
Exploring False Demand Attacks in Power Grids with High PV
Penetration
Ashish Neupane
a
and Weiqing Sun
b
The University of Toledo, 2801 Bancroft St., Toledo, OH, U.S.A.
Keywords: False Data Injection Attacks, Kalman Filter-based Detector, High PV Penetration, False Demand Attacks,
Dynamic Threshold Detectors.
Abstract: The push for renewable energy has certainly driven the world towards sustainability. However, the
incorporation of clean energy into the electric power grid does not come without challenges. When
synchronous generators are replaced by inverter based Photovoltaic (PV) generators, the voltage profile of
the grid gets considerably degraded. The effect in voltage profile, added with the unpredictable generation
capacity, and lack of good reactive power control eases opportunities for sneaky False Data Injection (FDI)
attacks that could go undetected. The challenge is to differentiate these two phenomena. In this paper, an
attack is explored in a grid environment with a high PV penetration, and challenges associated with designing
a detector that accounts for inefficiencies that comes with it is discussed. The detector is a popular Kalman
Filter based anomaly detection engine that tracks deviation from the predicted behaviour of the system. Chi-
squared fitness test is used to check if the current states are within the normal bounds of operation. We identify
the vulnerability in using static and dynamic threshold detectors which are directly affected by day-ahead
demand prediction algorithms that have not been fully evolved yet. Finally, we use some of the widely used
machine learning based anomaly detection algorithms to overcome the drawbacks of model-based algorithms.
1 INTRODUCTION
The electric power grid has seen a lot of changes in
recent years. Traditionally, power system comprised
of synchronous generators with high power
generation capability and a predictable voltage profile
that fluctuated slightly throughout the day. These
synchronous generators almost exclusively provided
the bulk system voltage regulation. However, that is
quickly changing, and with the synchronous fossil
fuel and nuclear-powered generators being retired
slowly but steadily, it has led to the need for
renewable generation to contribute more significantly
to the power system voltage and reactive regulation
(McDowell & Walling, 2016).
The synchronous generators reliably produce
reactive power by controlling the excitation current
through the rotors. Although there is a limit to the
magnitude of field current that can be supplied to
rotor windings of a generator to produce reactive
power, its production has little effect on the terminal
a
https://orcid.org/0000-0001-8481-7306
b
https://orcid.org/0000-0002-6973-0509
voltage of the generator. That helps the synchronous
generators achieve a good voltage profile.
On the other hand, due to the limited converter
current capacity of PV, its reactive power capacity is
usually smaller compared with that of a synchronous
generator, especially when PV’s real power output is
close to the rated value. Inverters used for solar PV
and wind plants can provide reactive capability at
partial output, but any inverter-based reactive
capability operating at full power implies that we
need a larger converter to handle full active and
reactive current (Till et al., 2020). This means either
the PV generators would have to operate significantly
lower than their maximum rated output, or make a
trade-off in the voltage.
The grid is changing substantially with the
introduction of Distributed Energy Resources (DER)
and wide adoption of renewables. With these ongoing
changes in the grid, the traditional definition of grid
stability is not always applicable. Most of today’s
infrastructure is internet accessible, and false data
124
Neupane, A. and Sun, W.
Exploring False Demand Attacks in Power Grids with High PV Penetration.
DOI: 10.5220/0011695800003405
In Proceedings of the 9th International Conference on Information Systems Security and Privacy (ICISSP 2023), pages 124-134
ISBN: 978-989-758-624-8; ISSN: 2184-4356
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

injection attacks could give an indication that the
voltage levels on buses with PV generators are very
low, when the generator could be operating normally.
Normally, this would not be a problem, because false
data injection attacks are easily detectable in power
systems with low PV penetration, because these
systems have predictable voltage and current levels.
Since the injections would have voltage/current levels
that vary significantly from the voltage levels at
which synchronous generators operate, a Chi-squared
detector would easily pick up these anomalies. The
same detector would also detect the injection attacks
at systems with high PV penetration, however the
system parameters during normal operation at high
PV penetration when PV generators are close to
maximum power generation limits, and during attacks
at low PV penetration would be indistinguishable to
the detector.
This paper aims at showing an attack scenario that
takes advantage of poor voltage profile during peak
loads at a grid with high PV penetration. We compare
how the traditionally used model-based algorithms
perform against the machine learning based
algorithms in such a condition. For model-based
algorithm, we use Kalman Filter based detector,
which is widely researched in state estimation as well
as detection of attacks. However, unlike other
research, our model is based on day-ahead demand
predictions, which defines the normal operation of the
system and ultimately thresholds for the states at any
given time of the day. The states are highly dependent
on the demand, especially in grids with high PV
penetration, and our model takes that into account to
get a better prediction. However, the crucial part of
our work is showing how model-based algorithms
perform poorly in high PV scenarios with high false
positives.
2 RELATED WORKS
Detection methods for False Data Injection Attacks
have been researched for a few decades. These
algorithms are broadly categorized as model-based
detection algorithms and data-driven detection
algorithms (Musleh, 2020). Duan et al. (2018), Chung
et al. (2017), Inayat et al. (2022), and Jiang et al.
(2017) extensively used Weighted Least Squares
algorithm. These first detectors were static and
iterative in nature, which did not use the last state to
update the new state. That made them slow and
processor intensive. Kurt et al. (2018) and Wang et al.
(2019) used Kalman filters and some of its variations.
Karimipour & Dinavahi (2017, 2018) specifically
used Extended Kalman Filters and were able to
address non-linearity in the system and yielded more
precise estimate. Unlike WLS, these detectors are
dynamic in nature and use the last state to update the
current state.
Some detection algorithms are however
estimation-free. Cooperative Vulnerability Factor
(CVF) employs secondary output of voltage
controllers that converges to zero if the system is
under the FDI attack (FDIA) (Sahoo et al., 2019).
This technique was used in microgrids environment.
Another technique called Matrix Separation (MS)
exploits the sparse nature of FDIA by separating
nominal states of power grid and anomaly matrices
(Li et al., 2019; Liu et al., 2014). Ameli et al. (2019)
and Ashok et al. (2016) presented some similar
techniques. Data-driven detection algorithms are
popular class of algorithms broadly classified as
Machine Learning, Data Mining and other
miscellaneous algorithms. Supervised learning
technique use datasets that have labelled data to
separate attacks from the normal flow. They have
high accuracy but cannot detect new variation of
attacks. Unsupervised learning does not need labelled
data but is extremely difficult to model. Support
Vector Machine (SVM), which is a type of supervised
learning is the most utilized in FDIA. Binna et al.
(2018), Foroutan & Salmasi et al. (2017) and Wang
et al. (2019) have presented works in this area. In the
unsupervised category, K-means clustering is very
popular. The works of Zanetti et al. (2019) and Viegas
& Vieira (2017) are some of the notable ones.
A wide variety of Kalman Filter has been used in
the detection of False Data Injection Attacks. One of
the challenges faced in the research is modelling non-
linear relationship of power and voltages in the grid.
Farsadi et al. (2017) presented dynamic state
estimation that does not require calculation of
Jacobian matrix, which decreases the processing
time. Similarly, Qi et.al (2018) introduced cubature
Kalman Filter (CKF) that has a non-linear observer.
These were then tested on a 68-bus system under
various uncertainties in a realistic scenario. The
authors showed that the model was comparatively
more robust to uncertainties in the systems including
cyber-attacks.
A risk mitigation strategy was presented by Taha
et al. (2018) that addresses dynamics in the system for
higher order depictions by utilizing a dynamic state
estimator. Minot et al. (2019) proposed a unique
approach to dynamic state estimation. The algorithm
employs a fully distributed approach where the
estimation has an innovation design element for
attack detection which reduces the overhead in
Exploring False Demand Attacks in Power Grids with High PV Penetration
125
communication. Zhang et al. (2014) designed an
Adaptive Kalman Filter with Inflatable Noise
Variances (AKF with InNoVa) algorithm that uses a
2-stage system that estimates static states like voltage
magnitudes as well as dynamic states like generator
rotor angles. The first stage of the system filters out
the impact of incorrect system modelling and bad
PMU measurements using AKF with InNoVa. The
result in the first stage is served as a measurement to
the second stage which has an Extended Kalman
Filter (EKF). Manandhar et al. (2014) used Chi-
squared detector to detect anomalies in the system.
The residuals from Kalman filter were fed to a
Euclidean detector which has the parameters for
normal level of the system and detects if there is any
deviation from the normal operation.
However, to our knowledge, none of the algorithms
have been tested in a high PV penetration environment
where, at peak demands, the grid shows behavior
which mimics an attack. The grid supposedly needs to
know the context to a wide number of variables to
predict accurately in such scenario. We test this
hypothesis in this paper and compare model-based
approach with data-driven algorithms.
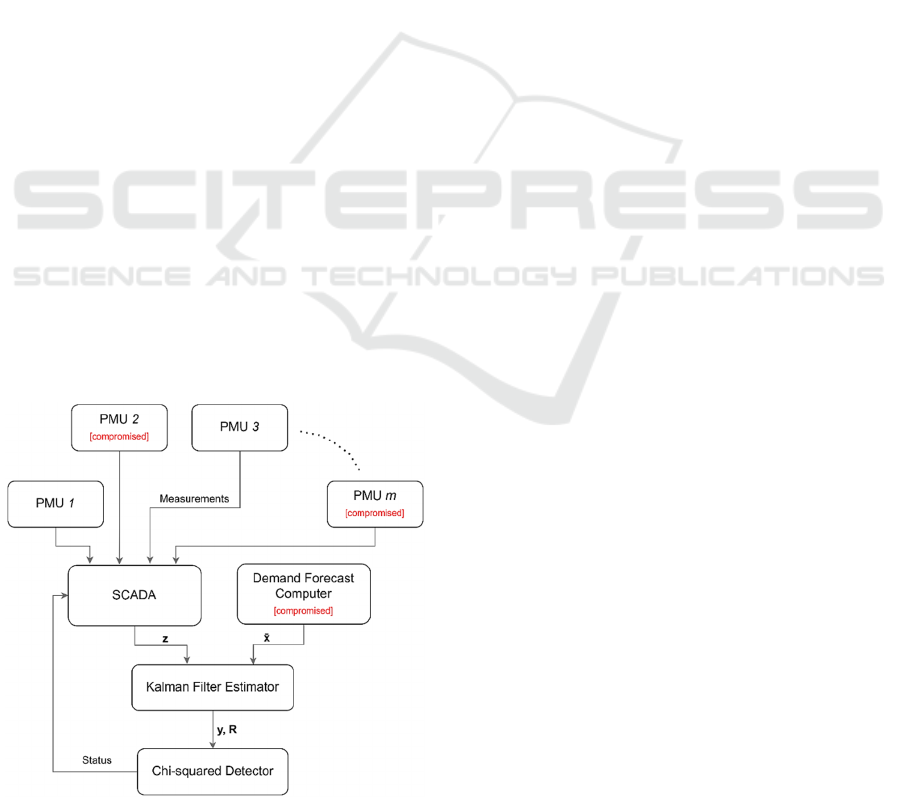
3 SYSTEM MODEL
The system consists of a Supervisory Control and
Data Acquisition (SCADA) system, which gets the
measurements from the Phasor Measurement Units
(PMU) capable of measuring line currents and bus
voltages as well as detection results from a Chi-
squared detector. The system model is shown using
the block diagram in Fig. 1.
Figure 1: Block diagram of the system model.
The measurements from all sections of the grid are
collected and that data is fed to the state estimator
engine, which filters out the measurement and
process errors, and generates the best estimate of the
system. The Chi-squared detector is aware of the co-
variances between different states of the system and
gets the most recent data from the estimator. The
detector then generates the result and sends it back to
the SCADA.
3.1 Kalman Filter Anomaly Detector
The Kalman Filter has been extensively used in
various applications in mathematics, engineering, and
economics. The filter is robust and provides good
estimation of systems. At its core, Kalman filter
balances the prediction of states and measurements of
the states. Based on which of the two has higher
beliefs, process or measurements, the filter calculates
its estimation. It assumes that the measurement error
variance and process covariance is already known.
The prediction equation is given below.
x
= Fx + Bu (1)
P
= FPF
T
+ Q (2)
where,
x and P are the state mean and covariance
F is the state transition function
Q is the process co-variance
B and u are the control inputs which is 0 here
The first equation calculates the current state
based on the last state and the state transition matrix.
The states in the equation are vectors of real and
imaginary voltages given by equation (3).
Re(z)
Im(z)
=
Re(H)
Im(H)
-Im(H)
Re(H)
Re(x)
Im(x)
Re(v)
Im(v)
(3)
Unlike most of the research, where state transition
matrix is taken as identity matrix because it is
assumed that the next state is the mean of the stable
state and some process error, our research uses pre-
computed factors obtained from the demand forecast
computer. The state transition matrix is derived for
each time step using pre-obtained data from the
demand forecast computer. This data is then used to
simulate the load flow for the grid and get a prediction
of various states for each time step. It should be noted
that estimation is a two-part process: predict and
update.
The prediction step always lessens the belief that
the estimator has towards the system. In other words,
ICISSP 2023 - 9th International Conference on Information Systems Security and Privacy
126

instead of having high probability in a small range of
states, the estimates get dispersed to a slightly wider
range of values with lesser probabilities. That is
corrected by the update state. The measurement
equation is shown using equation 4 below.
y = z - Hx (4)
K = PH
T
HPH
T
+ R
-1
(5)
x = x + Ky (6)
P =
I - KH
P (7)
where,
y is the residual
H is the measurement function/matrix
z and R are the measurement mean and noise
covariance
P and K are the state covariance and Kalman gain
The residual y is the difference between measured
values and predicted measurements which have been
derived from the predicted states using H. The
variables K and P converges to some stable values.
The measurement matrix converts the states from the
state space to its corresponding measurements in the
measurements space. The calculation of H matrix has
been explained by Zhang et al. (2010). The
conversion of states to the measurement space
however also changes the covariance. Hence, it needs
to be recalculated in each iteration which is given by
the relation in equation (7). It should also be noted
that although the Kalman gain remains fairly stable
after getting converged, the value should also be
calculated in each state for a more accurate prediction
and to avoid propagation of error.
3.2 Demand Forecast
Although these research works have different
approaches and techniques, most of them have a
similarity in how they assume the states change with
time. Most of the research assumes the states remain
fairly stable, and only change slightly by introducing
a Gaussian noise. While that may be true for very
small amount of time, real and reactive power
demand is very dynamic in a grid environment and
there are always errors in demand as shown in Fig. 2.
This fact means that failure to include that in the
system model makes it extremely difficult to model
state changes into the system, and consequently
mistake demand changes for an FDIA.
Our research takes a different approach. At the
core of the system model is a day-ahead demand data
Figure 2: Histogram of day-ahead demand errors.
that drives the state transition function F, and
especially state co-variance Q in the Kalman filter
equation. Predicting demand ahead of time is a highly
complex procedure. Many factors will need to be
considered when generating a load forecast. Some of
these are simple like climate and weather, historical
usage patterns, day of the week, social events,
residential or industrial load, and so on, while others
are complicated like Behind the Meter (BTM). The
Independent System Operators (ISOs) have been
working relentlessly to improve the forecasting
methodologies over the years. In recent days, they
have reached a point where day ahead forecasts were
within 1% of actual peak demand in most of the days
(Reliable Energy Analytics, 2021). The main
challenge currently is accounting for BTM PV supply
resources.
In order to use Kalman filter for state prediction,
the error in predictions should be normally
distributed. There has been a large number of research
as well as implementations for day-ahead power
demand and net-demand predictions. A report by
Reliable Energy Analytics (2021) shows some of the
techniques used by a few ISOs. We did a Shapiro-
Wilk test on the day-ahead predictions used by
California Independent System Operator (CAISO)
using the data published on their website. The
prediction error passed the test, and the corresponding
histogram is shown in Fig. 2. However, our research
uses voltages as states, and because the relation
between voltage and power is non-linear, a normal
distribution would be skewed if such a conversion is
used. Some variations of Kalman filter like Extended
Kalman Filter (EKF) can be used to work with non-
linear systems, but we chose a different route. An
independent voltage prediction algorithm like the one
used by Mokhtar et al. (2021) would predictably have
errors which are normally distributed. We move
forward with that assumption and artificially inject
Gaussian normal process error.
3.3 Chi-squared Detector
The Kalman filter is used in conjunction with a Chi-
squared detector in this research. The Chi-squared
Exploring False Demand Attacks in Power Grids with High PV Penetration
127
detector is widely used for goodness of fit tests. That
makes it practical for use in detecting false data
injections where the normal states of the system can
be plugged in, and with the knowledge of co-variance
in the states, the Chi-squared values can be obtained.
Mo & Simopoli (2010) showed the following can be
computed.
g
t
= y
-1
Ry (8)
The measurement covariance matrix R is crucial
in the above equation. If the residual deviates from
expected values, the Chi-squared value goes higher,
indicating an inconsistency between the expected and
real value. The two suspected causes of this
inconsistency are false data injection attacks, and a
switch from synchronous generators to PV
generators, which has a poor voltage profile. The
challenge, and the focus of research is to differentiate
the two.
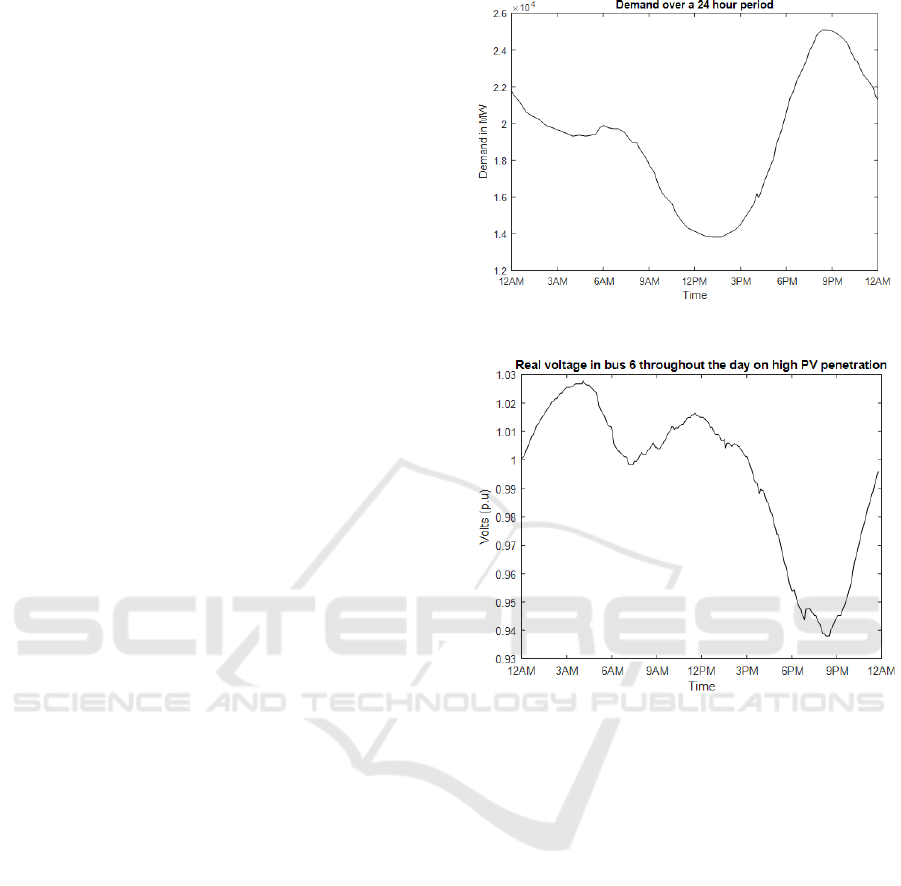
4 IMPLEMENTATION AND
EVALUATION
The research is simulated on an IEEE 14 bus with the
standard load profile. A 24-hour demand curve is
extracted from CAISO’s website as shown in Fig. 3
that drives the real and reactive power demands on
each bus. The load flow is solved for each demand,
and the corresponding states are obtained.
4.1 Simulation Setup
In our setup, an IEEE 14 bus is simulated using Power
World Simulator. The simulator runs 24-hour load
demands and calculates the corresponding states and
measurements. The load demand is obtained from
CAISO every 5 minutes totaling 289 demand points.
These data points are interpolated to obtain 5,000 data
points which is imported into MATLAB where
Kalman filter predicts and estimates the real and
imaginary voltages on each bus. The per-unit real
voltage on bus 6 over 24-hour is shown in Fig. 4.
The load flow is solved using the MATPOWER
package. The Newton’s method is used to solve non-
linear load flow equations. The Kalman filter
estimator gets measurement data from the load flow
solution and makes estimates using the day-ahead
predictions and measurements. The reactive power
generation in any power system is restricted by the
reactive capability curve. The general idea behind
reactive capability curve is that, for any given amount
of active power generation, there is a limit on the
Figure 3: Power demand over a 24-hour period.
Figure 4: Voltage levels over a 24-hour period in bus 6.
amount of reactive power that can be generated. The
limit is determined by the capability curve. Fig. 5
shows the operating area of the PV inverters which
are highly restricted by the power factor requirements
and internal limits. The reactive power generation is
limited in PV inverters, and although they can have
D-shaped curve, this is not an industrial standard
(Mcdowell & Walling, 2016).
There is a special STATCOM mode which allows
the PV inverters to generate reactive power without
producing any active power and use that for voltage
regulation. However, this mode is not always
available due to restrictions. The reactive capability
curve of the operating range was inserted into the
Power World Simulator using a piecewise linear
model. The PV control model, while being a crucial
part of the system, has limited scope in our research
and its intricacies are almost independent on how the
attacks are carried out. Hence, it is excluded.
The simulation setup for machine learning based
detector is highly rigorous because unlike model-
based algorithms where the states would be calculated
ICISSP 2023 - 9th International Conference on Information Systems Security and Privacy
128
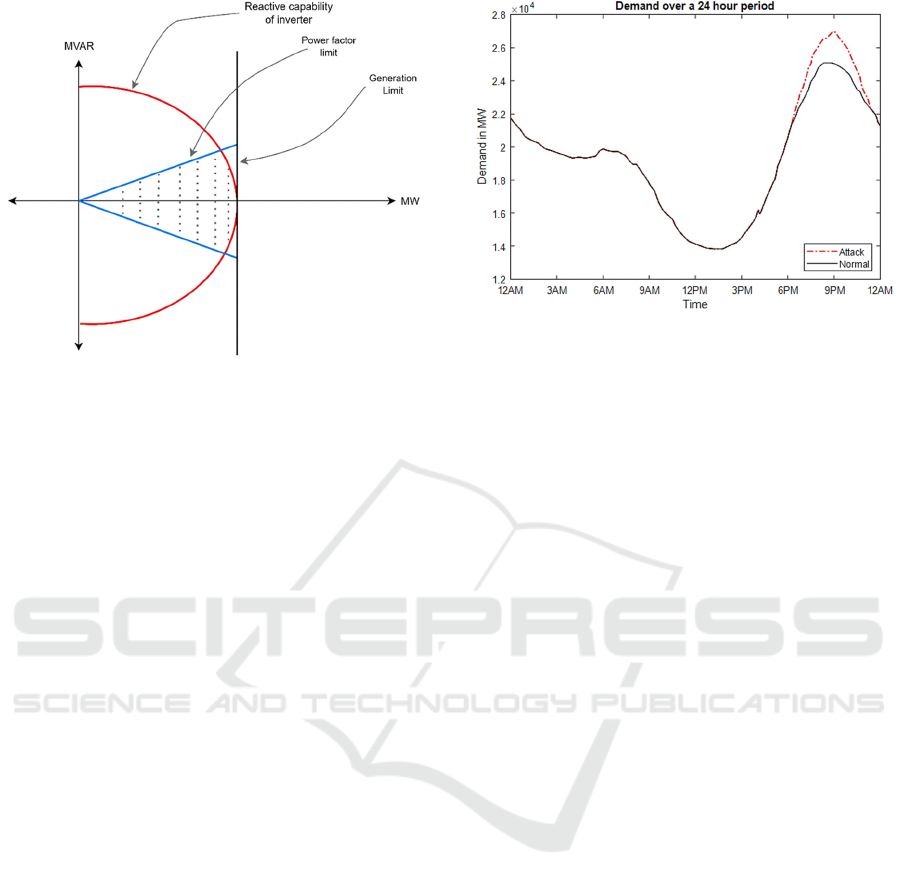
Figure 5: Reactive capability curve of PV generator.
using an equation, machine learning algorithms rely
on pre-simulation of all the load flow condition that
the model may encounter in real life.
4.2 Attack Model
The false data injection attack is carried out by
changing the measurements on a PMU unit. This
paper assumes that the attacker has access to a limited
number of PMUs in the grid and is able to manipulate
bus voltages and line current measurements on that
PMU. As proposed by Abur & Expósito (2004), any
unsophisticated attack can be easily detected using
plausibility tests. Some red flags include voltage
magnitudes that are negative or considerably higher
or lower than the operating range of the bus, failed
KVL and KCL tests and power equations.
Any sophisticated attack would easily pass those
tests. Hence, we are exposing a difficult-to-detect
attack, which makes the detection extremely hard.
The attack impersonates a drop in voltage due to poor
reactive performance that results in a less ideal
voltage profile of PV generators. This attack is
specifically targeted at a system that has higher PV
penetration. Till et al. (2020) showed how the
increase in penetration of PV generators results in a
poor voltage performance.
In the attack, as shown in Fig. 6, the attacker can
get the bad voltage profile measurements and inject it
during the time when the grid is performing normally.
The detector will have difficulty in differentiating
if the anomaly is caused by an attack or the high PV
penetration. The challenge with this kind of attacks is
that there should be no visible transition between a
normal operation and the attack. A sudden drop in
voltage, or a sudden loss in a portion of the grid is a
Figure 6: False demand injected by the attacker.
major red flag that will draw immediate attention. We
assume that the attacker can access demand forecasts
on a generator bus which is being attacked. The
access can be obtained by compromising a computer
which stores demand forecasting information. The
attacker can even go a step further and run their own
demand forecast algorithm using the historical data
and the freely available machine learning tool.
The PV generators’ voltage drops quickly when
approaching active and especially reactive power
generation limit (Till et al., 2020). The data in the
demand forecast could be compromised and give a
false impression that the demand is increasing. This
helps justify the voltage drop across busses. The
reason that helps make the attack successful is that it
blends in with the poor voltage control of PV
generators. The timing of the attack during peak
summer hours could even make it go unnoticeable.
4.3 Calculation of Kalman Filter
Parameters
The states in Kalman filter are the parameters whose
estimations are done by balancing the value between
its measured and predicted versions. The states in this
work are all the real and imaginary voltages in a 14-
bus setup. The following expression shows the states
of the setup.
x =
Re
V1
Re
V2
. .Im
V1
. . Im(V14)
T
(9)
There are n states in the system. Hence, the size
of x is n×1. When the simulation starts, the states
have to be initially set to a certain stating condition.
Usually, the rule of thumb is to start the states with a
flat start condition. The states are initialized by setting
all the real voltages to 1 and all the imaginary voltages
to 0. However, the states of the grid are tentatively
known and hence, the grid configuration is pre-
Exploring False Demand Attacks in Power Grids with High PV Penetration
129

simulated to get the stable values of the states, which
results in faster convergence.
The state transition matrix defines the transition
of states from current state to next state (Labbe,
2020). The grid is a very dynamic infrastructure, and
hence it is extremely difficult to accurately predict the
next state of the system based on the current state.
However, in this case, because the states are voltages,
the Automatic Voltage Regulation (AVR) system
always tries to stabilize the voltage between ±5% of
the nominal voltage of 1 P.U, and hence, it is easier
to compute the state transition matrix.
This research work uses a different approach in
calculating F based on the real-world scenario.
Unlike other research where states are modelled to
vary randomly between certain ranges, the work takes
into account that the grid has a dynamic active and
reactive power demand that varies throughout the
day, and it affects the states of the system based on
whether majority of its power comes from
synchronous generators or PV generators. The day-
ahead demands throughout the day is download from
California Independent System Operator (CAISO),
simulated on an IEEE 14 bus configuration and the
matrix F is calculated for each time step. However,
the research work would be of no use if F was made
to be 100% accurate. Instead of using hour-ahead
demands for F, day-ahead demands are used. And
because day-ahead demands are slightly inaccurate
than hour-ahead demands, there is a need for
accurately predicting the next state by using
measurements. For instance, the next state from the
current state is calculated as follows:
x =
x
1
x
2
x =
A
0
0
B
x
1
x
2
State transition matrix is a n×n matrix. Here, the
second equation predicts the next state using F. The
state x
1
changes by a factor of A and x
2
changes by a
factor of B. It is assumed that the states transition only
depend the state itself and not on other states, the off-
diagonal elements of F are 0. However, in a grid, the
states do depend on the values of other states which
has to be taken into account. That is done by
incorporating state co-variance P and process
covariance Q.
As discussed earlier, the state transition matrix
takes time-dependent state transitions into account
which is part of the process. Kalman filter also has B
and u that considers any known external forces or
variables, which is ignored in this work. However, the
possibility of any unknown variables changing the
predictions is huge. The filter should be designed in a
way that expects some unaccounted variables and
models uncertainty using it as a variable in the
equation. The process covariance Q helps the filter
account for those uncertainties.
The modelling of Q matrix is very crucial and one
of the most difficult tasks of a Kalman filter and it is
important to model Q accurately. If Q is too low, the
filter will have more confidence in the prediction
model and ignore noises in the system. If it is too
high, the filter becomes inaccurate because its
prediction will be largely influenced by the noise
(Labbe, 2020). While there are various approaches to
calculating Q, the appropriate Q matrix was obtained
in this work by simulating the IEEE bus under various
load conditions and evaluating the errors obtained in
the simulation. When following this method, the
simulation should be iterated numerous times to
account for various load conditions and uncertainties
in the grid.
The measurement covariance R represents the
predicted observation errors. This is sometimes
referred as sensor noise and can be estimated easily
by comparing the expected results with the sensor
measurements (Labbe, 2020).
The state covariance matrix P shows the relation
between all the system states. Mathematically, it is a
measure of joint probability of two random variables.
The covariance is defined as:
cov
X, Y
= E[
X-E
X
Y-E
Y
] (10)
where, E[X] is the expected value of random
variable X.
A positive value of covariance between two
variables, or state in this case shows a direct relation
between those state and a negative value indicates
inverse relationship. The matrix P is initialized in the
Figure 7: State covariance convergence.
similar way to the states. It doesn’t have a strict
requirement like Q because P is optimized in each
time step of Kalman filter equations, and ultimately
ICISSP 2023 - 9th International Conference on Information Systems Security and Privacy
130
converges to a stable value (Labbe, 2020) as shown
in Fig. 7.
The state covariance matrix P is a symmetric
matrix of size n×n where the element P
ij
shows the
relationship between states i and j. The Kalman filter
equations have n states and m measurements. The
measurements done on the system can be different
from the states. Therefore, in order to get a residual
value between the predicted states and measurement,
all the states have to be converted to the measurement
space to make mathematics compatible to the same
operands. Fig. 8 illustrates this concept where the data
points on the state space are converted to datapoints
in measurement space using the measurement
function H.
In order to convert states x to its measurement
counterparts z, the m×n matrix H should be chosen
such that the resulting operation Hx gets converted to
measurements with elements V1, V5 and V8. Hence,
it is necessary to first come up with a relationship
between different voltages.
y
=
z –
Hx
y =
V
1
V
5
V
8
H
V
1
V
2
V
3
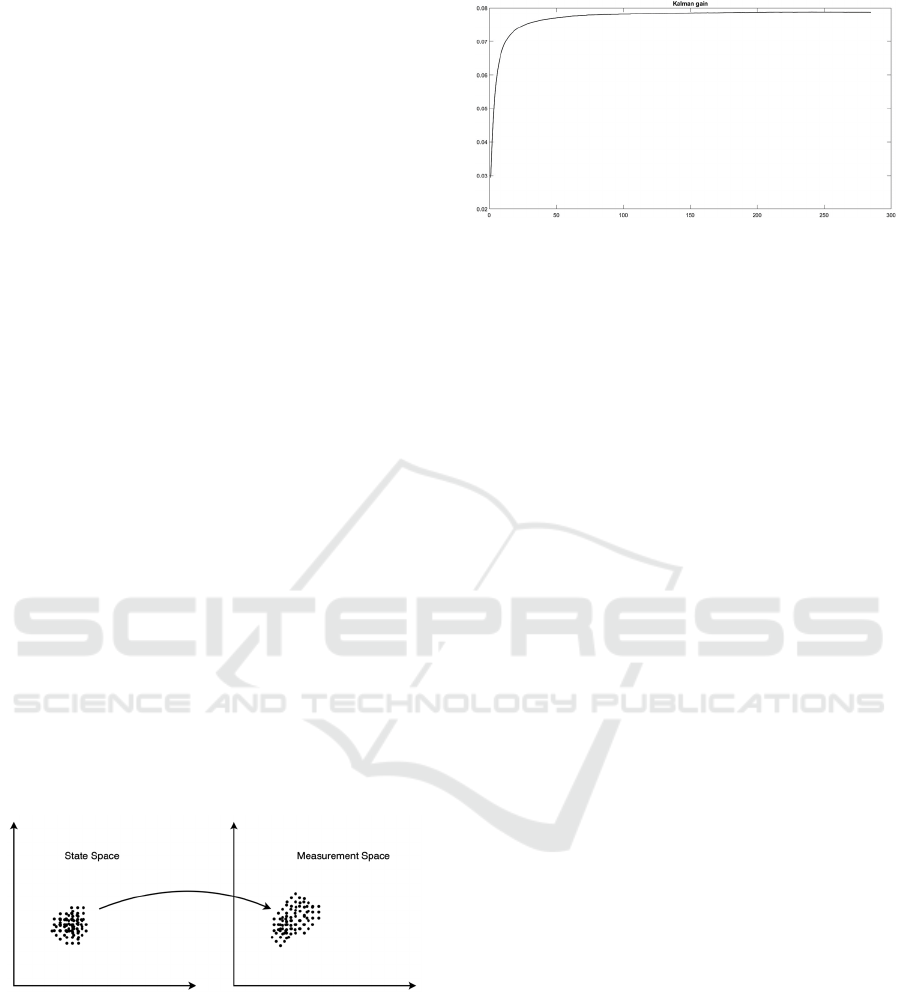
The Kalman gain decides whether the estimation
should lean towards predicted values or measured
values based on which value the filter has higher
confidence in (Labbe, 2020). Kalman gain also
converges to a stable value as shown in Fig. 9. In
matrix form, the Kalman gain is a n×m matrix which
sums each product between Kalman gains and
measurements for a particular state.
Figure 8: Conversion from state to measurement space.
4.4 Detection Using Model-based
Algorithms
The attack model was simulated on Power World
Simulator and MATLAB. During the period of the
attack between 6 PM and 11 PM, a false demand is
injected by the attacker where the demands are made
to go higher than expected. The detector has a static
Figure 9: Kalman gain convergence.
threshold level that determines the normal operation.
Any voltage levels above or below the normal
operating ranges will be picked up by the detector and
the Chi-squared value goes higher as the difference
between expected values and measured values goes
high. As Fig. 10 shows, the Chi-squared values kept
rising and ultimately exceeded the threshold during
the attack.
This was an expected behavior. However, running
a separate simulation with high PV penetration during
the interval of the attack, the graph was similar and
indistinguishable. This gives the realization that
under high PV penetration grid environment, a Chi-
squared detector alone cannot be used as a detector
because it will give many false positives. As the
system switches from solar to synchronous depending
on the generation capabilities, more false detection
alarms will be generated.
The results show that the detector is not able to
differentiate an attack from the poor voltage profile
of the PV generator. The top graph is simulated with
an attack, and the bottom graph is simulated with the
generator switched from synchronous to PV. Hence,
a traditional Chi-squared based detectors will raise a
large number of false positives if deployed in grids
with high PV penetration. A simple solution would be
modifying the Kalman filter model to expect voltage
degradation due to the switch to PV.
However, the problem with this approach is that
the attacker now has more flexibility for attacks even
when PV penetration is low and can easily carry out
attacks without the detector even noticing it. Another
solution could be changing the Kalman filter model
dynamically depending on the % of PV penetration in
the system. While this solution can accurately detect
attacks, the switch to PV in most of the plants is
unpredictable, and if the SCADA is compromised, the
detector is useless.
A slightly different approach was taken by Wang
et al. (2022). Dynamic threshold is used based on the
false alarm rate allowed at the current moment instead
of the static threshold. This allows adjusting the
Exploring False Demand Attacks in Power Grids with High PV Penetration
131

Figure 10: Chi-squared values during attacks vs high PV
penetration.
false alarm rate during periods where solar
penetration is high. However, solar generations and
net-demand is difficult to predict accurately. Wang et
al. (2022) mentioned that the yin-yang effect of
Behind the Meter (BTM) PV adversely affects the
net-demand prediction. Whatever BTM PV supply
does not get produced (i.e., due to weather), will
likely result in an increase in demand/load
approximately equal to the missing BTM supply.
Hence, the load forecasting algorithm continuously
misses its day-ahead net demand forecast. The
algorithm is only as good as the data provided to it,
and with the increasing number of customers using
BTM solar plants, the algorithm needs access to data
from these plants in real time to predict accurately.
This is currently not feasible because there are too
many variables to keep track of, and there is
inconsistency in the available customer data.
Fig. 11 shows maximum errors in net-demand
prediction over 10 days between June 16 and 25, 2022
in the data published by CAISO. On 23
rd
of June, the
maximum error was close to 30%. It only backs our
concern that dynamic threshold-based detectors
cannot be relied on to make estimations, which makes
them equally, if not more vulnerable than static
threshold-based detectors. This is not the only issue
that makes demand predictions unreliable. Various
kinds of faults can change the topology of the network
and alter the power demand at a particular generator.
The faults are random in nature and is almost
impossible to predict accurately.
4.5 Detection Using Machine Learning
Algorithms
We have explored four widely used anomaly
detection algorithms based on Machine Learning to
learn the behavior of the grid under varying load
condition and % PV penetration. The training dataset
Figure 11: Errors in day-ahead prediction over a 10-day
period.
includes 12 load demands from all months of the year
derived from California Independent System
Operator. Each 24-hour demand is then divided into
5000 loads, and each load on the grid changes
proportional to that load demand. The crucial part of
this simulation is that the same simulation is done
multiple times from 0%-100% PV penetration. The
load flow data used for simulation are per unit
voltages and MVAR generation and demand. Hence,
the grid not only knows how to correlate the grid
parameters, but any attempt to inject portions of
parameters like voltages and power demands is
detected by the anomaly detection model. The
training model is depicted using Fig. 12. Table 1
compares the FDIA detection capabilities of machine
learning and Kalman filter algorithms under 0% PV
penetration, while Table 2 compares the algorithms
when there is FDI attack, and the grid is operating
under 80% PV penetration. A crucial part of our work
is exploring the behavior of machine learning
algorithms when the grid is switched to solar.
Specifically, we are interested in observing if the
algorithm can differentiate higher PV penetration and
false data injection attacks, which the Kalman Filter
based algorithm failed to do.
As seen in Table 1 and 2, One-class Support
Vector Machine (OCSVM) algorithm has the best
accuracy among all the machine learning algorithms,
but also gives higher amounts of false positives. As
the Table 2 shows, the machine learning algorithms
have substantially lower false positive rate than
Kalman Filter which indicates that the poor voltage
profile during high PV penetration condition is ruled
not as attack but to higher solar penetration.
ICISSP 2023 - 9th International Conference on Information Systems Security and Privacy
132
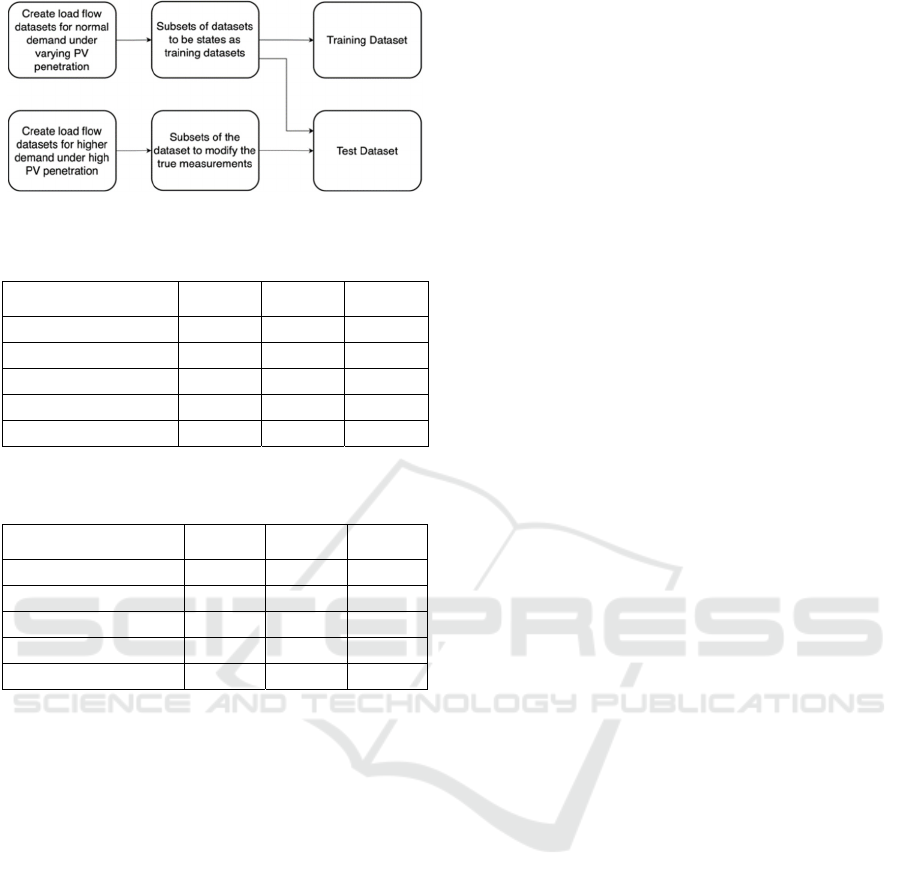
Figure 12: Machine learning training model.
Table 1: FDIA Detection Under 0% PV Penetration.
Algorithm Precision
False
Positive
False
Negative
Isolation Forest
93.9% 3% 13%
Local Outlier Factor
93.7% 2% 15%
OCSVM
96.3% 5% 9%
Mahalanobis Distance
93.9% 3% 13%
Kalman Filter
98.1% 1% 5%
Table 2: FDIA Detection Under Peak Load in 80% PV
Penetration.
Algorithm Precision
False
Positive
False
Negative
Isolation Forest
91.7% 4% 14%
Local Outlier Factor
91.7% 3% 15%
OCSVM
95.2% 5% 10%
Mahalanobis Distance
91.7% 3% 15%
Kalman Filter
68.5% 44% 5%
The machine learning algorithms are however not
100% efficient because the difference between the
characteristics of states during lower PV penetration
and mild false data injection attack is very subtle, and
we expect the results to improve with additional
training of the algorithms.
5 CONCLUSIONS
In this paper, we exposed a vulnerability associated
with model-based detectors and compared how
machine learning algorithms perform in the same
scenario. We concluded that the model-based detector
works best only on a grid environment with little to
no PV penetration. While dynamic thresholds can be
used to overcome this problem, we showed that the
grid’s behavior cannot be predicted accurately well
ahead of time. To attempt to do it accurately, massive
amounts of data from large number BTM devices
would have to be taken, which is not feasible now.
Finally, it was observed that, if trained substantially,
machine learning algorithms have the awareness to
understand if a degrading voltage profile is due to a
false data injection attack or a switch to PV
generators.
The paper used 5000 data points and 14 bus IEEE
setup for simulation. However, more accurate data
could be obtained if the simulation was done over
more load points that spanned a few days or even
weeks. Similarly, instead of using 14-bus, a larger
grid setup would have given a more realistic scenario.
These tasks could certainly be a done as future work
for the research. Additionally, new algorithms like
Artificial Neural Networks could be explored for this
research work.
REFERENCES
McDowell, J. & Walling, R. (2016, May 19). Reactive Power
Interconnection requirements for PV and wind plants:
Recommendations to NERC. UNT Digital Library
Till, J., You, S., Liu, Y., & Du, P. (2020). Impact of high PV
penetration on voltage stability. 2020 IEEE/PES
Transmission and Distribution Conference and
Exposition (T&D). https://doi.org/10.1109/td39804.2020
.9299973
Musleh, A. S., Chen, G., & Dong, Z. Y. (2020). A survey on
the detection algorithms for false data injection attacks in
smart grids. IEEE Transactions on Smart Grid, 11(3),
2218–2234. https://doi.org/10.1109/tsg.2019.2949998
Duan, J., Zeng, W., & Chow, M.-Y. (2018). Resilient
distributed DC optimal power flow against Data Integrity
Attack. IEEE Transactions on Smart Grid, 9(4), 3543–
3552. https://doi.org/10.1109/tsg.2016.2633943
Chung, H.-M., Li, W.-T., Yuen, C., Chung, W.-H., & Wen,
C.-K. (2017). Local cyber-physical attack with
leveraging detection in smart grid. 2017 IEEE
International Conference on Smart Grid
Communications (SmartGridComm). https://doi.org/
10.1109/smartgridcomm.2017.8340712
Inayat, U., Zia, M. F., Mahmood, S., Berghout, T., &
Benbouzid, M. (2022). Cybersecurity enhancement of
Smart Grid: Attacks, methods, and
prospects. Electronics, 11(23), 3854. https://doi.org/10.
3390/electronics11233854
Jiang, Q., Chen, H., Xie, L., & Wang, K. (2017). Real-time
detection of false data injection attack using residual
prewhitening in Smart Grid Network. 2017 IEEE
International Conference on Smart Grid
Communications (SmartGridComm). https://doi.org/
10.1109/smartgridcomm.2017.8340659
Kurt, M. N., Yilmaz, Y., & Wang, X. (2018). Distributed
quickest detection of cyber-attacks in Smart Grid. IEEE
Transactions on Information Forensics and
Security, 13(8), 2015–2030. https://doi.org/10.1109/
tifs.2018.2800908
Wang, X., Luo, X., Zhang, M., & Guan, X. (2019).
Distributed detection and isolation of false data
injection attacks in smart grids via nonlinear unknown
Exploring False Demand Attacks in Power Grids with High PV Penetration
133

input observers. International Journal of Electrical
Power & Energy Systems, 110, 208–222. https://
doi.org/10.1016/j.ijepes.2019.03.008
Karimipour, H., & Dinavahi, V. (2018). Robust massively
parallel dynamic state estimation of power systems
against Cyber-Attack. IEEE Access, 6, 2984–2995.
https://doi.org/10.1109/access.2017.2786584
Karimipour, H., & Dinavahi, V. (2017). On false data
injection attack against dynamic state estimation on
Smart Power Grids. 2017 IEEE International
Conference on Smart Energy Grid Engineering
(SEGE). https://doi.org/10.1109/sege.2017.8052831
Sahoo, S., Mishra, S., Peng, J. C.-H., & Dragicevic, T.
(2019). A stealth Cyber-Attack detection strategy for
DC microgrids. IEEE Transactions on Power
Electronics, 34(8), 8162–8174. https://doi.org/10.1109/
tpel.2018.2879886
Li, B., Ding, T., Huang, C., Zhao, J., Yang, Y., & Chen, Y.
(2019). Detecting false data injection attacks against
power system state estimation with fast go-
decomposition approach. IEEE Transactions on
Industrial Informatics, 15(5), 2892–2904. https://
doi.org/10.1109/tii.2018.2875529
Liu, L., Esmalifalak, M., Ding, Q., Emesih, V. A., & Han,
Z. (2014). Detecting false data injection attacks on
power grid by sparse optimization. IEEE Transactions
on Smart Grid, 5(2), 612–621. https://doi.org/
10.1109/tsg.2013.2284438
Ameli, A., Hooshyar, A., & El-Saadany, E. F. (2019).
Development of a cyber-resilient line current
differential relay. IEEE Transactions on Industrial
Informatics, 15(1), 305–318. https://doi.org/10.1109/
tii.2018.2831198
Ashok, A., Govindarasu, M., & Ajjarapu, V. (2016). Online
detection of stealthy false data injection attacks in
power system state estimation. IEEE Transactions on
Smart Grid, 1–1. https://doi.org/10.1109/tsg.2016.
2596298
Binna, S., Kuppannagari, S. R., Engel, D., & Prasanna, V.
K. (2018). Subset level detection of false data injection
attacks in smart grids. 2018 IEEE Conference on
Technologies for Sustainability (SusTech). https://
doi.org/10.1109/sustech.2018.8671357
Foroutan, S. A., & Salmasi, F. R. (2017). Detection of false
data injection attacks against state estimation in smart
grids based on a mixture gaussian distribution learning
method. IET Cyber-Physical Systems: Theory &
Applications, 2(4), 161–171. https://doi.org/10.1049/
iet-cps.2017.0013
Wang, D., Wang, X., Zhang, Y., & Jin, L. (2019). Detection
of power grid disturbances and cyber-attacks based on
machine learning. Journal of Information Security and
Applications, 46, 42–52. https://doi.org/10.1016/j.
jisa.2019.02.008
Zanetti, M., Jamhour, E., Pellenz, M., Penna, M.,
Zambenedetti, V., & Chueiri, I. (2019). A tunable fraud
detection system for advanced metering infrastructure
using short-lived patterns. IEEE Transactions on Smart
Grid, 10(1), 830–840. https://doi.org/10.1109/tsg.2017
.2753738
Viegas, J. L., & Vieira, S. M. (2017). Clustering-based
novelty detection to uncover electricity theft. 2017
IEEE International Conference on Fuzzy Systems
(FUZZ-IEEE). https://doi.org/10.1109/fuzz-ieee.2017.
8015546
Farsadi, Murtaza & Mohammadzadeh Shahir, Farzad &
Babaei, Ebrahim. (2017). Power System States
Estimations Using Kalman Filter.
Qi, J., Taha, A. F., & Wang, J. (2018). Comparing Kalman
filters and observers for power system dynamic state
estimation with model uncertainty and malicious cyber
attacks. IEEE Access, 6, 77155–77168. https://doi.org/
10.1109/access.2018.2876883
Taha, A. F., Qi, J., Wang, J., & Panchal, J. H. (2018). Risk
mitigation for dynamic state estimation against cyber
attacks and unknown inputs. IEEE Transactions on
Smart Grid, 9(2), 886–899. https://doi.org/10.1109/tsg.
2016.2570546
Minot, A., Sun, H., Nikovski, D., & Zhang, J. (2019).
Distributed estimation and detection of cyber-physical
attacks in Power Systems. 2019 IEEE International
Conference on Communications Workshops (ICC
Workshops). https://doi.org/10.1109/iccw.2019.8756653
Zhang, J., Welch, G., Bishop, G., & Huang, Z. (2014). A
two-stage Kalman filter approach for robust and real-
time power system state estimation. IEEE Transactions
on Sustainable Energy, 5(2), 629–636. https://
doi.org/10.1109/tste.2013.2280246
Manandhar, K., Cao, X., Hu, F., & Liu, Y. (2014).
Detection of faults and attacks including false data
injection attack in smart grid using Kalman filter. IEEE
Transactions on Control of Network Systems, 1(4),
370–379. https://doi.org/10.1109/tcns.2014.2357531
Zhang, J., Welch, G., & Bishop, G. (2010). Observability
and estimation uncertainty analysis for PMU placement
alternatives. North American Power Symposium 2010.
https://doi.org/10.1109/naps.2010.5618970
Mo, Yilin & Sinopoli, Bruno. (2010). False data injection
attacks in control systems. Preprints of the 1st Workshop
on Secure Control Systems.
Abur, A., & Expósito, G. A. (2004). Power System State
Estimation: Theory and implementation. CRC Press.
Reliable Energy Analytics. (2021). COMPARING ISO
LOAD FORECASTING METHODOLOGIES.
energycentral.com. https://energycentral.com/system/fi
les/ece/nodes/337915/2018-lf-methodologies-research-
report-final-ec.pdf
Wang, Y., Zhang, Z., Ma, J., & Jin, Q. (2022). KFRNN: An
effective false data injection attack detection in smart
grid based on Kalman filter and recurrent neural
network. IEEE Internet of Things Journal, 9(9), 6893–
6904. https://doi.org/10.1109/jiot.2021.3113900
Mokhtar, M., Robu, V., Flynn, D., Higgins, C., Whyte, J.,
Loughran, C., & Fulton, F. (2021). Prediction of
voltage distribution using deep learning and identified
key smart meter locations. Energy and AI, 6, 100103.
https://doi.org/10.1016/j.egyai.2021.100103
California ISO. (2022). CAISO. https://www.caiso.com
Labbe, R. R. (2020). Kalman and Bayesian Filters in
Python.
ICISSP 2023 - 9th International Conference on Information Systems Security and Privacy
134
