
Candidate Path Selection Heuristics for Multi-Agent Path Finding: A
Novel Compilation-Based Method
Pavel Surynek
Faculty of Information Technology, Czech Technical University in Prague
Thakurova 9, 160 00 Praha 6, Czech Republic
Keywords:
Multi-Agent Path Finding, Problem Compilation, Boolean Satisfiability, Path Selection Heuristics.
Abstract:
Multi-Agent path finding (MAPF) is a task of finding non-conflicting paths connecting agents’ specified initial
and goal positions in a shared environment. We focus on compilation-based solvers in which the MAPF prob-
lem is expressed in a different well established formalism such as mixed-integer linear programming (MILP),
Boolean satisfiability (SAT), or constraint programming (CP). As the target solvers for these formalisms act
as black-boxes it is challenging to integrate MAPF specific heuristics in the MAPF compilation-based solvers.
We show in this work how the build a MAPF encoding for the target SAT solver in which domain specific
heuristic knowledge is reflected.
1 INTRODUCTION AND
BACKGROUND
Multi-agent path finding (MAPF) represents a funda-
mental problem in artificial intelligence (Silver, 2005;
Ryan, 2007; Standley, 2010; Luna and Bekris, 2011;
Yu and LaValle, 2013a). The task is to navigate each
agent from the set of agents A = {a
1
,a
2
,...,a
k
} from
its initial position to a specified goal position. In
the standard discrete variant of MAPF, the environ-
ment is modeled as an undirected graph G = (V,E)
where vertices represent positions and edges represent
the topology across which the agents move between
vertices. There are two requirements that make the
MAPF problem challenging: (1) the agents must not
collide with each other, that is they never can share a
vertex nor can traverse an edge in opposite directions
and (2) an objective such as the total number of move
actions must be optimized.
We address the MAPF problem from the perspec-
tive of compilation-based techniques. Compilation
is one of the most important techniques used across
computing. In the context of problem solving in ar-
tificial intelligence, the compilation approach reduces
an input problem instance from its source formalism
to a different, usually well established, target formal-
ism for which an efficient solver exists.
Target formalisms are often combinatorial opti-
mization frameworks like constraint programming
/ optimization (CP) (Dechter, 2003), mixed integer
linnear programming (MILP) (J
¨
unger et al., 2010;
Rader, 2010), Boolean satisfiability (SAT) (Biere
et al., 2009), satisfiability modulo theories (SMT)
(Barrett and Tinelli, 2018), or answer set program-
ming (ASP) (Lifschitz, 2019).
Currently compilation-based optimal solvers for
MAPF represent a major alternative to search-based
solvers, that model and solve the problem directly.
We focus in this paper on a recent SMT-based ap-
proach to solving MAPF (Surynek, 2021) that uses
multi-level lazy compilation of MAPF to Boolean sat-
isfiability. The previous approach builds on top the
SMT-CBS, an optimal algorithm, (Surynek, 2019),
that encodes an incomplete specification of the in-
put MAPF instance into SAT. Concretely, collision
avoidance constraints are not encoded at the begin-
ning which may result in solutions that lead to a col-
lisions. After the collisions are detected, collision
avoidance constraints are added to the encoding and
the process is repeated until the collision-free solution
is obtained.
The further step from SMT-CBS is the next level
of laziness called sparsification that adds laziness
in encoding of the set of candidate paths for each
agent. While the original SMT-CBS gives each agent
a chance to chose any of the possible paths, the sparse
version starts with a restricted set of candidate paths
containing only the most promising path. If the search
for non-colliding paths with sparse set of candidate
paths is unsuccessful, the set of candidate paths is ex-
Surynek, P.
Candidate Path Selection Heuristics for Multi-Agent Path Finding: A Novel Compilation-Based Method.
DOI: 10.5220/0011693900003393
In Proceedings of the 15th International Conference on Agents and Artificial Intelligence (ICAART 2023) - Volume 3, pages 517-524
ISBN: 978-989-758-623-1; ISSN: 2184-433X
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
517

tended. The process may end up with all paths in-
cluded but again the solution is often found before all
paths are considered.
Since Boolean formulae, to which the input
MAPF instance is reduced in SMT-CBS, are derived
from the set of candidate paths, the effect of sparsifi-
cation of the set is twofold: (1) it leads to smaller tar-
get Boolean formulae that can be constructed faster
and (2) the satisfiability of formulae can be decided
by the SAT solver faster, altogether improving the
reduction-solving-interpretation loop in SMT-CBS.
The original sparsification technique used the se-
lection of candidate paths so that at least one path for
any subset of detected collisions is taken. Since the
collisions are treated using the ‘or’ connective in this
approach, we call it an OR-path selection heuristic.
In this work, we contribute by a different heuris-
tically guided selection of candidate paths. I contrast
to OR-path selection, we suggest to include one path
that avoids all recenlty discovered collisions. As col-
lisions are threated via the ‘and’ connective, we call
our new approach an AND-path selection heuristic.
An extended version of this paper is available
(Surynek, 2022).
1.1 Multi-Agent Path Finding
We assume discrete time in MAPF. The configuration
of agents at timestep t is denoted as s
t
. Each agent
a
i
has a start position s
0
(a
i
) ∈ V and a goal position
s
+
(a
i
) ∈ V .
At each time step an agent can either move to an
adjacent vertex or wait in its current vertex. The task
is to find a sequence of move/wait actions for each
agent a
i
, moving it from s
0
(a
i
) to s
+
(a
i
) such that
agents do not collide, i.e., do not occupy the same
location at the same time and do not traverse the same
edge in opposite directions.
Formally, a MAPF instance is a tuple Σ = (G =
(V,E),R, s
0
,s
+
) where s
0
: R → V is an initial config-
uration of agents and s
+
: R → V is a goal configura-
tion of agents. A solution for Σ is a sequence of con-
figurations S (Σ) = [s
0
,s
1
,...,s
µ
] such that s
t+1
results
from valid movements from s
t
for t = 1, 2, ..., µ − 1,
and s
µ
= s
+
. Orthogonally to this, the solution can be
represented as a set of paths for individual agents.
Various cumulative objectives are often optimized
in MAPF. We will develop all concepts in this pa-
per for the sum-of-costs objective, denoted SoC. SoC
is the summation, over all agents, of the number
of time steps required to reach the goal. Formally,
SoC =
∑
k
i=1
cost(path(a
i
)), where cost(path(a
i
)) is
an individual path cost of agent a
i
connecting s
0
(a
i
)
calculated as the number of edge traversals and wait
actions.
1
Finding an optimal solution with respect to the
sum-of-costs objective is NP-hard (Yu and LaValle,
2013b; Surynek, 2010) and also determining the exis-
tence of a solution that differs from the optimum by a
factor less than 4/3 is NP-hard too (Ma et al., 2016).
Therefore designing algorithms based on search and
SAT for MAPF is justifiable.
1.2 Compilation-Based Approaches
The idea behind compilation that uses the SAT
paradigm is to construct a Boolean formula whose
satisfiability corresponds to existence of a solution of
the given value of the objective, that is, the formula
encodes bounded instance of MAPF. In our case we
are encoding the question whether there is a solution
of sum-of-costs SoC to a given MAPF Σ.
There are two ways how to connect satisfiability of
the formula and solvability of Σ: using either equiva-
lence or implication.
We say F (SoC) to be a complete Boolean model
of MAPF.
Definition 1. (Complete Boolean Model) Boolean
formula F (SoC) is a complete Boolean model of
MAPF Σ if the following condition holds: F (SoC)
is satisfiable ⇔ Σ has a solution of sum-of-costs SoC.
Complete Boolean models were the used in
makespan optimal SAT-based solvers for MAPF
(Surynek, 2017) and in MDD-SAT (Surynek et al.,
2016), the first sum-of-costs optimal SAT-based
solver. A natural relaxation from the complete
Boolean model is an incomplete Boolean model
where instead of the equivalence between solving
MAPF and the formula we require an implication
only. Incomplete models are inspired from the SMT
paradigm and are used in the recent sum-of-costs
optimal solver SMT-CBS (Surynek, 2019; Surynek,
2021).
Definition 2. (Incomplete Boolean Model).
Boolean formula H (SoC) is an incomplete Boolean
model of MAPF Σ if the following condition holds:
H (SoC) is satisfiable ⇐ Σ has a solution of
sum-of-costs SoC.
Being able to construct formula F one can ob-
tain optimal MAPF solution by checking satisfiabil-
ity of F (0), F (1), F (2),... until the first satisfiable
F (SoC) is met. This is possible due to monotonicity
of MAPF solvability with respect to increasing values
1
The notation path(a
i
) refers to path in the form of a
sequence of vertices and edges connecting s
0
(a
i
) and s
+
(a
i
)
while cost assigns the cost to a given path.
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
518

of common cumulative objectives such as the sum-of-
costs. In practice it is however impractical to start at
0; lower bound estimation is used instead - sum of
lengths of shortest paths can be used in the case of
sum-of-costs.
Construction of F (SoC) relies on the time expan-
sion of underlying graph G. Having SoC, the basic
variant of time expansion determines the maximum
number of time steps µ (also refered to as a makespan)
such that every possible solution of the given MAPF
with the sum-of-costs less than or equal to SoC fits
within µ timesteps (that is, no agent is outside its goal
vertex after µ-th timestep if the sum-of-costs SoC is
not to be exceeded).
The time expansion itself makes copies of vertices
V for each timestep t = 0,1,2,...,µ. That is, we have
vertices v
t
for each v ∈ V time step t. Edges from
G are converted to directed edges interconnecting
timesteps in time expansion. Directed edges (u
t
,v
t+1
)
are introduced for t = 1, 2, ...,µ − 1 whenever there is
{u,v} ∈ E. Wait actions are modeled by introducing
edges (u
t
,t
t+1
). A directed path in time expansion
corresponds to trajectory of a agent in time. Hence
the modeling task now consists in construction of a
formula in which satisfying assignments correspond
to directed paths from s
0
0
(a
i
) to s
µ
+
(a
i
) in the time ex-
pansion.
Assume that we have time expansion (V
i
,E
i
) for
agent a
i
. Propositional variable X
t
v
(a
j
) is introduced
for every vertex v
t
in V
i
. The semantics of X
t
v
(a
i
) is
that it is TRUE if and only if agent a
i
resides in v at
time step t. Similarly we introduce E
t
u,v
(a
i
) for every
directed edge (u
t
,v
t+1
) in E
i
. Analogically the mean-
ing of E
t
u,v
(a
i
) is that it is TRUE if and only if agent a
i
traverses edge {u, v} between time steps t and t + 1.
Once we have the Boolean decision variables
X
t
v
(a
i
) and E
t
u,v
(a
i
) we can introduce constraints so
that truth value assignments are restricted only to
those that correspond to valid solutions of a given
MAPF. The added constraints together ensure that
F (SoC) is a complete propositional model for given
MAPF.
We here illustrate the model by showing few rep-
resentative constraints. For the detailed list of con-
straints we refer the reader to (Surynek et al., 2016).
Collisions between agents can be eliminated by
the following constraint over X
t
v
(a
i
) variables for ev-
ery v ∈ V and timestep t:
∑
a
i
∈A | v
t
∈V
i
X
t
v
(a
i
) ≤ 1 (1)
Next, there is a constraint stating that if agent a
i
appears in vertex u at time step t then it has to leave
through exactly one edge (u
t
,v
t+1
). This can be es-
tablished by following constraints:
X
t
u
(a
i
) ⇒
_
(u
t
,v
t+1
)∈E
i
E
t
u,v
(a
i
), (2)
∑
v
t+1
| (u
t
,v
t+1
)∈E
i
E
t
u,v
(a
i
) ≤ 1 (3)
Other constraints ensure that truth assignments to
variables per individual agents form paths. That is if
agent a
i
enters an edge it must leave the edge at the
next time step.
E
t
u,v
(a
i
) ⇒ X
t
v
(a
i
) ∧ X
t+1
v
(a
i
) (4)
A common measure how to reduce the number of
decision variables derived from the time expansion is
the use of multi-valued decision diagrams (MDDs)
(Andersen et al., 2007; Sharon et al., 2013). The basic
observation that holds for MAPF is that an agent can
reach vertices in the distance d (distance of a vertex is
measured as the length of the shortest path) from the
current position of the agent no earlier than in the d-th
time step. Analogical observation can be made with
respect to the distance from the goal position.
The combination of SAT-based approach and
MDD time expansion is the basis for the MDD-SAT
algorithm. It is important to note that from out per-
spective the MDD can be regarded as a representation
of the set of candidate paths for given agent. In MDD-
SAT, MDDs represent all possible paths that meet the
given makespan and sum-of-costs bounds.
1.3 CBS and Lazy Compilation
Conflict-based search (CBS) (Sharon et al., 2015) is a
popular algorithm for solving MAPF optimally. From
the compilation perspective, the CBS algorithm could
be understood as a lazy method that tries to solve
an underspecified problem and relies on to be lucky
to find a correct solution even using this incomplete
specification. There is another mechanism that en-
sures soundness of this lazy approach, the branch-
ing scheme. If the CBS algorithm is not lucky, that
is, the candidate solution is incorrect in terms of the
MAPF rules, then the search branches for each pos-
sible refinement of discovered MAPF rule violation
and the refinement is added to the problem specifica-
tion in each branch. Concretely, the MAPF rule viola-
tions are conflicts of pairs of agents such as collision
of a
i
∈ A and a
j
∈ A in v at time step t and the re-
finements are conflict avoidance constraints for single
agents in the form that a
i
∈ A should avoid v at time
step t (for a
j
analogously).
Candidate Path Selection Heuristics for Multi-Agent Path Finding: A Novel Compilation-Based Method
519

The idea of laziness of CBS has been combined
with compilation-based approaches in SMT-CBS al-
gorithm. The major difference from the standard CBS
is that there is no branching at the high level. The high
level SMT-CBS roughly correspond to the main loop
of MDD-SAT, that is, the algorithm checks the ex-
istence of MAPF solution for the sum of costs SoC
0
,
SoC
0
+1, SoC
0
+2 until it gets a positive answer from
the SAT solver. SMT-CBS differs from MDD-SAT
in using the incomplete Boolean model in which it
ignores specific between agents at beginning. Colli-
sions are resolved lazily similarly as in CBS.
While the collision between a
i
and a
j
in vertex v at
time step t in standard CBS is resolved as high-level
branching is, in SMT-CBS it is resolved by refine-
ment of F (SoC) with a new disjunction ¬X
t
v
(a
i
) ∨
¬X
t
v
(a
j
).
2 HEURISTICS AND
SPARSIFICATION
Although lazy compilation in SMT-CBS is an impor-
tant factor that reduces the size of generated Boolean
formulae in SMT-CBS compared to MDD-SAT, the
reduction concerns only the conflict avoidance con-
straints for pairs of agents (binary disjunctions). The
number of nodes as well as the number of directed
edges in the MDDs is not reduced by laziness and
hence the number of variables and constraints mod-
eling the existence of directed paths in MDDs in the
target Boolean formula is the same as in MDD-SAT.
It has been suggested in (Surynek, 2021) as part of
the Sparse-SMT-CBS algorithm to reduce the number
of directed paths being encoded. This is done by using
sparse sets of candidate paths for each agent that sat-
isfy given sum-of-costs and makespan bounds. That
is, instead of considering all such paths as done in
MDDs only a relevant subset of them is taken into ac-
count.
Sparse-SMT-CBS uses MDDs to represent the set
of candidate paths, to distinguish it from MDD con-
taining all paths it is refered to as Sparse MDD or
SMDD in short. Given the maximum number of steps
µ and any (sparse) set of paths Π(a
i
) in the time ex-
pansion of G of length at most µ, we are able to con-
struct SMDD
i
that represents Π(a
i
). It is however im-
portant to note that SMDD tends to overestimate the
set of paths being represented, that is, the super-set of
Π(a
i
) is actually represented.
Sparse-SMT-CBS uses identical sum-of-costs and
makespan bounds increasing scheme as SMT-CBS at
the high-level. Each iteration at the high-level re-
solves a question whether there exists a solution to the
input MAPF Σ such that it fits in the current sum-of-
costs SoC and makespan µ. This question is compiled
as a series of Boolean formulae and consulted with
the SAT solver at the low-level.
The low-level in Sparse-SMT-CBS is different
from SMT-CBS. In both algorithms it tries to find a
non-conflicting set of paths satisfying SoC and µ, but
the set of candidate paths from which SMT-CBS se-
lects is fixed in advance in MDD, while Spare-SMT-
CBS starts with a minimal set of candidate paths and
each time a new conflict is discovered the set of can-
didate paths is extended to reflect the new conflict.
Spare-SMT-CBS does so by the OR-path selection
heuristic that finds a path for every subset of the set
of the of conflicts and represents this path in the next
SMDD.
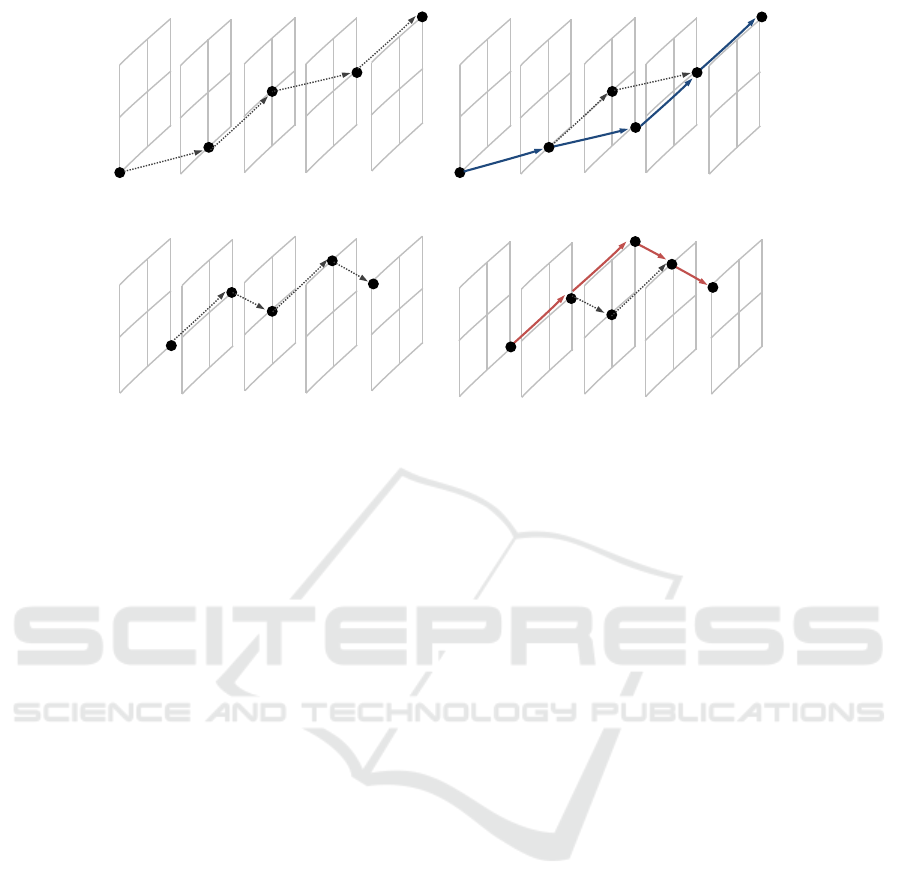
The example of SMDDs is shown in Figure 1. Ini-
tially shortest paths are included in Π(a
i
) connecting
agent’s starting vertex and its goal, one shortest path
per agent. However, the initial choice of paths is poor
leading to a collision in v
5
at timestep 2 which is de-
tected by Sparse-SMT-CBS and alternative paths re-
flecting the conflict are suggested for each agent by
the new-Paths function. The new paths are included
in SMDDs as shown in the right part of Figure 1. For
these new SMDDs, non-conflicting path can be found.
Despite the extension of SMDD with paths sug-
gested by the OR-path selection heuristic yields
SMDD that is smaller than the full MDD. The SMDD
can still be very large for the growing number of con-
flicts. Therefore we suggested a new heuristic called
AND-path selection that adds to SMDD only one path
that avoids all conflicts. Taking into account the over-
estimation of SMDD even one path can add enough
freedom of navigation for the agent using paths being
represented by the SMDD. If such path does not ex-
ists then the algorithm switches to the full MDD mode
that represents all paths satisfying given makespan
and sum-of-costs bounds.
We integrated the SMDD reasoning and the AND-
path selection heuristic into the SMT-CBS frame-
work, designing a new algorithm we called Heuristic-
SMT-CBS. The pseudo-code of Heuristic-SMT-CBS
is shown as Algorithm 1. The encoding used in
Heuristic-SMT-CBS follows MDD-SAT with colli-
sion avoidance constraints omitted but instead of
deriving decision Boolean variables and constraints
from MDDs they are derived from SMDDs. That is,
a Boolean variable X (a
i
)
t
v
is introduced for each node
v
t
in SMDD
i
and a variable E (a
i
)
t
u,v
is introduced
for each edge in SMDD
i
. Constraints are introduced
analogously. Observe that the sparser the SMDDs are
the smaller Boolean model is obtained.
The sparse set of candidate paths is used to build
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
520
SMDD
1
v
1
0
0
v
2
1
1
2
3
4
v
6
3
v
9
4
v
5
2
next SMDD
1
v
1
0
0
v
2
1
1
2
3
4
v
6
3
v
9
4
v
5
2
v
3
2
SMDD
2
v
3
0
0
v
6
1
1
2
3
4
v
8
3
v
7
4
v
5
2
next SMDD
2
v
3
0
0
v
6
1
1
2
3
4
v
8
3
v
7
4
v
5
2
Figure 1: An example of sparse MDDs (SMDDs) for agents a
1
and a
2
. The first iteration yields a conflict in v
5
at timestep 2
between the agents which can be avoided via newly represented paths in the next iteration.
an incomplete Boolean MAPF model F (SoC) (line
14) which is subsequently solved by the SAT solver.
If a satisfying truth-value assignment of F (SoC) is
found (line 16), then it has to be interpreted and
checked against MAPF rules, that is, it is checked for
collisions between agents (line 18). If there are no
collisions, the algorithm can return a valid MAPF so-
lution (line 20). If a collision is detected (lines 21-28),
a proper treatment must be applied.
This includes (1) extending the model F (SoC)
with a collision elimination constraint, a disjunction
forbidding a pair of conflicting actions to take place
at once (lines 21-23) and (2) and extending the sparse
set of candidate paths Π with a new path reflecting
newly discovered conflicts (line 24-29). It may how-
ever happen that no new path could be found after
which the algorithm switches to SMT-CBS mode us-
ing the full MDD as the set of candidate paths.
Without proof let us state the Heuristic-SMT-CBS
algorithm is sound and optimal.
Path included into Π suggested by the AND-path
selection can be found by various shortest path algo-
rithms like A* that take into account the set of con-
flicts.
3 EXPERIMENTAL EVALUATION
We performed an experimental evaluation of
Heuristic-SMT-CBS and compared it against SMT-
CBS, and Sparse-SMT-CBS on standard benchmarks
from movingai.com (Boyarski et al., 2015; Sharon
et al., 2013; Sturtevant, 2012). To provide broader
perspective outside compilation-based techniques
we also include comparison with a vanilla imple-
mentaiton of the CBS algorithm, a search-based
algorithm. Representative part of the results is
presented in this section.
We implemented Heuristic-SMT-CBS in C++ us-
ing the existing implementations of Sparse-SMT-
CBS and SMT-CBS. The existing implementations
of Sparse-SMT-CBS and SMT-CBS were used in the
evaluation as well. All variants of SMT-CBS algo-
rithms are built on top of the Glucose 3.0 SAT solver
(Audemard and Simon, 2018)
As for CBS, we used implementation from (Barer
et al., 2014) written in C#. Although this implemen-
tation of CBS does not use recent MAPF heuristics
like rectangle reasoning (Li et al., 2019) we consider
it suitable for our experiments as implementations
of both Sparse-SMT-CBS and SMT-CBS also do not
rely on heuristics derived from the grid.
The SAT solver we used supports incremental
mode which means that when the formula is ex-
tended with new variables and clauses the solver does
not need to start from scratch but it can use learned
clauses from its previous runs. This incremental
mode is highly utilized across the low-level phase of
SMT-CBS, Sparse-SMT-CBS, as well as Heuristic-
SMT-CBS whenever the target Boolean formula is ex-
tended.
All experiments were run on system consisting of
Xeon 2.8 GHz cores, 32 GB RAM, running Ubuntu
Linux 18.
The experimental evaluation has been done on di-
verse instances consisting of 4-connected grid maps
Candidate Path Selection Heuristics for Multi-Agent Path Finding: A Novel Compilation-Based Method
521

Algorithm 1: SMT-based optimal MAPF solver with heuris-
tically guided sparsification of the set of candidate paths.
1 Heuristic-SMT-CBS (Σ = (G = (V, E),R,s
0
,s
+
))
2 conflicts ←
/
0
3 Π ← {Π
∗
(a
i
) a shortest path from s
0
(a
i
) to
s
+
(a
i
)|i = 1,2, ...,k}
4 SoC ←
∑
k
i=1
cost(Π(a
i
))
5 µ ← max
k
i=1
cost(Π(a
i
))
6 while TRUE do
7 (path,conflicts) ← Heuristic-SMT-CBS-
Fixed(conflicts,Π,µ, SoC,Σ)
8 if paths 6= UNSAT then
9 return paths
10 SoC ← SoC + 1
11 µ ← µ + 1
12 Heuristic-SMT-CBS-Fixed(Π,conflicts,µ,SoC, Σ)
13 while TRUE do
14 F (SoC) ← encode-
Incomplete(Π,conflicts, µ,SoC,Σ)
15 assignment ←
consult-SAT-Solver(F (SoC))
16 if assignment 6= UNSAT then
17 paths ← extract-Solution(assignment)
18 collisions ← validate(paths)
19 if collisions =
/
0 then
20 return (paths, conflicts)
21 for each (a
i
,a
j
,v,t) ∈ collisions do
22 F (SoC) ←
F (SoC) ∪ {¬X
t
v
(a
i
) ∨ ¬X
t
v
(a
j
)}
23 conflicts ←
conflicts ∪ {[(a
i
,v,t), (a
j
,v,t)]}
24 for each a
i
∈ R do
25 π(a
i
) ← new-AND-
Path(Π(a
i
),conflicts(a
i
),µ)
26 if π(a
i
) 6= [] then
27 Π(a
i
) ← Π(a
i
) ∪ {π(a
i
)}
28 else
29 Π(a
i
) ← {all paths as in
MDD}
30 else
31 return (UNSAT,conflicts)
ranging in sizes from small to relatively large.
We varied the number of agents to obtain instances
of various difficulties while initial and goal configu-
rations of agents were generated according to scenar-
ios provided on movingai.com. Depending on the
map size, we generated instances with up to 64 (small
maps) or 128 (large maps) agents and 25 different in-
stances per number of agents. The time limit in all
test was set to 128 seconds. Presented results were
obtained from instances solved within this timeout.
Part of the results are presented in Figures 2. We
present success rate and sorted runtimes. Success
rate shows the ratio of instances solved under the time
limit of 128 seconds out of 25 instances per number
of agents.
The cactus plot for runtime has been generated by
taking runtimes of all instances solved under the time
limit by the given algorithm and sorting them along
x-axis; so the x-th data-point represents the runtime
of x-th fastest solved instance by the given algorithm.
The faster algorithm hence typically yields to a lower
curve in the cactus plot but differences for various re-
gions of the plot can be observed too.
The general trend observable across almost all
maps from success rate and sorted runtimes is
that Heuristic-SMT-CBS represents an improvement
over both SMT-CBS and Sparse-SMT-CBS. The
one exception is the maze-128-128-10 map where
Heuristic-SMT-CBS lost to Sparse-SMT-CBS but the
gap is relatively small and SMT-CBS performs sig-
nificantly worse than other two variants of SMT-
CBS. The behavior of Heuristic-SMT-CBS on the
maze-128-128-10 map can be explained by frequent
non-existence of path generated by the AND-path se-
lection heuristic.
Sorted runtimes comparison also shows that in
Heuristic-SMT-CBS dominates in instances of easy
and medium difficulty. However as the difficulty of
instances grows often Heuristic-SMT-CBS become
worse than Sparse-SMT-CBS. This behavior can be
explained by significant reduction of the size of
SMDD when the number of collisions is not high. In
such a case Heuristic-SMT-CBS constructs only small
SMDD which decreases overall solving runtime. On
the other hand when there are many collisions be-
tween agents, the algorithm switches to full MDD,
that is to the identical mode as SMT-CBS and all pre-
vious growing of SMDD becomes an overhead.
Comparison with CBS shows an expected trend
that due to its negligible overhead, the CBS algo-
rithm dominates in easy instances where SMT-CBS,
Sparse-SMT-CBS, and Heuristic-SMT-CBS need to
deal with complex instance compilation process that
eventually does not pay off. As difficulty of in-
stances grow, the advanced learning mechanisms and
intelligent space search pruning implemented in SAT
solvers has greater impact resulting in better perfor-
mance of compilation-based solvers.
The known disadvantage of SMT-CBS is that
in large maps like warehouse-10-20-10-2-1 or
lak303d it can generate a formulae that are too large
which causes degradation in performance. According
to our experiments it seems that using sparse set of
candidate paths in SMT-CBS helps the solver espe-
cially on large maps - there is a relatively big gap be-
tween SMT-CBS and its variants with sparsification.
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
522
0
0,2
0,4
0,6
0,8
1
0 5 10 15 20 25 30 35 40 45 50 55
Success Rate
Number of agents
Success Rate | room-64-64-8
0,001
0,01
0,1
1
10
100
0 100 200 300 400 500 600 700
Runtime (seconds)
Instance
Sorted Runtimes | room-64-64-8
CBS
SMT-CBS
Sparse-SMT-CBS
Heuristic-SMT-CBS
0
0,2
0,4
0,6
0,8
1
0 10 20 30 40 50 60 70 80 90
Success Rate
Number of agents
Success Rate | maze-128-128-10
CBS
0,001
0,01
0,1
1
10
100
0 200 400 600 800 1000 1200 1400
Runtime (seconds)
Instance
Sorted Runtimes| maze-128-128-10
CBS
SMT-CBS
Sparse-SMT-CBS
Heuristic-SMT-CBS
Figure 2: Success rate and runtime comparison on medium-sized maps.
The reason is that the size of MDDs for large maps
is often prohibitive and causes significant difficulty
for the SAT solver as it needs to deal with a large
formula derived from MDD. Sparsification enables
choosing few promising paths that are represented in
SMDDs which improves both the Boolean formula
construction process as well as its solving. Yet fewer
paths represented in SMDDs generated by the AND-
path selection heuristic leads to an improvement over
Sparse-SMT-CBS.
4 CONCLUSION
We suggested a new heuristically guided selection of
candidate paths for agents in sparsification schemes
for SAT-based approach to multi-agent path plan-
ning (MAPF). The technique aims on currently the
most significant drawback of compilation-based ap-
proaches to MAPF which is the performance on large
graphs.
The original sparsification technique generates
large sets of candidate paths. We mitigated this draw-
back in this work by suggesting a heuristic called
AND-path selection. AND-path selection searches
for the most constrained path with respect to discov-
ered collisions between agents. This path when rep-
resented multi-value decision diagram (MDD) yields
small set of candidate path that still provides enough
movement freedom for the agent.
According to our experiments on a number of
benchmarks, the new algorithm called Heuristic-
SMT-CBS that represents an integration of the AND-
path selection into SMT-CBS, significantly outper-
form Sparse-SMT-CBS, a variant of SMT-CBS with
previous sparsification technique.
ACKNOWLEDGEMENTS
This research has been supported by GA
ˇ
CR - the
Czech Science Foundation, grant registration number
22-31346S.
REFERENCES
Andersen, H. R., Hadzic, T., Hooker, J. N., and Tiedemann,
P. (2007). A constraint store based on multivalued de-
cision diagrams. In Principles and Practice of Con-
straint Programming - CP 2007, Proceedings, volume
4741 of Lecture Notes in Computer Science, pages
118–132. Springer.
Candidate Path Selection Heuristics for Multi-Agent Path Finding: A Novel Compilation-Based Method
523

Audemard, G. and Simon, L. (2018). On the glucose SAT
solver. Int. J. Artif. Intell. Tools, 27(1):1840001:1–
1840001:25.
Barer, M., Sharon, G., Stern, R., and Felner, A. (2014). Sub-
optimal variants of the conflict-based search algorithm
for the multi-agent pathfinding problem. In Proceed-
ings of the Seventh Annual Symposium on Combina-
torial Search, SOCS 2014. AAAI Press.
Barrett, C. W. and Tinelli, C. (2018). Satisfiability modulo
theories. In Clarke, E. M., Henzinger, T. A., Veith, H.,
and Bloem, R., editors, Handbook of Model Checking,
pages 305–343. Springer.
Biere, A., Heule, M., van Maaren, H., and Walsh, T., edi-
tors (2009). Handbook of Satisfiability, volume 185 of
Frontiers in Artificial Intelligence and Applications.
IOS Press.
Boyarski, E., Felner, A., Stern, R., Sharon, G., Tolpin,
D., Betzalel, O., and Shimony, S. E. (2015). ICBS:
improved conflict-based search algorithm for multi-
agent pathfinding. In Proceedings of the Twenty-
Fourth International Joint Conference on Artificial In-
telligence, IJCAI 2015, pages 740–746. AAAI Press.
Dechter, R. (2003). Constraint processing. Elsevier Morgan
Kaufmann.
J
¨
unger, M., Liebling, T. M., Naddef, D., Nemhauser, G. L.,
Pulleyblank, W. R., Reinelt, G., Rinaldi, G., and
Wolsey, L. A., editors (2010). 50 Years of Integer Pro-
gramming 1958-2008 - From the Early Years to the
State-of-the-Art. Springer.
Li, J., Felner, A., Boyarski, E., Ma, H., and Koenig, S.
(2019). Improved heuristics for multi-agent path find-
ing with conflict-based search. In Proceedings of the
Twenty-Eighth International Joint Conference on Ar-
tificial Intelligence, IJCAI 2019, pages 442–449. ij-
cai.org.
Lifschitz, V. (2019). Answer Set Programming. Springer.
Luna, R. and Bekris, K. E. (2011). Push and swap: Fast co-
operative path-finding with completeness guarantees.
In Walsh, T., editor, IJCAI 2011, Proceedings of the
22nd International Joint Conference on Artificial In-
telligence, Barcelona, Catalonia, Spain, July 16-22,
2011, pages 294–300. IJCAI/AAAI.
Ma, H., Tovey, C. A., Sharon, G., Kumar, T. K. S., and
Koenig, S. (2016). Multi-agent path finding with pay-
load transfers and the package-exchange robot-routing
problem. In Proceedings of the Thirtieth AAAI Con-
ference on Artificial Intelligence, 2016, pages 3166–
3173. AAAI Press.
Rader, D. (2010). Deterministic Operations Research:
Models and Methods in Linear Optimization. Wiley.
Ryan, M. R. K. (2007). Graph decomposition for efficient
multi-robot path planning. In IJCAI 2007, Proceed-
ings of the 20th International Joint Conference on Ar-
tificial Intelligence, pages 2003–2008.
Sharon, G., Stern, R., Felner, A., and Sturtevant, N. R.
(2015). Conflict-based search for optimal multi-agent
pathfinding. Artif. Intell., 219:40–66.
Sharon, G., Stern, R., Goldenberg, M., and Felner, A.
(2013). The increasing cost tree search for optimal
multi-agent pathfinding. Artif. Intell., 195:470–495.
Silver, D. (2005). Cooperative pathfinding. In Proceedings
of the First Artificial Intelligence and Interactive Dig-
ital Entertainment Conference, pages 117–122. AAAI
Press.
Standley, T. S. (2010). Finding optimal solutions to coop-
erative pathfinding problems. In Proceedings of the
Twenty-Fourth AAAI Conference on Artificial Intelli-
gence, AAAI 2010. AAAI Press.
Sturtevant, N. R. (2012). Benchmarks for grid-based
pathfinding. IEEE Trans. Comput. Intell. AI Games,
4(2):144–148.
Surynek, P. (2010). An optimization variant of multi-robot
path planning is intractable. In Proceedings of the
Twenty-Fourth AAAI Conference on Artificial Intelli-
gence, AAAI 2010. AAAI Press.
Surynek, P. (2017). Time-expanded graph-based proposi-
tional encodings for makespan-optimal solving of co-
operative path finding problems. Ann. Math. Artif. In-
tell., 81(3-4):329–375.
Surynek, P. (2019). Unifying search-based and
compilation-based approaches to multi-agent path
finding through satisfiability modulo theories. In
Kraus, S., editor, Proceedings of the Twenty-Eighth
International Joint Conference on Artificial Intelli-
gence, IJCAI 2019, pages 1177–1183. ijcai.org.
Surynek, P. (2021). Sparsification for fast optimal multi-
robot path planning in lazy compilation schemes.
In IEEE/RSJ International Conference on Intelligent
Robots and Systems, IROS 2021, Prague, Czech Re-
public, pages 7931–7938. IEEE.
Surynek, P. (2022). Heuristically guided compilation for
multi-agent path finding.
Surynek, P., Felner, A., Stern, R., and Boyarski, E. (2016).
Efficient SAT approach to multi-agent path finding un-
der the sum of costs objective. In ECAI 2016 - 22nd
European Conference on Artificial Intelligence, vol-
ume 285 of Frontiers in Artificial Intelligence and Ap-
plications, pages 810–818. IOS Press.
Yu, J. and LaValle, S. M. (2013a). Planning optimal paths
for multiple robots on graphs. In 2013 IEEE Interna-
tional Conference on Robotics and Automation, 2013,
pages 3612–3617. IEEE.
Yu, J. and LaValle, S. M. (2013b). Structure and intractabil-
ity of optimal multi-robot path planning on graphs. In
Proceedings of the Twenty-Seventh AAAI Conference
on Artificial Intelligence, 2013. AAAI Press.
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
524
