a function: U
t
=
1 −
t
T
e
, where T is the maximum negotiation time,
and e controls the concession pattern. The lower value
of e means that the concession is faster at the start,
slower at the end, and vice versa. Usually, e is set
in [0.1, 5.0]. We limit the strategy space to range e ∈
[0.1, 0.2, 0.3, 0.4, 0.5, 0.6, 0.7, 0.8, 0.9, 1.0, 1.1, 1.2,
1.4, 1.6, 1.8, 2.0, 2.5, 3.0, 4.0, 5.0]
The scenarios for evaluation are from 12 domains
of ANAC 2013 (Table 2). Those scenarios are gen-
erated uniformly at random, covering multiple situa-
A Fine-Tuning Aggregation Convolutional Neural Network Surrogate Model of Strategy Selecting Mechanism for Repeated-Encounter
Bilateral Automated Negotiation
281
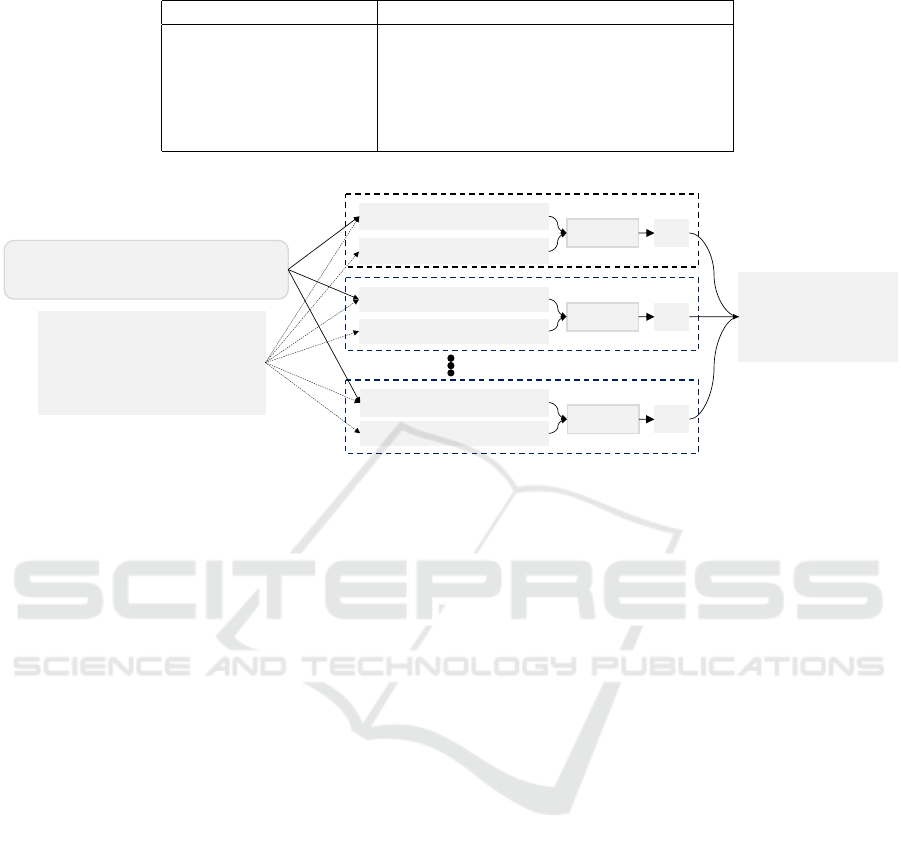
Table 1: Restrictions when sampling the opponent preference profile.
Name of restriction Equation
Each weight range 0 < w
I
i
< 1
Total weights
∑
I
i
∈I
w
I
i
= 1
Value mapping function 0 ≤ e
I
i
(v
I
i
j
) ≤ 1
First proposal e
I
i
(v
I
i
j
) = 1 i f v
I
i
j
in ω
f irst
, v
I
i
j
∈ V
I
i
, I
i
∈ I
Reservation value r
opp
= [0.0, 1.0]
Sample1:
!"
!
#$
"##
%
&
$
, $
"%&
'()*
+,
!
Evaluation of -
𝒌
.+,
(
&
( )!
Sample n:
!"
&
/#$
"##
%
&
$
, $
"%&
'()* +,
&
Sample 2: !"
*
/#$
"##
%
&
$
, $
"%&
'()*
+
,
*
Sampling restricted by 0
+(,-.
/:
1
"##
#$
"##
Known:
Own reserved value $
"%&
Own utility function 1
"%&
Outcomes 2
Figure 4: Evaluation of θ
k
∈ Θ in a negotiation scenario. ω
f irst
denotes the first bid from the opponent.
tions. The average conflict level is 0.501 with a stan-
dard deviation of 0.132. The conflict levels of 94.4%
scenarios are located in [0.237, 0.765].
Opponent agents for evaluation are ten differ-
ent agents (Table 3) including four ANAC champi-
ons (Baarslag et al., 2012; Fujita et al., 2013; Mori
and Ito, 2017; Aydo
˘
gan et al., 2020) and six basic
agents (Faratin et al., 1998).
Comparing the strategy-selecting mechanism ap-
plying the initial ACSM with one applying the expert-
feature-based NNSM is a feasible way of illustrat-
ing the effects of the proposed CNN-based feature-
extracting approach. The performance metrics are the
agreement utility, social welfare, and agreement ra-
tio. Their values are the average of ten times repeated
for a negotiation setting. The expert features referred
to (Ilany and Gal, 2016) are presented in Table 4. We
tested ACSM using three different numbers of Monte
Carlo samples: 10, 20, and 30. We found that the dif-
ferences between 20 and 30 were minimal, so we ulti-
mately chose to use 20 Monte Carlo samples. We set
the shape of U to 100 × 100, as this size was found to
be a good balance between training time and perfor-
mance when compared to 10 × 10 and 1000 × 1000,
which were all tested.
Performing the strategy selecting mechanisms ap-
plying fine-tuned ACSM and the initial ACSM on
RBAN sessions could present the performance of
ACSM with and without fine-tuning. One RBAN ses-
sion included 50 scenarios randomly sampled from
the 600 scenarios. 60 RBAN sessions were sampled
for testing, avoiding the randomness of one RBAN
session. The experiments with ten different opponent
agents were performed to demonstrate the efficiency
of fine-tuning against different opponent agents. The
average agreement utility of 20 times repeats of a ses-
sion was used as the performance metric. We set the
learning rate for fine-tuning to 0.01, as this value was
found to perform the best among 0.001, 0.01, and 0.1,
which were all tested.
6.2 Training
Six CNN-components are integrated into the ACSM,
each trained with a unique opponent agent to predict
the agreement utility for a scenario against that agent.
The output of the initial ACSM equals the average
value of the CNN-components. The baseline method
(NNSM) is trained with the scenario’s average agree-
ment utility of the same opponent agents used for
training CNN-components.
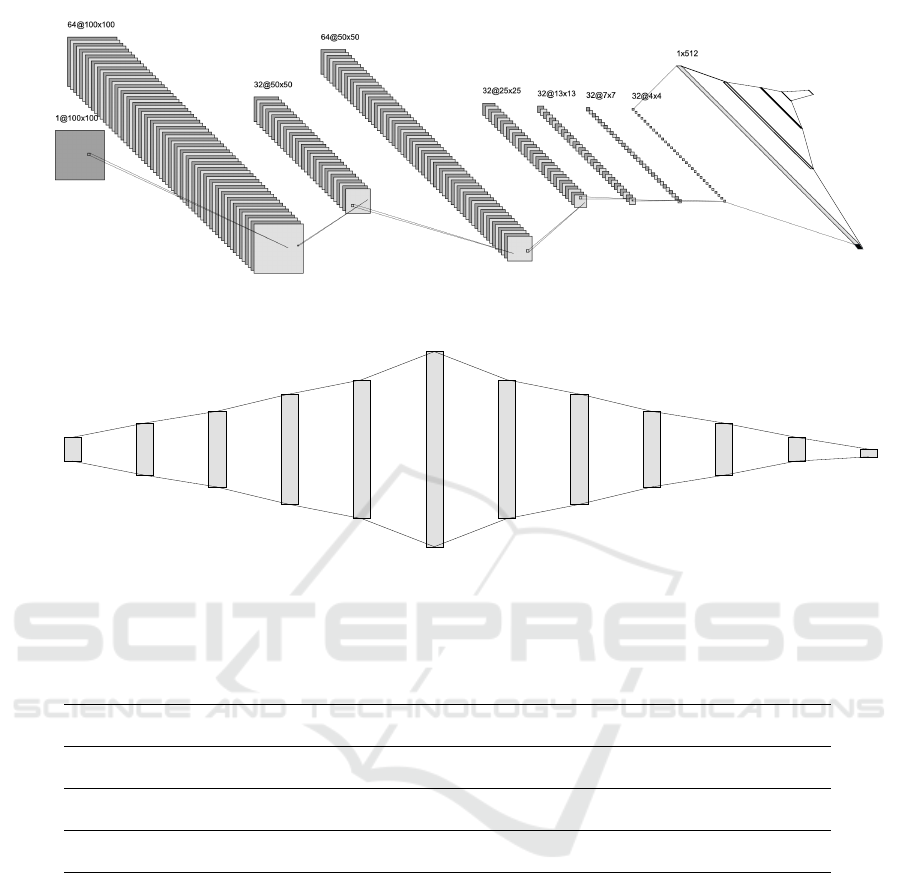
The applied architectures of CNN-component
(Figure 5. a) and NNSM (Figure 5. b) are selected
from ten different architectures designed intuitionally.
Interestingly, we found that a down-sampling layer of
Conv2D (stride = 2) outperforms the one of pooling
in learning scenario features.
The 3000 scenarios of training, uniformly ran-
domly sampled from the 12 domains, are ensured to
be different from those for evaluation. The evalua-
tion used both the basic agents and ANAC champi-
ons, while the training used only six basic agents (Ta-
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
282
Algorithm 1: Fine-tuning after a negotiation π
k
. Ω
k
is the outcome space, θ
k
is the used strategy, ω
k
is the agreement outcome,
if no ω
k
then U
k
own
(ω
k
) = 0, BH
k
is the opponent bidding history, α is the learning rate, U
k
own
is own utility function and r
k
own
is own reservation value, HOM is the hardheaded opponent model.
Require: Ω
k
, θ
k
, ω
k
, BH
k
, α,U
k
own
, r
k
own
, ACSM
k−1
, HOM
Ensure: ACSM
k
ˆ
U
k
opp
← HOM (BH
k
)
ˆ
U
k
← Equation1
ˆ
U
k
opp
,U
k
own
ˆr
k
opp
← min
ˆ
U
k
opp
(ω
i
)
ω
i
∈ BH
k
ACSM
k
← ACSM
k−1
− α ∗ ∆
U
k
own
(ω
k
), ACSM
k−1
ˆ
U
k
, r
k
own
, ˆr
k
opp
, θ
k
Table 2: Domain information of the experiments.
Origin Domain Domain Size Origin Domain Domain Size
D1 Lunch 3840 D2 Kitchen 15625
D3 House Keeping 384 D4 Fifty Fifty 11
D5 Defensive Charm 36 D6 Planes 27
D7 Outfit 128 D8 Wholesaler 56700
D9 Dog Choosing 270 D10 Animal 1152
D11 Nice or Die 3 D12 Smart Phone 12000
ble 3); thus, the methods were evaluated on negoti-
ations distributed both homogeneously and heteroge-
neously with the training set.
The inputs of training CNN-components utilized
the opponent’s private information for the conver-
gence. The output of training NNSM was the aver-
age agreement utility of the six training opponents on
a scenario. The batch size is set to 200. All train-
ing processes are stopped within 100 steps, although
the maximum number is set to 3000. Each train-
ing repeated five times with early stopping, and the
model with the best validation was used for testing.
The validation loss of the CNN-components of time-
dependent agents are around 0.06, and those of tit-
for-tat agents are around 0.13. The validation loss of
NNSM are around 0.11.
6.3 Results
The experimental results of strategy selecting mech-
anisms applying initial ACSM and NNSM are dis-
cussed in Section 6.3.1., comparing CNN-extracted
features with expert features. A strategy-selecting
mechanism is denoted as the surrogate model applied,
i.e., ACSM or NNSM, simplifying the notation. Sec-
tion 6.3.2. presents the differences between applying
ACSM with and without fine-tuning against different
opponent agents.
6.3.1 ACSM and NNSM
The results are demonstrated from two perspectives.
One is the performance against each opponent over
all the scenarios, showing the influence of the oppo-
nent agent; another is the performance in each domain
against all the opponents, showing the influence of
scenario size.
Table 5 shows the results against each opponent.
Out of the ten opponent agents, ACSM performed
not worse in seven in terms of the agreement util-
ity, ACSM performed not worse in eight in terms of
the social welfare, and ACSM performed not worse in
nine in terms of the agreement rate. The differences
between ACSM and NNSM regarding the agreement
utility were marginal. One possible reason is that
the experiments were to select the strategy parame-
ter for a time-dependent agent, where stubborn strate-
gies were easier to get higher agreement utilities in
most cases; hence, both surrogate models learned to
select the most stubborn strategy (i.e., e = 5) for most
scenarios, resulting in the differences being marginal.
Notably, ACSM outperformed NNSM regarding so-
cial welfare and agreement rate noticeably, although
it was not trained for them. We found that ACSM
will flex to less stubborn but more reasonable strate-
gies when the scenario is not promising, probably by
considering more scenario details, contributing to the
higher agreement ratios under similar agreement util-
ities, thus promoting higher social welfare. Simulta-
neously, NNSM lost more details when selecting the
strategy, resulting in a lower agreement ratio and so-
cial welfare.
According to all three performance metrics, the
only one of the ten opponent agents that NNSM dom-
inated ACSM was the time-dependent agent (e=1). Its
agreement utility value in a scenario was close to all
A Fine-Tuning Aggregation Convolutional Neural Network Surrogate Model of Strategy Selecting Mechanism for Repeated-Encounter
Bilateral Automated Negotiation
283
Table 3: Opponent agents used in this experiment.
Type Agent Name Year of ANAC/Strategy
Testing
AgentK 2010
Hardheaded 2011
Atlas3 2015
AgentGG 2019
Training
and
testing
Time dependent e = 0.1
Time dependent e = 1.0
Time dependent e = 5.0
Tit-For-Tat δ = 1
Tit-For-Tat δ = 2
Tit-For-Tat δ = 3
Table 4: Features used in features-based neural network surrogate model. U denotes own utility function.
Type Description Equation Notation
Domain
Number of issues |I |
Average number of values |
1
|
I
|
∑
I∈I
|V
I
|
Number of outcomes |Ω|
Preference
Standard deviation of weights
r
1
|
I
|
∑
I∈I
w
I
−
1
|
I
|
2
Average utility of Ω
1
|
Ω
|
∑
ω∈Ω
U(ω)
¯
U
Standard deviation utility of Ω
q
1
|
Ω
|
∑
ω∈Ω
(U(ω) −
¯
U)
2
Reservation
value
Reservation value r
Percent of Ω above r
1
|
Ω
|
|Ω
r
|, U(Ω
r
) > r
Average utility of Ω
r
1
|Ω
r
|
∑
ω∈|Ω
r
|
U(ω)
¯
U
r
Standard deviation utility of Ω
r
q
1
|Ω
r
|
∑
ω∈Ω
r
(U(ω) −
¯
U
r
)
2
Opponent
The utility of
the first bid from the opponent
U(ω
f irst
)
training agents’ average agreement utility value, re-
sulting that NNSM performs like predicting the agree-
ment utility of the time-dependent agent (e=1), which
could be one reason that NNSM dominated regarding
the time-dependent agent (e=1). In contrast, when se-
lecting a strategy with ACSM, a strategy is evaluated
by all CNN-components; thus, the CNN-component
that evaluates strategies in a more radical way, i.e.,
leaves more apparent gaps between the evaluation val-
ues assigned to strategies, would have a more sig-
nificant impact on the final selection; consequently,
a strategy would not be preferred even if only one
CNN-component assigns it an evaluation value no-
ticeably lower than the other strategies.
Table 6 classifies the results by domain, showing
the performance with a different number of outcomes.
Out of the 12 domains, ACSM performs not worse
in nine in terms of the agreement utility, ACSM per-
forms not worse in ten in terms of the social welfare,
and ACSM performs not worse in ten in terms of the
agreement rate. Notably, ACSM performed better in
the cases when the number of outcomes was greater
than 100, i.e., D1-3, D7-10, and D12, demonstrating
that ACSM could understand the negotiation settings
rich in information better than NNSM. In contrast, in
domains D4-6 and D11 with less than 50 outcomes,
ACSM performed the same with or slightly worse
than NNSM. One reason could be that the outcome-
utilities matrices of those domains are too sparse for
CNN to extract useful information.
To summarize, the hypotheses that ACSM out-
performs NNSM in terms of agreement utility by
0.027%, in terms of social welfare by 0.253%, and
in terms of agreement ratio by 0.335% are confident
at α = 0.1 according to the Mann-Whitney U test
(p = 0.095). These results indicate that a strategy
selection mechanism using ACSM is able to select
more advantageous strategies than one using NNSM
by making more accurate evaluations.
6.3.2 F-ACSM and ACSM
This section presents the experimental results of per-
forming strategy selecting mechanisms using ACSM
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
284
1x3
1x50
1x25
1x10
Output:
1x1
Input
Conv2D
5x5
Conv2D
2x2
strides=2
Conv2D
5x5
Conv2D
5x5,
strides=2
Conv2D
5x5
strides=2
Conv2D
2x2
strides=2
Conv2D
2x2
strides=2
flatten
concatenate
a
b
Dense Dense Dense Dense DenseDense Dense Dense Dense Dense Dense
Input: 11
22
44
88
176
352
176
88
44
22
11
Output: 1
Figure 5: The schematic diagram of CNN-component (a) and NNSM (b).
Table 5: Results of ACSM and NNSM regarding each opponent. Hard denotes the HardHeaded agent. T4T denotes the tit-
for-tat agent, Time denotes the time dependent agent, and the number below them means the strategy parameter. AU denotes
average agreement utility; SW denotes social welfare; AR denotes agreement rate; AC denotes ACSM; NN denotes NNSM.
Hard AgentK AgentGG Atlas3
T4T
1
T4T
2
T4T
3
Time
0.1
Time
1
Time
5
AU
AC 0.684 0.754 0.746 0.844 0.799 0.808 0.810 0.896 0.831 0.799
NN 0.684 0.754 0.737 0.845 0.798 0.809 0.810 0.894 0.834 0.794
SW
AC 1.558 1.607 1.546 1.646 1.527 1.518 1.508 1.473 1.492 1.610
NN 1.554 1.602 1.526 1.646 1.525 1.516 1.503 1.468 1.494 1.606
AR
AC 0.709 0.796 0.753 0.915 0.773 0.778 0.767 0.828 0.750 0.863
NN 0.706 0.792 0.738 0.910 0.772 0.775 0.760 0.827 0.757 0.852
with fine-tuning (F-ACSM) and one without fine-
tuning (ACSM) on RBAN sessions. The results re-
garding each opponent agent are demonstrated, show-
ing the performances of fine-tuning against different
opponent agents. Only agreement utility is used as
the performance metric, considering fine-tuning tar-
gets achieving a higher agreement utility.
Table 7 presents the results of the ACSM and F-
ACSM methods against various opponent agents. Ac-
cording to the Wilcoxon signed ranks test with a con-
fidence level of α = 0.05, the results that are bolded in
each column are statistically significantly greater than
the other. Our analysis shows that F-ACSM consis-
tently outperforms ACSM across a range of opponent
agents, both for the training and testing cases. This
indicates that the fine-tuning method is effective at al-
lowing ACSM to adapt to the opponent agent being
faced in the current scenario, even it that is not used
in the training of the CNN components. In most cases,
the differences between F-ACSM and ACSM are no-
table, with only two exceptions: the Hardheaded and
Tit-for-Tat (δ = 3) opponent agents. One potential
reason for this is that the Hardheaded agent is par-
ticularly stubborn, making it difficult to improve the
agreement utility through adjustments to the time-
dependent strategy. Another possible reason is that
the Tit-for-Tat (δ = 3) agent is complex and highly de-
pendent on the scenario, which may make it difficult
to learn through fine-tuning, even though its CNN-
component has a relatively lower validation accuracy
A Fine-Tuning Aggregation Convolutional Neural Network Surrogate Model of Strategy Selecting Mechanism for Repeated-Encounter
Bilateral Automated Negotiation
285
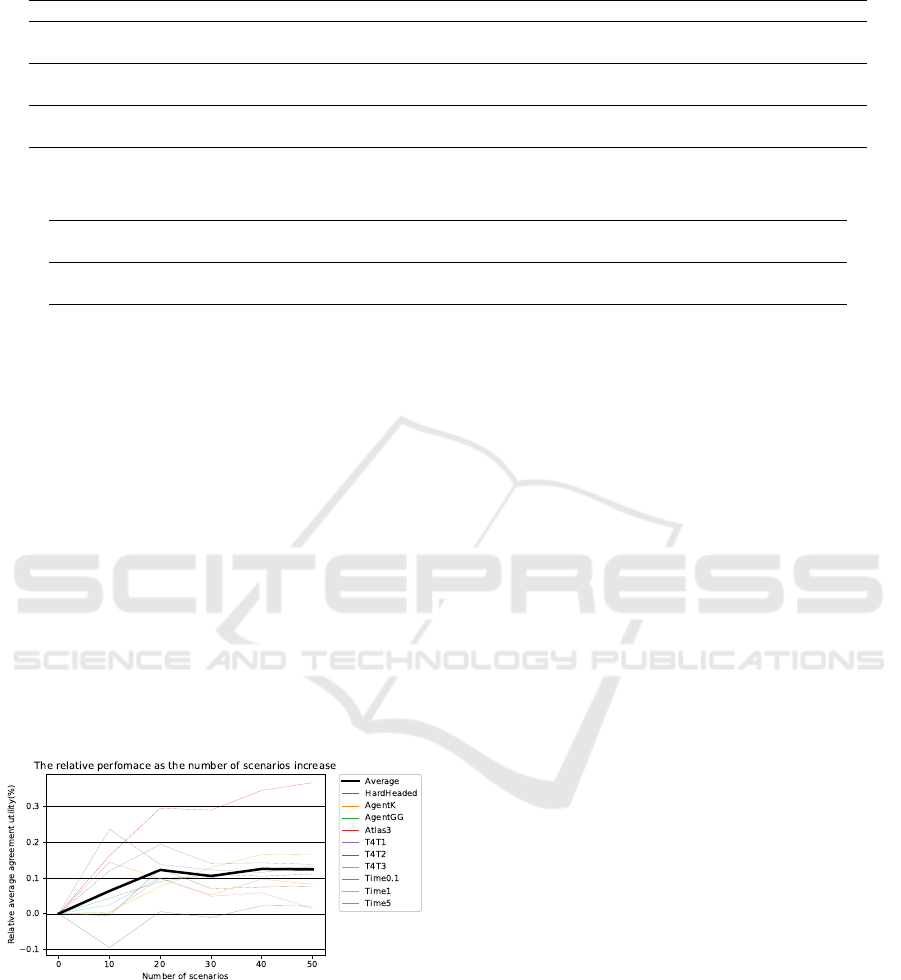
Table 6: Results of ACSM and NNSM in different domains. D1-12 refer to the domain in Table 2, respectively.
D1 D2 D3 D4 D5 D6 D7 D8 D9 D10 D11 D12
AU
AC 0.765 0.847 0.806 0.805 0.784 0.746 0.773 0.832 0.817 0.798 0.781 0.812
NN 0.763 0.844 0.800 0.805 0.792 0.748 0.769 0.830 0.816 0.797 0.782 0.808
SW
AC 1.480 1.621 1.570 1.545 1.564 1.478 1.556 1.582 1.564 1.529 1.534 1.560
NN 1.478 1.612 1.561 1.543 1.562 1.482 1.539 1.576 1.558 1.525 1.534 1.561
AR
AC 0.739 0.822 0.808 0.842 0.815 0.706 0.732 0.830 0.817 0.792 0.836 0.782
NN 0.743 0.812 0.800 0.838 0.809 0.712 0.722 0.824 0.813 0.788 0.836 0.770
Table 7: Average agreement utility of F-ACSM and ACSM with each opponent in the 60 RBAN sessions each including 50
scenarios. F-AC and AC denote F-ACSM and ACSM respectively.
Hard AgentK AgentGG Atlas3
T4T
1
T4T
2
T4T
3
Time
0.1
Time
1
Time
5
F-AC 0.6887 0.7564 0.7464 0.8472 0.8058 0.8114 0.8108 0.8953 0.8366 0.8018
AC 0.6885 0.7558 0.7455 0.8441 0.8048 0.8108 0.8107 0.8941 0.8353 0.8007
(0.17 compared to the average of 0.10).
Figure 6 demonstrates the changing of agreement
utility as the number of scenarios increases, show-
ing that F-ACSM performed better in most cases
and on average. Especially, F-ACSM learned the
testing-only ANAC agents not slower than the essen-
tial agents. We noticed some curves would go down,
especially after 20 scenarios. One reason could be
that, at first, the surrogate model could be success-
fully tuned easier when it is far from the truth (the
optimal parameter configuration); meanwhile, after
tuning, the misleading could cause more deterioration
when it is near the truth. Another could be that using
the estimated opponent’s preference profile as inputs
for fine-tuning can mislead the tuning sometimes, also
describing when against the Hardheaded agent why
F-ACSM deteriorated at first and recovered rapidly.
Figure 6: Relative performance between F-ACNM and
ACNM with different opponents as the number of scenarios
increases. The value is the average for every ten negotiation
scenarios over the 60 sessions. The bold line presents the
average value of all opponents. T4T denotes the tit-for-tat
agent; Time stands for the time dependent Agent, the value
after denotes the strategy parameter.
To summarize, F-ACSM achieved an average im-
provement of 0.13% over ACSM when tested against
the 10 opponent agents. This result is statistically sig-
nificant at the α = 0.05 level according to a Mann-
Whitney U test. It is expected that F-ACSM would
only show slight improvements over ACSM when
only selecting a concession speeds parameter for a ba-
sic time-dependent agent. Additionally, the changing
of relative performance as the number of scenarios in-
creases shows that fine-tuning could adapt ACSM to
the opponent gradually in RBAN, although the pro-
cess may be a tortuous ascent.
7 CONCLUSION AND FUTURE
WORK
This paper presented an ACSM and fine-tuning ap-
proach for a strategy selecting mechanism applied to
RBAN. The ACSM was characterized by using CNN
to intelligently extract negotiation scenario features
and aggregating different CNNs to ensure the diver-
sity of extracted features. The fine-tuning approach
was applied to adjust the weights of CNNs of the
ACSM after each negotiation to adapt the ACSM to
the facing opponent. The ACSM was higher than the
NNSM in agreement utility, social welfare, and agree-
ment ratio in the experimental results of single negoti-
ations with selecting a parameter for a time-dependent
agent. This indicated that the CNN-feature-based
surrogate model is more promising than the existing
expert-feature-based surrogate model. The F-ACSM
was higher than the ACSM in agreement utility in the
experimental results of RBAN, showing that the fine-
tuning method is beneficial for adapting ACSM to the
opponent.
In future studies, we will consider overcoming the
negative effect of over-fitting (i.e., the deterioration
caused by fine-tuning, especially in the late RBAN.).
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
286

Designing some early-stopping or dynamic learning
rate rules for fine-tuning would be beneficial; how-
ever, the scenario uncertainties make it difficult to
calculate the opponent model’s current accuracy and
weigh up its performance after tuning.
ACKNOWLEDGEMENT
This study was supported by JSPS KAKENHI Grant
Numbers 22H03641, 19H04216 and JST FOREST
(Fusion Oriented REsearch for disruptive Science and
Technology) Grant Number JPMJFR216S.
REFERENCES
Aydogan, R., Baarslag, T., Fujita, K., and Jonker, C.
(2022). 13th Automated Negotiating Agents Com-
petition (ANAC2022). https://web.tuat.ac.jp/ kat-
fuji/ANAC2022/genius.html.
Aydo
˘
gan, R., Baarslag, T., Fujita, K., Mell, J., Gratch, J.,
de Jonge, D., Mohammad, Y., Nakadai, S., Morinaga,
S., Osawa, H., Aranha, C., and Jonker, C. M. (2020).
Challenges and main results of the automated nego-
tiating agents competition (ANAC) 2019. In Bassil-
iades, N., Chalkiadakis, G., and de Jonge, D., edi-
tors, Multi-Agent Systems and Agreement Technolo-
gies, pages 366–381, Cham. Springer International
Publishing.
Baarslag, T., Fujita, K., Gerding, E. H., Hindriks, K., Ito,
T., Jennings, N. R., Jonker, C., Kraus, S., Lin, R.,
Robu, V., and Williams, C. R. (2013). Evaluating
practical negotiating agents: Results and analysis of
the 2011 international competition. Artificial Intelli-
gence, 198:73–103.
Baarslag, T., Hindriks, K., Jonker, C., Kraus, S., and Lin, R.
(2012). The first automated negotiating agents com-
petition (ANAC2010). In Ito, T., Zhang, M., Robu,
V., Fatima, S., and Matsuo, T., editors, New Trends in
Agent-Based Complex Automated Negotiations, pages
113–135. Springer Berlin Heidelberg, Berlin, Heidel-
berg.
Chkoniya, V. and Mateus, A. (2019). Digital category man-
agement: How technology can enable the supplier-
retailer relationship. In Smart Marketing With the In-
ternet of Things, pages 139–163. IGI Global.
Faratin, P., Sierra, C., and Jennings, N. R. (1998). Ne-
gotiation decision functions for autonomous agents.
Robotics and Autonomous Systems, 24(3):159–182.
Fujita, K. (2014). Automated strategy adaptation for multi-
times bilateral closed negotiations. In Proceedings
of the 2014 International Conference on Autonomous
Agents and Multi-Agent Systems, AAMAS’14, page
1509–1510, Richland, SC. International Foundation
for Autonomous Agents and Multiagent Systems.
Fujita, K. (2018). Compromising adjustment strategy based
on tki conflict mode for multi-times bilateral closed
negotiations. Computational Intelligence, 34(1):85–
103.
Fujita, K., Ito, T., Baarslag, T., Hindriks, K., Jonker, C.,
Kraus, S., and Lin, R. (2013). The second automated
negotiating agents competition (ANAC2011). In Ito,
T., Zhang, M., Robu, V., and Matsuo, T., editors,
Complex Automated Negotiations: Theories, Models,
and Software Competitions, pages 183–197. Springer
Berlin Heidelberg, Berlin, Heidelberg.
G
¨
unes¸, T. D., Arditi, E., and Aydo
˘
gan, R. (2017). Collective
voice of experts in multilateral negotiation. In An, B.,
Bazzan, A., Leite, J., Villata, S., and van der Torre,
L., editors, PRIMA 2017: Principles and Practice of
Multi-Agent Systems, pages 450–458, Cham. Springer
International Publishing.
Ilany, L. and Gal, Y. (2016). Algorithm selection in bilat-
eral negotiation. Autonomous Agents and Multi-Agent
Systems, 30(4):697–723.
Kawata, R. and Fujita, K. (2020). Meta-strategy based on
multi-armed bandit approach for multi-time negotia-
tion. IEICE Transactions on Information and Systems,
E103.D(12):2540–2548.
Mohammad, Y., Nakadai, S., and Greenwald, A. (2020).
Negmas: A platform for automated negotiations. In
PRIMA 2020: Principles and Practice of Multi-Agent
Systems: 23rd International Conference, Nagoya,
Japan, November 18–20, 2020, Proceedings, page
343–351, Berlin, Heidelberg. Springer-Verlag.
Mori, A. and Ito, T. (2017). Atlas3: A negotiating agent
based on expecting lower limit of concession func-
tion. In Fujita, K., Bai, Q., Ito, T., Zhang, M., Ren,
F., Aydo
˘
gan, R., and Hadfi, R., editors, Modern Ap-
proaches to Agent-based Complex Automated Negoti-
ation, pages 169–173. Springer International Publish-
ing, Cham.
Renting, B. M., Hoos, H. H., and Jonker, C. M. (2020).
Automated configuration of negotiation strategies. In
Proceedings of the 19th International Conference on
Autonomous Agents and MultiAgent Systems, AA-
MAS’20, page 1116–1124, Richland, SC. Interna-
tional Foundation for Autonomous Agents and Mul-
tiagent Systems.
Renting, B. M., Hoos, H. H., and Jonker, C. M. (2022).
Automated configuration and usage of strategy port-
folios for mixed-motive bargaining. In Proceedings
of the 21st International Conference on Autonomous
Agents and Multiagent Systems, AAMAS’22, page
1101–1109, Richland, SC. International Foundation
for Autonomous Agents and Multiagent Systems.
Rosenschein, J. S. and Zlotkin, G. (1994). Rules of En-
counter: Designing Conventions for Automated Ne-
gotiation among Computers. MIT Press, Cambridge,
MA, USA.
Sengupta, A., Mohammad, Y., and Nakadai, S. (2021).
An autonomous negotiating agent framework with re-
inforcement learning based strategies and adaptive
strategy switching mechanism. In Proceedings of
the 20th International Conference on Autonomous
Agents and MultiAgent Systems, AAMAS’21, page
1163–1172, Richland, SC. International Foundation
for Autonomous Agents and Multiagent Systems.
A Fine-Tuning Aggregation Convolutional Neural Network Surrogate Model of Strategy Selecting Mechanism for Repeated-Encounter
Bilateral Automated Negotiation
287

Taiji, M. and Ikegami, T. (1999). Dynamics of internal mod-
els in game players. Physica D: Nonlinear Phenom-
ena, 134(2):253–266.
Van Krimpen, T., Looije, D., and Hajizadeh, S. (2013).
Hardheaded. In Ito, T., Zhang, M., Robu, V., and Mat-
suo, T., editors, Complex Automated Negotiations:
Theories, Models, and Software Competitions, pages
223–227. Springer Berlin Heidelberg, Berlin, Heidel-
berg.
Wu, L., Chen, S., Gao, X., Zheng, Y., and Hao, J. (2021).
Detecting and learning against unknown opponents
for automated negotiations. In Pham, D. N., Theer-
amunkong, T., Governatori, G., and Liu, F., editors,
PRICAI 2021: Trends in Artificial Intelligence, pages
17–31, Cham. Springer International Publishing.
Ya’akov Gal, K. and Ilany, L. (2015). The fourth auto-
mated negotiation competition. In Fujita, K., Ito, T.,
Zhang, M., and Robu, V., editors, Next Frontier in
Agent-Based Complex Automated Negotiation, pages
129–136. Springer Japan, Tokyo.
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
288
