
Complement Objective Mining Branch for Optimizing Attention Map
Takaaki Iwayoshi
a
, Hiroki Adachi
b
, Tsubasa Hirakawa
c
and Takayoshi Yamashita
d
and Hironobu Fujiyoshi
e
Chubu University, 1200 Matsumoto-cho, Kasugai, Aichi, Japan
Keywords:
Deep Learning,Attention Branch Network,Attention Mining, Attention Mechanism, Visual Explanation.
Abstract:
Attention branch network (ABN) can achieve high accuracy by visualizing the attention area of the network
during inference and utilizing it in the recognition process. However, if the attention area does not highlight
the target object to be recognized, it may cause recognition failure. While there is a method for fine-tuning the
ABN using attention maps modified by human knowledge, it requires a lot of human labor and time because
the attention map needs to be modified manually. The method introducing the attention mining branch (AMB)
to ABN improves the attention area without using human knowledge by learning while considering whether
the attention area is effective for recognition. However, even with AMB, attention regions other than the
target object, i.e., unnecessary attention regions, may remain. In this paper, we investigate the effects of
unwanted attention areas and propose a method to further improve the attention areas of ABN and AMB.
In the evaluation experiments, we show that the proposed method improves the recognition accuracy and
obtains an attention map with more gazed objects. Our evaluation experiments show that the proposed method
improves the recognition accuracy and obtains an attention map that appropriately focuses on the target object
to be recognized.
1 INTRODUCTION
In the field of image recognition, Deep Convolutional
Neural Network (DCNN) (Alex and Hinton, 2012)
has achieved high recognition performance, but it is
difficult for humans to interpret the basis of deci-
sions during recognition due to the complex network
structure of DCNN. Visual explanation is a commonly
used approach to overcome this difficulty.
Class activation mapping (CAM) (Zhou et al.,
2016), gradient-weighted class activation mapping
(Grad-CAM) (Selvaraju et al., 2017), and attention
branch network (ABN) are major visual explanation
methods. These methods can visualize the attention
regions as the attention map during the inference of
DCNN. ABN not only visualizes the attention regions
during the inference but also can boost recognition
performance by leveraging the attention regions dur-
ing training. Specifically, it can capture an effective
region for recognition by multiplying the attention re-
a
https://orcid.org/0000-0003-4421-3270
b
https://orcid.org/0000-0001-5920-2633
c
https://orcid.org/0000-0003-3851-5221
d
https://orcid.org/0000-0003-2631-9856
e
https://orcid.org/0000-0001-7391-4725
gions to feature maps with the attention mechanism.
However, attention maps of ABN focus on not only
a recognition target but also other things or no longer
focus on it. These attention maps, i.e., the attention
maps including an inappropriate region, make train-
ing of ABN difficult, so they may degrade the recog-
nition performance.
For optimizing attention maps, a fine-tuning
method based on human-in-the-loop has been pro-
posed (Mitsuhara et al., 2021). This method manually
edits the attention maps of misclassified images that
focus on the target object or characteristic region for
classification and then fine-tunes the network param-
eters by using the edited attention map. This enables
the network to correctly focus on the same region as
a human would and improves the explainability and
accuracy. However, this method requires the attention
maps to be manually edited, which causes an increase
in human labor and time.
To overcome the shortcomings of Mit-
suhara et al.’s method, attention mining branch
(AMB) (Iwayoshi et al., 2021) reduces attention
regions other than objects to be recognized without
human knowledge. Specifically, we have succeeded
in suppressing the generation of unwanted attention
Iwayoshi, T., Adachi, H., Hirakawa, T., Yamashita, T. and Fujiyoshi, H.
Complement Objective Mining Branch for Optimizing Attention Map.
DOI: 10.5220/0011699000003417
In Proceedings of the 18th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2023) - Volume 4: VISAPP, pages
105-113
ISBN: 978-989-758-634-7; ISSN: 2184-4321
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
105
51.71%
GT
𝑝
𝑥
GT: Loggerhead Shrike
78.46%
Great Grey Shrike
6.48%
GT
𝑝
𝑥
21.72%
Great Grey Shrike
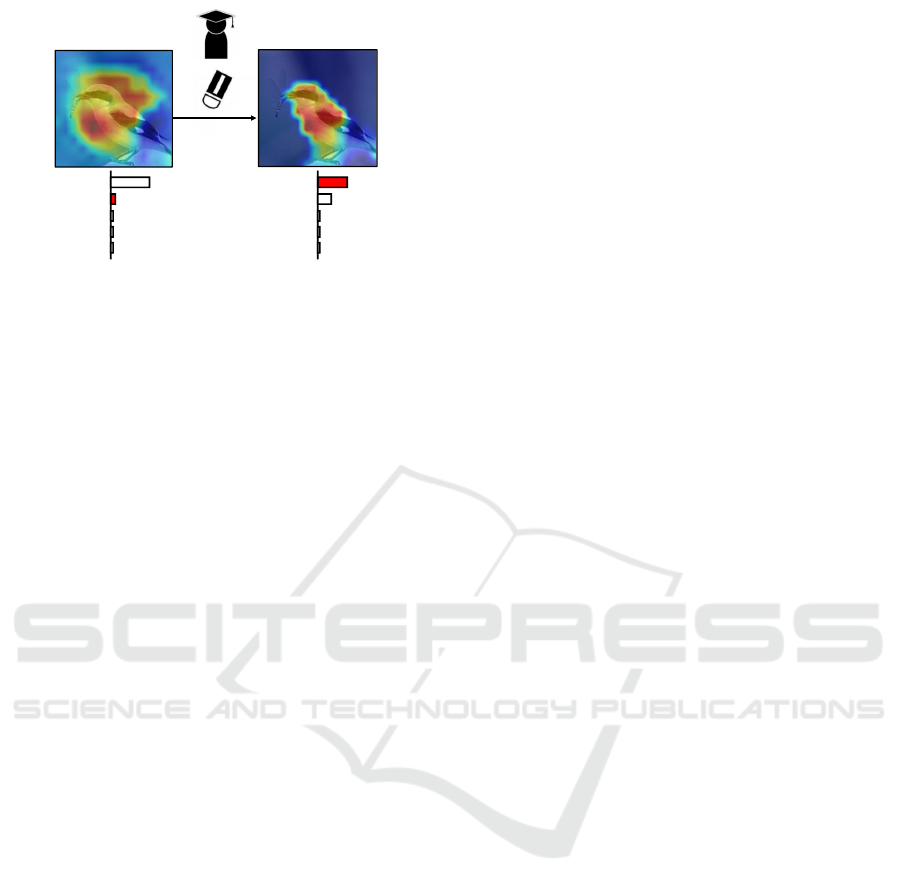
Figure 1: Investigation of the effect of attention areas out-
side the recognition target on inference results. We remove
the attention areas outside the recognition target and inves-
tigate changes in class probability.
regions through learning that considers whether the
attention regions are effective for recognition in
ABN and AMB. However, attention regions other
than the object to be recognized remain, and the
recognition accuracy has not improved as much as
human knowledge. Therefore, in this study, we first
clarify the effect of attention regions other than the
object to be recognized on the inference results. As
shown in Figure 1, we observed that the incorrect
class probability tends to decrease, and the correct
class probability tends to increase when unnecessary
regions are manually removed. Based on the results
of this experiment, we believe it is important to inten-
tionally reduce the incorrect answer class probability
and incorporate such a learning method into ABN
and AMB.
In summary, our work makes the following con-
tributions:
• In the randomly selected examples, we observed
a tendency for the incorrect class probability to
decrease by arbitrarily reducing the unnecessary
attention area.
• In this paper, we propose a method to introduce
Complement Objective Training (COT)(Chen
et al., 2019) to flatten the incorrect class probabil-
ity in ABN and AMB and show that our method
can reduce the unwanted attention area by de-
creasing the incorrect class probability and im-
prove the recognition accuracy accordingly. Our
method is able to reduce the number of unneces-
sary attention regions by decreasing the incorrect
class probability and to improve the recognition
accuracy accordingly.
• We show that the proposed method acquires atten-
tion regions better than human knowledge by us-
ing Insertion, which performs inference only on
regions of high importance for each percentage of
the acquired attention regions.
2 RELATED WORKS
In this section, we introduce Methods for Visual Ex-
planation and a learning method that considers the
incorrect class probability, which is considered to be
one of the causes of unwanted attention areas.
2.1 Visual Explanation
Attention maps enable us to understand the reason for
a network decision. Several methods for obtaining the
attention map have been proposed (Fukui et al., 2019;
Iwayoshi et al., 2021; Zhou et al., 2016; Chattopad-
hay et al., 2018; Chen et al., 2019; Fong et al., 2019;
Fong and Vedaldi, 2017; Selvaraju et al., 2017; Mit-
suhara et al., 2021; Ribeiro et al., 2016; Vitali Petsiuk
and Saenko, 2018; Springenberg et al., 2014; Zhang
et al., 2021), which can be categorized into two ap-
proaches: bottom-up and top-down. The bottom-up
approach computes the attention map by using local
responses of convolution (Smilkov et al., 2017; Bo-
jarski et al., 2016). The top-down approach computes
attention maps derived from class information of the
network output. ABN (Fukui et al., 2019), which is
one of the major top-down visual explanation meth-
ods, generates an attention map by using global aver-
age pooling (Lin et al., 2013) and feature maps, and
then uses the map for the attention mechanism to en-
hance the features of the target object. This atten-
tion mechanism improves the classification accuracy.
Our method utilizes the branch structure and attention
mechanism for optimizing attention maps.
For optimizing attention maps, a fine-tuning
method based on human-in-the-loop has been pro-
posed (Mitsuhara et al., 2021). This method manually
edits the attention maps of misclassified images that
focus on the target object or characteristic region for
classification and then fine-tunes the network param-
eters by using the edited attention map. This enables
the network to correctly focus on the same region as
a human would and improves the explainability and
accuracy. However, this method requires the attention
maps to be manually edited, which causes an increase
in human labor and time. In contrast, our fine-tuning
approach can optimize attention maps without manual
editing.
Moreover, AMB can reduce the attention areas
other than the object to be recognized without us-
ing human knowledge by introducing AMB into ABN
and learning it while considering the effective areas
for recognition. However, the recognition accuracy
is not improved compared with the case where hu-
man knowledge is introduced, because the attention
regions that are not necessary for recognition remain.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
106
Therefore, in this study, we investigate how attention
regions unnecessary for recognition affect class prob-
ability. Then, we propose a method to improve ABN
and AMB.
2.2 Complement Objective Training
COT is a learning method that considers the entropy
of incorrect classes. The weights are updated so
that the correct answer class probability is close to
1. Next, the weights are updated to flatten the prob-
ability of the incorrect answer class. This is done for
each iteration to improve the probability distribution.
From the investigation described below, we know that
the attention regions other than the object to be rec-
ognized affect the probability of the incorrect answer
class. Therefore, we aim to further improve the atten-
tion regions by introducing this method to ABN and
AMB.
3 PROPOSED METHOD
This paper investigates the effect of incorrect answer
class probability on the attention area and proposes
a method to improve ABN and AMB accordingly.
Specifically, this study proposes ABN + COT, which
introduces COT to ABN, and ABN + COMB, which
introduces Complement Objective Mining Branch
(COMB), a combination of AMB and COT, to ABN.
3.1 Influence of Unnecessary Attention
Areas
AMB reduces the attention regions other than the
object to be recognized without human knowledge.
However, attention regions other than the object to be
recognized remain, and the recognition accuracy has
not improved as much as human knowledge. There-
fore, in this study, we first clarify the effect of atten-
tion regions other than the object to be recognized on
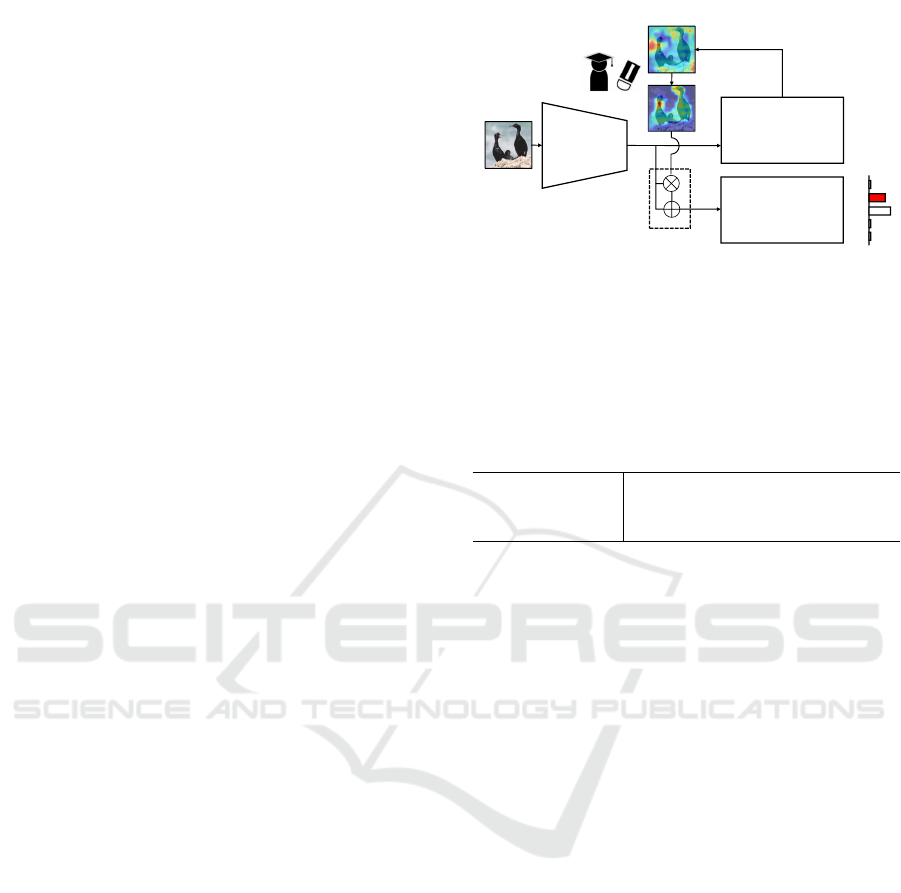
the inference results. Specifically, as shown in Figure
2, we investigate the relationship between unneces-
sary attention areas and class probability by deleting
unnecessary attention areas from the attention map
when misrecognition occurs in ABN and performing
inference again.
The ABN model trained on the CUB-200-2010
dataset was used to investigate the relationship be-
tween unwanted attention areas and class probabil-
ity. First, we investigate changes in the probabil-
ity distribution using three samples in the CUB-200-
2010 dataset that are misrecognized by ABN. Figure
Attention
mechanism
Feature
extractor
Attention branch
Perception branch
Attention map
Input
GT
𝑝
𝑥
Figure 2: Flow of Correcting Attention. We remove at-
tention areas outside the recognition target of Attention ac-
quired by ABN and weight the feature map by the Attention
mechanism. Then, the class probability of the perception
branch, which is the final evaluation, is investigated.
Table 1: Average of the highest incorrect class probability
in 10 randomly selected samples [%]. Bold letters indicate
the lowest the incorrect class probability.
Incorrect class probability
ABN 41.61
Reduction 26.61
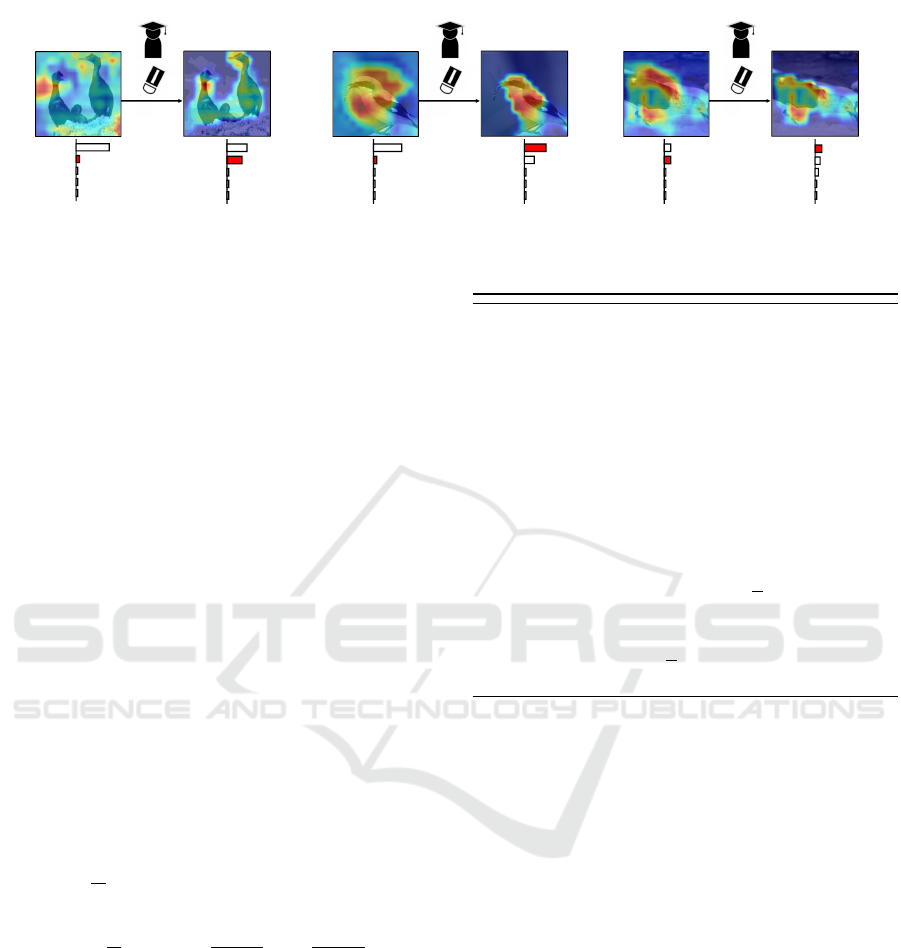
3 shows the probability distributions of the three sam-
ples. As shown in Figure 3, the incorrect class prob-
ability decreases, and the correct class probability in-
creases in all cases. Second, we investigate the varia-
tion of the highest incorrect class probability using 10
randomly selected samples from the CUB-200-2010
dataset. Table 1 shows the average of the highest
incorrect answer class probabilities for the 10 sam-
ples. As shown in Table 1, we observed that the in-
correct answer class probabilities decreased when the
unnecessary regions were manually removed. Based
on these findings, we believe it is important to inten-
tionally reduce the incorrect answer class probability
and incorporate such a learning method into ABN and
AMB.
3.2 ABN + COT
This paper aims to reduce unnecessary attention areas
by introducing COT to the ABN and flattening the in-
correct answer class probability.
3.2.1 Network Structure
The structure of ABN + COT. It first extracts a feature
map from an input image by a feature extractor and
then inputs the feature map into the attention module
to generate an attention map. The feature map and
attention map are used for the attention mechanism
to enhance the features of the highlighted region and
obtain classification results by the perception branch.
Complement Objective Mining Branch for Optimizing Attention Map
107
Clark Nutcracker
0.48%
GT
18.39%
14.25%
Western Gull
51.71%
GT
𝑝
𝑥
GT: Loggerhead Shrike
78.46%
Great Grey Shrike
6.48%
GT
𝑝
𝑥
91.12%
7.77%
56.45%
Brandt Cormorant
40.85%
GT
𝑝
𝑥
GT:Pelagic Cormorant
Brandt Cormorant
GT
𝑝
𝑥
GT
7.52%
Western_Gull
𝑝
𝑥
GT:Slaty backed Gull
13.83%
𝑝
𝑥
21.72%
Great Grey Shrike
12.35%
Clark Nutcracker
Figure 3: Probability distribution of three samples misrecognized by ABN in the CUB-200-2010 dataset. Blue letters indicate
incorrect class names.
3.2.2 Learning Algorithm
Algorithm 1 alternates between minimizing the cross-
entropy loss that brings the correct answer class prob-
ability close to 1 and flattening the incorrect answer
class probability. The specific method is described
below.
Step 1. We first initialize the network’s parame-
ters and train the network.
Step 2. We update the network parameters. The
loss is calculated by two loss values: L
att
and L
per
.
L
att
is a cross-entropy loss between the output of the
attention module and the correct label. Likewise, L
per
is a cross-entropy loss between the output of the per-
ception branch and the correct label. The entire loss
function L is defined as
L = L
att
+ L
per
. (1)
Step 3. Flatten the incorrect class probability by
updating the weights to minimize the complement en-
tropy. Let ˆy be the predicted probability distribution
for input, H (·) be the entropy function, and g be the
ground truth. Complement entropy C( ˆy
¯
C
) is defined
by
C( ˆy
¯
C
) =
1
N
N
∑
i=1
H ( ˆy
i
¯
C
)
= −
1
N
N
∑
i=1
K
∑
j=1, j̸=g
ˆy
i j
1 − ˆy
ig
log
ˆy
i j
1 − ˆy
ig
.
(2)
Step 4. Repeat Steps 2 and 3 for each iteration.
3.3 ABN + COMB
This paper aims to reduce unnecessary attention areas
by introducing COT to the AMB and flattening the
incorrect answer class probability.
3.3.1 Network Structure
ABN + COMB automatically optimizes the attention
map by introducing an AMB into the ABN. Figure
Require: Total number of samples N, Class label
y
i
, iteration n, probability ˆy, Ground truth g,
Predicted probabilities of the correct classes ˆy
ig
,
Complement entropy
¯
C, Entropy function H ,
Predicted probabilities of the complement (incor-
rect) classes ˆy
i
¯
C
Initialize: Update weights to flatten incorrect an-
swer class probability Load weights from net-
work trained in ABN.
1: for t ← 1 to n do
2: At Attention branch and Perception branch
Update weights so that the correct answer class
probability approaches 1.:−
1
N
∑
N
i=1
log( ˆy
ig
)
3: At Attention branch and Perception branch
Update weights to flatten incorrect answer
class probability:
1
N
∑
N
i=1
H ( ˆy
i
¯
C
)
4: end for
Figure 4: ABN + COT.
5 shows the structure of ABN + COMB. It first ex-
tracts a feature map from an input image by a feature
extractor and then inputs the feature map into the at-
tention module to generate an attention map. The fea-
ture map and attention map are used for the attention
mechanism to enhance the features of the highlighted
region and obtain classification results by the percep-
tion branch. Our method further utilizes the AMB
to optimize the attention map during the fine-tuning
step.
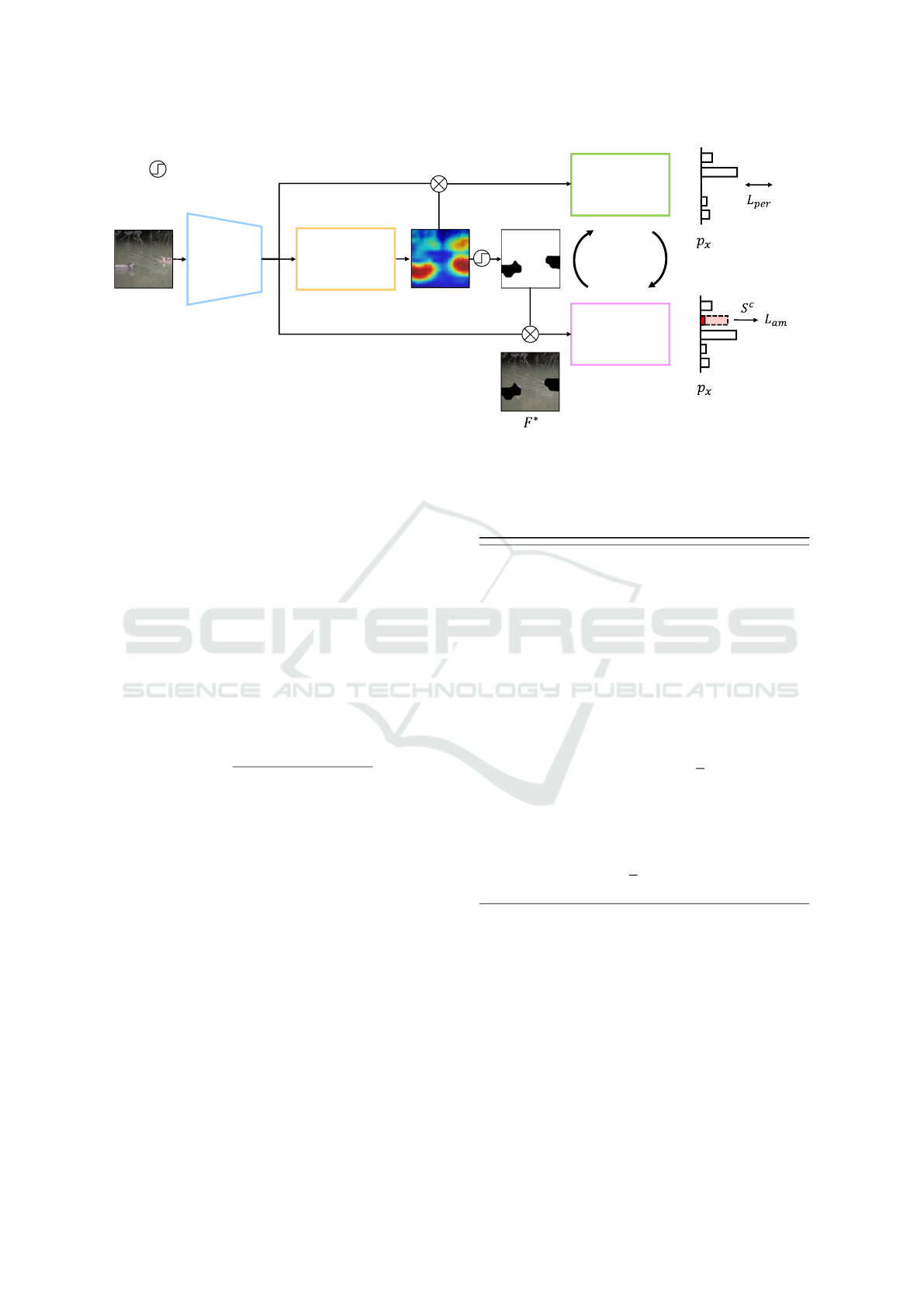
3.3.2 Attention Mining Branch
The AMB learns to acquire regions that are effective
for recognition. Figure 5 shows the optimization flow
of the attention map by the AMB. The structure of
the AMB is the same as that of the perception branch.
Also, the branch shares the weights with the percep-
tion branch and outputs class probabilities by using
a masked feature map. If the class probability of the
target class decreases, we can assume that the masked
region hides the target objects. Therefore, by learning
to minimize the class probability of the target class,
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
108
GT
Attention map
Perception
branch
Attention mechanism
Input
Feature
extractor
Attention
module
Attention
mining branch
Weight
share
Label
0
1
0
0
0
Mask
:binarization
Figure 5: The structure of ABN + AMB. In our method, Attention is binarized to obtain a mask, and the mask is applied to
the feature map to obtain a feature map F
∗
that hides the highlighted area. This is input to Attention mining branch, which
shares weights with Perception branch, to obtain class probabilities. If the class probability of the target class S
c
decreases,
we can assume that the masked region hides the target objects. Therefore, by learning to minimize the class probability of the
target class, the attention map is optimized to gaze only at the target object.
the attention map is optimized to gaze only at the tar-
get object. The AMB shares weights with the percep-
tion branch. This weight share enables the perception
branch to reflect the weights of the AMB, which has
learned to gaze only at the object to be recognized.
3.3.3 Mask Generation Method
For generating a masked feature map, we use the at-
tention maps obtained from the attention module. Let
A be the attention map, and σ be the threshold of at-
tention. The mask T is defined by
T (A) =
1
1 + exp(−100(A − σ))
. (3)
By using the Sigmoid function, the process is
equivalent to binarization while maintaining the gra-
dient. Then, we multiply the feature map obtained
from the feature extractor and the mask. Let F be the
feature map from the feature extractor. The masked
feature map F
∗
is defined by
F
∗
= F − (T (A) ⊙ F). (4)
Consequently, we can generate a masked feature map
that hides the highlighted area.
3.3.4 Learning Algorithm
Algorithm 2, minimization of the correct answer class
probability and flattening of the incorrect answer class
probability are alternately repeated in the AMB. The
specific method is described below.
Step 1. We first initialize the network’s parame-
ters and train the network.
Require: Total number of samples N, Class label
y
i
, iteration n, probability ˆy, Ground truth g,
Predicted probabilities of the correct classes ˆy
ig
,
Complement entropy
¯
C, Entropy function H ,
Predicted probabilities of the complement (incor-
rect) classes ˆy
i
¯
C
Initialize: Update weights to flatten incorrect an-
swer class probability Load weights from net-
work trained in ABN.
1: for t ← 1 to n do
2: At Attention branch and Perception branch
Update weights so that the correct answer class
probability approaches 1.:−
1
N
∑
i=1
N
log( ˆy
ig
)
At Attention mining branch
Update weights so that the correct answer class
probability approaches 0.
3: At Attention mining branch
Update weights to flatten incorrect answer
class probability:
1
N
∑
N
i=1
H ( ˆy
i
¯
C
)
4: end for
Figure 6: ABN + COMB.
Step 2-1. We generate the mask from an atten-
tion map obtained by the attention module. Then,
the output of the feature extractor is multiplied by the
generated mask to obtain the masked feature map.
Step 2-2. We input the masked feature map gen-
erated in step 2-1 to the AMB and obtain class prob-
abilities as an output. Then, we compute a loss of
the AMB L
am
from the output probability and the
ground truth. L
am
is the sum of the class probabili-
ties of each sample output from the AMB. This means
Complement Objective Mining Branch for Optimizing Attention Map
109

that the smaller loss L
am
successfully hides the ob-
ject to be recognized. Let c ∈ {1, . . . , C} be class and
i ∈ {1, . . . , n} be a sample in a mini-batch. We denote
the classification probability of correct class c for the
i-th masked feature map as S
c
i
. The loss L
am
is defined
as follows:
L
am
=
n
∑
i=1
S
c
i
. (5)
Step 2-3. We update the network parameters.
The loss is calculated by three loss values: L
am
, L
att
,
and L
per
. L
att
is a cross-entropy loss between the
output of the attention module and the correct label.
Likewise, L
per
is a cross-entropy loss between the
output of the perception branch and the correct label.
The entire loss function L is defined as
L = L
att
+ L
per
+ αL
am
, (6)
where α is a scaling parameter for L
am
.
Step 3. Flatten the incorrect class probability by
updating the weights to minimize the complement en-
tropy. Let ˆy be the predicted probability distribution
for input, H (·) be the entropy function, and g be the
ground truth. The complement entropy C( ˆy
¯
C
) is de-
fined as
C( ˆy
¯
C
) =
1
N
N
∑
i=1
H ( ˆy
i
¯
C
)
= −
1
N
N
∑
i=1
K
∑
j=1, j̸=g
ˆy
i j
1 − ˆy
ig
log
ˆy
i j
1 − ˆy
ig
.
(7)
By setting ˆy
ig
= 0, the correct answer class probabil-
ity is calculated to be 0 and the remaining incorrect
answer class probabilities are flat.
Step 4. Repeat Steps 2 and 3 for each iteration.
4 EXPERIMENTS
To evaluate the effectiveness of the proposed method,
we performed evaluation experiments on a fine-
grained image recognition task.
4.1 Experimental Settings
We used the Caltech-UCSD Birds 200-2010 (CUB-
200-2010) dataset (Welinder et al., 2010) and the
Stanford Dogs dataset (Khosla et al., 2011). ResNet-
50 (He et al., 2016) was utilized as the base network.
The number of training updates was 300 epochs each
for the ABN pre-training and the proposed method.
The batch size was set to 16. The coefficient α of
L
am
was set to 0.0001. The mask threshold was set
to 0.78 for the CUB-200-2010 dataset and to 0.40
Table 2: Top-1 and top-5 accuracy on CUB-200-2010
dataset [%]. Bold letters indicate the highest accuracy.
model Top-1 Top-5
ABN 31.68 57.01
ABN + AMB 33.53 58.68
Human knowledge 37.42 62.08
ABN + COT 43.98 66.83
ABN + COMB 39.76 66.57
Table 3: Top-1 and top-5 accuracy on Stanford Dogs dataset
[%]. Bold letters indicate the highest accuracy.
model Top-1 Top-5
ABN 71.81 93.02
ABN + AMB 71.99 92.80
ABN + COT 72.33 91.12
ABN + COMB 73.59 93.89
for the Stanford Dogs dataset. As comparative meth-
ods, we adopted ABN (Fukui et al., 2019), ABN +
AMB(Iwayoshi et al., 2021), and the conventional
fine-tuning method by human knowledge (Mitsuhara
et al., 2021). In this experiments, we call the method
proposed by Mitsuhara et al. to ”human knowledge”.
4.2 Experimental Results
Table 2 compares the top-1 and top-5 accuracies for
CUB-200-2010. In the results of CUB-200-2010, the
recognition accuracy of the proposed method was bet-
ter than that of ABN, ABN + AMB, and Human
knowledge.
Table 3 compares the top-1 and top-5 accuracies
for the Stanford Dogs dataset. In the Stanford Dogs
dataset, the proposed method improved the recogni-
tion accuracy of Top-1 compared with ABN and ABN
+ AMB. Especially, the recognition accuracy of ABN
+ COT was 12.30 points better than that of ABN.
In the Stanford Dogs dataset, the proposed method
improved the recognition accuracy of Top-1 com-
pared with ABN. Although the recognition accuracy
of Top-1 was lower than that of the method introduc-
ing human knowledge, our method successfully im-
proved accuracies without manually modified atten-
tion maps. Especially, the recognition accuracy of
ABN + COMB was 1.78 points better than that of
ABN. These results show that the proposed method
contributes to the recognition performance.
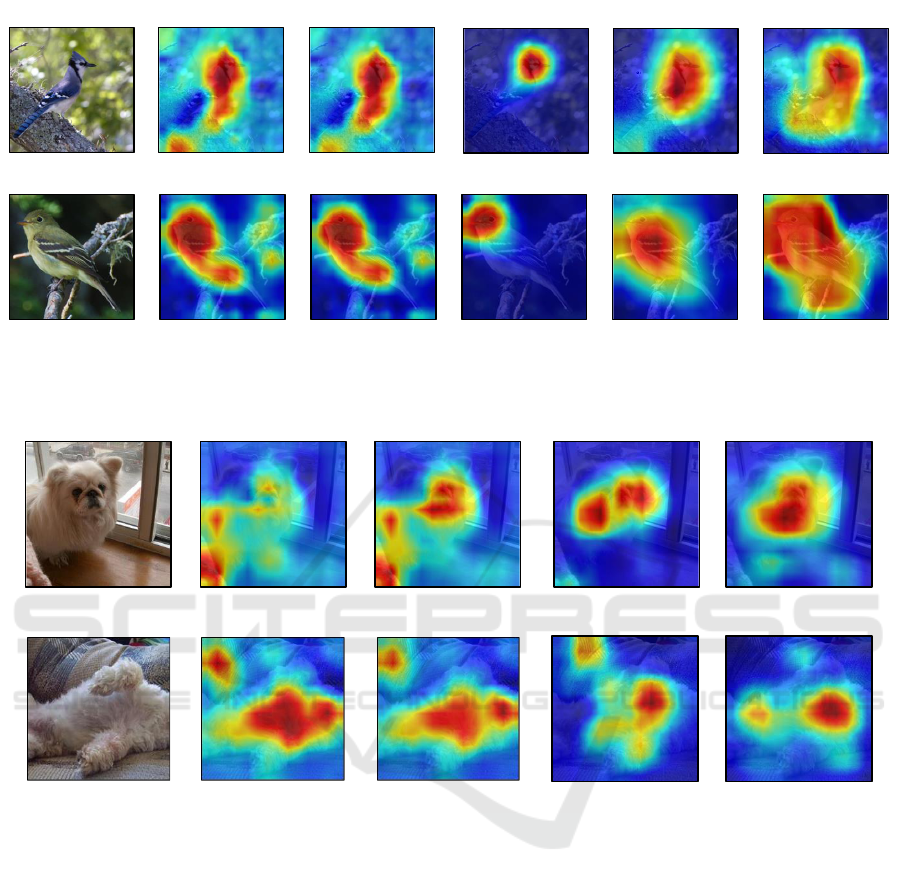
4.3 Visualization of Attention Maps
We qualitatively evaluated the obtained attention
maps. Figures 7 and 8 show examples of attention
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
110
Blue Jay
(67.54%)
ABN + AMB
GT:Blue Jay
Blue Grosbeak
(79.33%)
Input
ABN
Blue Jay
(76.95%)
Human knowledge
Blue Jay
(34.36%)
ABN + COT
Blue Jay
(87.76%)
ABN + COMB
Yellow bellied Flycatcher
(62.34%)
Yellow bellied Flycatcher
(59.28%)
GT: Yellow bellied
Flycatcher
Yellow bellied Flycatcher
(99.81%)
Yellow bellied Flycatcher
(67.24%)
Yellow bellied Flycatcher
(76.23%)
Figure 7: Examples of attention maps on CUB-200-2010. Class names and confidences of the highest class probabilities are
shown below the Attention map.
Pekinese
(50.58%)
ABN + AMB
GT: Pekinese
Pomeranian
(39.48%)
Input
ABN
Pekinese
(33.49 %)
ABN + COT
Pekinese
(73.50%)
ABN + COMB
Shih-Tzu
(45.58%)
Shih-Tzu
(35.80%)
GT: Shih-Tzu
Shih-Tzu
(58.92%)
Shih-Tzu
(45.95%)
Figure 8: Examples of attention maps on Stanford Dogs. Class names and confidences of the highest class probabilities are
shown below the Attention map.
maps on CUB-200-2010 and Stanford Dogs, respec-
tively. As shown in Fig. 7, the attention maps of
human knowledge-based fine-tuning could identify
class objects by focusing on more localized regions.
Compared with ABN and ABN + AMB, the pro-
posed method reducing the attention area outside the
recognition target while gaining the effective area for
recognition. Moreover, compared with ABN, ABN
+ AMB, and human knowledge-based fine-tuning,
ABN + COMB improved the class probability.
In the case of the Stanford Dogs dataset, as shown
in Fig. 8, compared with ABN and ABN + AMB, the
proposed method reduced the attention area outside
the recognition target while gaining the effective area
for recognition.
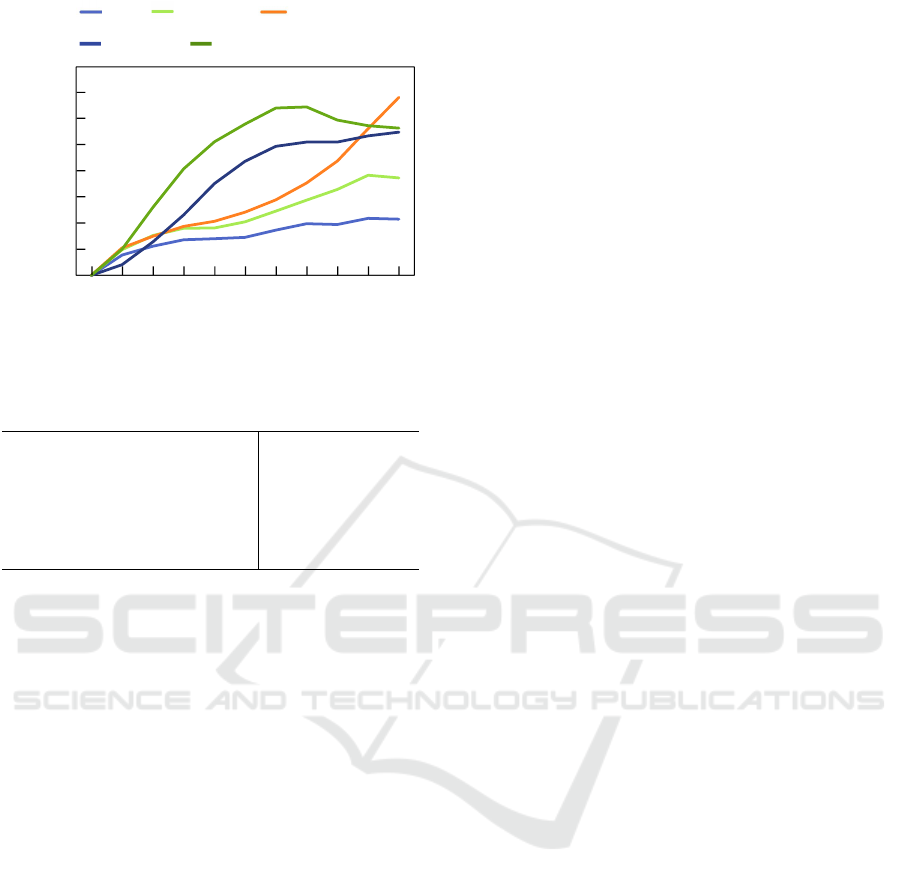
4.4 Quantitative Evaluation of
Attention Map
Next, we quantitatively evaluated the effectiveness of
the attention acquired by the proposed method. As an
evaluation metric, we used insertion (Vitali Petsiuk
and Saenko, 2018). In this evaluation, we masked
images in the lower attention region and computed
the accuracy for the masked images. We first eval-
uated the accuracy while changing the percentage of
masked regions and then checked the average class
probability of each sample for each percentage of in-
sertions and evaluated them by the area under curve
(AUC). The higher the AUC, the more effective the
attention map is for recognition, as insertion is eval-
uated only in the more highlighted region in the at-
Complement Objective Mining Branch for Optimizing Attention Map
111
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
0 0.2 0.4 0.6 0.8 1
confidence
Percentage of inser�on
Human knowledge
ABN
ABN + AMB
ABN + COT ABN + COMB
Figure 9: Insertion metrics on CUB-200-2010 dataset.
Table 4: Area Under Curve for Insertion metrics on CUB-
200-2010 dataset. Bold letters indicate the highest score.
model AUC
ABN 0.0302
ABN + AMB 0.0451
Human knowledge 0.0576
ABN + COT 0.0704
ABN + COMB 0.0921
tention map. In this experiment, we used only sam-
ples that ABN misclassified to evaluate misclassifica-
tion improvements. Figure 9 and Table 4 show the
results of insertion for each dataset. Table 4 shows
that the AUC of the proposed method was higher than
that of ABN and ABN + AMB, human knowledge-
based fine-tuning. These results demonstrate that the
proposed method can optimize the attention map.
5 CONCLUSION
In this paper, we investigated the relationship between
the attention area outside the recognition target and
the incorrect answer class probability and proposed a
method to optimize an attention map by introducing
Complement Objective Training (COT) into the at-
tention branch network (ABN) and attention mining
branch (AMB). Our experiments showed that the pro-
posed method improved both the attention area and
the recognition accuracy. Further, evaluation with in-
sertion metrics demonstrated that the attention map
obtained by the proposed method could capture the
effective region for recognition. Our future work will
apply this technology to segmentation and multitask-
ing.
ACKNOWLEDGEMENTS
This paper is based on results obtained from a
project, JPNP20006, commissioned by the New En-
ergy and Industrial Technology Development Organi-
zation (NEDO).
REFERENCES
Alex, K., S. I. and Hinton, G. E. (2012). Paper templates.
In ImageNet Classification with Deep Convolutional
Neural Networks. SCITEPRESS.
Bojarski, M., Choromanska, A., Choromanski, K., Firner,
B., Jackel, L., Muller, U., and Zieba, K. (2016). Vi-
sualbackprop: efficient visualization of cnns. arXiv
preprint arXiv:1611.05418.
Chattopadhay, A., Sarkar, A., Howlader, P., and Balasub-
ramanian, V. N. (2018). Grad-cam++: Generalized
gradient-based visual explanations for deep convolu-
tional networks. In 2018 IEEE winter conference on
applications of computer vision (WACV), pages 839–
847. IEEE.
Chen, H.-Y., Wang, P.-H., Liu, C.-H., Chang, S.-C.,
Pan, J.-Y., Chen, Y.-T., Wei, W., and Juan, D.-
C. (2019). Complement objective training. arXiv
preprint arXiv:1903.01182.
Fong, R., Patrick, M., and Vedaldi, A. (2019). Under-
standing deep networks via extremal perturbations
and smooth masks. In Proceedings of the IEEE/CVF
International Conference on Computer Vision (ICCV).
Fong, R. C. and Vedaldi, A. (2017). Interpretable explana-
tions of black boxes by meaningful perturbation. In
Proceedings of the IEEE international conference on
computer vision, pages 3429–3437.
Fukui, H., Hirakawa, T., Yamashita, T., and Fujiyoshi, H.
(2019). Attention branch network: Learning of atten-
tion mechanism for visual explanation. In Proceed-
ings of the IEEE/CVF conference on computer vision
and pattern recognition, pages 10705–10714.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 770–778.
Iwayoshi, T., Mitsuhara, M., Takada, M., Hirakawa, T., Ya-
mashita, T., and Fujiyoshi, H. (2021). Attention min-
ing branch for optimizing attention map. In 2021 17th
International Conference on Machine Vision and Ap-
plications (MVA), pages 1–5. IEEE.
Khosla, A., Jayadevaprakash, N., Yao, B., and Li, F.-F.
(2011). Novel dataset for fine-grained image catego-
rization: Stanford dogs. In Proc. CVPR workshop on
fine-grained visual categorization (FGVC), volume 2.
Citeseer.
Lin, M., Chen, Q., and Yan, S. (2013). Network in network.
arXiv preprint arXiv:1312.4400.
Mitsuhara, M., Fukui, H., Sakashita, Y., Ogata, T., Hi-
rakawa, T., Yamashita, T., and Fujiyoshi, H. (2021).
Embedding human knowledge in deep neural network
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
112

via attention map. In The International Conference
on Computer Vision Theory and Applications, pages
626–636.
Ribeiro, M. T., Singh, S., and Guestrin, C. (2016). ” why
should i trust you?” explaining the predictions of any
classifier. In Proceedings of the 22nd ACM SIGKDD
international conference on knowledge discovery and
data mining, pages 1135–1144.
Selvaraju, R. R., Cogswell, M., Das, A., Vedantam, R.,
Parikh, D., and Batra, D. (2017). Grad-cam: Visual
explanations from deep networks via gradient-based
localization. In Proceedings of the IEEE International
Conference on Computer Vision (ICCV).
Smilkov, D., Thorat, N., Kim, B., Vi
´
egas, F., and Watten-
berg, M. (2017). Smoothgrad: removing noise by
adding noise. arXiv preprint arXiv:1706.03825.
Springenberg, J. T., Dosovitskiy, A., Brox, T., and Ried-
miller, M. (2014). Striving for simplicity: The all con-
volutional net. arXiv preprint arXiv:1412.6806.
Vitali Petsiuk, A. D. and Saenko, K. (2018). Rise: Ran-
domized input sampling for explanation of black-box
models. In British Machine Vision Conference.
Welinder, P., Branson, S., Mita, T., Wah, C., Schroff, F., Be-
longie, S., and Perona, P. (2010). Caltech-ucsd birds
200.
Zhang, Q., Rao, L., and Yang, Y. (2021). Group-cam: group
score-weighted visual explanations for deep convolu-
tional networks. arXiv preprint arXiv:2103.13859.
Zhou, B., Khosla, A., Lapedriza, A., Oliva, A., and Tor-
ralba, A. (2016). Learning deep features for discrim-
inative localization. In Proceedings of the IEEE con-
ference on computer vision and pattern recognition,
pages 2921–2929.
Complement Objective Mining Branch for Optimizing Attention Map
113
