
Learning Spatio-Temporal Features via 3D CNNs to Forecast
Time-to-Accident
Taif Anjum
1
, Louis Chirade
2
, Beiyu Lin
2
and Apurva Narayan
1
1
Department of Computer Science, University of British Columbia, Kelowna, Canada
2
Department of Computer Science, University of Nevada, Las Vegas, U.S.A.
Keywords:
Collision Avoidance Systems, Deep Learning, Spatio-Temporal Feature Learning, 3D Convolutional Neural
Networks.
Abstract:
Globally, traffic accidents are one of the leading causes of death. Collision avoidance systems can play a
critical role in preventing accidents or minimizing their severity. Time-to-accident (TTA) is considered the
principal parameter for collision avoidance systems allowing for decision-making in traffic, dynamic path
planning, and accident mitigation. Despite the importance of TTA, the literature has insufficient research on
TTA estimation for traffic scenarios. The majority of recent work focuses on accident anticipation by providing
a probabilistic measure of an immediate or future collision. We propose a novel approach of time-to-accident
forecasting by predicting the exact time of the accident with a prediction horizon of 3-6 seconds. Leveraging
the Spatio-temporal features from traffic accident videos, we can recognize accident and non-accident scenes
while forecasting the TTA. Our method is solely image-based, using video data from inexpensive dashboard
cameras allowing for an accessible collision avoidance tool that can be integrated with any vehicle. Addi-
tionally, we present a regression-based 3D Convolutional Neural Network (CNN) architecture that requires
significantly less parameters compared to its counterparts making it feasible for real-time usage. Our best
models can estimate TTA with an average prediction error of 0.30s on the Car Crash Dataset (CCD) and
0.79s on the Detection of Traffic Anomalies (DoTA) dataset elucidated by the longer prediction horizon. Our
comprehensive experiments suggest that spatio-temporal features from sequential frames perform significantly
better than only spatial features extracted from static images.
1 INTRODUCTION
According to a global report on road safety, traffic ac-
cidents account for over 3,700 daily deaths which add
up to 1.35 million deaths annually (World Health Or-
ganization, 2018). To combat this, automakers are in-
cluding collision avoidance features as part of their
Advanced Driver Assistance Systems (ADAS). Stud-
ies show that Collision avoidance features reduced
front-to-rear crashes of cars by 50%, trucks by 41%
and crashes with injuries by 56%, (The Insurance In-
stitute, 2022). Time-to-accident (TTA) is considered
the principal parameter for collision avoidance sys-
tems allowing for better decision-making in traffic,
dynamic path planning, and accident mitigation (Saf-
farzadeh et al., 2013; Manglik et al., 2019). We de-
fine TTA as the the time duration before collision be-
tween two (or more) road users is inevitable. De-
spite the importance of TTA, recent studies focus on
the early anticipation of accidents but fail to esti-
mate or predict the TTA. One study (Suzuki et al.,
2018) proposes an adaptive loss function for early
risk anticipation and a Quasi-Recurrent Neural Net-
work (QRNN) to learn the Spatio-temporal features.
Their model generates the probability of a possible
accident with a prediction horizon of 3 seconds, how-
ever, it does not predict the time of the accident. Sim-
ilarly, (Bao et al., 2020) proposes a Graph Convolu-
tional Network (GCN) with RNN cell to learn Spatio-
temporal features followed by Bayesian Neural Net-
work (BNNs) to generate accident probability. (Chan
et al., 2016) proposed a Dynamic-Spatial Attention
Recurrent Neural Network (DSA-RNN) for anticipat-
ing accidents from dashboard camera videos. Such
accident anticipation technologies intend to previse
an accident before it takes place, however, only be-
ing able to anticipate or detect a possible accident is
not enough. For effective decision-making, path plan-
ning, and collision avoidance, we need a temporal es-
timation for the accident.
532
Anjum, T., Chirade, L., Lin, B. and Narayan, A.
Learning Spatio-Temporal Features via 3D CNNs to Forecast Time-to-Accident.
DOI: 10.5220/0011697900003393
In Proceedings of the 15th International Conference on Agents and Artificial Intelligence (ICAART 2023) - Volume 3, pages 532-540
ISBN: 978-989-758-623-1; ISSN: 2184-433X
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

Figure 1: Prediction samples from our test data. First two columns represent accident scenes and the third column represents
non-accident scenes.
To bridge this gap in existing research, we pro-
pose to estimate the exact time of the accident with
a prediction horizon of 3-6 seconds. Our approach
utilizes inexpensive dashboard cameras and does not
require any additional sensors. This can allow any
vehicle to have a collision avoidance tool for as lit-
tle as 50$ whereas existing collision avoidance sys-
tems can cost over $2,500 and an extra $3,000 on
average for repair in-case of an accident (Wardlaw,
2020). Figure 2 shows samples from our test data
annotated with the estimated and ground truth value.
We select two publicly available datasets, namely, the
Car Crash Dataset (CCD) and Detection of Traffic
Anomaly (DoTA) to test our proposed method. Both
these datasets have frame-wise annotations indicat-
ing the exact frame where the accident began. We
use these annotations to calculate the TTA value for
each video which is our ground truth. The annota-
tions are in the form of binary labels associated with
each frame indicating if the frame is an accident (pos-
itive) or non-accident (negative) frame. The first pos-
itive label indicates the beginning of the accident. As
there are 10 frames per second (fps) in each video,
each frame represents 0.1 seconds. Therefore, the first
positive label represents the exact time step where the
accident began. For example, if a video is 5 seconds
long then there are 50 frames (10 fps) in total. If the
first positive label is on the 31st frame, then the TTA
for the video will be 3.1 seconds. Using this method-
ology, we label each accident video with its measured
TTA value. For non-accident videos, we label them as
-1, indicating an infinite TTA. This allows our model
to recognize both accident and non-accident scenes
while estimating the TTA as shown in figure 1. Our
approach is to predict the TTA of each video using
only the first N-frames. Given the fact that we require
a model that is both efficient and highly accurate for
real-world implementation, we present a 3D CNN re-
gression architecture that is efficient, lightweight and
high performing. We test our architecture with vary-
ing spatial resolution and temporal depth to identify
the role they play in the model’s performance. Our
best model achieves a mean absolute error (MAE)
of 0.30 seconds with only 8 frames from the CCD
dataset with an average prediction horizon of 3 sec-
onds. Our model obtains a MAE of 0.79 seconds
on the DoTA dataset with the first 16 frames which
has a prediction horizon of 6 seconds. Furthermore,
our model can recognize accident and non-accident
scenes with 100% accuracy across both datasets. Our
comparative analysis showed our model outperforms
an extensive list of state-of-the-art CNN architectures.
The contribution of this paper is as follows - 1) Novel
approach of forecasting time-to-accident and accident
classification. 2) Presents a 3D CNN architecture that
demonstrates state-of-the-art performance with fewer
parameters. 3) Demonstrates the superiority of spatio-
temporal features over only spatial features for the
proposed task. 4) Analyzes the role of spatial resolu-
tion and temporal depth for our specific application.
2 RELATED WORK
Time-to-Accident (TTA) refers to the period be-
fore two (or more) objects will collide as defined by
(Hayward, 1972). They proposed time-measure-to-
collision (TMTC) as a measure of danger to an ac-
Learning Spatio-Temporal Features via 3D CNNs to Forecast Time-to-Accident
533

Figure 2: Time-To-Accident (TTA) prediction pipeline. If
the estimated value is less than zero the scene will be con-
sidered a non-accident scene otherwise there is a risk of ac-
cident.
cident which was estimated using the velocity and
distance between vehicles. The study by (Jim
´
enez
et al., 2013) builds on that work and proposes a
more computationally efficient and accurate calcula-
tion of TTA between two vehicles colliding at con-
stant speed along a straight path. These studies
provide mathematical equations for TTA estimation,
however, they do not discuss the application side of
it. With the emergence of deep learning and advance-
ments in computer vision, TTA calculation and esti-
mation techniques have evolved. TTA estimations can
now be done using object detection, tracking, instance
segmentation, and trajectory prediction (Tøttrup et al.,
2022). TTA is not only limited to automotive vehi-
cles but critical component for navigation in robotics,
vessels, and Unmanned Aerial Vehicles. One study
(Tøttrup et al., 2022) introduced a framework that uti-
lizes object detection to detect objects around a vessel
and generate bounding boxes which are used to track
the objects and produce velocity vectors. In robot
navigation TTA is estimated by tracking the trajectory
and measuring the velocity of surrounding objects or
pedestrians (Bewley et al., 2016; Sharma et al., 2018).
A study by (Manglik et al., 2019) proposes time-to-
near collision prediction between a suitcase-shaped
robot and nearby pedestrians using a monocular cam-
era and lidar sensors. Combined with the video and li-
dar data they predict when pedestrians will be within
one meter of the robot from a sequence of frames.
The aforementioned approaches rely on high-quality
sensors and depth imaging devices to detect and track
objects. However, sensor noise and error in object
detection can easily cause such approaches to fail. In-
accuracies in-depth estimation or 2D bounding box
detection can result in significant changes in velocity
resulting in inaccurate trajectory estimates (Manglik
et al., 2019).
Spatio-Temporal Feature Learning is necessary
for video tasks including action recognition, scene
recognition, accident anticipation, pose estimation,
and more. Spatio-temporal features provide the mo-
tion information from a sequence of images which
can be used to recognize activities in sequential data
such as videos. Before the success of CNN and its
variants, Spatio-temporal features were handcrafted
using algorithms such as SIFT-3D, HOG-3D and
Motion Boundary Histogram. However, in recent
years automated Spatio-temporal feature learning has
gained tremendous success due to the emergence of
Deep Learning (DL) algorithms. Spatio-temporal fea-
ture learning in the DL domain can be split into two
categories, (i) two-stream method where spatial and
temporal features are extracted separately and then
fused (ii) Spatio-temporal kernels are applied directly
to the videos. Combinations of CNNs and RNNs be-
long to the first category. Like the work by (Yue-
Hei Ng et al., 2015) that uses GoogleLet to extract the
spatial features, an LSTM for temporal features and
fuses them before feeding to the fully connected lay-
ers. 3D CNNs fall into the second category where 3D
convolutional kernels are directly applied sequences
of images or videos to capture both the spatial and
temporal features.
Accident Anticipation methods seek to predict
an accident before it takes place. For vision-based
approaches, we require a first-person or ego-centric
view such as the view from dashboard cameras. Sev-
eral works proposed Spatio-temporal learning frame-
works along with car accident datasets comprised of
videos from dashboard cameras. One study (Suzuki
et al., 2018) proposed a Near-miss Incident DataBase
(NIDB) for near-miss traffic accident anticipation.
To evaluate their dataset they present an Adaptive
Loss for Early Anticipation (AdaLEA) and Quasi-
Recurrent Neural Network (QRNN). AdaLEA is a
loss function that aims to learn earlier anticipation as
training progresses. The QRNN is an efficient alter-
native to LSTM for temporal feature learning. Their
system outputs a probability of a possible accident in
the future and can anticipate a near-miss incident or
accident about 3 seconds in advance. Similarly, (Bao
et al., 2020) proposes a Graph Convolutional Network
(GCN) with RNN cell to learn Spatio-temporal fea-
tures followed by Bayesian neural network (BNNs) to
generate accident probability. (Chan et al., 2016) pro-
posed a Dynamic-Spatial Attention Recurrent Neural
Network (DSA-RNN) for anticipating accidents from
dashcam videos. They use object detection to identify
candidate objects and incorporate spatial and tempo-
ral features from sequential images using their model.
The aforementioned works can anticipate a possible
accident, however, they fail to predict the exact time
of the accident.
3 DATASETS
Our objective is to forecast the time-to-accident for
automotive vehicles based on only visual data. For
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
534

this, we require video data from the driver’s field of
view such as videos from dashboard cameras. How-
ever, such data is scarce in the literature. To the best
of our knowledge, there are four publicly available
datasets, namely, Dashcam Accident Dataset (DAD)
(Chan et al., 2016), AnAn Accident Detection (A3D)
(Yao et al., 2019), Detection of Traffic Anomaly
(DoTA) (Yao et al., 2022) and the Car Crash Dataset
(CCD) (Bao et al., 2020). We exclude DAD from
our experiments to the lack of annoatations. DoTA
is an extension of A3D where the authors increased
the number of accident clips to 4,677 and added more
categories of accidents.
DoTA, A3D and the Car Crash Dataset (CCD)
is constructed from accident videos collected from
YouTube. The videos are structured such that the ac-
cident occurs within the last two seconds of the video.
For our particular application of forecasting time-to-
accident, we require annotations indicating the start
time of accidents. As CCD and DoTA provide such
annotations, they are appropriate datasets for our ex-
periments. In addition to accident clips, we also re-
quire non-accident scenes to create a model robust to
false alarms. CCD includes 3,000 randomly sampled
normal driving video clips from the Berkley Driving
Dataset (BDD100K) (Yu et al., 2020) which are also
recorded via dashboard cameras. These clips are used
as negative or non-accident samples for our experi-
ments. Each non-accident clip is 5 seconds long with
10 frames per second.
Table 1: Original size and characteristics of traffic accident
datasets with egocentric view.
Name Positive Samples Length (in s) Fps Annotations
DAD 1,130 5 20 No
A3D 1,500 2.3-20.8 10 Yes
DoTA 4,677 2.3-20.8 10 Yes
CCD 1,500 5 10 Yes
3.1 Pre-Processing
The videos in both datasets have annotations indicat-
ing if the ego vehicle was involved in the crash or not.
Ego vehicle is defined as the subject whose behav-
ior is of primary interest. In our case, the vehicle on
which the camera is mounted will be referred to as the
ego vehicle. The videos where the ego vehicle was
not involved in the crash included accidents between
other road users which were captured by the ego ve-
hicle’s dashboard camera. The ego vehicle being in-
volved in the crash means there was a direct collision
between the ego vehicle and other road user(s). These
two scenarios are illustrated in figure 3. Our goal is
to develop a system that will warn the ego vehicle of
a potential danger to itself. Considering that, we re-
move the videos where the ego vehicle is not involved
in the crash.
Figure 3: The vehicle of interest (i.e., ego vehicle) is the
red car. a) Scenario where the ego vehicle is involved in
the crash. b) Scenario where the ego vehicle witnesses an
accident.
The final data processing step was data augmenta-
tion. To perform the augmentation, we deconstructed
the videos and applied augmentation to each frame
before re-compiling them as a video. Various com-
binations of augmentation techniques were applied
to the data such as rotation, horizontal flip, gaussian
blur, gaussian noise, scaling, and random crop. Out of
which, applying only horizontal flip provided the best
results. Table 2 shows how the size of the datasets
evolved as data was processed.
Table 2: Size of the datasets at each stage of processing.
Name Original Post-processing Post-augmentation
CCD 4,500 3,801 6,841
DoTA 7,677 5,353 9,634
4 METHODOLOGY
4.1 Forecasting Time-to-Accident
The aforementioned datasets, CCD and DoTA have
frame-wise annotations indicating the exact time step
at which the accident begins. We utilize these anno-
tations to generate labels to train our time-to-accident
prediction model. For a given accident clip, we have
M binary labels {label
1
, label
2
, label
3
...label
M
},
where M is the total number of frames in the video.
The binary labels are associated with each frame of a
video and each frame represents 0.1 seconds as there
are 10 fps. The first positive label in this sequence
is the time step where the accident has started or is
inevitable according to the annotations. We denote
the first accident label in this sequence of labels as T,
then our ground truth time-to-accident (TTA) is t =
Learning Spatio-Temporal Features via 3D CNNs to Forecast Time-to-Accident
535
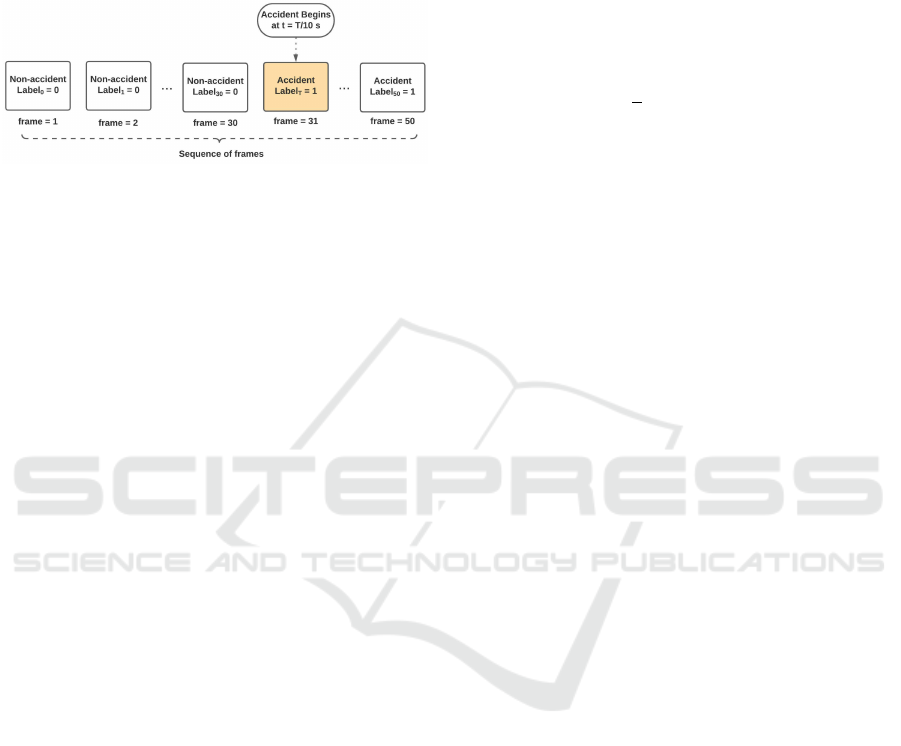
T/10 seconds. Figure 4 depicts a clip from the CCD
dataset and shows how we utilize the annotations to
calculate our TTA value. As a pre-processing step,
we label each accident clip with the ground truth TTA
value and non-accident clips with the value -1. Given
Figure 4: Sample clip from the Car Crash Dataset.
a sequence of N consecutive frames {F
1
, F
2
, F
3
...F
N
},
our goal is to use this sequence as history to estimate
the time-to-accident. If the estimation is less than 0,
we can say that there will be no accidents in the near
future. As we are predicting a continuous variable, we
formulate the problem of TTA as a regression prob-
lem.
4.2 Proposed 3D CNN Architecture
To predict time-to-accident from a sequence of
frames, we require both the spatial and temporal fea-
tures of those frames. A standard 2D-CNN can only
extract the spatial features without considering the
temporal features. Several architectures exist in the
literature for Spatio-temporal feature learning, e.g.,
N-stream VGG (Manglik et al., 2019), CNN-RNN,
CNN-LSTM, 3D-CNN (Tran et al., 2015) etc. Out
of which, only 3D-CNN provides an end-to-end so-
lution for learning from videos. 3D-CNN has also
been shown to outperform its counterparts for various
video-based tasks. However, 3D CNN architectures
are notorious for their large training times, high in-
ference latency, and require significant computational
resources. As our approach requires both high perfor-
mance and efficiency for real-time usage, we perform
rigorous experiments to come up with the parameters
for a 3D CNN architecture for our application that is
efficient and does not compromise on performance.
For example, our proposed architecture has about 1.8
million parameters for image sizes of 72x128 and
temporal depth of 4 whereas C3D has over 128 mil-
lion parameters. Our experiments show that even with
significantly fewer parameters our architecture out-
performs C3D. As shown in figure 5, our 3D CNN ar-
chitecture has 6 3D convolution layers, 3 max-pooling
layers, and 1 fully connected layer. We conducted ex-
periments with varying kernel dimensions and found
the convolution kernel size of 3x3x3 to perform best,
this aligns with the findings of the systemic study
(Tran et al., 2015) on 3D CNN architectures. For
the pooling kernels, a dimension of 3x3x3 performed
best for our application. We use dropouts at regular
intervals to prevent over-fitting and batch normaliza-
tion before feeding to the output layer. Relu is used as
the activation function for all layers except the output
layer where a linear activation function is used. Our
network is trained with the following loss function.
Loss
mse
=
1
2
||t
gt
− f (l
1
, l
2
, ..., l
N
)||
2
(1)
The Loss
mse
is the mean squared loss between
our ground truth time t
gt
and predicted time
f (l
1
, l
2
, ..., l
N
). The loss is optimized using the Adam
optimizer, with a batch size of 64 and an initial learn-
ing rate of 0.001. We run our experiments for 200
epochs and use two callbacks, early stopping, and a
learning rate scheduler. Early stopping prevents over-
fitting by halting training when validation loss stops
improving for 40 epochs. The learning rate scheduler
reduces the learning rate by a factor of 0.20 if the val-
idation loss does not improve for 10 epochs. As dis-
cussed in the previous section, we increase our train-
ing data by two folds through horizontal flip transfor-
mation.
5 EXPERIMENTS & RESULTS
Our objective is to determine if the Spatio-temporal
information from the first N frames can be used as
a history to forecast the TTA and recognize an acci-
dent scene. We use a maximum of 10 frames to make
our approach suitable for real-world scenarios. Given
the prediction horizon is between 30 to 60 frames, us-
ing more than 10 frames would not allow the driver
enough time to take action to prevent the accident.
In addition to varying the temporal depth, we resize
the frames to two different resolutions, 36x64 and
72x128. This was motivated by studies such as (Gau-
rav et al., 2021) which showed both temporal depth
and spatial resolution can impact the performance of
3D CNNs for video-based tasks such as scene recog-
nition. All experiments in this section were con-
ducted on a system with 11th Generation Intel Core
i7-11800H, 32GB RAM, and Nvidia GeForce RTX
3080 GPU with 16GB memory. The images and la-
bels were normalized before being fed into the net-
works.
We compare our proposed architecture directly to
C3D due to their similar characteristics. Our im-
plementation of the C3D architecture is identical to
the original paper, no fine-tuning was performed as
the authors claim their architecture can perform well
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
536
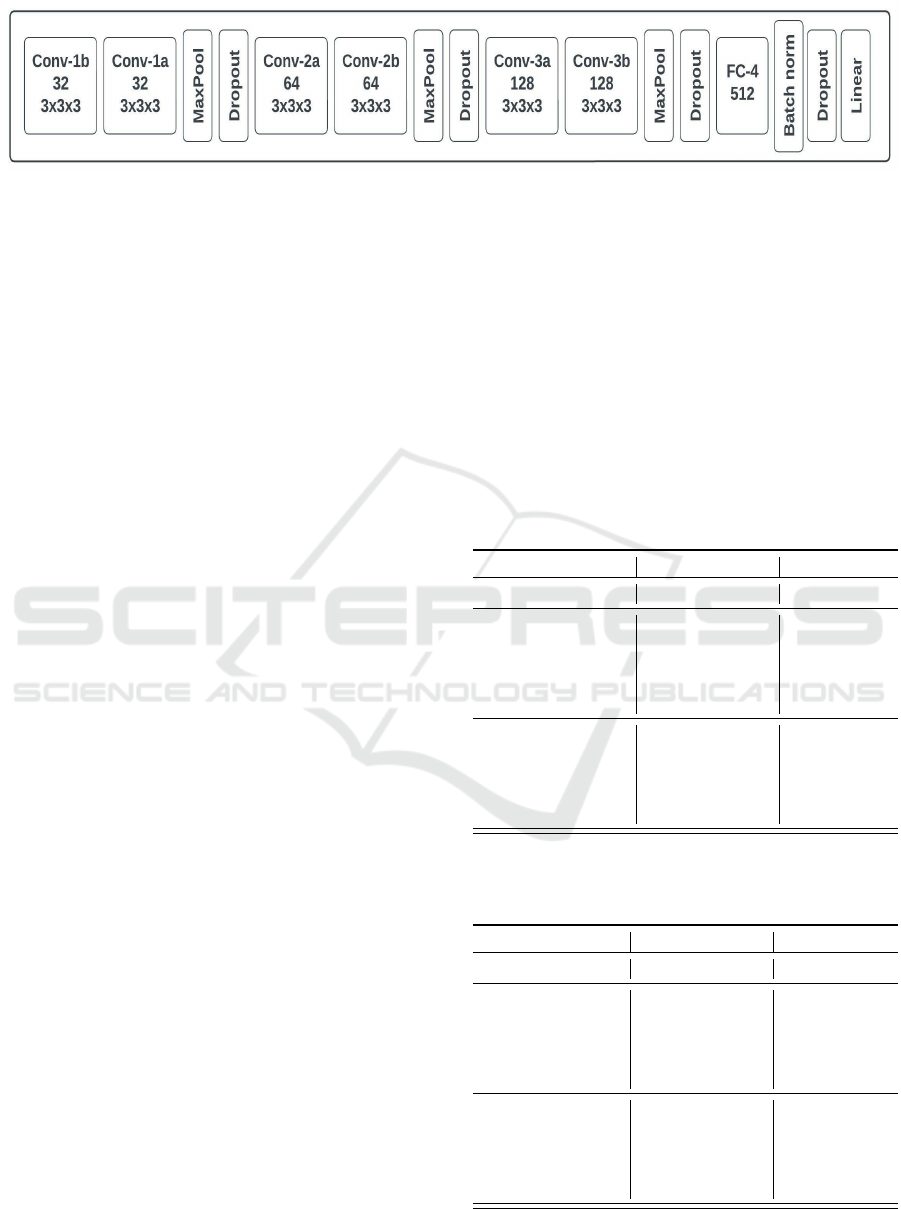
Figure 5: Proposed 3D CNN Architecture, ”32” refers to the number of filters while ”3x3x3” refers to the kernel dimensions.
without fine-tuning regardless of the application. For
C3D, the experiments were trained for 250 epochs
with a batch size of 64, an initial learning rate of
0.001, MSE as the loss function, and a Stochastic gra-
dient descent optimizer. Additionally, two callbacks
were used, namely, Early stopping and Learning rate
scheduler.
Table 3 and figure and 4 show our experimental
results on the datasets CCD and DoTA respectively.
The reported results show the Root Mean Squared Er-
ror (RMSE) and Mean Absolute Error (MAE) over
an average of 5 runs. Both the models were trained
from scratch and no pre-trained weights were used.
For C3D, only using 2-6 frames produce poor results
compared to our architecture across both datasets.
Along with temporal depth, the spatial resolution also
influenced performance. In table 3, we can notice
an improvement in RMSE and MAE for both archi-
tectures as the resolution is increased from 36x64 to
72x128. A similar trend can be noticed for DoTA in
table 4, however, the improvement is less significant.
This may be because the videos in CCD are of low
quality compared to DoTA. Hence, reducing the res-
olution further causes more loss of spatial informa-
tion for CCD compared to DoTA. We also notice that
both the RMSE and MAE are significantly higher for
DoTA which is since DoTA has significantly longer
videos with the longest video beings 18.4 seconds
long. DoTA also has a higher average prediction hori-
zon of 6 seconds compared to 3.4 seconds for CCD.
For some of the experiments, our proposed model
performs very similarly to C3D, however, it is im-
portant to note that our model is significantly faster
and requires much less computational resources com-
pared to C3D. We also note that there isn’t a piece-
wise monotonic relation between temporal depth and
mean absolute error. Our findings align with the stud-
ies (Manglik et al., 2019; Kayukawa et al., 2019)
where they conclude that length of temporal history
does not necessarily increase or decrease error in pre-
diction for applications such as trajectory prediction
or robot-pedestrian collision. An interesting observa-
tion was that our best model predicted positive TTA
value for all accident videos and negative values all
for non-accident videos. This means the model was
able to recognize accident and non-accident scenes
with 100% accuracy. To compare the results, we per-
formed separate experiments for binary accident clas-
sification using the C3D architecture and categorical
cross-entropy loss function. For the same temporal
depth and spatial resolution, the classification accu-
racy was 91% for DoTA and 93% for CCD. This sug-
gests that our approach is not only an effective method
for TTA estimation but can also be used as an effec-
tive accident classification strategy.
Table 3: Results in seconds on CCD with varying Spatial
Resolution and Temporal Depth.
OURS OURS C3D C3D
Resolution Frames RMSE MAE RMSE MAE
36x64 2 0.906 0.386 1.229 0.802
36x64 4 0.872 0.319 1.215 0.769
36x64 6 0.885 0.325 1.060 0.614
36x64 8 0.900 0.334 0.902 0.333
36x64 10 0.915 0.337 0.941 0.353
72x128 2 0.858 0.369 1.130 0.703
72x128 4 0.842 0.312 1.127 0.676
72x128 6 0.871 0.340 0.952 0.347
72x128 8 0.822 0.315 0.926 0.338
72x128 10 0.819 0.300 0.990 0.365
Table 4: Results in seconds on DoTA with varying Spatial
Resolution and Temporal Depth.
OURS OURS C3D C3D
Resolution Frames RMSE MAE RMSE MAE
36x64 2 1.545 0.969 2.081 1.610
36x64 4 1.521 0.886 2.047 1.560
36x64 6 1.505 0.831 2.193 1.515
36x64 8 1.496 0.809 1.479 0.811
36x64 10 1.498 0.821 1.467 0.801
72x128 2 1.535 0.879 2.138 1.660
72x128 4 1.510 0.802 2.003 1.413
72x128 6 1.517 0.819 1.903 1.262
72x128 8 1.457 0.786 1.473 0.800
72x128 10 1.490 0.822 1.514 0.834
Learning Spatio-Temporal Features via 3D CNNs to Forecast Time-to-Accident
537

5.1 Comparative Analysis
We perform comprehensive experiments against
state-of-the-art CNN architectures proposed for simi-
lar applications to examine the robustness of our pro-
posed method. For a fair comparison, we train and
fine-tune the CNN architectures on CCD and DoTA.
1) 2D CNN Architectures: We compare our work
against two types of 2D CNN architectures, namely,
VGG and ResNet. The work by (Manglik et al., 2019)
proposes a multi-stream VGG-16 for robot-pedestrian
near collision scenarios. Their model extracts spatial
features from N-frames, concatenates them to learn
the motion information, and feeds them to a fully con-
nected layer before being fed to the output layer. As
the authors found 6 frames to perform the best, we
compare our model against 6-Stream VGG-16. The
model was initialized with pre-trained weights from
ImageNet similar to the original work. The authors
fine-tuned the model on PASCAL VOC as ImageNet
does not have a person class. However, as our ap-
plication is based on traffic accidents and ImageNet
contains a vehicle class we skipped the fine-tuning
step. Similar to the original work, We used 224x224
RGB images, SGD as the optimizer, and MSE as the
loss function. A learning rate of 0.001 and the model
was trained for 50 epochs as these parameters per-
formed the best. Additionally, we also implement
a single frame VGG-16 as a baseline model to gain
some insight into the influence of only spatial fea-
tures vs Spatio-temporal features. The results in ta-
bles 5 and 6 show that 6 frames perform better than
1 frame. This indicates leveraging Spatio-temporal
features can provide better performance compared to
only using spatial features. However, the standard de-
viation of residuals (i.e., RMSE) was lower for the
single image variant, this may be due to the lower
complexity of the model. Our proposed architecture
outperforms both VGG variants by a substantial mar-
gin.
To diversify our list of 2D architectures we imple-
ment a ResNet-8 model proposed for collision avoid-
ance in drones (Loquercio et al., 2018). In the orig-
inal work, the model is fed a single image and gen-
erates a steering angle and a collision probability to
recognize and avoid collisions. In our implementa-
tion, we replaced the two output layers with a single
regression layer that produces the time-to-accident
estimation. Similar to the original work, 224x224
greyscale images were used with an initial learning
rate of 0.0001, with MSE as the loss function and
Adam as the optimizer. Our proposed model outper-
formed the ResNet-8 model as shown in tables 7 and
8 however, additionally, it performed better than both
VGG variants.
2) Video Architectures: A combination of CNN
with an RNN variant is typically used for video clas-
sification apart from 3D-CNNs due to their compu-
tational efficiency. RNN models have different vari-
ations such as Long Short-Term Memory (LSTM),
Gated Recurrent Unit (GRU), Initialized RNNs and
Convolutional LSTM. For our purpose, we use a
GRU-based RNN, GRU was considered over LSTM
because it controls the flow of the information, does
not require a memory unit, and is better in terms of
computational efficiency and performance (Bahmei
et al., 2022). For the spatial features, we used an
Inception V3 model pre-trained on ImageNet to ex-
tract the features from our traffic accident datasets.
The features are then fed to a sequence model with
two Gated Recurrent Unit layers (GRU) with 16 and 8
neurons respectively followed by a dropout layer and
a fully connected layer with 8 neurons, finally all the
features are fed to the output layer with a linear ac-
tivation function. RNN-CNN model performed best
with 16 frames and gave the best results after the 3D
CNN architectures.
Table 5: TTA estimation on CCD: Comparison of our work
with single frame VGG-16, multi-stream stream VGG-16
(Manglik et al., 2019), ResNet-8 (Loquercio et al., 2018),
CNN-RNN and C3D (Tran et al., 2015).
Method RMSE (s) MAE (s)
VGG-16 (1 frame) 1.279 0.882
VGG-16 (6 frames) 1.456 0.750
ResNet-8 (1 frame) 1.029 0.637
CNN-RNN (16 frames) 1.078 0.388
C3D (8 frames) 0.902 0.333
OURS (10 frames) 0.819 0.300
Table 6: TTA estimation on DoTA: Comparison with single
frame VGG-16, N-stream VGG-16 (Manglik et al., 2019),
ResNet-8 (Loquercio et al., 2018), CNN-RNN and C3D
(Tran et al., 2015).
Method RMSE (s) MAE (s)
VGG-16 (1 frame) 1.62 1.46
VGG-16 (6 frames) 1.33 1.35
ResNet-8 (1 frame) 1.64 1.01
CNN-RNN (16 frames) 1.51 0.95
C3D (8 frames) 1.47 0.80
OURS (8 frames) 1.46 0.79
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
538

6 CONCLUSION & FUTURE
WORK
We propose a novel approach to forecast time-to-
accident (TTA) by leveraging Spatio-temporal fea-
tures extracted from traffic accident videos. Our ap-
proach uses inexpensive and easy-to-install dashboard
cameras as opposed to expensive depth imaging de-
vices or sensors that require experts for installation.
This can allow for easy integration with any vehicle
and can be used as a collision avoidance tool. Our
approach only uses the first N-frames where N is at
most 10 (1 second), this allows the driver enough time
to take action to mitigate the risks given the predic-
tion horizon is between 3-6 seconds. Additionally, we
present an efficient 3D CNN architecture with signif-
icantly fewer parameters compared to state-of-the-art
3D CNN architectures (e.g., C3D) without compro-
mising performance. This can enable our approach
to be implemented in real-time scenarios where min-
imum inference latency, low computational cost, and
high accuracy are necessary. Comparing the results
of our multi-frame experiments against the single-
frame experiments there is clear evidence that Spatio-
temporal features perform better as opposed to using
only spatial features. Apart from estimating TTA, our
model can also recognize accident and non-accident
scenes with 100% accuracy. This can be beneficial for
avoiding false alarms in real-time applications. We
also notice that there is no clear monotonic relation-
ship between temporal depth and prediction error, our
findings align with other studies in the literature as
mentioned in the previous section. Apart from the
temporal depth our experiments suggest that spatial
resolution impacts the predicted outcome. As a part
of future work, we will work on the interpretability
of our model to analyze the features that impact the
prediction error. We also plan to integrate our model
with an accident localization framework to detect var-
ious road users that pose a collision threat. Further-
more, we will implement our approach in real-world
scenarios and assess the feasibility of our solution in
real-time.
REFERENCES
Bahmei, B., Birmingham, E., and Arzanpour, S. (2022).
Cnn-rnn and data augmentation using deep convolu-
tional generative adversarial network for environmen-
tal sound classification. IEEE Signal Processing Let-
ters, 29:682–686.
Bao, W., Yu, Q., and Kong, Y. (2020). Uncertainty-based
traffic accident anticipation with spatio-temporal rela-
tional learning. In Proceedings of the 28th ACM In-
ternational Conference on Multimedia, pages 2682–
2690.
Bewley, A., Ge, Z., Ott, L., Ramos, F., and Upcroft, B.
(2016). Simple online and realtime tracking. CoRR,
abs/1602.00763.
Chan, F.-H., Chen, Y.-T., Xiang, Y., and Sun, M. (2016).
Anticipating accidents in dashcam videos. In Asian
Conference on Computer Vision, pages 136–153.
Springer.
Gaurav, R., Tripp, B., and Narayan, A. (2021). Driving
scene understanding: How much temporal context and
spatial resolution is necessary? In Canadian Confer-
ence on AI.
Hayward, J. C. (1972). Near miss determination through
use of a scale of danger.
Jim
´
enez, F., Naranjo, J. E., and Garc
´
ıa, F. (2013). An
improved method to calculate the time-to-collision
of two vehicles. International Journal of Intelligent
Transportation Systems Research, 11(1):34–42.
Kayukawa, S., Higuchi, K., Guerreiro, J., Morishima, S.,
Sato, Y., Kitani, K., and Asakawa, C. (2019). Bbeep:
A sonic collision avoidance system for blind travellers
and nearby pedestrians. In Proceedings of the 2019
CHI Conference on Human Factors in Computing Sys-
tems, pages 1–12.
Loquercio, A., Maqueda, A. I., Del-Blanco, C. R., and
Scaramuzza, D. (2018). Dronet: Learning to fly
by driving. IEEE Robotics and Automation Letters,
3(2):1088–1095.
Manglik, A., Weng, X., Ohn-Bar, E., and Kitanil, K. M.
(2019). Forecasting time-to-collision from monoc-
ular video: Feasibility, dataset, and challenges. In
2019 IEEE/RSJ International Conference on Intelli-
gent Robots and Systems (IROS), pages 8081–8088.
IEEE.
Saffarzadeh, M., Nadimi, N., Naseralavi, S., and Mam-
doohi, A. R. (2013). A general formulation for time-
to-collision safety indicator. In Proceedings of the
Institution of Civil Engineers-Transport, volume 166,
pages 294–304. Thomas Telford Ltd.
Sharma, S., Ansari, J. A., Murthy, J. K., and Krishna, K. M.
(2018). Beyond pixels: Leveraging geometry and
shape cues for online multi-object tracking. CoRR,
abs/1802.09298.
Suzuki, T., Kataoka, H., Aoki, Y., and Satoh, Y. (2018).
Anticipating traffic accidents with adaptive loss and
large-scale incident db. In Proceedings of the IEEE
conference on computer vision and pattern recogni-
tion, pages 3521–3529.
The Insurance Institute, H. S. (2022). Real-world benefits
of crash avoidance technologies.
Tøttrup, D., Skovgaard, S. L., Sejersen, J. l. F., and Pi-
mentel de Figueiredo, R. (2022). A real-time method
for time-to-collision estimation from aerial images.
Journal of Imaging, 8(3):62.
Tran, D., Bourdev, L., Fergus, R., Torresani, L., and Paluri,
M. (2015). Learning spatiotemporal features with 3d
convolutional networks. In Proceedings of the IEEE
international conference on computer vision, pages
4489–4497.
Learning Spatio-Temporal Features via 3D CNNs to Forecast Time-to-Accident
539

Wardlaw, C. (2020). Driver assists: What are the costs to
buy, insure and repair?
World Health Organization, W. (2018). Global status report
on road safety.
Yao, Y., Wang, X., Xu, M., Pu, Z., Wang, Y., Atkins, E., and
Crandall, D. (2022). Dota: unsupervised detection of
traffic anomaly in driving videos. IEEE transactions
on pattern analysis and machine intelligence.
Yao, Y., Xu, M., Wang, Y., Crandall, D. J., and Atkins,
E. M. (2019). Unsupervised traffic accident detection
in first-person videos. In 2019 IEEE/RSJ International
Conference on Intelligent Robots and Systems (IROS),
pages 273–280. IEEE.
Yu, F., Chen, H., Wang, X., Xian, W., Chen, Y., Liu, F.,
Madhavan, V., and Darrell, T. (2020). Bdd100k: A
diverse driving dataset for heterogeneous multitask
learning. In Proceedings of the IEEE/CVF conference
on computer vision and pattern recognition, pages
2636–2645.
Yue-Hei Ng, J., Hausknecht, M., Vijayanarasimhan, S.,
Vinyals, O., Monga, R., and Toderici, G. (2015). Be-
yond short snippets: Deep networks for video classi-
fication. In Proceedings of the IEEE conference on
computer vision and pattern recognition, pages 4694–
4702.
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
540
