
Fast Heuristic for Ricochet Robots
Jan H
˚
ula
1,2 a
, David Adamczyk
1 b
and Mikol
´
a
ˇ
s Janota
2 c
1
Institute for Research and Applications of Fuzzy Modeling, University of Ostrava,
Ostrava, 701 03, Czech Republic
2
Czech Technical University in Prague, Prague, Czech Republic
Keywords:
Multi-Agent Pathfinding, Heuristic Algorithms, Ricochet Robots, Subgoals.
Abstract:
In this contribution, we describe a fast heuristic for a logical game called Ricochet Robots in which multiple
robots cooperate in order to reach a goal. The heuristic recursively explores a restricted search space using
subgoals that correspond to interactions of two robots. Subgoals are expanded according to an estimated length
of a complete solution, which makes the algorithm reminiscent of the A* algorithm. The estimated length is
a lower bound of the length of the real solution, and this allows us to prune subgoals using the best solution
found thus far. After eliminating all remaining subgoals, we are guaranteed that the best solution found is the
shortest solution from the restricted search space. Moreover, we show that the restricted search space contains
a large portion of optimal solutions of the empirical distribution of 1 million random problems. We believe that
the presented ideas should generalize to other search problems in which multiple independent agents could
block or help each other.
1 INTRODUCTION
This contribution presents a fast heuristic (Edelkamp
and Schrodl, 2011; Pearl, 1984) for a logical game
called Ricochet Robots. In this game, the player con-
trols independent robots placed on a grid with obsta-
cles and tries to get one particular robot to the desired
goal position, ideally in the least amount of steps. The
heuristic is based on several novel ideas which should
generalize to other search problems in which multi-
ple independent agents could block or help each other.
The main idea stems from the fact that empirically the
distribution of randomly generated problems induces
optimal solutions with a property that we can exploit
to restrict the search space.
Our approach works by enumerating all possible
solutions with this property. The search can be viewed
as a version of the A* algorithm (Hart et al., 1968)
that searches over the state space of possible meeting
points of pairs of robots. Two types of relaxations for
the length of a path are used to effectively prune the
search space.
The text of this contribution is structured as fol-
lows: In Section 2 we describe the problem, in Sec-
a
https://orcid.org/0000-0001-7639-864X
b
https://orcid.org/0000-0002-7794-104X
c
https://orcid.org/0000-0003-3487-784X
tion 3 we present an empirical distribution of optimal
solution types which serves as a motivation for our
approach, in Section 4, the search algorithm is de-
scribed, Section 5 contains experimental results, Sec-
tion 6 contains related work which is followed by dis-
cussion and conclusion in Sections 7 and 8, respec-
tively.
2 PROBLEM DESCRIPTION
Ricochet Robots is a puzzle board game designed by
A. Randolph. The player controls multiple movable
pieces (robots) placed on a square grid with several
obstacles (walls) between two adjacent tiles. The
robots are allowed to move only in vertical or hori-
zontal directions and once they start moving, they can
stop only when blocked by a wall or another robot.
The goal is to cover target tiles with robots of the cor-
responding color with the least number of moves. In
our case, we will focus on games with only one target
tile.
Each step of a game consists of selecting a robot
and a direction. Before executing the next move, the
previous move needs to be fully executed. To reach
the target tile, the corresponding robot may need the
assistance of other robots to stop at tiles from which
H˚ula, J., Adamczyk, D. and Janota, M.
Fast Heuristic for Ricochet Robots.
DOI: 10.5220/0011699900003393
In Proceedings of the 15th International Conference on Agents and Artificial Intelligence (ICAART 2023) - Volume 1, pages 71-79
ISBN: 978-989-758-623-1; ISSN: 2184-433X
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
71

it can get to the target tile. The helper robots may
also need assistance from other robots, and this makes
the reachability problem interesting. The game with
k robots and one target tile was proven to be NP-
Complete by Engels et al. (Engels and Kamphans,
2006). For completeness, we provide a formal def-
inition of the game adapted from Masseport et al.
(Masseport et al., 2019):
Definition 1. Ricochet Robots is a class of 1-player
games parametrized by the size of a grid and the num-
ber of robots. The board state of this game with grid
size n × n and k robots consists of:
1. A square grid of size n × n
2. A set R = {r
1
,...,r
k
} of k robots where r
i
= (x
i
,y
i
)
with 1 ≤ x
i
,x
j
≤ n. The robot r
1
is designated to
be the target robot.
3. A target tile g = (x
g
,y
g
)
4. A set O = {{(o
i
,o
j
),(o
i
0
,o
j
0
)} : |o
i
− o
i
0
| + |o
j
−
o
j
0
| = 1} of obstacles with 1 ≤ o
i
,o
j
,o
i
0
,o
j
0
≤ n
A game state is valid if ∀i(¬∃ j((i 6= j) ∧ (r
i
=
r
j
))). In plain language, two robots cannot be in the
same position at the same time. The goal of the game
is to reach a state where r
1
= g. Possibly, we may
rank solutions by the number of moves they contain.
The rules of the game could be described
as follows: At each move, the player se-
lects a robot r
i
= (x
i
,y
i
) and a direction d ∈
{(0,1),(0,−1),(1,0),(−1,0)}. The board state is
updated by deleting the robot at position (x
i
,y
i
) and
adding it at position (x
i
,y
i
) + dt, where t is the small-
est value such that (x
i
,y
i
) + dt + d ∈ R or {(x
i
,y
i
) +
dt,(x
i
,y
i
) + dt + d} ∈ O. In plain language, the robot
moves in the chosen direction until it is blocked by
another robot or by an obstacle.
In order to make the problem easily visually un-
derstood, the individual robots are colored and the tar-
get tile has the same color as the target robot.
3 EMPIRICAL DISTRIBUTION
OF SOLUTION TYPES
The heuristic we use to find the solution can be justi-
fied by the fact that, empirically, the optimal solutions
(with the least number of moves) tend to have the
property which we call Simple Reverse Dependency
(SRD). Concretely, this property holds for ∼ 94% of
1 million randomly generated instances. In this sec-
tion, we describe how we computed this number.
Generating Data for the Analysis. First, we gener-
ated 1 million random instances as described in Sec-
tion 5.1. In this case, we generated instances of size
16 × 16. For each instance, we find the shortest so-
lution with a publicly available solver designed and
optimized for Ricochet Robots
1
with a runtime of 60
seconds. Given an optimal solution, we need to ex-
plain every move in it. The purpose of every move
can be to avoid or help another robot, with the excep-
tion that the target robot can also move to reach the
target tile. There could also be moves whose purpose
is to avoid some robot and help another robot at the
same time. We count the moves as helping moves.
To label each move, we iterate over all the moves
of a given robot until a state in which this robot is
helping another robot (the other robot is blocked by
it). If there is such a state, we label all the pre-
vious moves as helping moves, and the subsequent
moves as still unexplained. If there is no such state,
we label all the moves either as avoidance moves or
target-reaching moves, depending on whether they are
done by a helper robot or a target robot, respectively.
We follow this procedure until all the moves of every
robot are explained.
Solution Dependency Graph. Next, we construct
a Solution Dependency Graph. This is a multigraph
(parallel edges are allowed) where the nodes corre-
spond to individual robots and the edges correspond
to sequences of moves. The edges are labeled by the
purpose of the moves. For example, if there is a se-
quence of moves of a green robot whose purpose is
to stop the red robot on a given tile, there will be an
edge from the node of the green robot to the node of
the red robot labeled by the type of interaction help. If
the green robot is avoiding the red robot, there would
be the same edge labeled by type of interaction avoid-
ance.
In order to define and detect the SRD property, we
also need to assign an index to the incoming edges of
the interaction type help. This index reflects the tem-
poral order of helping interactions. This means that if
two robots are helping another robot, we will be able
to read out of the graph which helping interaction was
realized first
2
. The indexing is done independently for
each node (i.e. for every set of edges incoming to that
node of interaction type help).
Representing the optimal solution as such a graph
enables us to count how many times a solution of each
type occurs in the sample of the million random in-
stances. In Figure 1, we show the five types of the
most frequent solutions together with a percentage of
solutions covered by each solution type. We can also
1
https://github.com/fogleman/Ricochet
2
The helping interaction is realized once the helped
robot stops by being blocked by the helping robot.
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
72

T
T
H
~33% ~7% ~6% ~4%~35%
help 1
T
HH
help 1 help 2
T
H
avoid
T
H
H
help 1
help 1
Figure 1: Five most frequent solution types. Nodes with T represent target robots, nodes with H represent helper robots. To-
gether, these types of solutions cover ∼ 85% of 1 million randomly generated solutions. The index of the edges of interaction
type help reflects the temporal order as mentioned in the main text.
count the number of solutions with the SRD property,
which is defined next.
Simple Reverse Dependency Property. We say
that a Solution Dependency Graph has a Simple Re-
verse Dependency property if the following condi-
tions hold:
1. The multigraph is a tree.
2. There is no node in the graph that would have an
incoming and outgoing edge of interaction type
help and where the outgoing edge would have an
index strictly greater than 1.
These conditions specify the property of all solu-
tions, which can be found by our algorithm.
We found that from the sample of 1 million in-
stances, ∼ 94% of the solutions have this property.
This finding justifies the use of our heuristic, which
effectively searches for the shortest solutions with this
property. We call the space of solutions with this
property a restricted search space. We note that if
the actual shortest solution of the game does not have
this property, then there is still a high chance that a
longer solution with this property will exist, and our
method will find it.
4 THE APPROACH
4.1 High-Level Overview
On a high level, our algorithm recursively searches
over subgoals between the current and the goal state.
At each level of the recursion, the expanded sub-
goal becomes a current goal, and new subgoals are
proposed. These could be expanded further until a
feasible solution is found. The subgoals are being
expanded according to their optimistically estimated
cost, which serves as a lower bound of the real cost
(length of the final solution). This makes the algo-
rithm reminiscent of the A
?
search, but here we search
over subgoals instead of the low-level states. If a
feasible solution is found at some point, its real cost
can be used to prune the search space by removing
subgoals whose lower bound is higher than the cost
of this feasible solution. This pruning enables us to
quickly search over all possible subgoals until no un-
explored subgoal remains, and this, in turn, guaran-
tees that we will find the shortest solution of the re-
stricted search space.
In the following sections, we describe the whole
approach in detail. Section 4.2 describes how the sub-
goals are enumerated at each node of the recursion
tree. Section 4.3 describes the estimation of the cost
of the final solution corresponding to a subgoal and fi-
nally, Section 4.4 contains a pseudocode of the search
algorithm.
4.2 Enumeration of all Possible
Subgoals Between the Current and
the Goal State
Starting from the initial state of the game where the
goal is to cover the target tile with the target robot,
our algorithm recursively creates subgoals, which are
states that should be traversed in the final solution.
Each subgoal in the current level of recursion corre-
sponds to a state in which one robot is helping the cur-
rent target robot to stop at a position from which it can
reach the current goal state without any other help. In
order to reach such a state, the helper robot needs to
reach its helping position, and the target robot needs
to reach the position where the helper robot blocks it.
To efficiently enumerate the subgoals, we consider
only such states where either the target robot or the
helper robot can reach their position in the subgoal
state without any further help. For example, if we
know that the helper robot is able to reach its helping
position in the subgoal then the subgoal will be com-
pleted if we figure out how to move the target robot to
its corresponding position in this subgoal.
When we expand the subgoal during the search,
the position of the robot with unknown reachability
status becomes a goal and the whole procedure is
Fast Heuristic for Ricochet Robots
73

repeated. At every node of the recursion tree, the
only robots that can be used as helpers are only the
ones that have still not been used on the path from
the root of the recursion tree to this node. This
means that every robot will be able to help only once.
To quickly obtain possible subgoals for the target or
helper robots, we use the following data structure.
The Graph of Components. Each layout of the
game can be represented as a directed graph where
nodes correspond to tiles and edges to possible tran-
sitions between two tiles. That is, there is a directed
edge between two nodes if the robot can transition
from the source tile to the target tile in one move.
A natural concept in such a graph is a strongly con-
nected component. It consists of a maximal collec-
tion of nodes so that it is possible to reach every node
within the component from every other node within
the component. The graph of the typical grid will
consist of several such components as depicted in Fig-
ure 2.
As visible in this Figure 2 (graph a)), the compo-
nents could be related by reachability, and therefore
we can construct a new graph of components where
there is an edge from component a to component b,
if it is possible to transition from component a to
component b. This graph, which we call reachability
graph, allows us to efficiently query all the compo-
nents reachable from a given tile. We simply check
the components which contain the tile and then return
them together with all their descendants in this graph.
For a tile x, we denote this set of components by ↓(x).
The same can be done to obtain the set ↑ (x) of all
components from which it is possible to reach the tile
x, with the only difference being that we take all an-
cestors. For small grids, these two mappings from
tiles to components can be cached in a dictionary.
If it is possible to reach tile b from tile a without
any help, then ↓ (a)∩ ↑ (b) 6=
/
0. If there is the possi-
bility to reach the tile b from the tile a with exactly
one help from another robot, then the robot that starts
at the tile a will at some point need to transition from
one of the components of ↓ (a) to one of the compo-
nents of ↑(b). This transition will be done by a move
in which the starting tile is still in ↓ (a) but the end
tile is already in ↑ (b). We call the starting tile a pre-
transition tile and the end tile a transition tile. In this
move, the moving robot needs to be blocked by an-
other helping robot that is adjacent to the transition
tile. We call this tile a supporting tile.
Subgoals for the Helper Robots. Therefore, to
enumerate all subgoals that allow the target robot to
reach a tile b from a tile a, we need to find all tiles
that allow the robot to transition from ↓ (a) to ↑ (b).
For that end, we construct another graph, we call tran-
sition graph for the target robot, with the nodes again
corresponding to components and edges correspond-
ing to possible transitions from one component to the
other. In comparison to the first graph, the edges go
in the opposite direction, and we ignore the edges cor-
responding to transitions that are possible without the
assistance of another robot. For the grid in Figure 2,
there would be an edge that goes from the green com-
ponent to the red component but not the edge that goes
in the opposite direction. If there are multiple tiles
that allow for the transition from one component to
the other, we add edges for all of them as visible in
Figure 2 b).
These edges will represent subgoals that could be
satisfied by the helper robots. For example, if there is
an edge going from ↓(a) to ↑(b) and ↓(a)∩ ↑(b) =
/
0,
we know that there is a pretransition tile in one of
the components of ↓(a) reachable from a and we also
know that there is a transition tile in one of the com-
ponents of ↑ (b) from which it is possible to reach b.
Therefore, the only thing we do not know is whether
some helper robot is able to reach the corresponding
supporting tile, and this creates a candidate for a new
subgoal.
Subgoals for the Target Robot. We also need to
take into consideration subgoals for the target robot
for which we know that some helper robot is able to
reach the supporting tile but do not know whether the
target robot is able to reach the pretransition tile. To
enumerate such subgoals for the target robot, we cre-
ate a third graph, we call transition graph for helper
robots, with edges that go from components contain-
ing the supporting tile to components containing the
transition tile. For the grid in Figure 2, we would add
an edge from the blue to the red component because a
robot in the blue component could help a target robot
to get to the red component. The resulting graph is
visible in Figure 2 c).
With each edge, we also store additional informa-
tion to fully specify the subgoal. These include the
positions of the transition, pretransition, and support-
ing tiles. For every transition tile, there are two possi-
ble pairs of the pretransition and supporting tiles be-
cause the moving robot can approach the transition
tile from one of the two directions and the support-
ing tile must be adjacent to the transition tile on the
opposite side as depicted in Figure 3. In the transi-
tion graph for the target robot, we therefore need to
store these two pairs of tiles for every edge or create
two separate edges, which is what we do in our im-
plementation.
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
74
a)
b) c)
green
red
blue
yellow
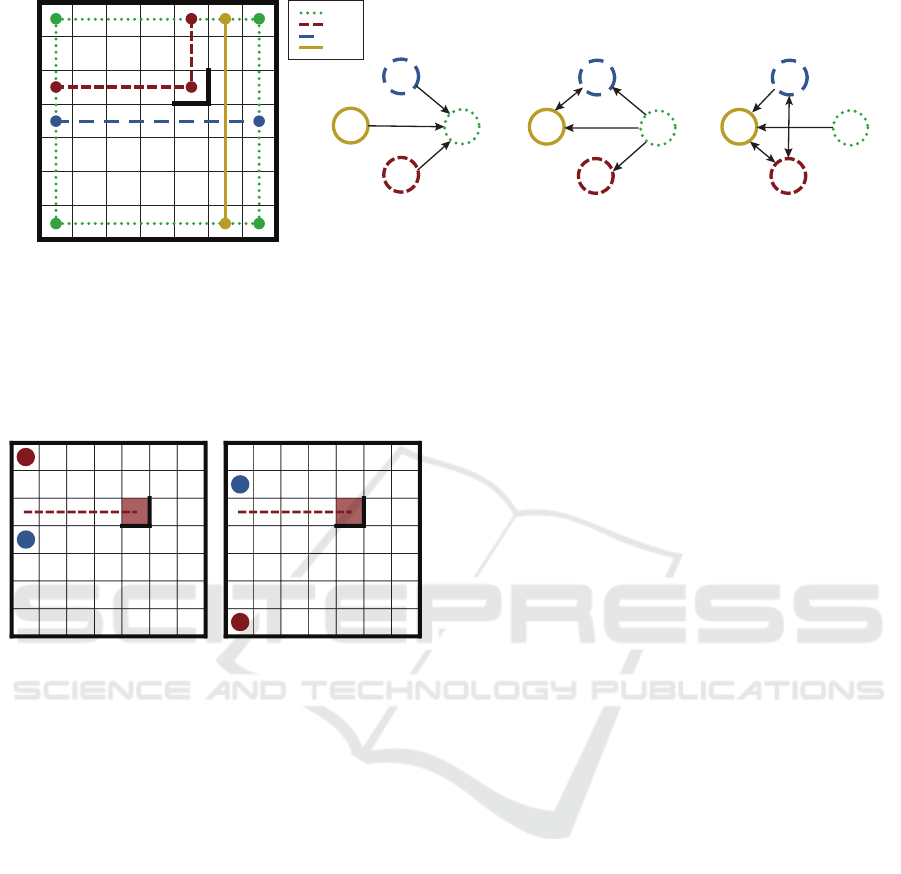
Figure 2: Component and transition graphs. The grid on the left shows four components of the grid with the nodes of
each component highlighted by a dot. Note that there are other components corresponding to vertical and horizontal lines
which are not shown here. The 3 different relations between these components are depicted in the graphs on the right. a) The
graph of connected components shows which components are reachable from a given component without any assistance. b)
The transition graph for the target robot shows which components are reachable from a given component with exactly one
assistance. c) The transition graph for helper robots shows which components could be used in order to assist some robot to
reach the desired component. For example, the arrow from the green to the yellow node reflects the fact that some position in
the green component (i.e., the top-right corner) can be used to assist some other robot to transition to the yellow component.
Figure 3: This figure shows that for the transition tile at po-
sition (3, 1) that enables the red robot to transition to the red
component, there are two pairs of pretransition and support-
ing tiles. This holds in general, for every transition tile there
are two such pairs.
In order to enumerate all helper subgoals which
help the target robot to get from the tile a to the tile b,
we do the following steps:
4.2.1 Obtaining all Subgoals for the Available
Helper Robots
1. obtain ↓(a) and ↑(b) from the reachability graph.
2. get all edges in the transition graph for the target
robot that go from ↓(a) to ↑(b).
3. for each edge and each available robot at the cur-
rent recursion level, create a new subgoal in which
the helper robot needs to reach the supporting tile
stored in the edge.
4. with each new subgoal, store a reference to a par-
ent subgoal together with the transition and pre-
transition tiles so that we can later reconstruct
the path.
In order to enumerate all target subgoals where
the helper robot at tile c helps the current target robot
reach the tile b, we do the following steps:
Obtaining all Subgoals for the Current Target
Robot.
1. obtain ↓ (c) and ↑(b) from the reachability graph.
2. get all the edges in the transition graph for helper
robots that go from ↓(c) to ↑(b).
3. for each edge and the current target robot, create
a new subgoal in which the target robot needs to
reach the pretransition tile stored in the edge.
4. with each new subgoal, store a reference to a par-
ent subgoal together with the transition and sup-
porting tiles so that we can later reconstruct the
path. At the first level of recursion, the parent sub-
goal is the original goal.
These four steps will be executed for all the available
robots at the current recursion level.
4.3 Estimating the Cost of Subgoals
As mentioned in Section 4.1, we may estimate the
cost of each subgoal and then expand the subgoals
from the most promising to the least promising. By
estimating the cost, we mean that we estimate the
length of the full solution of the game which factor-
izes through this subgoal. Each subgoal has a known
and an unknown component. The cost of the subgoal
s has the following form:
f (s) = g(s) +h(s) (1)
where g is the estimated cost of the known component
and h is the estimated cost of the unknown compo-
nent.
Fast Heuristic for Ricochet Robots
75
s.p
d
min
(s.a,s.p)
d
min
(s.c,s.s)
d
min
(s.t,s.b)
s.a
s.t
s.s
s.b
s.c
+
1
~
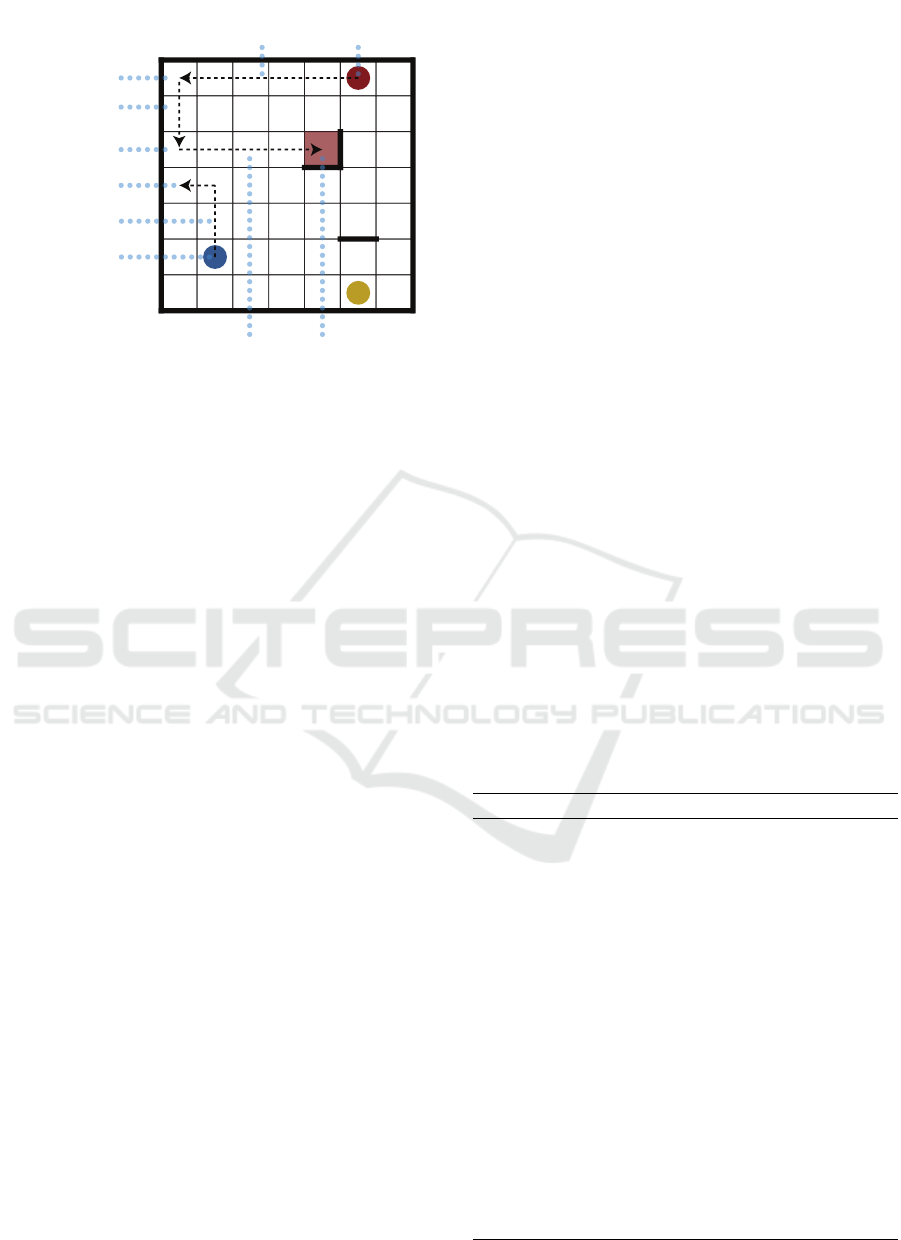
Figure 4: Illustration of individual terms used to compute
the estimate cost f (s) of a subgoal s shown in Equation 1.
To explain how these costs are estimated for both
the target and helper subgoals, we first introduce the
following variables. The value of each variable is
given by the context of the subgoal:
• s.a — the position of the target robot
• s.b — the position of the target tile
• s.c — the position of the helper robot
• s.t — the position of the transition tile
• s.p — the position of the pretransition tile
• s.s — the position of the supporting tile
• s.parent — the reference to the parent subgoal
We also introduce the following distance mea-
sures:
• d
min
(x,y) — the length of the shortest path from
tile x to tile y on a grid with no robots
•
˜
d
min
(x,y) — the length of the shortest path from
tile x to tile y on a grid with no robots and relaxed
rules of the game which allow the robot to stop at
every tile during the move
Both distance measures are relaxations. The first one
ignores the robots that could potentially block the
path and may need to move in order to avoid the mov-
ing robot. The second one is much looser relaxation,
because it will always give a lower value than the first
one. If the tile y is unreachable from the tile x with-
out the help of other robots, the first measure will re-
turn ∞, but the second will return a lower bound of
the cost of the solution using other robots. Both of
these distance measures could easily be precomputed
for each pair of tiles using the Floyd–Warshall algo-
rithm (Floyd, 1962).
The Estimated Cost for the Helper Robot Sub-
goals. In order to estimate the cost f (s) of the sub-
goal of a helper robot, we use the following expres-
sions for g and h:
g(s) = d
min
(s.a,s.p)+d
min
(s.t, s.b)+1+g(s.parrent)
h(s) =
˜
d
min
(s.c,s.s)
The +1 is for the move from the pretransition tile s.p
to the transition tile s.t and g(s.parent) is the cost we
accumulated with the subgoals of the ancestor. The
cost of the unknown component h is given by relax-
ation, which allows the robot to stop at any given tile
during the move. In Figure 4, we highlight the indi-
vidual terms in this cost.
The Estimated Cost for the Target Robot Subgoals.
For the subgoals of the target robot we have:
g(s) = d
min
(s.c,s.s) +d
min
(s.t, s.b) + 1 + g(s.parent)
h(s) =
˜
d
min
(s.a,s.p)
Here, the expressions are similar to the first case, but
we swap the roles of the target and helper robots.
4.4 Obtaining the Shortest Solution of
the Restricted Search Space
After defining the enumeration of subgoals and es-
timation of their cost, we now describe the overall
algorithm which finds the shortest solution of the re-
stricted search space for the given instance. The pseu-
docode is visible in Algorithm 1.
Algorithm 1: Search for the shortest solution.
Input: instance of the game I
Output: shortest solution from the restricted search
space
1: info = preprocess(I)
2: finalGoal = info.goal
3: frontier = PriorityQueue()
4: frontier.put(finalGoal)
5: incumb = None
6: while len(frontier) 6= 0 do
7: current = frontier.get()
8: subgoals = getSubgoals(current,info)
9: subgoals = evaluate(subgoals)
10: incumb = getIncumb(subgoals,incumb,info)
11: frontier.merge(subgoals)
12: frontier = pruneSubgoals(frontier,incumb)
13: end while
14: return incumb
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
76
The whole algorithm resembles A
?
search which
uses a priority queue to always expand the node with
the lowest estimated cost. In our case, the queue pri-
oritizes subgoals according to the estimated cost com-
puted by f from Equation 1.
The function preprocess precomputes the com-
ponent graphs mentioned in Section 4.2, the re-
laxed distance measures mentioned at the end of Sec-
tion 4.3, and extracts the specification of the final
goal. The function getsSubgoals generates the sub-
goals for the target and the helper robots as was de-
scribed in Section 4.2. The function evaluate eval-
uates the subgoals as described in Section 4.3. The
function getIncumb checks if any of the current sub-
goals are reachable without further assistance and re-
turns the solution as a current incumbent if its cost
is lower than the cost of the old incumbent. Other-
wise, it returns the old incumbent. Lastly, the function
pruneSubgoals iterates over all subgoals expanded
so far and removes them if their estimated cost (which
acts as a lower bound) is higher than the cost of the
current incumbent solution. During the search, this
pruning eliminates many potential subgoals and en-
ables us to completely explore the restricted search
space in a short time. Finally, we return the solution
with the least number of moves.
There is one detail that we omitted here. The func-
tion getIncumb needs to internally check if a given
subgoal could be realized without further assistance.
For this, it is necessary that the target robot of this
subgoal is able to reach the target tile of this subgoal.
Nevertheless, this is not sufficient. The solution rep-
resented by the realizable subgoal was constructed by
considering paths on an empty grid (whose length was
estimated by the distance measure d
min
). In the ac-
tual grid, there may be a robot blocking one of these
paths in the solution. In this case, we need to find the
least number of moves to move the blocking robot to
a nonblocking position. We omit the description of
this procedure for the sake of readability.
5 EXPERIMENTS
This section contains experimental results demon-
strating the performance of our algorithm. We first
describe the generation process of random instances
and the baseline used for comparison. Finally, we
provide a table with the results.
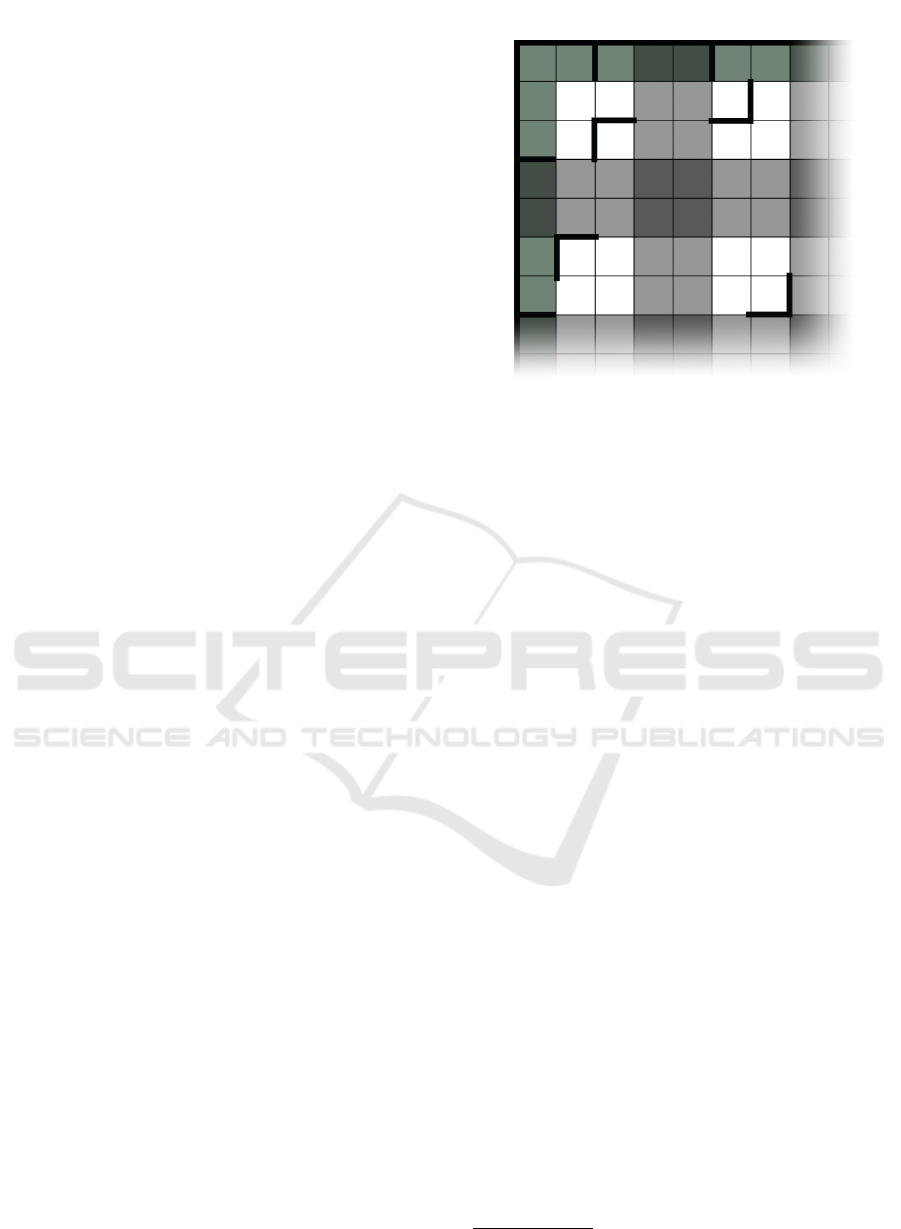
Figure 5: An illustration of the grid generation process. The
grey stripes cannot contain any obstacles. Pair of obstacles
creating a corner can be placed only in the white 2 × 2 “is-
lands”. The rows and columns near the border (green over-
lay) contain only obstacles perpendicular to the border.
5.1 Generating Random Instances of
the Game
In order to test and compare our algorithm, we gener-
ate random instances of the game with varying diffi-
culty. Each instance of the game can contain an arbi-
trary arrangement of obstacles, but the instances ap-
pearing in the publicly available games follow a con-
crete pattern. We follow this pattern in order to avoid
ad-hoc decisions.
Let us assume that the game grid is of size n × n
and let us ignore the first and last rows and columns
of the grid
3
. The resulting sub-grid can be split ver-
tically into stripes each two rows thick and horizon-
tally into stripes each two columns thick. As in the
publicly available instances, these stripes alternate be-
tween blocking and nonblocking stripes. The non-
blocking stripe cannot contain any obstacle and there-
fore the robot can traverse it from one side to the other
without being stopped by an obstacle. The nonblock-
ing stripes of horizontal and vertical direction create
“islands” of 2 × 2 cells that can contain obstacles as
seen in Figure 5. Each of these 2×2 cells can contain
a pair of perpendicular obstacles that meet at a cor-
ner of a cell. There are 8 possibilities to place such
a pair of obstacles in each of the 2 × 2 cells. There-
fore, to generate an instance of a game, we iterate over
all 2 × 2 islands that can contain an obstacle, and for
each, we sample one of these 8 possible placements
with equal probability. The final grid is realized by
3
i.e. we focus on the inner grid with the top-left corner
at the cell (2,2) and the bottom-right corner at the cell (n −
1,n − 1).
Fast Heuristic for Ricochet Robots
77

Table 1: Comparison between A* and our algorithm. As
the instances get harder the gap between the proportion of
solved of A* and our algorithm increases.
Grid Size #Helpers #Instances A* Our
32 × 32 3 10000 90,8 % 94,7 %
96 × 96 3 1000 54 % 87,8 %
96 × 96 5 1000 21,2 % 86 %
uniformly sampling n/4 cells along each border of
the game and placing obstacles perpendicularly to the
given border.
Finally, the instance of a game is completed by
placing all robots on the grid and choosing the tar-
get cell. The positions of the robots are again sam-
pled randomly but the target cell is sampled only from
cells that contain two obstacles meeting at a corner, as
shown in Figure 4.
To test the efficiency of our approach, we gener-
ated instances with three difficulty levels. This diffi-
culty is given by the size of the grid and the number of
helper robots. We tested the following three settings:
• Grid size: 32 × 32, 3 helper robots
• Grid size: 96 × 96, 3 helper robots
• Grid size: 96 × 96, 5 helper robots
5.2 Baseline Algorithm
As a baseline, we use the standard A
?
algorithm. This
means that the search is done on an exponentially
sized directed graph where a node corresponds to a
specific position of all the robots. There is an edge
from node n
1
to n
2
if it is possible to get from the posi-
tion n
1
to the position n
2
in a single move. As a lower
bound heuristic for A
?
we used the relaxation where
the target robot can stop anywhere it likes, without
the aid of other robots—the heuristic is clearly ad-
missible. The heuristic value is precomputed for each
square of the board before search starts. Positions are
kept in a hashset in order to avoid re-exploring nodes.
For the comparison visible in Table 1, we set the
timeout for A
?
to be 900 seconds and for our algo-
rithm to be 30 seconds. In many cases the A
?
al-
gorithm failed because of memory restrictions which
were set to 16 GB. We also mention that the A
?
algo-
rithm was implemented in C++ and our algorithm in
Python.
5.3 Results
As can be seen in Table 1, the gap between the num-
ber of solved instances of the baseline and our algo-
rithm is increasing as the instances get more difficult.
We note, that the A
?
algorithm always finds the op-
timal (shortest) solution whereas our algorithm finds
the optimal solution from the restricted search space.
To quantify how suboptimal are the solutions from
the restricted search space, we compare our solutions
to the solutions of A
?
on the instances with grid size
32 × 32 where A
?
solved many of the instances. On
average our algorithm makes ∼ 1.4 more steps than
the optimal solution.
6 RELATED WORK
The game of Ricochet Robots was already studied
in several publications. Computational complexity
of this game was studied in (Engels and Kamphans,
2006; Masseport et al., 2019; Hesterberg and Kopin-
sky, 2017). (Engels and Kamphans, 2006) proof that
the reachability decision problem is NP-complete for
arbitrary environments. (Masseport et al., 2019) proof
that the optimization problem where the goal is to find
the shortest solution is Poly-APX-hard. (Hesterberg
and Kopinsky, 2017) study the parametrized complex-
ity of this game and show that when fixing the number
of robots, the game becomes W[SAT]-hard. In com-
parison to these works, we do not provide any theoret-
ical insights but show that empirically, the solutions
of typical grids played by humans could be found in a
much more restricted search space.
Several other works study the use of different log-
ical solvers for Ricochet Robots. (Gebser et al., 2013;
Gebser et al., 2015) study the encodings of the game
for ASP solvers. (Gouveia et al., 2017) on the other
hand study encoding for SAT solvers and shows that
SAT solvers are more adequate for Ricochet Robots.
We also tested to encode the problem to SAT but this
approach was not scalable and performed worse than
the A
?
algorithm.
Finally, (Butko et al., 2005) study strategies ap-
plied by humans when playing the game. Our algo-
rithm is partially inspired by human problem solving
which inherently works by proposing subgoals and
trying to reach them.
7 DISCUSSION
Our main motivation for this work was to explore a
search process that factorizes the problem into a se-
quence of subgoals. Such factorization to subgoals
is an inherent part of human problem-solving and we
believe that it holds a great promise for hard sequen-
tial decision-making problems with a combinatorially
large search space. We have explored the idea of sub-
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
78

goals in this toy domain of Ricochet Robots where the
subgoals naturally appear in the form of robot inter-
actions.
There are several ideas in our approach which we
believe could be generalized to other domains. First is
the idea of restricting the explored solution space after
finding a property that holds in the majority of solu-
tions in the empirical distribution of solutions. The
most satisfying solution would of course be to analyt-
ically derive the distribution of this property of solu-
tions from the distribution of some other property of
the problem instances. The second idea is the recur-
sive enumeration of subgoals and the third is the esti-
mation of their cost using a lower bound which can be
used to prune a large portion of the subgoals. The pro-
posal of the subgoals and possibly the estimation of
their cost would be designed in a domain-specific way
or potentially learned by a machine learning compo-
nent (Czechowski et al., 2021; Held et al., 2018). We
leave such generalizations for the future work.
8 CONCLUSION
In this paper, we presented a fast heuristic for the puz-
zle game called Ricochet Robots. It recursively enu-
merates subgoals that correspond to interactions be-
tween robots. Each subgoal is evaluated using an es-
timated solution length which acts as a lower bound
on the real cost of the solution and the algorithm ex-
plores the subgoals in an A
?
fashion. The algorithm
guarantees to find the shortest solution from the re-
stricted solution space which covers a large portion
of solutions from the empirical distribution of 1 mil-
lion randomly generated problems. Our experimental
evaluation shows that our algorithm solves more in-
stances and on average has a much shorter run time
than the baseline used for comparison. Lastly, the
ideas presented in this paper should be generalizable
for other Multi-agent pathfinding problems.
ACKNOWLEDGEMENT
This scientific article is part of the RICAIP project
that has received funding from the European Union’s
Horizon 2020 research and innovation programme
under grant agreement No 857306. The results were
supported by the Ministry of Education, Youth and
Sports within the dedicated program ERC CZ under
the project POSTMAN no. LL1902.
REFERENCES
Butko, N., Lehmann, K. A., and Ramenzoni, V. (2005). Ric-
ochet robots—a case study for human complex prob-
lem solving. Proceedings of the Annual Santa Fe Insti-
tute Summer School on Complex Systems (CSSS’05),
page 95.
Czechowski, K., Odrzyg’o’zd’z, T., Zbysi’nski, M., Za-
walski, M., Olejnik, K., Wu, Y., Kuci’nski, L., and
Milo’s, P. (2021). Subgoal search for complex reason-
ing tasks. In NeurIPS.
Edelkamp, S. and Schrodl, S. (2011). Heuristic search: the-
ory and applications. Elsevier.
Engels, B. and Kamphans, T. (2006). Randolph’s robot
game is np-complete. In Proceedings of the Twenty-
second European Workshop on Computational Geom-
etry (EWCG’06), pages 157–160.
Floyd, R. W. (1962). Algorithm 97: Shortest path. Commu-
nications of the ACM, 5:345.
Gebser, M., Jost, H., Kaminski, R., Obermeier, P., Sabuncu,
O., Schaub, T., and Lindauer, M. T. (2013). Ricochet
robots: A transverse asp benchmark. In LPNMR.
Gebser, M., Kaminski, R., Obermeier, P., and Schaub, T.
(2015). Ricochet robots reloaded: A case-study in
multi-shot asp solving. In Advances in Knowledge
Representation, Logic Programming, and Abstract Ar-
gumentation.
Gouveia, F., Monteiro, P. T., Manquinho, V. M., and Lynce,
I. (2017). Logic-based encodings for ricochet robots.
In EPIA.
Hart, P., Nilsson, N., and Raphael, B. (1968). A formal
basis for the heuristic determination of minimum cost
paths. IEEE Transactions on Systems Science and Cy-
bernetics, 4(2):100–107.
Held, D., Geng, X., Florensa, C., and Abbeel, P. (2018).
Automatic goal generation for reinforcement learning
agents. ArXiv, abs/1705.06366.
Hesterberg, A. and Kopinsky, J. (2017). The parameter-
ized complexity of ricochet robots. J. Inf. Process.,
25:716–723.
Masseport, S., Darties, B., Giroudeau, R., and Lartigau, J.
(2019). Ricochet Robots game: complexity analysis
Technical Report. preprint.
Pearl, J. (1984). Heuristics - intelligent search strategies for
computer problem solving. In Addison-Wesley series
in artificial intelligence.
Fast Heuristic for Ricochet Robots
79
