
Automatically Generating Image Segmentation Datasets for Video Games
David Gregory LeBlanc and Greg Lee
Acadia University, Wolfville, Canada
Keywords:
Image Segmentation, Computer Vision, Machine Learning, Deep Reinforcement Learning, Video Games.
Abstract:
Image segmentation is applied to images fed as input to deep reinforcement learning agents as a way of
highlighting key-features and removing non-key features. If a segmented image is of lower resolution than
its source, the problem is further simplified. However, the process of creating a dataset for the training of
an image segmenting network is long and costly if done manually. This paper proposes a methodology for
automatically generating an arbitrarily large image segmentation dataset with a specifiable segmentation res-
olution. A convolutional neural network trained for image segmentation using this automatically generated
dataset had higher accuracy than a network using a manually labelled training set. Furthermore, an image seg-
menting network trained on a dataset generated in this manner gave superior performance to an autoencoder
in reducing dimensionality while preserving key features. The method proposed was tested on Super Mario
Bros. for the Nintendo Entertainment System (NES), but the techniques could apply to any image segmenta-
tion problem where it is possible to simulate the placement of key objects.
1 INTRODUCTION
The motivation for this work originates from a desire
to discover a method of simplifying and generaliz-
ing state inputs to deep reinforcement learning agents,
especially in video game domains. There are many
video games, typically within the same genre, which
convey similar information with their graphics, such
as how most platforming games have the concept of
an enemy object, but utilize different sprites to dis-
play enemies. If the state fed to an agent uses a game-
independent encoding, then the agent should be capa-
ble of producing a more general solution than it would
with a game-dependent encoding, such as pixel data.
Super Mario Bros. (Nintendo, 1985) was chosen
as a subject for the proposed dataset creation method
because it is an NES game: it is one console genera-
tion ahead of where state of the art deep reinforcement
learning agents can reliably outperform humans (e.g.
Atari 2600) while using game-agnostic techniques.
Furthermore, Super Mario Bros. is part of the plat-
former genre, and there are many other well known
games that fall within the same category on the NES
to which the same segmentation scheme could be ap-
plied such as Mega Man (Capcom, 1987), Castlevania
(Konami, 1986), and Adventure Island (Hudson Soft,
1986).
The ability to specify a segmentation resolution
was another key requirement in this work, as a lower
segmentation resolution lowers the memory overhead
for a deep reinforcement learning agent (deep-RL).
NES games have twice the number of pixels per frame
compared to any Atari 2600 game, such as Pong
(Atari, 1972), and later console generations increase
this gap further. Some problems are only possible
to solve with deep reinforcement learning if large
batches are used (Baker et al., 2020), and this may
include these more sophisticated video game environ-
ments. Thus, it is important that a state encoding is
capable of lowering the memory requirements so that
these batches, as well as the experience replay mech-
anisms from which they are sampled (Schaul et al.,
2016), are computationally affordable.
2 RELATED WORK
There are two branches in the state of the art for
state representation in the deep-RL video game do-
main. Firstly, there are those which outperform hu-
mans in modern games such as OpenAI Five in Dota
2 (Berner et al., 2019) which utilize a great deal
of game-specific information in their state represen-
tation. For instance, OpenAI Five utilizes roughly
16,000 inputs to their agent, many of which are mean-
ingless outside of the game of Dota 2 (ex. “is Roshan
definitely dead?”, “time since seen enemy courier...”).
LeBlanc, D. and Lee, G.
Automatically Generating Image Segmentation Datasets for Video Games.
DOI: 10.5220/0011693800003393
In Proceedings of the 15th International Conference on Agents and Artificial Intelligence (ICAART 2023) - Volume 3, pages 509-516
ISBN: 978-989-758-623-1; ISSN: 2184-433X
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
509

In contrast, Agent57 (Badia et al., 2020) utilizes
very little game specific information in its state repre-
sentation, and is capable of outperforming humans in
57 different Atari 2600 games (a much older domain
compared to Dota 2). Its state representation consists
only of pixel-data from the games being played with
some game-agnostic image preprocessing (ex. con-
version to greyscale).
Image segmentation has been utilized in the do-
main of autonomous vehicles to simplify informa-
tion used to make driving decisions (Papadeas et al.,
2021). Popular datasets, used to create these seg-
mentation models, such as the Cityscapes Dataset, are
manually annotated, and can take as long as 1.5 hours
per sample to create (Cordts et al., 2016).
There are some techniques that have been ex-
plored for automating the creation of segmentation
datasets, such as in the domain of hand segmenta-
tion (Bojja et al., 2018). Lasso-type tools, such as
those found in Adobe Photoshop or GIMP, improve
the speed at which a human may segment an image.
3 APPROACH
Algorithm 1 details the proposed automatic data gen-
eration algorithm. If the segmentation resolution (the
size of the grid of segments) is higher than the source
resolution, Algorithm 2 is used to create the segmen-
tation grid. The state of each object is described by
its position in the scene, and the sprite that it is using.
Each sprite should have its own bounding box defined
for the purposes of Algorithm 2.
Static objects are those whose states do not change
past the initialisation of the scene. Semi-static objects
are those with special rules that outline a small num-
ber of states they can be in. Dynamic objects are those
which can appear anywhere in the scene, so long as
they do not overlap with another object. The distinc-
tion between semi-static and dynamic objects is made
because there are many objects in video games that
follow rules that are simple to simulate (semi-static),
and other objects that are difficult to simulate accu-
rately (dynamic objects). An example of a dynamic
object is a player character, where there are many pos-
sible states that the character can be in that depend
on the states of other objects in the environment. By
contrast, a semi-static object could be an animated but
immobile piece of terrain.
Applying this to Super Mario Bros. the main la-
bels are listed below in order of priority, player being
the highest priority label and ground being the lowest
priority label:
Algorithm 1: The data generation algorithm for the plat-
former autolabeller.
1: Labels: A list of possible labels ordered by prior-
ity of segmentation
2: S: The background of the environment being sim-
ulated
3: O: Objects, which are static, semi-static, or dy-
namic. Each object has an associated label from
Labels and a number of sprites which it can dis-
play.
4: N
needed
: Number of samples needed
5: N
current
: Number of samples created so far
6: Grid
x,y
: Label located at (x,y) in segmentation
grid
7: C
x
,C
y
: Camera x and y positions in S
8: Res
h
: Horizontal image resolution
9: Res
v
: Vertical image resolution
10: Screen: region(C
x
,C
y
,C
x
+ Res
h
,C
y
+ Res
v
)
11: Initialise S, create all O
static
, O
semistatic
12: Define all valid C
x
,C
y
for camera
13: while N
current
< N
needed
do
14: Assign random new valid C
x
,C
y
15: Destroy all O
dynamic
16: Instantiate a random valid number of O
dynamic
17: Place O
dynamic
instances randomly within
Screen, do not allow overlapping
18: Randomize sprite used for each O
dynamic
19: Update state of all O
semistatic
20: Grid ← update grid(Grid) {See Algorithm
2}
21: Save Gr id, pixel data of Screen as a sample
22: N
current
← N
current
+ 1
23: end while
Algorithm 2: The grid update function for the platformer
autolabeller.
1: CellW ← Res
h
/width(Grid)
2: CellH ← Res
v
/height(Grid)
3: for CellX ←C
x
, CellX < Res
h
, CellX ← CellX +
CellW do
4: for CellY ← C
y
, CellY < Resv, CellY ←
CellY +CellW do
5: CellRegion ← region(CellX,CellY,CellX +
CellW,CellY +CellH)
6: Find Label, s.t. Label is the label with
highest priority associated with objects in
CellRegion according to Labels
7: Grid
CellX ,CellY
← Label
8: end for
9: end for
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
510

• Player: the object the player controls (Mario,
Luigi). This is a dynamic object, and there is al-
ways exactly one per generated sample.
• Enemy: any hostile object that can be defeated
normally (that is, by jumping on them, or with the
use of a power-up). These are dynamic objects,
and there are up to two of these in a given sam-
ple (There are typically fewer than 2 enemies at a
given time in normal gameplay).
• Hazard: objects that will harm the player on
contact that cannot be defeated normally (e.g.
Bowser, Piranha Plants).
• Ground: objects that may be stood on. These are
a mixture of semi-static objects (e.g. moving plat-
forms that follow a set path) and static objects
(e.g. bricks).
This labelling scheme was designed in such a way
that it could apply to any platformer game, although
some may require some additional labels (perhaps
for power-ups, friendly projectiles, or interactable ob-
jects). Due to the automatic nature of the algorithm,
it is relatively straightforward to edit objects’ classi-
fication. The main source of work for implementing
this algorithm lies in importing the relevant resources
for an object or scene.
Any region of the screen which does not fall into
one of the identified labels (e.g. score indicators or
background objects) is given a none label to indicate
that there are no key features in that region. The
player’s location is a component in all decision mak-
ing in platfomer games, hence its position at the top
of the priority list. Enemies and hazards both take
priority over the ground labels, as it is generally more
advantageous to avoid hazards or enemies than to be
cognisant of whether there is terrain in that same re-
gion. This is especially relevant in Super Mario Bros.
where enemies may be used as a form of terrain if they
are jumped on. Note that in Algorithm 1, dynamic
objects are placed randomly within a room with ran-
dom sprites, and this this can produce screenshots that
are improbable or impossible to reproduce within the
game being simulated. Similarly, it is possible to mix
and match resources from multiple games within a
single dataset.
For example, the enemy sprites could be a mixture
of Super Mario Bros. and Castlevania sprites. The
reasoning behind keeping this behaviour is twofold:
perfectly simulating the source game slows down the
process of creating the simulation, and it may be that
the unconventional placement of sprites leads to the
generation of models that are more general. For in-
stance, it is very rare in Super Mario Bros. for the
player character to be at the very top of the screen, but
in a game with more verticality, such as Mega Man,
such scenarios are common.
For the experiments in this paper, the automatic
labelling algorithm was implemented in GameMaker
using assets from Super Mario Bros. The first world,
consisting of four levels, and the first level of world
2 were simulated. The automatic labeller could gen-
erate samples of the implemented levels at a rate of
165 samples per second. The process of adding a new
level to the simulation consisted of importing the level
as a background to a new room, labelling all the ter-
rain (ground labels), and adding in any special objects
(e.g. moving platforms). This process would take
roughly 1 hour per level added. Some elements of
the game were not added to the simulation; the GUI,
consisting of the white text and flashing coin sprite
was only partially simulated. The coin would flash
as it would in normal gameplay, but all text elements
were left static in the automatically created sets.
In addition to the automatically created datasets,
a manually created dataset was also generated. The
manual labelling software used was created in Python
using Tkinter (Lundh, 1999) specifically for the pur-
poses of this research. The created software fea-
tures hotkeys to switch between label types and im-
ages to increase the speed of labelling. After some
practice using the software, an expert user could pro-
duce one sample every 15 seconds on average (or
0.07 samples per second). Note that this number is
based on the segmentation resolution being 15x15;
a higher segmentation resolution would result in a
slower labelling speed. The 15x15 segmentation res-
olution was chosen for both automatically generated
and manually generated datasets as when dividing the
resolution of Super Mario Bros. this way, each cell of
the segmentation grid corresponds to a roughly 16x16
region of the source image (16x14.9 after overscan),
and many sprites in Super Mario Bros. are comprised
of 16x16 tiles.
The manual dataset and the small automatically
generated dataset consist of 3,734 samples each,
while the large automatic dataset consists of 1 million
samples. Furthermore, the large automatic dataset
took approximately 2 hours to generate unsupervised
in one session, the small automatic dataset took less
than one minute, while the manual dataset took ap-
proximately 24 hours to generate by hand, spread
across 5 sessions. In addition to the time spent la-
belling the manual dataset, an extra hour was spent
playing the game to generate sufficiently diverse
gameplay footage whose frames formed the images
to be labelled. This is necessary to prevent state bias
in a resultant model.
Automatically Generating Image Segmentation Datasets for Video Games
511

In theory, it is possible to generate the images
for manual labelling at a rate matching the game’s
framerate (60 frames per second in the case of Su-
per Mario Bros.), but in practice, many frames have
to be discarded as the gameplay contains irrelevant
images such as game-over screens and menus. In ad-
dition, normal gameplay produces a skewed dataset;
a skilled player may get the player character into a
powered up state, which has its own sprite, and never
reach the other player states that may be seen in the
game. Conversely, an unskilled player would produce
gameplay with few frames in the powered up state.
In addition to the videos whose frames were uti-
lized for the manually labelled dataset, other game-
play videos were recorded for testing purposes. That
is, another set of videos were created with frames
that did not appear in the datasets to act as a test set.
Since the intention for the creation of the test videos
is to benchmark models created from both the manu-
ally and automatically generated datasets, whose seg-
menting methodologies are different, no ground truth
segmentation is given for frames in the test videos.
Due to limitations in the recording environment, the
test videos all suffer from some compression arti-
facts, meaning that there is noise present in the test
videos that would not have been seen in the automatic
dataset. Since the manual dataset was derived from
similar videos, the manual dataset has the advantage
of sharing noise characteristics with the test videos.
To test the viability of the automatically created
dataset, three segmenting models were trained; one
using the full automatic dataset (large automatic seg-
menting model), another with the manual dataset
(manual segmenting model), and finally with one
trained on the small automatic dataset (small auto-
matic segmenting model). All used images from their
respective datasets as input to predict the segmenta-
tion given by the grid in the dataset. They were eval-
uated using test sets generated from the same dataset
they were trained on (although samples from the test
set were not given to the agent during the training
phase), as well as frames from the test video.
The small automatic and manual segmenting mod-
els were subject to 10-fold cross-validation to account
for their small datasets. In those cases, 187 samples
(5% of the total number of samples) of each dataset
were removed prior to the cross-validation process, so
that each model could be evaluated on a fixed test set.
The models with the highest macro averaged F1-score
on their respective test set were selected for further
evaluation using the test videos.
In addition to the segmenting networks, an autoen-
coder was trained on just the image components of the
automatic dataset. Unless otherwise stated in the ta-
bles, all non I/O layers of the neural networks made
use of a ReLU activation function, and all networks
were trained using a 1e-4 learning rate with an Adam
optimizer. Additionally, early stopping was applied
to all training sessions with a patience of 10 epochs
and a minimum delta of 1e-4. Mean Squared Error,
or MSE, was used as the loss function for all investi-
gated models.
Each segmenting model had its own model archi-
tecture and hyperparameters optimized for validation
accuracy on its respective datasets using a combina-
tion of a Hyperband tuner (Li et al., 2018) and hand-
tuning. Table 1 lists the values that were altered dur-
ing the tuning process. Values that do not appear in
the table were not tuned. Table 2, Table 3, and Table
4 give the model architectures for the small automatic
/ manual segmenting models, automatic segmenting
model, and autoencoder, respectively.
As mentioned above: there were some changes
to the networks during the model designing process
that were not determined by the tuner; the manual
and small automatic segmenting models received max
pooling and dropout layers to help in overcoming the
small size of the source dataset and avoid overfit-
ting. While tuning the automatic segmenting model,
hyperparameters were tuned in batches using multi-
ple datasets, with smaller ranges for larger datasets.
Smaller datasets were created of sizes ranging from
100,000 samples to the final 1,000,000 sample dataset
during this process. All networks utilized the same
preprocessing pipeline:
• Crop 8 pixels from each side of the image (over-
scan) to simulate how Super Mario Bros. would
be displayed in an emulator like in Gym Retro
(Nichol et al., 2018).
• Convert the image to greyscale to reduce dimen-
sionality; the RGB channels are combined into
one greyscale channel.
• Normalize all pixel values to the range [0,1] to
reduce absolute distance between similar colors.
When evaluating the segmenting models, each
cell in the predicted segmentation grid has its value
rounded to the nearest integer (label) and clipped to
the range of possible labels, [0,4]. This way, per-class
accuracy can be calculated. To evaluate the autoen-
coder, reconstructions of frames from the test video
were reviewed by a human expert familiar with the
rules and appearance of Super Mario Bros. All ex-
periments were performed on a PC utilizing 32 GB of
RAM, a 3.5 GHz 8 core processor, and an NVIDIA
GeForce RTX 3070 GPU with 8GB of VRAM.
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
512

Table 1: The parameters that were altered during the tuning
process for the automatic and manual segmenting models.
Parameter Considered Values
# Convolutional layers 2, 3
Filters 32,64
Stride 16, 4, 2, 1
Kernel Size 16x16, 8x8, 3x3, 4x4,
2x2, 1x1
Max pooling Yes, No
# Dense Layers 1, 2, 3
Dense Units [32,512], steps of 16
Learning Rate 1e-3, 1e-4, 1e-5
Dropout value 0.0, 0.1
Table 2: Neural network architecture for the manual and
small automating segmentation networks.
Layer Type Details
Input -
Conv2D 64 filters, stride 4, 16x16 kernel
Max pooling -
Conv2D 64 filters, stride 2, 8x8 kernel
Max pooling -
Flatten -
Dense 512 units
Dropout 0.1 chance
Dense 512 units
Dropout 0.1 chance
Dense No activation, n
out puts
units
Reshape Reshape to 2D for output
Table 3: Neural network architecture for the segmenting
model trained on the full automatically generated set.
Layer Type Details
Input -
Conv2D 32 filters, stride 4, 4x4 kernel
Conv2D 64 filters, stride 2, 2x2 kernel
Conv2D 64 filters, stride 1, 1x1 kernel
Flatten -
Dense 128 units
Dense No activation, n
out puts
units
Reshape Reshape to 2D for output
Table 4: Neural network architecture for the autoencoder
trained on the automatically generated set.
Layer Type Details
Input -
Conv2D 16 filters, stride 4, 16x16 kernel
Conv2D 16 filters, stride 2, 8x8 kernel
Dense No activation, n
out puts
units
Conv2D-
Transpose
16 filters, stride 2, 8x8 kernel
Conv2D-
Transpose
16 filters, stride 4, 16x16 kernel
Conv2D 1 filter, stride 1, 3x3 kernel
4 EXPERIMENTS
4.1 Segmentation Comparison
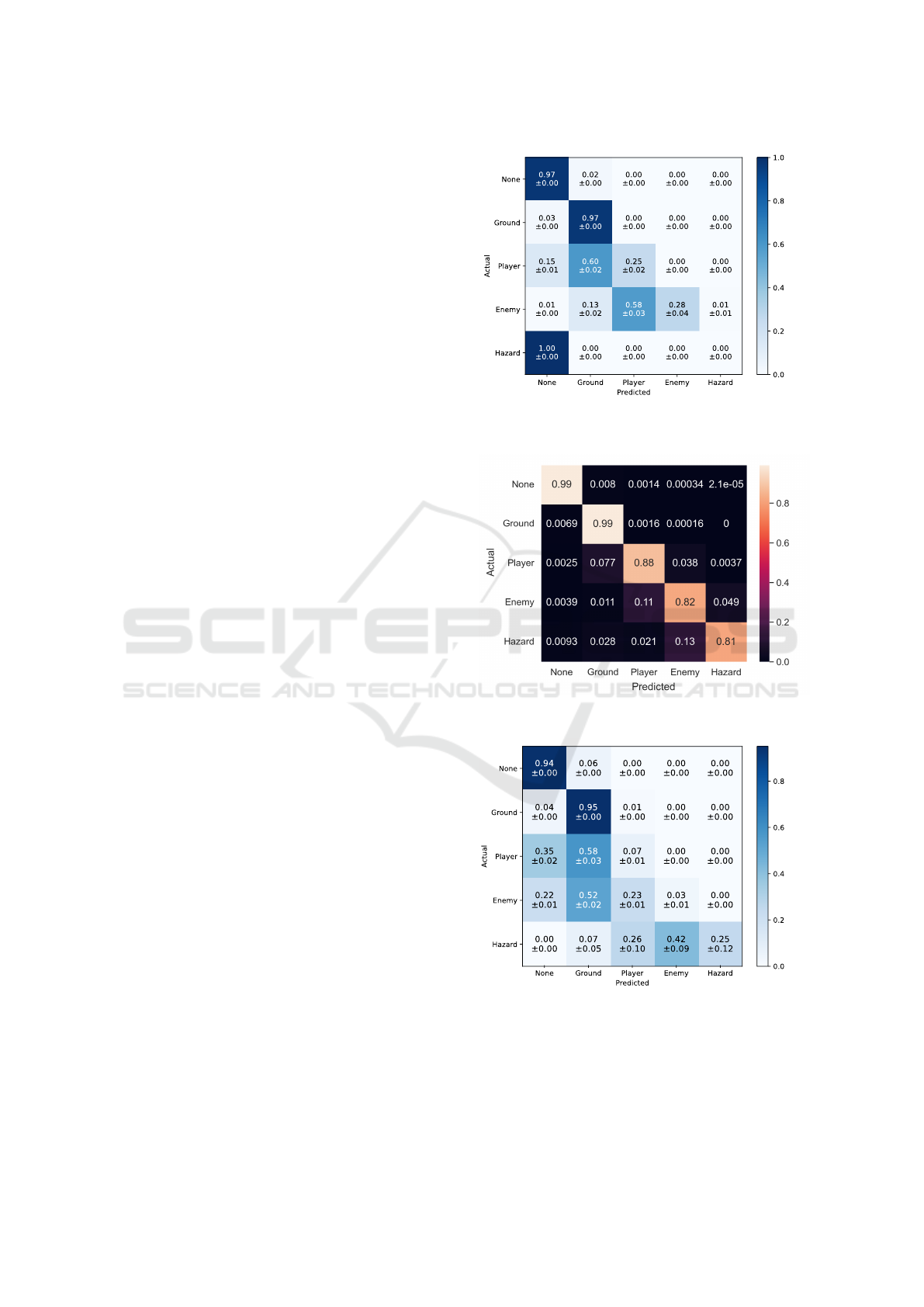
The manual and the automatic segmenting models
gave near perfect accuracy in labelling the ground and
non-key features (none label), with 92-99% accuracy
across the different models. Given that the two most
common labels are ground and none, this result is ex-
pected. These two labels are also the two least vari-
able; configurations of ground and empty space do
not change for a given place in a level, simulated or
not, with the exception of moving platforms, which
comprise a small portion of total ground labels.
The largest performance difference between the
segmenting models is that the large automatic seg-
menting model demonstrates much higher accuracy
in correctly labelling player, enemy, and hazard ob-
jects. The smaller models tend to over-predict ground
labels, likely due to the ground labels being the most
common label, as well as the smallest non-zero label
in the set.
With the information from the confusion matrices,
it was calculated that the manual segmenting model
achieved a macro averaged F1-score of 0.52±0.00 on
its test data (41850 predictions), the automatic seg-
menting model achieved a macro averaged F1-score
of 0.88 on its test set (921600 predictions), and the
small automatic segmenting model achieved a macro
averaged F1-score of 0.48±0.01 (41850 predictions).
By all metrics, the small automatic segmenting model
does not perform as well as the manual model, but
only slightly in comparison to the difference of both
with the large automatic model. In all probability,
this is due to how the manually created data is much
more tightly correlated than the automatically gen-
erated data, as the data is created through gameplay
which has more strict rules than the automatic sample
generation process. For example, in all samples in the
manually generated set, Mario, labelled player, tends
to be close to the ground due to the in-game gravity.
However, the automatically generated sets had Mario
in any position onscreen with equal probability.
The large automatic segmenting model achieves
higher accuracy than the manual segmenting model
on the dynamic and semi-static objects (hazards, en-
emies, and the player) even though those same ele-
ments were more variable in the automatically gen-
erated set than the manually generated set. This sug-
gests that the higher variability may be overcome with
a sufficient number of samples. This is of course
very feasible given the multiple orders of magnitude
in time advantage the automatic approach has over the
manual approach.
Automatically Generating Image Segmentation Datasets for Video Games
513
Most misclassifications by the models are in
nearby classes, which perhaps would be remedied
by encoding the segmentation grids with a one-hot
encoding instead of a unique integer for each label.
Even on samples from the test set, like the compari-
son shown in Figure 2, the large automatic segment-
ing model produced more reasonable predictions of
the encoding. This is despite the test images contain-
ing elements that were not simulated in the training
data. For example, the numbers in the GUI at the top
of the screen are different from what they are any-
where in the training set. It is the case that the GUI
region in the test image is erroneously categorised as
ground in several cells of the prediction in Figure 2,
and this may account for some of the false positives
predicted in the ground class.
In Figure 2 the differences between the labelling
schemes of the datasets can be seen. The manually la-
belled dataset featured closer-fitting segmentations to
most objects, thus the thinner labels for the pipes and
player. The predictions for the automatic segmenting
model could be made closer fitting by adjusting the
bounding boxes of the relevant sprites.
The results from the automatic segmenting model
on the test video demonstrate that a model is capable
of overcoming the noise introduced by the video com-
pression artifacts. This could be useful in situations
where it is not possible to capture noise-free footage.
In summary, the large automatic segmenting
model outperformed the manual segmenting model in
terms of per-class accuracy and summary F1-score,
and neither the imperfect simulation performed to cre-
ate the automatically generated set nor the test video’s
compression artifacts prevented the automatic seg-
menting model from generalizing to footage from the
actual game. Much of the full automatic segment-
ing model’s success may in part be due to the larger
training set. However, the sample creation rate of the
proposed algorithm is higher than that of the manual
approach (165 samples per second, compared to 0.07
samples per second, a difference of 4 orders of mag-
nitude), and these differences would be exacerbated
by a higher segmentation resolution, as there would
be less computation required for each image. That
is, the large automatic model’s performance is repre-
sentative of the sample creation rate increase that the
automatic approach offers over the manual approach.
4.2 Dimensionality Reduction and Key
Feature Preservation
Figure 3 shows the reconstruction of an image from
the test set as created by the autoencoder. Comparing
to predicted encodings created by the automatic seg-
(a) The confusion matrix manual model. 187 samples from
the original dataset were removed from the training set to
form the test set for this confusion matrix.
(b) The confusion matrix for the large automatic model. An
additional 4096 samples were generated to form the test set.
(c) The confusion matrix for the small automatic model.
Like the manual model, 187 samples from the set were re-
moved to form the test set.
Figure 1: Confusion matrices for the segmenting models.
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
514

Figure 2: The predicted segmentation for the segmenting models on an image from a test video. From left to right: the image
being used as input, the manual model’s prediction, the small automatic model’s prediction, and the large automatic model’s
prediction. The bottom source image depicts Mario between two pipes (ground) and a Piranha Plant (hazard).
Figure 3: A reconstruction of a screenshot from Super
Mario Bros. created by the autoencoder (above) and the
source (below).
menting model (Figure 2), a decrease in key feature
preservation is shown. For example, in all test frames
reviewed (a 2 minute, 60fps test video showing recon-
structions alongside the source footage), neither the
player character nor any enemies that were present in
the source frames could be distinguished in the recon-
struction by a human proficient in playing the game.
Furthermore, some of the reconstructions did not con-
tain all of the terrain that was present in the source
image. In the case of the reconstruction shown in Fig-
ure 3, the topmost bricks are completely missing in
the reconstruction.
In contrast, when shown a video containing the
source frames of the same video alongside predictions
made by the automatic segmenting model (Figure 2),
the human expert could identify most key labels and
their associated objects in both images throughout the
video. The automatic segmenting model utilized a
15x15 segmentation resolution, and the autoencoder
utilized a 15x15 latent space. That is, given the same
space to encode key features from the source frames,
the automatic segmenting model preserved more of
the key features than the autoencoder as judged by a
human expert, to the extent that the autoencoder did
not preserve any enemies or player characters.
5 CONCLUSION AND FUTURE
WORK
The proposed algorithm for automatically generating
an image segmenting dataset is capable of producing a
dataset that, when used to train a segmenting network,
leads to a more effective network compared to one
that is trained on a manually labelled dataset created
over a longer period of time.
It is understood that there are some additional
costs to using this algorithm over the manual ap-
proach:
• Sufficient expertise in the environment is required
to craft a sufficiently realistic simulation (e.g. ob-
jects need to be classified as static, semi-static, or
dynamic with proper behaviours).
• Assets from the simulated environment must be
available, or else close replicas need to be pro-
duced.
However, the automatic labelling approach offers
a number of advantages over the manual method:
• Given the greater rate of sample creation com-
pared to the manual approach, it is easier to re-
Automatically Generating Image Segmentation Datasets for Video Games
515

generate the dataset with altered parameters such
as new labels or new objects.
• Automatic labelling leads to perfect consistency
in the labelling process; human error is contained
within the parameter setting process.
• One human expert may have control over the
dataset’s parameters, rather than having a hu-
man expert training a number of less experienced
workers.
• The automatic labelling approach allows the com-
bination of assets which otherwise would not be
seen together, potentially leading to a dataset that
could create a more general model.
From the experiment on the autoencoder, with the
specified latent space size / segmentation resolution
of 15x15, the automatic segmenting model outper-
formed the autoencoder at maintaining key features.
From that result, it is assumed that being able to spec-
ify the segmentation resolution of the dataset is a use-
ful tool in creating a model while seeking to optimize
the amount of space used to summarize key features.
It may be possible to generate a dataset by treat-
ing all game objects as dynamic with the proposed
algorithm, or in other words, placing all game assets
randomly within a screen with no adherence to game
rules. Such an approach was not tested for this pa-
per, as it was assumed that a more realistic dataset
should be used to create more accurate segmentation
models. However, this may be worthy of additional
experimentation.
One of the areas deemed most important in further
evaluating the overarching segmentation approach is
to create deep reinforcement learning agents that use
a segmenting encoding as state input powered by a
model trained on a dataset created with the proposed
methods. This may reveal whether a segmented state
input is a useful component in creating agents capa-
ble of exceeding human performance across a broader
state space, perhaps one that even spans multiple en-
vironments. The utilization of a low segmentation
resolution in the dataset could increase the number
of samples that could be stored in an experience re-
play mechanism, as well as the number of samples
that could be used in a batch in an environment.
Another potential future work of interest is apply-
ing a similar algorithm to a 3D environment. In par-
ticular, automatically creating a traffic dataset for the
purposes of training an autonomous driving agent.
In conclusion, the automatic labelling approach is
an effective way of lowering the time cost of dataset
generation over manual methods. Generating data in
this way enables rapid experimentation with image
segmentation parameters, and as such it should be
used to determine the effectiveness of segmentation
as input to deep reinforcement learning agents.
REFERENCES
Atari (1972). Pong. Atari 2600.
Badia, A. P., Piot, B., Kapturowski, S., Sprechmann, P.,
Vitvitskyi, A., Guo, D., and Blundell, C. (2020).
Agent57: Outperforming the atari human bench-
mark. number: arXiv:2003.13350 arXiv:2003.13350
[cs, stat].
Baker, B., Kanitscheider, I., Markov, T., Wu, Y., Powell,
G., McGrew, B., and Mordatch, I. (2020). Emer-
gent tool use from multi-agent autocurricula. arXiv:
1909.07528.
Berner, C., Brockman, G., Chan, B., Cheung, V., Denni-
son, C., Farhi, D., Fischer, Q., Hashme, S., Hesse,
C., J
´
ozefowicz, R., Gray, S., Olsson, C., Pachocki,
J., Petrov, M., Salimans, T., Schlatter, J., Schneider,
J., Sidor, S., Sutskever, I., Tang, J., Wolski, F., and
Zhang, S. (2019). Dota 2 with large scale deep rein-
forcement learning.
Bojja, A. K., Mueller, F., Malireddi, S. R., Oberweger, M.,
Lepetit, V., Theobalt, C., Yi, K. M., and Tagliasac-
chi, A. (2018). Handseg: An automatically labeled
dataset for hand segmentation from depth images.
arXiv:1711.05944 [cs].
Capcom (1987). Mega man. Nintendo Entertainment Sys-
tem.
Cordts, M., Omran, M., Ramos, S., Rehfeld, T., Enzweiler,
M., Benenson, R., Franke, U., Roth, S., and Schiele,
B. (2016). The cityscapes dataset for semantic urban
scene understanding.
Hudson Soft (1986). Adventure island. Nintendo Entertain-
ment System.
Konami (1986). Castlevania. Nintendo Entertainment Sys-
tem.
Li, L., Jamieson, K., DeSalvo, G., Rostamizadeh, A.,
and Talwalkar, A. (2018). Hyperband: A novel
bandit-based approach to hyperparameter optimiza-
tion. arXiv:1603.06560 [cs, stat].
Lundh, F. (1999). tkinter.
Nichol, A., Pfau, V., Hesse, C., Klimov, O., and Schulman,
J. (2018). Gotta learn fast: A new benchmark for gen-
eralization in rl. arXiv preprint arXiv:1804.03720.
Nintendo (1985). Super mario bros. Nintendo Entertain-
ment System.
Papadeas, I., Tsochatzidis, L., Amanatiadis, A., and
Pratikakis, I. (2021). Real-time semantic image seg-
mentation with deep learning for autonomous driving:
A survey. Applied Sciences, 11(19):8802.
Schaul, T., Quan, J., Antonoglou, I., and Silver, D. (2016).
Prioritized experience replay. arXiv:1511.05952 [cs].
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
516
