
Neural Architecture Search in the Context of Deep Multi-Task Learning
Guilherme Gadelha
1 a
, Herman Gomes
1 b
and Leonardo Batista
2 c
1
Federal University of Campina Grande, Brazil
2
Federal University of Paraiba, Brazil
Keywords:
Multi-Task Learning, Neural Architectural Search, Reinforcement Learning, Deep Learning.
Abstract:
Multi-Task Learning (MTL) is a neural network design paradigm that aims to improve generalization while
simultaneously solving multiple tasks. It has obtained success in many application areas such as Natural
Language Processing and Computer Vision. In an MTL neural network, there are shared task branches and
task-specific branches. However, automatically deciding on the best locations and sizes of those branches as a
result of the domain tasks remains an open question. With the aim of shedding light to the above question, we
designed a sequence of experiments involving single-task networks, multi-task networks, and networks created
with a neural architecture search (NAS) strategy. In addition, we proposed a competitive neural network
architecture for a challenging use case: the ICAO photograph conformance checking for issuing of passports.
We obtained the best results using a handcrafted MTL network, whose effectiveness is close to state-of-the-art
methods. Furthermore, our experiments and analysis pave the way to develop a technique to automatically
create branches and group similar tasks into an MTL network.
1 INTRODUCTION
Single-Task Learning (STL) is a traditional learning
paradigm in which a neural network is defined and
meticulously tuned for solving a specific task (Caru-
ana, 1997). However, manually finding and tuning a
neural network is time-consuming, and early research
indicated that performance might increase if some
tasks were solved together (Caruana, 1997), giv-
ing rise to the so-called Multi-Task Learning (MTL)
paradigm. MTL networks present a lower memory
footprint and higher inference speeds, when com-
pared to equivalent solutions based on STL (Vanden-
hende et al., 2021). Recent reviews (Ruder, 2017;
Zhang and Yang, 2021; Vandenhende et al., 2021)
have identified different strategies for designing these
networks in a partial or fully automatic way.
MTL is a general learning paradigm that aims
to improve the generalization performance of related
tasks compared to the results achieved in isolation
(STL) (Caruana, 1997). In MTL, the tasks are learned
in parallel and share common representations, and
may operate as regularizers for one another (Vanden-
hende et al., 2021).
There is also an increasing interest on Neural Ar-
a
https://orcid.org/0000-0002-1426-2090
b
https://orcid.org/0000-0002-0208-2041
c
https://orcid.org/0000-0002-1069-3002
chitecture Search (NAS) applied to MTL. NAS fo-
cuses on automatic techniques for neural architecture
design, where layers or blocks are searched and ar-
ranged in different ways within the network architec-
ture. Candidate architectures are tested against a vali-
dation dataset until convergence, when the best archi-
tecture is selected. There are some strategies to ex-
plore the architecture search space, such as Random
Search, Bayesian Optimization, Evolutionary Meth-
ods, Reinforcement Learning (RL), and Gradient-
based Methods (Elsken et al., 2019). Random Search
is usually applied as a baseline to evaluate the pro-
posed strategies, as we also do in this research. NAS
methods based on RL (Zoph and Le, 2017; Pham
et al., 2018) were responsible for the popularization
of the field.
In this paper we evaluate handcrafted Single-Task
Learning and Multi-Task Learning architectures, as
well as architectures discovered through NAS for a
challenging problem: the International Civil Avia-
tion Organization (ICAO) photographic compliance
checking. Each approach has been evaluated in terms
of Equal Error Rate (EER). The objective of the ex-
periments is to give insights for partial or fully auto-
mated design of network architectures.
The ICAO ISO/IEC 19795-4 specification (ICAO,
2015) defines the main components of biometric iden-
tification systems. In particular, for facial identifica-
684
Gadelha, G., Gomes, H. and Batista, L.
Neural Architecture Search in the Context of Deep Multi-Task Learning.
DOI: 10.5220/0011696200003417
In Proceedings of the 18th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2023) - Volume 5: VISAPP, pages
684-691
ISBN: 978-989-758-634-7; ISSN: 2184-4321
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
tion, the ISO/IEC 19794-5 (ISO, 2017) standard pro-
poses best practices for face photographs, including
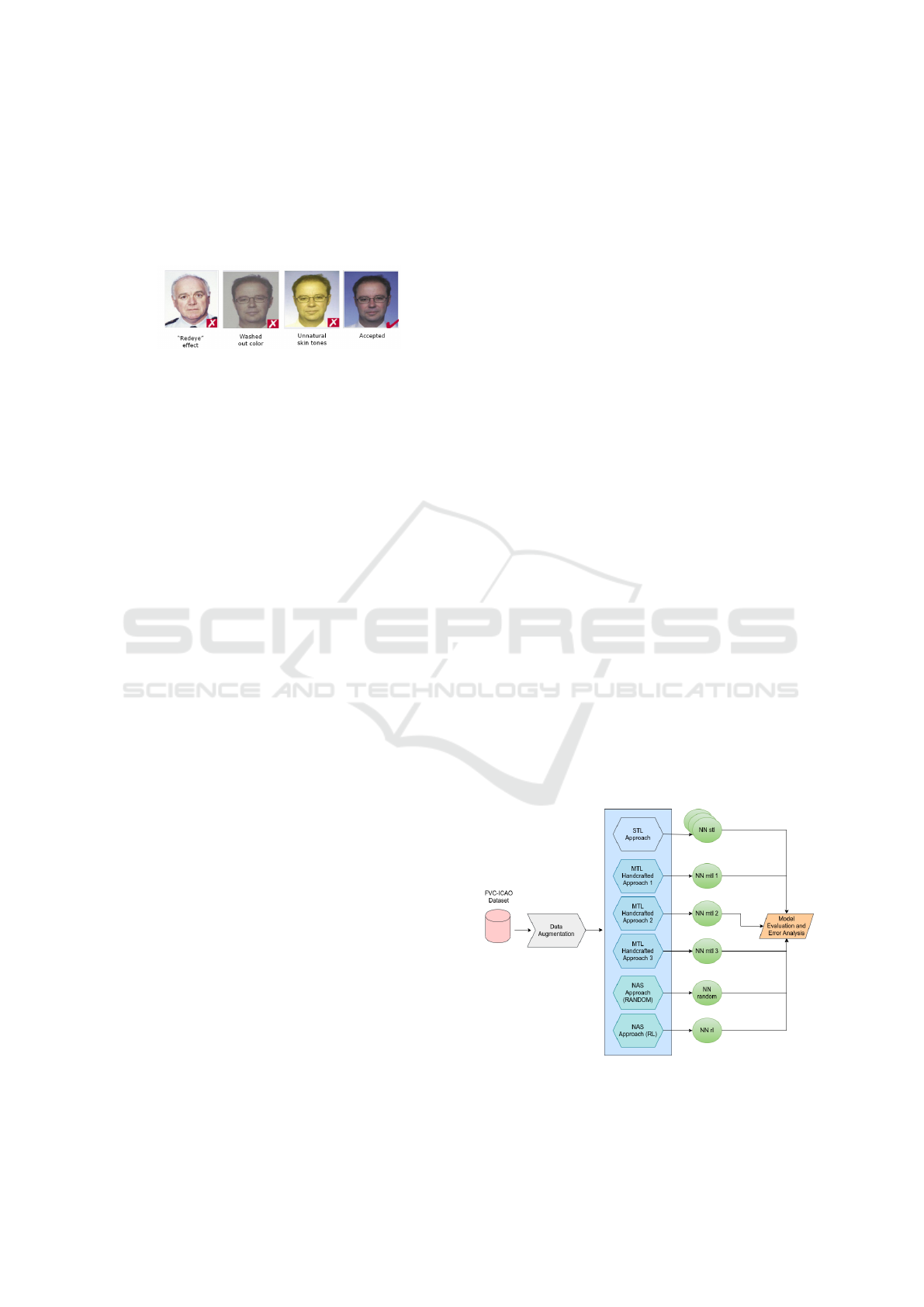
23 compliance requisites. Figure 1 contains some ex-
amples of facial images with issues (the three images
on the left) and one example that complies (the last
image on the right) with some of the ICAO requisites.
Figure 1: Examples of images not complaint and complaint
with some ICAO requisites.
The main contributions of this work are (i) the
proposition of a new NAS-MTL technique, (ii) a com-
parative study between handcrafted STL, handcrafted
MTL, and NAS, and (iii) obtaining a competitive re-
sult in the FVC-ICAO dataset. The proposed tech-
nique that yielded the best results so far has a low
computational cost and a simple implementation.
The remainder of this paper is structured as fol-
lows. Section 2 discusses related work on MTL and
NAS. Sections 3 and 4 contain the experimental eval-
uations and discussion. Finally, Section 5 summarizes
the results and future works.
2 RELATED WORK
MTL techniques may be divided into two categories:
Soft-Parameter Sharing and Hard-Parameter Sharing
(Vandenhende et al., 2021). In Hard-Parameter Shar-
ing, a shared encoder branch is subdivided into task-
specific branches that specialize in solving a single
task. In Soft-Parameter Sharing, there is an algorithm
to find where to share or branch within the network
automatically and the task branches intersect at mul-
tiple points. In this work, we focus on hard-parameter
sharing methods as they produce memory and com-
putation efficient MTL networks (Zhang et al., 2022).
Some hard-parameter sharing MTL branches from
a backbone model (Suteu and Guo, 2019; Leang et al.,
2020) and from a single point in the network, simi-
larly as we do in this research. A recent work (Zhang
et al., 2022) proposes a tree-structured multi-task
model recommender, which respects a user-defined
computation budget. Previous works are based on
task-relatedness calculation (Lu et al., 2017; Van-
denhende et al., 2019) while other works, such as
AdaShare (Sun et al., 2019) and AutoMTL (Zhang
et al., 2022), learn a task-specific policy to select the
layers that should be executed for a given task during
the MTL network training.
Based on the successful results achieved by Zoph
and Le (Zoph and Le, 2017) in NAS, the Efficient
Neural Architecture Search (ENAS) (Pham et al.,
2018) strategy applies the one-shot model strategy
(Elsken et al., 2019). Similarly, Differentiable Ar-
chitecture Search (DARTS) (Liu et al., 2018b) uses a
one-shot model strategy, but performs the search us-
ing gradient descent algorithms. Other works such
as (Xie et al., 2019) also uses RL, but the feedback
mechanism is changed from fixed rewards, such as
validation accuracy, to a generic loss calculated dur-
ing training. Finally, (Liu et al., 2018a) used sequen-
tial model-based optimization (SMBO) to search.
3 MATERIALS AND METHODS
In this section, we present the methodology, dataset,
evaluation metrics, architecture of each approach, and
the idea behind them.
3.1 Methodology
Figure 2 summarizes the methodology. We used
FVC-ICAO dataset with data augmentation (ex-
plained later), and experimented with five differ-
ent network designs from distinct paradigms: Hand-
crafted STL, Handcrafted MTL and NAS. We started
with STL as a baseline, and then investigated MTL
with different setups and network designs. Finally,
inspired by works found in the literature (Zoph et al.,
2018; Pham et al., 2018), we proposed and evalu-
ated a NAS approach. First, we designed a random
approach for baseline purposes, and next, we imple-
mented the Reinforcement Learning approach. The
following sections provide more details.
Figure 2: Scheme of the method, specifying the dataset and
each approach proposed, which are evaluated with common
metrics (accuracy and EER).
Neural Architecture Search in the Context of Deep Multi-Task Learning
685
3.2 FVC-ICAO Dataset
The FVC-Ongoing competition (Ferrara et al., 2022)
built the FVC-ICAO dataset as a reference for requi-
sites compliance checking (Ferrara et al., 2012). Also,
we included other ad-hoc images for increasing the
number of available samples by ICAO requisite. The
dataset was partitioned for training, validation and test
(75%-15%-10%). The dataset has 5,865 images in to-
tal. We performed the following data augmentation
for the FVC-ICAO dataset: horizontal flips, rotations,
scale changes and intensity shear. All scripts and aux-
iliary material are available on a GitHub repository
1
.
We used Tensorflow and Keras frameworks for train-
ing and for data augmentation.
3.3 Metrics
In this study, we computed the accuracy, which is de-
fined by the Equation 1, where TP, TN, FP, and FN
are the number of true positives, true negatives, false
positives, and false negatives, respectively (Guido,
2017). We also used EER, a common metric for eval-
uating biometric systems performance, which is the
error rate at a specific threshold t in which False Non-
Match Rate (FNMR) and False Match Rate (FMR)
are equal (Maltoni et al., 2009).
ACC =
T P + T N
T P + T N + FP + FN
(1)
3.4 Architectural Setups
3.4.1 Single-Task Learning
Initially, we made experiments with STL, where each
task was an ICAO requisite. Our STL method uses
the same single-task architecture for all 23 tasks sep-
arately and employs transfer learning. Different base
models were considered: VGG16 (Simonyan and Zis-
serman, 2015), VGG19 (Simonyan and Zisserman,
2015), MobileNetV2 (Sandler et al., 2018), Inception-
V3 (Szegedy et al., 2016) and ResNet50-V2 (He et al.,
2016). The best base model in our tests was VGG16.
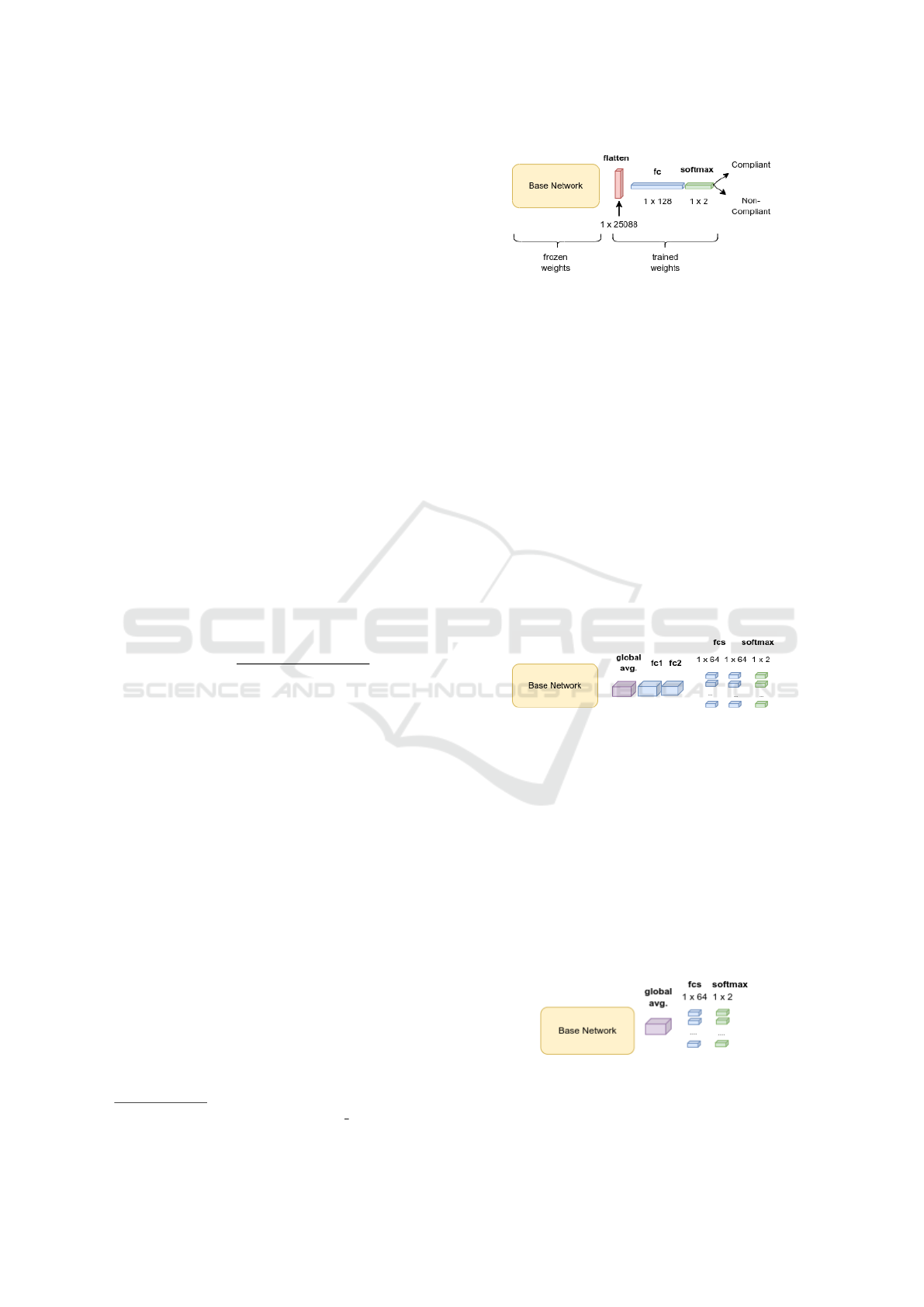
We have frozen the base model weights, as illustrated
in Figure 3, and trained just the dense layers and the
classification layer, so the new tasks could be learned.
Each single-task network specializes in determining if
an input image is compliant or non-compliant with a
specific ICAO requisite. The experiments and results
are discussed in Section 4.
1
https://github.com/guilhermemg/nas v1
Figure 3: Single-Task Network architecture using Transfer
Learning technique. In red is the flatten layer, in blue the
fully-connected layer, and in green the softmax activation.
3.4.2 Multi-Task Learning
Next, we discuss each MTL architecture proposed.
Architecture HANDCRAFTED 1. The first MTL
architecture tested was similar to the one used in
the STL experiments. We used VGG16 as the base
model, removing the original network output layer
and freezing the trained weights. Also, new layers
and an output layer were added, with 23 branches cor-
responding to each ICAO task. Figure 4 shows the
general schema. A fully connected (FC) layer with
64 neurons followed by a FC layer with two neurons
corresponding to the outputs of each task, compose
each branch of the network. The activation function
used in the output layer was softmax.
Figure 4: Multi-Task Learning Handcrafted 1 architecture.
In purple is the global average pooling layer, in blue the
fully-connected layers, and in green the softmax layer.
Architecture HANDCRAFTED 2. Figure 5
presents the network. We maintained the general
schema from architecture Handcrafted 1, but removed
the shared branch and made all tasks branches linked
directly to the Global Average Pooling layer. Also,
we kept just one FC layer (1 x 64) for each task
branch to test the learning potential of each branch
with the minimum of FC layers possible. The number
of FC layers is key for our research and is explained
in more detail in Subsection 3.4.3 and in Section 4.
Figure 5: Multi-Task Learning Handcrafted 2 architecture.
In purple is the global average pooling layer, in blue the
fully-connected layer, and in green the softmax activation.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
686
Architecture HANDCRAFTED 3. Next, we
grouped some ICAO requisites into common task
branches with shared weights, testing the hypothesis
that distinct tasks may benefit each other and increase
the total gain while the network solves some tasks
jointly. The ICAO tasks were hand-picked and
grouped based on human discretion by analyzing
their general characteristics, assuming they may
share common features that the network could use to
solve them with more efficacy. For example, if the
network should analyze the face bottom half region
for some tasks, then they should be in the same group.
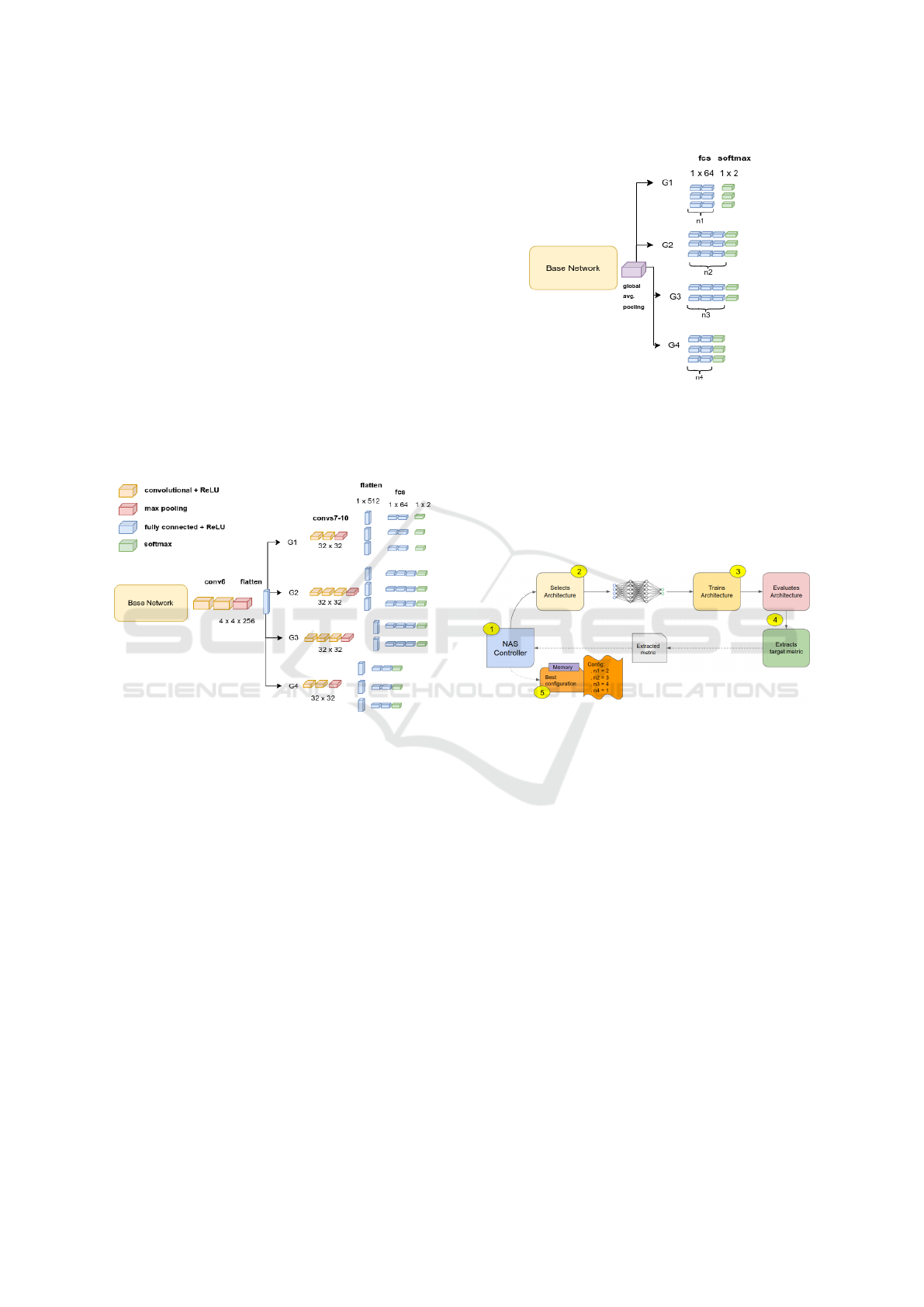
Figure 6 shows the proposed architecture. We also
experimented increasing the number of FC layers per
task branch. Thus, all 23 tasks branches have more
FC layers than in the first and second studied MTL
architectures, but the number of FC layers is fixed for
each branch.
Figure 6: Multi-Task Learning Handcrafted 3 architecture.
3.4.3 Neural Architecture Search
In order to reduce the search space and make the
NAS experiments treatable, considering the resources
available (just a single GPU), we restricted the prob-
lem to searching for the number of FC layers in each
branch. Figure 7 shows the generic architecture on
which the search is based. We maintain the base
model and the general aspect of Handcrafted 3 MTL
architecture. The neural architecture search consists
in finding the values n1, n2, n3, and n4. These four
values, which we call a config, correspond to the four
grouped tasks branches lengths, the sizes of the fully
connected layers. Note Note that task group branches
do not have convolutions and max pooling layers at
this point to simplify the search and the overall im-
plementation
The NAS process is depicted in Figure 8. The con-
troller component (1) first selects a candidate archi-
tecture (2) and trains it in a validation set (3), then this
candidate architecture is evaluated based on a chosen
Figure 7: Neural Architecture Search generic architecture
showing the searched parameters n1,n2,n3 and n4. In pur-
ple is the global average pooling layer, in blue the fully-
connected layer, and in green the softmax activation.
metric like accuracy or EER (4), and finally, the con-
troller stores the result in memory (5). This process
occurs for some iterations (also called trials), and the
architecture with the best result found at the end is
chosen as the search result.
Figure 8: Neural Architecture Search basic process
We tried two base models, MobileNetV2 and
VGG16, whose accuracies were similar. However,
MobiletNetV2 inference time was much lower than
VGG16, so, we selected MobiletNetV2 for all NAS
experiments.
Random Search. We evaluated two different NAS
approaches. The first one was a random search, re-
ferred to as RANDOM. We randomly chose from a
predetermined integer interval (1-5) the config values
and trained the random neural architecture. This in-
terval was designed based on the available resources
and also applies for the second search strategy.
Reinforcement Learning Search. We inspired our
work on ENAS (Efficient Neural Architecture Search)
(Pham et al., 2018). We train one LSTM network
with 32 hidden cells as agent in the RL framework.
The LSTM’s input is the previous network configu-
ration, which is used to propose a new architecture.
The NAS process starts with a random config as the
Neural Architecture Search in the Context of Deep Multi-Task Learning
687

Figure 9: True negative, true positives, and false positive
examples of Veil requisite with Grad-CAM heatmaps
first trial. Following training and evaluation, we cal-
culate the mean accuracy of all tasks and record it in
the NAS Controller memory with the respective con-
fig. Finally, the NAS Controller injects this last config
and the obtained accuracy as achieved reward into the
LSTM network and trains it for m epochs, which pro-
duces a new config of a new child network starting a
new trial. The process repeats for a fixed number N
of trials set in the NAS Controller instantiation. When
the searching process ends, we recreate the best model
architecture found, train it for 50 epochs, and evaluate
it in the test set.
4 EXPERIMENTAL EVALUATION
AND DISCUSSION
Table 1 shows the results obtained in the best resulting
experiments for each approach, as presented next.
4.1 Single-Task Learning
The STL column in Table 1 shows the results ob-
tained for each STL network training with ten epochs.
We decided on ten epochs because the trainings con-
verged with this number of epochs. All networks have
approximately 3.2M trainable parameters from 17.9M
parameters. In general, the results are not competi-
tive. We did not evaluate the requisite Ink Mark in
any experiment, since the random test set selected did
not have instances of this requisite, so we could not
calculate the metrics for it.
Error Analysis. Grad-Cam (Selvaraju et al., 2020)
is a technique developed for aiding the explanation of
CNN-based models decisions through visualizations
produced on top of evaluated images. In Figure 9, the
region that the network is paying attention to when
taking the decision - compliant or not compliant - is
highlighted in green and yellow. In contrast, the re-
gions highlighted in red or violet are those the model
is not paying attention to. For example, we can ob-
serve in Figure 9 that the network is looking for the
region right below the person’s nose when the person
is wearing a veil. This pattern occurs in all true nega-
tive images of Veil requisite.
We also identified other patterns through Grad-
CAM analysis. In the True Positives examples in Fig-
ure 9 the network pays attention to the person’s shirt
and headwear. Despite the network positive assertion
(correctly classifying a compliant image) and high ac-
curacy for this ICAO requisite, this can lead to failures
in generalization.
Figure 9 also shows the single case where the net-
work failed to identify that the person was not wear-
ing a veil. We can check that the case is dubious since
the person has the face partially occluded by the shirt.
The Grad-CAM analysis suggests that a MTL ap-
proach may be successful for the ICAO case: the fact
that the network makes hits in one task while look-
ing into regions of interest of other tasks reinforces
the hypothesis that jointly learning the tasks may be
beneficial.
4.2 Multi-Task Learning
In this section, we discuss the MTL approach results.
Architecture HANDCRAFTED 1. We performed
three experiments with the Handcrafted 1 approach.
In the first one (Exp. I), we trained the network by ten
epochs and observed the evolution of training curves:
accuracy vs. epoch and loss vs. epoch checking the
training convergence. In the second one (Exp. II), we
increased the number of trained epochs to 200 to see if
the final accuracy would be higher with more training
epochs, and again observed the training curves. We
have not used early stopping since we would like to
observe the whole training results towards all epochs.
Lastly (Exp. III), we tried to fine-tune the base model
for ten epochs, froze the base model weights again,
and train the whole model for 200 epochs, so we
could test the effect of base model fine-tuning for
some epochs during training. In all experiments, we
selected the best model based on the epoch with the
highest validation accuracy. Table 1 summarizes the
results.
It is possible to observe significant improvements
through the experiments I to III with most ICAO
requisites ending below 10% EER threshold: Eyes
Closed, Close, Flash Lenses, Light, Veil, Shadow
Head and Hair Eyes, and a group of ICAO tasks that
were even better with a mean EER of less than 2%:
Hat, Dark Glasses, Washed Out, Red Eyes. Compar-
atively to the STL approach, most requisites also had
a better result in this MTL approach.
It is important to mention that the great change
in the EER result for the Frames Heavy case - from
0.88% to 50% - was mainly due to the class unbalanc-
ing: we had just two samples of NOT COMPLAINT
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
688
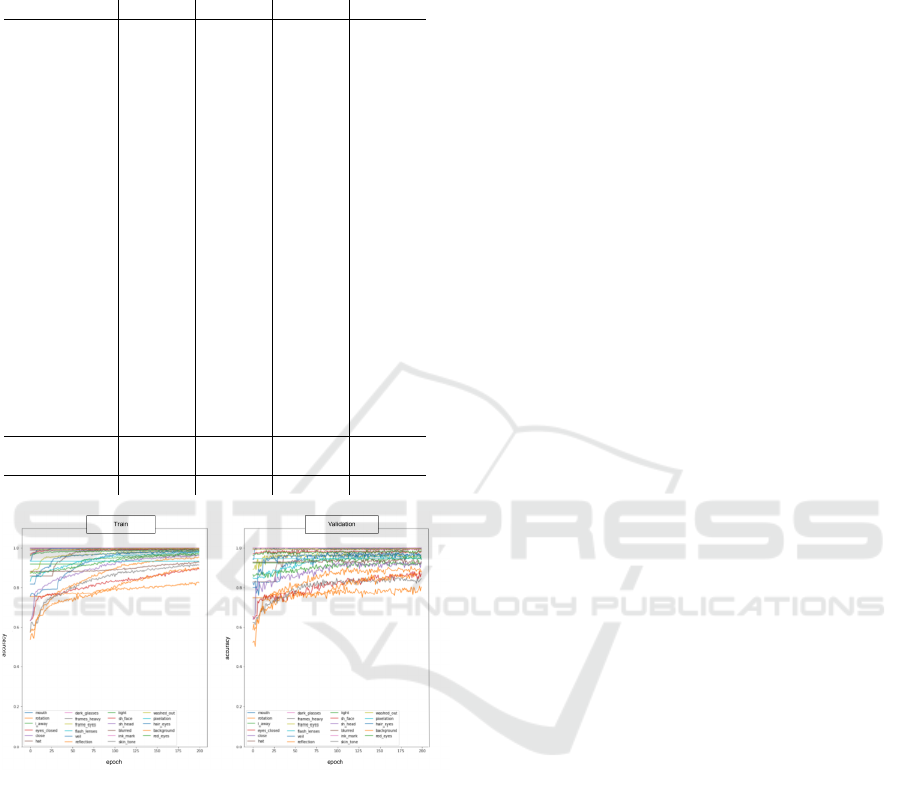
Table 1: Mean EER, EER standard deviation, and Median
EER on test set for STL and MTL best resulting experi-
ments: MTL Handcrafted 1 - Exp. III, MTL Handcrafted 2
- Exp. IV, and MTL Handcrafted 3 - Exp. III.
ICAO Rq. STL MTL 1 MTL 2 MTL 3
Mouth 21.20% 6.0% 5.06% 3.67%
Rotation 27.94% 27.06% 18.27% 18.75%
L. Away 21.04% 11.46% 8.83% 11.96%
Eyes Closed 18.31% 2.04% 1.98% 3.75%
Close 3.32% 7.69% 4.02% 0.00%
Hat 1.40% 0.98% 2.88% 1.61%
Dark Glasses 1.81% 1.62% 0.20% 0.00%
Fr. Heavy 50.00% 50.0% 50.00% 0.00%
Fr. Eyes 15.58% 3.74% 5.08% 4.83%
Flash Lenses 11.76% 4.08% 4.70% 3.86%
Veil 2.38% 2.38% 2.94% 4.82%
Reflection 19.40% 15.32% 13.87% 13.17%
Light 14.63% 9.63% 8.03% 8.22%
Sh. Face 15.18% 17.96% 11.39% 12.13%
Sh. Head 9.18% 8.21% 9.72% 6.16%
Blurred 10.21% 12.39% 11.25% 9.67%
Skin Tone 21.13% 19.39% 16.64% 0.00%
Washed Out 1.06% 0.35% 0.18% 19.10%
Pixel. 31.79% 34.86% 22.99% 0.00%
Hair Eyes 12.94% 2.68% 4.73% 27.39%
Background 7.30% 21.54% 3.87% 4.89%
Red Eyes 14.40% 1.77% 1.98% 10.42%
Mean EER 15.09% 11.87% 9.48% 7.47%
EER sd. 11.54% 12.61% 10.91% 7.32%
Md. EER 14.52% 7.95% 5.07% 4.86%
Figure 10: Training curves of MTL training - Experiment
III - 200 epochs after 50 epochs of fine-tuning.
images (0.69%) for this requisite in a total of 288 test
images. So, in cases like this, a small change in the
output may cause great variations over the final EER.
Consequently, we decided to use the Median EER in
addition to the Mean EER as this statistic is less vul-
nerable to outliers.
Architecture HANDCRAFTED 2. We executed
five experiments for the Handcrafted 2 approach: the
first and second resulted from trainings with 10 and
200 epochs, respectively, similar to Experiments I and
II of the Handcrafted 1 approach.
The last three experiments tested modifications in
data augmentation. In Exp. III, we did no rotations in
the images and changed the range of width and height
shift from 0.2 to 0.1 simultaneously. In Exp. IV and
V, we did no rotations in the images and trained the
network for 50 and 200 epochs, respectively.
The hypothesis tested in these experiments are (i)
the negative effect of rotation for data augmentation,
that could be harming the Rotation (Roll, Pitch, Yaw)
requisite; (ii) we also evaluated the shifting opera-
tion, whose value could be inadequate; (iii) we var-
ied the number of training epochs checking the results
for each requisite and for the general set of requisites.
Table 1 shows the best achieved results in Experiment
IV in terms of Median EER.
We can observe that Exp. IV had the best results in
terms of Median EER (5.07%) compared to the other
ones. The Rotation requisite had slight improvement
and showed the best result so far, confirming the hy-
pothesis that doing rotations in the images during data
augmentation was prejudicial. Other requisites also
presented the lower EER so far: Eyes Closed, Light,
Background, and Red Eyes. Considering that, We
decided not to make any rotations and use the same
width and height shifts during data augmentation for
the subsequent experiments.
Architecture HANDCRAFTED 3. In this last
MTL approach, we did three experiments (I, II, and
III) varying solely on the number of training epochs
(10, 50, and 200, respectively), evaluating the training
convergence and final Mean EER and Median EER.
The results are available in Table 1, relative to Exper-
iment III, which presented the best Median EER.
We can see that the requisites Close, Dark
Glasses, Frames Heavy, Skin Tone, and Pixelation
had 0% EER in the test set. Skin Tone and Pixe-
lation were two difficult tasks, considering the high
EER achieved by the other approaches (above 10%
on average). In the next phases of this research, we
will investigate these results more deeply.
4.3 Neural Architecture Search
In the NAS context, we analyzed different dimensions
in our experiments: the number of epochs (m ∈ [1, 5])
and the number of trials (N ∈ [3, 50]). Table 2 show
the results in the FVC-ICAO dataset for each differ-
ent approach. In this case, we may note a difference
between the proposed REINFORCE approach and the
baseline RANDOM approach. The first one achieved
5.85% EER median as the best result, while the sec-
ond one achieved 6.5% EER median. Curiously, in-
creasing the number of epochs m generally did not
improve the method efficacy in terms of median EER.
Comparatively to MTL, NAS REINFORCE obtained
Neural Architecture Search in the Context of Deep Multi-Task Learning
689

a promising result, which is about just one percentual
point below the 4.86% best MTL result (Handcrafted
Approach 3).
Table 2: Results of Approaches 1 (RANDOM) and 2 (RL)
in FVC-ICAO dataset in terms of EER Mean, EER standard
deviation, and EER Median.
Ap. m N EER Mean EER sd. EER Md
1 1 3 7.86% 7.2% 6.5%
1 1 50 7.72% 5.81% 7.69%
1 5 3 7.67% 6.79% 6.68%
1 5 50 8.55% 7.17% 9.2%
2 1 3 8.83% 7.52% 8.93%
2 1 50 7.73% 7.36% 5.85%
2 5 3 8.14% 6.79% 8.45%
2 5 50 8.31% 6.85% 7.83%
We intend to improve the search space with more
operations - like skip-connections, concat, and splits
- and different types of layers - such as 3x3 and 5x5
convolutions. We expect that by implementing these
extensions to our method, we may achieve better re-
sults on the FVC-ICAO dataset, even surpassing MTL
results and getting closer to the state-of-the-art on this
dataset. Using a search space with these operations al-
lows the proposition of an architecture such as Hand-
crafted MTL 3 by the NAS method.
4.4 Comparison with Literature
A direct comparison of our results with the ones avail-
able on the FVC-Ongoing competition is not yet pos-
sible, since we still need to make adjustments to the
executable code of our model to meet the compe-
tition requirements in terms of size and execution
time. However, considering two caveats (i) that FVC-
Ongoing test set is different than ours and (ii) we
could not evaluate the requisite Ink Mark, we de-
cided to assess our method performance compared
with some top solutions submitted to the competition
platform. Note that we considered only solutions that
evaluate all 23 ICAO requisites, so we can make a
more fair comparison with our model. Table 3 shows
the results of BioLab (Ferrara et al., 2012), BioTest
(BioTest, 2017), and Biopass Face (Vsoft, 2017).
Table 3: EER of submitted solutions to FVC-Ongoing com-
petition by independent developers, private companies, and
academic institutions. Note, the platform uses its own test
set, different of ours.
BioLab BioTest Biopass Face
Mean EER 7.28% 9.89% 4.84%
EER std dev. 5.90% 9.05% 4.18%
Median EER 5.20% 5.10% 3.10%
Considering median and mean EER as reference
metrics, our solution had competitive results. It is
relevant to highlight that these competitors may have
implemented solutions specifically designed for each
one of these requisites. For example, an SVM for
Dark Glasses, simple filters for Pixelation and Blur,
neural networks for Veil, etc. In our solution, all the
requisites are analyzed in a single neural network si-
multaneously.
In the future, we will also submit our model to the
FVC-Ongoing platform, gather more precise results,
and provide a deeper analysis on this topic relative to
the FVC-ICAO dataset and requisites. Also, we will
evaluate our method on other datasets like CelebA
(Liu et al., 2015) and CIFAR-10 (Krizhevsky, 2009).
5 CONCLUDING REMARKS
This research ultimate goal is to develop a Neural
Architecture Search (NAS) method with proven ef-
ficacy in ICAO requisites compliance checking and
applicable in other contexts of Multi-Task Learning
(MTL) such as MNIST, FASHION-MNIST, CIFAR-
10, and Celeb-A. These datasets are commonly used
in the evaluation of NAS methods. We initially pro-
posed a method of NAS based on a previous work
presented in the literature. The proposed method uses
REINFORCE algorithm to train a Network Controller
(LSTM) to find the best neural net architecture given
a small set of parameters, such as the maximum size
of a branch and the number of training epochs. The
neural net found after the search is evaluated as the
best to solve a given set of tasks simultaneously on
a specific dataset. The final objective is that the im-
plemented method of NAS can automatically group
tasks and create branches inside the neural network
architecture.
We evaluated our proposed approach of NAS ini-
tially based on FVC-ICAO dataset and compared the
achieved results of NAS with results obtained with
handcrafted STL and MTL methods and literature
methods. The preliminary results of the NAS REIN-
FORCE approach are competitive, with a 5.86% me-
dian EER in the FVC-ICAO dataset. The main con-
clusion of this paper is that even with a simple neural
architecture search method, it is possible to achieve
reasonable results close to human handcrafted archi-
tectures.
ACKNOWLEDGEMENTS
This study was financed in part by CNPq research
agency (https://www.gov.br/cnpq) and by VSOFT
company (https://www.vsoft.com.br/).
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
690

REFERENCES
BioTest (2017). Result of algorithm biotest 1.3.8 on ficv-
1.0. https://biolab.csr.unibo.it/FvcOnGoing/UI/Form/
AlgResult.aspx?algId=2787. Visited: Dec-2022.
Caruana, R. (1997). Multitask Learning. Machine Learn-
ing, 28(1):41–75.
Elsken, T., Metzen, J. H., and Hutter, F. (2019). Neural
architecture search: A survey. Journal of Machine
Learning Research, 20:1–21.
Ferrara, M., Franco, A., Maio, D., and Maltoni, D. (2012).
Face image conformance to ISO/ICAO standards in
machine readable travel documents. IEEE Transac-
tions on Information Forensics and Security, 7:1204–
1213.
Ferrara, M., Franco, A., Maio, D., and Mal-
toni, D. (2022). FVC-ongoing. benchmark
area: Face image ISO compliance verification.
https://biolab.csr.unibo.it/FVCOnGoing/UI/Form/
BenchmarkAreas/BenchmarkAreaFICV.aspx. Vis-
ited: Dec-2022.
Guido, A. C. M. S. (2017). Introduction to Machine Learn-
ing with Python. O’Reilly, third edit edition.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Iden-
tity Mappings in Deep Residual Networks. LNCS,
9908:630–645.
ICAO (2015). Doc 9303 - Machine Readable Travel Docu-
ments - Part 1: Introduction - 7th Edition.
ISO (2017). ISO/IEC 19754-5 information technology —
biometric data interchange formats — part 5: Face
image data. https://www.iso.org/standard/50867.html.
Visited: Dec-2022.
Krizhevsky, A. (2009). Learning Multiple Layers of Fea-
tures from Tiny Images. Technical report, MIT.
Leang, I., Sistu, G., B
¨
urger, F., Bursuc, A., and Yoga-
mani, S. (2020). Dynamic task weighting methods
for multi-task networks in autonomous driving sys-
tems. In 2020 IEEE 23rd International Conference on
Intelligent Transportation Systems (ITSC), pages 1–8.
IEEE.
Liu, C., Zoph, B., Neumann, M., Shlens, J., Hua, W.,
Li, L.-j., Fei-fei, L., Yuille, A., Huang, J., and Mur-
phy, K. (2018a). Progressive Neural Architecture
Search. Proceedings of the 15th European Conference
on Computer Vision, pages 19–34.
Liu, H., Simonyan, K., and Yang, Y. (2018b). Darts:
Differentiable architecture search. arXiv preprint
arXiv:1806.09055.
Liu, Z., Luo, P., Wang, X., and Tang, X. (2015). Deep
learning face attributes in the wild. Proceedings of the
IEEE International Conference on Computer Vision,
pages 3730–3738.
Lu, Y., Kumar, A., Zhai, S., Cheng, Y., Javidi, T., and Feris,
R. (2017). Fully-adaptive feature sharing in multi-task
networks with applications in person attribute classi-
fication. In Proceedings of the IEEE conference on
computer vision and pattern recognition, pages 5334–
5343.
Maltoni, D., Maio, D., Jain, A. K., and Parbhakar, S. (2009).
Handbook of Fingerprint Recognition. Springer, 2nd
edition.
Pham, H., Guan, M. Y., Zoph, B., Le, Q. V., and Dean,
J. (2018). Efficient Neural Architecture Search via
parameter Sharing. 35th International Conference on
Machine Learning (ICML 2018), 9:6522–6531.
Ruder, S. (2017). An Overview of Multi-Task Learning in
Deep Neural Networks. arXiv, pages 1–14.
Sandler, M., Howard, A., Zhu, M., Zhmoginov, A., and
Chen, L. C. (2018). MobileNetV2: Inverted Resid-
uals and Linear Bottlenecks. Proceedings of the IEEE
Computer Society Conference on Computer Vision
and Pattern Recognition, pages 4510–4520.
Selvaraju, R. R., Cogswell, M., Das, A., Vedantam, R.,
Parikh, D., and Batra, D. (2020). Grad-CAM: Vi-
sual Explanations from Deep Networks via Gradient-
Based Localization. International Journal of Com-
puter Vision, 128(2):336–359.
Simonyan, K. and Zisserman, A. (2015). Very deep con-
volutional networks for large-scale image recognition.
In International Conference on Learning Representa-
tions (ICLR), pages 1–14.
Sun, X., Panda, R., and Feris, R. (2019). AdaShare: Learn-
ing what to share for efflcient deep multi-task learn-
ing. arXiv, pages 1–19.
Suteu, M. and Guo, Y. (2019). Regularizing deep multi-task
networks using orthogonal gradients. arXiv preprint
arXiv:1912.06844.
Szegedy, C., Vanhoucke, V., Ioffe, S., Shlens, J., and Wo-
jna, Z. (2016). Rethinking the inception architecture
for computer vision. In Proceedings of the IEEE con-
ference on computer vision and pattern recognition,
pages 2818–2826.
Vandenhende, S., Georgoulis, S., De Brabandere, B., and
Van Gool, L. (2019). Branched multi-task net-
works: deciding what layers to share. arXiv preprint
arXiv:1904.02920.
Vandenhende, S., Georgoulis, S., Van Gansbeke, W., Proes-
mans, M., Dai, D., and Van Gool, L. (2021). Multi-
task learning for dense prediction tasks: A survey.
IEEE transactions on pattern analysis and machine
intelligence.
Vsoft (2017). Result of algorithm biopass face 5.6 on ficv-
1.0. https://biolab.csr.unibo.it/FvcOnGoing/UI/Form/
AlgResult.aspx?algId=6336. [Visited Dec-2022].
Xie, S., Zheng, H., Liu, C., and Lin, L. (2019). SNAS:
stochastic neural architecture search. In International
Conference on Learning Representations, pages 1–17.
Zhang, L., Liu, X., and Guan, H. (2022). A tree-
structured multi-task model recommender. arXiv
preprint arXiv:2203.05092, pages 1–22.
Zhang, Y. and Yang, Q. (2021). A survey on multi-task
learning. IEEE Transactions on Knowledge and Data
Engineering, pages 5586–5609.
Zoph, B. and Le, Q. (2017). Neural architecture search with
reinforcement learning. In International Conference
on Learning Representations.
Zoph, B., Vasudevan, V., Shlens, J., and Le, Q. V. (2018).
Learning Transferable Architectures for Scalable Im-
age Recognition. Proceedings of the IEEE Computer
Society Conference on Computer Vision and Pattern
Recognition, pages 8697–8710.
Neural Architecture Search in the Context of Deep Multi-Task Learning
691
